Deep-Learning-basierte Baumartenklassifizierung auf Basis von multitemporalen ALS-Daten Deep Learning-based Tree Species Classification Using ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Short Paper 329 Deep-Learning-basierte Baumartenklassifizierung auf Basis von multitemporalen ALS-Daten Deep Learning-based Tree Species Classification Using Multi-temporal ALS Data Sead Mustafić, Mathias Schardt Institut für Geodäsie, Technische Universität Graz · mustafic@tugraz.at Zusammenfassung: In diesem Beitrag werden Methoden zur Baumartentrennung (Fichte, Kiefer und Laubbäume) auf Basis von multitemporalen ASL-Daten mit einem Deep-Learning(DL)-Ansatz unter Verwendung von Convolutional Neural Network (CNN) untersucht. Die Baumartentrennung wurde auf Einzelbaumbasis durchgeführt. Die erreichten Genauigkeiten für einzelne Datenepochen variieren zwi- schen 60 % und 80 %. Durch das Zusammenführen von einzelnen Ergebnissen zu einer multitempora- len Klassifikation konnte eine Genauigkeit von knapp 90 % erreicht werden. Schlüsselwörter: ALS, LiDAR, multitemporal, Baumartentrennung, Deep Learning Abstract: In this paper Deep Learning (DL) methods including Convolutional Neural Network (CNN) for tree species classification (spruce, pine and deciduous trees) are presented on the base of multi- temporal ALS data. The tree classification was performed at single tree level. The accuracies achieved for individual datasets vary between 60 % and 80 %. By combining individual results into a multi- temporal classification, an accuracy of almost 90 % could be achieved. Keywords: ALS, LiDAR, multi-temporal, tree species classification, Deep Learning 1 Motivation und Stand der Technik Aufgrund der großen Erfolge in anderen Anwendungsfeldern (Computer Vision, Robotik etc.) fanden die Deep-Learning-Ansätze auch Einzug in verschiedene Bereiche der Ferner- kundung. Ein Beispiel hierfür ist die Ableitung von forstlichen Parametern wie Baumart oder die Segmentierung einzelner Baumkronen aus ALS-Daten. Für eine Inventur in der Forstwirtschaft werden heutzutage verschiedene Fernerkundungsda- ten (Satelliten- bzw. Luftbilder oder ALS (Airborne Laser Scanning)) herangezogen und mit- einander kombiniert (Ginzler & Waser, 2017). Dabei werden in der Regel aus Luftbildern die Baumart und aus ALS-Daten die Baumhöhe abgeleitet oder die Kronen segmentiert (De- chense et al., 2016; Straub et al., 2015; Eysn et al., 2015; Mustafić et al., 2014; Buddenbaum, 2010; Heinzel et al., 2008). Abhängig von den Eigenschaften der Daten, der Baumart sowie den Wuchsbedingungen im Untersuchungsgebiet wurden Klassifizierungsgenauigkeiten zwi- schen 34 % und 95 % berichtet (Waser ,2017; Waser et al., 2011). Nur in wenigen Studien wurde jedoch eine Baumartentrennung allein anhand der ALS-Daten bzw. der daraus gewon- nenen Features durchgeführt. So haben Ørka et al. (2007, 2009) für die Trennung verschie- dener Baumarten die ASL-Intensitätswerte bzw. 3D-Strukturmerkmale einer Baumkrone verwendet und eine Klassifizierungsgenauigkeit von 74 % bzw. 77 % erreicht. Mustafić & Schardt (2019) berichten von einer ähnlichen Genauigkeit von 74 %, die mit einem Deep- Learning-Ansatz alleine anhand der Strukturparameter einer Baumkrone erreicht werden AGIT ‒ Journal für Angewandte Geoinformatik, 5-2019, S. 329-337. © Wichmann Verlag, VDE VERLAG GMBH · Berlin · Offenbach. ISBN 978-3-87907-669-7, ISSN 2364-9283, eISSN 2509-713X, doi:10.14627/537669031. Dieser Beitrag ist ein Open-Access-Beitrag, der unter den Bedingungen und unter den Auflagen der Creative Commons Attribution Lizenz verbreitet wird (http://creativecommons.org/licenses/by-nd/4.0/).
