Numerische Simulation partikelbeladener Gasstr omungen mit der Euler-Lagrange-Methode - Diplomarbeit
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Numerische Simulation
partikelbeladener Gasströmungen
mit der Euler-Lagrange-Methode
Diplomarbeit
im Studiengang Mathematik
angefertigt an der Fakultät für Mathematik
der Technischen Universität Dortmund
von
Nikolas Vogt
Dortmund, Juni 2009
Danksagungen An dieser Stelle möchte ich mich bei Marcel Gurris für die Unterstützung und das Bereitstellen von Ergebnissen seiner Simulationen bedanken. Außerdem möchte ich mich bei meinen betreuenden Professoren JProf. Dr. Dmitri Kuzmin und Prof. Dr. Stefan Turek für die sehr freundliche und hilfreiche Unterstützung bedanken. Des Weiteren möchte ich mich für die Unterstützung während der Korrektur bei Christian Kühbacher und Kim Waldschläger bedanken.
Inhaltsverzeichnis
1 Einführung 1
1.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Kategorisierung von Mehrphasenströmungen . . . . . . . . . . . . 4
1.3 Simulation von Mehrphasenströmungen . . . . . . . . . . . . . . . 7
1.3.1 Das Euler-Euler-Modell . . . . . . . . . . . . . . . . . . . 7
1.3.2 Das Euler-Lagrange-Modell . . . . . . . . . . . . . . . . . 8
2 Das Euler-Lagrange-Modell 9
2.1 Modellierung der kontinuierlichen Phase . . . . . . . . . . . . . . 9
2.1.1 Erhaltungsgleichungen in ihrer allgemeinen Form . . . . . 10
2.1.2 Navier-Stokes-Gleichungen . . . . . . . . . . . . . . . . . . 12
2.2 Modellierung der dispersen Phase . . . . . . . . . . . . . . . . . . 14
2.2.1 Bewegungsgleichung des Partikels . . . . . . . . . . . . . . 14
2.2.2 Kräftebilanz für die Partikelbewegung . . . . . . . . . . . . 14
2.2.3 Partikel-Wand-Kollisionen . . . . . . . . . . . . . . . . . . 18
2.2.4 Partikel-Partikel-Kollisionen . . . . . . . . . . . . . . . . . 27
2.3 Volumenanteil der dispersen Phase . . . . . . . . . . . . . . . . . 30
2.4 Phasenwechselwirkung . . . . . . . . . . . . . . . . . . . . . . . . 31
i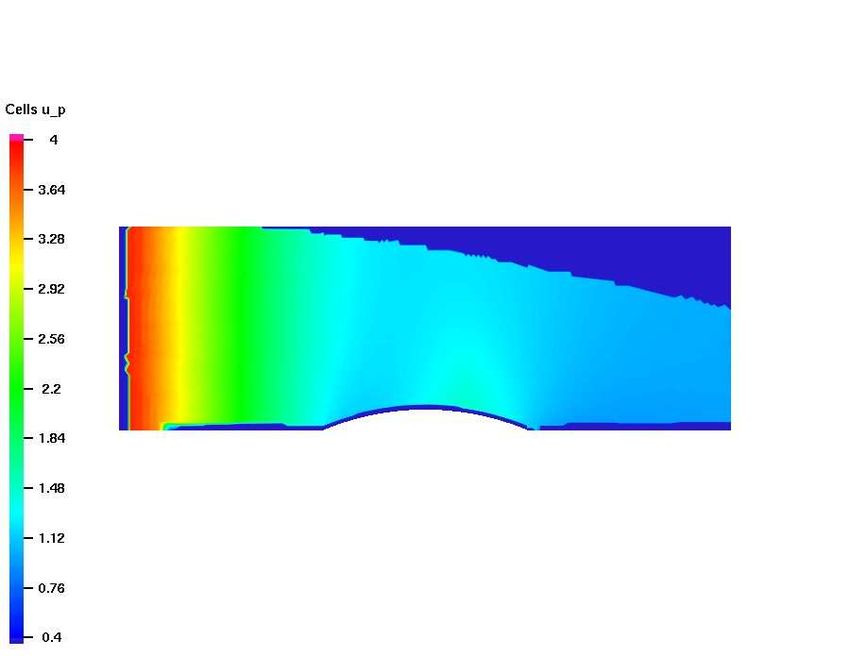
ii INHALTSVERZEICHNIS
3 Das Euler-Euler-Modell 33
3.1 Grundgleichungen des Euler-Euler-Modells . . . . . . . . . . . . . 34
3.2 Kopplung zwischen den beiden Phasen . . . . . . . . . . . . . . . 35
4 Numerische Lösung 37
4.1 Vereinfachung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.1.1 Relevanz der einzelnen Kräfte . . . . . . . . . . . . . . . . 38
4.1.2 Resultierende Bewegungsgleichung des Partikels . . . . . . 41
4.2 Triangulierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3 Implementierung . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3.1 Algorithmus . . . . . . . . . . . . . . . . . . . . . . . . . . 42
4.3.2 Berechnung der Gasströmung . . . . . . . . . . . . . . . . 44
4.3.3 Berechnung der Partikelbewegung . . . . . . . . . . . . . . 44
4.3.4 Berechnung der Partikel-Wand-Kollisionen . . . . . . . . . 59
4.3.5 Berechnung des Volumenanteils der dispersen Phase . . . . 63
5 Numerische Ergebnisse 65
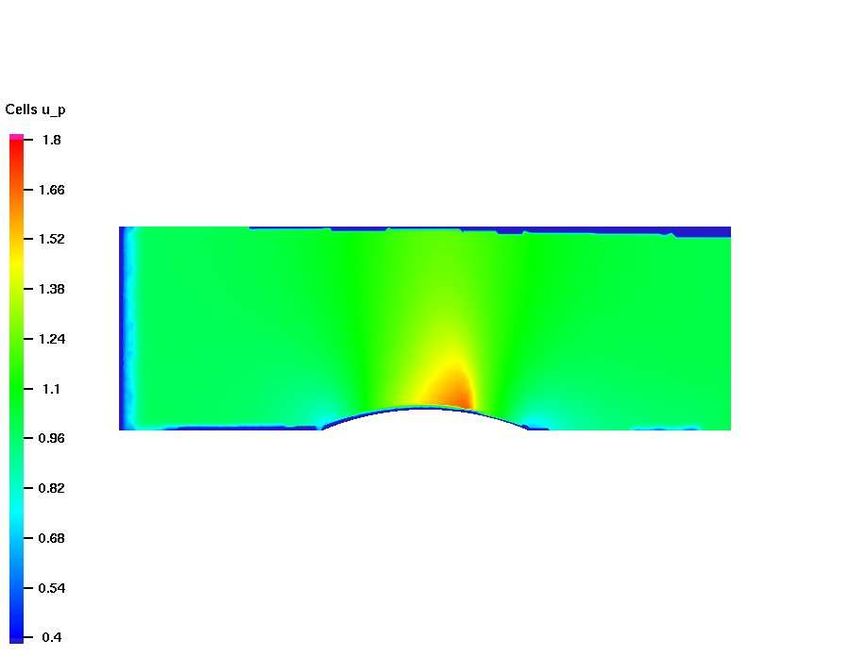
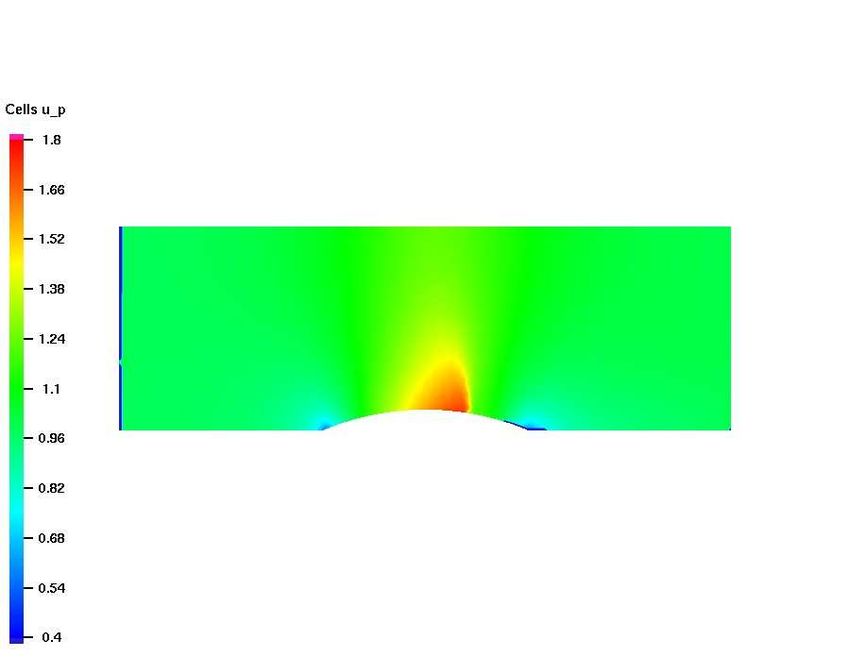
5.1 GAMM Channel . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
5.2 Compression Corner . . . . . . . . . . . . . . . . . . . . . . . . . 75
6 Zusammenfassung 83
7 Ausblick 85
Literaturverzeichnis 87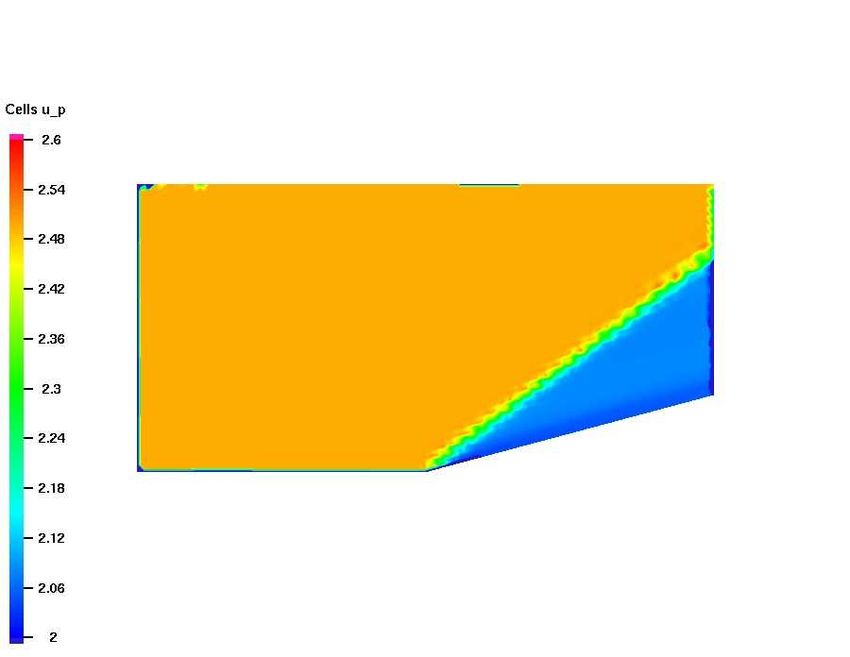
Kapitel 1
Einführung
1.1 Einleitung
Bei vielen in der Natur und Technik vorkommenden Strömungen sind zwei oder
mehr verschiedene Phasen beteiligt. Die numerische Strömungsmechanik (CFD)
beschäftigt sich unter anderem mit der Simulation von diesen Mehrphasenströmun-
gen. Liegt die eine Phase in kontinuierlicher Form vor, zum Beispiel als ein Gas,
und die andere Phase in diskreter Form, zum Beispiel in Form von Partikeln,
so bezeichnet man diese Strömung als disperse Mehrphasenströmung. Die vor-
liegende Arbeit befasst sich mit der numerischen Simulation von Gas-Partikel-
Strömungen, welche zu dieser Klasse von Strömungen zählen. Bei der in dieser
Arbeit angewandten Methode zur Simulation dieser Strömung handelt es sich
um das Euler-Lagrange-Modell. Die Algorithmen in dem verwendeten Programm
bieten die Möglichkeit, verschiedene Modelle der kontinuierichen Phase als Basis
für die Berechnung der Partikelbewegung zu nutzen. Der Schwerpunkt in dieser
Arbeit wird jedoch auf den kompressiblen Strömungen liegen. Die Berechnung
von Partikelbewegungen in kompressiblen Strömungen in Verbindung mit dem
Euler-Lagrange-Modell stellt ein bisher kaum erforschtes Gebiet der numerischen
Strömungssimulation dar. Die in den kompressiblen Strömungen auftretenden
Schocks (Unstetigkeiten) stellen eine der herausfordernden Schwierigkeiten dieser
Betrachtungsweise dar.
