Bachelorarbeit - opus4.kobv.de
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Bachelorarbeit
im Studiengang User Experience Design (UXD)
Fakultät Informatik
Einfluss von Gamification auf das Fahrerlebnis in kooperativen
hochautomatisierten Fahrzeugen
Vor- und Zuname: Rebecca Bussner
ausgegeben am: 19.04.2021
abgegeben am: 17.09.2021
Erstprüfer: Prof. Priv.-Doz. Dr. techn. Andreas Riener
Zweitprüfer: MSc Jakob Peintner
I Erklärung/Affidavit Ich erkläre hiermit, dass ich die Arbeit selbstständig verfasst, noch nicht anderweitig für Prü- fungszwecke vorgelegt, keine anderen als die angegebenen Quellen oder Hilfsmittel benutzt sowie wörtliche und sinngemäße Zitate als solche gekennzeichnet habe. Ingolstadt, Rebecca Bussner Rebecca Bussner Bachelorarbeit

II Kurzfassung Die vorliegende Arbeit evaluiert den Einfluss von Gamification auf das Fahrerlebnis im Zu- sammenhang mit kooperativem hochautomatisierten Fahren. Das Ziel dieser Studie ist es zu untersuchen, ob Gamification die Interaktionsbereitschaft, User Experience und Bedienbarkeit verbessern kann. Dazu wurde ein Gamification-Konzept für ein kooperatives hochautomatisier- tes Fahrzeug konzipiert und evaluiert. Das Anzeigekonzept soll die Interaktion mit dem System in kritischen Situationen unterstützen. Die Befunde zeigen, dass der Gamification-Ansatz keine signifikanten Unterschiede im Vergleich zu dem Baseline-Konzept erzielte. Unabhängig davon fa- vorisierte die Mehrheit der Probanden das Gamification-Konzept. Reihenfolge-Effekte bezüglich der Interaktionszeiten weisen außerdem darauf hin, dass möglicherweise durch ein angepasstes Studiendesign deutlichere Unterschiede entdeckt werden könnten. Auf der Grundlage der zuvor dargestellten Ergebnisse werden am Ende dieser Arbeit entsprechende Implikationen für weitere Studien diskutiert. Rebecca Bussner Bachelorarbeit
III Abstract This paper evaluates the impact of gamification on the driving experience in the context of co- operative highly automated driving. The goal of this study is to investigate whether gamification can improve the willingness to interact, the user experience and the usability. Therefore, a gami- fication concept for a collaborative autonomous vehicle was designed and evaluated. The concept is intended to support the interaction with the system in critical situations. The findings show that the gamification approach did not achieve significant differences compared to the baseline concept. Regardless, the majority of participants favored the gamification concept. Sequence ef- fects regarding the interaction times also indicate that significant differences could possibly be discovered by an adapted study design. Such implications for further studies are discussed at the end of this paper based on the findings presented previously. Rebecca Bussner Bachelorarbeit
IV
Inhaltsverzeichnis
Erklärung/Affidavit I
Kurzfassung II
Abstract III
1. Einleitung 1
1.1. Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2. Zielsetzung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2. Theoretischer Hintergrund 5
