Nebenläufige Systeme (ehem. Wissensverarbeitung) SS/WS 19/20 für IIOb17 - Georg Ringwelski
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Nebenläufige Systeme
(ehem. Wissensverarbeitung)
SS/WS 19/20 für IIOb17
Georg Ringwelski
"Nebenläufige Systeme" stand 10.4.2019 1TODO WS 19/20
• Einführung SW Test nach ISTQB und Anwendungung in Embedded
• Probleme bei Synchronisierung: deadlock, livelock, starvation
"Nebenläufige Systeme" stand 10.4.2019 2Ablauf
• 4 Sitzungen im SS19: 21.3 bis 11.4., dafür im WS nur bis Weihnachten
• Themen der 4 Sitzungen:
• Eingebettete Systeme, Architektur und Signalverarbeitung
• Wdh: Nebenläufige Programmierung und Synchronisierung in Java
• Nebenläufige, synchronisierte und fehlertolerante Erfassung von Sensorwerten
• Modellierung von Agenten mit Zustandsautomaten (=statecharts)
Eine Grundlage für die Erfassung und Verarbeitung der Sensormessungen
im Modul „Mobile Roboter“ bei Prof. Böhm im SS19
• Weitere Themen im WS: Exceptions, Testen in nebenl. und Embedded Sys.,
Build-Prozesse
• Im Wintersemester: Jeder macht die PL (4 Teilaufgaben) in Einzelleistung:
Kollisionsfrei selbstfahrende Autos mit MiL, HiL für NXT (!) und EV3
"Nebenläufige Systeme" stand 10.4.2019 3Nebenläufige Systeme
1. Eingebettete Systeme, Architektur und Signalverarbeitung
2. Wdh: Nebenläufige Programmierung und Synchronisierung in Java
3. Nebenläufige, synchronisierte und fehlertolerante Erfassung von
Sensorwerten
4. Modellierung von Agenten mit Zustandsautomaten (=statecharts)
"Nebenläufige Systeme" stand 10.4.2019 4Komponenten eingebetteter Systeme
• Kontrolleinheit (regelbasiert oder
reaktiv) steuert das Verhalten
• Aktoren (Output) verändern
Zustand und Umwelt
• Sensoren (Input) verändern
Zustand durch kontinuierliche
Verarbeitung von Signalen
• Umgebung ist „Bestandteil“ des
Systems, je nach Konfiguration
Was ist das alles bei uns?
"Nebenläufige Systeme" stand 10.4.2019 5Architektur bei uns
Wir haben:
• Kontrolleinheit: NXT oder EV3 Brick
• Aktoren: Motoren, Licht…
• Sensoren: Touch-, Ultraschall-, Farbsensor, Kamera
• Umgebung Tisch: beeinflusst die Messung der Sensoren: Berührt?
Entfernung, Farbe, Video-Stream
Wir haben nicht:
• Automatisierte Beobachtung der Aktoren „von außen“ z.B. zu
Testzwecken oder für Kalibrierung
"Nebenläufige Systeme" stand 10.4.2019 6Was sind Sensoren?
• Überprüfen regelmäßig ihren Beobachtungsgegenstand z.B. nach
physikalischen Veränderungen (Temperatur, Entfernung…)
• Die meisten Sensoren in eingebetteten Systemen sind „passiv“, d.h.
sie haben eine Elektronik, die Energie einsetzt um jederzeit (auch
statische) Messwerte liefern zu können
• Der gemessene Wert kann je nach verbauter Elektronrik abgerufen
werden oder wird nach Änderungen kommuniziert (callback)
• Physikalische Messungen sind immer fehlerbehaftet
"Nebenläufige Systeme" stand 10.4.2019 7Architekturtypen der Kontrolleinheit in
eingebetteten Systemen
Regelschleife Reaktive Systeme
(Zeit-gesteuertes Design) (Ereignis-gesteuertes Design)
• Eingangssignale werden zyklisch • Verarbeiten Ereignisse direkt
abgefragt
(=Eingangssignale)
• Ausgangssignale werden auf der
Basis von Regeln über Zustand • Aperiodisch, sofort nach
zyklisch erzeugt auftreten der Ereignisse
• Der Zustand wird idR durch
Verarbeitung der Eingangssignale • Callback-Methoden verändern
verändert den Zustand und erzeugen ggf.