1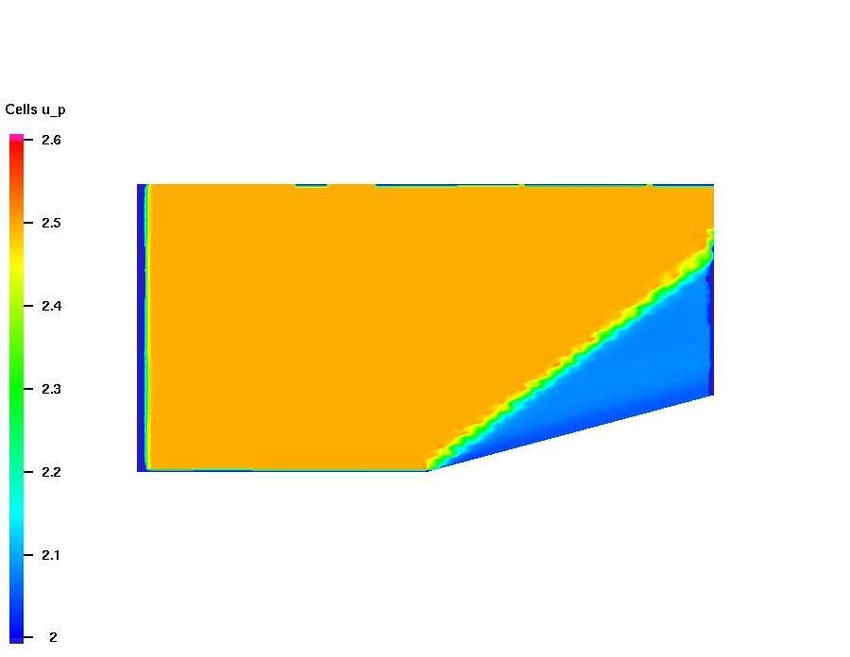
2 KAPITEL 1. EINFÜHRUNG Bei dem Euler-Lagrange-Modell wird für die fluide Phase, in unserem Fall das Gas, die Eulersche Betrachtungsweise gewählt, d.h. mit fixen Kontrollvolumina. Zur Modellierung der dispersen Phase wird die Lagrange’sche Betrachtungsweise verwendet. Man berechnet die Trajektorien der Partikel und bewegt sich aus Sicht der Partikel durch das Gasfeld. Der Abschnitt 1.2 befasst sich mit den verschiede- nen in der Natur vorkommenden Mehrphasenströmungen. Da kein einheitliches Modell für alle auftretenden Mehrphasenströmungen möglich ist, muss zunächst eine Einteilung der vorliegenden Strömung vorgenommen werden. Entsprechend dieser Einteilung muss dann das passende Modell verwendet werden. Abschnitt 1.3 liefert anschließend eine kurze Übersicht über drei häufig verwendete Modelle zur Simulation von Mehrphasenströmungen. Das in Kaptiel 2 behandelte Euler-Lagrange-Modell bildet die mathematische Grundlage für das in dieser Arbeit implementierte Programm zur Simulation von partikelbeladenen Gasströmungen. In dem verwendeten Programm bilden die kompressiblen Euler-Gleichungen die Grundlage zur Berechnung der Gas- strömung. Neben den Rand- und Anfangswerten erfolgt die Bewegung der Partikel durch die Impulsübertragung der kontinuierlichen Phase auf die disperse Phase. Bei diesem Vorgehen wird von dem zweiten Newtonschen Gesetz ausgegangen, dass die Kraft gleich der Masse mal Beschleunigung ist. Um die resultierende Kraft auf das Partikel zu erhalten, werden wir auf die verschiedenen auf das Par- tikel wirkenden Kräfte eingehen. Neben dem Einfluss des Fluids auf die Partikel, werden wir zwei Modelle für die Interaktion der Partikel untereinander kennenler- nen. Die für die Partikelbewegung wesentlichen Partikel-Wand-Stöße bilden einen weiteren Schwerpunkt in Kapitel 2. In dieser Arbeit werden wir neben dem Euler-Lagrange-Modell in Kapitel 3 ein alternatives Modell zur Modellierung von Mehrphasenströmungen kennenlernen. Bei diesem Modell werden beide Phasen mit der Eulerschen Betrachtungsweise berechnet. Das sogenannte Euler-Euler-Modell kann aus dem Euler-Lagrange- Modell hergeleitet werden, dadurch lassen sich die Ergebnisse der beiden Modelle gut miteinander vergleichen. In dem darauf folgenden Kapitel 4 wird auf die numerische Lösung des Problems eingegangen. Zur Lösung des Problems werden einige Vereinfachungen angenom- men, die man, im Unterschied zu den allgemeinen dispersen Mehrphasenströmun- gen, bei Gas-Partikel-Strömungen treffen kann. Eine Schwierigkeit stellt die Suche nach dem Element, in dem sich das Partikel befindet, dar. Ist die neue Position des
1.1. EINLEITUNG 3
Partikels berechnet, so wird entlang des Strahls zwischen der Positionen des letz-
ten Zeitschritts und des aktuellen Zeitschritts das richtige Element gesucht. Um
die Anzahl der Schritte des Suchvorgangs zu reduzieren und damit die Länge des
Suchvorgangs zu verkürzen, wird ein äquidistantes Hintergrundgitter eingeführt.
Durch dieses Hintergrundgitter wird ein näher an dem gesuchten Element liegen-
des Startelement gewählt. Als Maßstab für die Nähe eines Elements, wird der
Abstand zu dem Mittelpunkt des Elements gewählt. Sollte der Algorithmus das
Nachbarelement des gesuchten Elements liefern, was bei unstrukturierten Gittern
der Fall sein kann, so wird in den umliegenden Elementen nach dem Richtigen
gesucht.
Ist das Element gefunden, so müssen alle relevanten auf das Partikel wirkenden
Kräfte berechnet werden, um daraus die Bewegung des Partikels zu bestimmen.
Eine Schwierigkeit stellt in diesem Zusammenhang die Druckkraft dar, welcher
bei kompressiblen Strömungen, im Gegensatz zum inkompressiblen Fall, beson-
dere Beachtung geschenkt werden sollte.
Nähert sich ein Partikel der Wand des Strömungsgebiets, so muss überprüft wer-
den, ob eine Kollision des Partikels mit der Begrenzung des Strömungsgebiets
vorliegt. Zur Modellierung der Partikel-Wand-Stöße werden wir die drei verschie-
dene in dem Programm integrierten Modelle (idealer Stoß, Gleitstoß und Haft-
stoß) betrachten.