330 AGIT – Journal für Angewandte Geoinformatik · 5-2019
konnte. Durch die Kombination von Intensität und Strukturmerkmalen ist es möglich die
Klassifizierungsgenauigkeit sogar auf ca. 90 % zu steigern (Reitberger 2010; Ørka et al.,
2009). Eine umfangreiche Übersicht über Status, Potenzial, Trends, Sensoren, Algorithmen,
Herausforderungen und Perspektiven ist in Fassnacht et al. (2016) zu finden.
In Rahmen dieser Studie wurde der von Mustafić & Schardt (2019) vorgestellte auf mono-
temporalen Daten basierende Deep-Learning-Ansatz für die Klassifizierung multitemporaler
ALS-Daten erweitert. Der Fokus dieser Untersuchung lag in erster Linie darin zu prüfen, ob
durch die Verwendung von multitemporalen ALS-Daten eine bessere Genauigkeit der Baum-
artenklassifizierung erzielt werden kann. Darüber hinaus wurde der Baumkronenradius als
weiteres Merkmal für die Baumartentrennung näher untersucht (siehe Kapitel 3.3 und 4).
2 Daten und Untersuchungsgebiet
Das Untersuchungsgebiet befindet sich in der Oststeiermark (Österreich) in der Nähe von
Burgau und liegt auf eine Meereshöhe zwischen 260 und 370 Meter. Das Gebiet ist ca. 2 km
breit und 9 km lang und ist die Heimat von verschiedenen Baumarten. Die im Untersuchungs-
gebiet vorkommenden Baumarten sind Fichte, Kiefer, Lärche, Birke, Buche, Eiche, Esche
und Erle.
In der Vergangenheit wurde das Gebiet sehr oft als Untersuchungsgebiet herangezogen, wo-
raus eine Vielzahl von verschiedenen Datensätzen (Satelliten- und Luftbilder, ALS-Daten
sowie auch Felddaten) entstanden ist. Für diese Studie besonders von Bedeutung ist eine
Zeitreihe von ALS-Daten (siehe Tabelle 1), die in einer Zeitspanne von ca. 17 Jahren aufge-
nommen wurden.
Tabelle 1: ALS-Datensätze und deren Eigenschaften
Befliegung Aufgenommene Punktdichte Daten- Scan-Muster
Echos (Pkt./m2) format
1999.03.26 Last .xyz
12 – 18
1999.08.23 First .xyz
2005.07.07 First/Last 2 Raster
2009.04.03 First/Last 12 – 18 .las
2016.09.01 Bis 6 Echos 10 – 20 .las
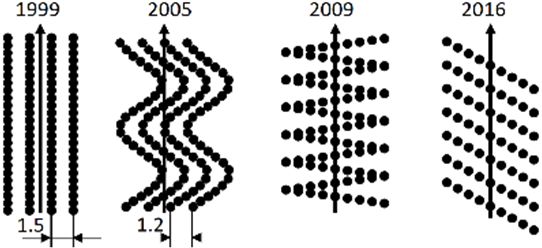
Wie aus Tabelle 1 ersichtlich, weist jede Datenepoche ihre Eigenheiten auf.
