KONSTRUKTIONSÜBERLEGUNGEN ZUR UMWANDLUNG EINER DREHBEWEGUNG IN EINE LINEARE BEWEGUNG - Portescap
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
WHITEPAPER KONSTRUKTIONSÜBERLEGUNGEN ZUR UMWANDLUNG EINER DREHBEWEGUNG IN EINE LINEARE BEWEGUNG Einführung Ein Standard-Minielektromotor erzeugt eine Drehbewegung. In vielen Anwendungen bewegt sich die Last jedoch linear statt rotativ. Dies ist typischerweise bei medizinischen Pipetten und Spritzen, Mesotherapiegeräten und Bestückungsmaschinen für Industriemärkte und Flüssigkeitsregelventile der Fall. Ingenieure müssen daher ihr eigenes System entwickeln, um Drehbewegung in lineare Bewegung umzuwandeln. Der Schwerpunkt sollte hier auf der Entwicklung des Kernprodukts liegen. Die Auswahl des Miniaturmotors und das Design des Übertragungssystems sollten von Motion Spezialisten vorgenommen werden, damit wertvolle Entwicklungszeit eingespart werden kann. Im Folgenden werden die Möglichkeiten für die Umwandlung in lineare Bewegung genauer besprochen. Die Drehbewegung kann über ein auf der Motorwelle montiertes Spindel- und Muttersystem in lineare Bewegung umgewandelt werden. Es gibt dabei zwei Haupttypen von Spindel- und Muttersystemen: » Eine Kugelgewindespindel (siehe Abbildung 1) wirkt auf den Rollkontakt zwischen der Mutter und einer Spindel. Die Kugel wird entlang einer spiralförmigen Nut zurückgeführt. Aufgrund der Rollkomponenten weist diese Lösung sehr geringe Reibung auf, was einen hohen Wirkungsgrad (über 90 %) und hohe Belastbarkeit ermöglicht. » Eine Gewindespindel (siehe Abbildung 2) besteht aus einer Spindel (im Allgemeinen aus Edelstahl) und einer Mutter (im Allgemeinen aus Kunststoff). Beide Komponenten stehen in direktem Kontakt, wodurch mehr Reibung als bei der Kugelgewindespindel entsteht. Diese Option ist jedoch eine gute, wirtschaftliche Lösung, wenn Kosten eine wichtige Rolle spielen. Das Material der Mutter beeinflusst generell die Lebensdauer und die maximale Abbildung 1: Kugelgewindespindel Belastbarkeit der Baugruppe. Mit zwei vorgespannten Muttern kann das Axialspiel allerdings beseitigt werden. In der Regel gibt es zwei in Frage kommende Arten von linearen Lösungen: • Option 1: Die Gewindespindel ist direkt in den Motor integriert. • Option 2: Die Gewindespindel ist auf der Motorwelle montiert. Option 1: Motor mit integrierter Gewindespindel Standardmäßige Linearaktuatoren (oft als digitale Linearantriebe bzw. DLA bezeichnet) sind eine vollständig integrierte lineare Lösung, bei der ein Schrittmotor mit Becherstapel verwendet wird. Dies ist generell eine kostengünstige Lösung. Die Schritttechnologie hat zur Folge, dass der Motor ein Positionierungssystem für sich darstellt, sodass für die Steuerung keine Positionsrückführung erforderlich ist. Der DLA kann je nach gewünschter Auflösung in vollen Schritten, halben Schritten oder Mikroschritten betrieben werden. Ein weiterer Vorteil ist, dass der DLA aufgrund des Rastmoments des Motors seine Position bei abgeschalteter Abbildung 2: Gewindespindel Stromzufuhr beibehalten kann. ©2021 Portescap. Alle Rechte vorbehalten.

