Auswirkungen des Sonnenwinds auf Pulsar Timing Messungen - Fakultät für Physik
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Universität Bielefeld
Fakultät für Physik
Bachelorarbeit
im Studiengang Physik
zum Thema:
Auswirkungen des Sonnenwinds auf
Pulsar Timing Messungen
vorgelegt von
Benjamin Hack
Matrikel-Nr: 2833820
Anschrift: Prenzlauer Str. 18
33619 Bielefeld
1. Prüfer Prof. Dr. Joris Verbiest
2. Prüfer Dr. Jörn Künsemöller
Bielefeld, im August, 2021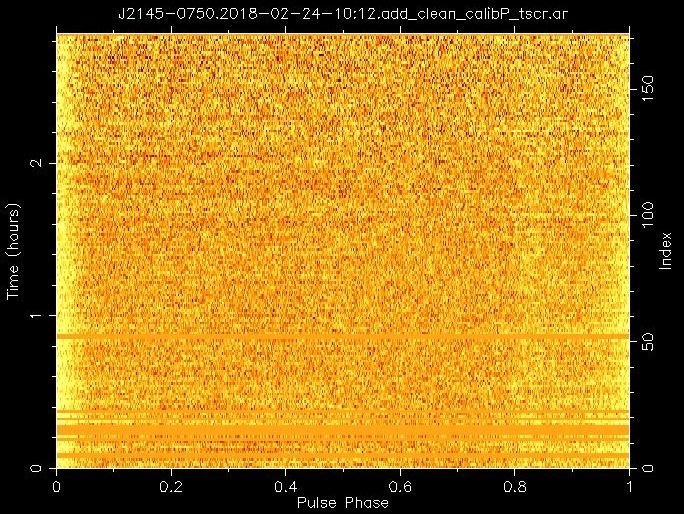

Zusammenfassung
In dieser Arbeit werden die Effekte des Sonnenwinds, insbesondere der daraus resultie-
renden Änderung in der Ladungsdichte und des Magnetfelds, auf Pulsar Timing Messun-
gen am Beispiel der Pulsare PSR J1136+1551 und PSR J2145−0750 untersucht. Dazu
werden Messdaten der sechs deutschen LOFAR-Stationen verwendet und aus ihnen das
Dispersionsmaß und das Rotationsmaß bestimmt. Zusätzlich werden zwei Modelle zur
Korrektur des Rotationsmaßes, die aufgrund von Effekten der Ionosphäre auf die Mes-
sungen notwendig sind, verglichen und untersucht.
Zu Beginn der Arbeit werden Pulsare, ihre Struktur und ihre Entstehung genauer be-
trachtet. Anschließend wird die Auswertung der Messwerte theoretisch behandelt. Ein
weiterer wichtiger Bestandteil ist die Wechselwirkung der von dem Pulsar ausgesendeten
Radiopulse mit dem interstellaren Medium und mit der Heliosphäre. Die Funktionsweise
der verwendeten Teleskope wird ebenfalls beleuchtet. Im zweiten Kapitel wird auf die
verwendete Methode und die dazu verwendeten Programme eingegangen, die notwen-
dig sind, um die Messwerte aufzubereiten und anschließend das Dispersions- und das
Rotationsmaß zu berechnen. Die Auswertung findet in Kapitel drei statt. Hier können
vor allem die Effekte des Sonnenwinds auf Messungen des Dispersionsmaßes beobachtet
werden. Auch bei Messungen des Rotationsmaßes können Peaks zur Zeit der Sonnenkon-
junktion beobachtet werden. Jedoch ist hier nicht ganz klar, ob diese Änderungen auf
Effekte der Ionosphäre oder der Heliosphäre zurückzuführen sind, da die ionosphärischen
Korrekturen unzureichend genau sind.
3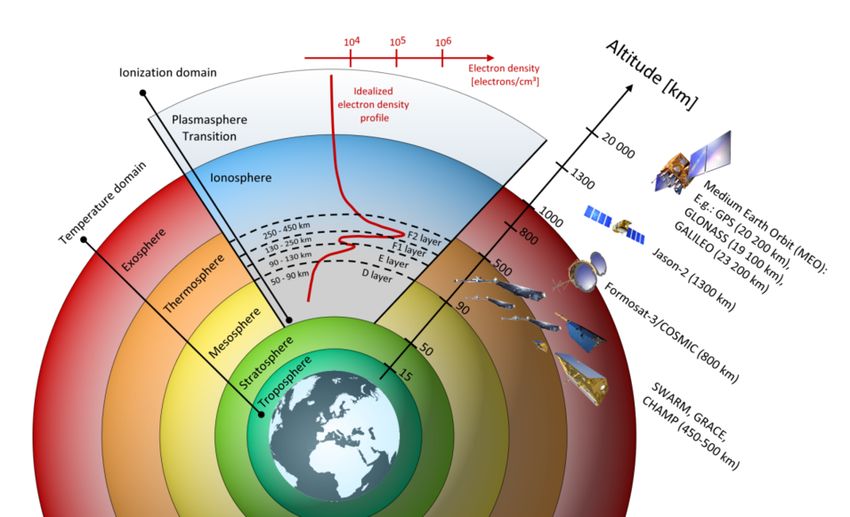
Inhaltsverzeichnis
1. Einführung 1
1.1. Pulsare . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.1. Entstehung von Pulsaren . . . . . . . . . . . . . . . . . . . . . . . 1
1.1.2. Emission von Radiostrahlung . . . . . . . . . . . . . . . . . . . . 2
1.1.3. Pulsare und Millisekundenpulsare . . . . . . . . . . . . . . . . . . 3
1.2. Pulsprofile . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.3. Pulsar Timing . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.4. Messverfahren und Tempo2 . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5. Wechselwirkungen mit dem interstellarem Medium . . . . . . . . . . . . 8
1.5.1. Dispersion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.5.2. Faraday-Rotation . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
1.5.3. Streuung und Szintillation . . . . . . . . . . . . . . . . . . . . . . 12
1.6. Die Heliosphäre . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.7. Low Frequency Array . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2. Datenverarbeitung 16
2.1. Pulsar Archive Manipulator . . . . . . . . . . . . . . . . . . . . . . . . . 16
2.2. Entfernen von Radiofrequenz-Interferenzen . . . . . . . . . . . . . . . . . 16
2.3. Erstellen eines Templates . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.1. Additive Verbesserung des S/N . . . . . . . . . . . . . . . . . . . 18
2.3.2. Pulsar Archive Analytic Standart Maker . . . . . . . . . . . . . . 20
2.4. Timing und Erstellen einer Ephemeris . . . . . . . . . . . . . . . . . . . 20
2.5. Messung des Dispersions- und Rotationsmaßes . . . . . . . . . . . . . . . 22
2.5.1. Anpassen der Frequenzkanäle der Templates . . . . . . . . . . . . 22
2.5.2. Berechnung des Dispersionsmaßes . . . . . . . . . . . . . . . . . . 22
2.5.3. Berechnung des Rotationsmaßes . . . . . . . . . . . . . . . . . . . 23
2.5.4. Ionosphärische Korrekturen des Rotationsmaßes . . . . . . . . . . 24
3. Analyse 26
3.1. DM-Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2. RM-Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4. Fazit 33
A. Zusätzliche Darstellungen 36
1. Einführung
Die in diesem Kapitel beschriebenen Zusammenhänge wurden, wenn nicht anders ge-
nannt, dem von Lorimer und Kramer 2012 veröffentlichten Handbook of Pulsar Astro-
nomy entnommen.
1.1. Pulsare
Als Pulsar werden sehr schnell rotierende Neutronensterne bezeichnet, die ein sehr star-
kes Magnetfeld aufweisen. Pulsare haben eine Masse von einer bis zwei Sonnenmassen
(M ) und einen Durchmesser von ungefähr 20km. Diese sehr dichten Himmelskörper
emittieren an ihren magnetischen Polen Radiostrahlen, die das Universum wie das Licht
eines Leuchtturms durchfahren. Pulsare wurden 1967 von Jocelyn Bell-Burnell und Ant-
ony Hewish in Cambridge entdeckt. Seitdem wurden über 2500 weitere Pulsare entdeckt,
welche in dem Onlinepulsarkatalog von Manchester et al. (2005a) aufgelistet sind.
1.1.1. Entstehung von Pulsaren
Ist der Brennstoff eines massereichen Sterns fast aufgebraucht, so tritt er in das Endsta-
dium seiner Lebenszeit ein. Diese endet in einer Explosion, welche Supernova genannt
wird. Abhängig von der Ausgangsmasse m des Sterns entsteht nach dem Kollaps ent-
weder ein schwarzes Loch, dass nach der Explosion eine Masse von m > 3M hat, oder
ein Neutronenstern, dessen Masse nach der Explosion zwischen 1, 44M und 3M liegt.
Da der massive Gravitationsdruck nach der Supernova nicht mehr durch den energeti-
schen Druck der gestoppten Kernfusion ausgeglichen werden kann, wird die Masse des
Neutronensterns sehr stark verdichtet. Dies führt aufgrund der Drehimpulserhaltung
dazu, dass die Rotationsgeschwindigkeit des Neutronenstern stark zunimmt. (Burke &
Graham-Smith, 2010)
Ein typisches Modell eines Neutronensterns besteht aus vier Schichten. Die äußerste
Schicht ist eine kristalline Kruste, die aus Eisenkernen bei einer Diche von ungefähr
106 g/cm3 besteht. Die Dichte nimmt sehr stark zu, je näher sich dem Kern angenähert
wird. So kommt es, dass bei einer Dichte von ungefähr 4 · 1011 g/cm3 Elektronen und
Protonen zu Neutronen kombiniert werden und somit Kerne mit unnatürlich hohen
Neutronenzahlen gebildet werden:
p + e− → n + νe .
