FRIEDRICH-ALEXANDER-UNIVERSITÄT ERLANGEN-NÜRNBERG - Lehrstuhl für Informatik 10 (Systemsimulation) Batteriesimulation und Optimierung für ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
FRIEDRICH-ALEXANDER-UNIVERSITÄT ERLANGEN-NÜRNBERG
TECHNISCHE FAKULTÄT • DEPARTMENT INFORMATIK
Lehrstuhl für Informatik 10 (Systemsimulation)
Batteriesimulation und Optimierung für Solarzeppeline
Veit Götz
BachelorarbeitBatteriesimulation und Optimierung für Solarzeppeline
Veit Götz
Bachelorarbeit
Aufgabensteller: Prof. Dr. C. Pflaum
Betreuer: Prof. Dr. C. Pflaum
Bearbeitungszeitraum: 28.09.2021 – 28.02.2022Erklärung: Ich versichere, dass ich die Arbeit ohne fremde Hilfe und ohne Benutzung anderer als der angege- benen Quellen angefertigt habe und dass die Arbeit in gleicher oder ähnlicher Form noch keiner anderen Prüfungsbehörde vorgelegen hat und von dieser als Teil einer Prüfungsleistung angenom- men wurde. Alle Ausführungen, die wörtlich oder sinngemäß übernommen wurden, sind als solche gekennzeichnet. Der Universität Erlangen-Nürnberg, vertreten durch den Lehrstuhl für Systemsimulation (Infor- matik 10), wird für Zwecke der Forschung und Lehre ein einfaches, kostenloses, zeitlich und örtlich unbeschränktes Nutzungsrecht an den Arbeitsergebnissen der Bachelorarbeit einschließlich etwaiger Schutzrechte und Urheberrechte eingeräumt. Erlangen, den 28. Februar 2022 ......................................
Abstract
Ziel dieser Bacherlorarbeit ist es, zu beantworten, ob ein solarbetriebenes Luftschiff durch geeignete
Batterienutzung möglich wäre. Hierzu sollen folgende Fragestellungen beantwortet werden: Reicht
die Leistung eines rein solarbetriebenen Luftschiffs für Mittel- und Langstrecken aus, wie sind der
Akku und die Solarzellen zu dimensionieren und optimieren, welche Strategien können bei starken
Leistungsspitzen und niedrigem Ladestand angewandt werden und mit welchen Fahrzeiten kann
grob gerechnet werden?
Um diese Fragen zu beantworten, wurde eine Simulationssoftware für Solarzeppeline angepasst,
erweitert und mit verschiedenen Parametern getestet. Hierbei wurden physikalische Gesetzmäßig-
keiten zu Grunde gelegt und implementiert. Es wurden Leistungskennzahlen von vorhandenen Luft-
schiffen, Akkus und Solarzellen herangezogen.
Die Simulationen zeigten, dass ein solarbetriebenes Luftschiff nach derzeitigem technischen Entwick-
lungsstand grundsätzlich möglich ist. Es ist mit einer Leergewichtsreduktion gegenüber historischen
Luftschiffen zu rechnen. Die Fahrzeit lässt sich durch eine optimierte Batterienutzung und Aus-
nutzung der Solarzellen erheblich reduzieren und es ist mit einem niedrigeren CO2 Ausstoß als bei
Flugzeugen zu rechnen, jedoch spielt das Wetter eine große Rolle.
Die Ergebnisse zeigen, dass die richtige Wahl der Batterie und Solarzellen sowie deren Nutzungs-
strategien einen entscheidenden Einfluss auf die Effizienz solarbetriebener Luftschiffe haben. Auf
Grundlage dieser Ergebnisse ist es empfehlenswert, bei der Planung und Konzeptionierung von
Prototypen einen genauen Blick auf diese Bereiche zu werfen.
4Inhaltsverzeichnis
1 Einleitung 6
2 Anforderungen 7
3 Simulationsumgebung 8
3.1 Veränderte XML Parameter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3.2 Automatisierte Simulationsdurchläufe . . . . . . . . . . . . . . . . . . . . . . . . . . 8
4 Aufbau der Zeppelinhülle 10
4.1 Aufbau aus Datei . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
4.2 Berechnung des Schattenwurfs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4.3 Plazierung der Solarzellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
4.4 Auftrieb und Fahrthöhe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
5 Batteriesimulierung 16
5.1 Restrictions . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
5.2 Geschwindigkeitsberechnung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
6 Optimierung der Batterienutzung 18
6.1 Batteriedimensionierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
6.2 Restentladung vor Erreichen des Ziels . . . . . . . . . . . . . . . . . . . . . . . . . . 19
6.3 Leistungsreduktion bei niedrigem Ladestand . . . . . . . . . . . . . . . . . . . . . . . 21
7 Weitere Optimierungen 22
7.1 Solarbedeckung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7.2 Größe und Form des Zeppelins . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
7.3 Abfahrzeit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
8 Zusammenfassung 25
8.1 Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
9 Literaturverzeichnis 26
51 Einleitung
Der Luftverkehr ist für 8,8% der globalen CO2 Emissionen verantwortlich [1]. Mit durchschnittlich
g
123 pkm CO2 ist Fliegen per Flugzeug im weltweiten Durchschnitt bis zu 14 mal schädlicher als
g
aktuelle Luftschiffe, welche auf einen CO2 Ausstoß von knapp 11 pkm kommen [2]. Somit liegen
Luftschiffe im Passagierbereich im Effizienzbereich von Zügen [3]. Luftschiffe besitzen eine große
Oberfläche und die Entwicklung im Bereich der Foliensolarzellen und Akkumulatoren hat in den
letzten Jahren durch den zunehmenden Ausbau der erneuerbaren Energien und der Elektrifizierung
des Verkehrssektors große Fortschritte ermöglicht [4][5]. Diese Entwicklungen ermöglichen es Luft-
schiffe, deren Effizienz stark vom Gewicht abhängt, mit auf dem Luftschiff erzeugter Solarenergie zu
betreiben. Da diese in Relation zur Tages- und Jahreszeit sowie zur Fahrtrichtung stark schwankt,
ist ein gutes Batteriemanagement und passende Auslegung des Akkus unabdingbar. Ein zu groß
dimensionierter Akku vermindert die Nutzlast des Luftschiffs, wobei ein zu klein dimensionierter
Akku die Effizienz mindert oder gar eine Strecke unpassierbar machen kann. Um mit der Luftfahrt
konkurrieren zu können, ist zudem eine schnelle Fahrt und dadurch bedingt eine effiziente Akku-
nutzung von Nöten. Es stellt dich daher die Frage, wie ein solarbetriebenes Luftschiff prinzipiell
umsetzbar wäre, welche Kenngrößen für die Solarzellen als auch für die Batterie zu erwarten wären
und wie sich die Nutzung der Batterie optimieren lässt.
62 Anforderungen
1. Implementierung der Batterie
Die Batterie sollte als C++ Klasse in den bisherigen Code integriert werden. Hierbei sind
physikalische Gegebenheiten zu berücksichtigen. Neben den Standardfunktionen sollten sta-
tistische Daten erfasst werden können.
2. Implementierung der Auftriebeberechnung
Der Auftrieb des Luftschiffs, das Gewicht der Solarzellen und der Batterien soll anhand der
Eingabeparameter berechnet werden. Hierzu ist es notwendig, eine Volumenberechnung und
Auftriebsberechnung mit internationaler Standardatmosphäre (ISA) durchzuführen. Alle Pa-
rameter sollen über ein XML File angegeben werden können.
3. Implementierung des Schattenwurfs
Eine genaue Schattenberechnung ist notwendig, um die solare Leistung zu schätzen. Mittels
Raytracing sollen auch verschattete bzw. halbverschattete Module berechnet werden können.
Der Querschnitt des Zeppelins soll automatisch ermittelt werden können.
4. Erstellen neuer exakter Zeppelinformen
Neben der bisherigen Beschreibung der Hülle als Ellipsoid sollen weitere Formen, wie die
Hindenburg oder Airliner, als 3D Modell in die Software geladen werden können. Die Maße
sollen als Parameter übergeben und variiert werden können.
