Haptische Technologien - VDC-Whitepaper - VDC Fellbach
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
VDC-Whitepaper
Haptische Technologien
Dr.-Ing. Dipl.-Kfm. Christoph Runde
Franziska Jöckel
Virtual Dimension Center (VDC)
Fellbach
Auberlenstr. 13
70736 Fellbach
www.vdc-fellbach.de
© Competence Centre for Virtual Reality and Cooperative Engineering w. V. – Virtual Dimension Center (VDC)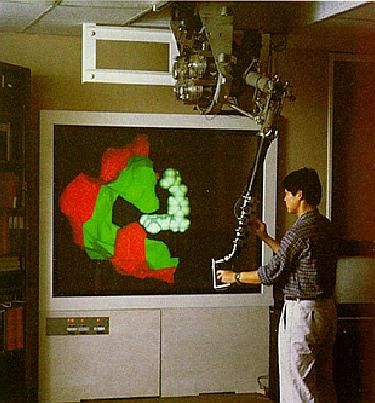
Grundlagen
Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Grundlagen
VR hatte immer den Anspruch, möglichst multi-modal zu sein, also viele Sinneskanäle
anzusprechen, um so das Erleben möglichst realistisch werden zu lassen
Die Haptik ist die Lehre der Haut- und Haltungssinne (abgeleitet vom griechischen Wort
"haptós" oder "haptikós", was "fühlbar" bedeutet)
Die Hautsinne (somatosensorisches System) ermöglichen es dem Menschen
o Temperatur (Warm- und Kalt-Rezeptoren),
o Schmerz (freie Nervenendungen (Norizeptoren))
o und taktile Reize (Druck Merkel-Zellen und Ruffini-Körperchen, Berührung Meissner-
Körperchen und Haarfollikelrezeptoren, Vibrationen Vater-Pacini-Körperchen) der Haut
wahrzunehmen.
Quelle: VDC Fellbach
2
Grundlagen
Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Grundlagen
Auch die die Haltungssinne können weiter
unterteilt werden:
o Der Stellungssinn generiert Informationen über die
Position des Körpers im Raum und die Stellung
der Gelenke und des Kopfes (Ruffini-Körperchen)
o Der Bewegungssinn ermöglicht die
Bewegungsempfindung und das Erkennen der
Bewegungsrichtung
o Der Kraftsinn liefert Informationen über den
Quelle: VDC Fellbach
Spannungszustand von Muskeln und Sehnen
o Das Gleichgewichtsorgan im Innenohr ermöglicht
die vestibuläre Wahrnehmung
3
Grundlagen
Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Grundlagen
Das Ziel der haptischen Technologien in der
virtuellen Realität ist zum einen die Ausgabe der
Kräfte aus der virtuellen Welt (haptisches
Rendering) und zum anderen die Annahme und
Übertragung von Benutzereingaben durch die
taktilen oder kinästhetischen Eingabegeräte
Typischerweise besteht ein haptischer Rendering-
Algorithmus aus zwei Teilen:
(a) Kollisionserkennung und (b) Kollisionsantwort Quelle: C. Basdogan, M. A. Srinivasan
Die in der Abbildung dargestellte haptische
Schleife erfordert eine Aktualisierungsrate von
etwa 1 kHz für eine stabile Kraftwechselwirkungen;
um dieser Anforderung gerecht zu werden, sind
rechnerisch schnelle Kollisionserkennungs- und
Reaktionstechniken erforderlich
4
Grundlagen
Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Grundlagen
Im Vergleich zu Audio- und visuellen Kanälen, die unidirektionale
Informationen und Energiefluss (von der Simulationsmaschine zum
Benutzer) bieten, tauscht die haptische Modalität Informationen und
Energie in zwei Richtungen aus - vom Benutzer und auf den Benutzer
Diese Bidirektionalität wird oft als das wichtigste Merkmal der
haptischen Interaktionsmodalität bezeichnet
Basisarchitektur für eine
Virtual-Reality-Anwendung,
die visuelles, auditives und
