Ein Exoskelett für haptisches Feedback im virtuellen Raum - Hochschule Augsburg Interaktive Medien Felix Nölte Betreut von Prof. Dr. Michael Kipp
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Hochschule Augsburg Interaktive Medien Felix Nölte Betreut von Prof. Dr. Michael Kipp Ein Exoskelett für haptisches Feedback im virtuellen Raum Abschlussarbeit 10. Juli 2019

Danksagung Ich möchte mich an dieser Stelle zuerst bei meinem Betreuer Herrn Prof. Dr. Michael Kipp bedanken für die regelmäßigen Treffen in denen er mir jede Frage beantwortete und mit neuen Ansätzen weiterhalf. Bedanken möchte ich mich insbesondere bei meinen Vater Bernhard. Vielen Dank für die fachliche Unterstützung bei den zahlreichen elektrotechnischen Problemen und die schier unendliche Geduld, wenn es mir wieder mal nicht gelang ein neues Bauteil zu betreiben oder wir stundenlang Datenblätter durchforsteten. Danke an meine Mitbewohner, die ein Semester lang ein Kistenlager an Bauteilen und Material in unserer Wohnung ertragen haben. Danke Felix, dass du mir in allen Hoch und Tiefs, bei jedem kaputten Bauteil und jeder verspäteten Lieferung zur Seite standest und für mich da warst.
Inhalt
Inhalt .....................................................................................................................................1
1 Einleitung .......................................................................................................................9
1.1 Mensch-Maschine-Interaktion.......................................................................................... 9
1.1.1 Kommunikation Mensch-Computer .......................................................................................... 10
1.1.2 Kommunikation Computer-Mensch .......................................................................................... 11
1.1.3 Vergleich Kommunikation......................................................................................................... 12
1.2 Ziel der Arbeit ................................................................................................................. 12
2 Grundlagen ..................................................................................................................12
2.1 Haptische Wahrnehmung ............................................................................................... 12
2.1.1 Mechanorezeptoren ................................................................................................................. 15
2.2 Räumliche Hand-Eingabegeräte mit haptischem Feedback ............................................ 16
2.2.1 Produkte .................................................................................................................................. 16
2.2.3 dextrES ..................................................................................................................................... 18
2.3 Elektrostatisch Adhäsive Bremse .................................................................................... 18
2.3.1 Wechselspannung .................................................................................................................... 20
2.3.2 Hochspannung ......................................................................................................................... 20
2.3.3 Sicherheit ................................................................................................................................. 20
3 Aufbau .........................................................................................................................21
3.1 Übersicht ........................................................................................................................ 21
3.2 Bremse ........................................................................................................................... 22
3.3 Schaltplan ....................................................................................................................... 29
3.4 Arduino........................................................................................................................... 30
3.4.1 Serial Schnittstelle .................................................................................................................... 30
3.4.2 H-Brücken-Regelung ................................................................................................................. 30
3.4.3 Pseudo-Code Arduino ............................................................................................................... 32
3.5 Handschuh ...................................................................................................................... 32
3.5.1 Befestigung Elektroden............................................................................................................. 33
3.5.2 Handgelenksmanschette .......................................................................................................... 33
3.5.3 Elektroden................................................................................................................................ 34
3.6 Software ......................................................................................................................... 35
3.6.1 Tracking.................................................................................................................................... 35
4 Studie ...........................................................................................................................39
4.1 Thesen ............................................................................................................................ 39
4.2 Voraussetzungen ............................................................................................................ 39
4.2.1 Testaufbau ............................................................................................................................... 39
4.2.2 Conditions ................................................................................................................................ 40
4.2.3 Fragestellung ............................................................................................................................ 40
4.3 Aufgaben ........................................................................................................................ 40
4.4 Protokoll ......................................................................................................................... 44
4.4.1 Protokollsoftware ..................................................................................................................... 44
4.4.2 Fragebogen .............................................................................................................................. 44
Einleitung 6
4.5 Durchführung ................................................................................................................. 44
4.6 Teilnehmer ..................................................................................................................... 45
5 Ergebnisse ....................................................................................................................46
5.1 Nach Test ........................................................................................................................ 46
5.1.1 Objektbewegung ...................................................................................................................... 46
5.1.2 Psychophysik Kontakt ............................................................................................................... 48
5.1.3 Physophysik Verlust.................................................................................................................. 49
5.2 Abschlussfragen.............................................................................................................. 50
6 Bewertung....................................................................................................................51
7 Fazit .............................................................................................................................52
8 Verzeichnis ...................................................................................................................53
8.1 Literatur-und Quellverzeichnis ....................................................................................... 53
8.3 Abbildungsverzeichnis .................................................................................................... 56
9 Anhang .........................................................................................................................57
Einleitung 7 Abstract In dieser Arbeit wurde ein Exoskelett für haptisches Feedback an einem Handschuh im virtuellen Raum konstruiert. Vorlage war das Projekt „dextrES“ der ETH Zürich. Für die dabei verwendete elektrostatisch-adhäsive Bremse wurde zuerst die benötigte Hochspannungs-Wechselstromquelle gebaut und anschliessend der Handschuh konstruiert. Zur Steuerung kam ein Arduino zum Einsatz, der auf Computer-Seite mit einer Processing- Anwendung kommuniziert. Der Handschuh wurde in einer Nutzerstudie hinsichtlich seiner Fähigkeiten getestet und erwies sich als unterstützend, Objekte im virtuellen Raum präziser zu greifen. Das haptische Feedback hilft, beim Greifen den Abstand der greifenden Finger zueinander zu halten, indem es der Bewegung einen Widerstand entgegen setzt.
Einleitung 8
Einleitung 9 1 Einleitung Zwischen Mensch und Maschine verschmelzen unsere Welten zunehmend. Dank großer technischer Fortschritte ist die unsere Welt dem Computer in nahezu allen Dimensionen zugänglich. Mit einer Vielzahl an Techniken kann er sie erfassen und in ihr interagieren, sie manipulieren. Dasselbe gilt nicht für den Zugang des Menschen zur virtuellen Welt. VR System bauen Welten auf und lassen sie uns ansehen. Doch während die Grafik immer besser wird, wird besonders bei haptischen Reizen immer deutlicher, wie wenig das virtuelle derzeit noch zugänglich ist. Diese Diskrepanz wird insbesondere auf dem Gebiet der Haptik deutlich. Wir können mit unseren Händen in der Virtualität agieren, doch wir sehen es nur, spüren es nicht. Haptisches Feedback soll diese Lücke schliessen und eine Aktion in Interaktion verwandeln. 1.1 Mensch-Maschine-Interaktion Mensch-Computer-Interaktion (MCI) beschreibt die Wissenschaft der Wechselbeziehung zwischen Menschen und Computer. Im Englischen ist der der Begriff Human-Computer- Interaction (HCI) gebräuchlich. [13] Obwohl im Grunde jeder Rechner an mindestens einem Punkt seiner Logik in Beziehung zum Menschen steht, liegt der Beginn der MCI als Disziplin erst in den 80er Jahren des letzten Jahrhunderts. Mit Erfindung des Transistors 1947[21] lassen sich Schaltkreise in immer rasanterem Tempo miniaturisieren. Der erste Mikroprozessor 1971 von Intel legt den Grundstein für eine Entwicklung, bei der Rechner immer leistungsfähiger, aber gleichzeitig kompakter wurden. Mit steigender Leistung konnten Rechner bedeutend komplexere und vielfältigere Aufgaben bewältigen, während die Miniaturisierung dafür sorgte, dass immer mehr Menschen Zugang zu einem Computer fanden. Spätestens mit dem Commodore C64, der ab 1983 millionenfach den Weg in westliche Haushalte fand[21], ist die Wandlung des Computers von einem kontextspezifischen Nischenprodukt hin zum Heimcomputer als Universal-Werkzeug für den Massenmarkt vollendet. Der gewachsene Befehlssatz, der nun auch von nicht-Wissenschaftlern und -Spezialisten benutzt wurde, forderte die Entwicklung verständlicher und praktikabler Bedienkonzepte abseits von Lochkarten und Kommandozeilen und näher an der menschlichen Interaktion. Hier liegt der Ursprung der Mensch-Computer-Interaktion. Die Herausforderung lautet damals wie heute: „[Das] Selbstverständnis [der Informatik] über eine rein formale, technik-immanente Sichtweise hinaus weiter [zu] entwickeln“[13] Die Benutzung eines Computers ist keine einseitige Aufgabe. Der Mensch kommuniziert Befehle, die der Rechner ausführt und deren Ergebnis er, z.B. über einen Bildschirm, dem Menschen anzeigt. Aufgrund dieser Informationen entscheidet dieser wiederum die nächste Eingabe. Beide Seiten befinden sich in einer Wechselbeziehung und interagieren miteinander. [3]

Einleitung 10
Um Stand und Entwicklung dieser Wechselbeziehung genauer zu betrachten, soll die
gegenseitige Kommunikation in jeder Richtung in ihre Dimensionen zerlegt werden.