5. Optimierungen der Batterie
(a) Tag- und Nachtfahrt
Die Batterienutzung soll auf eine möglichst kurze Fahrzeit hin optimiert werden. Hierbei
sollen je ein optimaler Modus für die Tagfahrt und für die Nachtfahrt implementiert
werden.
(b) Restentladung
Die Batteriekapazität sollte komplett ausgenutzt werden, indem sie zum Fahrtende hin
entladen wird. Hierbei ist eine Abschätzung der verbleibenden Fahrzeit notwendig.
(c) Leistungsreduktion und Spitzenleistung
Bei niedrigem Ladestand sollte die Leistung reduziert werden, um ein Leerlaufen des Ak-
kus zu vermeiden. Bei starkem Seitenwind benötigte Leistungsspitzen sollen abgefangen
werden können.
6. Laufzeitoptimierung
Vorhandener und neuer Code sollte in der Laufzeit weiter reduziert werden, wobei eine Ge-
samtlaufzeit von wenigen Sekunden anzustreben ist. Die Genauigkeit der Ergebnisse muss
hierbei gewahrt werden.
7. Optional: Solarleistung
Die solare Ausnutzung hängt von zwei Faktoren ab, welche die Form des Zeppelins und die
Uhrzeit zu der geflogen wird darstellen. Beide Parameter sollen untersucht und optimiert
werden.
Weitere Anforderungen:
Neben den oben genannten Anforderungen gibt es weitere nicht funktionale Bedingungen, welche
keinen Einfluss auf die Ergebnisse dieser Arbeit haben, jedoch die Anwendbarkeit der Software
sowie zukünftige aufbauende Arbeiten erleichtern. Hierzu gehört, dass der Code übersichtlich in
Klassen strukturiert und leserlich mit Kommentaren geschrieben wird. Dies vereinfacht die spätere
Erweiterbarkeit des Codes.
Die bestehenden Ein- und Ausgabemethoden sollten erhalten bleiben. Hierzu gehört, dass die Ein-
gabeparameter über eine XML Datei gelesen werden. Zusätzlich wird eine Ausgabe der Ergebnisse
als XML vorgesehen. Der Aufbau und die Namensgebung sollte sich am bisherigen Code orientieren.
Es soll darauf geachtet werden, möglichst viel des vorhandenen Codes wieder zu verwenden.
73 Simulationsumgebung
Die Simulation baut auf der Arbeit von Stefan Wagner auf [6]. Das Programm ist in C++ ge-
schrieben und wird mit make kompiliert. Das Programm wird, wie in Algorithmus 1 beschrieben,
ausgeführt. Die XML-Datei enthält alle wichtigen Parameter für die Simulation. Hierbei wurden
Algorithm 1 Programmaufruf
./pathf inder − xml < xmlF ile > [−wind < windF older >]
die Werte aus der Arbeit von Stefan Wagner großteils übernommen [6]. Der Wind-Ordner enthält
überdies die Winddaten für die verschiedenen Fahrthöhen im Tabellenformat. Die Ausgabe der Er-
gebnisse erfolgt nach Abschluss der Simulation in der Konsole, sowie im XML Format in der Datei
pathStatistics.xml
3.1 Veränderte XML Parameter
Der Aufbau des XML-Files wurde großteils übernommen. Es wurden jedoch ein paar Parameter
neu hinzugefügt oder verändert. Wenn Parameter nicht übergeben werden, so werden die in Tabelle
1 genannten Standardwerte geladen.
Bezeichnung Beschreibung Default Wert
takeoffTimeSlot Startzeitfenster für Startoptimierung 0 [h]
simulation_startAtGridPoint Start- & Ende am nächstliegenden Gridpunkt 0
form_type Dateipfad für Zeppelinhülle (STL) ellipsoid
form_mass Leergewicht des Zeppelins 118
form_cw CW Wert des Zeppelins 0.065
g
gas_density Gasdichte des Triebgases 1.01 [ mol ]
gas_fillFactor Füllfaktor des Triebgases 0.9
solarPlacement Winkel, ab dem Solarbedeckung vorhanden ist 0 [°]
battery_capacity Batteriekapazität 0 [kWh]
battery_energyDensity Energiedichte der Batterie 279.56 [Wh/kg]
battery_efficiency Batterie Gesamteffizienz 0.86
battery_charge_power Maximale Ladeleistung 0 [kW]
battery_discharge_power Maximale Entladeleistung 0 [kW]
Tabelle 1: runTest README
3.2 Automatisierte Simulationsdurchläufe
Um verschiedene Parameter auf einer Strecke automatisiert testen zu können, wurde ein zusätzliches
Programm runTest.cpp verfasst. Dieses modifiziert automatisch xml Files, führt die Simulationen
durch und gibt die gewünschten Ausgabeparameter in einem mit Gnuplot lesbarem Format unter
std::out aus. Das kompilierte runScript muss sich im selben Ordner wie die ./pathfinder Datei be-
finden und wird folgendermaßen aufgerufen:
./runTest runDataFile param0 start0 end0 step0 [param1 start1 end1 step1 ...]
Zuerst wird eine XML Datei mit den Simulationsparametern übergeben, danach folgt eine Liste
mit den zu variierenden Parametern. In der runTest.cpp befindet sich zudem ein Array search-
Strings[] mit den Ausgabeparametern, welche untersucht werden sollen. Sobald diese in der Aus-
gabe auftauchen, wird die aktuelle Simulation abgebrochen und automatisiert mit der nächsten
begonnen. Die statistische Auswertung der Daten für diese Bachelorarbeit erfolgte mittels Macros
in Gnuplot
8Bezeichnung Beschreibung
runDataFile Pfad zum XML File mit den Simulationsparametern
paramn Name des zu variierenden Parameters
startn Startwert des Parameters
endn Endwert des Parameters
stepn Schrittweite des zu variierenden Parameters
Tabelle 2: runTest README
94 Aufbau der Zeppelinhülle
Die bisherige Zeppelinhülle wurde in der Arbeit von Stefan Wagner als Rotationsellipsoid diskreti-
siert. Dieses wurde in θ und φ Richtung aus je N Vierecken, welche wiederrum aus je zwei Dreiecken
bestanden, diskretisiert. Bei φ = 0 und φ = π liefen die Vierecke zusammen, weshalb diese an diesen
Stellen nur aus je einem Dreieck diskretisiert wurden. Je nach Solarbedeckung wurde nur die obere
Hälfte oder das gesamte Zeppelin diskretisiert. Hierbei wurden die Dreiecke entlang der z = 0 Achse
gespiegelt. Dafür wird die Sonnenleistung für jedes Dreieck An , wie in Formel 1 dargestellt, ermit-
telt und summiert. Zunächst wird das Kreuzprodukt des Normalenvektors des Dreiecks mit dem
Sonnenstrahlvektor gebildet. Dieses wird anschließend mit der Dreiecksfläche multipliziert, wobei
ein negatives Ergebnis bedeutet, dass das Dreieck im Schatten liegt.
N
X
An · (⃗nn × ⃗s) (1)
n=0
Um eine genauere Darstellung der Hülle realer Zeppeline zu bekommen, wurde zunächst die Kon-
struktion des Ellipsoids so geänderet, dass die Vierecke an der x-Achse statt der z-Achse zusam-
menlaufen. Desweiteren wurde implementiert, dass die Diskretisierung aus einer 3D-Datei geladen
werden kann.
4.1 Aufbau aus Datei
Als Dateiformat wurde das binäre STL-Format gewählt [7], welches in Tabelle 3 dargestellt ist.