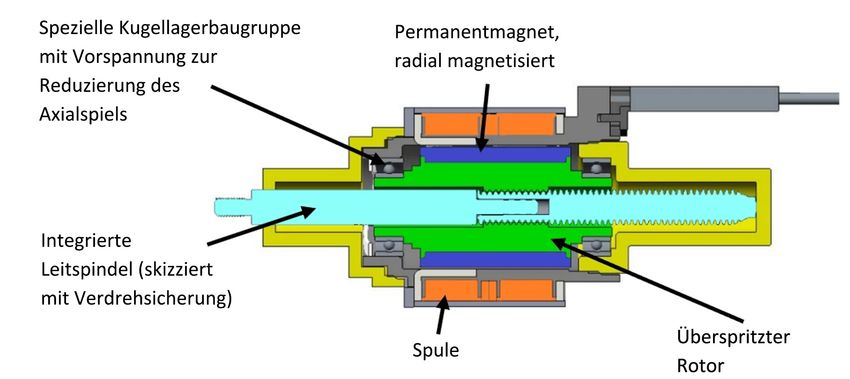
WHITEPAPER | Seite 2 von 10 Bei der linearen Übertragung ist in der Rotorbaugruppe (siehe Abbildung 3) die Mutter überspritzt mit einem speziellen Material, das die Reibung optimiert, was für eine effiziente Lösung und lange Lebensdauer sorgt. Einige Produkte verfügen sogar über eine spezielle Kugellagerbaugruppe, bei der die Kugellager mit einer Wellenscheibe vorgespannt sind, um das Axialspiel zu verringern (siehe Abbildung 3). Auf diese Weise werden die lineare Positionierungsgenauigkeit sowie die Wiederholbarkeit der Bewegung verbessert. Die Gewindespindel wird während der Bewegung aus- und eingefahren und kann auf Wunsch in dieselbe Ausgangsposition zurückgebracht werden. Abbildung 3: Beispiel eines Linearaktuators mit Becherstapel und ohne Axialspiel Wenn Sie nach der am besten geeigneten linearen Bewegungslösung suchen, sollten Sie auch einige Optionen in Erwägung ziehen, die allgemein als Standard für die Lösungsoptimierung verfügbar sind: » Hublänge » Steigung der Gewindespindel (in der Regel zwei oder drei Auswahlmöglichkeiten/Referenzen) » Spulentyp: bipolar oder unipolar » Nennspannung der Spule » Nennstrom » Unverlierbare Gewindespindel (integrierte Verdrehsicherung) oder nicht unverlierbare Gewindespindel (siehe Abbildung 4) » Verschiedene Gewindespitzen in metrischen und imperialen Maßen erhältlich Linearaktuatoren können sehr kostengünstig eine hohe Linearkraft und Zuverlässigkeit für Ihre Maschine bieten. ©2021 Portescap. Alle Rechte vorbehalten.

WHITEPAPER | Seite 3 von 10 Abbildung 4: Design mit und ohne Verdrehsicherung im Vergleich Option 2: Kundenspezifische Motorlösung Für Anwendungen, die hohe Leistung auf begrenztem Bauraum erfordern, wird empfohlen, eine anpassbare Lösung in Betracht zu ziehen. Kundenspezifische Lösungen werden normalerweise entweder mit einem Bürsten-Gleichstrommotor, einem bürstenlosen Gleichstrommotor oder einem Scheibenmagnet-Schrittmotor versehen. Diese Technologien bieten verschiedene Vorteile gegenüber Schrittmotoren mit Becherstapel. Beispielsweise empfehlen wir für Anwendungen mit hoher Beschleunigung die Verwendung eines Motors mit geringer Trägheit, z. B. eines Scheibenmagnet-Schrittmotors. Für hohe Leistung auf kleinem Bauraum ist möglicherweise eine Kombination aus bürstenlosem Gleichstrommotor, Getriebe und Gewindespindel die beste Lösung. Wenn ein hoher Wirkungsgrad erzielt werden soll, ist vermutlich ein kernloser Bürsten-Gleichstrommotor am besten geeignet. Dies gilt insbesondere, wenn es sich um eine batteriebetriebene Anwendung handelt. Einige