haptisches Feedback
beinhaltet
Quelle: Salisbury, Conti, Barbagli; 2004
5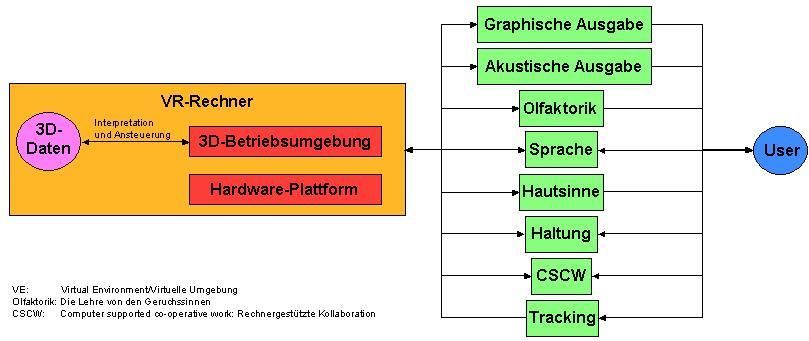
Grundlagen
Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Grundlagen
Interaktionsprinzip:
Manipulation des Endeffektors des haptischen
Schnittstellengeräts
Positionssensoren des Geräts übermitteln ihre Position an den
Computer
Die Position des Endeffektors korreliert mit einem virtuellen
Avatar und aktualisiert ihn entsprechend
In bestimmten Zeitintervallen prüft der Computer auf Kollisionen
zwischen dem Endeffektor und den virtuellen Objekten
Wenn eine Kollision stattgefunden hat, berechnet das
haptische Wiedergabesystem die Reaktionskräfte / -
Solange keine Kollision erkannt wird, werden keine
momente, die an dem Interaktionspunkt auftreten sollten,
Kräfte berechnet und angewendet, und der Benutzer
und befiehlt den an der Vorrichtung angebrachten
kann das haptische Gerät frei bewegen
Aktuatoren, sich zu bewegen, was eine taktile
Wahrnehmung der virtuellen Objekte bewirkt
6
Grundlagen
Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Grundlagen
Haptik-Systeme in der Virtual Reality verfolgen das Ziel, den Menschen auch haptisch in
die VR zu integrieren. Dazu sind verschiedene technische Komponenten erforderlich:
o Tracking
o Verarbeitung der Tracking-Daten
o Kollisionsantwort
o Haptische Ausgabe
Problem: Es müssen Mechanismen gefunden werden, um den stabilen Betrieb aktiv-
angetriebener Haptik-Systeme zu gewährleisten, damit diese nicht permanent zwischen
den Zuständen „Maximalkraft“ (bei erkannter Kollision) und „kraftlos“ (bei fehlender
Kollision) oszillieren Systemisch werden dafür „weiche“ virtuelle Oberflächen benötigt
Quelle: VDC Fellbach
7
Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Haptische Geräte
Haptische Geräte zeichnen sich durch zwei Hauptmerkmale aus: den Freiheitsgrad und
die haptische Bildwiederholfrequenz
Der Freiheitsgrad bezieht sich auf die Anzahl der unabhängigen Achsen, um die das
Gerät Kraft oder Drehmoment ausüben kann; die verfügbaren Geräte reichen von
solchen, die ungerichtete Kräfte wie Vibrationen erzeugen können, bis zu Geräten mit 6
Freiheitsgraden, die Kräfte entlang aller drei Raumachsen aktivieren können
Die haptische Bildwiederholfrequenz repräsentiert die maximale Geschwindigkeit, mit
der die Gerätehardware Kräfte oder Drehmomente für den Benutzer erzeugen kann
Folgende Bauarten werden auf den nächsten Folien näher betrachtet:
o Reine Eingabesysteme
o Taktile Ausgabesysteme
o Erdbasierte Kraftausgabe-Systeme
o Körperbasierte Kraftausgabe-Systeme
o Unbasierte Kraftausgabe-Systeme
o Anthropometrische 3D-Menschmodelle
8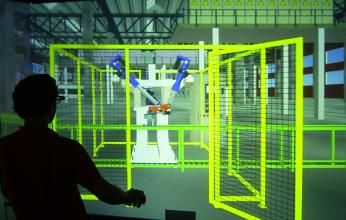
Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Bauarten von Haptik Systemen
Reine Eingabesysteme
Eingabesysteme bilden die Funktion des Trackings ab. Sie erfassen die Position und
Orientierung der Hand sowie die Stellung der Finger. Einsatz verschiedener Technologien:
Spacemouse Datenhandschuh mit
optischen Tracking
Quelle: 3D Connexion
Quelle: A.R.T.