1.1.1 Kommunikation Mensch-Computer
Für die Kommunikation des Menschen in Richtung Maschine ist nach wie vor meist eine
Tastatur vorhanden. Diese dient der Eingabe von Text, denn das Serialisieren eines Wortes in
seine einzelnen Zeichen und Buchstaben ist einem Großteil der Weltbevölkerung ein
vertrautes, meist tief verinnerlichtes Konzept aus der Basisbildung im Buchstabieren.[8]
Zu ihrem Nachteil gehört das notwendige Mapping der Zeichen auf ihre korrespondierenden
Tasten. Ist dies einmal erlernt, sorgt die hohe Geschwindigkeit und weltweite Verbreitung
dafür, dass die Tastatur auch bei sehr kompakten Geräten wie Smartphones, die Text-
Eingabemethode der Wahl geblieben ist.[13]
Wenn abseits geschriebener Texte, andere Befehle kommuniziert werden sollen, erweist
sich die Tastatur schnell als nachteilig, denn für eine Nachricht an den Computer muss zuerst
der passende Befehl aus einem gültigen Satz gefunden werden, bevor anschließend das
zugehörige Zeichenkette in einzelne Buchstaben zerlegt getippt werden kann. Die hohe
Distanz zwischen Intention und Ausführung macht die Bedienung über getippte Kommandos
wenig intuitiv. Das gilt selbst für Aktionen, denen auf der Tastatur eigene Tasten gewidmet
sind, wie den Pfeiltasten für die horizontale und vertikale Navigation, denn der gedankliche
Umweg bleibt hoch.[19]
Mit dem Aufkommen der graphischen Oberflächen, gehört die Computermaus schnell zum
Standardzubehör[27] und erschließt der Kommunikation in Richtung Rechner eine weitere
Dimension: das Räumliche.
Seitdem sind zahlreiche weitere Möglichkeiten entstanden, die Stück für Stück der
Kommunikation von Mensch zu Maschine weitere Dimensionen verliehen haben. Genannt
seien hier unter anderem Kameras, Mikrofone, Zeichentabletts mit drucksensiblen Stiften
aber auch Technologien wie Gyroskope, Accellerometern und GPS-Sensoren, die Aufschluss
über Ort und Lage zulassen.
Bedeutender Beitrag ist die Entwicklung berührungsempfindlicher Bildschirme, die die
Position eines Fingers als Eingabe ohne räumliche Übersetzung einer Position auf dem
Bildschirm als Ausgabemedium bringt. Realität und Virtualität wachsen zusammen, indem
einerseits die Dimensionen gleich sind und nicht mehr skaliert wie bei der Maus,
andererseits wird die dritte Dimension nicht länger unzugänglich, sondern wird über die
Berührung binär erfassbar.
Der Umweg der Maus als skalierte Projektion eines räumlich versetzen Zeigers auf dem
Bildschirm entfällt, in dem der Finger selbst zum Zeiger wird. So wird der Anspruch der
Intuitivität erfüllt, welche wie folgt definiert werden kann:
INTUITIV
„Das unmittelbare Erkennen, welches nicht diskursiv (methodisch) ist und
auf keiner Reflexion (prüfendes Nachdenken) beruht.“ [19]
Mit Beginn des Jahrhunderts eröffnet insbesondere das Gebiet der virtuellen Realität
zahlreiche Dimensionen der Kommunikation. Die stereoskopisch-optische Überwachung desEinleitung 11 Raums durchbricht die visuelle Trennung zwischen Mensch und Maschine. Diese lernen immer mehr Informationen aus dem was sie sehen abzuleiten und erkennen Menschen und ihre Position und können sogar einzelne Emotionen ableiten. Die Summe der Eingabemethoden die dem Mensch am Computer zur Verfügung stehen, hat dazu geführt, dass ein Großteil menschlicher Kommunikation heute von Computern erfasst werden kann. Erst wenn eine Technologie eine vorherige ohne Nachteile ersetzen konnte, sind manche Systeme verdrängt worden. Beispielhaft ist die Anekdote Steve Jobs‘, dem Mitgründer von Apple Computers, der zeit seines Lebens die Erfindung der Computermaus für sich beanspruchte. Bei deren Einführung im Computer der Firma, setzte er durch, dass dafür die Pfeiltasten der Tastatur gestrichen werden, fest in dem Glauben, sie wären durch die Maus ersetzbar. Die darauffolgenden Beschwerden der Kunden sollten im Unrecht geben. Besonders in Tabellen-und Textanwendungen wurde die Möglichkeit vermisst, eine definierte Einheit (Buchstabe, Zeile, Spalte) in eine definierte Richtung zu navigieren. Dem ist das Konzept der Maus mit einem Bildschirmpunkt als Einheit in Präzision unterlegen. Bis heute verlangen Nutzer nach Pfeiltasten, nicht als Ersatz zur Maus, sondern als zusätzliche Dimension der Interaktion. Viele Videocomputerspiele legen das Steuerkreuz nicht auf die vorgesehenen Tasten auf der rechten Seite der Tastatur, sondern auf die Buchstaben WASD, die bequem mit der linken Hand betätigt werden, während die rechte weiterhin die Maus bedient.[17] 1.1.2 Kommunikation Computer-Mensch Während die Möglichkeiten des Menschen mit dem Computer zu kommunizieren stets gewachsen sind, fand diese Entwicklung in die andere Richtung wesentlich ärmer statt. Computer kommunizieren fast ausschließlich visuell. Informationen und Nachrichten stellen Computer pixelbasiert da. Hier hat auch die meiste Entwicklung stattgefunden: von monochromen Elektronenröhren zu farbigen Monitoren, wurde zuerst die Farbdarstellung realistischer, bis zuletzt immer weiter die Pixeldichte und -Anzahl gesteigert wurde. [6] Systeme für virtuelle Realität vermitteln über stereoskopische Darstellung, auch einen Teil der dritten räumlichen Achse visuell. Neben der visuellen Dimension ist die auditive Kommunikation eine Stärke heutiger Computer. Nahezu jedes System besitz eingebaute Lautsprecher. Hochwertige Systeme, meist noch extern angebunden, können mit einer Vielzahl an Schallwandlern hoch realistische Tonwelten generieren, dessen Kulisse nur wenige von der Realität zu trennen vermögen. [14] Nennenswert ist zuletzt die Fähigkeit vieler Geräte, haptisches Feedback zu geben. Dies hat sich insbesondere bei Mobiltelefonen als Signalgeber durchgesetzt, findet jedoch vereinzelt schon Verwendung zur Simulation haptischer Strukturen. So kommen manche Trackpads ohne mechanische Schalter aus. Druck wird über Sensoren gemessen, davon abhängig simulieren leichte Vibrationen das Überwinden eines Druckpunktes, wie er bei einem Schalter vorhanden wäre. [20]
Grundlagen 12
1.1.3 Vergleich Kommunikation
Betrachtet man die Interaktion zwischen Mensch und Computer so fällt auf, dass die Breite
kommunizierbarer Informationen ein großes Ungleichgewicht aufweist.