Klassischer Ansatz der Ausgangssignale
Regelungstechnik
"Nebenläufige Systeme" stand 10.4.2019 8Übung in Kleingruppe
Skizzieren Sie einen typischen Ablauf der Kommunikation zwischen
Kontrolleinheit und Sensor
• mit Regelschleife
• als reaktives System
in je einem UML timeline Diagramm, um die Unterschiede zu
demonstrieren
Präsentieren Sie Ihre Lösung an der Tafel
"Nebenläufige Systeme" stand 10.4.2019 9Übung in Murmelgruppe
Skizzieren Sie eine geeignete Systemarchitektur für die Kontrolleinheit
eines Fahrzeugs mit vier Ultraschallsensoren (an jeder Ecke eines) und
zwei Motoren (Antrieb und Lenkung) mit Regelschleife.
Wo sind sinnvolle Schnittstellen?
UML Klassendiagramm
Präsentieren Sie Ihre Lösung an der Tafel
"Nebenläufige Systeme" stand 10.4.2019 10Testen eingebetteter Systeme
• In eingebetteten Systemen werden (in Komponententests) die
Testobjekte gekapselt
• Als Testtreiber dienen SW-Simulationen der anderen
Komponenten
Software in the Loop (SiL)
Model in the Loop (MiL) Hardware in the Loop (HiL)
Testobjekt Mögliche
Testobjekte
Testtreiber
Testtreiber
als
SW-Simulation
"Nebenläufige Systeme" stand 10.4.2019 11Testen eingebetteter Systeme
Was ist was in unserem Projekt: Testobjekte und Testtreiber?
• Echte HiL-Tests sind nicht möglich, weil die Sensoren zur Messung der
Ausgabe der Aktoren fehlen
• Wir können trotzdem HiL-Szenarien als Eingabe verwenden und die
Ausgabe beobachten (GUI, Hardware), das ist kein Test!!!
• Vorgehen: Trennung von Input und Output im Testtreiber
• Diese HiL-Szenarien können wir auch für MiL-Tests nutzen
• In MiL-Tests können wir die Ausgabe softwareseitig aufnehmen und
überprüfen ein echter Test
"Nebenläufige Systeme" stand 10.4.2019 12Übung in Murmelgruppe
Skizzieren Sie eine geeignete Systemarchitektur für den MiL-Test der
Kontrolleinheit bei unserem Fahrzeug.
Hinweis: Tests werden gegen Schnittstellen geschrieben
Als UML Klassendiagramm
Präsentieren Sie Ihre Lösung an der Tafel
"Nebenläufige Systeme" stand 10.4.2019 13Organisatorisches
• Themenbereich „Testen“ nach ISTQB im Wintresemester
Nicht unbedingt erforderlich für „Mobile Roboter“
• Website aktualisiert
"Nebenläufige Systeme" stand 10.4.2019 14Wiederholung
• Was ist die Grundarchitektur eingebetteter Systeme?
• Wo sind dabei explizite Schnittstellen angebracht und warum?
• Zwischen welchen dieser Komponenten wird entweder Zeit-gesteuert
oder Ereignis-gesteuert kommuniziert?
• Wie kann die Ereignis-gesteuerte Kommunikation realisiert werden?
"Nebenläufige Systeme" stand 10.4.2019 15Wiederholung
• Was ist die Grundarchitektur eingebetteter Systeme?
• Wo sind dabei explizite Schnittstellen angebracht und warum?
• Zwischen welchen dieser Komponenten wird entweder Zeit-gesteuert
oder Ereignis-gesteuert kommuniziert?
• Wie kann die Ereignis-gesteuerte Kommunikation realisiert werden?
