Neigungswinkelmessung durch Beschleunigungssensoren
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
HTWG Konstanz Home Lab - Prof. Dr. F. Lang
Neigungswinkelmessung durch
Beschleunigungssensoren
Laboranleitung
HTWG Konstanz
Prof. Dr. Florian Lang
1 Überblick
In aktuellen Smartphones und Tablets sind verschiedene Sensoren verbaut.
Üblich sind 3-Achsen Beschleunigungssensoren, 3-Achsen Drehratensenso-
ren, 3-Achsen Magnetsensoren, GPS, Umgebungslichtsensor, Mikrofon und
Kamera. In diesem Experiment werden einfache Versuche mit dem Beschleu-
nigungssensor durchgeführt.
In Versuchsteil A machen Sie sich mit der Funktionsweise des Beschleu-
nigungssensors vertraut.
In Versuchsteil B verwenden wir den Sensor, um die Neigung einer Un-
terlage zu messen.
2 Aufbau
Zur Durchführung des Versuchs benötigen Sie ein Smartphone oder Tablet,
eine ebene, neigbare Unterlage (Tischplatte, Brett, o.ä.) und einen Meter-
stab.
Zur Vorbereitung installieren Sie auf Ihrem Smartphone eine App, die
Zugriff auf die Sensordaten ermöglicht. Eine empfehlenswerte Option für
Androidgeräte ist AndroSensor. Es sind jedoch verschiedene vergleichbare
Apps verfügbar. Versuchen Sie über die App Informationen zum Sensor in
Ihrem Smartphone oder Tablet zu erhalten und dokumentieren Sie die In-
formationen in Ihrem Messprotokoll.
Hinweis: Bei aktuellen Betriebssystemen werden Daten zu Beschleuni-
gungssensor, Schwerkraft und Lineare Beschleunigung angezeigt. Die Werte
in der Kategorie Beschleunigungssensor zeigen die Ausgabewerte des Sen-
sors an. Die Werte in den Kategorien Schwerkraft und Lineare Beschleu-
nigung werden mit Hilfe dieser Signale algorithmisch berechnet. In diesem
Versuch werden nur die Signale des Beschleunigungssensors betrachtet. So-
fern möglich, deaktivieren Sie die Aufzeichnung der anderen Sensoren im
Menü Einstellungen.
Machen Sie sich damit vertraut, wie Sie die Messdaten mit der App als
.csv-Datei erfassen, speichern und mit einer Tabellenkalkulation auslesen
Unterlagen ausschließlich für Vorlesungszwecke an der HTWG Konstanz 1HTWG Konstanz Home Lab - Prof. Dr. F. Lang
können. Achten Sie insbesondere darauf, dass beim Einlesen der Datei das
Dezimaltrennzeichen und die Trennung der einzelnen Werte korrekt erkannt
werden. Bei Problemen kann es hilfreich sein, die .csv-Datei zunächst mit
einem Texteditor zu öffnen und alle Punkte durch Kommas zu ersetzen
(Anpassung der Dezimaltrennzeichen).
Im Aufbau zu Versuchsteil A wird das Smartphone oder Tablet zunächst
jeweils mit einer seiner Kanten parallel zur Gravitationsfeldstärke ausgerich-
tet. In jeder dieser Positionen werden die Messdaten des Beschleunigungs-
sensors erfasst. Die Ergebnisse werden mit dem Referenzwert für die Gravi-
tationsfeldstärke verglichen. Mit Hilfe der Ergebnisse werden systematische
Offsetabweichungen des Sensors korrigiert.
Im Aufbau zum Versuchsteil B wird die neigbare Unterlage mit geringer
Neigungen aufgebaut. Das Smartphone oder Tablet wird anschließend auf
der Unterlage platziert. Der Neigungswinkel wird mit Hilfe der Beschleuni-
gungssensordaten gemessen und mit dem geometrisch bestimmten Neigungs-
winkel verglichen.
3 Lernziele
Nach Abschluss dieses Versuchs
sind Sie mit der Funktionsweise von Beschleunigungssensoren vertraut.
können Sie mit Hilfe von Beschleunigungssensoren die Neigung einer
Unterlage bestimmen.
beherrschen Sie die Analyse und Darstellung von Messunsicherheiten
bei komplizierteren mathematischen Zusammenhängen.
wissen Sie, wie Sie durch Korrektureingangsgrößen und Kalibrierungen
systematische Abweichungen korrigieren.
