Produktspezifikation IRB 390
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
ROBOTICS Produktspezifikation IRB 390
Trace back information: Workspace 21B version a5 Checked in 2021-05-27 Skribenta version 5.4.005
Produktspezifikation
IRB 390 - 15/1300
IRB 390 - 10/1300
IRC5
Dokumentnr: 3HAC066568-003
Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.
Spezifikationen können ohne vorherige Ankündigung geändert werden.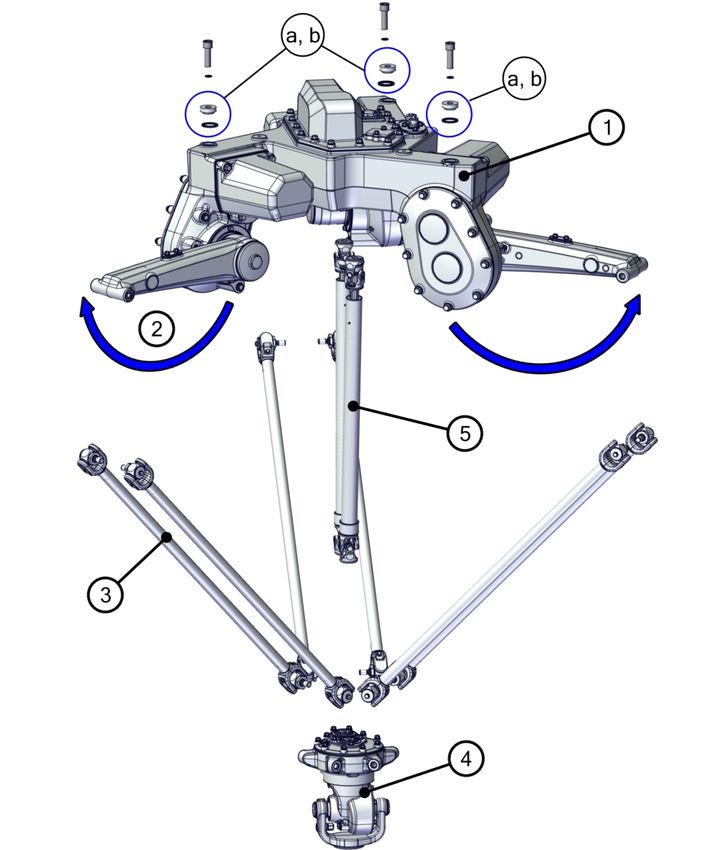
Die Informationen in diesem Handbuch können ohne vorherige Ankündigung geändert
werden und stellen keine Verpflichtung von ABB dar. ABB übernimmt keinerlei
Verantwortung für etwaige Fehler, die dieses Handbuch enthalten kann.
Wenn nicht ausdrücklich in vorliegendem Handbuch angegeben, gibt ABB für keine
hierin enthaltenen Informationen Sachmängelhaftung oder Gewährleistung für
Verluste, Personen- oder Sachschäden, Verwendbarkeit für einen bestimmten Zweck
oder Ähnliches.
In keinem Fall kann ABB haftbar gemacht werden für Schäden oder Folgeschäden,
die sich aus der Anwendung dieses Dokuments oder der darin beschriebenen
Produkte ergeben.
Dieses Handbuch darf weder ganz noch teilweise ohne vorherige schriftliche
Genehmigung von ABB vervielfältigt oder kopiert werden.
Zur späteren Verwendung aufbewahren.
Zusätzliche Kopien dieses Handbuchs können von ABB bezogen werden.
Übersetzung der Originalbetriebsanleitung.
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.
Spezifikationen können ohne vorherige Ankündigung geändert werden.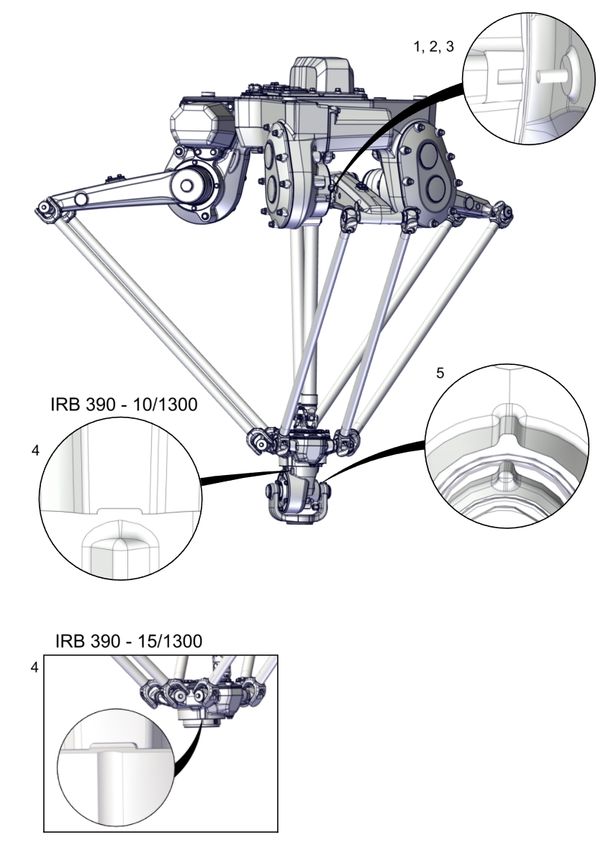
Inhaltsverzeichnis
Inhaltsverzeichnis
Überblick über dieses Handbuch ..................................................................................................... 7
1 Beschreibung 9
1.1 Struktur ........................................................................................................... 9
1.1.1 Einführung in die Struktur ......................................................................... 9
1.1.2 Verschiedene Roboterversionen ................................................................ 11
1.1.3 Definition der Versionsbezeichnung ............................................................ 12
1.1.3.1 Technische Daten ........................................................................ 12
1.2 Sicherheitsnormen ............................................................................................ 16
1.2.1 Geltende Normen .................................................................................... 16
1.3 Installation ....................................................................................................... 18
1.3.1 Einführung in die Installation ..................................................................... 18
1.3.2 Umgebungsbedingungen .......................................................................... 19
1.3.3 Montage des Manipulators ........................................................................ 20
1.3.4 Art der Schmierung in Getrieben ............................................................... 24
1.4 Kalibrierung und Referenzpunkte ......................................................................... 26
1.4.1 Kalibriermethoden ................................................................................... 26
1.4.2 Feinkalibrierung ...................................................................................... 27
1.4.3 Synchronisierungsmarkierungen und Richtungen der Achsenbewegung ........... 28
1.4.3.1 Synchronisierungsmarkierungen und Synchronisierungsposition für
Achsen ...................................................................................... 28
1.4.3.2 Richtungen der Kalibrierbewegungen .............................................. 29
1.5 Lastdiagramme ................................................................................................. 30
1.5.1 Einleitung .............................................................................................. 30
1.5.2 Lastdiagramme ....................................................................................... 31
1.5.3 Maximale TCP Beschleunigung ................................................................. 34
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen) ................................ 35
1.7 Wartung und Fehlerbehebung ............................................................................. 42
1.8 Roboterbewegung ............................................................................................. 43
1.8.1 Arbeitsbereich ....................................................................................... 43
1.8.2 Leistung gemäß ISO 9283 ......................................................................... 45
1.9 Typische Zykluszeiten ........................................................................................ 47
1.9.1 Einführung in typische Zykluszeiten ............................................................ 47
2 Spezifikation der Varianten und Optionen 49
2.1 Einführung in Varianten und Optionen ................................................................... 49
2.2 Manipulator ...................................................................................................... 50
2.3 Bodenkabel ...................................................................................................... 53
2.4 Prozess ........................................................................................................... 54
3 Zubehör 55
3.1 Einführung in Zubehör ....................................................................................... 55
Index 57
Produktspezifikation - IRB 390 5
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.
Diese Seite wurde absichtlich leer gelassen
Überblick über dieses Handbuch
Überblick über dieses Handbuch
Über dieses Handbuch
Dieses Handbuch enthält Anweisungen für:
• mechanische und elektrische Installation des Roboters,
• Wartung des Roboters,
• mechanische und elektrische Reparatur des Roboters.