Epoche 1999 setzt sich aus zwei (Winter- bzw. Sommer-)Befliegungen zusammen (siehe
Tabelle 1). Bei der Winteraufnahme (leaf-off) wurde nur das letzte Echo und bei der Som-
meraufnahme (leaf-on) nur das erste Echo aufgenommen. Winter- und Sommeraufnahmen
wurden zu einer gemeinsamen Punktwolke zusammengeführt und im Rahmen dieser Unter-
suchung als ein Datensatz betrachtet. Wie aus Tabelle 1 (Spalte Scan-Muster) zu entnehmen
ist, wurde der Laserstahl durch die Faseroptik gestreut, wodurch ein geradliniges zueinander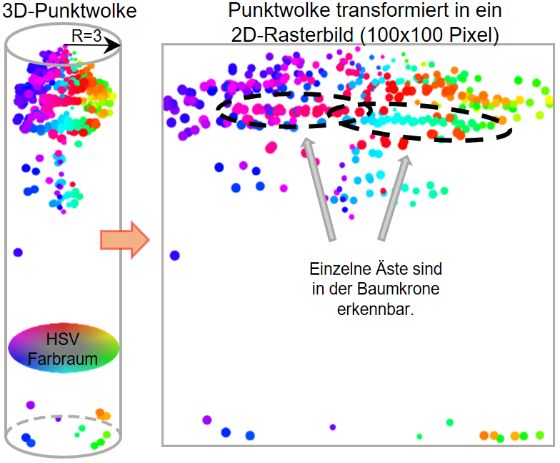
S. Mustafić, M. Schardt: Deep-Learning-basierte Baumartenklassifizierung 331 paralleles Scan-Muster am Boden entstanden ist. Bei dieser Art von Scan-Muster ist die Punktdichte in Flugrichtung viel höher als quer dazu. Bei der Epoche 1999 betrug dieser Abstand zwischen 2 Scanzeilen ca. 1.5 Meter. Durch eine 50 prozentige Überlappung der Flugstreifen wird dieser Abstand im Optimalfall halbiert. Die Daten aus der Epoche 2005 wurden im Sommer (leaf-on) aufgenommen und waren nur im Rasterformat mit einer Bo- denauflösung von einem Meter verfügbar. Pro Rasterzelle standen die Höheninformationen zur Verfügung, die das erste bzw. das letzte Echo repräsentieren. Der Laserstrahl wurde durch einen oszillierenden faseroptischen Mechanismus gestreut. Dadurch entstand ein sinusförmi- ges Scan-Muster am Boden mit einem Abstand (abhängig von der Flughöhe) von ca. 1.2 Me- ter zwischen den Aufnahmestreifen (siehe Tabelle 1, Spalte Scan-Muster). Die Epoche 2009 wurde im Frühling (teilweise belaubter Zustand) aufgenommen und stand im .las Datenfor- mat zur Verfügung. Bei der Aufnahme wurden das erste und das letzte Echo im Zick-Zack Scan-Muster (siehe Tabelle 1, Spalte Scan-Muster) aufgenommen. Die letzte Aufnahme wurde im Spätsommer 2016 aufgenommen. Im Vergleich zu den anderen drei Epochen wur- den hier bis zu sechs Echos aufgenommen. Durch eine leichte Schräglage der Aufnahme- streifen des Scan-Musters (siehe Tabelle 1, Spalte Scan-Muster) konnte eine gleichmäßige Punktdichtenverteilung in Flugrichtung sowie auch quer dazu erreicht werden. Da bei jeder Befliegung eine andere Aufnahmeplattform (Laserscanner, GPS- und IMU- Einheit) und Flughöhe verwendet wurde, unterscheiden sich die aufgenommenen ALS-Daten bezüglich der Punktdichte, Genauigkeit und Scanmuster deutlich voneinander. Darüber hin- aus wurden die Daten zu verschiedenen Jahreszeiten (Winter bzw. Sommer) erfasst. 3 Datenvorverarbeitung und Klassifikation Voraussetzung für eine erfolgreiche Bearbeitung multitemporaler Datensätze ist eine präzise Vorverarbeitung der Daten sowie die Überführung der ALS-Punktwolkendaten in eine be- stimmte Rasterform. Die näheren Schritte dazu sind in den folgenden Kapiteln genauer be- schrieben. 3.1 Datenvorverarbeitung Im ersten Vorverarbeitungsschritt wurden die ALS-Punktwolken auf Ausreißer und Daten- lücken überprüft und diese bereinigt. Anschließend folgte eine Einzelbaumdetektion (EBD, Suche von lokalen Maxima), bei der die Spitzen der einzelnen Bäume jeweils für jede Epoche detektiert und mit den Eigenschaften Position und Höhe gelabelt wurden (Mustafić et al., 2014; Reitberger et al., 2010). Die auf diese Weise gewonnenen Baumspitzen stellen Baum- kandidaten dar und werden im weiteren Verlauf als Mittelpunkt eines Baumes betrachtet. Aufgrund von Doppelkronen oder im Fall von Laubbäumen mit ihrer komplexen Kronen- form kann es vorkommen, dass ein Baum doppelt oder