In Kapitel 5 werden zwei Beispiele ( GAMM channel“ und Compression Cor-
” ”
ner“), an denen das Programm getestet wurde, vorgestellt und die numerischen
Ergebnisse präsentiert.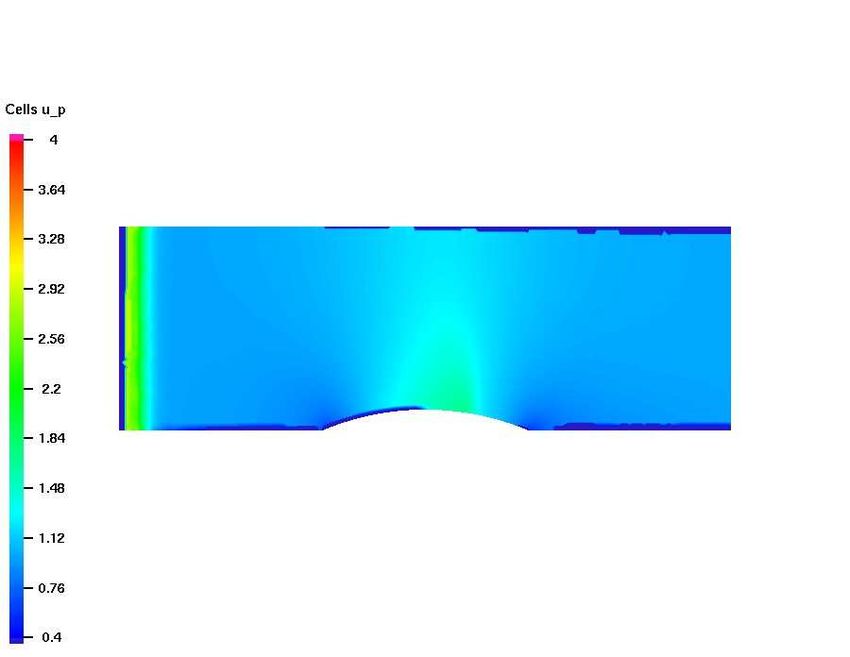
4 KAPITEL 1. EINFÜHRUNG
1.2 Kategorisierung von Mehrphasenströmungen
Dieses Kapitel beschäftigt sich mit der Unterteilung von Mehrphasenströmungen
in verschiedene Klassen. Tabelle 1.1 gibt einen Überblick über kompressible und
inkompressible in der Natur und der Technik auftretende Mehrphasenströmun-
gen. Die Unterteilung in kompressibel und inkompressibel ist dabei jeweils auf
die kontinuierliche Phase bezogen.
Vor der numerischen Behandlung von verschiedenen Mehrphasenströmungen muss
eine Klassifizierung vorgenommen werden. Diese Unterteilung ist notwendig, da
es schwer ist, für alle Arten von Strömungen einen einheitlichen Modellierungs-
ansatz zu finden. Die Ausführung richtet sich nach der Unterteilung von Frank
[6]. Dabei weist der Autor darauf hin, dass diese Unterteilung nicht ausreichend
ist, wie er anhand des Beispiels einer Gas-Flüssigkeits-Strömung zeigt, bei dem
sich der Volumenanteil ändert und dadurch Einfluss auf das Verhalten hat.
Die vielen Einflussfaktoren und die Wechselwirkung zwischen den beteiligten Pha-
sen, wie zum Beispiel die Übertragung von Masse, Impuls und Wärme sind eben-
falls hinderlich bei einer einheitlichen Modellbildung. Dies hat zur Folge, dass
die meisten Modelle nur für eine enge Klasse von Mehrphasenströmungen gelten.
Liegt die eine Phase in kontinuierlicher Form (z.B. Flüssigkeit oder Gas) und
die andere in diskreter Form (z.B. Partikel oder Tröpfchen) vor, so bezeichnet
man das Gemisch als disperse Mehrphasenströmung. Die in dieser Arbeit behan-
delten partikelbeladenen Gasströmungen gehören zu dieser Klasse von Mehrpha-
senströmungen. Ein entscheidenes Merkmal zur weiteren Klassifizierung ist der
Volumenanteil in einem betrachteten Kontrollvolumen δV der beiden Phasen.
Wenn man von i idealisierten kugelförmigen Partikeln mit dem Radius dpi aus-
geht, kann man den Volumenanteil αp der dispersen Phase durch folgende Formel
(siehe [6]) bestimmen: P π 3
i 6 dPi
αp = . (1.1)
δV
Entsprechend lässt sich der Volumenanteil αg der kontinuierlichen Phase bestim-
men:
δVg
αg = mit: αg + αp = 1 . (1.2)
δV1.2. KATEGORISIERUNG VON MEHRPHASENSTRÖMUNGEN 5
Kompressible Strömungen
Gas-Feststoff-Strömungen • verdünnte Partikelströmungen
• verdünnte Partikelströmung mit
Clusterbildung
• Strömung mit Ablagerungen
(Dünenströmung)
• Pfropfenströmung
• Dichtstromförderung
• Wirbelschichten
Gas-Flüssigkeit-Strömungen • Tropfenströmung
• Schaumströmung
• Pfropfenströmung
• Blasenströmung
Inkompressible Strömungen
Flüssigkeit-Feststoff- • Partikelströmungen analog zur
Strömungen Gasfeststoffströmung, aber mit
anderen Kräfteverhältnissen bzgl.
der Bewegung der dispersen Phase
• Aufschlämmungen (slurries)
Flüssigkeit-Flüssigkeit- • Emulsion
Strömungen • Tropfenströmung
• Pfropfenströmung
• Schichtenströmung
Tabelle 1.1: Übersicht über Mehrphasenströmungen6 KAPITEL 1. EINFÜHRUNG Als weiteres wichtiges Unterscheidungsmerkmal zwischen Gas-Partikel-Strömun- gen ist die Information, ob es sich um eine verdünnte oder dichte Strömung han- delt. Dabei wird eine disperse Mehrphasenströmung als dicht bezeichnet, wenn die Flugbahn der Partikel, neben den aerodynamischen Kräften des Gases auf das Partikel, hauptsächlich durch die Kollisionen mit den anderen Partikeln be- stimmt ist. Im Gegensatz dazu ist die Bewegung der Partikel bei verdünnten Gas-Partikel-Strömungen in erster Linie durch die aerodynamischen Kräfte des Gases auf das Partikel bestimmt. Für eine detailliertere Betrachtung sei hier auf die Arbeit von Crowe et al. [2] hingewiesen. Die in dieser Arbeit behandelten dispersen Mehrphasenströmungen beschränken sich auf verdünnte Gas-Partikel-Strömungen.
1.3. SIMULATION VON MEHRPHASENSTRÖMUNGEN 7 1.3 Simulation von Mehrphasenströmungen Dieser Abschnitt gibt einen Überblick über zwei Modelle zur Simulation von dispersen Mehrphasenströmungen. Bei diesen Modellen handelt es sich um das Euler-Euler-Modell und das Euler-Lagrange-Modell. Das Euler-Euler-Modell und das Euler-Lagrange-Modell sind weitgehend äquiva- lent zueinander (siehe Sokolichin et al. [19]). Das Euler-Euler-Modell lässt sich aus dem Euler-Lagrange-Modell herleiten. Unter gegebenen Voraussetzungen sind somit die Modelle gut miteinander vergleichbar. 1.3.1 Das Euler-Euler-Modell Wie bereits in der Einleitung beschrieben, wird für beide Phasen die Eulersche Be- trachtungsweise gewählt. Man geht also davon aus, dass es sich bei der dispersen und der kontinuierlichen Phase jeweils um ein Fluid handelt. Die beiden Fluide können sich gegenseitig durchdringen und stehen in Wechselwirkung miteinan- der. Diese Betrachtungsweise hat den Vorteil, dass der gleiche Lösungsansatz für beide Phasen verwendet werden kann, und der Rechenaufwand nicht von dem Vo- lumenanteil, bzw. der Anzahl der Partikel oder Blasen abhängt. Allerdings birgt das Modell auch einige Einschränkungen. Zum Beispiel geht die Individualität der Partikel verloren. Möchte man unterschiedliche Partikelmassen oder -durchmesser betrachten, so steigt der Rechenaufwand stark an. Dieses Modell bietet sich an, wenn der Phasenanteil der Partikelphase hinreichend groß ist. Dies hat jedoch zur Folge, dass der mittlere Partikelabstand deutlich kleiner sein muss, als die Gitterweite. Ein weiterer Nachteil tritt dann auf, wenn physikalische Effekte, wie Partikel-Wand-Stöße, eine dominierende Rolle spielen [6]. Kapitel 3 wird sich näher mit dem Modell beschäftigen.
8 KAPITEL 1. EINFÜHRUNG 1.3.2 Das Euler-Lagrange-Modell Im Gegensatz zum Euler-Euler-Modell wird die Bewegung der dispersen Phase mit Hilfe der Lagrangeschen Betrachtungsweise entsprechend der physikalischen Eigenschaften berechnet. Die kontinuierliche Phase wird nach den Grundglei- chungen der Strömungsmechanik modelliert, mit einem zusätzlichen Term, der den Einfluss der dispersen Phase auf das Fluid beschreibt. Die Bewegung der Partikel erfolgt durch die Vorgabe von Rand- und Anfangswerten und durch die Impulsübertragung des Fluides auf das Partikel. Durch Bestimmung aller auf das Partikel wirkenden Kräfte lässt sich die Flugbahn des Partikels berechnen. Ein Nachteil des Modells ist die Annahme, dass der Volumenanteil der disper- sen Phase gering ist, wodurch sich Einschränkungen in der Anwendung ergeben. Diese Annahme ist nötig, um den Rechenaufwand des Modells zu verringern. Durch den geringen Volumenanteil der dispersen Phase wird bei vielen Ansätzen von einer Ein-Weg-Kopplung ausgegegangen. Um den Rechenaufwand weiter zu reduzieren, berechnet man bei dem Euler-Lagrange-Modell nicht, wie bei einer direkten numerischen Simulation, die Flugbahn jedes einzelnen Partikels, sondern vereint mehrere Partikel zu Paketen (sog. parcels). Je mehr Partikelpakete simu- liert werden, desto größer ist der Rechenaufwand. Einen großen Vorteil hat das Modell jedoch, da man für jedes Partikel eine un- terschiedliche Masse und einen unterschiedlichen Durchmesser bei der Simulation zulassen kann. Bei dem Euler-Euler-Modell ist das zum Teil auch möglich, aller- dings steigt der Rechenaufwand dann stark an. Dies ist bei dem Euler-Lagrange- Modell, welches in dieser Arbeit verwendet wird, nicht der Fall.