"Nebenläufige Systeme" stand 10.4.2019 16Nebenläufige Systeme
1. Eingebettete Systeme, Architektur und Signalverarbeitung
2. Wdh: Nebenläufige Programmierung und Synchronisierung in Java
3. Nebenläufige, synchronisierte und fehlertolerante Erfassung von
Sensorwerten
4. Modellierung von Agenten mit Zustandsautomaten (=statecharts)
"Nebenläufige Systeme" stand 10.4.2019 17Nebenläufige Threads in Java
Einzelübung (15 min): Schreiben Sie ein ausführbares Java Programm, das
zwei nebenläufige Threads startet, die jeweils für 5 Sekunden in zufälligen
Zeitabständen eine Ausgabe an der Konsole machen. Wenn beide Threads
fertig sind wird das vom Haupt-Thread ausgegeben
Wählen Sie einen folgender Ansätze:
a) Ihre Thread-Klasse erweitert java.lang.Thread z.B. als anonyme innere
Klasse
b) Ihre Klasse implementiert java.lang.Runnable und wird einem Thread-
Objekt im Konstruktor mitgegeben
c) Ihre Klasse implementiert java.lang.Runnable und wird von einem
java.util.concurrent.Executor-Objekt nebenläufig gestartet.
"Nebenläufige Systeme" stand 10.4.2019 18Agenda
• Nebenläufige Threads in Java
• Leser-Schreiber Probleme
• Ansatz 1: Unveränderbare Objekte
• Ansatz 2: Synchronisierung
• Schlossvariablen (Keyword „synchronized“)
• Semaphore (Klasse java.util.concurrent.Semaphore)
• Probleme: Deadlock, Livelock, Aushungern
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 19Leser Schreiber Probleme
• Wenn nebenläufige Threads auf gemeinsame Variablen zugreifen
entstehen Probleme
• Bsp: (c=c+1; | c=c-1; ) kann zu folgendem werden:
Thread A: Retrieve c.
Thread B: Retrieve c.
Thread A: Increment retrieved value; result is 1.
Thread B: Decrement retrieved value; result is -1.
Thread A: Store result in c; c is now 1.
Thread B: Store result in c; c is now -1.
• Demo: CounterApp.java
"Nebenläufige Systeme" stand 10.4.2019 20Agenda
• Nebenläufige Threads in Java
• Leser-Schreiber Probleme
• Ansatz 1: Unveränderbare Objekte
• Ansatz 2: Synchronisierung
• Schlossvariablen (Keyword „synchronized“)
• Semaphore (Klasse java.util.concurrent.Semaphore)
• Probleme: Deadlock, Livelock, Aushungern
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 21Ansatz 1: Unveränderbare (immutable)
Objekte
Der Zustand eines „Immutable Object“ kann nach der Erzeugung nicht mehr
verändert werden, dazu sollten folgende Regeln eingehalten werden
Alle Attribute „private final“
Keine setter
Überschreiben in Subklassen verbieten (Klasse „final“ deklarieren)
Wenn änderbare Objekte in Attributen referenziert werden, dann dürfen
keine Methoden zur Verfügung gestellt werden, die diese Objekte
verändern.
Wenn änderbare Objekte in Attributen referenziert werden, dann dürfen
diese nicht als Parameter an andere weitergegeben werden (vorher
clone()) wg. „Call-by-reference-Effekt“
In immuatble objects gibt es keine Leser-Schreiber Probleme!
"Nebenläufige Systeme" stand 10.4.2019 22Ansatz 1: Unveränderbare (immutable)
Objekte
Diskussion im Plenum:
1. Kann man Counter.java für immutable objects realisieren?
2. Welche Klassen kann man generell für immutable objects
realisieren, welche nicht?
3. Kann man die Steuerungskomponente eines mobilen Roboters als
immutable object realisieren?
"Nebenläufige Systeme" stand 10.4.2019 23Agenda
• Leser-Schreiber Probleme
• Ansatz 1: Unveränderbare Objekte
• Ansatz 2: Synchronisierung
• Schlossvariablen (Keyword „synchronized“)
• Semaphore (Klasse java.util.concurrent.Semaphore)
• Probleme: Deadlock, Livelock, Aushungern
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 24Ansatz 2: Synchronisierung
„Synchronisierung“ werden Techniken genannt, mit denen Leser-
Schreiber-Probleme durch Verhindern von Thread-Wechseln in den
kritischen Abschnitten verhindert wird:
Thread A: Retrieve c.
Thread A: Retrieve c.