Verwendung
Verwenden Sie dieses Handbuch bei:
• Installation, vom Transport des Roboters an seinen Aufstellungsort und
seiner Befestigung am Fundament bis zu den Vorbereitungen für die
Inbetriebnahme,
• Wartungsarbeiten und
• Reparaturarbeiten und Kalibrierung.
Wer sollte dieses Handbuch lesen?
Dieses Handbuch ist vorgesehen für:
• Installationspersonal,
• Wartungspersonal,
• Reparaturpersonal.
Voraussetzungen
Ein Wartungs-/Reparatur-/Installationstechniker, der an einem ABB-Roboter arbeitet,
muss:
• von ABB geschult sein und die erforderlichen Kenntnisse über mechanische
und elektrische Installations-/Reparatur-/Wartungsarbeiten besitzen.
Referenzen
Die Dokumentation, auf die in diesem Handbuch verwiesen wird, ist in der Tabelle
unten aufgeführt.
Dokumentname Dokumentnummer
Produkthandbuch, Ersatzteile - IRB 390 3HAC066567-003
Produkthandbuch - IRB 390 3HAC066566-003
Produkthandbuch - IRC5 3HAC021313-003
Technisches Referenzhandbuch - Systemparameter 3HAC050948-003
Technisches Referenzhandbuch - Schmierung von Getrieben 3HAC042927-003
Circuit diagram - IRB 390 3HAC060545-009
Material/product safety data sheet - Battery pack 3HAC043118-001
Revisionen
Revision Beschreibung
A Erste Ausgabe
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 7
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.Überblick über dieses Handbuch
Fortsetzung
Revision Beschreibung
B Veröffentlicht in Ausgabe 21A. Die folgenden Aktualisierungen wurden
in dieser Version vorgenommen:
• Geringfügige Änderungen.
C Veröffentlicht in Ausgabe 21B. Die folgenden Überholungen wurden in
dieser Aktualisierung vorgenommen:
• Text zur Güte der Befestigung geändert.
• Allgemeine Beschreibung im Abschnitt Lastdiagramme aktualisiert.
8 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.1.1 Einführung in die Struktur
1 Beschreibung
1.1 Struktur
1.1.1 Einführung in die Struktur
Roboterfamilie
Der neue IRB 390 FlexPacker™ unterstützt Logistik- und
E-Commerce-Fulfillment-Zentren bei der kundenindividuellen Verpackung und
Kommissionierung. Der Deltaroboter erleichtert zudem die bedarfsorientierte
Hochgeschwindigkeits- und Hochvariantensortierung ebenso wie die vertikale
Verpackung.
Der IRB 390 FlexPacker-Roboter wird als vier- und fünfachsiger Deltaroboter
erhältlich sein. Dabei ist er 35 Prozent schneller als der IRB 360-8/1130 FlexPicker
und das erreichte Volumen ist um 45 höher. Die Traglast erreicht 15 kg.
Der IRB 390 wurde für Kunden in der Lebensmittel- und Getränke-, Logistik-,
Pharma- und Konsumgüterindustrie entwickelt und eignet sich ideal für
Sekundärverpackungen sowie Anwendungen mit höherer Nutzlast. Er verfügt über
die erforderliche Geschwindigkeit und Flexibilität, um sowohl Shelf Ready Packaging
(SRP) als auch Retail Ready Packaging (RRP) zu unterstützen.
Betriebssystem
Der Roboter ist mit einer IRC5-Steuerung und der Robotersteuerungssoftware
RobotWare ausgestattet. RobotWare unterstützt sämtliche Aspekte des
Robotersystems, wie beispielsweise die Bewegungssteuerung, die Entwicklung
und Abarbeitung von Anwendungsprogrammen, den Datenaustausch usw., siehe
Produktspezifikation - Steuerung IRC5 mit FlexPendant.
Sicherheit
Die Sicherheitsnormen gelten für den gesamten Roboter, den Manipulator und die
Steuerung.
Zusätzliche Funktionalität
Für zusätzliche Funktionalität kann der Roboter mit optionaler Software zur
Anwendungsunterstützung ausgerüstet werden. Hierzu gehören beispielsweise
Kommunikationsfunktionen, Netzwerkkommunikation und erweiterte Funktionen
wie z. B. Multi-Tasking, Sensorüberwachung usw. Eine umfassende Beschreibung
der optionalen Software entnehmen Sie Produktspezifikation - Steuerungssoftware
IRC5.
PickMaster ® ist eine spezielle Anwendungssoftware für sichtgesteuertes
Aufnehmen. Sie bietet aufgabenorientierte Programmierung und die Abarbeitung
von schnellen Aufnahme- und Platzierungsanwendungen, siehe
Produktspezifikation - PickMaster Twin.
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 9
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.1.1 Einführung in die Struktur
Fortsetzung
Hygiene-Konformität
Alle freiliegenden Flächen erfüllen die FDA-Vorschriften zum gelegentlichen Kontakt
mit Lebensmitteln. Die Getriebe sind mit lebensmittelverträglichem Öl der Klasse
NSF-H1 geschmiert (H1 -Schmierstoffe sind Schmierstoffe in Lebensmittelqualität,
die in der Lebensmittelverarbeitung dort eingesetzt werden wo die Möglichkeit des
Kontakts mit Lebensmitteln besteht). Alle Schmierstoffe hinter freiliegenden
Dichtungen entsprechen, ebenso wie die empfohlenen Gebrauchsfette, NSF-H1.
Roboterachsen
xx2000000006
Pos. Beschreibung Pos. Beschreibung
1 Achse 1 2 Achse 2
3 Achse 3 4 Achse 4
5 Achse 5
10 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.1.2 Verschiedene Roboterversionen
1.1.2 Verschiedene Roboterversionen
Allgemeines
Der IRB 390 ist in zwei verschiedenen Versionen erhältlich.
Robotertypen
Folgende Standard-Robotertypen sind erhältlich:
Robotertyp Handhabungskapazität (kg)
IRB 390-15/1300 15 kg
IRB 390-10/1300 10 kg
Produktspezifikation - IRB 390 11
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.1.3.1 Technische Daten
1.1.3 Definition der Versionsbezeichnung
1.1.3.1 Technische Daten
Gewicht, Roboter
Die Tabelle gibt das Gewicht des Roboters an.
Robotermodell Gewicht
IRB 390 IRB 390 - 15/1300: 133 kg
IRB 390 - 10/1300: 148 kg
Hinweis
Das Gewicht wird für den Roboter ohne Werkzeuge und andere am Roboter
montierte Werkzeuge angegeben.
Belastung des Fundaments, Roboter
xx2000000862
Die Tabelle gibt die unterschiedlichen Kräfte und Drehmomente an, denen der
Roboter bei unterschiedlichen Arbeiten ausgesetzt ist.
Hinweis
Diese Kräfte und Drehmomente sind Extremwerte, die während des Betriebs
selten erreicht werden. Außerdem werden die Maximalwerte niemals gleichzeitig
erreicht!
Fortsetzung auf nächster Seite
12 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.1.3.1 Technische Daten
Fortsetzung
WARNUNG
Die Installation des Roboters darf nur gemäß den Angaben bezüglich
Montageoptionen in der bzw. den folgenden Lasttabellen erfolgen:
Abgehängt im Roboterrahmen
Kraft Dauerbelastung (Betrieb) Maximale Last (Nothalt)
Kraft xy ±1,8 kN ±4,0 kN
Kraft z 1,4 ± 0,6 kN 1,4 ± 1,9 kN
Drehmoment 2,0 kNm 4,3 kNm
xy
Drehmoment 0,6 kNm 1,2 kNm
z
Anforderungen, Fundament
Die Tabelle enthält die Anforderungen an das Fundament, wobei das Gewicht des
installierten Roboters enthalten ist:
Anforderung Wert Hinweis
Ebenheit des Funda- 0,3 mm Ebene Flächen ermöglichen eine bessere Wie-
ments derholbarkeit der Resolverkalibrierung im Ver-
gleich zu den Originaleinstellungen bei Lieferung
von ABB.