6-DOF-Controller Spacemouse
Datenhandschuh mit Infrarot
3D-Controller RGBD-Kameras
Quelle: Oculus
Quelle: Leap Motion
Touch-Controller
Gestenerkennung durch Tiefenbildkamera
Datenhandschuhe mit
Myoelektrische Mess-
Dehnmessstreifen
Systeme
Quelle: Hi5
Quelle: Thalmix Labs
Hi5 VR GLOVE und
Valve/HTC Vive Tracker Myo-Armband
9
Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Bauarten von Haptik Systemen
Taktile Ausgabesysteme
Taktile Ausgabesysteme geben lediglich Vibrations- oder Stoßsignale an den Benutzer aus.
Besonders vorteilhaft sind die teils sehr kleinen Bauformen, nicht notwendige Infrastruktur,
die einfache Ansteuerung sowie die erzielbare modale Nähe.
Taktile Westen Taktiler Ultraschall
Quelle: Ultrahaptics
Auf Ultraschall basierendes taktiles
Quelle: IFTECH Ausgabe-Array
Taktile Weste Araig
Taktile Handschuhe Braille-Displays
Quelle: CyberGlove Systems Quelle: FZI Karlsruhe
Taktiler Datenhandschuh CyberTouch Braille-Display
Bass-Shaker Taktile Gelenkarme
Quelle: Algo Sound, Inc. Quelle: SenseAble
Vibrationsquelle AST-2B-4 Pro Bass Shaker Phantom-Display
10Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Bauarten von Haptik Systemen
Erdbasierte Kraftausgabe-Systeme
Erdbasierte Systeme zeichnen sich dadurch aus, dass die Gegenkraft durch den Erdboden
oder mit ihm verbundene Installationen aufgebracht wird. Damit lassen sich echte, absolute
Kräfte auf den Benutzer übertragen.
Beispiele für erdbasierte Haptiksysteme sind:
Joysticks und Erdbasierte SPIDARs
HOTAS
Quelle: Haption
Quelle: Logitech
Seilzug-Roboter SPIDAR
Logitech G Saitek ProFlight
X56 Rhino Joystick Flightstick
Gelenkarmsysteme Luft-Druckimpuls
Quelle: Disney Research
Quelle: Haption
Disney Research Aireal
Gelenkarmsystem Virtuos
11Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Bauarten von Haptik Systemen
Körperbasierte Kraftausgabe-Systeme
Körperbasierte Haptiksysteme zeichnen sich dadurch aus, dass sowohl die auszugebende
Kraft, als auch die Gegenkraft auf den Körper des Benutzers einwirken. Der Benutzer spürt
damit an einzelnen Extremitäten Kraft, jedoch kompensieren sich alle auf ihn durch das
Haptiksystem einwirkenden Kräfte vollständig.