Zubehörteile können auch an den Motoren montiert werden, z. B. ein Encoder für hochauflösende Positionsrückführung. Eine maßgeschneiderte Lösung bietet zudem Flexibilität bei der Auswahl der Gewindespindel. Das Forschungs- und Entwicklungsteam kann entscheiden, ob eine Kugelumlaufspindel oder eine normale Gewindespindel besser geeignet ist, unterschiedliche Steigungen vorschlagen, das Material anpassen und sogar die Abmessungen optimieren. Beim Entwurf einer motorisierten Baugruppe muss sowohl die von der Anwendung benötigte Leistung als auch die auf Motorebene erzeugte Leistung bekannt sein. Es gibt einige physikalische Beziehungen, die bei der Umwandlung der gewünschten Ausgangskraft und linearen Geschwindigkeit in das erforderliche Antriebs- und Drehmoment zum Tragen kommen. Im Folgenden sind einige Beispiele dafür aufgeführt, wie Sie die optimale Lösung für die für Ihre Anwendung erforderliche Leistung ermitteln können. Beispiel 1: Digitaler Linearantrieb Anwendungsbeschreibung Ein Team entwickelt ein medizinisches Laborgerät, das eine kleine Menge Flüssigkeit in Reagenzgläsern bewegt. Einer der Motoren steuert eine Mehrkanalpipette. Die Motorkomponente ist auf einen maximalen Durchmesser von 20 mm begrenzt. Gute Wiederholbarkeit und hohe Genauigkeit sind wichtig, um bei jedem Vorgang konstant die gleiche Flüssigkeitsmenge bereitzustellen. Der Arbeitsprozess kann in zwei Hauptschritte unterteilt werden: Î Schritt 1: Pipetten in einem Schritt innerhalb von 4 Sekunden füllen. Zurückgelegter Weg der Pipette: 50 mm in 4 Sek. Geschwindigkeit = 12,5 mm/Sek Kraft: 20 N bei viskoser Flüssigkeit Î Schritt 2: Pipetten entleeren. Der Inhalt der Pipetten wird in winzige Mengen und auf mehrere Reagenzgläser aufgeteilt. Zurückgelegter Weg: Der Weg der Pipette muss in 30 Teilschritte unterteilt werden können, d. h. 50 mm / 30 = 1,6 mm Kraft: 15 N ©2021 Portescap. Alle Rechte vorbehalten.

WHITEPAPER | Seite 4 von 10 Lösung Digitale Linearantriebe sind für gewöhnlich eine gute Lösung für diesen Gerätetyp. Gründe hierfür sind unter anderem: » Die Lösung ist normalerweise als Standard verfügbar, es ist also keine Entwicklung erforderlich. » Aufgrund der Schritttechnologie ist es einfach, die Flüssigkeitsabgabe in Teilvolumina zu unterteilen. » Dank der vorgespannten Kugellagerbaugruppe gibt es im DLA kein Axialspiel, was eine gute Wiederholbarkeit zur Folge hat. Zur Auswahl eines Motors empfehlen wir den folgenden Vorgang. Für das Beispiel wird der von Portescap angebotene Motor 20DBM genutzt (siehe Abbildung 5): • Abmessungen: Lösung mit Durchmesser > 20 mm entfernen 1 • Hublänge: Der zurückgelegte Weg beträgt 50 mm, die minimale Hublänge beträgt also 50 mm. Die unverlierbare Version kann ausgeschlossen werden, da die Hublänge kleiner als 50 mm ist. 2 • Leistung: Überprüfen Sie, ob der Motor unter der erforderlichen Kraft arbeiten kann. 3 • Berechnen Sie die Frequenz, die erforderlich ist, um die angestrebte lineare Geschwindigkeit zu erreichen. Die Frequenz hängt von der Steigung der Gewindespindel ab. Siehe Spalten 3 und 5 in Tabelle 1. 4 Beziehen Sie sich auf die Anfangskraft im Schaubild, wenn Sie die Spindelsteigung auswählen. Siehe Spalte 4 in Tabelle 1. 5 • Spule: Es ist wichtig, eine an die Stromversorgung angepasste Spule auszuwählen. Eine Spule mit einer geringen Anzahl von Umläufen hat einen geringen Widerstand und ist für einen Stromversorgungstyp mit hoher Stromstärke und niedriger Spannung geeignet. Eine Spule mit einer hohen Anzahl von Umläufen hat einen hohen Widerstand und ist für einen Stromversorgungstyp mit niedriger Stromstärke und hoher Spannung geeignet. 6 1 2 3 4 5 6 Spindel- Frequenz zum Erreichen Max. Kraft Anzahl der Schritte Anmerkungen typ Steigung für die einer Drehzahl von bei Nennstrom bei 1,5 Nennstrom verfügbar, Flüssigkeitsabgabe 12,5 mm/Sek. (PPS) und einer und einer linearer Weg Geschwindigkeit Geschwindigkeit in Teilvolumen lineare Abtriebsdrehzahl pro Schritt (12,5 mm/s) von 12,5 mm/s von 12,5 mm/s (PPS) (mm) Unterschrittweg (1,6 mm) linearer Weg pro Schritt (N) (N) linearer Weg pro Schritt 05 Nicht in der Grafik, Frequenz zu 126 Aufgrund der geringen hoch Steigung kann die Höchstgeschwindigkeit 0,0127 984 nicht erreicht werden 10 26 N 40 N 62 Diese Geschwindigkeit und 0,0254 492 Kraft sind erreichbar. 20 18 N 25 N 31 Bei Nennstrom kann der Motor nicht genügend Kraft bereitstellen. Wenn der Strom 1,5 mal höher als der Nennwert ist, kann die Kraft erreicht werden, aber es muss auf Überhitzung geachtet 0,0508 246 werden. Tabelle 1. Auswahl der 20DBM-Spindelsteigung ©2021 Portescap. Alle Rechte vorbehalten.
WHITEPAPER | Seite 5 von 10 Digitaler Linear Aktuator 20DBM-L 1 Ø 20 mm • RoHS-konform • 50 N 3 33,27±0,5 0,64 [0,0252] SQ. PIN [1,310±0,020] 17,02 [0,670] MAX (4X) REF 26,16±0,13 5,66±0,05 [0,223±0,002] 13,46 [0,530] MAX [1,030±0,005] 3,3±0,05 [0,130±0,002] 'A' 11,43±0,13 'B' 6,43±0,25 [0,253±0,010] 1,0±0,05 [0,0394±0,0020] [0,450±0,005] PIN 1 Ø3,56 [Ø0,140] REF 12,37±0,13 [0,487±0,005] REF 2,54 [0,100] PITCH (3X) ANSICHT 'A' 3,48 [0,137] REF M2 X 0,4-6g Ø14,35±0,05 1,22 [0,048] REF (ANDERE EINHEITLICHE [Ø0,565±0,002] Ø20,5 [Ø0,807] MAX Ø3,66±0,05 