Thread A: Increment retrieved value; result is 1.
Thread B: Retrieve c.
Thread A: Store result in c; c is now 1.
Thread A: Increment retrieved value; result is 1.
Thread B: Decrement retrieved value; result is -1.
Thread A: Store result in c; c is now 1. Thread B: Retrieve c.
Thread B: Store result in c; c is now -1 Thread B: Decrement retrieved value; result is -1.
Thread B: Store result in c; c is now -1
"Nebenläufige Systeme" stand 10.4.2019 25Synchronisierung mit Schlossvariablen
Eine Schlossvariable ist eine gemeinsame Variable (mutex), die Thread-
Wechsel für einen bestimmten Bereich (kritischer Abschnitt) verbietet
mutex.lock()
Thread A: Retrieve c.
Thread A: Increment retrieved value; result is 1.
Thread A: Store result in c; c is now 1.
mutex.release()
• Wenn Thread A mutex.lock() aufgerufen hat wartet der nächste
Thread (zB B), bis A mutex wieder frei gibt
• In Java: synchronized methods oder synchronized statements
"Nebenläufige Systeme" stand 10.4.2019 26Synchronized Methodes
Durch den Modifikator „synchronized“ können Methoden eines Objekts
miteinander synchronisiert werden
• Jedes Objekt enthält genau eine Schlossvariable
• Alle synchronized-Methoden der Klasse nutzen diese gemeinsam
• Fallstudie Counter.java
• Ist das Leser-Schreiber-Problem gelöst?
• Wie verhält sich die Laufzeit?
• Das funktioniert auch bei statischen Methoden (hier wird die
Schlossvariable im Class-Objekt der Klasse gehalten
"Nebenläufige Systeme" stand 10.4.2019 27Synchronized Statements
Synchronized Methodes sind nicht immer geeignet
• Es findet zu viel unnötige Synchronisierung statt, die das System
verlangsamt
• Eigentlich müssen oft nicht alle Methoden miteinander synchronisiert
werden, so dass man mehrere Schlossvariablen bräuchte (für jede
separate Funktionalität eine)
Synchronized statements erlauben die explizite Definition des
synchronisierenden Objekts für Sequenzen von Statements
Object lock_1 = new Object();
Bsp: public void addName(String name) {
synchronized(lock_1) { lastName = name; }
nameList.add(name);
} "Nebenläufige Systeme" stand 10.4.2019 28Beispiel Synchronized Statements
Übung in Kleingruppen Realisieren Sie einen Counter mit 2
Zählvariablen, die jeweils in 2 Threads verändert werden und messen
Sie die Performanz
1. Synchronisieren Sie alle Methoden
2. Synchronisieren Sie die kritischen Abschnitte über das Counter-
Objekt
3. Erstellen Sie zwei Objekte und synchronisieren jeweils zwei kritische
Abschnitte, so dass sie für jeden einzelnen Counter eine eigene
Schlossvariable einsetzen
"Nebenläufige Systeme" stand 10.4.2019 29Agenda
• Leser-Schreiber Probleme
• Ansatz 1: Unveränderbare Objekte
• Ansatz 2: Synchronisierung
• Schlossvariablen (Keyword „synchronized“)
• Semaphore (Klasse java.util.concurrent.Semaphore)
• Probleme: Deadlock, Livelock, Aushungern
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 30Semaphore
Semaphore erlauben den gleichzeitigen Zugriff mehrerer Objekte bis zu
einer definiert Maximalzahl auf einen kritischen Abschnitt
• Schlossvariablen sind Semaphore mit dem Wert 1
• In Java als Klasse java.util.concurrent.Semaphore realisiert (vgl. Java
API)
• Es bietet sich ein Ansatzpunkt für komplexere Synchronisierungen wie
• Threads benötigen unterschiedlich viele „permits“
• Fairness-Regeln bei der Vergabe des nächsten freien permit
•…
"Nebenläufige Systeme" stand 10.4.2019 31Wiederholung
• Wie werden in Java nebenläufige Threads gestartet?
• Wie kann man in Java einen Thread anhalten und warten lassen?
• Wie kann man einen Thread auf einen anderen warten lassen?