Arm-Exoskelette
Quelle: Novint
Exoskelett XIO
Finger-Exoskelette
Quelle: Immersion
Force-Feedback-Handschuh CyberGrasp
Körperbasierte SPIDARs
Quelle: Haption
Tragbares SPIDAR-System
12Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Bauarten von Haptik Systemen
Unbasierte Kraftausgabe-Systeme
Es gibt einige wenige technische Ansätze, Kräfte und Momente zu erzeugen und dabei auf
eine Basierung gänzlich zu verzichten. Dieses sind die so genannten unbasierten Haptik-
Systeme. Systemisch sind diese Aufbauten interessant, da sie keine fixe (einschränkende)
Infrastruktur zum Erdboden benötigen, aber dennoch absolute (also nicht kompensierte)
Kräfte bzw. Momente erzeugen können.
Rückstoßsysteme
Force-Feedback-Handschuh nach dem
Rückstoßprinzip
Gyros
Quelle: Yano, M. Yoshie, H.
Iwata bzw. Y. Tanaka et al.
Gyro Moment Display oder GyroCube
13Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Bauarten von Haptik Systemen
Anthropometrische 3D-Menschmodelle
Eine andere Herangehensweise zur Evaluation haptischer
Produkteigenschaften - damit aber doch im Wettbewerb mit
haptischen Ein-/Ausgabesysemen - ist die Verwendung von
anthropometrischen 3D-Menschmodellen
Diese werden standardmäßig in der Fahrzeug- und Textilindustrie
eingesetzt
Über länderspezifische Reihenmessungen werden statistisch Die 3D-Menschmodelle Human
Builder (Dassault Systèmes), Jack
solide Daten zur Abbildung ganzer Bevölkerungen (so genannte (Siemens PLM) und RAMSIS
(Human Solutions)
Perzentile) erzeugt
Anthropometrische 3D-Menschmodelle sind in der Lage, valide,
objektive (d.h. unabhängig vom jeweiligen Nutzer) und belastbare
Aussagen zu Sichtbarkeit, Erreichbarkeit, Zugänglichkeit,
Passform, Komfort und/oder Ergonomie zu treffen
14Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Software - Komponenten
Für den Betrieb eines Haptik-Systems sind verschiedene Software-Komponenten
essentiell:
Tracking: Eine Software zur Positionsermittlung aus den Sensordaten des externen
Trackingsystems und der Finger relativ zur Hand (Tracking-System-Lieferanten).
Kollisionserkennung: Eine Kollisionserkennung, die ermittelt, ob ein Finger eine 3D-
Geometrie durchdringt ist erforderlich. Kollisionserkennungen werden vor extreme
Anforderungen gestellt, da es gilt, ggf. hunderttausende oder Millionen von Polygonen
(koplanare Fläche in der 3D-Szene) mit weiteren, ggf. hunderttausenden oder Millionen
von Polygonen auf Kollision zu überprüfen, und zwar zur Laufzeit.
Haptik-Software: Die Haptik-Software entwickelt aus der erkannten Kollision, ggf. unter
Verwendung weiterer Informationen (etwa: Eindringtiefe bei Kollision), die
Kollisionsantwort. Dazu zählen weitere Objekttransformationen, das Greifen, die
Errechnung des Kraftvektors sowie die haptische Ausgabe.
Haptik-SDKs beinhalten für gewöhnlich die Kollisionserkennung, umgekehrt kann man
aus Kollisionserkennungen Haptik SDKs ableiten
15Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Aktive versus passive Kraftausgabesysteme
Im Bereich der Kraftrückkopplung werden aktive und passive haptische Systemen
unterschieden:
o Aktive haptische Systeme besitzen Motoren oder irgendeine andere Art von Aktuator, der aktiv
angetrieben wird und damit durch sich selbst auf den Menschen einwirkt. Der Aktuator übt so
beispielsweise von sich aus eine Kraft auf den Menschen aus oder stimuliert dessen Haut.
o Passive haptische Systeme hingegen bremsen und blockieren hingegen lediglich die
Bewegung des Menschen. Damit reflektieren sie also nur die Kraft, die der Mensch auf sie
ausübt.