Die meisten dieser Kerne sind instabil und so kommt es, dass freie Neutronen existieren.
Diese freien Neutronen formen ein Suprafluid mit einer Dichte von ungefähr 2·1014 g/cm3 ,
welches sich unabhängig von der äußeren Kruste bewegen kann. Im Kern sind Neutronen
mit Protonen und Elektronen im Gleichgewicht, wobei das Gleichgewicht jedoch stark
auf der Seite der Neutronen liegt. Über den Kern wird vermutet, dass er supraleitend
und suprafluid sei.
Das äußere Magnetfeld eines Neutronensterns ist stark dipolar. Im inneren des Kerns
ist es aufgrund der Suprafluidität und Supraleitung sehr viel komplexer. (Burke &
Graham-Smith, 2010)
1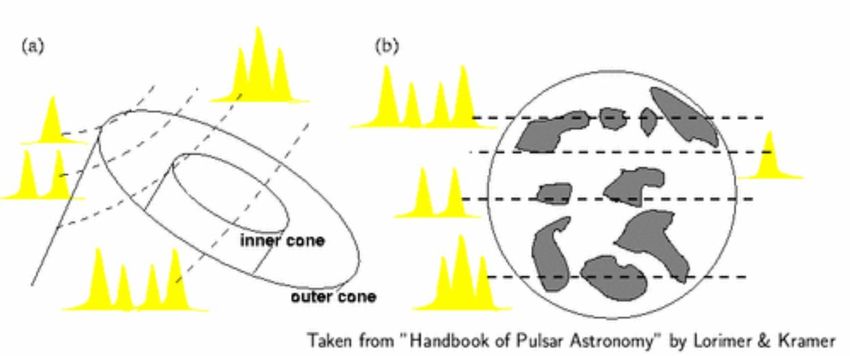
1.1.2. Emission von Radiostrahlung
Die Magnetfeldlinien eines Pulsars rotieren mit der selben Winkelgeschwindigkeit wie
die Kruste des Pulsars selbst. So kommt es, dass zwischen offenen und geschlossenen
Magnetfeldlinien unterschieden werden kann. Die offenen Magnetfeldlinen entstehen da-
durch, dass die Bahngeschwindigkeiten der entsprechenden Feldlinien um den Pulsar
herum ab einem gewissen Abstand zur Rotationsachse schneller werden als die Licht-
geschwindigkeit, wodurch die Feldlinien aufgespalten werden. Die äußerste geschlossene
Feldlinie definiert dabei den so genannten light cylinder (dt. Lichtzylinder).
Abb. 1: Schematische Abbildung des rotierenden Neutronensterns im Rotations- bzw. Licht-
zylinder. Die Abbildung wurde Lorimer & Kramer, 2012, Kapitel 3 entnommen.
In der einfachen Betrachtung fließt Plasma unter Emission von Photonen von der
Oberfläche des Pulsars entlang der offenen Feldlinien. Die Photonen werden dabei tan-
gential zu den offenen Feldlinien emittiert. Daher haben Pulsare, dessen Emissionspunkt
niedriger liegt einen engeren Emissionskegel als Pulsare mit einem höher gelegenem Emis-
sionspunkt. Die auf der Erde gemessene Pulsweite hängt neben dem Öffnungswinkel des
Emissionskegels unter anderem davon ab, wie die sogenannte line of sight (LoS, dt.
Sichtlinie), welche die direkte Verbindung zwischen Beobachter und Pulsar darstellt,
den Emissionskegel schneidet. (Radhakrishnan et al. (1969), Smith (1969))
In Abbildung 2 ist die Geometrie des Emissionskegels zu erkennen. Auf der rechten
Seite sind die Koordinaten zu erkennen. Auf der linken Seite ist vor allem der Schnitt der
LoS durch den Emissionskegel zu sehen, dabei fällt auf, dass die Linie, die dabei gezogen
2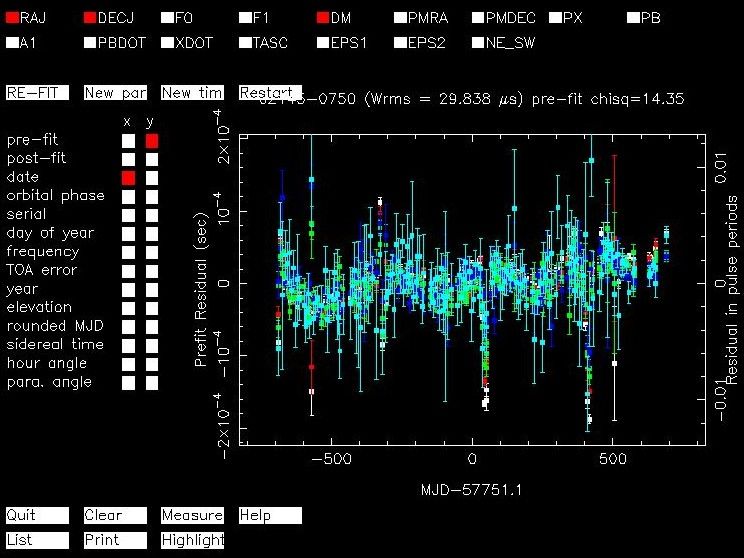
Abb. 2: Geometrie des Emissionskegels eines Pulsars. Die magnetische Achse und damit auch
der Emissionskegel mit Öffnungswinkel ρ sind um α zur Rotationsachse gekippt. Die
Abbildung wurde Lorimer & Kramer, 2012, Kapitel 3 entnommen.
wird (vgl. Abb. 2(a) line of sight trajectory) gekrümmt ist. Der Einschlagswinkel β ist ein
Maß dafür, wie nah die LoS an die magnetische Achse kommt. Die Mitte des gemessenen
Pulses wird erwartet, wenn sich die Rotationsachse, die magnetische Achse und die LoS
auf einer Ebene befinden. Diese Ebene wird Referenzebene genannt.
1.1.3. Pulsare und Millisekundenpulsare
Je nach Periodendauer P werden Pulsare in normale Pulsare und Millisekundenpul-
sare unterteilt. Aufgrund der permanenten Abstrahlung von Energie erfahren Pulsare
einen spin-down Ṗ , der dafür sorgt, dass sich die Rotationsfrequenz verringert und die
Periodendauer erhöht wird. Normale Pulsare haben eine Periodendauer von ungefähr
P ∼ 0, 5s und erfahren einen spin-down von circa Ṗ ∼ 10−15 . Millisekundenpulsare hin-
gegen rotieren mit einer Periodendauer von etwa P ∼ 3ms mit einem spin-down von
ungefähr Ṗ ∼ 10−20 .
Unabhängig von den Rotationseigenschaften ist auffällig, dass annähernd 80 Prozent
der Millisekundenpulsare in einem Doppelsternsystem vorkommen. (Kramer et al., 1998)
Dahingegen sind es bei den langsameren Pulsaren nur ein Prozent. Dieses Phänomen
lässt sich dadurch erklären, dass die meisten Pulsare aus Doppelsternsystemen entste-
hen. Explodiert der erste dieser Sterne in einer Supernova, so kann es sein, dass er von
seinem ursprünglichen Partnerstern getrennt wird. In diesem Fall entsteht ein normaler
Pulsar. Werden die Himmelskörper jedoch nicht durch die Explosion getrennt, so ent-
steht zunächst auch ein normaler Pulsar. Der so entstandene Pulsar mit Begleiter kann
Masse von seinem begleitenden Stern anziehen, wenn dieser sich zu einem roten Riesen
aufbläht. Dabei wird die potentielle Energie der angezogenen Masse in Rotationsenergie
umgewandelt und der Neutronenstern erfährt ein spin up. Die Periodendauer nimmt also
ab und es entsteht ein Millisekundenpulsar. (Johnston et al. (1992), Radhakrishnan &
Shukre (1985))
3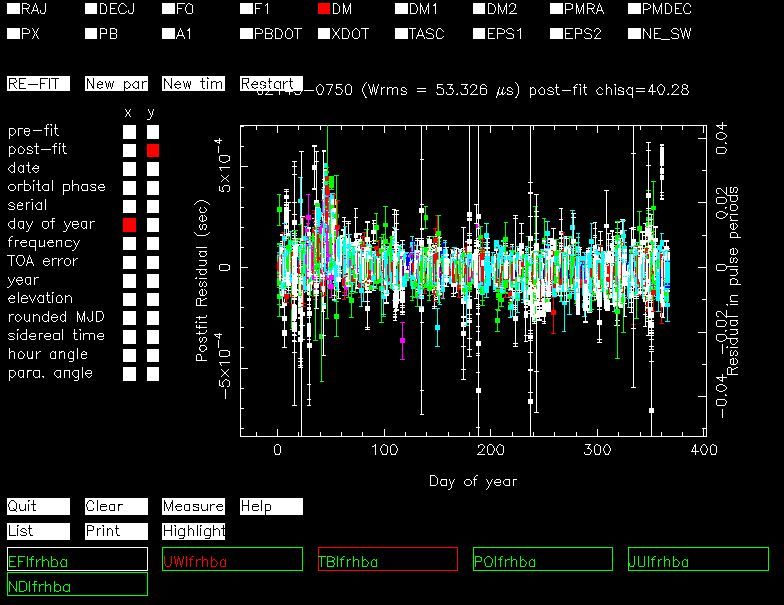
1.2. Pulsprofile
Pulsare sind sehr schwache Radioquellen, daher sind nur von wenigen Pulsaren die Ra-
diopulse direkt messbar. Um das Pulsprofil einzelner Pulsare sichtbar zu machen, müssen
hunderte bis tausende einzelne Pulse im Prozess der Faltung aufaddiert werden, sodass
ein integrated pulse profile entsteht. Solche integrierten Pulsprofile sind für ausgewählte
Pulsare in Abb. 3 zu sehen. Auch wenn die einzelnen Pulse eines Pulsars verschiede-
ne Formen haben können, so ist das integrierte Pulsprofil bei gleichen beobachteten
Frequenzen ein charakteristisches Merkmal eines Pulsars. Es gibt einen Einblick in die
Intensitätsverteilung eines Durchschnitts des Emissionskegels.