ANDMETRISCHE GEWINDE 5,11 [0,201] REF VERFÜGBAR) Ø16,26±0,05 23,62 [0,930] MAX [Ø0,144±0,002] [Ø0,640±0,002] 2,31 [0,09] REF 3,81±0,13 [0,150±0,005] 76,2±0,76 [3,00±0,03] DETAIL 'B' Maße in mm [Zoll] 6 20DBMXX••••••-K Elektrische Daten Einheit D2B Bipolar D1B Bipolar D3B Bipolar D4B Bipolar 1 Betriebsspannung 12 5 2,9 1,4 VDC 2 Widerstand pro Phase, ± 10 % 100,5 17,5 5,7 1,4 Ohms 3 Induktivität pro Phase, Typ 45,0 7,0 2,4 0,6 mH 4 Nennstrom pro Phase, 1 Phase EIN 0,17 0,41 0,71 1,41 A 5 Spannungsversorgung 2,9 2,9 2,9 2,9 W Allgemeine Daten XX Linearer Weg pro Schritt 05 bei 0,0005 Zoll (0,0127 mm) 50 (180) N (oz) 6 Min. Haltekraft bei Nennstrom 10 bei 0,001 Zoll (0,0254 mm) 35 (126) N (oz) 20 bei 0,002 Zoll (0,0508 mm) 4 22 (79) N (oz) 05 bei 0,0005 Zoll (0,0127 mm) 50 (180) N (oz) 7 Min. Haltekraft (stromlos) 10 bei 0,001 Zoll (0,0254 mm) 13,9 (50) N (oz) 20 bei 0,002 Zoll (0,0508 mm) 5,5 (20) N (oz) 8 Hublänge, Typ 50 (1,97) mm (in) 2 9 Lineare Verfahrgenauigkeit ± 1 Schritt 10 Schritte pro Umdrehung 48 11 Umgebungstemperaturbereich (in Betrieb) -20 bis +70 (-4 bis +158) °C (°F) 12 Max. Wicklungstemperatur 130 (266) °C (°F) 13 Kugellagertyp Kugellager 14 Isolationswiderstand bei 500 VDC 20 Mohms 15 Prüfspannung 650 für 2 Sekunden VAC 16 Gewicht 35 (1,23) g (oz) 17 Kabel Hinweise: 1. Alle Motordaten bei 20 °C (sofern nicht anders spezifiziert) – 2. Spannung mit Spannungstreiber (Indikator R•I) BIPOLARE SPULE gelb ROT GRAU GELB SCHWARZ PIN-Nr. SPULE KABEL Ausfahren + - + - 1 Frontstart Gelb schwarz + - - + 2 Frontpartie Schwarz - + - + Einfahren 3 Heck Grau - + + - 4 Heckstart Rot 5 + - + - grau rot VON ABTRIEBSWELLE AUS BETRACHTET Lineare Kraft-Geschwindigkeits-Kurven (Pull-In) Lineare Kraft-Geschwindigkeits-Kurven (Pull-In) Mikroschritt (8/Vollschritt), PWM, 1x Nennstrom Mikroschritte (8/Vollschritt), PWM, 1x Nennstrom Mit 5-V-Motor und 24-V-Stromversorgung erstellte Kurven Mit 5-V-Motor und 24-V-Stromversorgung erstellte Kurven 45,0 70,0 40,0 60,0 35,0 50,0 Kraft (N) 30,0 Kraft (N) 25,0 40,0 20,0 30,0 15,0 20,0 10,0 10,0 5,0 0,0 0,0 0 50 100 150 200 250 300 350 400 450 500 550 0 50 100 150 200 250 300 350 400 450 500 550 Drehzahl (Vollschritt/s) Drehzahl (Vollschritt/s) 20DBM05DXB-L 20DBM10DXB-L 20DBM20DXB-L 20DBM05DXB-L 20DBM10DXB-L 20DBM20DXB-L 154 V012021 • © 2020 Portescap. Änderungen der technischen Daten vorbehalten. Abbildung 5: Auswahlverfahren für Linearaktuatoren » Unter Berücksichtigung der Parameter und Leistungen im obigen Beispiel wäre der Motor mit der Spindel 10 eine gute Option. ©2021 Portescap. Alle Rechte vorbehalten.