2.1. Autonomes Fahren und kooperatives autonomes Fahren . . . . . . . . . . . . . . 5
2.1.1. Autonomes Fahren . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.2. Kooperatives autonomes Fahren . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2. Gamification . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1. Gamification: Begriffsbestimmung . . . . . . . . . . . . . . . . . . . . . . 7
2.2.2. Gamification im automobilen Kontext . . . . . . . . . . . . . . . . . . . . 8
2.3. Modelle für das Verstehen und die Anwendung von Gamification . . . . . . . . . 9
2.3.1. Flow Theorie nach Mihály Csíkszentmihályi . . . . . . . . . . . . . . . . . 9
2.3.2. Octalysis-Framework von Yu-Kai Chu . . . . . . . . . . . . . . . . . . . . 10
3. Methodisches Vorgehen 12
3.1. Konzipierung des Baseline- und Gamification-Konzepts . . . . . . . . . . . . . . . 12
3.2. Versuchsdesign . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
3.3. Verfahren und Variablen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
3.4. Versuchsdurchführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.5. Stichprobe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
4. Ergebnisse 19
4.1. Evaluierung der Interaktionsbereitschaft . . . . . . . . . . . . . . . . . . . . . . . 19
4.2. Ergebnisse bezüglich des Nutzungserlebnisses . . . . . . . . . . . . . . . . . . . . 19
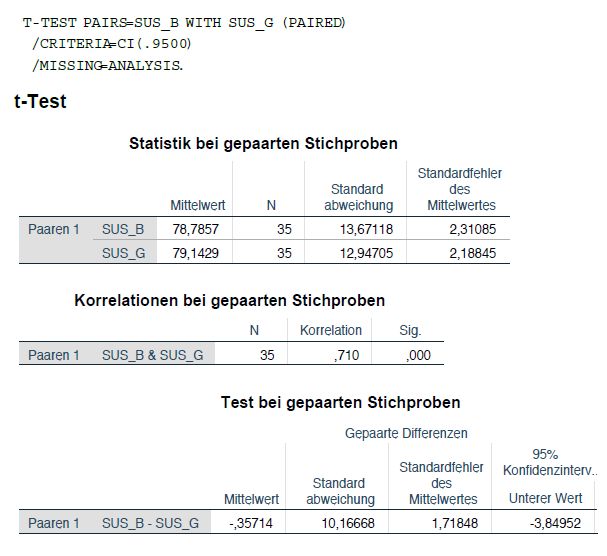
4.3. Ergebnisse bezüglich der Bedienbarkeit . . . . . . . . . . . . . . . . . . . . . . . . 22
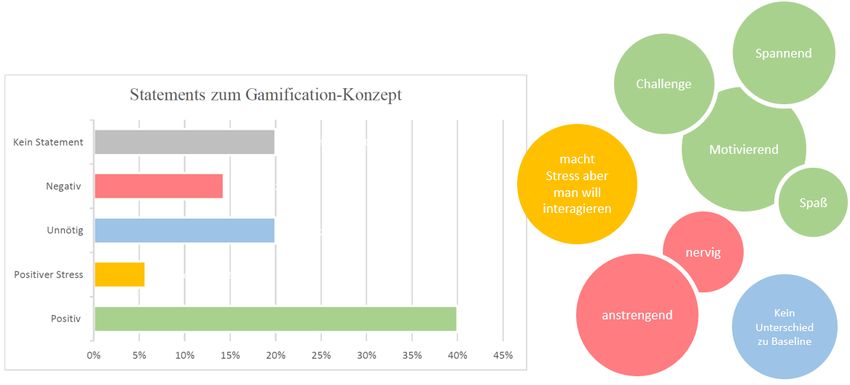
4.4. Auswertung der qualitativen Erhebung . . . . . . . . . . . . . . . . . . . . . . . . 23
5. Diskussion 25
5.1. Zusammenfassung der Ergebnisse und inhaltliche Diskussion . . . . . . . . . . . . 25
5.2. Methodische Diskussion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
6. Zusammenfassung 27
Abkürzungsverzeichnis VI
A. Anhang XII
A.1. Einführung in die Studie - Leitfaden . . . . . . . . . . . . . . . . . . . . . . . . . XII
A.2. Screen Designs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XIV
A.2.1. Baseline-Konzept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XIV
A.2.2. Gamification-Konzept . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XV
A.3. Fragebogen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XVII
A.4. Rohdaten des Fragebogens für die statistische Auswertung . . . . . . . . . . . . . XXI
Rebecca Bussner Bachelorarbeit
V
A.5. Qualitative Fragen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XXIII
A.6. SPSS Auswertung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XXV
A.6.1. Interaktionsbereitschaft . . . . . . . . . . . . . . . . . . . . . . . . . . . . XXV
A.6.2. User Experience Questionnaire . . . . . . . . . . . . . . . . . . . . . . . . XXVI
A.6.3. Acceptance Scale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XXVII
A.6.4. System Usability Scale . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XXVIII
A.6.5. Anzahl richtiger Interaktionen . . . . . . . . . . . . . . . . . . . . . . . . . XXIX
A.6.6. Interaktionszeiten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . XXX