Computer können eine Vielzahl an Komponenten ihrer Umwelt wahrnehmen. Dies öffnet
zahlreiche Dimensionen, in denen der Mensch mit dem Computer kommunizieren kann:
visuelle, auditive und haptische Informationen können allesamt wahrgenommen und
verarbeitet werden.
In die andere Richtung sind Computer noch größtenteils auf das Visuelle und Auditive
beschränkt.
Selbst die rasante Entwicklung im Bereich der virtuellen Realität kann dieses Missverhältnis
nicht lösen. Es stellt sogar neue Anforderungen: während bei zweidimensionalen Anzeigen,
die räumlich Distanz zwischen Mensch und Computer wahrnehmbar ist, so verschwimmt sie
bei VR-Anwendungen, soll theoretisch sogar verschwinden.
Die hohen Fortschritte in visueller Darstellung und auditiver Wahrnehmung fördern eine
hohe virtuelle Präsenz, also ein starkes Gefühl des Nutzers, sich physisch tatsächlich in dieser
Welt zu befinden. Passt die haptische Wahrnehmung nicht zu diesem Eindruck, wir die
Diskrepanz umso stärker wahrgenommen.
1.2 Ziel der Arbeit
Die haptische Wahrnehmung stellt eine große Hürde in der Maschine zu Mensch-
Kommunikation dar.
In dieser Arbeit soll ein Handschuh für haptischem Feedback im virtuellen Raum gebaut
werden. Als Grundlage dient das Projekt „dextrES“ der ETH Zürich.
Die entstandene Konstruktion wird anschließend hinsichtlich ihres Effekts in einer
Nutzerstudie evaluiert.
2 Grundlagen
2.1 Haptische Wahrnehmung
Die Terminologie rund um die Haptik ist sehr unsauber getrennt.
Erste Definitionen gehen auf das Jahr 1851 von Weber und Wagner zurück. Sie beschreiben
Auf der einen Seite die taktile Wahrnehmung einer Oberfläche als eine passive
Wahrnehmung, die über den Tastsinn gebildet wird. Dem entgegen wird die Haptik gesetzt,
die den Tastsinn aktiv, zum Ertasten von Objekten benutzt.[38]
Diese Trennung ist heute noch in zahlreichen Werken zu finden, wissenschaftlich jedoch
unbrauchbar.[11] Der Mensch nimmt Oberflächen mit denselben Sinnesorganen wahr mit
denen er Objekte begreift.
Die heutige Wissenschaft versteht daher Haptik als Überordnung für das Zusammenspiel von
Taktilität und Kinästhetik.[11] Daraus lassen sich folgende Definitionen ableiten.
Taktilität = Eigenschaften einer Berührung
Kinästhetik = Zustand eines Bewegungsapparates
Haptik = Taktilität / Kinästhetik
Taktilität beschreibt die Eigenschaften einer Oberfläche bei Berührung.Grundlagen 13
Kinästhetik beschreibt den Zustand eines Bewegungsapparats.
Aus diesen zwei Größen lässt sich die Haptik ableiten: sie ist die Oberfläche in Abhängigkeit
eines Bewegungsapparates. Sie besagt, wie sich ein Objekt an seiner Oberfläche verhält,
wenn Kräfte darauf einwirken. [11]
Wenn ein Mensch ein Objekt mit zwei Fingern greift, gewinnt er über die Haptik nicht nur
Informationen über die Oberflächenbeschaffenheit, sondern kann durch das Verhältnis von
Druck am Finger in Abhängigkeit von ausgeübter Kraft, beispielsweise auch die Härte eines
Gegenstandes erkennen: steigt der Druck des Objektes auf den Finger nur leicht, wenn beide
Finger zusammenbewegt werden, handelt es sich um einen weichen Gegenstand. Wenn sich
trotz angesetzter Kraft, beide Finger nicht zusammenbewegen und der Druck auf die Haut
am Finger zusammen mit der Kraft ansteigt, ist das Objekt hart.
Der Begriff der Haptik wird teilweise auch als Systemoberbegriff oder als die Fähigkeit eines
Systems Berührungen zu erkennen verwendet. Diese Darstellung ist nicht zielführend.
Stattdessen soll hier die menschliche Wahrnehmung der definierten Größen abgegrenzt
werden.
Die taktile Wahrnehmung wird auch Oberflächenwahrnehmung genannt und bezeichnet den
Eindruck, den ein Lebewesen von einer Oberfläche gewinnt. Dies geschieht meist mit den
Händen, prinzipiell ist jedoch die gesamte Haut des Menschen taktil empfindlich.
Gebildet wird die taktile Wahrnehmung aus vier verschiedenen Stimuli: Mechanisch,
Thermal, Elektrisch und Chemisch.[15]
Kinästhetisch wahrgenommen bedeutet das Verhältnis der Körperteile zueinander
wahrzunehmen. Auch Propriozeption genannt wird es der Tiefensensibilität zugeordnet.
Mithilfe von Reizen über Körperkräfte, Körperlage, Ausrichtung der Gliedmaße und
Gelenkwinkel bildet die Kinästhetik ein genaues Bild unseres skeletalen Körpers und verrät
auch, welche Kräfte wir nach auf unsere Umwelt wirken lassen.[15]
Aus diesen Informationen bildet sich die haptische Wahrnehmung. Es ist die Taktile
Wahrnehmung in Abhängigkeit der kinästhetischen Wahrnehmung.[15] Diese
Wahrnehmung muss nicht mit der tatsächlichen Physik des Objektes übereinstimmen. Ein
ungekochtes Ei fühlt sich wie ein fester Körper an, wenn man es nur leicht berührt. Dass es
innen flüssig ist, verrät die haptische Wahrnehmung erst, wenn es mit genug Kraft zum
Brechen gebracht wird.
Wahrnehmung = bewertete Empfindung[24]
Taktile Wahrnehmung = Wahrnehmung einer Berührung
Kinästhesische Wahrnehmung = Wahrnehmung des Bewegungsapparates
Haptische Wahrnehmung = taktile Wahrnehmung /
kinästhesische WahrnehmungGrundlagen 14
Abbildung 1 Bestandteile der Haptik[11]
Basierend auf den Definitionen von Taktilität, Kinästhetik, Haptik und ihren Pendants in der
Wahrnehmung, sollen nun auch die Komponenten haptischen Feedbacks definiert werden.
Feedback soll dabei die Kommunikation des Computers in Antwort auf eine menschliche
Eingabe sein.
Taktiles Feedback ist eine Taktilität (Oberflächeneigenschaft), die genutzt wird um eine
Wahrnehmung beim Menschen zu erzeugen. Irrelevant ist ob diese Wahrnehmung der
tatsächlichen Taktilität entspricht. Beispielsweise kann eine Vibration nicht als Vibration,
sondern als ein Klicken wahrgenommen werden und somit sowohl Einfluss auf
wahrgenommene Taktilität als auch Kinästhetik haben.[25]
Kinästhetisches Feedback ist demzufolge eine Kinästhetik, die Wahrnehmung beim
Menschen erzeugt. Hier ist ebenfalls irrelevant, ob diese Wahrnehmung der tatsächlichen
Kinästhetik entspricht. Es ist sogar ausgesprochen schwierig, rein kinästhetisches Feedback
zu erzeugen, da der Mensch fast vollständig von empfindbarer Haut umschlossen ist und
anliegende Kräfte unweigerlich auch darauf einwirken.
Beide Arten von Feedback beeinflussen die haptische Wahrnehmung des Nutzers, indem die
zugrundeliegende taktile und kinästhetische Wahrnehmung manipuliert werden. Von
haptischem Feedback spricht man dann, wenn diese manipulierte Wahrnehmung in Relation
zueinander steht.
Nimmt der Nutzer beispielsweise seinen Finger als erhitzt (infolge von Feedback) wahr, ist
dies nur taktiles Feedback. Entsteht diese Wahrnehmung jedoch immer nur dann, wenn er
wahrnimmt, ein Objekt zu berühren, handelt es sich um haptisches Feedback.