4 Theoretische Grundlagen
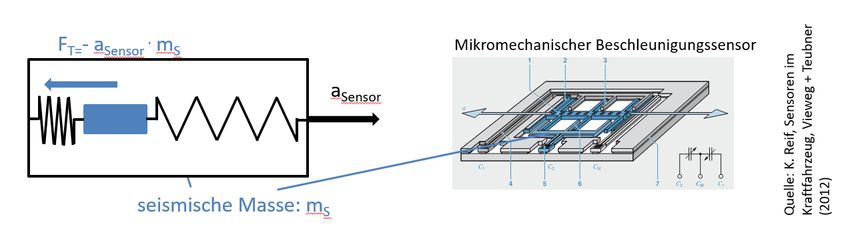
Beschleunigungssensoren messen die Kraft auf eine in ihrem Innern federnd
aufgehängte Masse (Fig. 1). Diese Masse wird als seismische Masse bezeich-
net. Bei einer Beschleunigung des Sensors wirken auf die seismische Masse
Trägheitskräfte, die detektiert werden. Auf die seismische Masse wirkt aller-
dings auch die Gravitationskraft (Fig. 2).
Der Sensor kann nicht unterscheiden, ob die seismische Masse aufgrund
von Trägheitskräften oder aufgrund der Gravitation ausgelenkt wird. Der
Sensor misst eine Überlagerung der Beschleunigung und der negativen Gra-
vitationsfeldstärke
~aSensor = ~a − ~g .
Unterlagen ausschließlich für Vorlesungszwecke an der HTWG Konstanz 2HTWG Konstanz Home Lab - Prof. Dr. F. Lang
Abbildung 1: Funktionsprinzip eines Beschleunigungssensors (1-Achse). Schemati-
sche Darstellung und technische Umsetzung.
Abbildung 2: Einfluss der Gravitationskraft auf das Beschleunigungssensorsignal.
Bitte erarbeiten Sie sich eigenständig einen Überblick anhand der fol-
genden Quellen:
K. Reif: Sensoren im Kraftfahrzeug, S. 67 ff, Springer Vieweg, 2016
E. Hering, G. Schönfelder: Sensoren in Wissenschaft und Technik, S. 371
ff, Springer Vieweg, 2018.
5 Versuchsdurchführung
5.1 Vorbereitung
Öffnen Sie Ihre App zur Sensordatenerfassung. Versuchen Sie über die App
Informationen zum Hersteller und den technischen Eigenschaften des ver-
bauten Beschleunigungssensors zu recherchieren.
Unterlagen ausschließlich für Vorlesungszwecke an der HTWG Konstanz 3HTWG Konstanz Home Lab - Prof. Dr. F. Lang
Aktivieren Sie die Erfassung und grafische Darstellung der Beschleuni-
gungssensorsignale in Ihrer App. Bewegen Sie Ihr Smartphone bzw. Tablet
entlang der folgenden 3 Achsen: senkrecht zum Display, Längsachse, Quer-
achse. Dokumentieren Sie in Ihrem Messprotokoll anhand einer Skizze oder
eines Fotos, wie die x-, y- und z-Achse des Beschleunigungssensors in Ihrem
Smartphone oder Tablet ausgerichtet sind. Beachten Sie bei Ihrer Dokumen-
tation auch das korrekte Vorzeichen der Signale! Prüfen Sie, ob die Achsen
ein Rechtssystem bilden.
5.2 Versuchsteil A: Offset-Kalibrierung
Stellen Sie in den Optionen ein Aufnahme Intervall von ca. 1 s ein. Starten
Sie die Aufzeichnung der Daten als .csv-Datei.
Legen Sie das Smartphone oder Tablet mit der Rückseite für ca. 20 s
auf eine horizonal ausgerichtete Unterlage. Stellen Sie das Smartphone oder
Tablet für jeweils ca. 20 s senkrecht an einer Wand auf. Stellen Sie das Smart-
phone dabei einmal auf die kurze und einmal auf die längere Seite. Bewegen
Sie das Smartphone oder Tablet nicht, während die Daten in den drei Posi-
tionen aufgezeichnet werden. Stoppen Sie die Aufzeichnung der Daten.
Entnehmen Sie aus dem Datenfile für alle drei Positionen eine Messreihe
mit jeweils 10 Werten in Ihr Versuchsprotokoll. Bestimmen Sie aus den Mess-
reihen ohne Berücksichtigung von systematischen Unsicherheiten durch den
Sensor jeweils denq Bestwert und die Unsicherheit für ax,raw , ay,raw , az,raw
und agesamt,raw = a2x + a2y + a2z .
Vergleichen Sie das Ergebnis mit dem Referenzwert der Gravitations-
feldstärke g = 9, 81 m
s2 und diskutieren Sie das Ergebnis.
Zur Berücksichtigung von Typ B Unsicherheiten des Sensors sollen die
Messdaten für die z-Achse durch einen Summanden co,z korrigiert werden:
az = az,raw + co,z .
Bestimmen Sie den Korrektursummanden co,z , indem Sie den vorrange-
gangenen Versuchsteil mit dem Handy 20 s liegend auf der Rückseite und
Handy 20 s liegend auf dem Display wiederholen. Entnehmen Sie dem Da-
tensatz wieder für beide Positionen geeignete Messreihen für Ihr Messpro-
tokoll. Bestimmen Sie daraus Bestwerte und Unsicherheiten für az,raw,up
und az,raw,down . Die Offsetkorrektur co,z soll nun so berechnet werden,
dass der Mittelwert der beiden korrigierten Werte Null ergibt.
az,raw,up + az,raw,down
co,z = − .