mehrfach detektiert wird. Wie bereits in Kapitel 2 beschrieben, unterscheiden sich die Datenepochen sehr stark vonei- nander, wobei neben den bereits erwähnten Unterschieden der Daten und den daraus resul- tierenden Herausforderungen noch ein räumlicher Lageversatz zwischen den Epochen (be- sonders älteren Epochen) als weitere Herausforderung auftritt. Der Lageversatz zwischen den Datensätzen betrug teilweise bis zu 3.5 Meter. Die Korrektur dieses Versatzes wurde mit der in Mustafić & Schardt (2018) vorgestellten Methode durchgeführt. Damit war es möglich,
332 AGIT – Journal für Angewandte Geoinformatik · 5-2019
die Versatzkorrektur korrespondierender Bäume (gleicher Baum) durch alle Epochen zu be-
rechnen und anzubringen. Die Verknüpfung von einem Baum durch alle Epochen bietet nicht
nur die Möglichkeit, die Entwicklung eines Baumes im Laufe der Jahre zu beobachten, son-
dern stellt auch eine große Hilfestellung bei der Erhebung von Trainings-, Validierungs-, und
Testdaten dar (siehe Kapitel 3.1.1). So kann beispielsweise die Baumart nur einmal in einer
beliebigen Epoche definiert und in einem weiteren Schritt an die korrespondierenden Bäume
(der gleiche Baum) durch alle Epochen weitervererbt werden.
Für die Baumartenklassifizierung wurde ein in Mustafić & Schardt (2019) vorgestellter
Deep-Learning-Ansatz gewählt. Da dieser Ansatz Rasterdaten voraussetzt, wurden die
Punktwolkendaten bzw. die (x, y, z) Koordinaten eines Baumes in ein Rasterbild transfor-
miert. Dazu wurden mehrere Radien (R = [1, 1.5, 2, 3, 4, 5, 6] Meter) um eine Baumspitze
festgelegt, die die Baumkronenumrisse darstellen sollen. Auf diese Weise ist für jedes Radi-
ussegment ein Rasterbild entstanden, das einen Baum bzw. Teile eines Baums repräsentiert.
Beschreibendes Merkmal für die verschiedenen Baumradien ist ein als Rasterbild dargestell-
tes Baumprofil. Das Baumprofil (2D) beschreibt sowohl die vertikalen als auch die horizon-
talen Eigenschaften einer Baumkrone (Abb. 1). Unter dem Baumprofilbild ist die Generie-
rung von Profilsichten einer Baumkrone zu verstehen.
Abb. 1:
Profildarstellung einer Baumkrone in einem
2D-Farbbild. Die Punkte wurden in Abhän-
gigkeit von deren Ausrichtung in Bezug auf
die Baumspitze eingefärbt. Dadurch kom-
men bestimmte Strukturen in der Baumkro-
ne zum Vorschein.
In Abbildung 1 sind die 3D-Punkte einer Baumkrone in einer Profilsicht durch Symbole
(kleine Kreise) farblich dargestellt. Die Farbe (im HSV-Farbraum) wird in Abhängigkeit von
der Ausrichtung des Punktes in Bezug auf die Baumspitze vergeben. Durch das Einfärben
der Punktwolke sollen bestimmte Verzweigungen und Verästelungsformen in der Baum-
krone zum Vorschein kommen (Abb. 1), woraus das Modell bestimmte geometrische Merk-
male für die Klassifizierung herausfinden soll. Um die Anzahl der Bilder zu erhöhen, wurde
jeder Baum in Schritten von 45° gedreht und dadurch mit dem sog. 3D Multi-View (Gao et
al., 2018) weitere Profilsichten generiert. Die auf diese Weise aufbereiteten Profilsichten ei-
nes Baumes wurden dann als ein Farb-Rasterbild mit der Auflösung von 100 × 100 Pixel und
drei Kanälen als Inputdatensatz für das CNN verwendet.S. Mustafić, M. Schardt: Deep-Learning-basierte Baumartenklassifizierung 333
3.1.1 Datensätze für Training, Validierung und Tests
Die Erhebung der Referenzdaten (ground truth) wurde manuell am Bildschirm anhand von
hoch aufgelösten Infrarot- und RGB-Orthophotos mit einer Bodenauflösung von 50 cm bzw.