Vergleich der Vor- und Nachteile:
Aktive Systeme Passive Systeme
Vorteile: Nachteile:
• Nur aktive, erd-basierte Systeme können externe Kräfte • Keine externen Kräfte darstellbar, da nur Kraft-reflektierend
simulieren • Haptisches Explorieren der Umgebung funktioniert nur,
• Handschuhe: haptische Exploration auch ohne aktive wenn adressierte Extremitäten permanent artikuliert werden
Fingerbewegungen möglich
Nachteile: Vorteile:
• Alle Objekte und Oberflächen mit einer gewissen Elastizität • Darstellbare Härte größer
• Tendenziell schwerer aufgrund von Antrieben • Tendenziell leichter, da schwere Antriebe entfallen
• Komplexe Haptik-Software • Einfachere Kollisionserkennung einsetzbar
• Schutzeinrichtungen, Notaus-Prozedur • Keine Sicherheitsmaßnahmen erforderlich
16Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Abschätzung der Anwendungsreifegrade verschiedener
Haptik-Konzepte - TRL
Der TRL (Technology Readiness Level) ist eine Skala zur Bewertung des
Entwicklungsstandes von neuen Technologien auf der Basis einer systematischen Analyse.
Er gibt auf einer Skala von 1 bis 9 an, wie weit entwickelt eine Technologie ist.
Beschreibung der Stufen (in Klammern Zeit bis zur Marktreife):
TRL 1: Beobachtung und Beschreibung des Funktionsprinzips (8–15 Jahre)
TRL 2: Beschreibung der Anwendung einer Technologie
TRL 3: Nachweis der Funktionstüchtigkeit einer Technologie (5–13 Jahre)
TRL 4: Versuchsaufbau im Labor
TRL 5: Versuchsaufbau in Einsatzumgebung
TRL 6: Prototyp in Einsatzumgebung
TRL 7: Prototyp im Einsatz (1–5 Jahre)
TRL 8: Qualifiziertes System mit Nachweis der Funktionstüchtigkeit im Einsatzbereich
TRL 9: Qualifiziertes System mit Nachweis des erfolgreichen Einsatzes
17Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsreifegrade verschiedener Haptik-Konzepte
18Grundlagen Haptik-Systeme
Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsreifegrade verschiedener Haptik-Konzepte
19Grundlagen Haptik-Systeme Anwendungsfelder
Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsfelder
Mensch-Computer-Interaktion
Haptische Systeme können als Eingabegeräte, also im
Sinne eines Mensch-Computer-Interfaces eingesetzt Nutzer mit A.R.T..
Flystick 2
Quelle: VDC Fellbach
werden:
Blick auf die
3D-Konstruktion mit Spacemäusen Interaktionsfläche
des
Navigation und Manipulation in Virtual Reality mit Fabrikplanungs-
tisches des
3D-Controllern Quelle: Fraunhofer IPA
Fraunhofer IPA
Planungstische (tangible Eingaben) zur Designerin bei
Fabrikhallenlayout-Planung der Arbeit mit
einem
3D-Modellierung mit Force-Feedback- haptischen
Sketching-
Gelenkarmsystemen Quelle: Geomagic System
Implizite Roboter-
Roboter-Programmierung Programmierung
mit
kraftrückkoppelnd
em SPIDAR-
System am
Quelle: VDC Fellbach
Fraunhofer IPA
20Grundlagen Haptik-Systeme Anwendungsfelder
Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsfelder
Kraftdarstellung / Kraftdisplay
Die University of North Carolina setzte bereits
1967 ein selbst entwickeltes haptisches Display
mit 6 Freiheitsgraden ein, das molekulare
Bindungskräfte kräftetechnisch abbilden konnte
Zur Berechnung diente ein Drahtgittermodell Haptisches Display
Grope III der
von Molekülen University of North
Carolina aus dem
Einsatzzweck dieses Systems war allein die