Taktiles Feedback = Taktilität, die genutzt wird um eine Wahrnehmung zu
erzeugen
Kinästhetisches Feedback = Kinästhetik, die genutzt wird um eine
Wahrnehmung zu erzeugen
!"#!$%&'(#$)ä'!+&!$',+&' .&&/0",#
Haptisches Feedback = !"#!$%&(#$)ä'!+&!$',+& 1"+2)&+34)5Grundlagen 15 2.1.1 Mechanorezeptoren Um die Möglichkeiten der Einflussnahme auf die haptische Wahrnehmung zu verstehen, sollen die für ihre Empfindung verantwortlichen Mechanorezeptoren als physiologische Grundlage betrachtet werden. Rezeptoren lassen sich anhand ihrer Adaption klassifizieren. Sie gibt an, wie lange es dauert bis ein konstanter Reiz nicht mehr empfunden wird. Als Eigenschaft bestimmt Sie, ob ein Rezeptor Signale dauerhaft empfinden kann oder nur die Änderung eines Signals. Man teilt Sie daher in langsam adaptierende SA (slowly adapting) und schnell adaptierende RA (rapidly adapting) Zellen ein. [11], [20] Merkelzellrezeptoren (SA-I) empfinden dauerhaft Druck vertikal zur Hautoberfläche und sind dafür langsam adaptierend. Mit einer Größe von 7-12 mm2 sind sie relativ klein. In der Haut liegen sie weit oben in der Epidermis. An Fingerkuppen kommen auf jeden Quadratmillimeter bis zu vier Merkelrezeptoren. Da jede Zelle ein weitaus größeres Empfindungsfeld hat, können sie dank Triangulation auch sehr kleine Berührungen verorten. Mit ihrer Drucksensibilität werden Erhebungen und Vertiefungen wahrgenommen, auch die Reizintensität ist kodiert. Sie sind vor allem für die taktile Wahrnehmung verantwortlich. [24] Ruffini-Körperchen (SA-II) sind ebenfalls langsam adaptierend, sind mit 50-75 mm2 aber wesentlich größer. Sie kodieren ihre Dehnung und das dauerhaft. In der Dermis (Lederhaut) unterhalb der obersten Hautschicht gelegen, erkennen sie laterale Kräfte und helfen die Richtung einer externen Kraft zu bestimmen. Auch in den Gelenkkapseln vorhanden, lässt ihre Dehnung dort auf die Gelenkstellung Rückschlüsse. Sie sind Hauptbestandteil der kinästhetischen Wahrnehmung.[7], [20], [24] Meissner-Körperchen (RA-I) sind das schnell adaptierende Pendant zum Merkelzellrezeptor. Sie liegen tiefer, sind aber ähnlich klein. Erfasst werden Veränderungen eines Drucks. Daraus erkennbar sind Höhenveränderungen von ca. zwei Mikrometern. Zusammen mit den Vater- Pacini-Körperchen erkennen sie Vibrationen, ihre Hauptaufgabe besteht jedoch im Registrieren vertikaler Oberflächenstrukturen, womit sie den Hauptanteil an allen mechanischen Rezeptoren stellen. [29] Vater-Pacini-Körperchen (RA-II) registrieren Beschleunigungen, also Veränderungen der Geschwindigkeit. 100-300mm2 groß sind sie am tiefsten in der Unterhaut (Subkutis) gelegen. Aus den Reizen der Pacini-Körper werden Intensität einer Kraft abgeleitet, was insbesondere beim Erkennen von Vibrationen zum Einsatz kommt. Mit einer Verteilung von über zwei Zentimetern sind sie relativ ungenau einen Stimulus zu verorten, aber hochsensibel was die Beschleunigung betrifft. [15] Die genannten Mechanorezeptoren bilden zusammen im Gehirn die taktile und kinästhetischen Wahrnehmung. Gleichwohl Taktilität für den Menschen auch nicht- mechanische Reize, wie beispielsweise die Temperatur, einschließt, sollen im Rahmen dieser Arbeit nur mechanische Komponenten der Haptik betrachtet werden.
Grundlagen 16
2.2 Räumliche Hand-Eingabegeräte mit
haptischem Feedback
Auf dem recht jungen Markt für haptische
Handschuhe gibt es derzeit noch wenige für
Verbraucher verfügbare Geräte. Den größten
Teil stellen Kickstarter-Projekte, deren
Entwicklung noch nicht fertig gestellt ist. Es
gibt aber auch vielversprechende
kommerzielle Produkte
2.2.1 Produkte
2.2.1.1 Dexmo
Abbildung 2 DEXMO Handschuh (Quelle: dextarobotics.com)
Dexmo von DextaRobotics ist ein Force-
Feedback Handschuh aus Plastik. Durch die
hohe Anwinklung des Exoskeletts werden
Kräfte von bis zu 0.5Nm gezielt auf die
Fingerspitze übertragen. Das geschieht über
Seile in den Gliedern mittels Motoren.
Darüber hinaus wird so auch die Handstellung
überwacht sodass keine externe Tracking-
Lösung notwendig ist.
Im Juni 2019 war das 300g schwere Produkt
nur als Entwickler-Edition verfügbar.[9]
2.2.1.2 Senso
Senso möchte haptisches Feedback über Vibrationen generieren. Dazu sind in einem
Handschuh an mehreren Punkten Vibrationsmotoren mit linearer Massebewegung
angebracht.
Senso wurd in einer Kickstarter-Kampagne geboren und ist mittlerweile auch für
Verbraucher erhältlich.
Da neben den Vibratoren auch Beschleunigungssensoren auf die Finger verteilt sind, kann
das System die Position der Finger zur Hand berechnen, sodass auch hier ein externes
Tracking entfällt.
Mit der selben Technik vertreibt der Hersteller auch einen Ganzkörperanzug.[32]
Ziel der Technik sind im Gegensatz zu den meisten anderen Produkten keine
Freizeitanwendungen, sondern die Industrie.
Abbildung 3 Senso-Handschuh mit vibrotaktilem Feedback und
Beschleunigungssensoren (Quelle: senso.me)Grundlagen 17
2.2.1.3 VRgluv
Diese Handschuhe erinnern optisch an Science-Fiction der 80er Jahre, sind aber tatsächlich
für die moderne Oculus Rift konstruiert.
VRgluv-Handschuhe bringen Kräfte über Seile und Motoren auf. Als Alleinstellungsmerkmal
sind sie mit Batterien ausgestattet und
kommunizieren kabellos mit dem Host-System.
Seit einer erfolgreichen Kickstarter-Kampagne 2017
dringen nur selten Updates zum Stand der
Entwicklung nach aussen.[5]
2.2.1.4 Gloveone
Der Liste der „in Entwicklung befindlichen“
Kickstarter-Produkte schliesst sich „Gloveone“ an.
Das Versprechen, realistische Berührungen mithilfe
von Vibrationen zu simulieren, wurde bei einem
Abbildung 4 VRgluv kabelloser Force-Feedback-
Prototyp auf der Gamescon zuletzt nicht erfüllt. [4] Handschuh, in Entwicklung (Quelle: vrgluv.com)
2.2.1.5 Plexus
Abbildung 5 Plexus Handschuh mit taktilem Feedback und Tracking
Rein taktil arbeitet auch der Plexus-Handschuh von plexus.im. Er
unterscheidet sich durch eine flexible Gummikonstruktion und die
Möglichkeit verschiedenste VR-Controller zu befestigen. So soll er
sich besser in bestehende Systeme integrieren lassen.
Abbildung 6 Plexus (Quelle: plexus.im)
2.2.1.6 HaptX
Das wohl derzeit vielversprechendste Forschungsprojekt ist der HaptX-Handschuh. Er
arbeitet mit einem hochkomplizierten pneumatisch und hydraulischen System. Pneumatisch
wird kinesthetisches Feedback generiert, während
hydraulisch kleinste Druckpunkte am Finger mit
Flüssigkeit gefüllt, taktile Reize geben. Diese
Flüssigkeit kann sogar in verschiedenen
Temperaturen fliessen.