Abb. 3: Integriere Pulsprofile von neun Pulsaren. Mit Ausnahme von PSR B1237+25 wird
eine komplette Periode des Pulsars gezeigt. Für B1237+25 werden zwei verschiedene
Moden gezeigt, die zur besseren Veranschaulichen vergrößert wurden. Um die zeitliche
Änderung des Pulsprofils, die aus der geodetischen Präzession resultiert, darzustel-
len, wurde für PSR B1913+16 das integrierte Pulsprofil aus verschiedenen Jahren,
bei gleicher Beobachtungsfrequenz dargestellt. Für PSR B1937+21 wurde oben das
tatsächliche Pulsprofil dargestellt, aus welchem die Dispersion (siehe Kapitel 1.5.1)
herausgerechnet wurde. Das tatsächlich gemessene Profil ist unten zu sehen. Die Ab-
bildung wurde Lorimer & Kramer, 2012, Kapitel 3 entnommen.
Obiger Abbildung ist zu entnehmen, dass die verschiedenen Pulsprofile sehr stark in
ihrer Komplexität variieren. So hat PSR B1933+16 beispielsweise einen stark gaußför-
migen Puls, während PSR B1913+16 zwei ausgeprägte Peaks vorweist. Außerdem sind
auch kompliziertere Pulsprofile aus mehreren Komponenten möglich, wie etwa bei PSR
B1237+25 und PSR J0407+1607.
Im Allgemeinen ist festzustellen, dass Millisekundenpulsare ein komplizierteres Pul-
sprofil aufweisen als normale Pulsare. So bestehen die Pulsprofile von normalen Pulsaren
4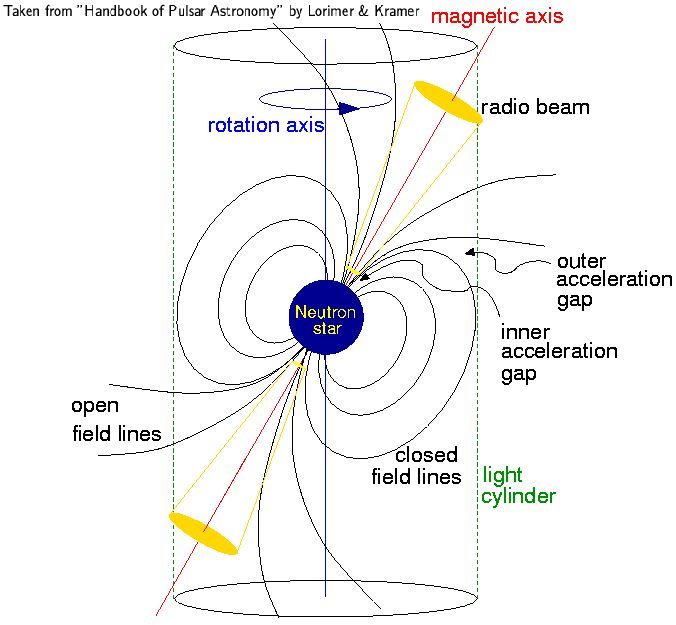
Abb. 4: Abbildung des hallow cone-Modells und des patchy beam-Modells. Die Abbildung
wurde Lorimer & Kramer, 2012, Kapitel 3 entnommen.
aus 3±1 gaußförmigen Komponenten und die Profile von Millisekundenpulsaren aus 4±1
Komponenten. (Kramer et al., 1998)
In einigen wenigen Fällen, wie etwa bei PSR B0826-34 (siehe Abb. 3d) wird während
der ganzen Pulsperiode ein Signal empfangen. Dies kommt daher, dass die magnetische
Achse nahezu mit der Rotationsachse des Pulsars übereinstimmt. Dabei kann es passie-
ren, dass die LoS durchgehend im Emissionskegel ist, wodurch durchgehend ein Signal
empfangen werden kann.
Im Gegensatz zu dieser Beobachtung steht der Fall, dass die magnetische Achse und
die Rotationsachse senkrecht aufeinander stehen. Liegt auch hier die LoS wieder passend,
so kann ein zweiter Puls beobachtet werden, der um 180◦ phasenverschoben zum ersten
Puls ist (siehe PSR J0737-3039A in Abb. 3c). Diese Pulse werden Interpulse genannt.
Eine alternative Hypothese, welche zuerst von Manchester und Lyne (1977) präsentiert
worden ist, besagt, dass Interpulse die Emission an äußeren Extremstellen eines einzelnen
sehr aufgeweiteten Emissionskegels sind.
Weitere Möglichkeiten der Entstehung der verschiedenen Pulsprofile liegen beispiels-
weise in dem hollow cone-Modell (siehe Abb. 4), welches zuerst 1970 von Komesaroff
vorgestellt wurde und davon ausgeht, dass der Emissionskegel einen inneren Kegel be-
sitzt, aus dem keine Strahlung emittiert wird. Je nach dem, wie hier die LoS den Kegel
schneidet, können somit mehrere Peaks beobachtet werden. Das patchy beam-Modell geht
hingegen davon aus, dass der Emissionskegel auf zufällige Art und Weise mit emittie-
renden und nicht-emittierenden Sektionen gefüllt ist, wodurch sich auch kompliziertere
Pulsprofile erklären lassen. (Lyne & Manchester, 1988)
1.3. Pulsar Timing
Aufgrund ihrer periodischen Rotation eignen sich Pulsare besonders dazu sie als Uh-
ren zu verwenden. Hierbei ist zu beachten, dass Millisekundenpulsare deutlich präzisere
Uhren sind als langsamere Pulsare. Dies kommt unter anderem daher, dass die Rotati-
onsfrequenz drei Größenordnungen größer ist als bei normalen Pulsaren. Dies führt zu
einer erheblich größeren Genauigkeit bei Timing Messungen. Dank ihrer hohen Präzision
sind Messungen mit Millisekundenpulsaren auch für exotischere Anwendungen möglich.
5
Wie bereits in Kapitel 1.2 beschrieben sind Pulsare sehr schwache Radioquellen, deren
Signal aufbereitet werden muss, bevor das eigentliche Puls sichtbar wird. So werden die
Daten zunächst mit einem Radioteleskop empfangen um anschließend aus den Messun-
gen die Dispersion (siehe Kapitel 1.5.1) heraus zu rechnen und die verschiedenen Signale
für eine bestimmte Messdauer auf zu addieren und dabei passend über einander zu le-
gen. Dabei entscheidend ist die time of arrival (TOA, dt. Ankunftszeit) der einzelnen
Signale.
Werden viele Messungen addiert, so dass ein Signal mit hohem signal to noise ra-
tio (S/N, dt. Signal-zu-Rauschen Verhältnis) entsteht, wird das Resultat Template (dt.
Vorlage) genannt. Diese Templates P(t) sind im Normalfall zeitlich verschoben zum
Standardprofil T (t) des Pulsars:
P(t) = a + b · T (t − τ ) + N (t) .
Dabei ist a ein Offset, b ein Skalierungsfaktor und N (t) das Rauschen der Messung. Das
Standartprofil wird meistens aus einer Summe von mehreren Gaußkurven erzeugt. Mehr
dazu in Kapitel 2.
Da aufgrund der Eigenrotation der Erde und der Bewegung der Erde um die Sonne
verschiedene TOAs zu verschiedenen Zeitpunkten gemessen werden, muss aus dem topo-
zentrischen System der Erde das Signal in den Schwerpunkt des Sonnensystems (SSB)
transformiert werden. Dies ist unter anderem wichtig, da auf diese Weise Messungen
von verschiedenen Messstationen über einen langen Zeitraum zusammengetragen und
gemeinsam verwendet werden können. Für einen Pulsar ohne Begleiter transformiert
sich eine topotentrische TOA ttopo in eine baryzentrische TOA tSSB wie folgt:
tSSB = ttopo + tcorr − ∆D/f 2 + ∆R + ∆S + ∆E . (1)
Werden hingegen die TOAs eines Pulsars aus deinem Doppelsternsystem betrachtet, so
kommen weitere Terme hinzu. Auf die einzelnen Terme wird im Folgenden eingegangen
werden. Die Korrektur tcorr ist eine einfache Zeitkorrektur, die aus verschiedenen ver-
wendeten Zeitstandarts resultiert, auf die in dieser Arbeit nicht näher eingegangen wird.