Die Ebenheitswerte beziehen sich auf die Veran-
kerungspunkte des Robotersockels.
Maximale Neigung 0°
Minimale Resonanzfre- 35 Hz Für eine optimale Leistung ist der empfohlene
quenz Wert einzuhalten.
Hinweis Die Steifigkeit des Sockels muss der Roboter-
masse einschließlich Ausrüstung entsprechen. i
Wenn eine niedri- Informationen zur Kompensation der Fundament-
gere als die emp- flexibilität, siehe Anwendungshandbuch - Steue-
fohlene Reso- rungssoftware IRC5, Abschnitt Bewegungspro-
nanzfrequenz zess-Modus.
verwendet wird,
kann sich dies
auf die Lebens-
dauer des Mani-
pulators auswir-
ken.
i Die angegebene minimale Resonanzfrequenz ist als Frequenz der Masse und des Trägheitsmoments
des Roboters zu verstehen. Dabei ist der Roboter als steif angenommen und eine
Translations-/Torsionselastizität des Fundaments hinzu addiert, d. h., die Steifigkeit des Sockels,
auf dem der Roboter montiert ist. Die minimale Resonanzfrequenz ist nicht als Resonanzfrequenz
von Gebäude, Boden usw. zu verstehen. Beispielsweise beeinflusst eine sehr große äquivalente
Masse des Bodens die Roboterbewegung nicht – selbst dann nicht, wenn ihre Frequenz deutlich
unter dem angegebenen Wert liegt. Der Roboter sollte so fest wie möglich am Boden montiert sein.
Störungen durch andere Maschinen beeinflussen die Roboter- und Werkzeuggenauigkeit. Die
Resonanzfrequenz des Roboters liegt bei 10–20 Hz. Störungen in diesem Bereich werden verstärkt,
auch wenn eine leichte Dämpfung durch die Servosteuerung stattfindet. Dies kann je nach den
Anwendungsanforderungen ein Problem darstellen. In diesem Fall muss der Roboter von der
Umgebung isoliert werden.
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 13
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.1.3.1 Technische Daten
Fortsetzung
Lagerbedingungen, Roboter
Die Tabelle gibt die zulässigen Lagerbedingungen für den Roboter an:
Parameter Wert
Min. Umgebungstemperatur -25°C
Max. Umgebungstemperatur 55°C
Max. Umgebungstemperatur (weniger als 24 h) 70°C
Max. Luftfeuchtigkeit 95%
Betriebsbedingungen, Roboter
Die Tabelle gibt die zulässigen Betriebsbedingungen für den Roboter an:
Parameter Wert
Min. Umgebungstemperatur 0°C i
Max. Umgebungstemperatur +50°C
Max. Luftfeuchtigkeit 95% bei konstanter Temperatur
i Bei einer niedrigen Umgebungstemperatur von < 10 °C wird, wie bei jeder anderen Maschine auch,
für den Roboter eine Warmlaufphase empfohlen. Andernfalls besteht die Gefahr, dass der Roboter
aufgrund der temperaturbedingten Viskosität von Öl und Schmierfett stehen bleibt oder mit
geringerer Leistung läuft.
Schutzklassen, Roboter
Die Tabelle gibt die erhältlichen Schutzarten des Roboters mit den entsprechenden
Schutzklassen an.
Schutzart Schutzklasse
Manipulator, Schutzart Standard IP67
Sonstige technische Daten
Daten Beschreibung Hinweis
Schalldruckpegel Schalldruckpegel außer- < 68 dB (A) Leq (gemäß Maschinen-
halb des Arbeitsraums richtlinie 2006/42/EG)
Leistungsaufnahme bei Nennlast
Art der Bewegung IRB 390 - 15/1300 IRB 390 - 10/1300
ISO-Würfel 1,25 1,28
Durchschnittliche Leistungsaufnahme (kW)
E1 E2
E4 E3
A
xx1000000101
14 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.1.3.1 Technische Daten
Fortsetzung
Pos. Beschreibung
A 320 mm
Produktspezifikation - IRB 390 15
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.2.1 Geltende Normen
1.2 Sicherheitsnormen
1.2.1 Geltende Normen
Hinweis
Die aufgeführten Normen gelten zum Zeitpunkt der Veröffentlichung dieses
Dokuments. Normen, die ungültig geworden sind oder ersetzt wurden, werden
bei Bedarf aus der Liste entfernt.
Allgemeines
Dieses Erzeugnis erfüllt die Anforderungen der ISO 10218-1:2011, Robots for
industrial environments - Safety requirements -Part 1 Robots, und den anwendbaren
Teilen der normativen Referenz, mit Gültigkeit ab ISO 10218-1:2011. Eventuelle
Abweichungen von ISO 10218-1 2011 sind in der Einbauerklärung enthalten, die
der Lieferung des Erzeugnisses beiliegt.
Normen gemäß ISO 10218-1
Norm Beschreibung
ISO 9283:1998 Manipulating industrial robots - Performance criteria and related
test methods
ISO 10218-2 Robots and robotic devices - Safety requirements for industrial
robots - Part 2: Robot systems and integration
ISO 12100 Safety of machinery - General principles for design - Risk as-
sessment and risk reduction
ISO 13849-1:2006 Safety of machinery - Safety related parts of control systems
- Part 1: General principles for design
ISO 13850 Safety of machinery - Emergency stop - Principles for design
IEC 60204-1:2005 Safety of machinery - Electrical equipment of machines - Part
1: General requirements
IEC 62061:2005 Safety of machinery - Functional safety of safety-related elec-
trical, electronic and programmable electronic control systems
Regionale Normen und Vorschriften
Norm Beschreibung
ANSI/RIA R15.06 Safety requirements for industrial robots and robot systems
ANSI/UL 1740 Safety standard for robots and robotic equipment
CAN/CSA Z 434-14 Industrial robots and robot Systems - General safety require-
ments
Andere für die Konstruktion angewendete Normen
Norm Beschreibung
ISO 9787:2013 Robots and robotic devices -- Coordinate systems and motion
nomenclatures
Fortsetzung auf nächster Seite
16 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.2.1 Geltende Normen
Fortsetzung
Norm Beschreibung
IEC 61000-6-2 Electromagnetic compatibility (EMC) – Part 6-2: Generic stan-
dards – Immunity standard for industrial environments
IEC 61000-6-4 Electromagnetic compatibility (EMC) – Part 6-4: Generic stan-
(Option 129-1) dards – Emission standard for industrial environments
ISO 13732-1:2008 Ergonomics of the thermal environment - Part 1
IEC 60974-1:2012 i Arc welding equipment - Part 1: Welding power sources
IEC 60974-10:2014 i Arc welding equipment - Part 10: EMC requirements
ISO 14644-1:2015 ii Classification of air cleanliness
IEC 60529:1989 + A2:2013 Degrees of protection provided by enclosures (IP code)
i Gilt nur für Roboter zum Lichtbogenschweißen. Ersetzt IEC 61000-6-4 für Roboter zum
Lichtbogenschweißen.
ii Nur Roboter mit Schutzart Clean Room.
Produktspezifikation - IRB 390 17
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.3.1 Einführung in die Installation
1.3 Installation
1.3.1 Einführung in die Installation
Allgemeines
Der IRB 390 ist an eine normale Industrieumgebung angepasst. Je nach
Roboterversion können Sie einen Endeffektor mit einem Maximalgewicht
einschließlich Nutzlast an den Werkzeugflansch (Achse 6) montieren. Siehe
Lastdiagramme auf Seite 30.
Zusätzliche Lasten
Der obere Arm kann eine Zusatzlast von 0,5 kg handhaben.
Begrenzung des Arbeitsbereichs
Der Arbeitsbereich kann nur mit der Software begrenzt werden, nicht mechanisch.
Der Kunden kann bei Bedarf einen kartesischen Arbeitsbereich begrenzen.