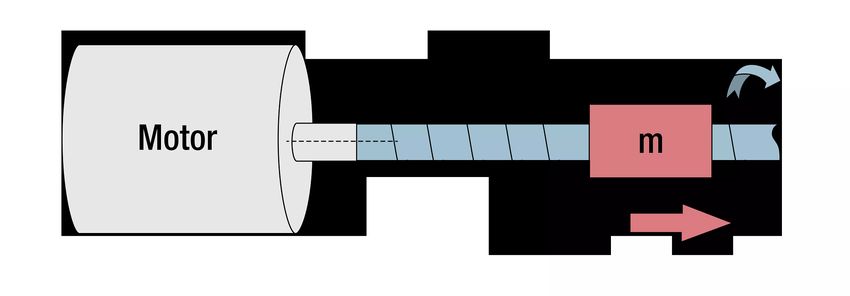
WHITEPAPER | Seite 6 von 10 Beispiel 2: Kundenspezifische Motorlösung Anwendungsbeschreibung Ein anderes Ingenieurteam entwickelt derzeit ein medizinisches Gerät, das während einer Operation von einem Arzt verwendet wird. Es gelten die folgenden Anforderungen: Das Werkzeug wird von einem Arzt verwendet und soll batteriebetrieben sein, um für bessere Ergonomie zu sorgen. Der Ingenieur kann nur eine Lösung mit einem maximalen Durchmesser von 13 mm unterbringen und das Werkzeug muss so optimiert werden, dass es einen guten Wirkungsgrad erzielt. Die typischen Leistungsanforderungen sind wie folgt (siehe Tabelle 2): Kraft (N) 100 Geschwindigkeit (mm/s) 7 Erforderliche mechanische Kraft (W) 0,7 Tabelle 2: Anschlusswerte Leistungsberechnung Da die Lösung batteriebetrieben ist, eignet sich die Technologie des kernlosen Bürsten-Gleichstrommotors gut, um einen hohen Wirkungsgrad zu erreichen. Die vom Motor angeforderte Leistung kann geschätzt werden, indem ein Getriebewirkungsgrad von 75 % und ein Gewindespindelwirkungsgrad von 50 % angenommen werden, was eine Leistung von 1,87 W ergibt. ∗ 100 ∗ 0,007 = = = 1,87 Steigung ∗ 0,75 ∗ 0,5 Durch Berechnung der geschätzten Leistung kann die typische Größe des Motors ermittelt werden. In diesem Beispiel kann bestätigt werden, dass ein Motor mit kleinem Durchmesser die Aufgabe bewältigen kann. Umwandlung von linearer Geschwindigkeit/Kraft in Drehzahl/Drehmoment Da der Motor eine Drehbewegung erzeugt, müssen wir die lineare Geschwindigkeit in Umdrehungen und die Kraft in ein Drehmoment umwandeln. Die Umrechnung hängt von der Gewindespindel ab, die durch ihre Steigung definiert wird. Physikalische Beziehungen Wenn sich die Schraube (auf der Welle montiert) um eine Umdrehung (2 π) dreht, bewegt sich die Mutter linear um einen Weg, welcher der Steigung entspricht (siehe Abbildung 6). Abbildung 6: Motor und Gewindespindel ©2021 Portescap. Alle Rechte vorbehalten.