• Was sind immutable objects, warum sind sie beim Multithreading
interessant?
• Was ist das Leser-Schreiber-Problem, wann kann es auftreten?
• Wie kann man es verhindern?
"Nebenläufige Systeme" stand 10.4.2019 32Agenda
• Leser-Schreiber Probleme
• Ansatz 1: Unveränderbare Objekte
• Ansatz 2: Synchronisierung
• Schlossvariablen (Keyword „synchronized“)
• Semaphore (Klasse java.util.concurrent.Semaphore)
• Probleme: Deadlock, Livelock, Aushungern
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 33Probleme die durch Synchronisierung bzw.
Nebenläufigkeit entstehen
• Deadlock: z.B. A wartet auf B und B wartet auf A, oder mit mehr
Beteiligten im Zyklus (Bsp: speisende Philosophen)
Threads blockieren sich gegenseitig
• Livelock: z.B. A reagiert auf B und B reagiert auf die Reaktion von A
und B reagiert auf die Reaktion von A …
Threads sind nicht blockiert, aber zu beschäftigt um ihre Aufgaben wirklich
abzuschließen
• Aushungern (Starvation): z.B. A muss immer warten, weil andere
Threads aus der Warteschlange an der Semaphore/Schlossvariable
immer Vorrang bekommen
Threads kommen nie dazu ihre Arbeit zu machen
"Nebenläufige Systeme" stand 10.4.2019 34Probleme die durch Synchronisierung
entstehen
Übung in drei Kleingruppen (15 min)
Konstruieren Sie ein Beispiel in Java in dem ein
deadlock/livelock/starvation so auftritt, dass man das an der
Konsolenausgabe erkennen kann.
Präsentieren Sie das Beispiel im Plenum und…
• erklären Sie, welcher Thread dabei seine Arbeit nicht machen kann.
• erklären Sie, wie man das Problem lösen könnte
"Nebenläufige Systeme" stand 10.4.2019 35Probleme die durch Synchronisierung
entstehen
Diskussion im Plenum
Welche der folgenden Probleme können bei der Steuerung eines
mobilen Roboters auftreten und müssen in der Software adressiert
werden (wir gehen davon aus, dass Sensoren und Aktoren nebenläufig
gesteuert werden)
• Leser-Schreiber Problem
• Aushungern
• Verklemmungen
• Livelocks
"Nebenläufige Systeme" stand 10.4.2019 36Agenda
• Leser-Schreiber Probleme
• Ansatz 1: Unveränderbare Objekte
• Ansatz 2: Synchronisierung
• Schlossvariablen (Keyword „synchronized“)
• Semaphore (Klasse java.util.concurrent.Semaphore)
• Probleme: Deadlock, Livelock, Aushungern
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 37Zusammenfassung,
Best Practices in der nebenläufigen Programmierung
1. Benutzen Sie, wenn möglich, immer immutable objects
2. Synchronisieren Sie alle Variablen, die von nebenläufigen Threads
verändert werden könnten (auch wenn sie glauben, dass es keine
Probleme geben kann)
3. Synchronisieren Sie möglichst wenig, also nur das Schreiben von
Variablen, die laut Regel 2 synchronisiert werden müssen. Halten
Sie die kritischen Abschnitte möglichst klein.
4. Überlegen Sie genau, ob es zu deadlocks, livelocks oder starvation
kommen kann und verhindern Sie das durch geeignete
Abhängigkeiten und Scheduling der wartenden Threads.
"Nebenläufige Systeme" stand 10.4.2019 38Wiederholung
1. Warum muss die Steuerung eingebetteter Systeme oft nebenläufig
realisiert werden?
2. Welches Problem kann bei nebenläufigem Zugriff auf Variablen
auftreten?
3. Wie kann man dieses Problem als Programmierer vermeiden?
Ausblick: Klassische Synchronisationsprobleme (deadlock, livelock,
starvation) im WS
"Nebenläufige Systeme" stand 10.4.2019 39Nebenläufige Systeme
1. Eingebettete Systeme, Architektur und Signalverarbeitung
2. Wdh: Nebenläufige Programmierung und Synchronisierung in Java
3. Fehlertolerante Erfassung von Sensorwerten
4. Modellierung von Agenten mit Zustandsautomaten (=statecharts)
"Nebenläufige Systeme" stand 10.4.2019 40Agenda
• Begriffsklärung und Anforderungsspezifikation
• Methoden zur Fehlertoleranz
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 41Zuverlässigkeit eingebetteter Systeme
Diskussion im Plenum: Was ist Softwarezuverlässigkeit?