Die Datei besitzt die Endung .stl und wird als little endian gespeichert. Für jedes Dreieck werden
Bytes Type Content
80 char Head
4 uint number of triangles
50 per triangle:
12 float[3] Normal Vector
12 float[3] Vertex 1
12 float[3] Vertex 2
12 float[3] Vertex 3
2 uint Byte count
Tabelle 3: STL Dateiformat
jeweils der Normalenvektor und die drei Eckkoordinaten gegen den Uhrzeigersinn gespeichert. Jede
Koordinate besteht aus drei Float Werten, welche die x, y und z Koordinate abbilden. Die Datei
sollte sich zur Ausführung der Simulation im Ordner STL befinden. Als Referenzluftschriff wurde
die LZ 129 Hindenburg anhand einer technischen Zeichnung [8] als STL Datei mittels Sketchup
erstellt. Diese bestand aus einer 245 Meter langen und 41,2 Meter breiten stromlinienförmigen
Hülle, vier großen Rudern, sowie den Triebwerken und einer Kapsel, welche jedoch aufgrund ihrer
vergleichsweise geringen Maße im 3D-Modell vernachlässigt wurden.
Abbildung 1: LZ 129 Hindenburg als STL
104.2 Berechnung des Schattenwurfs
Da die neue Diskretisierung der Hülle nicht mehr rein konvex ist, sondern auch konkave Formen
enthält, wurde eine neue Berechnung des Schattenwurfs mittels Raytracing implementiert. Hierfür
wurde der Z-Buffer Algorithmus gewählt [9]. Es wird zunächst ein Buffer für den Schattenwurf
mit N · N Pixeln erstellt, dieser enthält jeweils den Index des Dreiecks, welches den Schatten an
der Stelle wirft und dessen Entfernung. Für jedes Pixel wird ein Strahl simuliert und Schnitttests
mit allen Dreiecken durchgeführt. Bei M Dreiecken entsteht somit ein Berechnungsaufwand von
O = N 2 · M . Der Strahlvektor berechnet sich folgendermaßen:
sin(azimuth ∗ DEG_T O_RAD) ∗ cos(altitude ∗ DEG_T O_RAD)
⃗ direction = cos(azimuth ∗ DEG_T O_RAD) ∗ cos(altitude ∗ DEG_T O_RAD) (2)
ray
sin(altitude ∗ DEG_T O_RAD)
Um den Abstand zweier Strahlen zu bestimmen, wird mittels Pythagoras die maximal mögliche
Schattengröße berechnet:
zeppelinLength
zeppelinW idth
zeppelinHeight
stepSize = (3)
N
Zwei orthogonal zu rayDirection liegende Vektoren dienen als Hilfe, um das Vektorfeld aufzuspan-
nen:
ray
⃗ direction [1]
⃗ StepHorizontal = −ray
ray ⃗ direction [0] (4)
0
ray ⃗ direction × ray
⃗ StepV ertical = ray ⃗ StepHorizontal (5)
Diese werden anschließend auf die entsprechende Länge normiert:
ray
⃗ StepHorizontal
⃗ StepHorizontal = stepSize ·
ray (6)
∥ray
⃗ StepHorizontal ∥
ray
⃗ StepV ertical
⃗ StepV ertical = stepSize ·
ray (7)
∥ray
⃗ StepV ertical ∥
Alle Rays beginnen in der am Nullpunkt durch die Vektoren ray ⃗ StepHorizontal und ray⃗ StepV ertical
aufgespannten Ebene, mit dem ersten Ray respektive:
−N
2 · (ray
⃗ StepHorizontal [0] + ray
⃗ StepV ertical [0])
⃗
rayOrigin 0 =
−N · (ray
⃗ StepHorizontal [1] + ray
⃗ StepV ertical [1]) (8)
2
−N
2 · (ray
⃗ StepHorizontal [2] + ray
⃗ StepV ertical [2])
⃗
Der Aufhängepunkt eines beliebigen Rays ergibt sich durch Verschiebung von rayOrigin 0 in der
Ebene:
⃗ ⃗ n
rayOriginn = rayOrigin0 + (n mod N ) · ray
⃗ StepHorizontal + ⌊ ⌋ · ray
⃗ StepV ertical (9)
N
Um den Schnitt des n-ten Strahls mit einem Dreieck mit den Eckpunkten A, ⃗ B⃗ und C⃗ zu berechnen,
⃗ ⃗ ⃗ ⃗ ⃗
wird mit den Kanten b = B − A und ⃗c = C − A eine Ebene E mit dem Aufpunkt A und dem Nor-
malenvektor n aufgespannt und der Schnittpunkt ⃗q der Ebene E mit dem Strahl berechnet. Sofern
der Schnittpunkt existiert und in positiver Strahlrichtung liegt, wird mittels Schnittest überprüft,
ob der Schnittpunkt ⃗q im Dreieck liegt [10]. Es gilt hierfür:
⃗ + β · ⃗b + γ · ⃗a
⃗q = A (10)
β≥0 (11)
γ≥0 (12)
1−β−γ ≥0 (13)
11Liegt der Schnittpunkt im m-ten Dreieck wird die Entfernung vom n-ten Strahl folgendermaßen
berechnet:
⃗ n − rayOrigin
⃗nn · A ⃗ n ·⃗
nn
distance = (14)
⃗ direction · ⃗nn
ray
Das Dreieck mit der kleinsten Entfernung wird im Pufferspeicher abgelegt. Wurde dies für alle
Strahlen durchgeführt, wird im Anschluss die Schattenfläche berechnet. Um die solarbeschienene
Fläche zu berechnen, werden Flächen ohne Solarzellen in diesem Rechenschritt nicht berücksichtigt.
Um die Gesamtfläche zu berechnen, muss der Abstand der Strahlen berücksichtigt werden:
N
X
Area = rayIsShaddown · stepSize2 (15)
n=0
Abbildung 2: Schatten Heatmap der Hindenburg bei halber Solarbedeckung
Die beschienene Solarfläche des Zeppelins wird zu Beginn der Simulation in 10-Grad Schritten mit
einer Auflösung von 50x50 Pixeln vorberechnet und in einem zweidimensionalen Array abgelegt.
Da das Luftschiff seitensymmetrisch ist und die Sonne immer einen positiven Winkel über dem
Horizont hat, reicht die Berechnung mit einer Altitude zwischen 0 und 90°, sowie einer Azimuth
zwischen 0 und 180 Grad aus. Zwischenwinkel werden linear interpoliert. Dies verringert die Be-
rechnungszeit während der Simulation. Die AttackArea für die Geschwindigkeitsberechnung wird
mit einer Auflösung von 200x200 Pixeln berechnet.
4.3 Plazierung der Solarzellen
Die Zeppelinhülle wurde in der bisherigen Simulation entweder ganzflächig oder nur zur oberen
Hälfte mit Solarzellen bedeckt. Aufgrund der konvexen Form genügte es, nur die Vertices mit So-
larzellen zu simulieren. Aufgrund des neuen Raytracing-Algorithmus können auch Verschattungen
im Bereich des Ruders simuliert werden und jedem Vertice kann zugewiesen werden, ob es mit
12Solarzellen bedeckt ist. In dieser Bachelorarbeit wurde nur eine globale Plazierung der Solarzellen
vorgenommen. Über den Parameter solarP lacement im XML File kann die Bedeckung aller Verti-
ces ab einem bestimmten Neigungswinkel (Altitude) festgelegt werden. Der Wert 0 bedeutet, dass
alle Flächen die senkrecht oder flacher sind, mit Solarzellen bedeckt sind. Zudem bedeutet -90, dass
alle Flächen mit Solarzellen bedeckt sind und 90, dass es keine solarbedeckten Flächen gibt.
Abbildung 3: Altitude = -90 Abbildung 4: Altitude = -20 Abbildung 5: Altitude = 30
Aktuelle Folien-Solarzellen auf dem Markt erreichen Wirkungsgrade von 4 bis 5,7% [11], wobei
in der Forschung bereits 21,4% Zellenwirkungsgrad erreicht wurden [4]. Organische Foliensolarzellen
bieten die nötige Flexibilität und sind bereits mit einem Gewicht von 500 mg2 erhältlich [12].