Kapitel 2
Das Euler-Lagrange-Modell
Eine Möglichkeit zur Simulation von Mehrphasenströmungen bietet das Euler-
Lagrange-Verfahren. Bei diesem Modell wird die kontinuierliche Phase mit Hilfe
des Eulerschen Ansatzes berechnet, während man die Bewegung der dispersen
Phase mit Hilfe der Lagrangeschen Betrachtungsweise bestimmt. Bei diesem Ver-
fahren wird jede einzelne Trajektorie der Partikel, bzw. des Partikel-Pakets, direkt
berechnet. Durch diese Methode sind zu jedem Zeitpunkt die einzelnen Positionen
der Partikel oder Tröpfchen bekannt. Durch das Aufsummieren aller Volumina
der einzelnen Partikel lässt sich zu jedem Kontrollvolumen, bzw. an jedem Git-
terknotenpunkt, der Anteil der dispersen Phase bestimmen, welcher bei einer
Zwei-Wege-Kopplung zur Berechnung der kontinuierlichen Phase benötigt wird.
2.1 Modellierung der kontinuierlichen Phase
Neben den, in dem Programm verwendeten, kompressiblen Euler-Gleichungen
werden in diesem Abschnitt weitere Möglichkeiten zur Modellierung der kontinu-
ierlichen Phase vorgestellt. Die meisten in der Literatur vorkommenden Modelle
basieren auf inkompressiblen Gleichungen. Die in diesem Abschnitt vorgestellten
Modelle behandeln jeweils die einphasigen Gleichungen.
910 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
2.1.1 Erhaltungsgleichungen in ihrer allgemeinen Form
Dieser Abschnitt beschäftigt sich mit den allgemeinen Erhaltungsgleichungen. In
dem darauffolgenden Abschnitt wird auf die verschiedenen Modelle zur Simula-
tion von Strömungen eingegangen, welche aus den allgemeinen Erhaltungsglei-
chungen hergeleitet werden können.
2.1.1.1 Massenerhaltung
Existieren weder Massenquellen, noch -senken so gilt allgemein die Massenerhal-
tung. Die zeitliche Änderung der Dichte ρ entlang der Bahn eines Fluidelements
ist proportional zur Divergenz des Impulsfeldes [3]:
∂ρ
+ ∇ · (ρu) = 0 (2.1)
∂t
In der Gleichung steht u für die Geschwindigkeit.
2.1.1.2 Impulserhaltung
Nach dem zweiten Newtonschen Gesetz
F=ma (2.2)
lässt sich die Impulsänderung eines Fluidelements aus der Summe der darauf
wirkenden Kräfte berechnen. In Gleichung (2.2) bezeichnet F die Kraft und a die
Beschleunigung. Die integrale Form von F = m a lautet [3]:
∂
(ρu) + ∇ · (ρu ⊗ u) + ∇p + ∇ · τ − fB = 0. (2.3)
∂t
In der Gleichung steht ρ für die Dichte, u für die Geschwindigkeit, p für den
Druck und τ für den Spannungstensor. Alle Terme sind volumenbezogen (d.h.
dividiert durch das Volumen des Fluidelements). Die in dieser Gleichung auftre-
tenden Kräfte sind die Druckkraft ∇p , die Oberflächenkräfte auf Grund viskoser
Spannungen ∇ · τ und die Volumenkräfte fB . Die Volumenkräfte variieren je nach
Modell (Schwerkraft, Zentrifugalkraft, etc.).2.1. MODELLIERUNG DER KONTINUIERLICHEN PHASE 11
2.1.1.3 Energieerhaltung
Die Energiebilanz lässt sich wie folgt angeben:
∂e
+ ∇ · (u(e + p)) = ∇ · (τ u) − ∇ · q. (2.4)
∂t
In der Gleichung bezeichnet u die Geschwindigkeit, p den Druck, τ den Span-
nungstensor, q den Wärmefluss und e die Gesamtenergie [15]:
1
e = ρ² + ρu2 , (2.5)
2
mit der internen Energie ².
2.1.1.4 Algebraische Beziehungen
Die Anzahl der Unbekannten in den Gleichungen für Massen-, Impuls- und Ener-
gieerhaltung ist größer als die Anzahl der Gleichungen. Zur Schließung des Sy-
stems von partiellen Differentialgleichungen geht man von den Zustandsgleichun-
gen für ideale Gase aus:
p = ρRT, (2.6)
² = cV T. (2.7)
Außerdem brauchen wir den Spannungstensor [15]
2
τ = µ(∇u + (∇u)T ) − µ(∇ · u)I (2.8)
3
und den Wärmefluss [15]
q = −λ∇T. (2.9)
Dabei bezeichnen λ den Wärmeleitungskoeffizienten und µ die Schub- bzw. Vo-
lumenviskosität. Mit R = cP − cV bezeichnet man die Gaskonstante. In dieser
Gleichung bezeichnen cP und cV die spezifischen Wärmekapazitäten bei konstan-
tem Druck bzw. bei konstantem Volumen.
Der nächste Abschnitt beschäftigt sich mit den am häufigsten verwendeten Mo-
dellen zur Simulation von Einphasenströmungen.12 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
2.1.2 Navier-Stokes-Gleichungen
Dieser Abschnitt wird eine kurze Übersicht über die einphasigen Navier-Stokes-
Gleichungen geben. Die in Abschnitt 2.1.2.1 vorgestellten kompressiblen Navier-
Stokes-Gleichungen sind die Grundgleichungen der Strömungsmechanik und ge-
hen aus den oben beschriebenen Erhaltungssätzen hervor. Da diese Gleichungen
sehr schwierig zu lösen sind, werden Vereinfachungen angenommen. Im inkom-
pressiblen Fall sind die am häufigsten verwendeten Gleichungen die in Abschnitt
2.1.2.3 vorgestellten inkompressiblen Navier-Stokes-Gleichungen, im Gegensatz
zu dem kompressiblen Fall, in dem die in Abschnitt 2.1.2.2 vorgestellten kom-
pressiblen Euler-Gleichungen meistens verwendet werden.
2.1.2.1 Kompressible Navier-Stokes-Gleichungen
Aus den Erhaltungssätzen für Masse, Impuls und Energie erhält man die kom-
pressiblen Navier-Stokes-Gleichungen [15].
Es gilt die Massenerhaltung:
∂ρ
+ ∇ · (ρu) = 0 (2.10)
∂t
die Impulserhaltung:
∂
(ρu) + ∇ · (ρu ⊗ u) + ∇p + ∇ · τ − fB = 0, (2.11)
∂t
und die Energieerhaltung:
∂e
+ ∇ · (u(e + p)) = ∇ · (τ u) − ∇ · q. (2.12)
∂t
Diese Gleichungen sind sehr schwierig zu lösen, deswegen verwendet man verein-
fachte Modelle. Der nächste Abschnitt beschäftigt sich mit so einem Modell. Bei
den kompressiblen Eulergleichungen geht man davon aus, dass für die Viskosität
µ = 0 gilt.2.1. MODELLIERUNG DER KONTINUIERLICHEN PHASE 13
2.1.2.2 Kompressible Euler-Gleichungen
Handelt es sich um eine reibungsfreie Strömung, d.h. (∇ · τ = 0), und ver-
nachlässigt man die Wärmeleitung und die Volumenkräfte fB , so gehen die kom-
pressiblen Navier-Stokes-Gleichungen in die kompressiblen Euler-Gleichungen über:
∂ρ
+ ∇ · (ρu) = 0, (2.13)
∂t
∂
(ρu) + ∇ · (ρu ⊗ u) + ∇p = 0, (2.14)
∂t
∂e
+ ∇ · (u(ρe + p)) = 0. (2.15)
∂t
Die kompressiblen Euler-Gleichungen bilden die Grundlage zur Berechnung der
in dieser Arbeit verwendeten Gasfelder.
Die in dem nächsten Abschnitt vorgestellte Vereinfachung geht von einem in-
kompressiblen Fluid aus. Die inkompressiblen Navier-Stokes-Gleichungen werden
in der Praxis am häufigsten verwendet. Sie gelten zum Beispiel für Luftströmun-
gen weit unter der Schallgeschwindigkeit, Wasserströmungen und flüssige Metalle.
Wenn die Dichte nicht konstant ist und der Druck sich zu stark ändert, wie zum
Beispiel bei Überschallgeschwindigkeit, so treten kompressible Effekte auf und die
inkompressiblen Gleichungen können nicht mehr verwendet werden.
2.1.2.3 Inkompressible Navier-Stokes-Gleichung
Wenn es sich bei der kontinuierlichen Phase um ein inkompressibles Fluid handelt,
so reduziert sich die Gleichung (2.1) auf Grund der konstanten Dichte ( ∂ρ
∂t
=0
und ρ(x) = c) auf:
∇ · u = 0. (2.16)
Nimmt man auch eine konstante Viskosität an, so erhält man die Impulsgleichung
[3]: µ ¶
∂u
ρ + u · ∇u = −∇p + µ∇2 u + fB . (2.17)
∂t
Mit der Voraussetzung der Divergenzfreiheit des Geschwindigkeitsfeldes ∇ · u = 0
und der Energiegleichung ergibt sich ein Gleichungssystem mit vier Gleichungen
und vier zu bestimmenden Unbekannten: die drei Komponenten der Geschwin-
digkeit u und den Druck p.14 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
2.2 Modellierung der dispersen Phase
Die Berechnung der dispersen Phase erfolgt nach der Lagrangeschen Bewegungs-
gleichung. Man berechnet die Bewegung der dispersen Phase aus Sicht des Par-
tikels und bewegt sich mit dem Partikel durch das Strömungsgebiet.