2
Berechnen Sie den Bestwert und die Unsicherheit für co,z . Verfahren Sie
für die x- und y-Achse analog.
Unterlagen ausschließlich für Vorlesungszwecke an der HTWG Konstanz 4HTWG Konstanz Home Lab - Prof. Dr. F. Lang
5.3 Versuchsteil B: Neigungsmessung
Bauen Sie Ihre Unterlage mit einer geringen Neigung auf, die so gewählt
ist, dass das Smartphone bzw. Tablet auf der Unterlage liegen bleibt und
nicht hinunter rutscht. Messen Sie mit Hilfe des Meterstabs die Länge l Ihrer
Unterlage und die Höhe h der Steigung. Messen Sie beide Werte jeweils 5
mal und bestimmen Sie den Bestwert und die Unsicherheit. Berechnen Sie
mit Hilfe der Beziehung sin α = h/l den Neigungswinkel.
Legen Sie Ihr Smartphone bzw. Tablet mit der Rückseite auf die geneigte
Unterlage, so dass die Längsseite des Displays nach unten zeigt. Nehmen Sie
eine Messreihe der Beschleunigungssensordaten auf und berechnen Sie den
Bestwert und die Unsicherheit der Beschleunigungswerte für alle Achsen
unter Berücksichtigung der Korrektur aus Teil A.
Bestimmen aus dem Beschleunigungswert senkrecht zur Unterlage bzw.
zum Display den Steigungswinkel mit Hilfe der Formel
asenk.
α = arccos .
ages.
Bestimmen aus dem Beschleunigungswert in Richtung der Neigung den
Steigungswinkel mit Hilfe der Formel
aneig.
α = arcsin .
ages.
6 Auswertung
6.1 Versuchsteil A
Erläutern Sie das für die Offsetkorrektur verwendete Verfahren. Prüfen Sie
die im Messprotokoll in der Tabellenkalkulation hinterlegten Formeln zur
Berechnung der Unsicherheiten. Leiten Sie die Formel für die Unsicherheits-
berechnung der Korrektursummanden co,x , co,y und co,z her. Kann die
Abweichung vom Referenzwert für g allein anhand der Offsetkorrektur er-
klärt werden? Schlagen Sie eine weitere Korrektur zur Verbesserung der
Messungen vor.
6.2 Versuchsteil B
Berechnen Sie aus den Messungen mit dem Meterstab den Neigungswin-
kel und die Unsicherheit des Neigungswinkels. Diskutieren Sie, ob zwischen
den kombinierten Unsicherheiten für die Messung von l und die Messung
von h ein Zusammenhang besteht, i.e. ob die Unsicherheiten korreliert sind.
Berechnen Sie die kombinierten Unsicherheiten der korrigierten Bestwer-
te mit der Offsetkorrektur aus Teil A. Bestimmen Sie den Neigungswinkel
aus den korrigierten Beschleunigungswerten mit Hilfe der arcsin- und der
Unterlagen ausschließlich für Vorlesungszwecke an der HTWG Konstanz 5HTWG Konstanz Home Lab - Prof. Dr. F. Lang
arccos-Funktion. Berechnen Sie jeweils die Unsicherheit des Neigungswin-
kels. Vergleichen Sie die Werte mit einer Berechnung der Winkel ohne Off-
setkorrektur.
Diskutieren Sie, ob die Berechnung anhand der arcsin-Funktion oder der
arccos-Funktion vorzuziehen ist.
7 Organisatorischer Ablauf
Der Laborversuch wird von alle Laborteilnehmerinnen und -teilnehmern ein-
zeln zu Hause durchgeführt. Alle Laborteilnehmerinnen und -teilnehmer er-
stellen zu Ihrem Versuch ein ausführliches Messprotokoll mit Namensangabe,
Datum, Dokumentation der Aufbauten mit Fotos / Skizzen und tabellari-
scher Erfassung aller Messreihen. Die Messprotokolle können handschriftlich
oder mit Hilfe einer Tabellenkalkulation (vgl. Template) erstellt werden.
Die Durchführung des Versuchs muss mit Hilfe des Protokolls im Detail
nachvollziehbar sein. Das Protokoll wird am Versuchstag von den Labor-
teilnehmerinnen und -teilnehmern unterschrieben. Eine digitale Version des
Messprotokolls wird über eine Moodle-Datenbank abgegeben.
Die Auswertung erfolgt per Onlinekonferenz gemeinsam im Laborteam.
Nach einer ersten Auswertung hat das Laborteam die Möglichkeit, Fragen
in einem individuellen Onlinecoaching zu klären. Die abschließende Doku-
mentation erfolgt als Onlinepräsentation.
Unterlagen ausschließlich für Vorlesungszwecke an der HTWG Konstanz 6Sie können auch lesen

















