9 cm durchgeführt. Dabei wurde zu jeder automatisch detektierten Baumspitze die entspre-
chende Baumart (label) zugewiesen. Im Rahmen dieser Untersuchung wurde eine Klassifi-
zierung in drei verschiedene Baumarten bzw. Baumartenklassen (Fichte, Kiefer und Laub-
bäume) durchgeführt, wobei sich die Klasse „Laubbäume“ aus den Baumarten Buche, Birke,
Eiche, Esche und Erle zusammensetzt.
Für das Training und die Optimierung des CNNs sowie eine abschließende Qualitätskontrolle
wurden die im Vorfeld erhobenen Referenzdaten in Trainings-, Validierungs- und Testdaten-
sätze aufgeteilt.
In der Summe besteht der Trainings- und Validierungsdatensatz aus jeweils 500 Bäumen
jeder Klasse, die im Verhältnis 80 % zu 20 % zufällig aufgeteilt und in der Modellbildungs-
phase verwendet wurden. Die abschließende Qualitätskontrolle erfolgte mit einem unabhän-
gigen Testdatensatz, der aus jeweils 270 Bäumen pro Klasse besteht und nicht für die Trai-
ningsphase verwendet wurde.
Damit eine differenzierte Analyse der Klassifizierungsergebnisse möglich ist, wurde der
Testdatensatz in die folgenden drei Kategorien unterteilt:
ein Viertel der Bäume stammt aus demselben Waldbereich wie die Trainingsdaten;
ein weiteres Viertel der Bäume stammt aus benachbarten Waldbereichen und weist ähn-
liche Eigenschaften wie die Trainingsdaten auf;
die verbliebene Hälfte der Bäume stammt ebenfalls aus benachbarten Waldbereichen,
die Waldstruktur unterscheidet sich jedoch von den Trainingsdaten hinsichtlich der
Baumdichte, Mischverhältnisse und der Kronenform der Laubbäume.
In allen Datensätzen wurden nur Bäume aus der mittleren und oberen Waldschicht herange-
zogen, da die Bäume aus der unteren Schicht in den Daten nicht sichtbar sind und somit eine
erfolgreiche Klassifizierung von vorneherein ausgeschlossen werden kann.
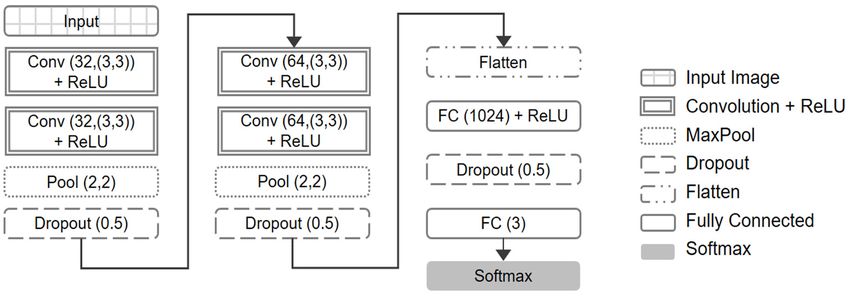
3.2 CNN-Architektur
Für die Klassifikation der Baumarten wurde ein CNN-Modell trainiert. Die Netzarchitektur
(Abbildung 2) wurde vollständig aus Mustafić & Schardt (2019) übernommen und nur Hy-
perparameter, die der Abbildung 2 entnommen werden können, optimiert. Als Optimizer