18 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.3.2 Umgebungsbedingungen
1.3.2 Umgebungsbedingungen
Schutzart
Robotervariante Schutzart IEC529
Alle Varianten, Manipulator IP67
Explosionsgefährdete Räume
Der Roboter darf nicht in Bereichen aufgestellt oder betrieben werden, in denen
Explosionsgefahr besteht.
Begrenzungen des Arbeitsbereichs
EPS kann nicht ausgewählt werden. Keine mechanische Begrenzung.
Umgebungstemperatur
Beschreibung Schutzklasse Temperatur
Manipulator mit Schmier- Norm + 5 °C i bis + 50 °C
stoffen in Lebensmittelqua-
lität während des Betriebs
i Bei einer niedrigen Umgebungstemperatur von < 10 °C wird, wie bei jeder anderen Maschine auch,
für den Roboter eine Warmlaufphase empfohlen. Andernfalls besteht die Gefahr, dass der Roboter
aufgrund der temperaturbedingten Viskosität von Öl und Schmierfett stehen bleibt oder mit
geringerer Leistung läuft.
Relative Luftfeuchtigkeit
Beschreibung Relative Luftfeuchtigkeit
Vollständiger Roboter im Betrieb, bei Transport und Max. 95 % bei konstanter Tempe-
Lagerung ratur
Produktspezifikation - IRB 390 19
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.3.3 Montage des Manipulators
1.3.3 Montage des Manipulators
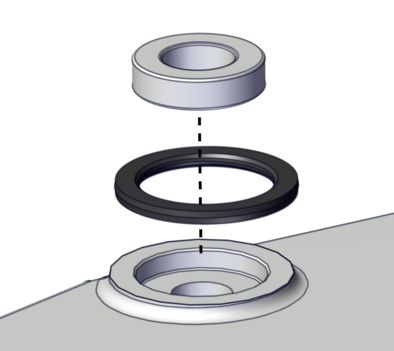
Montage-Abbildung
xx2000000683
Montagereihenfolge
1 Installieren Sie die Basiseinheit.
Hinweis
Die Unterlegscheibe (a) und die Dichtung (b) sind bei Lieferung separat
verpackt.
2 Bringen Sie die Oberarme in die Synchronisierstellung.
3 Befestigen Sie die Unterarme an den Oberarmen.
4 Befestigen Sie die Deltaeinheit an den Unterarmen.
Fortsetzung auf nächster Seite
20 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.3.3 Montage des Manipulators
Fortsetzung
Montagereihenfolge
5 Befestigen Sie die Teleskopeinheit.
6 Kalibrieren Sie den Roboter.
Hinweis zu Mxy und Fxy
Das Biegemoment (M xy) kann in jeder Richtung auf der xy-Ebene des
Basis-Koordinatensystems auftreten. Dasselbe gilt für die Querkraft (F xy).
Befestigungsbohrungen, Robotersockel
Draufsicht.
1017 1626 24,5°
740
460 B
B
3x 120°
C
C
D
91
°
3x
120
°
xx2000002050
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 21
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.3.3 Montage des Manipulators
Fortsetzung
Bohrplan, Sockel
Diese Abbildung zeigt den Bohrplan zum Befestigen des Roboters.
2 A B
G
60°
G2
0.1 F G
0.1 F G
0.08 J-K
0.08 J-K
3
X
740
3x 120°
X
G3
60
°
65.
5°
24.5°
CL J-K
Z=0
+0.021
3x 30 H7 0
3x 5 0.1
G1 0.1 F G
3x M16 40
0.08 J-K
1
X-X
xx2000000018
1 Getriebe Achse 1
2 Getriebe Achse 2
3 Getriebe Achse 3
A Befestigungsöffnungen für Hubösen
B Roboter-Befestigungsöffnungen
G1, G2, Referenzebene für jedes Getriebe.
G3
Die drei Auflagepunkte des Manipulatorsockels müssen jeweils auf einer Fläche
montiert werden, deren Ebenheit innerhalb vorgegebener Toleranzen liegen muss.
Verwenden Sie gegebenenfalls Ausgleichkeile.
Siehe Spezifikation in Anforderungen, Fundament auf Seite 13.
Fortsetzung auf nächster Seite
22 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.3.3 Montage des Manipulators
Fortsetzung
Befestigungsschrauben
Die folgende Tabelle gibt die Befestigungsschrauben und Unterlegscheiben zum
Befestigen des Roboters am Sockelfundament an.
Passende Schrauben M16 rostfreier Stahl. Mindestlänge Ein-
schraubtiefe: 24 mm
Anzahl 3 St.
Klasse Minimum quality: A4-80
Passende Unterlegscheiben 17x15x3 rostfreier Stahl (3HAC060866-005)
Abstand Distanzscheibe: 3HAC070543-001.
Dichtring: 3HAC074660-001.
xx2000000260
Eingeschlossen in der Manipulatorliefe-
rung.
Bei Beschädigung austauschen.
Anzugsdrehmoment 250 Nm
Anforderungen an ebenen Untergrund 0,3 mm
Produktspezifikation - IRB 390 23
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.3.4 Art der Schmierung in Getrieben
1.3.4 Art der Schmierung in Getrieben
Einleitung
Dieser Abschnitt beschreibt, wo Informationen über den Öltyp, die Artikelnummer
und die Ölmenge im speziellen Getriebe zu finden sind. Des Weiteren wird die für
die Schmierung benötigte Ausrüstung erklärt.
Öltyp und -menge in den Getrieben
Informationen zur Art der Schmierung, zur Artikelnummer sowie zur Menge im
jeweiligen Getriebe finden Sie unter Technisches Referenzhandbuch - Schmierung
von Getrieben, verfügbar für registrierte Benutzer im myABB Business Portal,
www.myportal.abb.com.
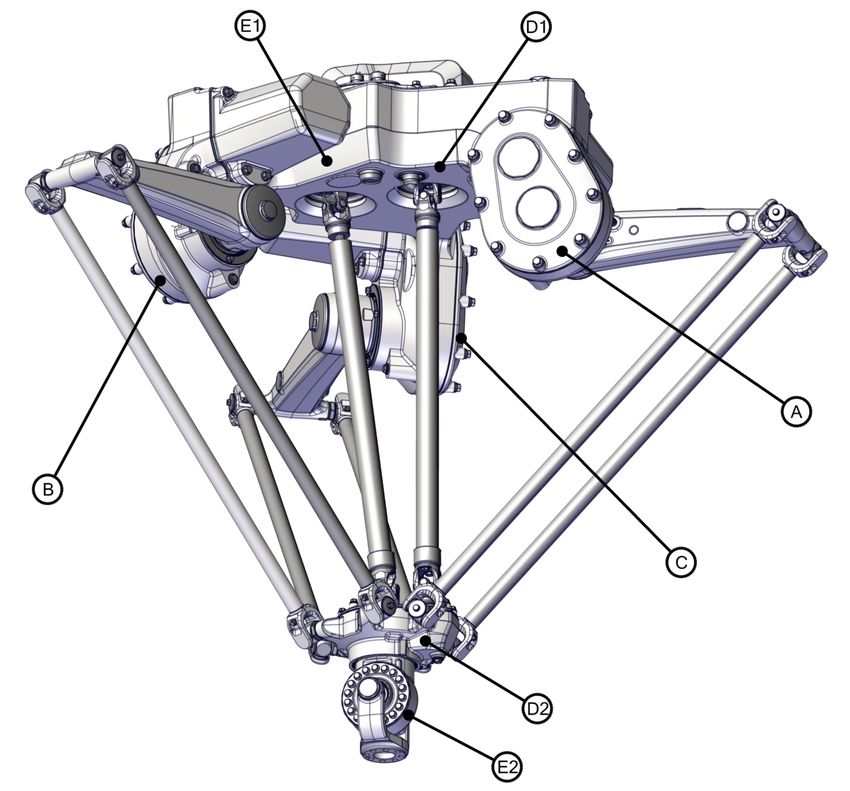
Sitz der Getriebe
Die Abbildung zeigt die Positionen der Getriebe.
xx1900000303
A Getriebe Achse-1
B Getriebe Achse-2
C Getriebe Achse-3
D1 Getriebe-Vorstufe Achse -4
Fortsetzung auf nächster Seite
24 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.3.4 Art der Schmierung in Getrieben
Fortsetzung
D2 Getriebe Achse-4
E1 Getriebe-Vorstufe Achse -5
E2 Getriebe Achse-5
Produktspezifikation - IRB 390 25
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.4.1 Kalibriermethoden
1.4 Kalibrierung und Referenzpunkte
1.4.1 Kalibriermethoden
Überblick
Dieser Abschnitt beschreibt die verschiedenen Kalibrierungsarten und die von
ABB zur Verfügung gestellten Kalibriermethoden.