Da die Dispersion für eine weitere Verzögerung der TOAs sorgt, wird diese im Term
∆D/f 2 berücksichtigt. ∆D ist dabei definiert als das Produkt aus der Dispersionskon-
stanten D und dem Dispersionsmaß DM, auf die in Kapitel 1.5.1 genauer eingegangen
wird. Die letzten drei Terme in Gleichung 1 berücksichtigen die tatsächlichen baryzen-
trischen Korrekturen, die nötig sind um die TOAs in das SSB zu transformieren. ∆R
repräsentiert das sogenannte Römer delay, welcher den Zeitunterschied berücksichtigt,
den das Licht auf dem Weg zum SSB statt zur Erde benötigt. Das Saphiro delay, ∆S , ist
eine relativistische Korrektur, die aufgrund der Verformung der Raumzeit durch die Prä-
senz von sehr großen Massen, die der Puls auf dem Weg durch das Universum passiert,
notwendig wird. Die letzte Korrektur ∆E , das Einstein delay, berücksichtigt die Zeit-
dilatation, die aus der Bewegung der Erde um die Sonne resultiert, und die gravitative
Rotverschiebung, die durch andere Massen im Sonnensystem verursacht wird.
Wird stattdessen ein Pulsar beobachtet, der Teil eines Doppelsternsystems ist, so muss
6Gleichung 1 um vier weitere Terme ergänzt werden:
tSSB = ttopo + tcorr − ∆D/f 2 + ∆R + ∆S + ∆E + ∆RB + ∆SB + ∆EB + ∆AB . (2)
Die obige Gleichung beinhaltet ein zusätzliches Römer delay, dass aus dem Orbit der bei-
den Sterne resultiert. Aufgrund des Gravitationsfeldes des Partners des Pulsars müssen
auch zusätzliche Shapiro und Einstein delays berücksichtigt werden. Die letzte Korrek-
tur, ∆AB , beinhaltet die Aberration und ist eine geringe relativistische Korrektur, die in
der Praxis keine Anwendung findet.
1.4. Messverfahren und Tempo2
Die in Gleichung 1 und 2 verwendeten Parameter sind nach der Entdeckung eines Pul-
sars nicht, beziehungsweise nur sehr ungenau, bekannt. Daher müssen sie schrittweise
mithilfe von least-squares-fits bestimmt werden. Diese Parameter werden in drei Katego-
rien eingeteilt. Die erste dieser Kategorien bilden die astronomischen Parameter, welche
die Position, sowie Eigenbewegung und Parallaxe des Pulsars beinhaltet. Als nächstes
werden die Rotationsparameter unterschieden, welche die Rotationsfrequenz des Pulsars
mitsamt ihrer Ableitungen beinhaltet, um die Drehbewegung möglichst genau beschrei-
ben zu können. Zuletzt gibt es die Kategorie der binären Parameter, welche die Bewegung
von Pulsar und dessen Begleiter umeinander beschreiben.
Das Ziel ist es nun, mithilfe mehrerer Fits die Parameter nacheinander so zu bestim-
men, dass der Pulsar möglichst perfekt beschrieben wird und jede Rotation des Pul-
sars beinhaltet. Dazu wird zunächst mit einem kleinen Datensatz von phasenkohärenten
TOAs begonnen, deren gemeinsame Unsicherheit in den Startparametern geringer ist
als eine Pulsperiode. Anschließend wird der Datensatz langsam erweitert, wobei jedoch
die Phasenkohärenz aufrechterhalten bleiben muss. Ist dies erfolgreich gelaufen, so sind
die Residuen gaußförmig um den Nullpunkt verlagert mit einer mittleren quadratischen
Abweichung in der Größenordnung der Fehler der TOAs.
Ein möglicher Test, um dieses Verfahren auf seine Qualität zu prüfen besteht dar-
in, einen neuen Datensatz aus ngem gemittelten Residuen zu erzeugen. Sinkt dabei die
√
mittlere quadratische Abweichung um ngem , so kann davon ausgegangen werden, dass
keine systematischen Fehler vorliegen.
Anschließend können weitere Daten, die über einen längeren Zeitraum aufgenommen
wurden, in den Fit mit einbezogen werden, die es ermöglichen die Rotationsfrequenz des
Pulsars und deren Ableitungen sowie die Position des Pulsars genau zu bestimmen.
Die oben beschriebene Methodik wird vollständig von dem Programm Tempo2 über-
nommen, auf das in Kapitel 2.4 genauer eingegangen werden wird. Auch hier ist es das
Ziel die Fitparameter so zu bestimmen, dass die Residuen minimiert werden, um eine so-
genannte Ephemeris zu erzeugen, welche die Fitparameter und sämtliche Informationen
über die Postion und Rotation des Pulsars enthält.
7Abb. 5: Darstellung verschiedener Residuen von PSR B1133+16. (a) ohne systematischem
Fehler, (b),(c) und (d) mit systematischem Fehler. Die Abbildung wurde Lorimer &
Kramer, 2012, Kapitel 8 entnommen.
Abbildung 5 zeigt verschiedene erzeugte Residuen. In der oberen linken Ecke ist da-
bei white-noise zu sehen. Das bedeutet, dass die einzelnen Messwerte zufällig um den
Nullpunkt verteilt sind. Von red-noise wird hingegen gesprochen, wenn Fehler erkannt
werden können, die sich über eine große Zeitskala erstrecken. Red-noise kann durch li-
neare Trends in der Fouriertransformierten identifiziert werden. Niedrigere Frequenzen
haben hierbei eine höhere Intensität als hohe Frequenzen. In der unteren linken Ecke
ist hingegen eine quadratische Steigung zu erkennen, welche von einem unterschätztem
spin-down des Pulsars stammt. In der oberen rechten Ecke ist ein periodisches Signal
zu erkennen, welches aus Fehlern in den Timingparametern resultiert. Die untere rechte
Ecke zeigt ein periodisches Signal mit ansteigender Amplitude, welches durch Fehler der
Annahme der Eigenbewegung des Pulsars folgt.
1.5. Wechselwirkungen mit dem interstellarem Medium
Auf ihrem Weg zur Erde durchlaufen die Radiopulse das interstellare Medium (ISM),
aufgrund dessen verschiedenen Effekte wie Dispersion, Faraday-Rotation, Szintillation
und Streuung, auf die Wellenfronten einwirken, die das vom Pulsar ausgehende Signal
nachhaltig in den gemessenen TOAs, den Pulsprofilen und Pulsbreiten, sowie den Pola-
risationswinkeln beeinflussen. Auf diese Effekte wird im folgenden eingegangen werden.
1.5.1. Dispersion
Um die Effekte der Dispersion und nachher auch der Faraday-Rotation genauer ver-
stehen zu können, wird das ISM als homogen betrachtet werden. Elektromagnetische
Strahlung, wie sie von Pulsaren und anderen Strahlungsquellen emittiert wird, erfährt
8bei der Ausbreitung durch das ISM einen frequenzabhängigen Brechungsindex. Wer-
den kleine Korrekturen, die aufgrund des magnetisches Feldes des Weltraums auftreten,
vernachlässigt, so lässt sich der Brechungsindex wie folgt schreiben:
v
u !2
u fp
µ= t
1− . (3)
f
Dabei beschreibt f die beobachtete Frequenz und fp die Plasmafrequenz
s
e2 ne ne
r
fp = ' 8, 5kHz · ,
πme cm−3
welche abhängig von der Elektronendichte ne ist. Diese wird für das ISM oft als 0, 03cm−3
angenommen. Das entspricht einer Plasmafrequenz von fp ' 1, 5kHz. Das Formelzeichen
e steht in obiger Gleichung für die Elektronenladung, während me die Masse des Elek-
trons beschreibt. Gleichung 3 ist zu entnehmen, dass für f < fp keine Propagation
möglich ist und µ < 1. Daraus folgt, dass die Gruppengeschwindigkeit vg = cµ geringer
ist als die Lichtgeschwindigkeit c. Das bedeutet, dass ein Radiosignal, dass die Strecke d
zwischen Pulsar und Erde zurück legt, immer zeitlich verzögert zu einem hypothetischen
Signal mit unendlicher Frequenz gemessen wird. Für diese Zeitdifferenz gilt:
Z d !
dl d
t= − .
0 vg c
Wird nun die Gruppengeschwindigkeit durch vg = cµ substituiert, so findet sich unter
der Annahme fp
f um µ zu approximieren folgende Zeitdifferenz:
Rd
fp2
!
1Z d d e2 0 ne dl DM
t= 1 + 2 dl − = 2
≡D· 2 .
c 0 2f c 2πme c f f
Das Dispersionsmaß DM= 0d ne dl wird üblicherweise in cm−3 pc angegeben. Die Disper-
R
e2
sionskonstante beträgt D ≡ 2πm ec
= (4, 148808 ± 3 ∗ 10−6 ) · 103 MHz2 pc−1 cm3 s. Die
Unsicherheit dieser Konstante folgt allein aus den Unsicherheiten der Elementarladung
und der Elektronenmasse. Mithilfe dieser Kenntnisse lässt sich nun die Zeitdifferenz
zwischen zwei Signalen verschiedener Frequenz bestimmen.
∆t ' D · f1−2 − f2−2 · DM
Dieser quadratische Zusammenhang ist sehr gut in Abb. 6 zu erkennen. Sind die TOAs
für mehrere Frequenzen bekannt, so kann unter einer geeigneten Annahme für die Elek-
tronendichteverteilung ne des ISM mithilfe des DM die Entfernung zum Pulsar analytisch
bestimmt werden.