"Nebenläufige Systeme" stand 10.4.2019 42Definition Softwarezuverlässigkeit
• Lt. ISO 25010 ist Softwarezuverlässigkeit ein Qualitätsmerkmal eines
Softwareprodukts
• SW-Zuverlässigkeit := die Fähigkeit von SW, ihre Funktion und Leistung über
einen festgelegten Zeitraum unter definierten Bedingungen aufrecht zu
erhalten
• Dazu gehört (Zitat):
• Fehlertoleranz: Fähigkeit, ein spezifiziertes Leistungsniveau bei Software-Fehlern
oder Nicht-Einhaltung ihrer spezifizierten Schnittstelle zu bewahren.
• Konformität: Grad, in dem die Software Normen oder Vereinbarungen zur
Zuverlässigkeit erfüllt.
• Reife: Geringe Versagenshäufigkeit durch Fehlerzustände.
• Wiederherstellbarkeit: Fähigkeit, bei einem Versagen das Leistungsniveau
wiederherzustellen und die direkt betroffenen Daten wiederzugewinnen. Zu
berücksichtigen sind die dafür benötigte Zeit und der benötigte Aufwand.
"Nebenläufige Systeme" stand 10.4.2019 43Verallgemeinerung: Zuverlässigkeit
eingebetteter Systeme
• Def: Die Zuverlässigkeit eines technischen Systems ist eine
Eigenschaft, die angibt, wie verlässlich eine dem System zugewiesene
Funktion in einem Zeitintervall erfüllt wird.
• In Eingebetteten Systemen ist die Zuverlässigkeit eine Produkt aus der
Zuverlässigkeit der Software und der Zuverlässigkeit der Hardware
"Nebenläufige Systeme" stand 10.4.2019 44Kurzreferat Zuverlässigkeit
Fallstudie in Kleingruppen
Wie sichert das Bundesamt für kerntechnische Entsorgungssicherheit die
Zuverlässigkeit von Kernkraftwerken?
Lesen Sie:
https://www.bfe.bund.de/DE/kt/sicherheit/gremien/normen/normen_node.
html
Dann erstellen Sie einen Kurzvortrag ( ~2 Folien, ~3 Minuten) zu
- DKE Gremium K132: DIN EN 62628 (Über Bibo erhältlich)
- VDI Fachausschuss 510: Richtlinie 4011 (im Internet erhältlich)
"Nebenläufige Systeme" stand 10.4.2019 45Und was bedeutet das für uns?
• Die Zuverlässigkeit der Hardware können wir mit Lego nicht beeinflussen.
• Messfehler der Sensoren
• Ungenaue Mechanik bei Lenkung
• Ungenaue Realisierung von Steuersignalen der Aktoren (zB Motoren)
• ..
• Wir erhöhen deswegen die Zuverlässigkeit des Systems durch
Fehlertoleranz der Software gegen Fehler/Ungenauigkeiten der Hardware
1. Fehlerquellen identifizieren
2. Fehlerwahrscheinlichkeit ermitteln
3. Auswirkungen von Fehlern ermitteln
4. Geeignete Fehlertoleranz implementieren
"Nebenläufige Systeme" stand 10.4.2019 46Agenda
• Begriffsklärung und Anforderungsspezifikation
• Methoden zur Fehlertoleranz
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 47Aufgaben Fehlertoleranz
1. Fehlerquellen identifizieren
2. Fehlerwahrscheinlichkeit und -größe ermitteln
3. Auswirkungen von Fehlern ermitteln
4. Geeignete Fehlertoleranz implementieren
"Nebenläufige Systeme" stand 10.4.2019 48Wiederholung
• Was versteht man unter Softwarezuverlässigkeit?
• Was unter Zuverlässigkeit technischer Systeme?
• Was sollte man ermitteln, bevor man Fehlertoleranz implementiert?