WHITEPAPER | Seite 7 von 10 Folglich besteht die folgende Beziehung, die es ermöglicht, die lineare Geschwindigkeit in Umdrehungsgeschwindigkeit umzuwandeln: P: Steigung (mm) ∗ η: Wirkungsgrad der Gewindespindel = T: Drehmoment: (mNm) : Drehzahl: (Rad/s) N (U/min) v : Lineare Geschwindigkeit: (m/s) F : Lineare Kraft: (N) Wenn wir uns das Leistungsverhältnis ansehen, können wir das Verhältnis von Kraft und Drehmoment ableiten: ∗ = ∗ Die physikalische Umrechnungsformel kann auf das Beispiel angewendet werden. Da das Drehmoment und die Drehzahl von der Gewindespindel abhängen, können wir zwei verschiedene Steigungen für die Berechnung nutzen, um die Auswirkungen der Steigungsauswahl nachzuvollziehen. Hinweis: Die Wahl der Gewindespindel wirkt sich auf den Wirkungsgrad aus, da der Wirkungsgrad mit der Reibung des Materials und dem Spindelwinkel zusammenhängt. Die vorherigen Beziehungen werden nun auf das Beispiel angewendet (siehe Tabelle 3). Gewindespindel 1 Gewindespindel 2 Steigung (mm) Wirkungsgrad (%) Steigung (mm) Wirkungsgrad (%) 2 0,4 5 0,64 Drehzahl ∗ ∗ ∗ = = R = = = N = 210 U/min N = 84 U/min Drehmoment ∗ ∗ ∗ = = = ∗ , ∗ , ∗ Steigung 79,6 mNm 124,3 mNm Motorleistung = ∗ P = 22 * 79,6 = 1,7 W P = 8,7 * 124,3 = 1,1 W Tabelle 3: Berechnung von linearer Drehzahl und Drehmoment in Abhängigkeit von der Gewindespindel Eine geringere Steigung erfordert eine höhere Drehzahl und ein geringeres Drehmoment als die größere Steigung. Im Allgemeinen wird bei geringerer Steigung aufgrund des geringeren Wirkungsgrads auch mehr Leistung benötigt. ©2021 Portescap. Alle Rechte vorbehalten.
WHITEPAPER | Seite 8 von 10 Getriebeauswahl Die Getriebeauswahl hängt vom Abtriebsdrehmoment und von der Antriebsdrehzahl ab. Gemäß dem Portescap-Katalog ist das Getriebe R13 für beide Spindeln geeignet. Dieses Getriebe hat ein maximales Abtriebsdrehmoment von 0,25 Nm (> berechnetes Drehmoment). Die maximale Antriebsdrehzahl dieses Getriebes beträgt 7500 U/min. Übersetzungsauswahl Anhand der maximal empfohlenen Antriebsdrehzahl des Getriebes kann festgelegt werden, welche maximale Übersetzung gewählt werden soll. Zur Definition der maximalen Übersetzung wird das maximale Antriebsdrehmoment durch das Abtriebsdrehmoment geteilt und das Ergebnis wird mit der verfügbaren Übersetzung verglichen (siehe Tabelle 4). Gewindespindel 1 (Steigung 2 mm, η = 40 %) Gewindespindel 2 (Steigung 5 mm, η = 64 %) Betriebsdrehzahl 210 U/min 84 U/min Zuvor berechnet Maximale Antriebsdrehzahl des R13-Getriebes (siehe 7500 U/min 7500 U/min Datenblatt) Maximale theoretische Übersetzung 7500 7500 max. Antriebsdrehzahl 210 = 35,7 84 = 89,2 Betriebsdrehzahl Nächste verfügbare Übersetzung* Getriebe R13 Übersetzung 30,2 Getriebe R13 Übersetzung 88 (Wirkungsgrad 75 %) (Wirkungsgrad 65 %) Tabelle 4. Auswahl der Übersetzung im Getriebe *Im Allgemeinen wird die nächstgelegene und kleinste verfügbare Übersetzung gewählt, um mit einem Antriebsdrehmoment zu arbeiten, das unter dem empfohlenen maximalen Antriebsdrehmoment liegt. Motorauswahl Bevor der Motor ausgewählt wird, muss das Antriebsdrehmoment des Getriebes berechnet werden. Da es sich um eine durchgehende Anwendung handelt, muss der Motor ein maximales Dauerdrehmoment haben, das höher ist als das Antriebsdrehmoment des Getriebes der Anwendung (siehe Tabelle 5). Gewindespindel 1 Gewindespindel 2 (Steigung 2 mm, η = 40 %) (Steigung 5 mm, η = 64 %) + + Getriebe R13 Übersetzung 30,2 Getriebe R13 Übersetzung 88 Betriebsdrehmoment /Abtriebsdrehmoment des Getriebes 79,6 mNm 124,3 mNm Zuvor berechnet Antriebsdrehmoment des Getriebes / Betriebsdrehmoment des Motors (mNm) 79,6 124,3 30,2 ∗ 0.75 = 3,5 mNm 88 ∗ 0,88 =2,1 mNm Betriebsdrehmoment Getriebeübersetzung * Getriebewirkungsgrad Tabelle 5. Berechnung des Drehmoments auf Motorebene Für beide Spindeln können wir den Motor 12G88 mit einem maximalen Dauerdrehmoment von 3,5 mNm verwenden. ©2021 Portescap. Alle Rechte vorbehalten.