Quelle: University of
Jahr 1967
North Carolina
anschauliche Darstellung von Bindungskräften
in der Lehre
21Grundlagen Haptik-Systeme Anwendungsfelder
Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsfelder
Unterstützung motorischer Körperfunktionen
Haptik-Systeme, die bestimmte Bewegungsabläufe
unterstützen und / oder andere Bewegungsabläufe Einsatz des
einschränken, können als Unterstützungssysteme für Quelle: Ottobock Exoskeletts Paexo
den Menschen eingesetzt werden:
Hebehilfen für die Produktion
Rehabilitation
“MAHI Exo-II”
Exoskelett
Quelle: French, Rose, O‘Malley (2015)
Einsatz einer
Haptic
Workstation zur
Behandlung von
Schlaganfall-
Patienten
Quelle: Blundell
22Grundlagen Haptik-Systeme Anwendungsfelder
Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsfelder
Fernwirkung / Telepräsenz
Sollen manuelle Operationen, die haptisches Haptisches
Feingefühl erfordern, über Distanz durchgeführt Telepräsenzsystem
bei AREVA für die
werden („Tele Operations“), so können zu diesem Arbeit in
Atomreaktoren
Zweck haptische Ein-/Ausgabegeräte eingesetzt Quelle: AREVA
werden:
Wartung von Atomkraftwerken
Tele-chirurgischer
Tele-Medizin Eingriff mit zwei
Force-Feedback-
Gelenkarm-
Quelle: Haption systemen
23Grundlagen Haptik-Systeme Anwendungsfelder
Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsfelder
Virtual Prototyping haptischer
Produkteigenschaften (1/2)
Versuchsaufbau
Das virtuelle Prototyping zielt darauf ab, zum Haptik-
Prototyping von
möglichst viele Produkteigenschaften und - Drehschalter
funktionen in frühen (digitalen) Phasen der Quelle: Hochschule für Gestaltung, Schwäbisch Gmünd
Produktentwicklung bereits überprüfen zu
können. So sollen etwaige Fehler korrigiert oder Versuchsaufbau
zum Haptik-
auch nur das Produkt optimiert werden, bevor Prototyping einer
PKW-
teure Produktionsinfrastruktur (z. B. Gießformen, Quelle: Fraunhofer IPK Kofferraumklappe
Presswerkzeuge) teuer erstellt wurde.
Prototyping Anwendungsfelder:
Prototyping von Tast- und Drehschaltern
Prototyping von PKW-Heckklappen Prototyping PKW-
Innenraum
Quelle: Daimler
Prototyping PKW-Innenraum
24Grundlagen Haptik-Systeme Anwendungsfelder
Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsfelder
Virtual Prototyping haptischer
Produkteigenschaften (2/2)
Prototyping Montageprozess Haptische
Prototyping beidhändiger Montageprozess Montage-
Evaluation bei
Prototyping Textilien Quelle: Haption
Airbus
Beidhändige
Montagesimulation
ohne Force
Quelle:ESI Feedback
Hardware zur
haptischen
Abbildung von
Textilen im
Projekt Haptex
Quelle:Haptex
25Grundlagen Haptik-Systeme Anwendungsfelder
Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsfelder
Training haptischer Fähigkeiten und Fertigkeiten
Es gibt unzählige Arbeitsvorgänge, in denen
bestimmte haptische Fähigkeiten und Fertigkeiten Putz-Trainer von
St. Gobain
Quelle: St.Gobain
gefragt sind. Hier liegt es nahe, diese Vorgänge mit
Hilfe haptischer Ein-/Ausgabegeräte virtuell zu
trainieren:
Klebstoffbahn-
Training für das Verputzen Quelle: PSA
Trainer
Training für Klebstoff-Applikation
Montage-Training
Training für Rhinoskopie, Ophtalmoskopie, Quelle: Airbus
Montage-Trainer
von Airbus
Ophtalmochirurgie, Arthroskopie, Hysteroskopie,
vitro-retinale Eingriffe, Katarakt, Koloskopie und Ophtalmo-