Abbildung 7 Mit Flüssigkeit füllbare
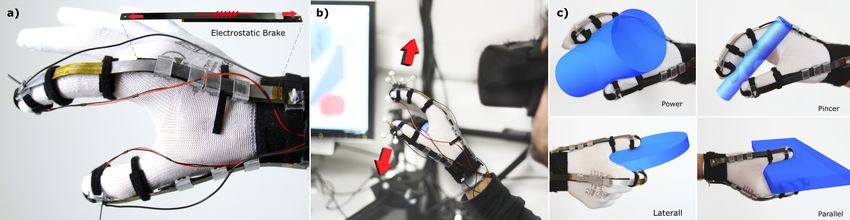
Punkte des HaptX-HandschuhsGrundlagen 18 2.2.3 dextrES Abbildung 8 dextrES-Handschuh mit Schema der elektrostatischen Bremse[16] Einen interessanten Weg, Kräfte an der Hand zu generieren, macht sich das Projekt „dextrES“ an der ETH Zürich zunutze. In diesem Forschungsprojekt wurde ein Force- Feedback-Handschuh entwickelt, der mittels elektrostatischer Bremsen die Bewegung der Gelenke blockiert. Die der benutzte Bremsmechanismus ist physikalisch korrekt als „elektrostatisch adhäsive Bremse“ zu bezeichen. Diese sind auf einem Baumwollhandschuh mit Klettverschluss angebracht und können bei Bedarf blockieren. Zusätzlich sind in den Fingerspitzen Vibrationsmotoren verbaut, die die Berührung mit einem virtuellen Objekt signalisieren. Obwohl über den Widerstand der ER-Bremse technisch machbar, erkennt dextrES seine Gelenkstellung nicht selbst und ist auf externes Tracking angewiesen. Die Arbeit „dextrES“ ist Vorlage für den Bau des Handschuhs in dieser Arbeit. 2.3 Elektrostatisch Adhäsive Bremse Elektrisch adhäsive Bremsen stammen aus der Robotik Forschung und werden besonders in der Erforschung von Exoskeletten verwendet. [30] Auch der Begriff „Elektrostatisch adhäsive Bremse“ oder „Elektrostatische Bremse“ findet Verwendung und wird teilweise mit „ES-Bremse“ abgekürzt.[16] Sie zeichnen sich durch kurze Reaktionszeiten, ihr geringes Gewicht und flache Bauweise aus. Ihre Kraftpotenzial liegt im Bereich der menschlichen psychophysikalischen Wahrnehmbarkeitsgrenzen.[30]
Grundlagen 19 Für ihren Aufbau werden zwei elektrisch leitfähige Streifen parallel aneinander gelegt und durch eine isolierende Schicht voneinander getrennt. Elektrotechnisch bilden sie damit einen Kondensator aus zwei Elektroden und der isolierenden Schicht als Dielektrikum. Als solcher kann darin elektrische Ladung gespeichert werden. Dies geschieht indem zwischen beiden Elektroden eine Spannung angelegt wird. Während die eine Seite positiv geladen wird, geschieht dies bei der anderen Seite negativ. Physikalisch gesehen entsteht auf einer Elektrode ein Elektronenüberschuss (elektrostatische Ladung), auf der anderen ein Mangel. Das Ungleichgewicht sorgt für ein magnetisches Feld in dem sich beide Seiten gegenseitig anziehen. Das Dielektrikum sorgt dafür, dass es nicht zum Ladungsausgleich kommt. [30] Abbildung 9 Schema der elektrostatisch adhesiven Bremse (aus dem dextrES Projekt)[16] Im ungeladenen Zustand, können beide Elektroden aufeinander gleiten. Die Reibung ist dabei zu vernachlässigen, wenn das richtige Dielektrikum in Bezug auf das Material der Elektroden gewählt ist. Ist der Kondensator jedoch ausreichend geladen, wirkt die Anziehungskraft der Elektroden zueinander so stark, dass es zwischen Dielektrikum und Elektroden zur Adhäsion kommt.
Grundlagen 20 Adhäsion beschreibt den Zustand zweier Oberflächen, die eine enge Bindung miteinander eingehen. Dabei entwickeln selbst physikalisch komplett glatte Körper bei Scherung Reibung. Diese Reibung sorgt dafür, dass jeder scherenden Kraft eine Bremskraft entgegengesetzt wird. [10][16] Ist die Bremskraft gleich der Scherkraft, spricht man vom vollständigen Blockieren der Bremse. Der wesentliche Vorteil dieser Bauart von Bremse liegt im einfachen Aufbau und geringen Materialbedarf, wodurch sehr leichte Konstruktionen möglich sind. [16] Des weiteren ist die Kraft nahezu sofort verfügbar und mit Verschwinden der Ladung ebenso schnell vergangen. 2.3.1 Wechselspannung Ein Kondensator besitzt eine maximale Kapazität. Sinnbildlich gibt sie an, wie viele Elektronen auf eine Elektrode passen. Ist diese Kapazität vollständig geladen, kann kein Strom mehr fließen. Unter dieser Bedingung können viele Stromquellen die Ausgangsspannung nicht oder nur sehr ungenau (Abweichungen von +200% möglich) regeln.[39] Dieses Problem behebt das Laden mit einer Wechselspannung. Bei regelmäßiger Phasenverschiebung werden die Elektroden des Kondensators in abwechselnder Polarität geladen. Dadurch wandern bei jedem Wechsel Elektronen in die vormals defizitäre Elektrode und strömen aus der vormals geladenen. Statt einem unendlichen Widerstand besitzt ein Kondensator im Wechselstromkreis einen Blindwiderstand, der konträr zu Kapazität und Frequenz skaliert.[31] 2.3.2 Hochspannung Um die elektrostatisch adhäsive Bremse zu betrieben, wird allerdings eine vergleichsweise hohe elektrische Spannung zum Laden der Elektroden benötigt. Nennenswerte Kräfte über 2N werden unabhängig von verwendeter Konstruktion erst jenseits 300V erreicht[10], [16], [30]. Das dextrES-Projekt eines haptischen Handschuhs der ETH-Zürich stellte für ihre Konstruktion aus Aluminiumelektroden und Polyamid-Dielektrikum eine Wahrnehmungsschwelle bei 800V Betriebsspannung fest und betrieb ihr Modell mit 1.500V.[16] 2.3.3 Sicherheit Bei derart hohen Spannungen stellt sich die Frage der Sicherheit des Menschen während der Bedienung. Während technisch möglich[30][16], ist es beim Prototyping aufwendig, elektrisch geladene Teile zu isolieren.[16] Trägt ein Mensch von einem Kontakt mit Strom einen Schaden davon, spricht man von einem „Stromunfall“. Dieser kann von nur mikroskopisch wahrnehmbaren Zellschädigungen bis hin zum Tod reichen. Bis 50V isoliert die menschliche Haut Ströme zuverlässig. Im Bastelbereich wird meist bis 30V gearbeitet. Einzige Gefahr sind Verbrennungen an erhitzten Bauteilen, wie sie beispielsweise oft bei Kurzschlüssen vorkommen können.[12] Reicht die Isolation der Haut nicht aus, fliest Strom durch den Körper. Entscheidend ist dann insbesondere die Stromstärke.