2.2.1 Bewegungsgleichung des Partikels
Mit Hilfe des zweiten Newtonschen Gesetzes
d(mp up )
= Fges (2.18)
dt
lässt sich die Bewegungsgleichung des Partikels
dxp
= up (2.19)
dt
bestimmen. In den Gleichungen beschreibt xp den Ort, mp die Masse und up
die Geschwindigkeit des Partikels. Man muss für die Berechnung alle relevanten
auf das Partikel wirkenden Kräfte Fges berücksichtigen. Der nächste Abschnitt
befasst sich mit diesem Thema.
2.2.2 Kräftebilanz für die Partikelbewegung
Die in diesem Abschnitt beschriebenen Kräfte bestehen aus den aerodynamischen
Kräften (Widerstandskraft FW , Druckkraft FP , virtuelle Masse FV M , Magnus-
Kraft FM und Saffman-Kraft FS ) und der Gravitationskraft FG . Für ein Partikel
mit konstanter Masse mp = π6 d3p ρp lautet die Impulsgleichung [6]:
dup X
mp = FW + FG + FP + FV M + FM + FS + FKi . (2.20)
dt i
Die Summe über die Terme FKi beschreibt alle Volumenkräfte, die in der Formel
(2.20) nicht seperat aufgeführt werden. In den nun folgenden Abschnitten wird
näher auf die einzelnen Kräfte eingegangen.2.2. MODELLIERUNG DER DISPERSEN PHASE 15
FWz , FMz , FSz , FPz , FV Mz
FWy , FMy , FSy , FPy , FV My
FWx , FMx , FSx , FPx , FV Mx
FG
Abbildung 2.1: Kräfte, die auf ein Partikel wirken
2.2.2.1 Die Widerstandskraft
Die Widerstandskraft setzt sich zusammen aus einem Reibungs- und einen Druck-
widerstand. Auf Grund der ungleichmäßigen Druckverteilung zwischen der strom-
abwärts und der stromaufwärts gelegenen Seite des Partikels wirkt eine Kraft ent-
gegen der Partikelbewegung. Die Haftbedingung an der Oberfläche des Partikels
verursacht eine zusätzliche Bremswirkung, sie wird mit dem Reibungswiderstand
bezeichnet. Zur Berechnung der Kraft ist der Widerstandsbeiwert CW von ent-
scheidender Bedeutung. Hierbei handelt es sich um eine Approximation. Eine
direkte Berechnung wäre möglich, ist allerdings zu teuer. Der Widerstandsbei-
wert ist von der Partikel-Reynoldszahl abhängig und muss meistens mit Hilfe
von Experimenten empirisch bestimmt werden. Die Widerstandskraft lässt sich
durch folgende Gleichung berechnen [6]:
π
FW = CW ρg d2p |ug − up | (ug − up ). (2.21)
8
In der Gleichung stehen ug und up für die Geschwindigkeiten von Gas und Parti-
kel, ρg für die Gasdichte und d2p für den Partikeldurchmesser. Abschnitt 4.1.1.1 auf
Seite 38 wird sich näher mit der Berechnung des Widerstandbeiwertes beschäfti-
gen.16 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
2.2.2.2 Die Gravitationskraft
Die Schwerkraft wird durch folgenden Ausdruck beschrieben:
FG = mp g. (2.22)
Dabei beschreibt mp die Masse des Partikels und g die Schwerkraft.
2.2.2.3 Die Druckkraft
Auf Grund des lokalen Fluiddruckgradienten wirkt eine Kraft auf das Partikel.
Sie lässt sich wie folgt berechnen [6]:
mg π
FP = − ∇p = − d3p ∇p. (2.23)
ρg 6
In der Gleichung bezeichnet mg eine Masse mit dem Volumen des Partikels und
der Dichte des Fluids und p den Druck.
2.2.2.4 Die virtuelle Masse
Erfährt die disperse Phase eine Beschleunigung, so wird wegen der Haftbedingung
an der Oberfläche des Partikels ein Teil des umströmenden Fluids mitbeschleu-
nigt. Das Partikel zieht bei seiner Bewegung durch das Strömungsfeld eine Art
Schleppe (auch wake“ genannt) hinter sich her. Die Trägheit der zusätzlichen
”
Masse (in der Gleichung (2.24) mit mg bezeichnet) bremst das Partikel ab. Die
Formel zur Berechnung des Einflusses der virtuellen Masse lautet [6]:
µ ¶
dug dup
FV M = CV M mg − . (2.24)
dt dt
In der Literatur gibt es unterschiedliche Ergebnisse hinsichtlich der Größe des
CV M -Koeffizienten. Untersuchungen haben ergeben, dass in der Gleichung (2.24)
1
für starre kugelförmige Partikel CV M = 2
gilt. Für Gasblasen in der Flüssigkeit
ist die Masse der beschleunigten Flüssigkeit ungefähr halb so groß wie bei starren
Partikeln [18]. Wie bei der Widerstandskraft, handelt es sich hierbei um eine
Approximation, deren genaue Berechnung zu teuer wäre.2.2. MODELLIERUNG DER DISPERSEN PHASE 17
2.2.2.5 Die Magnus-Kraft
Mit dem Magnus-Effekt bezeichnet man die Querkraftwirkung, die ein rotierender
runder Körper in einer Strömung erfährt. Die Kraftwirkung entsteht durch einen
Druckunterschied an den beiden quer zur Strömung liegenden Seiten. Durch die
Rotation und die Haftbedingungen an der Oberfläche des Partikels wird an der
einen Seite des Partikels das Fluid beschleunigt, während es an der anderen Seite
verzögert wird. Der daraus resultierende Druckunterschied sorgt für die Kraftwir-
kung quer zur Strömungsrichtung. Neben der Rotation des Partikels ωp sind für
die Berechnung die Rotation des Partikels ωrel relativ zum Fluid [6]
1
ωrel = Ωg − ωp (2.25)
2
und die Rotation des Fluids Ωg am Partikelort [6]
Ωg = ∇ × ug (2.26)
von großer Bedeutung. Die Kraft kann dann mit Hilfe folgender Formel bestimmt
werden [6]:
π |ug − up |
FM = CM ρg d2p (ωrel × (ug − up )). (2.27)
8 ωrel
In der Gleichung steht CM für den Beiwert der Magnus-Kraft, welcher empirisch
bestimmt werden muss.
2.2.2.6 Die Saffman-Kraft
In dem Fall einer Scherströmung, d.h. die eine Seite eines Partikels wird mit ei-
ner höheren Geschwindigkeit angeströmt als die gegenüberliegende Seite, existiert
wieder einer unregelmäßige Druckverteilung. Wie bei der Magnus-Kraft resultiert
aus dem Druckunterschied eine Kraft, die quer zur Strömungsrichtung wirkt. Die
Richtung der Kraft weist dabei in Richtung der Seite mit der größeren Relativ-
geschwindigkeit zwischen Partikel und Fluid [6]:
√
1 2
νg
FS = CS ρg dp p ((ug − up ) × Ωg ) , (2.28)
4 Ωg
mit dem Beiwert der Saffman-Kraft CS , auf den hier nicht näher eingegangen
wird, und der Viskosität νg .18 KAPITEL 2. DAS EULER-LAGRANGE-MODELL 2.2.3 Partikel-Wand-Kollisionen Ist das Strömungsgebiet von festen Wänden umgeben, so haben die Wände einen großen Einfluss auf die Bewegung der dispersen Phase. Auf der Suche nach einem mathematischen Modell zur Beschreibung des Partikel-Wand-Stoßvorgangs sind die folgenden drei Faktoren von entscheidender Bedeutung [6]: Partikel- und Wandmaterial Bei einem Zusammenstoß von einem Partikel mit einer Wand entsteht, auf Grund von Deformationsarbeit und Reibung, ein Verlust an kinetischer Energie. Dabei spielt das Material des Partikels und der Wand eine entscheidene Rolle. Mittels Experimenten kann für jedes Partikel-Wand-Paar der Stoßverlustbeiwert kW und die Gleitreibungszahl fW bestimmt werden. Mit den beiden Werten lässt sich dann der Zusammenstoß eines kugelförmigen Partikels mit einer ideal glatten Wand modellieren. Wandrauhigkeit In realen Experimenten treten in der Regel keine ideal glatten Wände auf. Je nach Wandbeschaffenheit haben die Unebenheiten der Wände einen entscheidenen Ein- fluss auf die Partikelbewegung nach dem Stoßereignis. Frank [6] bezeichnet die charakteristischen Abmessungen einer Wand mit der Rauhigkeitsamplitude, bzw. Rauhigkeitstiefe Hr und der Rauhigkeitslänge Lr . Liegen diese beiden Abmessun- gen deutlich unter dem Partikeldurchmesser, so haben sie keinen entscheidenden Einfluss. Anderenfalls ist die lokale Wandneigung bei dem Stoßereignis abwei- chend von der ideal glatten Wand. Irreguläre Partikelform Weicht die Form des Partikels von der idealisierten Kugelform ab, so hat dies ebenfalls Einfluss auf das Stoßereignis. Befindet sich der Schwerpunkt des Par- tikels nicht über dem Kontaktpunkt des Partikels mit der Wand, so hat das eine veränderte Kraftwirkung bezüglich der Impulsbilanz in wandnormaler und wandtangentialer Richtung zur Folge. Bei einer irregulären Partikelform können, ähnlich wie bei Wandrauhigkeiten, überhöhte oder zu flache Rückprallwinkel auf- treten. Je nach Partikelform kann es zu einer Umwandlung von kinetischer Energie in Rotationsenergie kommen und umgekehrt.