chirurgische
Zahnmedizin Simulations-
umgebung eyesi:
Ophtalmo-
Quelle: VRmagic Chirurgie
26Grundlagen Haptik-Systeme Anwendungsfelder
Anwendungsfelder Marktanalyse Zusammenfassung
Anwendungsfelder
Spiele, Unterhaltung
Spiele mit 3D-Controllern Daten-
handschuh zur
Spiele mit Datenhandschuh Quelle: Nintendo
Unterhaltung:
der P5
Spiele mit Force-Feedback-Gelenkarm
Spiele mit Waffen-Nachbildungen
3D-Controller in
Spiele mit haptischer Weste der Form von
Waffen im
Einsatz
Quelle: Void
Haptische Weste,
die taktiles
Feedback auf
den
menschlichen
Rumpf ausübt
Quelle: woojer
27Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Marktanalyse
Der Haptik-Markt insgesamt ist ein Wachstumsmarkt; im Markt für Haptik-Systeme zum
Einsatz in Virtual Reality und Augmented Reality gibt es zurzeit wie im gesamten
VR/AR-Umfeld verstärkte Gründungsaktivitäten
Haptische Ausgaben durchdringen das Alltagsleben immer stärker; dies resultiert in
Skaleneffekten für die kostengünstige Herstellung von Komponenten
Der dynamischere Markt wird mutmaßlich nicht der Markt der taktilen, sondern der
Force-Feedback-Aktuatoren sein
Durch die starke Durchdringung der Industrie mit Head Mounted Displays werden auch
Datenhandschuhe seit wenigen Jahren wieder interessant
Der VR-Haptik-Markt ist von starkem Wettbewerb und einer hohen
Entwicklungsdynamik geprägt
Der VR-Haptik-Markt weist teils eine starke Spezialisierung auf, was die
Lösungsfähigkeiten angebotener Produkte angeht; in medizinischen Anwendungen ist
die Spezialisierung als sehr hoch einzustufen
28Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Marktanalyse
Ein am Markt erfolgreiches Produkt wird sich in dem Spannungsfeld zwischen
o gesteigerter Immersion und User Experience [Nutzenkomponente 1]
o erzielbarer belastbarer Aussage [Nutzenkomponente 2] und
o Aufwand der Nutzung, wie z.B. Anschaffung, Preis, Anlegen, Kalibrierung,
Komforteinschränkung bei der Benutzung, Restriktion Arbeitsraum
[Aufwandkomponenten] behaupten müssen.
Konsumentenlösungen im VR-Haptik-Markt waren bislang preisgünstige Komponenten,
die die Nutzenkomponente 1 in den Vordergrund stellten
Industrielösungen im VR-Haptik-Markt waren bislang teure Komponenten, die die
Nutzenkomponente 2 in den Vordergrund stellten; hierunter fanden sich bislang wenige
Datenhandschuhe (Ausnahme: A.R.T. Fingertracking und weitere)
Der VR-HMD-Markt war bis vor 5 Jahren äquivalent aufgeteilt, mittlerweile ist ein
Überschwappen von Consumer-Lösungen mit gesteigerter Leistungsfähigkeit in
Industrieanwendungen zu sehen; selbst Game Engines werden mittlerweile industriell
verwendet Ein Szenario, bei dem dieses auch in der Haptik geschieht, ist denkbar
29Grundlagen Haptik-Systeme Anwendungsfelder Marktanalyse Zusammenfassung
Zusammenfassung
Zusammenfassung
Technische Komponenten Bauarten von Haptik- Anwendungsfelder
eines Haptik-Systems Systemen
• Tracking • Reine Eingabesysteme • Mensch-Computer
• Verarbeitung der Tracking- • Taktile Ausgabesysteme Interaktion
Daten • Erdbasierte Kraftausgabe- • Kraftdarstellung
• Kollisionsantwort Systeme • Unterstützung motorischer
• Haptische Ausgabe • Körperbasierte Körperfunktionen
Kraftausgabe-Systeme • Fernwirkung/ Telepräsenz
• Unbasierte Kraftausgabe- • Virtual Prototyping