Solarbedeckung [°] -80 -60 -40 -20 0 20 40 60 80
Fläche [m2 ] 26800 22705 18462 18360 13102 8907 8805 4561 467
Gewicht [t] 13,40 11,35 9,23 9,28 6,55 4,45 4,40 2,28 0,23
Peak Leistung (1) [kW] 1528 1294 1052 1046 747 508 502 260 27
Peak Leistung (2) [kW] 5737 4858 3950 3927 2805 1907 1885 976 101
g
Tabelle 4: Solare Daten bei 5.7% (1) bzw. 21,4% (2) Effizienz und 500 m2
Die maximale Leistung der Motoren der Hindenburg lag bei 2,4 MW [13]. Um diese Leistung
über die Solarzellen zu erreichen, wäre bei 21,4% Effizienz aufgrund teilweiser Verschattungen eine
Solarbedeckung der gesamten Hülle und Ruder bis zu einem Winkel von -20 Grad notwendig. Das
Gewicht der Solarzellen ist im Vergleich zum Gesamtgewicht, sowie dem historischen Treibstofftank
der Hindenburg recht klein.
Abbildung 6: Relative Solare Leistung der Solarzellen im Jahresmittel bei Ost-West Flügen
4.4 Auftrieb und Fahrthöhe
Das Gewicht des Luftschiffs setzt sich aus dem Leergewicht, dem Gewicht der Solarzellen, sowie
dem Gewicht der Akkus zusammen:
totalW eight = solarW eight + batteryW eight + zeppelinEmptyW eight (16)
Das Leergewicht wird als XML-Parameter an die Simulation übergeben. Das Batteriegewicht wird
aus der Kapazität und der Energiedichte berechnet, welche ebenfalls als XML-Parameter überge-
ben werden. Das Gewicht der Solarzellen wird aus der ermittelten solarbedeckten Fläche und des
Gewichts der Solarzellen pro Quadratmeter berechnet:
batteryM axCapacity
batteryW eight = (17)
batteryEnergyDensity
13zeppelinSolarArea · zeppelinSolarM ass
solarW eight = (18)
1000
Das Volumen des Luftschiffs kann aus den vorzeichenbehafteten Volumen der Tetraeder, welche die
Vertives der Hülle mit dem Nullpunkt bilden, berechnet werden. Voraussetzung ist, dass die Norma-
len der Dreiecke nach außen zeigen. Das vorzeichenbehaftete Volumen voli eines Tetraeders, welches
⃗ B,
durch ein Dreieck (A, ⃗ C)
⃗ und dem Nullpunkt aufgespannt wird, berechnet sich folgendermaßen
[14]:
1
vol = · (−C0 B1 A2 + B0 C1 A2 + C0 A1 B2 − A0 C1 B2 − B0 A1 C2 + A0 B1 C2 ) (19)
6
Die Gesamtfläche wird aus der Summe der Volumen berechnet, wobei negative Volumen genauso
berücksichtigt werden wie positive [14]:
X
voltotal = voli (20)
i
Da nicht das gesamte Luftschiff aus Gaskamern besteht, kann über den XML-Parameter gas_f illF actor
mit einem Faktor zwischen 0 und 1 festgelegt werden, wie groß der Anteil des Füllgas am Gesamtvo-
lumen des Luftschiffs ist. Über den XML-Parameter gas_density kann die Dichte M des Füllgases
in g/mol angegeben werden. Diese beträgt in der Regel 1.01 für Wasserstoff und 4 für Helium. In
Abhängigkeit der Temperatur T in Kelvin und des Luftdrucks p in Pascal kann aus diesen Angaben
mit Hilfe der universellen Gaskonstante R [15] die Dichte ρ des Auftriebsgases berechnet werden
[16]. Die Temperatur und der Luftdruck werden aus der internationalen Standardatmsphäre zwi-
schen 0 und 11 km Höhe aus der maximalen angegebenen Fahrthöhe des Luftschiffes berechnet [17].
So ergibt sich je nach Fahrthöhe eine andere maximale Auftriebskraft:
5.255
0.0065 · maxHeight
p = 101325 · 1 − (21)
288.15
T = 288.15 − 0.0065 · maxHeight (22)
p·M
ρ= (23)
R·T
g
Die Dichte ρ wird für Luft mit einer molaren Masse von 28.9586 mol [18], sowie für das Auftriebsgas
berechnet. Aus der Differenz der beiden Gase multipliziert mit dem Volumen ergibt sich der Auftrieb
F des Luftschiffes [19]:
F = voltotal · gas_f illF actor · (ρAir − ρF illGas ) (24)
Durch Einsetzen und Vereinfachen ergibt sich folgende Formel:
p · (MAir − MF illGas )
F = voltotal · gas_f illF actor · (25)
R · T · 1000
Um die Nutzlast zu berechnen, wird noch das Eigengewicht des Zeppelins subtrahiert:
maxLoad = F − totalW eight (26)
Die LZ129 (Hindenburg) hatte ein Leergewicht von 118 t und ein Füllvolumen von 2·105 m3 [20]. Mit
der in Abbildung 1 gezeigten Diskretisierung wurde mit der Formel 20 ein Volumen von 2, 246·105 m3
berechnet. Daher wurde der gas_fillFactor im Folgenden auf 0,9 festgelegt. Da sich der Auftrieb aus
der maximalen Fahrthöhe ergibt, kann die maximale Nutzlast von 96 t nur bei niedrigen Fahrthöhen
erreicht werden.
Es sei anzumerken, dass ein nach neuem Stand der Technik gebautes Luftschiff gleichen Ausmaßes,
ein geringeres Leergewicht angenommen werden. So hatten die vier Dieselmotoren der LZ 129 und
LZ 130 ein Gewicht von je zwei Tonnen [13]. Derzeitige Elektromotoren kommen auf 5,2 W g [21]
und würden somit ein Gesamtgewicht von nur 114,8 kg je Motor erreichen. Ebenso müsste ein
solarbetriebenes Luftschiff, anders als die Hindenburg, keine 88 t Dieseltreibstoff sowie Schmieröl
mitführen.
14Fahrthöhe [m] 540 989 1949 3013 5575
Luftdichte [hPa] 950 900 800 700 500
Nutzlast [t] 108,57 99,05 78,32 58,97 16,80
Tabelle 5: Nutzlast in Abhängigkeit der Fahrthöhe ohne Solarzellen und Akku
155 Batteriesimulierung
Für die Simulation gibt es ein globales Batterieobjekt. Zu Beginn wird die Kapazität, sowie Ef-
fizienz, maximale Lade- und Entladeleistung festgelegt. Die Effizienz liegt zwischen 0 und 1 und
wird nur beim Ladevorgang verrechnet. Die Simulation nutzt die useBattery Methode, welche die
Leistung und die Zeit bekommt und true oder false zurück gibt, abhängig davon, ob genug Kapa-
zität und Leistung vorhanden sind. Nach jedem Simulationsdurchlauf muss die Batterie über die
Reset-Funktion zurückgesetzt werden.
class Battery
-maxDischargePower
-maxChargePower
-maxCapacity
-currentCapacity
-efficiency
-energyDensity
+getCurrentCapacity()
+getChargePower()
+getDischargePower()
+getMaxCapacity()
+getEfficiency()
+getCharge()
+reset()
+setChargePower()
+setDischargePower()
+setCapacity()
+setEfficiency()
+getHowMuchToFullCharge()
+runBattery() //deprecated
+loadBattery() //deprecated
+useBattery()
+getEnergyDensity()
+setEnergyDensity()
Tabelle 6: UML Diagramm battery.cpp
5.1 Restrictions
Da in der Praxis die Batteriegröße meist fest vorgegeben ist, oder Paretopunkte in Abhängigkeit
der Batteriekosten, dem Gewicht, der (Ent-)ladeleistung, der Nutzlast und der Fahrzeit gefunden
werden sollen, wurden folgende Restrictions eingeführt:
Die Batterie ist nach unten begrenzt und darf nicht überladen werden:
0 ≤ currentCapacity ≤ batteryM axCapacity (27)
Es gibt eine maximale Lade- und Entladeleistung:
chargeP ower ≤ batteryP ower ≤ dischargeP ower (28)
Für das Luftschiff gibt es zudem weitere Restrictions, welche einzuhalten sind:
Um manövrierfähig zu bleiben gibt es eine Mindestgeschwindigkeit, welche zu keinem Zeitpunkt
unterschritten werden darf. Zudem gibt es eine maximale Leistung, welche das Luftschiff erbringen
kann. Gleichzeitig muss es jedoch auch in der Lage sein, schneller als der mögliche Seitenwind zu
fliegen, um nicht von den Wegpunkten abzutreiben.