2.2. MODELLIERUNG DER DISPERSEN PHASE 19
2.2.3.1 Stoß eines kugelförmigen Partikels mit einer ideal glatten Wand
Die Ausführungen in diesem Abschnitt gehen auf die Arbeiten von Frank [6], Tsuji
[25, 26] und Sommerfeld [21, 22] zurück. In [16] verwendet Sawatzki die Vorstel-
lung von einem unelastischen, reibungsbehafteten Stoß eines kugelförmigen Parti-
kels mit einer ideal glatten Wand. Grundlage für die Bewegungsgleichungen bieten
dabei die Impuls- und Drehimpulsgleichungen. Das Koordinatensystem wird so
gewählt, dass die y-Achse mit dem nach innen gerichteten Normalenvektor der
Wand übereinstimmt. Neben dem idealen Stoß existieren noch weitere Modelle.
Nach Tsuji [24] kann man zwischen dem Gleitstoß, bei dem das Partikel an der
Strömungsberandung entlang gleitet und dem Haftstoß, bei dem das Partikel an
der Wand entlang gleitet und vor Ende des Stoßvorgangs an der Wand zum Er-
liegen kommt, unterscheiden [6]. Der Auftreffwinkel spielt bei dem Vorgang eine
entscheidene Rolle. Es existiert ein kritischer Auftreffwinkel γkrit , bei dem der
Gleitstoß in den Haftstoß übergeht. Die folgenden Gleichungen beschreiben die
Partikelzustandgrößen vor und nach dem Stoßereignis.
(2) (2)
(1) (1)
v P , ωP
vp , ωP
γ1 γ2
ex
ey
ez
Abbildung 2.2: Partikel-Wand-Stoß
Das Superskript (1) bezeichnet die Partikelzustandsgrößen vor dem Stoß und das
Superskript (2) bezeichnet die Partikelzustandgrößen nach dem Stoß. Mit [6]
r
(1) dp (1) (1) dp (1)
|vr | = (up + ωz )2 + (wp − ωx )2 (2.29)
2 2
und
(1) (1) (1) (1)
up + d2p ωz wp − d2p ωx
²x = , ²z = (2.30)
|vr | |vr |20 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
kann man die Partikelzustandgrößen berechnen.
(1)
vp
Für − 7fW (k2W +1) ≤ |vr |
≤ 0:
Gleitstoß:
u(2) (1) (1)
p = up + ²x fW (kW + 1)vp ,
v(2) (1)
p = −kW vp ,
w(2) (1)
p = wp + ²z fW (kW + 1)vp
(1)
,
5
ωx(2) = ωx(1) − ²z fW (kW + 1)v(1)
p ,
dp
ωy(2) = ωy(1) ,
5
ωz(2) = ωz(1) + ²z fW (kW + 1)v(1)
p . (2.31)
dp
(1)
vp 2
Für |vr |
< 7fW (kW +1)
:
Haftstoß:
5 (1) dp (1)
u(2)
p = (up − ω ) ,
7 5 z
v(2)
p = −kW vp
(1)
,
5 (1) dp (1)
w(2)
p = (ωp + ω ) ,
7 5 z
2
ωx(2) = wp(1) ,
dp
ωy(2) = ωy(1) ,
2
ωz(2) = − u(1) . (2.32)
dp p
In den Gleichungen bezeichnet kW den Stoßverlustbeiwert, fW die Gleitreibungs-
zahl und vr die Relativgeschwindigkeit zwischen der Partikel- und der Wand-
oberfläche am Punkt des Partikel-Wandkontaktes. Die Werte kW und fW müssen
vorher experimentell bestimmt oder aus der Literatur entnommen werden. Der
nächste Abschnitt beschäftigt sich mit diesem Thema.2.2. MODELLIERUNG DER DISPERSEN PHASE 21
2.2.3.2 Bestimmung des Stoßverlustbeiwerts und der Gleitreibungs-
zahl
Der Stoßverlustbeiwert und die Gleitreibungszahl müssen für jede Materialpaarung
experimentell bestimmt werden. Bei den meisten Experimenten geht man von ei-
nem zweidimensionalen, ebenen Stoß aus. Ist der Auftreffwinkel kleiner als der
kritische Winkel γkrit , dann vereinfachen sich die Gleichungen (2.31) und (2.32)
und die Materialwerte kW und fW lassen sich wie folgt bestimmen [6]:
¯ ¯ ¯ ¯
¯ (2) ¯ ¯ (2) (1) ¯
¯vp ¯ ¯ up − up ¯
kW = ¯¯ ¯ ; fW = ¯ ¯ . (2.33)
(1) ¯ ¯ (1) ¯
¯vp ¯ ¯vp ¯ · (1 + kW )
Bei den Experimenten mit möglichst kugelförmigen Partikeln wird die Partikel-
geschwindigkeit in wandnormaler und wandtangentialer Richtung vor und nach
dem Stoßereignis bestimmt. Ziel ist es, eine funktionale Abhängigkeit für den
Stoßverlustbeiwert kW und die Gleitreibungszahl fW von dem Partikelauftreff-
winkel und von der Partikelauftreffgeschwindigkeit zu bekommen.
Die Tabelle 2.1 gibt einen Überblick über eine Auswahl von Versuchen mit ver-
schiedenen Materialpaarungen. Für nähere Ausführungen sei hier auf die Arbeit
von Frank [6] verwiesen.
Quelle Partikel → Wand dp kW fW
Govan [7] Glas → Kupfer 500 . . . 600µm 0.7 . . . 0.75 -
Gummi → Kupfer 600µm 0.85 . . . 0.9 -
Illyes [9] Stahl → Stahl 6mm 0.93 -
Stahl → Aluminium 6mm 0.35 -
Petrak, Michael [14] Weizen → Stahl 200 . . . 400µm 0.5 0.4
Glas → Stahl 100 . . . 160µm 0.94 0.55
Stahl → Stahl 3mm 0.55 0.15
Shaffer, Ramer [17] Glas → Aluminium 90µm 0.78 0.08
Tabelle 2.1: Empirische Ergebnisse für kW und fW22 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
2.2.3.3 Modellierung des idealen Stoßvorgangs
Sind die Materialwerte kW und fW bekannt, so ist eine einfache und genaue
Modellierung des Zusammenstoßes eines kugelförmigen Partikels mit einer ideal
glatten Wand möglich. Mit Hilfe der Gleichungen (2.31), (2.32) und der funktio-
nalen Abhängigkeiten von kW und fW lässt sich die Bewegung des Partikels durch
einen wandtangentialen und wandnormalen Stoßverlustbeiwert ersetzen [6]:
¯ ¯ ¯ ¯
¯ (2) ¯ ¯ (2) ¯
v
¯ p ¯ u
¯ p ¯
eN = ¯¯ ¯ = eN (γ1 , ~v(1) ) , e T = ¯ ¯ ~ (1)
(1) ¯ p ¯ (1) ¯ = eT (γ1 , vp ). (2.34)
¯vp ¯ ¯ up ¯
Unter Vernachlässigung der Partikelrotation und mit bekannten Materialwerten
ist also die Partikelbewegung während des Stoßvorgangs nur noch abhängig von
dem Auftreffwinkel γ1 des Partikels auf die Wand.
Neben der Einschränkung durch die Partikelrotation bietet das Modell jedoch
noch weitere Nachteile:
1. Das Modell erlaubt keine großen Parametervariationen (Partikelgrößenver-
teilung, mittlere Fluid- und Partikelgeschwindigkeiten, etc.), da sonst wei-
tere experimentelle Untersuchungen bezüglich der Materialwerte nötig sind.
2. Sehr detailliertes Wissen über Strömungsbedingungen und passendes Ver-
suchsmaterial sind nötig.
3. Je nach Partikelbeschaffenheit und Strömungsberandung kann es zu einer
starken mechanischen Beanspruchung der Wände kommen, welche in diesem
Modell nicht berücksichtigt wird.
Da der Rechenaufwand des Modells gering ist und unter den gegebenen Voraus-
setzungen eine genaue Modellierung damit möglich ist, handelt es sich bei diesem
Verfahren um das in dem Programm implementierte Modell.2.2. MODELLIERUNG DER DISPERSEN PHASE 23
2.2.3.4 Modelle zur Berücksichtigung einer irregulären Partikelform
Je nach Experiment können Stoßverlustbeiwerte von kW > 1 auftreten. Matsu-
moto und Saito [12] erklären dies durch eine von der Kugel abweichende Partikel-
form. Durch eine irreguläre Partikelform liegt im Allgemeinen der Schwerpunkt
nicht senkrecht über dem Kontaktpunkt des Partikels mit der Wand. Je nach
Partikelform ist der Abstand des Schwerpunkts zum Kontaktpunkt nicht immer
konstant. Bei größerer Exzentrität des Partikel nimmt die Wahrscheinlichkeit für
einen Stoßverlustbeiwert von kW > 1 zu. Matsumoto [12] zeigt, dass bereits bei
einem Verhältnis von η = 1.1 zwischen der längsten und der kürzesten Achse die
Wahrscheinlichkeit von fast fünfzig Prozent erreicht wird. Die Abbildung 2.3 [6]
zeigt die Kollision eines Ellipsoiden mit einer Wand.