Systeme haptischer
• Anthropometrische 3D- Produkteigenschaften
Menschmodelle • Training haptischer
Fähigkeiten und Fertigkeiten
• Spiele, Unterhaltung
30Quellen
IEEE Instrumentation and Measurement Magazine, “The Potential of Haptics Technologies”, 2007
H. Sjöberg, O.Ylinenpää, Umea University, „Collision Detection for Haptic Rendering“, 2009
C. Basdogan, M. A. Srinivasan, “Haptic Rendering in Virtual Environments”
K. Salibury, F. Conti (Stanford University), F. Barbagli (Stanford University and University of Siena), „Haptic Rendering: Introductory Concepts“,
2004
G.C. Burdea (Rutgers- The State University of New Jersey), Keynote Address: „Haptic Feedback for Virtual Reality“, 1999
M. Bouzit, G. Popescu, G. Burdea, and R. Boian. 2002: The Rutgers Master II-ND force feedback glove. In: Proceedings 10th Symposium on
Haptic Interfaces for Virtual Environment and Teleoperator Systems. HAPTICS 2002, 145–152
Huber-Straßer, Angeliga: Neue Dimensionen der Realität. Eine Analyse der Potenziale von Virtual und Augmented Reality für Unternehmen.
KPMG AG Wirtschaftsprüfungsgesellschaft, München, 2016, Seite 58: Haptik im Rahmen des VR-basierten Verkaufsprozesses
IDTechEx: Haptics 2018-2028: Technologies, Markets and Players, Boston, USA: 2018; online unter:
https://www.idtechex.com/research/reports/haptics-2018-2028-technologies-markets-and-players-000596.asp?viewopt=desc
Markets & Markets: Haptics Technology Market by Technology (Tactile & Force Feedback), by Components (Actuators, Drivers & Controllers,
Sensors, Software), Application (Consumer, Automotive, Medical), and Geography - Analysis and Forecast up to 2020, Pune, Indien: Mai, 2015;
online unter: https://www.businesswire.com/news/home/20150529005938/en/Research-Markets-Global-Haptics-Technology-Expected-Reach
Markets and Markets: Haptic Technology Market by Component (Actuators, Drivers & Controllers), Feedback (Tactile, Force), Application
(Automotive & Transportation, Consumer Electronics, Healthcare, Gaming, Engineering, Education & Research), and Region - Global Forecast
to 2022; Pune, Indien: Oktober 2016; online unter: https://www.marketsandmarkets.com/Market-Reports/haptic-technology-market-443.html
Research and Markets: Global Haptics Technology Market Analysis & Trends - Industry Forecast to 2025. Dublin/Irland: Dezember 2016; online
unter : https://www.researchandmarkets.com/research/zbpk5b/global_haptics
Stratistics MRC : Haptics Technology - Global Market Outlook (2016-2022), Secunderabad, Indien, Januar 2017; online unter:
https://www.strategymrc.com/report/haptics-technology-market-2016
TechNavio: Global Haptics Market 2017-2021. TechNavio, London/UK: Juli 2017; online unter: https://www.technavio.com/report/global-human-
machine-interface-global-haptics-market
31Mitglieder der Netzwerke VDC und Visual Sweden in
diesem Bereich:
32Vielen Dank für Ihr Interesse!
Das Thema interessiert Sie und Sie suchen nach Ansprechpartnern?
Sprechen Sie uns gerne an.
Virtual Dimension Center (VDC) Fellbach
Auberlenstraße 13
70736 Fellbach
www.vdc-fellbach.de
© Competence Centre for Virtual Reality and Cooperative Engineering w. V. – Virtual Dimension Center (VDC)Sie können auch lesen

















