Weitere Informationen entnehmen Sie bitte dem Produkthandbuch.
Kalibrierungsarten
Kalibrierungsart Beschreibung Kalibriermethode
Standardkalibrie- Der kalibrierte Roboter wird an der Kalibrierpo- Axis Calibration
rung sition positioniert.
Die Standard-Kalibrierungsdaten befinden sich
auf der seriellen Messbaugruppe (SMB) oder
EIB im Roboter.
Für Roboter mit RobotWare 5.04 oder älter
sind die Daten in der Datei calib.cfg enthalten,
die zusammen mit dem Roboter geliefert wird.
Die Datei gibt die korrekten Resolver-/Motor-
positionen entsprechend der Grundstellung
des Roboters an.
Kurze Beschreibung der Kalibriermethoden
Axis Calibration-Methode
Die Axis Calibration ist ein Standardverfahren zur Kalibrierung von IRB 390. Es ist
das exakteste und das für gute Leistungseigenschaften empfohlene
Standard-Kalibrierverfahren.
Die folgenden Routinen sind für die Axis Calibration verfügbar:
• Feinkalibrierung
• Umdrehungszähler aktualisieren
• Reference Calibration
Die Kalibrierausrüstung für das Axis Calibration wird als Werkzeugsatz geliefert.
Die tatsächlichen Anweisungen zur Ausführung des Kalibrierverfahrens und was
in jedem Schritt getan werden muss, werden am FlexPendant gegeben. Sie werden
Schritt für Schritt durch das Kalibrierverfahren geführt.
26 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.4.2 Feinkalibrierung
1.4.2 Feinkalibrierung
Allgemeines
Die Feinkalibrierung erfolgt mit dem Achsen-Kalibrierverfahren.
xx2000000006
Achsen
Pos. Beschreibung Pos. Beschreibung
1 Achse 1 2 Achse 2
3 Achse 3 4 Achse 4
5 Achse 5
Produktspezifikation - IRB 390 27
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.4.3.1 Synchronisierungsmarkierungen und Synchronisierungsposition für Achsen
1.4.3 Synchronisierungsmarkierungen und Richtungen der Achsenbewegung
1.4.3.1 Synchronisierungsmarkierungen und Synchronisierungsposition für Achsen
Einleitung
Dieser Abschnitt zeigt die Position der Synchronisierungsmarkierungen und die
Synchronisierungsposition für jede Achse.
Synchronisierungsmarkierungen, IRB 390
xx2000000004
28 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
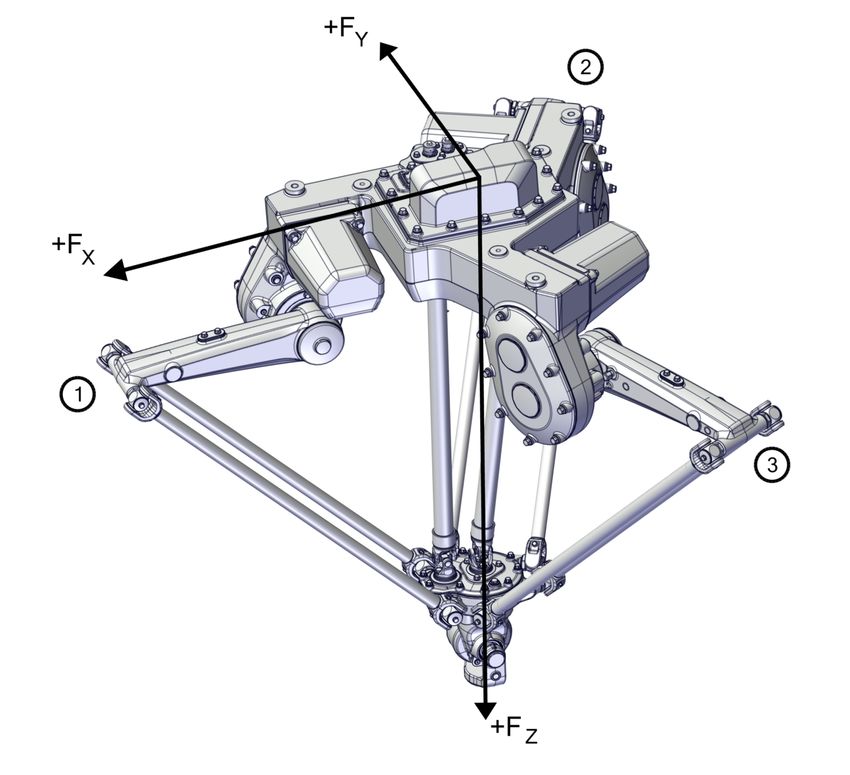
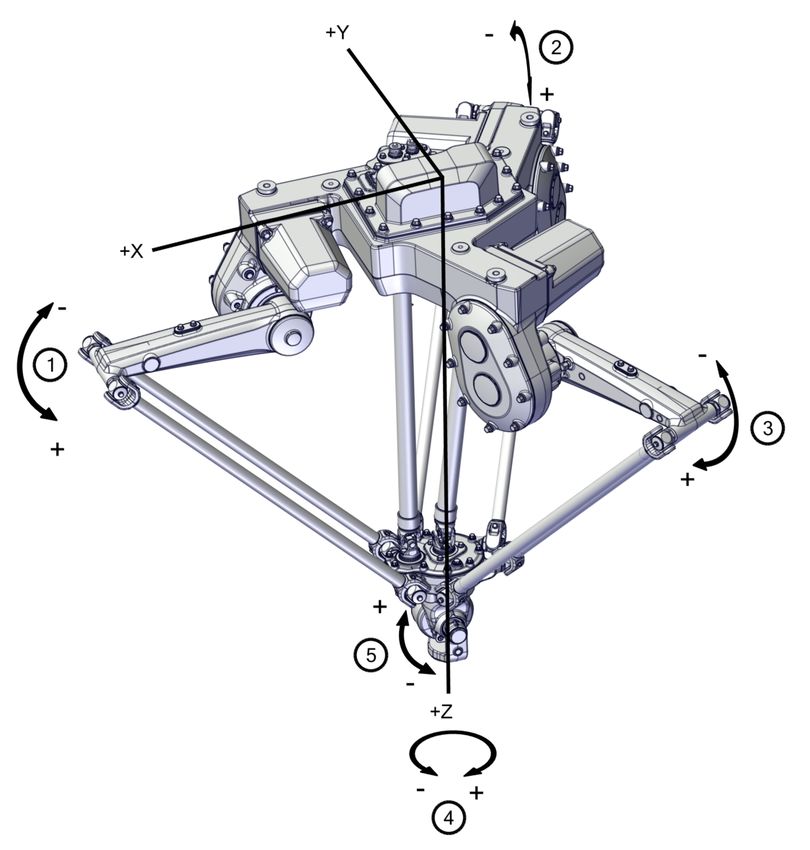
1.4.3.2 Richtungen der Kalibrierbewegungen
1.4.3.2 Richtungen der Kalibrierbewegungen
Überblick
Beim Kalibrieren muss sich die Achse ständig in gleicher Richtung zur
Kalibrierposition bewegen, um Positionsfehlern vorzubeugen, die aufgrund von
Flankenspiel usw. entstehen können. Positive Richtungen werden in der unten
stehenden Abbildung gezeigt.