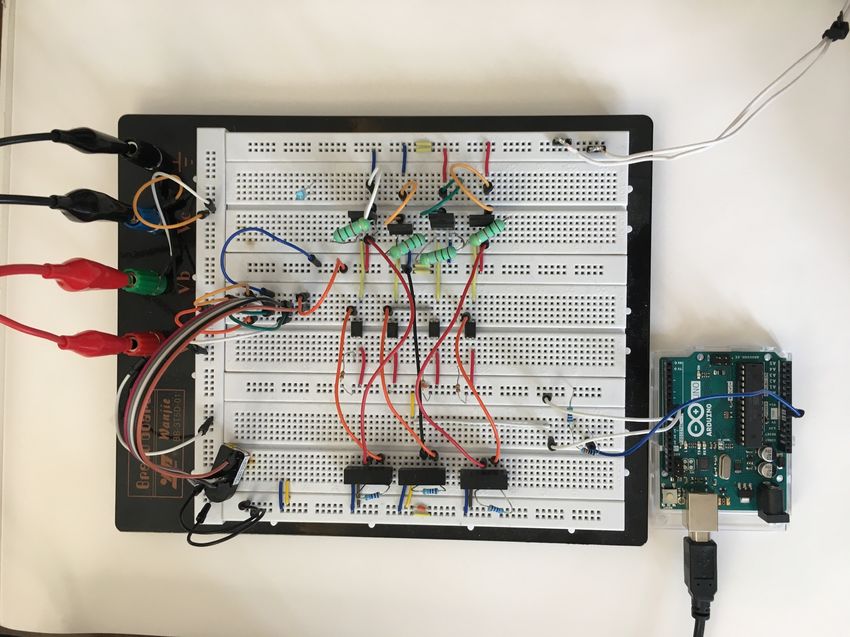
Aufbau 21 Dessen primäres Gefahrenpotenzial liegt in ihrem Einfluss auf das Nervensystem, welches ebenfalls mit elektrischer Ladung arbeitet. Externe Ströme können zu ungewollten Muskelkontraktionen führen. Die Loslassschwelle bezeichnet den Strom, bei dem ein Loslassen der Quelle gerade noch möglich ist. Sie liegt für Kleinkinder bei 3mA, 6mA für erwachsene Frauen und 9mA bei Männern.[23] Ernsthafte Schäden wie Herzrhythmusstörungen können ab 15mA auftreten[12]. Die hier genannten Zahlen sind allesamt Richtwerte. Sie können von Person zu Person stark schwanken und sind von vielen Faktoren, wie Hautfeuchte, Temperatur und Körperbeschaffenheit abhängig. Die Erforschung hoher Spannungen am menschlichen Körper ist ethisch und rechtlich schwierig, sodass konkrete Ergebnisse selten und oft veraltet sind. Die in der Arbeit verwendete Stromquelle begrenzt die Leistung auf 1W, sodass bei 1kV maximal 1mA fließen kann. Berührungen sind in höchstem Maße unangenehm, fördern jedoch keine wahrnehmbaren Verbrennungen. Sie traten nur bei elektrotechnischen Experimenten auf. Keine der Versuchspersonen in der Studie berichtete über Wahrnehmung einer Spannung. 3 Aufbau 3.1 Übersicht Abbildung 10 Schema elektrotechnischer Aufbau: USB-Schnittstelle, Controller(Arduino), Hochspannungsquelle+H-Brücke, elektrostatisch adhäsive Bremsen als Kapazitäten (v.l.n.r) Die Elektrotechnik zum Betrieb des Handschuhs besteht im wesentlichen aus drei Komponenten. Ein Controller erhält Steuerbefehle über eine USB-Schnittstelle. Auf deren Basis wird eine H- Brücke geschalten und so die Betriebsspannung (VCC) auf die elektrostatischen Bremsen (CAPACITOR 1 und 2) gelegt.
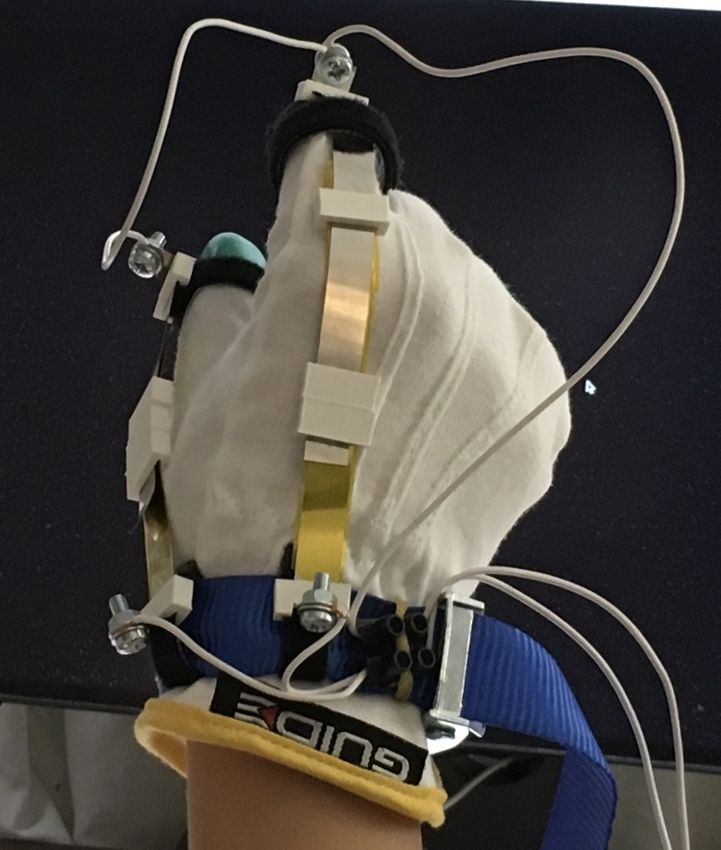
Aufbau 22 Abbildung 11 Hochvoltquelle(oben links), H-Brücke(Mitte) und Arduino auf Steckbrett montiert. Anschluss ES-Bremse unten rechts 3.2 Bremse Die Konstruktion der elektrostatischen Bremsen orientiert sich an Erfahrungen des dextrES- Projektes.[16] An die jeweils zwei Elektroden gelten hohe Anforderungen. Sie müssen genug Kraft entwickeln können und diese gleichzeitig möglichst effektiv auf den jeweiligen Finger übertragen. Die Arbeit „dextrES“ erwähnt lediglich dass es sich um „stainless steel sheets“ handelt.[16] Unter Edelstahl gibt es jedoch mehrere Werkstoffe, sodass hier einige Anforderungen berücksichtigt werden sollten. Entscheidend für den Einsatz als Exoskelett am Handschuh ist die Streckgrenze. Sie definiert bis zu welchem Krafteinsatz ein Material federnd, d.h. zurückkehrend zur ursprünglichen Form, bleibt. Die Streckgrenze muss hoch genug sein, um Bewegungen der Finger zu folgen, dabei aber nicht die Form zu verlieren. Gleichzeitig darf sie nicht zu hoch sein, damit der Stahl bei der Konstruktion mit Werkzeug bearbeitbar ist.[33]
Aufbau 23 Um angenehm zu tragen zu sein, soll das Material möglichst leicht sein. Voraussetzung für die Funktion der Bremse ist elektrische Leitfähigkeit und eine glatte adhäsive Oberfläche. Erfüllt werden diese Eigenschaften von Federstahl mit der Werkstoff-Nummer 14310 nach EN 10088-2. Entgegen konventionellem Edelstahl besitzt er eine höhere mechanische Beanspruchbarkeit und ist trotzdem noch bearbeitbar, wenn auch nur mit Werkzeug. Bei einer Dicke von 0,1mm wiegt ein Quadratzentimeter nur 0,08g. Das ist geringfügig mehr als konventioneller Edelstahl (14301), kann jedoch vernachlässigt werden.[34] Zum Einsatz kommen 10cm lange Streifen mit 10mm Breite aus 0,1mm starkem Federstahl. Die Zuleitungen aus Kupferkabeln wurden über Schrauben und Muttern angebracht. Versuche mit Löten und Bohren erwiesen sich mit üblichem Werkzeug nicht erfolgreich. Das Dielektrikum muss die Elektroden elektrisch voneinander isolieren und gleichzeitig unter Kraftaufwand adhäsiv wirken. Es muss auf ein Elektrode angebracht werden. Diese Eigenschaften erfüllen viele Klebebänder. In Versuchen funktionierte selbst transparentes Haushalts-Klebeband („tesa-Film“). Je dünner das Dielektrikum ist, desto stärker wird die Wirkung des Magnetfeldes. Unterschiede sind im Mikrometer-Bereich messbar. Die ETH-Zürich verklebt daher eine dünne Folie Polyamid (13 Mikrometer) mithilfe eines konduktiven Klebstoffes. Dadurch wird der Kleber Teil der Elektrode, die Wirkung ist „erheblich gesteigert“[16] Isotropisch leitende Klebebänder mit weniger als 20 Mikrometer Dicke waren zum Zeitpunkt dieser Arbeit in Deutschland als Verbraucher auch nach langer Recherche nicht erhältlich. Zur Verwendung kam ein 50 Mikrometer starkes Polyamid-Band auf Silikonkleber, das dem Markenprodukt „Kapton“ baugleich ist. Als Breite wurde 12mm gewählt, um die 10mm breiten Elektroden mit einem Spielraum von 1mm vollständig zu bedecken. So wird ein ungewollter Ladungsübertritt verhindert und die Wirkung nicht beeinträchtigt. Die Konstruktion aus Federstahl und Polyamid-Klebeband erwies sich in Versuchen als ausreichend, um der Abduktion des Zeigefingers einen deutlichen wahrnehmbaren Widerstand entgegenzusetzen. 