max(minP ower, perpendicularP ower) ≤ engineP ower ≤ engineM axP ower (29)
165.2 Geschwindigkeitsberechnung
Die Suche des kürzesten Pfades des Luftschiffs erfolgt in mehreren Schritten. Für die Wegsuche
stehen wahlweise ein Dijkstra- oder A*-Algorithmus aus der Arbeit von Stefan Wagner zur Wahl
[6]. Der Aufbau der Kanten erfolgt dreidimensional in 18 Richtungen, sowie bei starkem Wind nur
in Windrichtung. Hierbei wurde die maximale Batterieleistung als Restriction neu eingeführt. Im
Anschluss läuft ein Glättungsalgorithmus. Hierbei wurde der Bilineare Glättungsalgorithmus eben-
falls aus der Arbeit von Stefan Wagner übernommen. Zum Schluss der Simulation wird ein finaler
Durchlauf mit Einbezug des Akkustandes durchgeführt.
Für den Such- und den Glättungsalgorithmus werden jeweils die Fahrzeiten kurzer Teilstrecken
benötigt. Da diese nicht vom Startpunkt aus zusammenhängend berechnet werden, stehen keine
Akkustände während der Wegsuche zur Verfügung. Dies wurde in der vorausgehenden Arbeit da-
durch gelöst, dass die Batterie erst im letzten finalen Durchlauf berücksichtigt wurde. Es wurde
hierbei stets mit maximaler Geschwindigkeit geflogen und eine Batterie mit unendlicher Entladeka-
pazität angenommen. Zum Ende der Simulation wurde ausgegeben, welche Kapazität für die Fahrt
benötigt wurde.
In der Praxis ist die Batteriegröße meist im Voraus gegeben. Die optimale Nutzung, sowie die Fahr-
troute sollen mit der gegebenen Batterie berechnet werden.
Es wurde davon ausgegangen, dass das Luftschiff immer mit einer vollen Betterie startet:
initialCapacity = currentCapacityt=0 = maxCapacity (30)
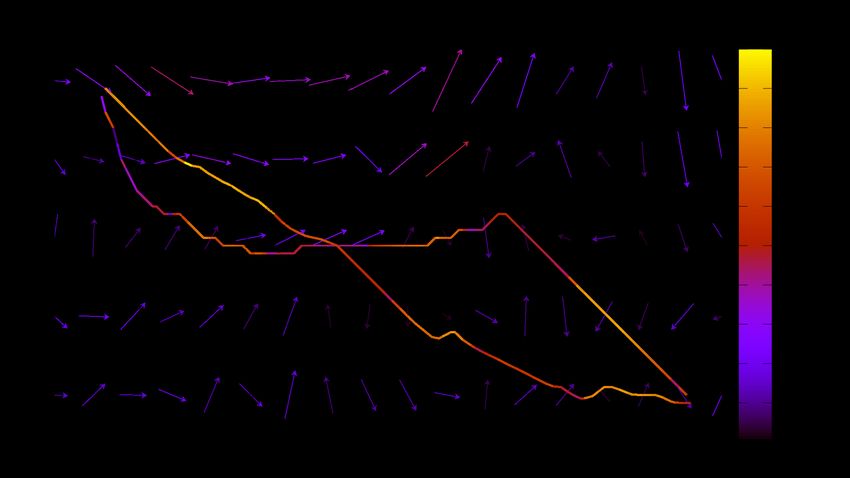
Die Gesamtleistung des Luftschiffes berechnet sich aus der Summe der Sonnenleistung, sowie der
Batterieleistung:
PEngine = PSun + PBattery (31)
Abbildung 7: Strecke und Geschwindigkeit wischen Kiew und Chongqing am 22.02.2022
176 Optimierung der Batterienutzung
Da der Luftwiderstand und somit der Energieverbrauch des Zeppelins quadratisch zur relativen
Geschwindigkeit ansteigt, ist es am besten, immer mit konstanter Geschwindigkeit zu fliegen. Die
Simulation findet in zwei Schritten statt. Im ersten Schritt wird der optimale Weg gesucht und
geglättet. Hierbei sind die verbleibende Fahrstrecke, sowie der tatsächliche Akkustand nicht und
die Uhrzeit nur ungefähr bekannt. Es werden daher allgemeine Heuristiken zur Berechnung der
Batterienutzung verwendet. In einem zweiten Schritt wird eine genaue Simulation durchgeführt,
bei der der Tatsächliche Akkustand bekannt ist und in die Berechnung miteinfließt.
Für Nachtflüge sollte die Batterie daher am Abend voll aufgeladen sein und gleichmäßig über die
Dauer der Nacht entladen werden. Um bei unvorhergesehenen Wetterereignissen, wie starkem Sei-
tenwind, sowie während der sonnenschwachen Morgenstunden nicht Gefahr zu laufen, dass der Akku
leer geht, werden zwei Stunden Puffer bei der Abschätzung bzw. drei Stunden beim Simulations-
durchlauf zur Nachtdauer addiert. Diese Werte haben sich in diversen Simulationsdurchläufen als
robust und effizient erwiesen.
Heuristik:
maxCapacity
batteryP ower = (32)
nighttime + 2
Simulation:
currentCapacity
batteryP ower = (33)
hoursT oSunrise + 3
Tagsüber soll die Batterie hingegen über den Laufe des gesamten Tages gleichmäßig aufgeladen
werden:
Heuristik:
maxCapacity
batteryP ower = (34)
daytime
Simulation:
maxCapacity − currentCapacity
batteryP ower = − (35)
hoursT oSunset
6.1 Batteriedimensionierung
Aufgrund ihres geringen Gewichts und bereits großflächigen Nutzung im Verkehrssektor wurde die
Verwendung von Lithium-Nickel-Mangan-Cobald-Oxid Akkus (NMC) oder Lithium-Nickel-Cobalt-
Aluminum-Oxid Akkus (Li-Aluminium) angenommen. Beide Arten der LiIo Batterien sind wieder-
aufladbar und haben eine hohe Energiedichte von 150 bis 220 W h
kg für NMC Akkus bzw. 200 bis 260
Wh Wh
kg für Li-Aluminium Akkus. In der Forschung wurden bereits 300 kg erreicht. Die Entladeleistung
C C
liegt bei 1 h für Li-Aluminium Akkus und 1 bis 2 h bei NMC Akkus [22]. Insbesondere die Preise
für NMC Akkus sind in den letzten Jahren durch die zunehmende Verbreitung von Elektroautos
und Bussen auf durchschnittlich 132 $/kWh gesunken und bis 2024 sind weitere Preissenkungen
auf unter 100 $/kWh zu erwarten [23]. Für die folgenden Luftschiffsimulation wurden verschiedene
Batteriegrößen von 2 bis 10 MWh mit 279,56 W h
kg [5], sowie eine solare Effizienz von 21,4% ange-
nommen.
Kapazität [MWh] Nutzlast [t]
10 18,0 20,6 22,8 24,9
8 25,2 27,8 29,9 32,1
6 32,3 35,0 37,1 39,2
4 39,5 42,1 44,3 46,4
2 46,6 49,3 51,4 53,5
3,9 2,8 1,9 1,0 Solare Leistung [MW]
Tabelle 7: Nutzlast der Hindenburg in Tonnen bei 3013 m Höhe in Abhängigkeit der Batteriekapa-
zität und solaren Leistung
Wie in Tabelle 7 zu erkennen, hat die Batteriegröße einen entscheidenden Faktor bei der zur Ver-
fügung stehenden Nutzlast. Bei aktuellen Preisen für NMC Akkus würde ein 2 MWh Akku etwa
18264.000 USD kosten und hätte ein reines Batteriegewicht von 7,15 t. Ein 10 MWh Akku hingegen
würde 1,32 Mio USD kosten und 35,8 t auf die Waage bringen. Dies isr immer noch weniger als die
Hälfte des Gewichts der 88 t Treibstoff und Schmieröl der LZ129 Hindenburg wären.