"Nebenläufige Systeme" stand 10.4.2019 49Fehler der Legobauteile
Miniprojekt in Kleingruppen (Jetzt Präsentationen)
• Messen Sie die Fehlerwahrscheinlichkeit und -größe folgender Bauteile
• Ultraschallsensor
• Motor
• Farbsensor
• In einem Test sprechen Sie das Bauteil an und vergleichen seine
Messung/Aktion mit der Realitiät/Ansteuerung durch SW
• Führen Sie ausreichend viele Tests durch und erstellen Sie Messreihen zur
Eingabe zB in Excel
• Testen Sie unter verschiedenen, möglichst realistischen Bedingungen
• Interpretieren Sie Ihre Ergebnisse hinsichtlich des Einsatzes „Ihres“ Bauteils
in einem autonomen Fahrzeug
"Nebenläufige Systeme" stand 10.4.2019 50Implementierung von Fehlertoleranz
Implementierung von Fehlertoleranz ist notwendig,
• wenn Fehler negative Auswirkungen auf die geforderte
Zuverlässigkeit haben
• wenn das Fehlerrisiko (Wahrscheinlichkeit * Kosten) den Aufwand
der Implementierung rechtfertigt
An welchen Stellen ist also bei unseren mobilen Robotern
Fehlertoleranz empfehlenswert?
"Nebenläufige Systeme" stand 10.4.2019 51Implementierung von Fehlertoleranz
Methoden der Implementierung nach DIN EN 62628
• Fehler „eindämmen oder einsperren“
• Fehlererkennung
• Erholung nach einem Fehler
• Entwurfsdiversität
"Nebenläufige Systeme" stand 10.4.2019 52Implementierung von Fehlertoleranz:
1. Fehler „eindämmen und einsperren“
„Die Software wird dergestalt geschrieben, dass beim Auftauchen eines
Fehlers dieser keine anderen Abschnitte der Software über die lokale
Domäne hinaus, in der er eingetreten ist, kontaminieren kann.“ [DIN]
Diskussion im Plenum
Welche Mechanismen des Software-Entwurfs können hier verwendet
werden?
Wie sieht das bei der Steuerung unserer mobilen Roboter aus?
• Fehler der Sensoren
• Fehler der Aktoren
"Nebenläufige Systeme" stand 10.4.2019 53Implementierung von Fehlertoleranz:
1. Fehler „eindämmen und einsperren“
• Strenge Kapselung zB mit Interfaces
• Interface-Methoden fangen alle Exceptions (auch unchecked) aus
ihrer Komponente (Impl. zB mit Adapter pattern)
• Überprüfung der Parameter und Vorbedingungen in Interface-
Methoden
• Synchronisierung
•…
"Nebenläufige Systeme" stand 10.4.2019 54Implementierung von Fehlertoleranz:
2. Fehlererkennung
„Die Software wird dergestalt geschrieben, dass sie selbst auf das
Vorhandensein von Fehlern prüft und bei deren Eintreten darauf
reagiert.“ [DIN]
Diskussion im Plenum
Wie kann man im Betrieb auf Fehler (oder vermutliche Fehler) prüfen?
Welche Prüfungen können wir für die Sensoren in unseren mobilen
Robotern realisieren?
"Nebenläufige Systeme" stand 10.4.2019 55Implementierung von Fehlertoleranz:
2. Fehlererkennung
• Einsatz von Analysewerkzeugen
• Plausibilitätsprüfungen mit temporaler Diversität (Messwerte mit
vorherigen Werten abgleichen, redundante Messungen dazu
durchführen)
• Plausibilitätsprüfung mit Datendiversität (Werte runden, redundanter
Einsatz unterschiedlicher Datentypen)
•…
"Nebenläufige Systeme" stand 10.4.2019 56Implementierung von Fehlertoleranz:
3. Erholung nach einem Fehler
„Die Software wird dergestalt geschrieben, dass sie nach dem Erkennen
eines Fehlers selbst ausreichende Maßnahmen einleitet, die es der
Software erlaubt, weiterhin erfolgreich zu funktionieren.“ [DIN]
Diskussion im Plenum
Welche Mechanismen sollte man implementieren?