wurde der RMSprop mit einer learning rate von 0.0001 und decay von 1e-6 verwendet. Die
maximale Anzahl von Epochen wurde auf 100 gesetzt, wobei in den meisten Fällen das Mo-
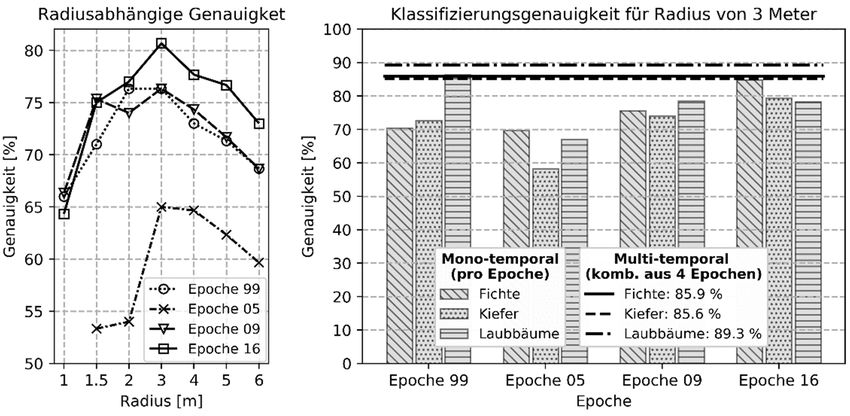
dell früher konvergierte und durch early stopping das Training automatisch gestoppt wurde.334 AGIT – Journal für Angewandte Geoinformatik · 5-2019 Abb. 2: CNN-Architektur 3.3 Klassifikation Wie in Kapitel 3.1.1 bereits beschrieben, wurde eine Baumkrone bzw. Teile der Baumkrone durch mehrere Radien (1, 1.5, 2, 3, 4, 5, 6 Meter) um die Baumspitze herum definiert und anschließend die Klasse bzw. Baumart (mit dem davor trainierten CNN-Modell) für jeden Radius geschätzt. In der Studie von Mustafić & Schardt (2019) wurde die endgültige Klasse eines Baumes durch die Kombination von Wahrscheinlichkeiten, die aus der mono-tempora- len Klassifizierung einzelner Radien stammen, ermittelt. Im Rahmen dieser Studie wurde eine umfangreiche statistische Untersuchung mit den Daten aus allen vier Epochen vorge- nommen. Dabei wurde jeweils für jeden Radius ein CNN-Modell zuerst trainiert und an- schließend evaluiert (siehe Abb. 3 links). Als Ergebnis dieser Analyse konnte ein optimaler Radius für alle Epochen gefunden werden. Die Klassifizierung der Baumarten erfolgte dann in einem weiteren Schritt ausschließlich anhand des optimalen Radius (R=3 Meter). Durch eine weitere Kombination der Klassifizierungsergebnisse (Wahrscheinlichkeiten) der einzel- nen Epochen zu einer multitemporalen Klassifizierung wird die endgültige Klasse eines Bau- mes ermittelt. 4 Ergebnisse und Diskussion In Abbildung 3 (links) sind die Mittelwerte der Klassifizierungsgenauigkeiten für verschie- dene Radien (1, 1.5, 2, 3, 4, 5, 6 Meter) für alle vier Epochen dargestellt. Daraus ist deutlich zu erkennen, dass der Radius von drei Metern in allen Epochen ein Optimum darstellt. Bei einem zu kleinen Radius werden die baumspezifischen Eigenschaften nicht ausreichend er- fasst, wohingegen bei zu großem Radius Merkmale benachbarter Bäume in die Berechnung einfließen. Bei der Epoche 2005 ist die Genauigkeit aufgrund der zu geringen Punktdichte grundsätzlich für alle Radien geringer.