Es gibt zwei Faktoren, welche sich beim Finden der optimalen Batterie gegenüberstehen:
Wie bereits in Tabelle 5 ersichtlich, ist neben der Batteriegröße der maßgebende nutzlastbestimmen-
de Faktor die Fahrthöhe. Der zweitgrößte Faktor ist die Größe der Batterie, sowie die Solarzellen.
Demnach ist die Batterie möglichst klein zu halten. Auf der anderen Seite muss die Batterie groß
genug sein, um Nachtfahrten zu bewerkstelligen, sowie bei starken Winden manövrieren zu können.
Um die optimale Batteriegröße zu finden, wurden die beiden Strecken Frankfurt - New York, sowie
Madrid - Gran Canaria mit jeweils unterschiedlicher Solarbedeckung, Batteriegröße und Abfahrszeit
simuliert.
Die Batteriegröße wurde wieder zwischen zwei und zehn Megawattstunden variiert. Die Solarbede-
ckung wurde je mit 0 und -20 Grad Altitude gewählt. Aufgrund der hohen jahreszeitlichen Abwei-
chungen wurden die durschnittlichen Fahrzeiten jeweils für Winter, Sommer und Frühling/Herbst
getrennt untersucht.
Abbildung 8: Durchschnittliche Fahrzeit der Hindenburg in Abhängigkeit der Batteriegröße
In Abbildung 8 ist zu erkennen, dass die durchschnittliche Fahrzeit, wie zu erwarten, mit zuneh-
mender Batteriegröße abnimmt. Unabhängig von der Jahreszeit ist die größte Fahrzeitreduktion
zwischen 2 MWh und 4 MWh zu erzielen, wobei der Effekt in den Wintermonaten am größten
ist. Bei Akkus größer als 4 MWh tritt kaum noch eine Fahrzeitverkürzung ein. Aufgrund der un-
terschiedlichen Windsituation gibt es eine hohe mittlere Abweichung. Es ist zudem zu erkennen,
dass die Solarbedeckung ebenfalls einen großen Einfluss auf die Fahrzeit hat, insbesondere in den
Frühjahrs- und Herbstmonaten. Eine genaue Untersuchung des Einflusses der Solarzellen wird in
Kapitel 7.1 vorgenommen.
6.2 Restentladung vor Erreichen des Ziels
Beim Erreichen des Endes seiner Fahrstrecke hat das Luftschiff in der Simulation meistens noch
Restleistung in der Batterie. Diese Energie kann genutzt werden, um dem Luftschiff kurz vor dem
Ziel nochmal einen starken Schub zu geben. Um sicherzustellen, dass hierbei nicht der Akku leer
geht, wird zunächst eine Äbschätzung der verbleibenden Fahrzeit vorgenommen und eine halbe
Stunde Puffer dazu gerechnet:
19totalDistance − reachedDistance
estT imeLef t = (36)
averageReachedSpeed + 0.5
Es gibt zwei Metriken, ab wann eine Entladung zum Ende der Fahrt hin sinnvoll ist:
Übersteigt die aktuelle Kapazität die maximale Entladeleistung multipliziert mit der geschätzten
verbleibenden Fahrzeit, so kann mit voller Batterieleistung gefahren werden. Dies betrifft meistens
die letzte halbe Stunde der Fahrt:
Algorithm 2 Recalculate battery power
Require: reachedDistance > 0
if currentCapacity ≥ estT imeLef t ∗ dischargeP ower then
batteryP ower ← dischargeP ower
end if
Die zweite Metrik betrifft die Optimierung bezüglich der gleichbleibenden Fahrgeschwindigkeit. Bei
einer optimalen Batterienutzung fährt das Luftschiff immer mit konstanter Geschwindigkeit, diese
ergibt sich bei Langstrecken aus der durchschnittlichen solaren Leistung (averageSunPower) abzüg-
lich Lade- und Entladeverlusten. Übersteigt die Batteriekapazität diese durchschnittliche Leistung
multipliziert mit der geschätzten verbleibenden Fahrzeit, so kann die Entladleistung, sofern sie ge-
ringer ist, auf diese durchschnittliche Leistung angehoben werden:
Algorithm 3 Recalculate battery power
Require: reachedDistance > 0
if currentCapacity ≥ estT imeLef t ∗ averageSunP ower then
if batteryP ower ≤ averageSunP ower then
batteryP ower ← averageSunP ower
end if
end if
Diese Optimierung bewirkt, dass das Luftschiff, sofern genug Kapazität vorhanden ist, immer mit
mindestens durchschnittlicher Leistung fährt. Dies führt dazu, dass die Batterie bereits mehrere
Stunden vor Erreichen des Ziels kontinuierlich entladen wird und nicht erst kurz vor Fahrtende. Da
die Restentladung oft bereits während des Tages einsetzt, kann meist eine Reduzierung der Fahrzeit
zwischen einer und drei Stunden erzielt werden.
Abbildung 9: Simulation LZ-129 am 10. Januar von NY nach FRA ohne Akku-Restentladung
20Abbildung 10: Simulation LZ-129 am 10. Januar von NY nach FRA mit Akku-Restentladung
6.3 Leistungsreduktion bei niedrigem Ladestand
Nach der Berechnung der solaren Leistung und der Leistungsberechnung für die Batterie zwischen
zwei Wegpunkten, wird die Fahrgeschwindigkeit, sowie die daraus resultierende Fahrdauer und
Energieentnahme aus der Batterie berechnet. Reicht der vorhandene Ladezustand trotz vorheriger
Abschätzungen nicht für die Fahrt auf der Teilstrecke aus, wird eine Leistungsreduktion um 10%
vorgenommen, bis die Strecke gefahren werden kann. Sollte nach der zehnten Leistungsreduktion
die Teilstrecke immer noch nicht gefahren werden können, wird eine Fehlermeldung generiert. Für
die Teilstrecke wird in diesem Fall eine Fahrt mit 10% der Leistung angenommen, welche z. B. mit
einem Notaggregat bewerkstelligt werden kann.
Algorithm 4 Recalculate low battery
reducedP ower ← batteryP ower
batteryEmptyCnt ← 0
while true do
speed ← powerT oSpeed(reducedP ower)
time = distance/speed
isEmpty!useBattery(reducedP ower, time)
if !isEmpty then
break
end if
batteryEmptyCnt ← batteryEmptyCnt + 1
reduceF actor ← (10 − batteryEmptyCnt) ∗ 0.1
reducedP ower ← batteryP ower ∗ reduceF actor
if batteryEmptyCnt ≥ 10 then
print errorM sg
break
end if
end while
217 Weitere Optimierungen
7.1 Solarbedeckung
Wie sich bei der Abschätzung der optimalen Batteriegröße bereits abzeichnete, ist die Fahrzeit ne-
ben der Batteriegröße im großen Maße von der Solarbedeckung abhängig. Deshalb wurde in weiteren
Simulationsdurchläufen die Auswirkung der Solarbedeckung und die durchschnittliche Leistung der
Zellen simuliert. Als Luftschiff wurde die LZ-129 Hindenburg mit unterschiedlicher solarer Bede-
ckung in 25 Grad Schritten, beispielhaft auf der Langstrecke New York - Frankfurt, untersucht.
Hierbei wurde in drei Gruppen unterteilt: die Monate November und Februar werden als Winter-
monate gewertet, Mai und August als Sommermonate und die restlichen Monate als Frühling und
Herbst. Es wurde die Fahrzeit und die durchschnittliche solare Leistung in kW pro Stunde und
kW Peak berechnet. Es wurden jeweils mehrere Uhrzeiten und Batteriegrößen simuliert und die
durchschnittliche Fahrzeit und Standardabweichung berechnet.