3.2.1.1 Hochvoltquelle Die benötigte Spannung von mindestens 800V (siehe Hochspannung 2.3.2) liegt bei einem Vielfachen der deutschen Netzspannung von 230V. Wie im Kapitel Sicherheit (2.3.3) erwähnt sind Hobby-Versuche meist auf 50V begrenzt. Labornetzteile mit geregelten Konstantspannungen im Kilovolt-Bereich sind daher dem professionellen Markt vorbehalten und rufen Preise von mehreren Tausend Euro auf. Das Projekt PetaPicoVoltron (https://petapicovoltron.com) liefert eine Open-Source-Vorlage für den Selbstbau einer regelbaren Hochvolt-Stromquelle. Diese kam auch an der ETH-Zürich für den Handschuh dextrES zum Einsatz. Deren Ergebnisse zeigen, dass die Reibung der damit gesteuerten Bremse über 1kV nicht mehr zuverlässig skaliert und ein Plateau erreicht.[16]
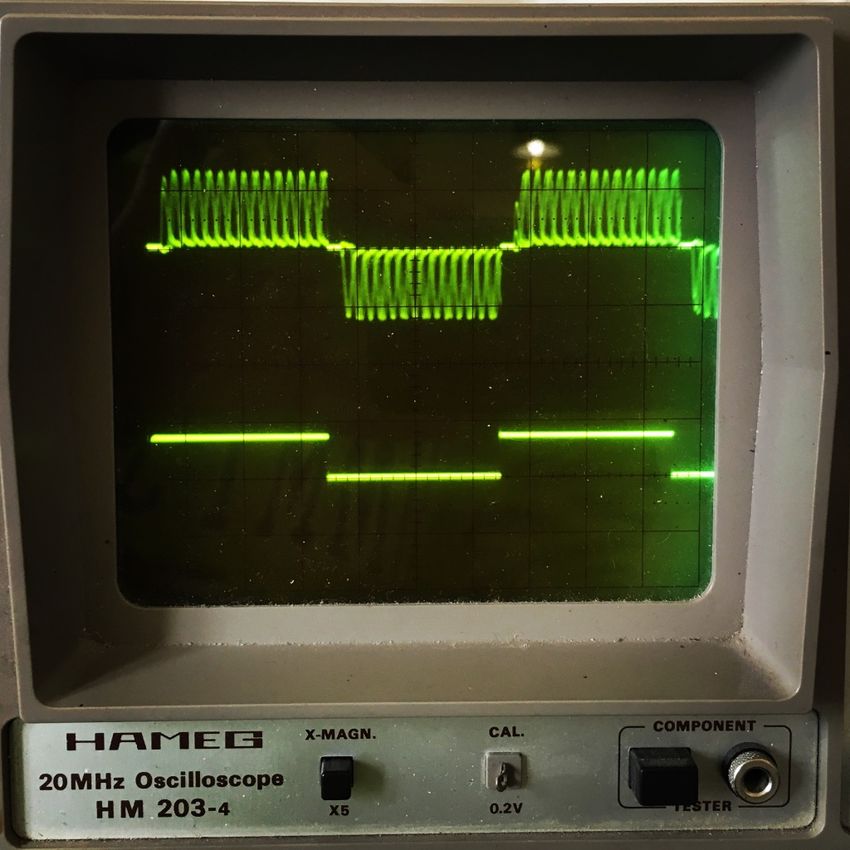
Aufbau 24 Auf Basis dieser Erkenntnis, soll die Betriebsspannung auf 1000V festgelegt sein. Die Konstruktion eines regelbaren Netzteils entfällt. Bei der Suche nach infragekommenden Hochspannungsquellen wurde auf eine geringe elektrische Leistung geachtet, um die Stromstärke auf das sicherheitsrelevante 1mA zu beschränken. 3.2.1.1.1 Hia4u1.4 Abbildung 12 DC-DC Step Up HIA4u1.4 (Quelle: aliexpress.com, nicht weiter angegeben) Zuerst getestet wurde zuerst ein markenloses Step-Up-Modul mit der Bezeichnung „hia4u1.4“, das im Internet günstig als Importware aus China und Südostasien (5-15€) verkauft wird. Ein Datenblatt war nicht zu finden. Die Magnetwirkung war deutlich feststellbar und wurde aus ausreichend bewertet. Das Modul hatte lautstarkes Spulenfiepen im Betrieb. Problematisch war die Spannungsregelung. Über ein Potenziometer konnte das Verhältnis der Ausgangs- zur Eingangsspannung grob geregelt werden. Dies war jeden Tag erneut erforderlich, da die Werte um bis zu 100Volt schwankten. Mithilfe eines Oszilloskopes wurde die Ausgangsspannung an der H-Brücke analysiert. Hierbei ist zu erkennen, dass die Spannungsquelle stark oszilliert und dabei in jedem Zyklus gegen null fällt.
Aufbau 25 Abbildung 13 hia4u1.4 hinter H-Brücke: Ausgangsspannung (AC) oben, Steuersignal Arduino (DC) unten. 20Hz, 800V 3.2.1.1.2 XPpower A10P-12 Zweites getestes Modul ist ein Hochspannungswandler der Firma XPpower (ehemals EMCO). Die A-Serie sind hoch miniaturisierter DC-DC-Wandler mit 1W Leistung. Ihre Spannung lässt sich über einen Steuereingang regeln. Sie finden auch bei PetaPicoVoltron Verwendung. Das Modell A10P-12 wandelt 12 Volt zu maximal 1000V bei 1mA und erfüllt damit die gesteckten Anforderungen, auch bezüglich der Sicherheit. Von Vorteil ist die kleine Bauweise mit nur 5,66 gramm und einem Volumen von 1,696 cm3. Für eine Ausgangsspannung relativ zur Eingangsspannung kann der Steuerpin mit dem Eingang verbunden werden.[40]
Aufbau 26 Abbildung 14 Funktionsprinzip xpPower A-Series DC to HV DC[40] Der Spannungswandler von XPpower hat sich in der Praxis als wesentlich zuverlässiger erwiesen. Die eingestellte Spannung wird zuverlässig gehalten und oszilliert weniger als das markenlose Vergleichsmodul. Die effektive Spannung ist daher höher. Nachteilig ist der hohe Preis von 105€ (inkl. MwSt und Zoll), der die Projektkosten bei ungeschultem Umgang schnell steigen lässt.
Aufbau 27 3.2.1.3 H-Brücke Um die hochvolte Gleichspannung in eine Wechselspannung zu überführen, wurde eine H- Brücke konstruiert. 3.2.1.3.1 Prinzip Die Technik nimmt ihren Namen von der H-Form, die die Komponenten im Schema darstellen. Abbildung 15 Schema H-Brücke Mittels vier schaltenden Bauteilen kann eine Gleichspannung (VCC) in zwei Polaritäten auf eine Leitung geschalten werden. Man trennt die Schalter in jeweils zwei spannungszugewandte(VCC) HighSide und spannungsabgewandte (GND) LowSide-Elemente. Jeder Schalter hängt an einer der beiden Phasen 1 oder 2. Liegt an Phase1 ein Steuersignal an, schliessen HighSide1 und LowSide1 den Stromkries. Die Folge ist eine Spannung am Messpunkt AC von links nach rechts. Liegt wiederum das Signal nur an Phase2 an, liegt die Spannung in entgegengesetzter Richtung von rechts nach links an.