S. Mustafić, M. Schardt: Deep-Learning-basierte Baumartenklassifizierung 335
Abb. 3: Mittlere Klassifizierungsgenauigkeit der Untersuchung von Radien (links) und Ein-
zelergebnisse der Klassifizierung mit dem optimalen Radius (R = 3 Meter) für die
jeweilige Epoche (rechts, Balken) sowie das Gesamtergebnis der multitemporalen
Klassifikation (rechts, Linien)
In Abbildung 3 (rechts) ist die Genauigkeit pro Klasse (Fichte, Kiefer, Laubbäume) jeweils
separat für alle Epochen und für die Kombination aller vier Epochen dargestellt. Betrachtet
man die Einzelergebnisse der Epochen, ist deutlich zu erkennen, dass in der Epoche 2016 die
beste Genauigkeit (ca. 80 %) erreicht wurde. Geringfügig schlechtere Genauigkeiten konnten
in den Epochen 2009 bzw. 1999 erzielt werden (ca. 75 % bzw. 70 %). Mit einer durchschnitt-
lichen Genauigkeit von 60 % konnten die Bäume in der Epoche 2005 aufgrund der geringe-
ren Punktdichte der zugrunde liegenden Daten deutlich schlechter klassifiziert werden. Die
Gegenüberstellung der Genauigkeiten für die einzelnen Baumarten zeigt, dass die Fichte am
besten in der Epoche 2016 trennbar ist, wohingegen die Klassifizierung der Kiefer in allen
Epochen im mittleren Genauigkeitsbereich liegt. Die Laubbäume zeigten die besten Klassi-
fizierungsergebnisse in der Epoche 1999, obwohl dieser Datensatz hinsichtlich Punktdichte
und Punktverteilung um einiges schlechter ist als z. B. die Epoche 2016. Eine mögliche Be-
gründung dafür ist, dass die Daten dieser Epoche aus Winter- bzw. Sommerbefliegung zu-
sammengeführt wurden (siehe Kapitel 2), und dadurch die spezifischen Merkmale eines
Laubbaumes in belaubtem (leaf-on) bzw. unbelaubtem (leaf-off) Zustand zur besseren Klas-
sifizierung beigetragen haben.
Wie in Kapitel 3.3 beschrieben, wurden die Wahrscheinlichkeiten aus einzelnen Epochen zu
einer multitemporalen Klassifizierung kombiniert. Dadurch konnte die Genauigkeit um ei-
nige Prozentpunkte für jede Klasse gesteigert werden (Abbildung 3 rechts, Linien), sodass
eine Gesamtgenauigkeit (aus allen vier Epochen) für Fichte und Kiefer von knapp 86 % und
für Laubbäume sogar 89 % erreicht werden konnte.336 AGIT – Journal für Angewandte Geoinformatik · 5-2019 5 Fazit und Ausblick In dieser Untersuchung wurde eine Klassifikation von Baumarten (Fichte, Kiefer, Laub- bäume) anhand von multitemporalen ALS-Daten auf Einzelbaumbasis anhand eines CNN- Modells durchgeführt. Hierfür wurden die Baumkronen, ausgehend von den automatisiert detektierten Kronenspitzen, in unterschiedliche Baumsegmente unterteilt, indem Radien von 1, 1.5, 2, 3, 4, 5, 6 Meter gebildet wurden. Von einer automatischen Segmentierung der Baumkronen wurde abgesehen, da die dabei auftretenden Fehler die Klassifizierungsergeb- nisse negativ beeinflussen können. Dies gilt besonders für dichte Waldbestände oder Laub- baumbestände. Es hat sich gezeigt, dass in allen vier Epochen mit einem Baumkronenseg- mentradius von drei Metern die beste Genauigkeit erreicht werden konnte. Darüber hinaus war es durch die multitemporale Klassifikation möglich, die jeweils pro Epoche erreichten Genauigkeiten im Bereich zwischen 60 % und 80 % auf etwa 90 % zu steigern. Die mit dem Deep-Learning-Ansatz erzielten Ergebnisse sind sehr zufriedenstellend, zumal sie alleine auf geometrischen Merkmalen der Baumkronen (x, y, z Werte) basieren. Da be- reits einige 3D-Netzarchitekturen für Punktwolkendaten existieren, wäre ein Vergleich des hier vorgestellten Ansatzes mit einem auf Punktwolken basierenden Ansatz sehr interessant. Damit könnte der etwaige Informationsverlust durch die Rasterung der Punktwolkendaten quantifiziert werden. Ein weiterer Ansatz, der in den darauffolgenden Untersuchungen unter die Lupe