ω1
1
0
0
1 v 2
0
1
0
1
0
1 u ω1
00000
1 1111u 2 2
1111
0000 0000000000
1111111111
00000000000
11111111111
0
1 0000000000
1111111111
00000000000
11111111111
0
1 0000000000
1111111111
00000000000
11111111111
0
1 0000000000
1111111111
00000000000
11111111111
10 v 1
0000000000
1111111111
111111111111111111111111111
000000000000000000000000000
00
11
000000000000000000000000000
111111111111111111111111111
00
11
000000000000000000000000000
111111111111111111111111111
00
11
000000000000000000000000000
111111111111111111111111111
00
11
Abbildung 2.3: Ellipsoid trifft auf Wand
Während Matsumoto in seinem Modell von rotationssymmetrischen Ellipsoiden
ausgeht, wählt Stenger [23] einen weiteren Weg der Verallgemeinerung, in dem er
auch vollständig irregulär geformte Partikel zulässt. Wegen der Komplexität steigt
der Aufwand der numerischen Berechnung der Kollision von irregulär geformten
Partikeln mit einer Wand jedoch im Verhältnis zur Genauigkeit sehr an, so dass
er nicht adäquat zu dem erzielten Gewinn an Genauigkeit erscheint [6].24 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
2.2.3.5 Das Virtuelle-Wand“-Modell nach Sommerfeld
”
Das vereinfachte Virtuelle-Wand“-Modell nach Sommerfeld [21] basiert auf den
”
Gleichungen (2.31) und (2.32) mit einem stochastisch verteilten Neigungswin-
kel γW der virtuellen Wand. In einer seiner früheren Arbeiten geht Sommerfeld
von einer Gaußverteilung mit einer Standardabweichung von δγW von 4◦ aus.
Später erweitert Sommerfeld mit seinen Kollegen Huber und Kussin dieses Mo-
dell, indem er den gaußverteilten Neigungswinkel der virtuellen Wand durch eine
stochastische Komponente ersetzt. Diese Komponente setzt sich zusammen aus
einer gaußverteilten Zufallszahl multipliziert mit der Standardabweichung einer
effektiven Rauhigkeitswinkelverteilung [6].
(2) (2)
vp , ωp
(1) (1)
vp , ωp
γW
Abbildung 2.4: Partikelkollision mit einer virtuellen Wand
Die Abbildung 2.4 [6] zeigt ein Beispiel, wie ein Partikel mit der Geschwindigkeit
(1) (1) (2)
vp und Rotation ωp auf eine Wand trifft. Die Geschwindigkeit vp und die
(2)
Rotation ωp nach dem Zusammenstoß hängt von dem Winkel der virtuellen
Wand γW ab.2.2. MODELLIERUNG DER DISPERSEN PHASE 25
2.2.3.6 Das modifizierte Virtuelle-Wand“-Modell nach Frank
”
Frank [5] entwickelte ein Modell in Abhängigkeit von Partikelgröße dp , Rauhig-
keitsamplitude Hr und deren Standardabweichung δHr sowie von der mittleren
Rauhigkeitslänge Lr . Er zeigt in seiner Arbeit, dass die angegebenen Werte der
Wandrauhigkeit und die Partikelgröße bei kleinen Auftreffwinkeln großen Einfluss
auf die Bewegung des Partikels haben.
Die Abbildung 2.5 [6] zeigt ein Beispiel, bei dem ein Partikel mit einem großen
Durchmesser auf eine rauhe Wand trifft.
dP
γ
Hr
Lr
Abbildung 2.5: Großes Partikel trifft auf die Wand
Im Vergleich dazu, zeigt Abbildung 2.6 [6] anschaulich wie ein Partikel mit einem
kleinen Durchmesser einen anderen Neigungswinkel während der Kollision mit
derselben Wand hat.
Wie bei dem Modell von Sommerfeld wird der Stoß des Partikels mit einer virtuel-
len Wand berechnet, die um den Inklinationswinkel γW zur mittleren Wandebene
geneigt ist. Der Winkel γW ist eine Zufallsgröße, die aus der Gaußverteilung mit
dem Mittelwert γW = 0 und der Standardabweichung ∆γW bestimmt wird.26 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
γ
dP
Hr
Lr
Abbildung 2.6: Kleines Partikel trifft auf die Wand
Die Standardabweichung des Inklinationswinkels ∆γW kann man wie folgt abschätzen
[6]:
arctan 2H r
für dp < Lr
Lr sin(arctan 2Hr
)
∆γW = Lr
.
arctan 2∆Hr
für dp ≥ Lr
Lr sin(arctan 2Hr
Lr )
Zur Berechnung von ∆γW müssen die Parameter der Wandrauhigkeit vorher ex-
perimentell bestimmt werden. Für die Modellierung des dreidimensionalen Stoß-
vorgangs muss man einen weiteren Winkel σa einführen. Der sogenannte Azi-
muthwinkel wird aus einer Gleichverteilung aus dem Intervall [−π, π] gewählt.
Durch σa erfährt das Partikel auch eine seitliche Ablenkung in die dritte Raum-
dimension.
Mit der folgenden Gleichung lässt sich auf einfache Weise überprüfen, ob sich das
Partikel der Wand nähert und ein physikalisch sinnvoller Stoß stattfindet [6]:
up · nv ≤ 0. (2.35)
In der Gleichung bezeichnet nv die innere Normale der Wand. Ist die Gleichung
nicht erfüllt, so kann man eine neue virtuelle Wand generieren. Mit Hilfe der vir-
tuellen Wand lässt sich dann mit den Gleichungen (2.32) und (2.31) der Partikel-
Wand-Stoßvorgang modellieren.2.2. MODELLIERUNG DER DISPERSEN PHASE 27
2.2.4 Partikel-Partikel-Kollisionen
Nach einigen allgemeinen Überlegungen bezüglich der Partikel-Partikel-Wechsel-
wirkung zu Beginn des Abschnitts werden zwei Möglichkeiten zur Modellierung
der Kollisionen vorgestellt.
2.2.4.1 Allgemeine Betrachtungen
Nimmt die Anzahl der Partikel in der Fluidströmung zu, so nimmt der mittlere
Abstand zwischen zwei Partikeln in einem Kontrollvolumen ab. Mit zunehmender
Partikelbeladung steigt somit auch die Wahrscheinlichkeit von Partikel-Partikel-
Kollisionen. Dies kann zu einer entscheidenden Beeinflussung des Strömungsver-
haltens der dispersen Phase führen. Kohnen [10] gibt für den Volumenanteil der
dispersen Phase, ab dem die Partikel-Partikel-Wechselwirkungen eine entschei-
dende Rolle spielt, einen Wert von αp > 10−3 an.
Mit der Partikelanzahldichte np beträgt das mittlere Volumen υp , das jedes Par-
tikel umgibt [6]:
1
υp = . (2.36)
np
Der mittlere Abstand zwischen den Partikeln δp lässt sich abschätzen mit [6]:
−1
δ p ∼ np 3 . (2.37)
Im Folgenden werden nur disperse Mehrphasenströmungen mit einer mittleren bis
hohen Massenbeladung und einer kleinen volumetrischen Beladung betrachtet. Ist
die Partikelanzahl pro Volumeneinheit zu hoch, so liegt eine dichte Mehrphasen-
strömung vor und die Bewegung der Partikel ist hauptsächlich von der Interaktion
der Partikel untereinander, anstatt von den aerodynamischen Kräften der konti-
nuierlichen Phase, bestimmt. Zusätzlich wird angenommen, dass die Dichte der
dispersen Phase sehr viel höher ist als die der kontinuierlichen Phase:
ρg
¿ 1. (2.38)
ρp
Mit der globalen Massenbeladung ZG lässt sich das Verhältnis von Partikel- zu
Fluidmassenstrom angeben [6]:
Ṁp
ZG = (2.39)
Ṁg28 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
Frank erwähnt als Beispiel ein Gemisch aus Kohlepartikeln und Luft mit einer
relativ hohen Massenbeladung von ZG = 10. Bei diesem Beispiel beträgt der
Volumenanteil der Partikel αp = 5 · 10−3 .
Der mittlere Abstand zwischen zwei benachbarten Partikeln ist immer noch sehr
viel größer als der charakteristische Teilchendurchmesser [6]:
δp À dp . (2.40)
Ein Partikel befindet sich somit die meiste Zeit außerhalb des Einflusses ande-
rer Partikel. Unter diesen Voraussetzungen ist ein Zusammenstoß zweier Partikel
zwar selten, er findet jedoch oft genug statt, um die Bewegung der dispersen
Phase zu beeinflussen. Die Kollision von drei Partikeln gleichzeitig ist somit noch
seltener, sodass sie im Folgenden vernachlässigt wird. Um ein Maß für die Häufig-
keit von Partikel-Partikel-Kollisionen zu bekommen, betrachtet man die mittle-
re freie Weglänge λp und die mittlere Kollisionszeit τC die das Partikel dafür
benötigt. Vergleicht man die mittlere Kollisionszeit mit der Partikelrelaxations-
zeit, so bekommt man einen Anhaltspunkt dafür, ob die Bewegung des Partikels
hauptsächlich durch die Partikel-Partikel-Kollisionen oder durch die aerodynami-
schen Kräfte des Fluids bestimmt wird. Die Partikelrelaxationszeit lässt sich wie
folgt berechnen [6]:
ρp d2p
τR = . (2.41)
18ρg ν
Liegt eine Stokessche Strömung vor, so kann man die Partikelrelaxationszeit phy-
sikalisch interpretieren als die Zeit, die ein Partikel benötigt, um aus der Ruhe-
position auf circa 63 Prozent der Fluidgeschwindigkeit beschleunigt zu werden.