9Abb. 6: Dispersion der Pulse von PSR B1356-60 für verschiedene Frequenzen. Das DM beträgt
295 cm−3 pc. Die quadratische Abhängigkeit der Dispersion von der Frequenz ist gut
sichtbar. Die Abbildung wurde Lorimer & Kramer, 2012, Kapitel 1 entnommen.
1.5.2. Faraday-Rotation
Bei der Faraday-Rotation wird das ISM als kaltes und magnetisiertes Plasma betrach-
tet. Durchlaufen Radiopulse dieses Medium, so wird dabei der Polarisationswinkel der
Welle verändert. Dies liegt vor allem daran, dass jede linear polarisierte Welle als Su-
perposition zweier zirkular polarisierter Wellen betrachtet werden kann, wenn eine der
Wellen linkszirkular und die andere rechtszirkular polarisiert ist. Die beiden zirkular
polarisierten Wellen erfahren aufgrund des zur Ausbreitungsrichtung parallelen Magnet-
feldes verschiedene Brechungsindizes, was dazu führt, dass eine der Wellen langsamer
propagiert als die andere. Dies wiederum führt zu Rotation der Superposition der beiden
zirkular polarisierten Wellen. Die Welle erfährt auf ihrem gesamten Weg vom Pulsar zur
Erde eine Rotation der Polarisation von ∆Ψ = −kd, wobei k = 2π/λ die Wellenzahl
10und λ die Wellenlänge ist. Für ein kaltes magnetisiertes Plasma findet sich
v
fp2 fp2 fB
u
2π 2π u
k(f ) = µf = f 1−
t ∓ 3 , (4)
c c f2 f
wobei fB der Zyklotronfrequenz entspricht, in die das zur LoS parallele Magnetfeld B||
mit einspielt:
!
eB|| B||
fB = ' 3 MHz · .
2πme c G
Für unsere Galaxie ist B|| ' 1µG, woraus für das ISM fB ' 3Hz folgt. Der letzte Term
in Gleichung 4 berücksichtigt die verschiedenen Ausbreitungsgeschwindigkeiten der links
(−) und der rechtspolarisierten (+) Welle. Die aus diesem Geschwindigkeitsunterschied
resultierende Rotation der Welle wird durch
Z d
∆ΨF araday = (kR − kL )dl
0
beschrieben, wobei kR und kL die Wellenzahlen der rechts- und linkspolarisierten Welle
sind. Da f
fp und f
fB findet sich
e3 Z d
∆ΨF araday = ne B|| dl.
πm2e c2 f 2 0
Der Polarisationswinkel (engl. polarisation position angle, PPA) ist im Gegensatz zu
∆ΨF araday nicht periodisch in 2π, sondern periodisch in π. Daher gilt
∆ΨP P A = ∆ΨF araday /2 ≡ λ2 · RM ,
wobei das Rotationsmaß RM wie folgt definiert ist:
e3 Z d
RM ≡ ne B|| dl
2πm2e c4 0
Über die Kombination von DM- und RM-Messungen können unter Betrachtung mehrerer
Pulsare Rückschlüsse auf das Magnetfeld der Galaxie geführt werden.
111.5.3. Streuung und Szintillation
Die Streuung und Szintillation sind auf die vorerst vernachlässigten Inhomogenitäten
des ISM zurück zu führen, welche aus verschiedenen Elektronendichten ne resultieren.
Durchfährt ein Puls eine solche Inhomogenität der Länge a, so wird die Welle aufgrund
des veränderten Brechungsindex gebrochen. Nach dem Passieren dieser Inhomogenität ist
die ausgehende Welle aufgrund des aus der Brechung resultierenden Wegunterschieds um
δΦ = ∆ka phasenverschoben, wobei k = (2π/c)·µf die Wellenzahl ist. Auf dem Weg vom
Pulsar zur Erde durchläuft eine Welle d/a
q solcher Irregularitäten der Elektronendichte,
was zu einer mittleren Variation ∆Φ ≈ d/a · δφ der Phase führt.
Abb. 7: Darstellung eines vom Pulsar ausgehenden Strahls, der an der Inhomogenität ge-
brochen und von der Erde aus beobachtet wird. Die Abbildung wurde Lorimer &
Kramer, 2012, Kapitel 4 entnommen.
Dieser Effekt ist besonders gut zu erkennen, wenn mittig zwischen Pulsar und Erde
eine Inhomogenität der Breite a betrachtet wird, die den eingehenden Strahl um Θ0
bricht (siehe Abb. 7). Das Ergebnis dieser Brechung ist eine von der Erde aus sichtbare
diffuse Scheibe, die den Pulsar in ihrem Zentrum trägt. Hierbei ist es offensichtlich, dass
Strahlen, die durch die Inhomogenität gebrochen werden, einen deutlich längeren Weg
zurücklegen und damit zeitlich verzögert zu den ungebrochenen Strahlen gemessen wer-
den. Die gemessene Intensitätsverteilung ist somit proportional zu der Scattering Time
τs (dt. Streuzeit) I(t) ∝ e−∆t/τs , welche den gemessenen Pulsprofilen einen einseitigen
exponentiellen Abfall verleiht. Dies ist in Abb. 8 deutlich zu erkennen. Zudem ist auf-
fällig, dass der exponentielle Abfall mit abnehmender Frequenz schwächer wird und das
Signal zeitgleich stärker gestreut wird.
12Abb. 8: Pulsprofile von PSR B1831−03 für verschiedene Frequenzen. Durchgezogene Linien
sind Fits an Messwerte. Die Abbildung wurde Lorimer & Kramer, 2012, Kapitel 1
entnommen.
1.6. Die Heliosphäre
Die Sonne ist ein durchschnittlicher Hauptreihenstern der G Spektralklasse im Zentrum
unseres Sonnensystems. Im Kern der Sonne fusioniert unter hohem Druck und bei hoher
Temperatur Wasserstoff zu Helium. Bei diesem Prozess entstehen unter anderem Neutri-
nos, die aufgrund ihrer geringen Wechselwirkung direkt auf der Erde gemessen werden
können. Neben diesen Neutrinos entsteht zudem Wärme, welche über Wärmestrahlung
nach außen abgegeben wird. Dies geschieht jedoch nicht direkt, da die Photonen von
Atomen im Inneren der Sonne immer absorbiert und anschließend emittiert werden. Da-
bei entsteht ein zufälliger Strahlengang durch die Sonne, der üblicherweise zwischen 104
und 105 Jahren dauern kann. Die Photonen entweichen der Sonne schließlich aus der
Photosphäre. Die äußerste Schicht der Sonne ist die Korona, welche so heiß ist, dass
Materie in Form des Sonnenwinds abgeschieden wird. Die Sonnenwinde können dabei
Geschwindigkeiten von einigen hundert Stundenkilometern erreichen und die Sonne ver-
liert durch diesen Prozess ungefähr 109 kg/s. Sonnenwinde bestehen zum Großteil aus
ionisiertem Wasserstoff und Helium und verdrängen das ISM. Die sogenannte Helio-
sphäre ist die Zone, in der der Sonnenwind das ISM verdrängt hat. Auch der ionisierte
Sonnenwind hat also einen Einfluss auf Pulsar Timing Messungen, wenn die LoS durch
13die Heliosphäre verläuft. Bei Pulsaren nahe der Ebene, die durch die Bewegung der Erde
um die Sonne aufgespannt wird (engl. ecliptic plane), sind diese Effekte besonders präg-
nant, da ihre LoS der Sonne sehr nah kommt. Deshalb werden in dieser Arbeit solche
Pulsare untersucht werden. Tritt die LoS nun in die Heliosphäre ein, oder verschwindet
der Pulsar gar hinter der Sonne, so wird von solar conjunction (dt. Sonnenkonjunktion)
gesprochen. (Burke & Graham-Smith, 2010)
1.7. Low Frequency Array
Das Low Frequency Array (LOFAR) ist ein neuartiges Radioteleskop, welches von dem
niederländischen Institut ASTRON konzipiert wurde. LOFAR besteht aus mehreren
Stationen, die über ganz Europa verteilt liegen. Der Großteil dieser Stationen liegt in
den Niederlanden, sechs der Stationen liegen in Deutschland. Jede Station besteht aus
den selben Bestandteilen. Dazu gehören Kreuzdipole in zwei verschiedenen Größen, um
verschiedene Frequenzbereiche messen zu können und ein Supercomputer, der die einge-
henden Daten auswertet. Die Dipole messen den Frequenzbereich von 10-80 MHz und
von 110-240 MHz. Der Bereich von 80 MHz bis 110 MHz wird bewusst nicht gemessen, da
in diesem Bereich Frequenzen liegen, die von FM-Radiosendern verwendet werden und
die kosmischen Radiowellen so unter den menschengemachten Wellen unter gehen. Der
Vorteil von LOFAR gegenüber herkömmlichen Radioteleskopen ist, dass mehrere Ra-
dioquellen gleichzeitig beobachtet werden können. Klassische Radioteleskope bestehen
hingegen aus einem großen reflektierenden Paraboloiden, der die ankommenden Wellen
in seinen Brennpunkt fokussiert, wo die Wellen gemessen werden können. Dazu muss das
Teleskop jedoch stets auf die Quelle ausgerichtet sein und das Teleskop muss aufgrund
der Erdbewegung stetig nachjustiert werden. (Max Planck Institut für Radioastronomie,
o.D.)
Abb. 9: Strahlengang beim Messen mit einer LOFAR-Station. Die Grafik wurde der Inter-
netseite des Max Planck Institut für Radioastronomie entnommen.