Bei geringer Solarbedeckung ab 75 Grad sind nur wenige Fahrten im Sommer möglich, jedoch reicht
Abbildung 11: Durchschnittliche Fahrzeit und solare Leistung der Hindenburg in Abhängigkeit der
Solarbedeckung
in den meisten Fällen diese Solarbedeckung nicht aus, um die Strecke zu fahren. Wie zu erwarten
nimmt, wie in Abbildung 11 zu sehen, mit zunehmender Solarbedeckung die Fahrzeit ab. Im Sommer
ist eine Reduzierung von über 25 Stunden möglich, wobei bei einer Solarbedeckung unter 0 Grad
eine Sättigung eintritt. Bei Fahrten im Frühlung oder Herbst ist mit größerer Solarbedeckung mit
einer Reduzierung von immerhin 20 Stunden zu zu rechnen. Im Winter ist kaum eine Reduzierung
der Fahrzeit zu erwarten.
Insgesamt ist durch zusätzliche Solarbedeckung eine größere Fahrzeitreduzierung zu erzielen als
durch die Wahl einer größeren Batterie. Bei einem PV-Modulpreis von 0,2 €/W [24] würden die
Module für eine Solarbedeckung ab 0 Grad etwa 0,56 Mio. €, sowie eine Solarbedeckung ab -20
Grad etwa 0,79 Mio. € kosten. Somit ist im direkten Vergleich mit zusätzlichen Solarzellen bei
gleichen Kosten eine höhere Fahrzeitreduktion und Nutzlast zu erzielen als durch die Wahl eines
größeren Akkus.
7.2 Größe und Form des Zeppelins
Aufgrund des großen Einflusses der Solarbedeckung auf die Fahrzeit wurde in einem weiteren Si-
mulationslauf der Einfluss der Größe und Form untersucht. Um die optimale Form und Größe zu
22finden, wurde die LZ-129 Hindenburg als Ausgangsluftschiff gewählt und die simulierte Fahrzeit von
New York nach Frankfurt in Abhängigkeit verschiedener Seitenverhältnissen und Größen bzw. der
daraus resultierenden Nutzlasten und CW-Werte betrachtet. Es wurde jeweils -20 Grad Solarbede-
ckung und ein 3 MWh Akku gewählt.
Abbildung 12: Fahrzeit in Abhängigkeit der Seitenverhältnisse und der Nutzlast
In Abbildung 12 ist auf der x-Achse das Seitenverhältnis sowie auf der y-Achse die berechnete Fahr-
zeit abgebildet. Jeder Simulationsdurchlauf ist als Datenpunkt mit einer Punktgröße proportional
zur Luftschiffgröße abgebildet. Die Farbe repräsentiert die maximale Tragkraft in Tonnen. Es ist zu
erkennen, dass bei gleicher Solarbedeckung und Batteriegröße kleinere Luftschiffe meist schneller
sind als größere. Die niedrigsten Fahrzeiten erzielten Luftschiffe mit einem Seitenverhältnis von 1,
wobei die minimale Fahrzeit im direkten Vergleich bei hohen Luftschiffen stark ansteigt und bei
flachen Luftschiffen nur leicht. Da in der Simulation nur der statische und nicht der dynamische
Auftrieb betrachtet wurde, kann es durchaus sinnvoll sein, ein Luftschiff etwas breiter als hoch zu
bauen und durch Wahl einer geeigneten Form den dynamischen Auftrieb mit zu nutzen. Bei größe-
ren Luftschiffen ist ein 3 MWh womöglich zu klein dimensioniert. Die bisher genutzte Form eines
Stromlinienkörpers mit kreisrundem Durchschnitt stellt auch für Solarluftschiffe in Anbetracht der
solaren Ausbeute eine sehr gute Lösung dar.
7.3 Abfahrzeit
Die Sonneneinstrahlung und Solarbedeckung sind, wie in Kapitel 4.2 und 7.1 untersucht, entschei-
dende Faktoren bei der zur Verfügung stehenden Leistung und der dadurch verbundenen Fahrzeit.
Deshalb wurde untersucht, welchen Einfluss hierbei die Startzeit hat und inwiefern sich im Voraus
Aussagen über die optimale Abfahrtzeit machen lassen. Es wurden die zwei Langstrecken Frankfurt
- New York und Madrid - Neu-Delhi sowie die Mittelstrecke Madrid - Gran Canaria untersucht.
Hierbei wurden je 288 Flüge im Januar und im Juli an verschiedenen Tagen und Uhrzeiten in beide
Fahrtrichtungen simuliert.
In Abbildung 13 ist exemplarisch die durchschnittliche prozentual zu erzielende Zeitersparnis im
Vergleich zum Worst-Case-Szenario für die Strecke Madrid - Neu-Delhi zu sehen. Die Ergebnisse der
beiden Langstrecken Madrid - Neu-Delhi und Frankfurt - New York unterscheiden sich nur in der
Zeitverschiebung. Es ist ein deutlicher Unterschied je nach Fahrtrichtung zu erkennen. In Ost-West
Richtung ist mit großen Schwankungen der durchschnittlichen Fahrzeit zu rechnen, welche jedoch
mit hohen Varianzen verbunden sind. Das Luftschiff muss hier gegen den Wind fliegen und aufgrund
23Abbildung 13: Auswirkung der Startzeit auf die Fahrzeit
der Windgeschwindigkeiten ist die Route nahe am Leistungslimit des Luftschiffs. Dies führt dazu,
dass bereits kleine Veränderungen der Startbedingungen große unvorhersehbare Auswirkungen auf
die Route und die Fahrzeit haben. Es ist keine Aussage über die optimale Abfahrtszeit zu treffen.
Hier empfiehlt es sich, eine bodennahe und ruhige Luftschicht in die Simulation aufzunehmen, um
diese zu stabilisieren. In West-Ost Richtung hingegen ist ein deutliches Muster zu erkennen. Es ist
im Sommer eine Zeitersparnis von bis zu 6% und im Winter von bis zu 10% zu erzielen. Die Fahrzeit
korreliert sehr stark mit der zur Verfügung stehenden durchschnittlichen Leistung. Bei Mittelstre-
cken war der Effekt der Startzeit noch eindeutiger und stärker. Auf der Strecke Madrid - Gran
Canaria konnte je nach Richtung und Jahreszeit eine Zeitersparnis von 44 bis 50% erzielt werden.
Die optimale Startzeit ist hierbei wenige Stunden nach Sonnenaufgang. Da sich die optimale Ab-
fahrtszeit je nach Strecke, Jahreszeit und Windbedingungen unterscheidet, wurde im XML-File der
Parameter takeoffTimeSlot eingeführt. Mit diesem kann ein Startzeitfenster angegeben werden. Die
voraussichtlich optimale Startzeit wird innerhalb dieses Startzeitfensters automatisch ermittelt und
ausgewählt. Um Rechenzeit zu sparen, wird die Fahrtroute nur einmal berechnet und die optimale
Zeit im zweiten Simulationsschritt gesucht. Anschließend wird die exakte Route am gefundenen
Zeitpunkt neu berechnet und die tatsächliche Fahrzeit ermittelt.
248 Zusammenfassung
Luftschiffe füllen in Sachen Kosten und Geschwindigkeit eine Nische zwischen Luftfracht und Con-
tainerschiffverkehr. Bereits bei neuen dieselbetriebenen Luftschiffen entsteht ein CO2 Ausstoß von
etwa 7% im Vergleich zum Luftverkehr [2], jedoch drei mal so hoch wie beim Zugverkehr [25].
Zudem ist das heutzutage oft verwendete Helium eine knappwerdende Ressource [26], hingegen ist
Wasserstoff leicht entflammbar und Luftschiffe sind anfällig bei schlechten Wetterverhältnissen. Ak-
tuelle Passagierluftschiffe fliegen nicht bei Windstärken über 35 km
h , bei Starkregen, Hagel, Schnee
oder bei Gewitter [27], was jedoch aufgrund fehlender Daten nicht vollständig in der Simulation
berücksichtigt werden konnte.