Aufbau 28 Wichtig ist es, beide Phasen nie gleichzeitig zu schalten, da es sonst zum Kurzschluss kommt. Abhängig von eingesetzten Bauteilen und deren Schaltverzögerungen kann es notwendig sein, Latenzen bei der Besteuerung zu beachten.[1] 3.2.1.3.2 Hochvolt-Transistoren Geschalten wird die Hochspannung mit N-Kanal Transistoren, genauer MOSFETs (MetallOxid Semiconductor Field Effect Transistors). Sie besitzen die drei Pins Drain, Gate und Source. Drain wird mit Spannungsquelle verbunden, während Source an die Masse geschlossen wird. Sobald zwischen Gate und Source ein Potenzial größer dem Potenzial zwischen Drain und Source anliegt, wird der Kreis zwischen Drain und Source geschlossen, sodass Strom fließen kann.[26] Wie hoch der Potenzialunterschied dafür sein muss, gibt die Drive-Spannung an. Liegt sie beispielsweise bei 10V, und es soll eine Spannung von 20V geschalten werden, so muss zwischen Gate und Source ein Potenzial in Höhe von 30V anliegen. Um dies zu erreichen wird die Masse der Drain-Spannung mit der Masse der Gate-Spannung verbunden. Das eingesetzte Modell NDFPD1N150C von ON Semiconductor kann bis zu 1500V schalten bei einem Drive von 10V. Die bereits erwähnte Schaltverzögerung beträgt laut Datenblatt 0.45 Micro Sekunden.[26] 3.2.1.3.3 Gate-Spannung Der verwendete Arduino Uno liefert an seinen Digitalausgängen maximal 5V[2] und ist somit erstens alleine nicht in der Lage die Transistoren der H-Brücke zu schalten; zweitens ist es sinnvoll, den Arduino galvanisch vom Hochspannungskreis zu trennen, damit kein Strom zwischen beiden Systemen fliessen kann. Hierfür erhält jeder HighSide-Mosfet eine galvanisch getrennte Steuerspannung durch DC- DC Wandler des Typs TMA0512S. 5V Eingang werden zu galvanisch getrennten 12V konvertiert, was ausreicht um die Hochvolt-Transistoren zu schalten.[36] Damit die Ausgangsspannung geregelt dem Mosfet-Gate angelegt werden kann, wird dazwischen ein Optokoppler geschalten. Anders als Mosfets können Optokoppler nur geringe Spannungen schalten, halten dabei jedoch beide Stromkreise voneiander getrennt. Sie sollen bei 5V Schaltspannung vom Arduino den 12V-Stromkreis zwischen DC-DC-Wandler und dem Gate-Pin des jeweiligen Mosfets schalten. Bauteile in dieser Größenordnung sind Standardware. Bei diesem Projekt kamen vier LTV-817C von LiteON Optoelectronics zum Einsatz.[22] Liegt nun also am Optokoppler eine Spannung (5V) vom Controller(ein Arduino) an, schließt sich der 12V-Stromkreis am Gate des Hochvolt-Transistors, was wiederum bewirkt dass Hochspannung über den Mosfet fliessen kann. Sobald die Spannung am Optokoppler nicht mehr anliegt oder zu gering ist, ist der 12V- Stromkreis wieder offen. Evtl. noch vorhandene Ladung kann über einen Pull-Down- Widerstand abfliessen.
Aufbau 29 3.3 Schaltplan Auf dem Schaltplan werden folgende Abkürzungen verwendet: • LS: Low-Side (massezugewandte Seite der H-Brücke) • HS: High-Side (ladungszugewandte Seite der H-Brücke) • PD: Pulldown-Widerstand (leitet Ladung von Gate ab) • HV: Hochvolt • OK: Optokoppler (schaltet 12V Gate-Spannung) • GND: Masse (negativ) • GND iso: isolierte Masse (separates Netzteil) • 5V, 12V: Spannungsversorgung (positiv) Abbildung 16 Schaltplan gesamt
Aufbau 30 3.4 Arduino Ein Arduino Uno R3 wird per USB2.0-Schnittstelle angesprochen und darüber auch mit Strom versorgt. Er nimmt Anweisungen des Computers entgegen anhand deren er die Ansteuerung der H-Brücke übernimmt. 3.4.1 Serial Schnittstelle Die Kommunikation läuft über die serielle Schnittstelle mit 9600 baud. Sobald der Arduino einen Verbindungsversuch erkennt, meldet er sich. Der Computer wird daraufhin einen Handshake versuchen. Klappt dieser, gilt der Arduino als verbunden und wartet auf Befehle. In der seriellen Kommunikation behält die Computer-Seite die Kontrolle. Steuerbefehle von Computer zum Mikrokontroller haben Priorität. Der Arduino sendet nur, wenn er dazu aufgefordert wird. Versuche, jedes Kommando mit einer Antwort bestätigen zu lassen, überforderte die Schnittstelle und resultierte in regelmäßigen Hardware-Resets des Unos. Der Computer sendet fortlaufend ein Lebenszeichen. Liegt die letzte dieser Nachrichten über 500 millisekunden in der Vergangenheit, wird ein timeout ausgelöst. Die Spannungsversorgung, sofern bestehend wird getrennt. So wird sichergestellt, dass bei einem Verbindungsabbruch maximal eine halbe Sekunde die Bremse aktiviert bleibt. Dies kommt auch der Sicherheit zugute. Im seriellen Protokoll wird die Versorgung der elektrostatischen Bremse über eine Frequenz in Hertz kodiert. Erhält der Arduino eine solche Nachricht aktualisiert er die letzte Frequenz auf die neue Hertz-Zahl. Liegt sie bei null, bedeutet das eine vollständig gelöste Bremse. 3.4.1.1 USB-Chip Für die Zuverlässigkeit der seriellen Verbindung ist es entscheidend, auf den USB-Chip des Arduinos zu achten. Der anfangs verwendete Arduino-Nano-Klon zeigte zahlreiche Probleme. Nachrichten gingen verloren oder wurden nur teilweise übertragen. Regelmäßig stürzte das Gerät ganz ab und war für mehrere Sekunden nicht erreichbar. Ursache war der verwendete CH340-IC, welcher oft bei preiswerten Modellen zum Einsatz kommen. Trotz zahlreicher Anleitungen, verschiedenster Treibersoftwareversionen und Beteuerungen der Hersteller, die Chips stünden ihrem Original in nichts nach, waren sie nicht zu gebrauchen.[35] Das Problem ist in diversen Foren bekannt, selbst von Problemen bei der Kommunikation zwischen Arduinos selben Fabrikates wird berichtet.[18] Abhilfe schaffte erst ein Original-Arduino Uno R3, bei dem der etwas teurere FT232-IC statt dem CH340 verbaut ist. 3.4.2 H-Brücken-Regelung Die Ausgänge der Pins 7 und 8 führen zum Schaltkreis der Phase 1 und 2 für die H-Brücke. Die Zuordnung ist dabei irrelevant, d.h. die Anschlüsse können auch vertauscht werden. An den beiden Phasen wird abwechselnd ein Steuersignal angelegt. Dabei gilt es, beim Wechsel eine Latenz zu beachten, während der beide ausgeschaltet bleiben. Die Dauer ergibt sich aus der Schaltlatenz der H-Brücke und wird in 3.2.1.3.2 mit 0.35 Mikrosekunden angegeben. Die kleinste programmierbare Verzögerung beträgt 1 Mikrosekunde und soll als Latenz verwendet werden. Liegt ein Befehl zum Schalten der Wechselspannung vor, errechnet sich die Dauer jeder Phase wie folgt
Sie können auch lesen