Der Kehrwert dieser Kollisionszeit ist die mittlere Kollisionsrate oder Kollisi-
onsfrequenz fC , d.h. die mittlere Anzahl von Kollisionen, die ein Partikel pro
Zeiteinheit erfährt [6]:
1
fC = . (2.42)
τc2.2. MODELLIERUNG DER DISPERSEN PHASE 29
2.2.4.2 Direkte numerische Simulation der Partikel-Partikel-Kollisionen
Die direkte numerische Simulation (DNS), oder auch Deterministische Simula-
tion (DS), bezeichnet ein sehr rechenintensives Verfahren zur Berechnung der
Partikel-Partikel-Kollisionen. Bei diesem Verfahren stimmt die Anzahl der physi-
kalischen Partikel mit den modellierten Partikeln überein, somit handelt es sich
um eine direkte numerische Simulation der dispersen Phase. Zunächst werden alle
Partikeltrajektorien ohne Berücksichtigung der Kollisionen auf einem Zeitschritt
∆t berechnet. Bei diesem Schritt sollte ∆t so gewählt werden, dass diese Zeit
klein gegenüber der mittleren Kollisionszeit τC ist. Für jeden Zeitschritt muss
dann für jedes Partikelpaar überprüft werden, ob sich die beiden Partikeltrajek-
torien überschneiden und die beiden Partikel miteinander kollidieren. Liegt eine
Kollision vor, so müssen die Partikelbewegungen mittels der Impuls- und Dreh-
impulsgleichungen bestimmt werden [6]:
0 J
v1 = v1 + , (2.43)
mp1
0 J
v2 = v2 − , (2.44)
mp2
0 1 dp1
ω1 = ω1 + (n × J), (2.45)
Ip1 2
0 1 dp2
ω2 = ω2 − (n × J). (2.46)
Ip2 2
In diesen Gleichungen bezeichnet IP das Trägheitsmoment der Partikel und J den
summierten Impuls, der von dem einen Partikel auf das andere Partikel übertra-
gen wird [6]:
0 0
J = m1 (v1 − v1 ) = −m2 (v2 − v2 ). (2.47)
Durch diese Berechnung gibt die direkte numerische Simulation eine sehr rea-
litätsnahe Simulation der Mehrphasenströmung wieder. Jedes modellierte Partikel
entspricht einem physikalischen Partikel, sodass nur die Stöße modelliert werden,
welche auch physikalisch stattfinden. Der Vorteil der genaueren Approximation
geht jedoch einher mit einem sehr hohen Rechenaufwand, sodass selbst stark
verdünnte reale Strömungen mit diesem Verfahren nur mit hohen Anforderungen
an die Computerressourcen modelliert werden können. Da jeweils zwei Partikel
miteinander verglichen werden, steigt der benötigte Rechenaufwand quadratisch
mit der Anzahl der Partikel.30 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
Der hohe Rechenaufwand macht dieses Verfahren für praxisrelevante Fluid-Partikel-
Strömungen unbrauchbar. Es dient jedoch der Überprüfung einfacherer Partikel-
Partikel-Kollisionsmodelle [6].
2.2.4.3 Kollisionsmodelle für stationäre Fluid-Partikel-Strömungen
Das hier betrachtete Berechnungsverfahren wird auch als iteratives Monte-Carlo-
Verfahren (ITMCV) bezeichnet. Bei diesem Verfahren werden die einzelnen Par-
tikeltrajektorien nacheinander berechnet, so dass immer nur die Zustandsgrößen
des gerade berechneten Partikels bekannt sind. Ob zwei Partikel miteinander kol-
lidieren, wird nach einem Stoßwahrscheinlichkeitsmodell bestimmt. Dabei wird,
im Gegensatz zu dem im vorherigen Abschnitt vorgestellten Modell, die Kollision
nicht mit einem realen, sondern mit einem virtuellen Stoßpartner modelliert. Die
Kollision wird dann mittels der Impuls- und Drehimpulsgleichungen modelliert.
Den iterativen Charakter erhält dieses Berechnungsverfahren dadurch, dass die
mittleren Partikelzustandsgrößen und die Verteilungsfunktionen zu Beginn der
Berechung nicht vorliegen. Somit ist eine iterative Berechung der Partikelphase
notwendig.
Zur weiteren Betrachtung sei hier auf die Arbeit von Frank [6] hingewiesen.
2.3 Volumenanteil der dispersen Phase
Der Volumenanteil der beiden Phasen hat einen entscheidenden Einfluss auf das
Strömungsverhalten. Je größer der Anteil der dispersen Phase ist, desto größer
ist auch der Einfluss auf die kontinuierliche Phase. Der Anteil αp lässt sich mit
Hilfe folgender Formel beschreiben [6]:
P
δVp iVpi
αp = = , (2.48)
δV δV
mit einem beliebigen Kontrollvolumen δV . Für die kontinuierliche Phase lässt
sich analog definieren:
δVg
αg = mit: αp + αg = 1. (2.49)
δV
Nach Kohnen [10] hat die disperse Phase bei einem Volumenanteil von αp ≤ 10−6
keinen gravierenden Einfluss auf die Fluidströmung.2.4. PHASENWECHSELWIRKUNG 31
2.4 Phasenwechselwirkung
Es existieren verschiedene Ebenen der Phasenwechselwirkung zwischen der di-
spersen und der kontinuierlichen Phase [6]:
• Impulsübertragung
Liegt eine geringe Partikelbeladung vor, so hat die disperse Phase keinen
großen Einfluss auf das Strömungsverhalten. In diesem Fall hat nur die kon-
tinuierliche Phase einen Einfluss auf die disperse Phase, es liegt somit nur
eine sogenannte Ein-Weg-Kopplung vor. Steigt die Partikelbeladung jedoch
an, so kann man den Einfluss der dispersen Phase nicht mehr vernachlässi-
gen und es liegt eine sogenannte Zwei-Wege-Kopplung vor. Die Wechselwir-
kung beruht auf dem Impulsaustausch zwischen den beiden Phasen.
• Massen- und Wärmeübertragung
Eine weitere Möglichkeit der Phasenwechselwirkung ist der Massen- oder
Wärmeaustausch. Er kann zum Beispiel durch die Verbrennung oder Ver-
dampfung der dispersen Phase entstehen.
Der Einfluss der Phasenwechselwirkung ist also stark abhängig von dem Volumen-
anteil der dispersen Phase und der materiellen Beschaffenheit der beiden Phasen.
Bei einem Volumenanteil von 10−6 ≤ αp ≤ 10−3 kann man den Impulstransport
jedoch nicht mehr vernachlässigen.
Für weiterführende Betrachtungen zu diesem Thema sei hier auf die Arbeit von
Frank [6] hingewiesen.32 KAPITEL 2. DAS EULER-LAGRANGE-MODELL
Kapitel 3
Das Euler-Euler-Modell
Dieses Kapitel beschäftigt sich mit dem Euler-Euler-Modell. Die Grundlage für
die Gleichungen des Euler-Euler-Modells bilden die einphasigen Grundgleichun-
gen der Strömungsmechanik. Bei diesem Modell werden beide Phasen als kon-
tinuierlich betrachtet, sie können sich durchdringen und stehen in gegenseitiger
Wechselwirkung [18]. Für beide Phasen wird die Eulersche Betrachtungsweise
verwendet. Die Modellierung der Strömung erfolgt in festen Kontrollvolumina.
Im Unterschied zu dem einphasigen Modell, welches in Kapitel 2 zur Simulati-
on des Gases verwendet wurde, müssen die beiden Phasenanteile αg und αp am
Gesamtvolumen des Zweiphasengemischs berücksichtigt werden. Für die Phasen-
anteile gilt die Gleichung:
αg + αp = 1. (3.1)
In dem ersten Abschnitt werden die Grundgleichungen des Euler-Euler-Modells
vorgestellt. Bei den Erhaltungsgleichungen für die hier betrachteten Gas-Partikel-
Strömungen kann man für die Phasenanteile von αg ≈ 1 und αp ≈ 0 ausgehen.
Im Anschluss an das Kapitel werden wir uns mit der Wechselwirkung zwischen
den beiden Phasen beschäftigen.
Für eine ausführlichere Herleitung des Modells und der allgemeinen Erhaltungs-
gleichungen sei hier auf die Arbeit von Drew und Passman [4] verwiesen.
3334 KAPITEL 3. DAS EULER-EULER-MODELL
3.1 Grundgleichungen des Euler-Euler-Modells
Zur Beschreibung der Strömung benötigen wir [4, 8, 18]:
• die lokalen Geschwindigkeiten des Gases ug und der Partikel up ,
• die Volumenanteile αg und αp der beiden Phasen am Gesamtvolumen des
Zwei-Phasen-Gemischs,
• den Druck der beiden Phasen pg und pp ,
• die Energie der beiden Phasen eg und ep ,
• sowie die Dichten der beiden Phasen ρg und ρp .
Die Dichte der Partikel kann als konstant angenommen werden, im Gegensatz
zur Dichte des Gases, die bei kompressiblen Strömungen variabel ist. Für beide
Phasen gelten die Gleichungen für Impuls-, Massen- und Energieerhaltung. Be-
trachtet man eine Gas-Partikel-Strömung ohne Aggregatzustandsänderungen, oh-
ne chemische Reaktionen und ohne Massenaustausch zwischen den beiden Phasen,
so können die beiden Kontinuitätsgleichungen, welche den einphasigen Massen-
erhaltungsgleichungen entsprechen, für beide Phasen getrennt betrachtet werden
[18]:
∂(αg ρg )
+ ∇ · (αg ρg ug ) = 0, (3.2)
∂t
∂(αp ρp )
+ ∇ · (αp ρp up ) = 0. (3.3)
∂t
Unter der Annahme, dass es sich um eine reibungsfreie Strömung handelt, das
Gas sich wie ein ideales Gas verhält und die Partikel eine starre Oberfläche haben,
so dass man den Druck zwischen den Grenzflächen vernachlässigen kann, ergeben
sich die Impulsgleichungen der beiden Phasen [8]:
∂(αg ρg ug )
+ ∇ · (αg ρg ug ⊗ ug ) + αg ∇pg = −FW , (3.4)
∂t
∂(αp ρp up )
+ ∇ · (αp ρp up ⊗ up ) = FW . (3.5)
∂t
Auf Grund der Energieerhaltung gelten die Energiegleichungen [8]:
∂αg ρg eg
+ ∇ · (αg (ρg eg + pg )ug ) = −up · FW − q, (3.6)
∂t
∂αp ρp ep
+ ∇ · (αp ρp ep up ) = up · FW + q. (3.7)
∂tSie können auch lesen