14Der obigen Abbildung ist zu entnehmen, dass ein solches LOFAR-Teleskop nicht auf
die Quelle ausgerichtet werden muss, da die physische Verzögerung, die aufgrund des
Wegunterschieds entsteht, durch eine künstliche Verzögerung ausgeglichen werden kann.
Es ist sogar möglich mehrere Richtungen gleichzeitig zu beobachten. Die einzige Grenze
ist durch die Rechenkapazität des Supercomputers gegeben. (Max Planck Institut für
Radioastronomie, o.D.)
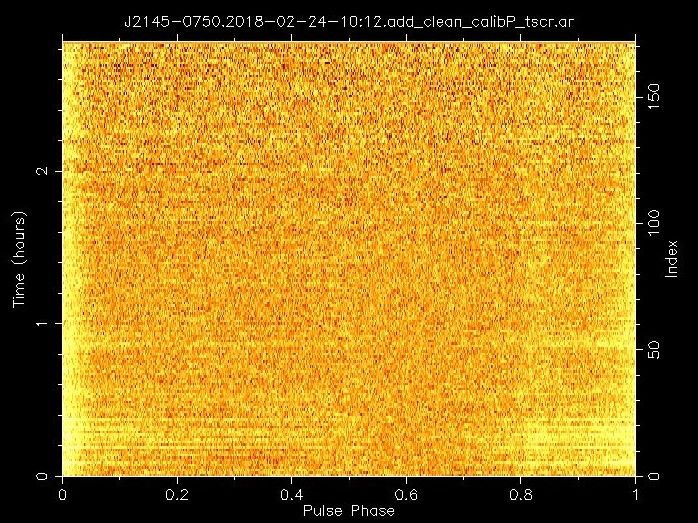
152. Datenverarbeitung An den LOFAR-Stationen werden Dateien (auch Archives) erzeugt, die alle Informatio- nen zu den Messreihen enthalten. Diese Archives müssen allerdings weiter verarbeitet werden, um die Pulsare und insbesondere die Effekte des Sonnenwinds auf Pulsar Ti- ming Messungen genauer untersuchen zu können. Zur Bearbeitung der Messwerte wird ein Open-Source Programmpaket namens psrchive verwendet. Üblicherweise enthalten die Archives Informationen über die Zeitpunkte der Messun- gen, der aufgenommenen Frequenzen und der Polarisation des Pulses. Von den Telesko- pen werden oft Dateien in verschiedenen Frequenzbereichen bereitgestellt, die zu einer großen Datei zusammengefügt werden müssen. 2.1. Pulsar Archive Manipulator Ein Teil von psrchive ist das Programm pam (Pulsar Archive Manipulator), mit dem die aufgenommenen Messungen manipuliert werden können. Mittels verschiedener Kom- mandos und angegebener Optionen können die Informationen, wie etwa die Polarisation oder die gemessenen Frequenzen, so gemittelt werden, dass zum einen weniger Speicher- platz benötigt wird und gleichzeitig die Berechnung der relevanten Messwerte schneller möglich ist. Diese Mittelungen werden auch Scrunches genannt. Mithilfe der Scrunches ist es möglich die Messwerte entweder über die gesamte Zeit zu mitteln oder einen Faktor anzugeben, um den die Anzahl der Zeitkanäle reduziert werden soll. Selbiges funktioniert genauso für die Frequenz. Außerdem ist es möglich die Polarisation so zu mitteln, dass die Intensität des Signals maximiert wird. Eine weitere wichtige Möglichkeit, die pam bietet, besteht darin die Effekte der Dispersion aus den Messwerten herauszurechnen. Je nachdem, was mit den Messwerten untersucht werden soll, sind verschiedene Scrunches und Manipulationen sinnvoll. 2.2. Entfernen von Radiofrequenz-Interferenzen Mithilfe von pazi, was Teil von psrchive ist, können Zeit-Phase, Frequenz-Phase und Intensität-Phase Plots einfach dargestellt und bearbeitet werden. Pazi eignet sich be- sonders gut um Radiofrequenz-Interferenzen (RFI) aus den Messdaten herauszufiltern, welche die Messsignale stören. Die verwendeten Messdaten wurden bereits im Vorhinein von einem Algorithmus auf RFI untersucht und gefundene Interferenzen entfernt. Da dieser Algorithmus jedoch nicht perfekt funktioniert, müssen die übrigen RFIs händisch entfernt werden. In Abbil- dung 10 sind oben die Plots mitsamt des übrig gebliebenen RFI zu sehen. RFI ist oft an waagerechten Linien zu erkennen und tritt in diesem Beispiel besonders in der ersten halben Stunde und kurz vor Ende der ersten Stunde der Messung auf. Mithilfe von pazi lassen sich nun einzelne ungewollte Messreihen der zugehörigen Zeiten entfernen. Zudem ist es möglich in der Frequenz-Phase Darstellung ungewollte Frequenzen, beziehungs- weise Frequenzbereiche, zu entfernen. Dies ist allerdings nicht zu empfehlen, da so die gelöschte Frequenz aus jeder einzelnen Messreihe gelöscht wird, was zu einem großen 16
Verlust an Information führt. Werden hingegen nur die herausstehenden Messreihen in
der Zeitdomäne gelöscht, so bleiben alle Frequenzbereiche erhalten und der Verlust an
Information fällt deutlich geringer aus. In der unteren Hälfte von Abbildung 10 wurden
die ungewollten Interferenzen ausgeschnitten. Da die RFI eine Störung des Signals sind,
sorgen sie dafür, dass das Rauschen des Intensität-Phase Plots zunimmt. Dabei spielt
das Signal-zu-Rauschen Verhältnis (engl. signal to noise ratio, S/N) eine große Rolle,
da es mit zunehmendem Rauschen abnimmt. Bei genauerer Betrachtung von Abbildung
10 fällt auf, dass sich das S/N (in der Abb. „snr“) nach ausschneiden des RFI verrin-
gert. Dies liegt daran, dass für das Programm nicht immer ganz klar ist, welche Teile
des Plots zum Signal gehören und welche zum Rauschen. Aus diesem Grund sind kleine
Änderungen im S/N nicht von Relevanz.
Abb. 10: Messreihe des Pulsars J2145−0750. Zeit-Phase und Intensität-Phase Plots. Oben:
unverbesserte Plots mit gut erkennbarem RFI; Unten: selbes Messreihe, jedoch mit
ausgeschnittenem RFI.
Abbildung 11 zeigt beispielhaft, wie eine gute Messreihe aussehen kann. So sind auf der
rechten Seite im Zeit-Phase Plot keine waagerechten Linien oder andere Auffälligkeiten
zu sehen. Auch der Intensität-Phase Plot weißt deutlich weniger Rauschen auf, als die
Darstellungen in Abbildung 10. Dies spiegelt sich auch im S/N wieder. Zudem ist auch
17die Intensität des Peaks deutlich höher.
Abb. 11: Messreihe des Pulsars J2145−0750. Zeit-Phase und Intensität-Phase Plot als Bei-
spiel für eine gute Messreihe.
2.3. Erstellen eines Templates
Wie bereits in Kapitel 1.3 erwähnt, werden für Pulsar Timing Messungen Templates
benutzt, die möglichst frei von Rauschen sein müssen, um genaue Ergebnisse erzielen zu
können. Um dies zu erreichen, können entweder viele Messungen addiert werden, um das
S/N zu verbessern, oder es wird ein mathematisches Modell erstellt. Auf beide dieser
Methoden wird im Folgenden eingegangen werden.
2.3.1. Additive Verbesserung des S/N
Werden sehr viele Messreihen zusammenaddiert, sodass ein sehr langer Observations-
zeitraum entsteht, so sinkt zeitgleich das Rauschen. Werden nobs zusammen addiert, so
√
sinkt das Rauschen um einen Faktor von nobs . Ein solches addiertes Archive ist in
Abbildung 12 dargestellt.
18Abb. 12: Zeit-Phase und Intensität-Phase Plots eines addierten Archives.
Im Zeit-Phase Plot fällt besonders auf, dass der Puls sehr stark heraus sticht. Das
orange Rauschen, dass in den Abbildungen 10 und 11 besonders gut zu erkennen ist,
tritt in dem Plot des addierten Archives kaum auf. Auch das S/N hat sich um einen
Faktor von über 5 verbessert. Um einen noch störungsfreieres Template zu erhalten,
können Python Skripte auf das Template angewendet werden, die das addierte Templa-
te gewichten. Dies ist insbesondere wichtig, da Intensitätsschwankungen zwischen den
aufaddierten Messreihen dazu führen, dass viele intensitätsschwächere Messreihen weni-
ger ins Gewicht fallen als wenige intensitätsstärkere Messreihen. Um dies zu vermeiden,
normiert das Python Skript alle Messreihen auf die selbe Intensität, bevor die Messwer-
te addiert werden. Dies führt dazu, dass jede Messreihe gleich ins Gewicht fällt und ein
Template mit wenig Rauschen entsteht. Ein solches gewichtetes Archive ist in Abbildung
13 dargestellt. Es ist zu erkennen, dass weniger Rauschen auftritt, als in Abbildung 12.
Dies ist auch in dem von pazi berechnetem S/N zu beobachten.
Abb. 13: Intensität-Phase Plot eines gewichteten addierten Archives von PSR J2145−0750.