Kalibrier-Serviceroutinen verarbeiten die Kalibrierbewegungen automatisch, und
diese können sich von den unten gezeigten positiven Richtungen unterscheiden.
Kalibrierbewegung und Bewegungsrichtungen
Die Abbildung unten zeigt die positiven und negativen Richtungen für jede Achse
und die linearen Bewegungsrichtungen des Roboters im Basis-Koordinatensystem.
xx2000000006
Produktspezifikation - IRB 390 29
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.5.1 Einleitung
1.5 Lastdiagramme
1.5.1 Einleitung
WARNUNG
Es ist äußerst wichtig, immer die zutreffenden, tatsächlichen Lastdaten und die
richtige Nutzlast des Roboters zu definieren. Eine falsche Definition der Lastdaten
kann zu einer Überlastung des Roboters führen.
Wenn falsche Lastdaten und/oder Lasten außerhalb des Lastdiagramms
verwendet werden, können die folgenden Teile aufgrund von Überlastung
beschädigt werden:
• Motoren
• Getriebe
• mechanischer Aufbau
WARNUNG
Für Roboter, die mit falschen Lastdaten und/oder Lasten außerhalb des
Lastdiagramms betrieben werden, ist die Robotersachmängelhaftung nicht gültig.
Allgemeines
Die Lastdiagramme enthalten ein nominales Nennlastträgheitsmoment. Das J0 für
den IRB 390 - 10/1300 beträgt 0,08 kgm 2 und für den IRB 390 - 10/1300 0,15 kgm 2 .
Hohe Lastträgheitsmomente beeinträchtigen die Leistung.
Das maximal erlaubte Trägheitsmoment um Achse 5 und 4 beträgt 2 kgm 2 . Der
Abstand von der Kundenschnittstelle zur Mitte der Drehachse 5 beträgt 0,097 m.
Der IRB 390 ist nur für die Deckenmontage ausgelegt, andere Ausrichtungen sind
nicht zulässig.
30 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.5.2 Lastdiagramme
1.5.2 Lastdiagramme
Hinweis
Das für Lasten zulässige Gewicht umfasst Greifer usw.
Die Datentypen loaddata und tooldata mit Trägheitsmoment müssen
verwendet werden!
IRB 390 - 15/1300
0.70
2 KG
0.60
0.50
4 KG
Z-distance (m)
0.40
6 KG
0.30 8 KG
10 KG
12 KG
0.20 15 KG
0.10
0.00
0.00 0.10 0.20 0.30
L-distance (m)
xx2000001805
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 31
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.5.2 Lastdiagramme
Fortsetzung
IRB 390 - 10/1300
0.70
0.60
2 KG
0.50
3 KG
Z-distance (m)
0.40
4 KG
0.30
6 KG
0.20 8 KG
10 KG
0.10
0.00
0.00 0.10 0.20 0.30 0.40 0.50
L-distance (m)
xx2000001806
An Manipulatorarmen montierte Zusatzausrüstung
Die Oberarmlasten müssen als Armlasten für die Achse 1, 2 bzw. 3 deklariert
werden. Die zusätzlichen Last am Deltagehäuse sollte als Armlastdaten hinzugefügt
werden (gekennzeichnet in RobotWare als r1_load_4). Die zusätzlichen
Unterarmlasten können zwischen der entsprechenden Unterarmlast und der
Deltagehäuselast geteilt werden.
Maximale Zusatzlast am Oberarm 0.5 kg
Unterarm 0.15 kg
Delta-Gehäuse 0.5 kg
Fortsetzung auf nächster Seite
32 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.5.2 Lastdiagramme
Fortsetzung
120
70 40
40
136
Allowed center of gravity
for extra loads on upper arms.
Allowed center of gravity
for extra loads on lower arms.
xx2000002037
Produktspezifikation - IRB 390 33
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.5.3 Maximale TCP Beschleunigung
1.5.3 Maximale TCP Beschleunigung
Maximale kartesische Gestaltungsbeschleunigung für nominale Lasten
Robotertyp E-Stopp Gesteuerte Bewegung
Maximale Beschleunigung bei Maximale Beschleunigung bei nomi-
nominaler Last COG [m/s 2 ] naler Last COG [m/s 2 ]
IRB 390-15/1300 99 82
IRB 390-10/1300 141 98
Hinweis
Beschleunigungsebenen für E-Stopp und gesteuerte Bewegung umfassen die
Beschleunigung aufgrund von Schwerkräften. Die Nennlast ist definiert mit der
Nennmasse und COG mit maximaler Verschiebung in Z and L (siehe
Lastdiagramm).
34 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen)
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen)
Roboterabmessungen
Die Abbildung zeigt die Abmessungen des Roboters.
Die Ansicht A-A wird gezeigt in Befestigungsbohrungen für Zusatzlasten an der
Deltaeinheit. auf Seite 41.
IRB 390 - 15/1300
808
675
624
350
129
69
425
290 262
380
1463
A A
975
785
xx2000001845
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 35
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen)
Fortsetzung
IRB 390 - 10/1300
808
675 Z=0
624
350
129
69
425
290 262
380
A A
975
1615
785
104
xx2000001839
Die Ansicht A-A wird gezeigt in Befestigungsbohrungen für Zusatzlasten an der
Deltaeinheit. auf Seite 41.
Fortsetzung auf nächster Seite
36 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen)
Fortsetzung
Mechanische Schnittstelle des Werkzeugflanschs
22.5° 8 H8 14 30°
6 H8 8
6x M8 12
8x M8 12
8x
45
°
80
6x
63
6
0°
40 H8 12
80
40
56 H8 6,5
100 h8
IRB 390-10/1300 IRB 390-15/1300
xx2000002064
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 37
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen)
Fortsetzung
Befestigungsbohrungen und Abmessungen für Zusatzlasten
Am Roboter können Zusatzlasten montiert werden. Definitionen von Abständen
und Maßen finden Sie in den folgenden Abbildungen. Der Roboter ist mit Bohrungen
zur Montage von Zusatzausrüstung ausgestattet. Die maximal zulässige Armlast
hängt vom Schwerpunkt der Armlast und der Nutzlast des Roboters ab.
Schwerkraft für Zusatzlasten an den Ober- und Unterarmen
A
120
70 40
40
136
B
xx2000002341
A Zulässige Schwerkraft für Zusatzlasten an den Oberarmen.
B Zulässige Schwerkraft für Zusatzlasten an den Unterarmen.
Fortsetzung auf nächster Seite
38 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen)
Fortsetzung
Befestigungsbohrungen für Zusatzlasten an den Oberarmen.
Oben auf jedem Oberarm ist ein Satz mit zwei M6-Bohrungen angebracht, die für
die Befestigung von Ausrüstung verwendet werden können. Maximale Zusatzlast:
0,5 kg/Oberarm.
24,5°
3x 120°
30
204
6x M6 17
D
VIEW D
xx2000001847
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 39
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen)
Fortsetzung
Befestigung von Zusatzlasten an den Oberarmen
Die Unterarme sind nicht mit Bohrungen zur Montage von Zusatzausrüstung
ausgestattet. Verwenden Sie für die Befestigung von Zusatzausrüstung an den
Unterarmen geformte Klemmblöcke. Es können Kunststoffkabelbinder befestigt
werden, allerdings besteht die Gefahr, dass der Lack beschädigt wird. Verwenden
Sie Metall nicht direkt an den Unterarmen Max. Zusatzlast 0,15 kg/Unterarm.
425
975
xx2000001849
Fortsetzung auf nächster Seite
40 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.6 Befestigen der Ausrüstung am Roboter (Roboterabmessungen)
Fortsetzung
Befestigungsbohrungen für Zusatzlasten an der Deltaeinheit.
Der Satz mit den drei M6-Öffnungen oben auf der Deltaeinheit kann für die
Befestigung der Zusatzausrüstung verwendet werden. Max. Zusatzlast an der
Deltaeinheit: 0,5 kg.