genommen werden soll, ist die Kombination der hier verwendeten geometrischen Information mit weiteren Features, die aus ALS-Intensitätswerten oder Luftbildern abgelei- tet werden können. Literatur Buddenbaum, H. (2010). Charakterisierung von Forstbeständen mit Hilfe von Laserscan- ning und Reflexionsmodellierung (PhD Thesis). Universität Trier. Dechesne, C., Mallet, C., Le Bris, A., Gouet, V., & Hervieu, A. (2016). Forest Stand Segmen- tation Using Airborne LIDAR Data and Very High Resolution Multispectral Imagery. Int. Arch. Photogramm. Remote Sens. Spatial Inf. Sci. XLI-B3, 207–214. Eysn, L., Hollaus, M., Lindberg, E., Berger, F., Monnet, J. M., Dalponte, M., Kobal, M., Pel- legrini, M., Lingua, E., Mongus, D., & Pfeifer, N. (2015). A Benchmark of Lidar-Based Single Tree Detection Methods Using Heterogeneous Forest Data from the Alpine Space. Forests, 6(12), 1721–1747. Fassnacht, F. E., Latifi, H., Stereńczak, K., Modzelewska, A., Lefsky, M., Waser, L. T., Straub, C., & Ghosh, A. (2016). Review of studies on tree species classification from remotely sensed data. Remote Sensing of Environment, 186, 64–87. Gao, Z., Wang, D., He, X., & Zhang, H. (2018). Group-Pair Convolutional Neural Networks for Multi-View Based 3D Object Retrieval. AAAI Conference on Artificial Intelligence. Ginzler, C., & Waser, L.T. (2017). Entwicklungen im Bereich der Fernerkundung für forst- liche Anwendungen. Schweizerische Zeitschrift für Forstwesen, 168 (3), 118–126. DOI: 10.3188/szf.2017.0118.
S. Mustafić, M. Schardt: Deep-Learning-basierte Baumartenklassifizierung 337
Heinzel, J. N, Weinacker, H., & Koch, B. (2008). Full automatic detection of tree species
based on delineated single tree crowns – a data fusion approach for airborne laser scan-
ning data and aerial photographs. SilviLaser 2008, Sept. 17-19, Edinburgh, UK (pp. 76–
85).
Mustafić, S., Kainer, A., & Schardt, M. (2014). Einzelbaumdetektion anhand von Ebenen-
schnitten. In: Strobl, J. et al. (Eds.), Angewandte Geoinformatik 2014. Beiträge zum 26.
AGIT-Symposium (pp. 21–26). Berlin/Offenbach: Wichmann.
Mustafić, S., & Schardt, M. (2018). Versatzkorrekturen von Multitemporalen ALS-Daten.
AGIT ‒ Journal für Angewandte Geoinformatik, (4), 53–58.
Mustafić, S., & Schardt, M. (2019). Deep Learning-basierte Baumartenklassifizierung auf
Basis von ALS-Daten. Dreiländertagung der DGPF, der OVG und der SGPF, Wien, Aus-
tria, 2019, 20.-22. Februar.
Ørka, H. O., Næsset, E., & Bollandsås, O. M. (2007). Utilizing Airborne Laser Intensity for
Tree Species Classification. ISPRS Workshop on Laser Scanning 2007 and SilviLaser
2007, IAPRS Vol. XXXVI, Part 3/W52 (pp. 300–304).
Ørka, H. O., Næsset, E., & Bollandsås, O. M. (2009). Classifying species of individual trees
by intensity and structure features derived from airborne laser scanner data. Remote Sen-
sing of Environment, 113(6), 1163–1174.
Reitberger, J. (2010). 3D-Segmentierung von Einzelbäumen und Baumartenklassifikation aus
Daten flugzeuggetragener Full Waveform Laserscanner (PhD Thesis). Technische Uni-
versität München.
Straub, C., Stepper, C., Seitz, R., & Waser, L. T. (2015). Amtliche Fernerkundungsdaten in
der Forstwirtschaft – Anwendungspotential in Bayern.
DOI:10.13140/RG.2.1.4891.2724.
Waser, L. T. (2017). Baumartenerkennung mit Luftbildern. LWF aktuell, (4), 19–21.
Waser, L. T., Ginzler, C., Kuechler, M., Baltsavias, E., & Hurni, L. (2011). Semi-automatic
classification of tree species in different forest ecosystems by spectral and geometric var-
iables derived from Airborne Digital Sensor (ADS40) and RC30 data. Remote Sensing of
Environment, 115(1), 76–85. DOI:10.1016/j.rse.2010.08.006.Sie können auch lesen

















