192.3.2. Pulsar Archive Analytic Standart Maker
Der Pulsar Archive Analytic Standart Maker (paas) ist ein Programm, das ebenfalls Teil
des Programmpakets psrchive ist und mitdessen Hilfe von-Mises-Funktionen, die für
periodische Funktionen das Äquivalent zur Normalverteilung darstellen (S. R. Jammala-
madaka & A. SenGupta, 2001), an Messwerte gefittet werden können, um ein rauschfreies
Template zu erhalten. Die grafische Oberfläche von paas ist in Abbildung 14 dargestellt.
Das in paas geladene Template, an welches die Funktionen gefittet werden sollen, ist
in blau dargestellt. Mithilfe der Maus ist es nun möglich das Zentrum eines Peaks,
die Halbwertsbreite und die Höhe des Peaks zu markieren und anschließend einen Fit
durchzuführen. Die gefittete Funktion ist in weiß zu sehen. Zusätzlich wird die Diffe-
renz zwischen Fit und Template in rot dargestellt. Das Ziel ist es nun nacheinander
von-Mises-Funktionen so zu fitten, dass die in rot dargestellte Differenz im Rauschen
untergeht. In grau sind die einzelnen von-Mises-Komponenten der finalen Fitfunktion
dargestellt. Dieses mathematisch konstruierte Template kann nun gespeichert und mit
anschließend für die Auswertung mit anderen Programmen verwendet werden.
Abb. 14: Darstellung der grafischen Oberfläche von paas mit Messwerten von PSR
J2145−0750.
2.4. Timing und Erstellen einer Ephemeris
Das Timing erfolgt mithilfe von Tempo2, welches ein auf Tempo1 basierendes Programm
ist, das von George Hobbs und Russel Edwards entwickelt und von Joris Verbiest verbes-
sert wurde. Auf die grundlegende Funktionsweise von Tempo2 wurde bereits in Kapitel 1.4
eingegangen. Um Tempo2 schlussendlich verwenden zu können, müssen einige Vorberei-
tungen getätigt werden. Dazu müssen zunächst die Residuen mittels Kreuzkorrelation
berechnet werden. Dies sind die Zeitdifferenzen, die zwischen der erwarteten Zeit des
Pulses und der tatsächlich gemessenen Zeit des Pulses liegen. Die Berechnung der Resi-
duen kann mithilfe des Programms pat (Pulsar Archive Timing) vorgenommen werden.
Zusätzlich wird für jedes dieser Residuen ein Fehler berechnet. Die Informationen über
den Zeitpunkt der Messung, der Residuen und deren Fehler werden gemeinsam in einer
20Timing Datei gespeichert. Zusätzlich wird als Startparameter der Fits eine Ephemeris
benötigt, die Informationen wie etwa die Position und des Spins des Pulsars enthält.
Diese Ephemeris kann entweder aus Archives extrahiert werden, oder aber aus Samm-
lungen entnommen werden. Das International Pulsar Timing Array (IPTA) veröffentlicht
regelmäßig für mehrere Pulsare die zugehörige Ephemeris.
Das Ziel der Nutzung von Tempo2 ist nun, die in das Programm geladene Ephemeris
mithilfe der berechneten Residuen so zu fitten, dass für die Residuen ausschließlich white-
noise vorliegt.
Abbildung 15 zeigt die grafische Oberfläche von Tempo2 zu zwei verschiedenen Zeit-
punkten. Im oberen Teil der Benutzeroberfläche sind verschiedene Parameter angegeben,
die ausgewählt werden können und nach denen gefittet werden kann. Die Parameter RAJ
und DECJ stehen für die Position des Pulsars am Himmel, während PMRA und PMDEC
die Bewegung in diesen Koordinaten beschreiben. F0 bezeichnet die Rotationsfrequenz
des Pulsars um seinen Massenschwerpunkt und F1 die Ableitung dieser Rotationsfre-
quenz. Zudem kann auch das Dispersionsmaß DM und dessen zeitliche Ableitung DM1
als Fitparameter ausgewählt werden (Australia Telescope National Facility, o.D.). In der
grafischen Oberfläche kann zudem die Auftragung der Residuen eingestellt werden. So
können die Residuen beispielsweise gegen das Datum der Messung aufgetragen werden.
Das Datum wird in der Astronomie üblicherweise in MJD (modified julian date) angege-
ben, welches die vergangenen Tage seit dem 17. November 1858 zählt. Weitere nützliche
Auftragungen bestehen darin die Residuen als Funktion ihrer Fehler darzustellen, um
Messungen mit Fehler größer als eine Periodendauer löschen zu können, oder aber die
Residuen als Funktion des Jahrestags aufzutragen. Letztere Auftragung ermöglicht schon
erste Einblicke in Effekte der Sonnenkonjunktion, wie beispielsweise in der rechten Seite
von Abbildung 15 um Tag 40.
Abb. 15: Grafische Oberfläche von Tempo2 mit zwei Beispielen von Fits für PSR J2145−0750.
Links: Residuen als Funktion des Messzeitpunkt; Rechts: Residuen als Funktion des
Jahrestags
Mit einer geeigneten Wahl von Fitparametern kann sich nun langsam der finalen
21Ephemeris angenähert werden. Die linke Seite der obigen Darstellung ist während des Fitprozesses aufgenommen worden und es ist ein eindeutiger sinusförmiger Trend über meherere Jahre zu beobachten. Dies deutet eindeutig darauf hin, dass Timing Signaturen vorliegen und die Fitparameter weiter angepasst werden müssen. Im Gegensatz dazu ist auf der rechten Seite der Abbildung kein Langzeittrend zu erkennen. Die Residuen sind gleichverteilt um den Nullpunkt mit der Ausnahme eines Peaks um den Tag 40. Dennoch handelt es sich hierbei um white-noise. Die nun finale Ephemeris und auch die zugehörige Timing Datei können nun mithilfe der Schaltflächen „New par“ und „New tim“ gespeichert werden. 2.5. Messung des Dispersions- und Rotationsmaßes Zur Auswertung der Messwerte wurden verschiedene Python Skripte verwendet, auf deren Funktionsweise in den folgenden Kapiteln eingegangen wird. Das Python Skript zur Berechnung des Dispersionsmaßes wurde von C. Tiburzi et al. (2019) entwickelt. Die Messwerte des Rotationsmaßes wurden durch ein unveröffentlichtes Vorgehen erzeugt (Krishnakumar, M. A., pers. Mitt.). 2.5.1. Anpassen der Frequenzkanäle der Templates Da die in dieser Arbeit verwendeten Messwerte den sechs deutschen LOFAR-Stationen entstammen und diese zeitweise in verschiedenen Frequenzbereichen gemessen haben, ist es für die Auswertung wichtig, die Frequenzkanäle so anzupassen und zu entfernen, dass alle Messungen den selben Frequenzbereich abdecken. Dazu wurde dem Code ein Template mit der gewünschten Anzahl von Frequenzkanälen vorgegeben und der Code anschließend auf alle Archives angewendet. Der Code vergleicht nun die Frequenzbänder der Vorlage und des zu kürzenden Archives und erzeugt ein neues Archive, das die selben Frequenzbänder abdeckt wie Vorlage. Dies geschieht allerdings nur, wenn das zu kürzende Archive mindestens die gleichen Frequenzkanäle abdeckt wie die Vorlage. 2.5.2. Berechnung des Dispersionsmaßes Um das Dispersionsmaß zu berechnen, werden Frequenz-Scrunches auf die eingespeisten Archives angewendet, die die Frequenzkanäle um einen gewünschten Faktor reduzieren. Anschließend werden mittels Kreuzkorrelation, analog zur Vorbereitung der Messwerte auf die Bearbeitung mit Tempo2, die Residuen und ToAs für jede Frequenz und Messreihe bestimmt. Aus diesen Residuen werden die Messwerte entfernt, die stark von den anderen abweichen. Die restlichen Messwerte werden in Tempo2 geladen und für jedes Set an ToAs ein DM-Wert bestimmt. Aus diesen DM-Messwerten wird nun ein Mittelwert bestimmt, um anschließend diesen von den einzelnen Messwerten abzuziehen. Somit entsteht für jede Messung die Variation des DMs. Die dazugehörigen Messwerte mitsamt des Fehlers werden von dem Programm anschließend in einer Textdatei gespeichert. 22
2.5.3. Berechnung des Rotationsmaßes
Zur Berechnung des Rotationsmaßes ist die Polarisation des Signals entscheidend. Die
Polarisation von elektromagnetischen Wellen kann mithilfe von Stokes-Vektoren be-
schrieben werden, die wiederum aus den vier Stokes-Parametern I, Q, U und V be-
stehen. Der erste Parameter I beschreibt die totale Intensität. Die restlichen Parameter
beschreiben die Polarisation. Q und U sind dabei Parameter, die die lineare Polarisation
beinhalten, während V die zirkulare Polarisation beschreibt. Bei einer Messung wird
für jede Frequenz und für jede Zeit ein Stokes-Vektor gemessen, sodass eine Matrix von
Vektoren entsteht. Der Faraday Effekt hat vor allem einen Einfluss auf die beiden Pa-
rameter der linearen Polarisation. Dies ist in der unteren rechten Ecke von Abbildung
16 zu erkennen. Der Einfluss des Faraday Effekts macht sich darin bemerkbar, dass die
Periodendauer der Schwingung in den Stokes Q und Stokes U gegen Freuenz Plots mit
zunehmender Frequenz ebenfalls zunimmt. Diese beiden Plots werden Fourier-zerlegt
und miteinander verrechnet, sodass die in Abbildung 16 oben rechts sichtbaren Plots
entstehen. In diesen Plots sucht das Programm das in rot markierte Maximum, um das
Rotationsmaß zu bestimmen. Auf der linken Seite der Abbildung ist ein Frequenz-Phase
Plot zu erkennen. Unter diesem Plot ist ein Intensität-Phase Plot dargestellt. In die-
sem Plot ist die Gesamtintensität in schwarz dargestellt, während der linear polarisierte
Anteil in blau eingefärbt ist. Der zirkular polarisierte Anteil ist in rot zu erkennen.