WHITEPAPER | Seite 9 von 10 Lösungsauswahl Die elektrische Leistung, der Wirkungsgrad und die Lösungsdimension können nun für die einzelnen Lösungen berechnet werden (siehe Tabelle 6). Der Motor 12G88 215E hat die folgenden Spezifikationen: » Drehmomentkonstante k = 4,9 mNm/A » Widerstand R = 3,2 Ω Gewindespindel 1 Gewindespindel 2 (Steigung 2 mm, η = 40 %) (Steigung 5 mm, η = 64 %) + + Getriebe R13 Getriebe R13 Übersetzung 30,2 Übersetzung 88 + + Motor 12G88 Motor 12G88 Arbeitsdrehmoment des Motors 3,5 mNm 2,1 mNm Stromaufnahme Arbeitsdrehmoment 0,7 A 0,4 A Drehmomentkonstante k Betriebsdrehzahl des Motors Arbeitsdrehmoment des Getriebes * 6342 U/min 7392 U/min Übersetzung Spannung 5,5 V 5,1 V U = R*I + k*ω Elektrische Leistung 3,85 W 2,04 W Spannung * Stromaufnahme In der Anwendung benötigte mechanische Leistung 0,7 W 0,7 W Lineare Geschwindigkeit * Kraft Gesamteffizienz Mechanische Leistung 18 % 30 % Elektrische Leistung Länge (mm) 46,8 mm 50,9 mm Gewicht (g) 24 g 27 g Tabelle 6. Leistungsberechnungen für die Lösungen Vom technischen Standpunkt aus gesehen sind beide Lösungen möglich, aber abhängig von den Anforderungen der Anwendung ist entweder Option 1 oder Option 2 besser geeignet. Wenn beispielsweise die Batterielebensdauer im Vergleich zum Lösungspaket priorisiert werden soll, ist vermutlich Option 2 die beste Wahl. In der Tat beträgt der Gesamtwirkungsgrad hier 30 %, während bei Option 1 nur 18 % erreicht werden. Der Nachteil von Option 2 ist dessen Größe, da Getriebe 2 eine Stufe mehr als Option 1 aufweist, was diese Lösung 3 g schwerer und 3,1 mm länger macht. ©2021 Portescap. Alle Rechte vorbehalten.
WHITEPAPER | Seite 10 von 10 Schlussfolgerung: Bei linearen Anwendungen können Motorlieferanten das Entwicklungsteam unterstützen, indem sie standardmäßige Linearmotoren anbieten oder eine lineare, kundenspezifische Motorlösung entwickeln. Für beide Parteien (Motorlieferant und Anwendungsentwickler) ist es wichtig, die technischen Anforderungen im Gerät, aber auch auf Motorebene zu definieren. Bei jeder Entwicklung ist es unabdingbar, die Anforderungen des Projekts vollständig zu verstehen, um den besten Kompromiss zwischen technischen und kommerziellen Anforderungen zu finden. Clémence Muron Anwendungstechniker WEITERE INFORMATIONEN Rue Jardinière 157 CH 2301 La Chaux-de-Fonds Schweiz Telefon: +41 32 925 62 40 Fax: +41 32 925 62 88 sales.europe@portescap.com www.portescap.com WENDEN SIE SICH AN EINEN INGENIEUR: https://www.portescap.com/de-de/kontaktieren-sie-uns ©2021 Portescap. Alle Rechte vorbehalten. 0209V052021ger
Sie können auch lesen