3x
12
0 °
3x M6 9
A A
A-A
xx2000001848
Güte der Befestigungen
Verwenden Sie zum Anbringen von Werkzeugen am Werkzeugflansch nur
Schrauben der Klasse 12,9. Verwenden Sie passende Schrauben und
Anzugsdrehmomente für Ihre Anwendung.
Produktspezifikation - IRB 390 41
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.7 Wartung und Fehlerbehebung
1.7 Wartung und Fehlerbehebung
Allgemeines
Der Roboter benötigt bei Betrieb nur ein Minimum an Wartung. Er wurde so
konstruiert, dass die Wartung so einfach wie möglich ist:
• Es werden wartungsfreie AC-Motoren verwendet.
• Für die Getriebe wird Öl verwendet.
• Alle Kabel sind fixiert, keine Bewegungen. Im unwahrscheinlichen Fall eines
Fehlers erleichtert der modulare Aufbau den Austausch.
Wartung
Die Wartungsintervalle hängen von der Verwendung des Roboters ab. Die
erforderlichen Wartungsmaßnahmen hängen auch von den gewählten Optionen
ab. Genauere Informationen zu Wartungsarbeiten finden Sie im
Produkthandbuch - IRB 390.
42 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.8.1 Arbeitsbereich
1.8 Roboterbewegung
1.8.1 Arbeitsbereich
Illustration, Arbeitsbereich IRB 390 - 15/1300
In der Abbildung wird der uneingeschränkte Arbeitsbereich des Roboters gezeigt.
Z
Z=0
Y
X
-56°
10°
0°
c
b +90°
a
TCP
d
e 15kg
xx1900001423
Abmessungen
Messung a Messung b Messung c Messung d Messung e
1 463 mm 1 274 mm 1 063 mm 475 mm 650 mm
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 43
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.8.1 Arbeitsbereich
Fortsetzung
Illustration, Arbeitsbereich IRB 390 - 10/1300
In der Abbildung wird der uneingeschränkte Arbeitsbereich des Roboters gezeigt.
Z
Z=0
Y
X
-56°
10°
0°
105
Axis 5
c
b
+90°
a
WCP
d
e
xx1900001422
Abmessungen
Messung a Messung b Messung c Messung d Messung e
1 518 mm 1 329 mm 1 118 mm 380 mm 650 mm
44 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.8.2 Leistung gemäß ISO 9283
1.8.2 Leistung gemäß ISO 9283
Allgemeines
Bei Nennlast und einer Geschwindigkeit von 1,6 m/s auf der ISO-Testebene mit
allen vier Roboterachsen in Bewegung und mit unterschiedlicher Nutzlast. Die
Werte in der nachfolgenden Tabelle sind das durchschnittliche Ergebnis der
Messungen bei einer kleinen Anzahl von Robotern. Das Ergebnis kann abhängig
von der Position des Roboters im Arbeitsbereich, der Geschwindigkeit, der
Armkonfiguration, der Richtung, aus der sich der Position genähert wird, und der
Laderichtung des Armsystems abweichen. Spiel in den Getrieben wirkt sich auch
auf das Ergebnis aus.
Die Werte für AP, RP, AT und RT werden gemäß der folgenden Abbildung
gemessen.
xx0800000424
Stelle Beschreibung Stelle Beschreibung
A Programmierte Position E Programmierte Bahn
B Mittlere Position bei Program- D Tatsächlicher Pfad bei Programmaus-
mausführung führung
AP Mittlerer Abstand von pro- AT Maximale Abweichung von E zur
grammierter Position durchschnittlichen Bahn
RP Toleranz von Position B bei RT Toleranz der Bahn bei wiederholter
wiederholter Positionierung Programmabarbeitung
IRB 390 IRB 390 - 15/1300 IRB 390 - 10/1300
Positionsgenauigkeit, AP i (in mm) 0.01 0,08
Positionswiederholgenauigkeit, RP (in mm) 0.01 0,08
Positionsstabilisierungszeit, PSt (in s) bei einer Ab- 0.22 1.09
weichung von höchstens 0,1 mm
Positionsstabilisierungsüberschwingung, PSo 0.60 0.55
Bahngenauigkeit, AT (in mm) 0.57 1,53
Bahnwiederholbarkeit, RT (in mm) 0.07 0,06
i AP ist gemäß dem oben beschriebenen ISO-Test die Differenz zwischen der programmierten
Position (in der Zelle manuell geänderte Position) und der während der Programmabarbeitung
erzielten Durchschnittsposition.
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 45
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.8.2 Leistung gemäß ISO 9283
Fortsetzung
Spiel, Achse 4 und 5
Schutzklasse Wert
Standard 20 Bogen Minute
Geschwindigkeit
Richtung Beschreibung
IRB 390 - 15/1300 5,7 m/s
IRB 390 - 10/1300 5 m/s
46 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.1 Beschreibung
1.9.1 Einführung in typische Zykluszeiten
1.9 Typische Zykluszeiten
1.9.1 Einführung in typische Zykluszeiten
Allgemeines
Beide Zyklen umfassen eine Air-Aktivierungsdauer von jeweils 35 ms für Aufnahme
und Platzierung. Die Air-Aktivierung findet während der Zykluszeit statt.
Beschreibung typischer Zyklen
Zyklus 1 ist eine Bewegung von 90 - 400 - 90, mit einer 90-Grad-Drehung von Achse 4.
Zyklus 2 ist eine Bewegung von 90 - 700 - 90, mit einer 90-Grad-Drehung von Achse 4.
Ungefähre Zykluszeiten
IRB 390-15/1300
Nutzlast 5.0 kg 15.0kg
Zyklus 1 0.67 0.79
Zyklus 2 0.81 0.96
IRB 390-10/1300
Nutzlast 5,0 kg 10,0 kg
Zyklus 1 0.74 0.79
Zyklus 2 0.90 0.98
Produktspezifikation - IRB 390 47
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.Diese Seite wurde absichtlich leer gelassen
2 Spezifikation der Varianten und Optionen
2.1 Einführung in Varianten und Optionen
2 Spezifikation der Varianten und Optionen
2.1 Einführung in Varianten und Optionen
Allgemeines
In den folgenden Abschnitten werden die verschiedenen Varianten und Optionen
für IRB 390 beschrieben. Die hier verwendeten Optionsnummern sind mit denen
im Spezifikationsformular identisch.
Die Varianten und Optionen der Robotersteuerung sind in der Produktspezifikation
der Steuerung beschrieben.
Produktspezifikation - IRB 390 49
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.2 Spezifikation der Varianten und Optionen
2.2 Manipulator
2.2 Manipulator
Varianten
Option Beschreibung
435-140 IRB 390-15/1300
435-141 IRB 390-10/1300
Schutzklasse
Option Beschreibung
287-4 Standard, IP67
Kennzeichen am Manipulator
Option Beschreibung
334-1 ABB
334-3 KEINE
Resolveranschluss Achse 7
Ein Anschluss am Sockel für Resolversignale für Achse 7.
Option Beschreibung
864-1 Am Sockel
Sicherheitswarnleuchte
Option Beschreibung
213-1 Am Roboterrahmen kann eine Sicherheitswarnleuchte mit orangefarbenem
Dauerlicht montiert werden. Kabellänge 400 mm. Die Warnleuchte leuchtet
im Betriebszustand MOTORS ON.
xx2000002036
Fortsetzung auf nächster Seite
50 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.2 Spezifikation der Varianten und Optionen
2.2 Manipulator
Fortsetzung
Sachmängelhaftung
Für die gewählte Zeitspanne wird ABB Ersatzteile und Arbeit für die Instandsetzung
oder den Ersatz des nicht konformen Teils der Ausrüstung ohne zusätzliche Kosten
bereitstellen. Während dieses Zeitraums ist eine jährliche vorbeugende Wartung
gemäß den Handbüchern erforderlich, die von ABB ausgeführt werden muss. Wenn
der Kunde dies verweigert, können im ABB Ability Service Condition Monitoring
& Diagnostics keine Daten für Roboter mit OmniCore-Steuerungen analysiert
werden. Dann muss ABB zum Standort reisen, wobei Reisekosten für den Kunden
anfallen. Die erweiterte Garantiezeitraum beginnt stets am Tag des Ablaufs der
Garantie. Garantiebedingungen gemäß Definition in den Allgemeinen
Geschäftsbedingungen.