Neben dieser Darstellung gibt das Python Skript eine Datei aus, die Informationen
über die Messreihen enthält. Zu diesen Informationen zählt der Zeitpunkt der Messung,
das durch den Code berechnete DM mitsamt Fehler und das berechnete RM mit Fehler.
Zusätzlich kann das Skript Korrekturen für das RM ausgeben, die aufgrund der Effekte
der Ionosphäre der Erde notwendig werden.
23PSR J1136+1551 MJD : 58113.9892 RM Synthesis: RM = 4.4700 ± 0.0081 2rad m 2
DM : 4.84343 ± 0.00017 pc cm 3 RM BGLS: RM = 4.4744 rad m
1.00
RM BGLS
Spectral Power
0.75
180 0.50
0.25
0.00
170 20 15 10 5 0 5 10 15 20
160 1.00
RM Synthesis
Frequency (MHz)
Spectral Power
0.75
0.50
150 0.25
0.00
20 15 10 5 0 5 10 15 20
140 RM (rad m 2)
0.2
130
Stokes Q
0.0
120 0.2
0.35 0.40 0.45 0.50 0.55 0.60 0.65 120 130 140 150 160 170 180
0.2
Intensity (arb. units)
1.0
Stokes U
0.5 0.0
0.0 0.2
0.35 0.40 0.45 0.50 0.55 0.60 0.65 120 130 140 150 160 170 180
Pulse Phase Frequency (MHz)
Abb. 16: Output des Skripts zur Berechnung des Rotationsmaßes einer Messreihe von PSR
J1136+1551. Oben links: Frequenz-Phase Plot; Unten links: Intensität-Phase Plot.
Die Gesamtintensität ist in schwarz, die Intensität des linear polarisierten Lichts in
blau und die Intensität des zirkular polarisierten Lichts in rot dargestellt; Unten
rechts: Plots des Stokes Q und Stokes U als Funktion der Frequenz; Oben rechts:
aus den Stokes-Plots berechnete Leistungsspektren über dem RM. Das Maximum
ist in rot markiert.
2.5.4. Ionosphärische Korrekturen des Rotationsmaßes
Die Ionosphäre erstreckt sich über eine Höhe von 50 bis 1000km und beinhaltet so-
mit einen Großteil der Atmosphäre. Treffen ultraviolette Strahlen und Röntgenstrahlen
auf Teilchen der Ionosphäre, so werden diese ionisiert. Da das Rotationsmaß abhän-
gig von der Elektronenverteilung und dem Magnetfeld entlang der LoS ist, beeinflusst
die Ionisation der Ionosphäre RM-Messungen. Um die Effekte der Ionosphäre aus den
RM-Messungen heraus zu rechnen, können verschiedene Modelle angewendet werden.
Zwei dieser Modelle werden im Folgenden vorgestellt werden. Beide Modelle basieren
auf TEC-Karten (total electron content, dt. Gesamtelektronengehalt), welche die Elek-
tronenverteilung in azimutaler und äquatorialer Richtung beschreiben.
Das erste Modell wird im Folgenden dieser Arbeit als Thin-Sheet-Modell (dt. dünne-
Schicht-Modell) bezeichnet werden. Bei diesem Modell wird die Annahme gemacht, dass
sich alle Ionen in einer dünnen sphärischen Schicht befinden, in der das RM beeinflusst
wird. Diese Beeinflussungen können anschließend unter Zuhilfenahme der TEC-Karten
heraus gerechnet werden.
Ein komplizierteres Modell hingegen ist das Profiled Modell (dt. profiliertes Modell).
Bei diesem Modell werden die Elektronen nicht als in einer dünnen Schicht befindend
24angenommen, sondern über eine größere Strecke mit verschiedenen Elektronendichten
verteilt. Die Elektronenverteilung als Funktion der Höhe über der Erde ist in Abbildung
17 in rot dargestellt. Auch hier können die Effekte, die bei RM-Messungen hervorgerufen
werden mit Hilfe der TEC-Karten herausgerechnet werden, wobei der Gesamtelektro-
nengehalt über die gesamte Höhe der Ionospähre gemäß des Elektronenverteilung verteilt
wird.
Abb. 17: Schnitt durch die Schichten der Atmosphäre. Der Ionisationsgrad der verschiedenen
Schichten ist in rot dargestellt. (Deutsches Geodätisches Forschungsinstitut Der
Technischen Universität München, o.D.)
In beiden dieser Modelle spielt auch der Sonnenzyklus eine Rolle, der sich alle elf Jahre
wiederholt. Während dieses Zyklus nimmt die Aktivität der Sonne zu, bis sie ihr Aktivi-
tätsmaximum erreicht. Anschließend nimmt die Aktivität bis zum Aktivitätsminimum
ab. Ist die Sonne aktiver, so stößt sie mehr Sonnenwinde aus. Zeitgleich erreichen mehr
UV- und Röntgenstrahlen die Erde, wo die Ionosphäre stärker ionisiert wird. Auch die
Position der Erde auf ihrem Weg um die Sonne hat Auswirkungen auf die Korrekturen,
die bei Messungen angewendet werden. So kommt es, dass tagsüber mehr Strahlung auf
die Ionosphäre trifft und dort Teilchen ionisiert. Die Ionisation lässt über Nacht aller-
dings nach, da nachts weniger Strahlung auf die Ionosphäre trifft. Da ein Pulsar relativ
zur Sonne eine nahezu konstante Position hat, kommt es, dass beispielsweise im Sommer
der Pulsar nur tagsüber beobachtbar ist, während er im Winter nur nachts sichtbar ist.
Dies führt zu jährlichen Schwankungen in den Korrekturen, da die Ionosphäre tagsüber
stärkere Auswirkungen auf die Messsignale hat als nachts.
253. Analyse
Die vorgestellten Methoden wurden auf Messwerte des Pulsars PSR J1136+1551 und des
Millisekundenpulsars PSR J2145−0750 aus einem Zeitraum von 2013 bis 2019 angewen-
det. Die Ergebnisse der Untersuchungen werden in diesem Kapitel dargestellt werden.
3.1. DM-Messungen
Mithilfe des Python Skripts zur Berechnung der Variation des DM wurden für PSR
J1136+1551 und PSR J2145−0750 Messwerte berechnet, die in Abbildung 18 dargestellt
sind. Die jährlichen Zeitpunkte, an denen die LoS der Sonne am nächsten ist, sind in rot
dargestellt. Die Messwerte sind zusätzlich als Funktion des Tages im Jahr in Abbildung
23 dargestellt.
Der Pulsar PSR J2145−0750 ist mit einem ekliptischen Breitengrad von 5, 31◦ der
Sonne deutlich näher als PSR J1136+1551, der sich auf dem ekliptischen Breitengrad
12, 6◦ befindet. Aus diesem Grund sind die Effekte des Sonnenwinds deutlich ausgepräg-
ter für PSR J2145−0750. Dies ist auch in Abbildung 18 deutlich zu erkennen. Nähert
sich der Pulsar aus Sicht des Beobachters der Sonne an, so steigt das DM an. Der Effekt
des Sonnenwindes nimmt mit der Zeit ab.
Für den Pulsar PSR J1136+1551 ist der Effekt des Sonnenwindes weniger ausgeprägt.
Der einzige auffällige Peak liegt ungefähr bei MJD 57520. In der Nähe dieses Peaks liegt
allerdings keine Sonnenkonjunktion vor. Im Gegensatz zum Profil von PSR J2145−0750
ist das Profil von PSR J1136+1551 nicht nahezu gradlinig, sondern durchläuft eine
eindeutige Kurve, ohne Peaks zur Zeit der Sonnenkonjunktion.
Variation des DM von PSR J1136+1551 Variation des DM von PSR J2145-0750
0.0015 0.0015
DM Variationen DM Variationen
0.001
0.001
0.0005
0.0005
DM Variationen in pc/cm³
0
DM Variationen in pc/cm³
-0.0005 0
-0.001 -0.0005
-0.0015
-0.001
-0.002
-0.0015
-0.0025
-0.003 -0.002
56500 57000 57500 58000 58500 59000 56500 57000 57500 58000 58500 59000
MJD MJD
Abb. 18: Berechnete Variationen des Dispersionsmaßes und deren Fehlerbalken für PSR
J1136+1551 (links) und PSR J2145−0750 (rechts) als Funktion des Zeitpunkts der
Messung. In rot sind die Zeitpunkte der Sonnenkonjunktion dargestellt. Im rechten
Plot sind die zeitlich abnehmenden Effekte des Sonnenwinds zu Zeiten der Sonnen-
konjunktion deutlich sichtbar.
Die Peaks in dem DM-Profil von PSR J2145−0750 können eindeutig dem Sonnenwind
26Sie können auch lesen

















