Was könnten bei unseren mobilen Robotern „ausreichende
Maßnahmen“ nach Messfehlern sein?
"Nebenläufige Systeme" stand 10.4.2019 57Implementierung von Fehlertoleranz:
3. Erholung nach einem Fehler
• Geeignete Exception-Handler, die für den Betrieb und nicht so sehr
für den Programmierer relevant sind
• Rückfalllösungen für Messwerte (zB Werte aus vorherigen
Messungen, Default-Werte)
• Rückfalllösungen für Aktionen (zB möglichst sichere Aktion
durchführen, wenn Sensordaten fehlen)
•…
"Nebenläufige Systeme" stand 10.4.2019 58Implementierung von Fehlertoleranz:
4. Entwurfsdiversität
„ Software und ihre Daten werden so geschaffen und gestaltet, dass es
nötigenfalls Rückfalllösungen gibt.“ [DIN]
Diskussion im Plenum
Welche Mechanismen sollte man implementieren?
Was könnten bei unseren mobilen Robotern „ausreichende
Maßnahmen“ nach Messfehlern sein?
"Nebenläufige Systeme" stand 10.4.2019 59Implementierung von Fehlertoleranz:
4. Entwurfsdiversität
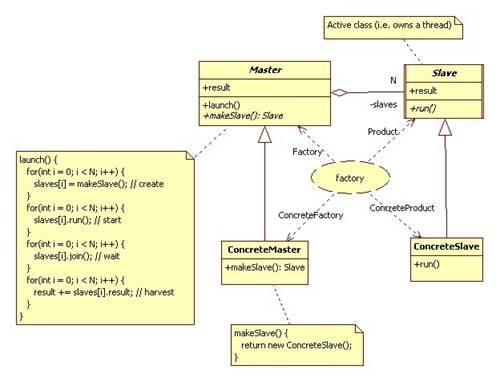
• Mehrere Verfahren nebenläufig ausführen (Master-Slave-Pattern
[POSA1])
• Voting von Slaves oder gänzlich getrennten Systemen
"Nebenläufige Systeme" stand 10.4.2019 60Master-Slave Pattern [POSA1]
Quelle:[cs.sjsu.edu]
"Nebenläufige Systeme" stand 10.4.2019 61Agenda
• Begriffsklärung und Anforderungsspezifikation
• Methoden zur Fehlertoleranz
• Best Practices
"Nebenläufige Systeme" stand 10.4.2019 62Best Practices
Hardware und Software funktionieren nicht immer so wie sie
spezifiziert ist!
• Untersuchen Sie die Zuverlässigkeit der Komponenten.
• Identifizieren Sie Fehlerquellen und beseitigen sie, wenn möglich.
• Bei bleibenden Fehlerquellen beurteilen Sie Fehlerwahrscheinlichkeit,
Risiko und Aufwand zur Implementierung von Fehlertoleranz
• Implementieren Sie ggf. Fehlertoleranz durch
• Kapselung
• Prüfung von Werten (Plausibilität oder Analysewerkzeuge)
• Wirkungsvolle Fehlerbehandlung (Exception-Handler)
• Diversität in Zeit, Daten, Verfahren
"Nebenläufige Systeme" stand 10.4.2019 63Nebenläufige Systeme
1. Eingebettete Systeme, Architektur und Signalverarbeitung
2. Wdh: Nebenläufige Programmierung und Synchronisierung in Java
3. Nebenläufige, synchronisierte und fehlertolerante Erfassung von
Sensorwerten
4. Modellierung von Agenten mit Zustandsautomaten (=statecharts)
"Nebenläufige Systeme" stand 10.4.2019 64Wir sehen uns im WS wieder
Projekt: autonomes Fahrzeug
• Fehlertolerante, nebenläufige Erfassung und Verarbeitung von
Sensorwerten
Weitere Themen:
• Testen nach ISTQB, Anwendung auf Embedded Systems
• Probleme durch Synchronisierung und deren Lösung
• Modellierung mit Zustandsdiagrammen
• Automatisierung von Build- und Deploymentprozessen
"Nebenläufige Systeme" stand 10.4.2019 65Sie können auch lesen