Hinweis
Die vorstehende Beschreibung ist nicht anwendbar auf die Option Stock warranty
[438-8]
Option Typ Beschreibung
438-1 Standardsachmängel- Die Standardgarantie gilt 12 Monate ab Lieferungsdatum
haftung an den Kunden oder bis spätestens 18 Monate nach
Versanddatum, je nachdem, was zuerst eintritt. Die Ga-
rantie unterliegt den allgemeinen Geschäftsbedingungen.
438-2 Standardsachmängel- Erweiterte Standardsachmängelhaftung mit zusätzlichen
haftung + 12 Monate 12 Monaten ab Ablaufdatum der Standardsachmängel-
haftung. Es gelten die Sachmängelhaftungvorschriften.
Wenden Sie sich bei anderen Anforderungen an den
Kundendienst.
438-4 Standardsachmängel- Erweiterte Standardsachmängelhaftung mit zusätzlichen
haftung + 18 Monate 18 Monaten ab Ablaufdatum der Standardsachmängel-
haftung. Es gelten die Sachmängelhaftungsvorschriften.
Wenden Sie sich bei anderen Anforderungen an den
Kundendienst.
438-5 Standardsachmängel- Erweiterte Standardsachmängelhaftung mit zusätzlichen
haftung + 24 Monate 24 Monaten ab Ablaufdatum der Standardsachmängel-
haftung. Es gelten die Sachmängelhaftungvorschriften.
Wenden Sie sich bei anderen Anforderungen an den
Kundendienst.
438-6 Standardsachmängel- Erweiterte Standardsachmängelhaftung mit zusätzlichen
haftung + 6 Monate 6 Monaten ab Ablaufdatum der Standardsachmängelhaf-
tung. Es gelten die Sachmängelhaftungvorschriften.
438-7 Standardsachmängel- Erweiterte Standardsachmängelhaftung mit zusätzlichen
haftung + 30 Monate 30 Monaten ab Ablaufdatum der Standardsachmängel-
haftung. Es gelten die Sachmängelhaftungvorschriften.
Fortsetzung auf nächster Seite
Produktspezifikation - IRB 390 51
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.2 Spezifikation der Varianten und Optionen
2.2 Manipulator
Fortsetzung
Option Typ Beschreibung
438-8 Bestandssachmängel- Maximal 6 Monate verzögerte Standardsachmängelhaf-
haftung tung, ab Versanddatum. Beachten Sie, dass keine An-
sprüche für Sachmängelhaftungsfälle geltend gemacht
werden können, die vor dem Ende der Bestandssach-
mängelhaftung aufgetreten sind. Die Standardsachmän-
gelhaftung beginnt automatisch nach 6 Monaten ab dem
Versanddatum oder ab dem Aktivierungsdatum der
Standardsachmängelhaftung in WebConfig.
Hinweis
Es gelten besondere Bedingungen, siehe Robotics
Sachmängelhaftungsrichtlinien.
Remote Service aktiviert
Option Beschreibung
890-4 Connected Services 3G
890-5 Connected Services WLAN
52 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.2 Spezifikation der Varianten und Optionen
2.3 Bodenkabel
2.3 Bodenkabel
Manipulatorkabel – Länge
Option Beschreibung
210-1 3m
210-2 7m
210-3 15 m
210-4 22 m
210-5 30 m
Produktspezifikation - IRB 390 53
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.2 Spezifikation der Varianten und Optionen
2.4 Prozess
2.4 Prozess
Process Module (Prozessmodul)
Option Typ Beschreibung
768-1 Empty Cabinet (Leerer Siehe Produktspezifikation - Steuerung IRC5 mit
Schrank), klein FlexPendant.
768-2 Empty Cabinet (Leerer Siehe Produktspezifikation - Steuerung IRC5 mit
Schrank), groß FlexPendant.
715-1 Installationssatz Siehe Produktspezifikation - Steuerung IRC5 mit
FlexPendant.
54 Produktspezifikation - IRB 390
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.3 Zubehör
3.1 Einführung in Zubehör
3 Zubehör
3.1 Einführung in Zubehör
Allgemeines
Es ist ein breites Sortiment von speziell für den Manipulator konstruierten
Werkzeugen und Ausrüstung erhältlich.
Basic Software und Software-Optionen für Roboter und PC
Weitere Informationen finden Sie unter Produktspezifikation - IRC5-Steuerung und
Produktspezifikation - Steuerungssoftware IRC5.
PickMaster und Vision System
Weitere Informationen finden Sie im Produktspezifikation - PickMaster Twin.
Produktspezifikation - IRB 390 55
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.Diese Seite wurde absichtlich leer gelassen
Index
Index EN ISO, 16
O
A Öl
Abmessungen Menge in Getrieben, 24
Roboter, 35 Ölsorte, 24
Anforderungen an das Fundament, 13 Optionen, 49
Arbeitsbereich
Roboter, 43 P
Ausrüstung, Roboter, 35 Positive Richtungen, Achsen, 29
Produktnormen, 16
B
befestigen, Ausrüstung, 35 R
Belastung des Fundaments, 12 Richtung der Achsen, 29
Bestandssachmängelhaftung, 51 Roboter
Betriebsbedingungen, 14 Abmessungen, 35
Arbeitsbereich, 43
D Ausrüstung, befestigen, 35
Drehmomente auf Fundament, 12 Schutzarten, 14
Schutzklasse, 14
F Technische Daten, 12
Fundament
Roboter am Fundament befestigen,
Anforderungen, 13
Befestigungsschrauben, 23
G S
Getriebe
Sachmängelhaftung, 51
Getriebepositionen, 24
Schmierung
Gewicht, 12
Art der Schmierung, 24
I Menge in Getrieben, 24
Installation Schutzart, 14
Ausrüstung, 35 Schutzklassen, 14
Sicherheitsnormen, 16
K Skalen am Roboter, 28
Kalibirierung Standardsachmängelhaftung, 51
Standard, 26 Synchr.-Markierungen, 28
Kalibriermarkierungen, 28
Kalibrierposition T
Skalen, 28 Technische Daten
Kalibrierskalen, 28 Roboter, 12
Temperaturen
L Betrieb, 14
Lagerbedingungen, 14 Lager, 14
Luftfeuchtigkeit
Betrieb, 14 U
Lager, 14 Umgebungsfeuchtigkeit
Betrieb, 14
M Lager, 14
Montage, Ausrüstung, 35 Umgebungstemperatur
Betrieb, 14
N Lager, 14
Negative Richtungen, Achsen, 29
Normen, 16 V
ANSI, 16 Varianten, 49
CAN, 16
EN IEC, 16 Z
Zusatzausrüstung, 35
Produktspezifikation - IRB 390 57
3HAC066568-003 Revision: C
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.ABB AB
Robotics & Discrete Automation
S-721 68 VÄSTERÅS, Sweden
Telephone +46 (0) 21 344 400
ABB AS
Robotics & Discrete Automation
Nordlysvegen 7, N-4340 BRYNE, Norway
Box 265, N-4349 BRYNE, Norway
Telephone: +47 22 87 2000
ABB Engineering (Shanghai) Ltd.
Robotics & Discrete Automation
No. 4528 Kangxin Highway
PuDong District
SHANGHAI 201319, China
Telephone: +86 21 6105 6666
ABB Inc.
Robotics & Discrete Automation
1250 Brown Road
Auburn Hills, MI 48326
USA
Telephone: +1 248 391 9000
abb.com/robotics
3HAC066568-003, Rev C, de
© Copyright 2020 - 2021 ABB. Alle Rechte vorbehalten.
Spezifikationen können ohne vorherige Ankündigung geändert werden.Sie können auch lesen