Die Simulationen zeigten, dass es mit heutigem Stand der Technik möglich ist, ein solarbetrie-
benes Luftschiff zu bauen, ohne hierbei eine Tragkraftreduktion in Kauf nehmen zu müssen. Durch
die Batterieoptimierungen konnte gezeigt werden, dass auch Nachtflüge bewerkstelligt werden kön-
nen. Bei passenden Windverhältnissen und ausreichend Solarzellen sind der Fahrstrecke theoretisch
keine Grenzen gesetzt. Zudem ist im Gegensatz zu konventionell betriebenen Luftschiffen keine Bal-
lastwassergewinnungsanlage notwendig [20].
Bei längeren Routen über mehrere Nächte hat vor allem die Größe des Solarfeldes den größten
Einfluss auf die Fahrdauer. Hier konnte mit einer Solarbedeckung von etwa -20 Grad ein guter
Kompromiss zwischen Fahrzeit, Gewicht und Kosten gefunden werden.
Zudem konnte ein erster Überblick über die mögliche Dimensionierung der Batterie sowie deren
Gewicht gegeben werden. Bei Luftschiffen der Größe der Hindenburg ist eine Batterie von etwa 4
MWh ausreichend, um über Nacht fahren zu können. Somit ist eine grobe Nutzlasteinschätzung
möglich. Hierbei liegen solarbetriebene Luftschiffe aufgrund des fehlenden Treibstofftanks im Vor-
teil gegenüber Dieselbetriebenen.
Es hat sich gezeigt, dass in der Regel der kreisförmige Querschnitt ohne Betrachtung der Aero-
dynamik die effizienteste Form bietet, auch wenn andere Formen eine bessere solare Ausbeutung
ermöglichen, wobei kleinere Luftschiffe bei gleicher Akkugröße trotz geringerer solarer Leistung im
Durchschnitt schneller fahren können.
Bei Kurzstrecken und Langstrecken in Windrichtung spielt zudem die Abfahrtszeit eine große Rolle.
Hier ist es sinnvoll, die Fahrt so zu planen, dass das Luftschiff zur Mittagszeit startet.
8.1 Ausblick
Da die Simulation ohne Berücksichtigung der Bewölkung erfolgte, sind die Ergebnisse für Fahrzeiten
vor allem in niedrigen Höhen nur bei optimalen Wetterverhältnissen verwertbar. Diese sind jedoch
nur selten anzutreffen. Verschattung und Streulicht von Wolken könnten in einer zukünftigen Arbeit
untersucht werden. Da der Schatten in einem Cache vorberechnet wird, sollte diese Verfeinerung
der Simulation ohne großen zusätzlichen Rechenaufwand möglich sein. Die genaue Akkusimulation
findet erst im letzten Schritt der Simulation statt und hat daher keinen großen Einfluss auf den
Wegsuchealgorithmus, sowie den Glättungsalgorithmus. Eine Einbindung der exakten Akkusimula-
tion wäre mit Hilfe von Backtracking und eines anderen Glättungsalgorithmus möglich. Dies würde
auch Fahrsimulationen in der Polarnacht ermöglichen.
Für Fahrten gegen die Windrichtung arbeitet die Simulation oft am physikalischen Limit, was zu
Instabilitäten führen kann. Hier wäre es sinnvoll, eine zusätzliche sehr bodennahe Windebene ein-
zuführen.
Die Laufzeitanforderungen wurden eingehalten, so dass es möglich war, Auswirkungen einzelner
und mehrerer Parameter in Verbund zu untersuchen. Da die Simulationen auf einigen Annahmen
und theoretischen Überlegungen beruhen, wäre das Testen der Ergebnisse mittels eines Prototypen
eine weitere Möglichkeit, um die Genauigkeit der Simulation zu verbessern. Hier könnte z. B. ein
bestehendes Luftschiff mit einem kleinen Solararray nachgerüstet werden, um die Ergebnisse zu
validieren.
259 Literaturverzeichnis
Literatur
[1] Jacob Teter Sarah McBain. Tracking transport 2021. 2021. IEA.
[2] Hybrid Air Vehicles Limited. The low carbon way to travel from city centre to ci-
ty centre. https://www.hybridairvehicles.com/news-and-media/overview/insights/
airlander-10-will-provide-a-new-option-for-regional-travel/.
[3] IEA. Rail - analysis - iea. 2021. IEA.
[4] Neuer wirkungsgradrekord bei flexiblen solarzellen. https://www.empa.ch/de/web/s604/
cigs-efficiency-record-2021. RAINER KLOSE.
[5] China: In some bevs, battery cell energy density now reaches 250-280 wh/kg. https:
//insideevs.com/news/428511/china-battery-energy-density-280-wh-kg/, 2020. Mark
Kane.
[6] Stefan Wagner. Optimale routenplanung für einen solarzeppelin. 2020.
[7] Inc StereoLithography Interface Specification, 3D Systems. The stl format. 1989. Automated
Fabrication.
[8] David Fowler. Hindenburg d-lz129 - a set of technical drawings of the passenger airship hin-
denburg. http://www.highriskadventures.com/airships/lz129/, 2021.
[9] Lance Williams. Casting curved shadows on curved surfaces. 1978. ACM SIGGRAPH Com-
puter Graphics.
[10] P. Hoffmann. Raytracing: Einfache schnitttests. 2010.
[11] Heliasol® - die innovative solarfolie. https://www.heliatek.com/de/produkte/heliasol/
#accordion-168-3. Heliatek GmbH.
[12] Asca® module general data. https://www.asca.com/wp-content/uploads/2021/07/
ASCA-General-datasheet_EN.pdf, 2021. ARMOR solar power films GmbH.
[13] William Pearce. Daimler-benz db 602 (lof-6) v-16 die-
sel airship engine. https://oldmachinepress.com/2017/02/20/
daimler-benz-db-602-v-16-diesel-airship-engine/, 2017.
[14] Cha Zhang and Tsuhan Chen. Efficient feature extraction for 2d/3d objects in mesh represen-
tation. 2001. IEEE.
[15] 2018 CODATA recommended values. 2018. CODATA Task Group on Fundamental Constants.
[16] Luftdichte. https://studyflix.de/chemie/luftdichte-3009. studyfix.
[17] Die barometrische höhenformel. http://wetter.andreae-gymnasium.de/interaktives/
Druck/barometrische.htm, 2010. Wetter- und Klimaprojekt Herrenberg.
[18] Wenger Engineering GmbH. Luft - alle wichtigen stoffdaten auf einen blick. https:
//stoffdaten-online.de/fluide/luft/. Stoffdaten online.
[19] Berechnungen zum aufstieg des wetterballons. http://www.bv-westfalen.de/
stratosphaerenballon/theorie/berechnungen-zum-aufstieg-des-wetterballons/,
2017. BW-Westfahlen.
[20] Peter Kleinheinst und Wolfgang Meighörner. Die großen Zeppeline. 2005. Springer-Verlag.
[21] Factsheet rekord-motor sp260d und extra 330le. https://assets.new.
siemens.com/siemens/assets/api/uuid:04c7fe39-b322-417f-a3ac-7bcae1d64d50/
factsheet-erstflug-weltrekordmotor-d.pdf, 2016. Siemens.
26[22] Isidor Buchmann. Batteries In A Portable World. 2017. BU-216: Summary Table of Lithium-
based Batteries.
[23] BloombergNEF. 2021 annual battery price survey. 2021. BloombergNEF.
[24] Dr. Harry Wirth. Aktuelle fakten zur photovoltaik in deutschland. 2022. Frauenhofer ISE.
[25] HaCon Ingenieurgesellschaft mbH. Ecopassenger. http://www.ecopassenger.org/bin/
query.exe/en?ld=uic-eco&L=vs_uic&seqnr=5&ident=jt.0118981.1643626054&OK.
[26] MarketWatch. Global helium market size 2022 research report by share, growth, trends and
forecast to 2028 says absolute reports. 2022. Global Helium Market Insights and Forecast to
2028.
[27] Deutsche Zeppelin-Reederei GmbH. Häufig gestellte fragen zu den flügen. https://
zeppelin-nt.de/de/service/faq.html.
27Sie können auch lesen