Rebecca Bussner Bachelorarbeit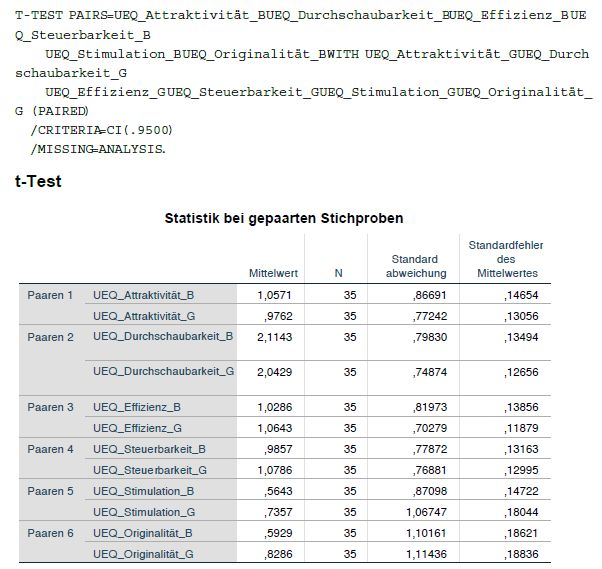
1 1. Einleitung Die Automatisierung von Fahrzeugen schreitet immer weiter voran. Besonders Deutschland ver- sucht dabei eine führende Rolle einnehmen. Um diese Ziele erreichen zu können, müssen zunächst die Rahmenbedingungen angepasst werden. Bereits 2017 trat das Gesetz zum automatisierten Fahren (Änderung des Straßenverkehrsgesetzes) in Kraft [10]. Eine zentrale Rolle spielten hierbei veränderte Rechte und Pflichten des Fahrzeugführers während der automatisierten Fahrt. Das bedeutet, dass automatisierte Systeme der Stufe 3 die Fahraufgabe unter bestimmten Bedingun- gen übernehmen dürfen. Dem Fahrer ist es erlaubt, sich währenddessen fahrfremden Tätigkeiten zuzuwenden, er muss aber jederzeit bereit sein, an das Steuer zurückzukehren, wenn das System an Grenzen der Automatisierung stößt. Derzeit werden die Weichen für den nächsten großen Schritt bezüglich autonomen Fahrens gelegt. Ein zukunftsweisendes Gesetz wurde im Juli 2021 verabschiedet [9]. Damit soll der Einsatz autonomer Fahrzeuge der Stufe 4 in verschiedenen Mobilitätsbereichen ermöglicht werden. Unter anderem erlaubt das Gesetz die ausschließliche Fahrzeugsteuerung durch ein autonomes System. Laut Bundesverkehrsministerium ist Deutsch- land damit das erste Land, das fahrerlose Kraftfahrzeuge in den Regelbetrieb bringt [10]. Durch diese gesetzliche Grundlage ist der erste Schritt in den Verkehr von morgen getan. Unabhängig davon ist der Weg bis zum voll-autonomen Fahren (Level 5) noch weit. Ein Para- debeispiel für eine Innovation, die dem sogenannten Hype-Zyklus folgt [28] [3]: Als Google 2012 eine Freigabe für ein autonomes Fahrzeug zu Testzwecken erhielt, waren die Erwartungen hoch. Zwischenzeitlich gab es jedoch einige Unfälle, die die Begeisterung für das autonome Fahren deutlich bremsten. Mittlerweile verbreiten sich jedoch fast unbemerkt immer mehr autonome Fahrzeuge: Shuttlebusse auf Firmen- und Universitätsgeländen, Transporter in Fabriken oder ei- nige Roboterbusse im öffentlichen Straßenverkehr, wie zum Beispiel in Berlin, Hamburg oder seit 2017 im niederbayerischen Bad Birnbach [6]. Das autonome Fahren (Level 4) befindet sich nun in Phase 4 des Hype-Zyklus: Ein Verständnis für die Innovation hat sich entwickelt und es wer- den realistische Anwendungsfelder und Grenzen der Technologie festgestellt [28]. Die Forschung hat erkannt, dass vorerst bestimmte Situationen bleiben werden, die von einem Menschen besser bewältigt werden können [41]. In komplexeren Verkehrssituationen stößt die Automation immer noch an Grenzen und benötigt Hilfe.Eine Übergabe der Steuerung nach einem automatisierten Fahrtabschnitt kann jedoch eine Herausforderung für den Fahrer darstellen [41]. Fehlhandlun- gen aufgrund menschlicher Faktoren können nicht ausgeschlossen werden. Durch ein fehlendes Situationsbewusstsein ist die Wahrscheinlichkeit einer falschen Entscheidung enorm. Um dement- sprechend eine vollständige Übergabe zu vermeiden, gibt es bereits kooperative Ansätze, durch die der Fahrer und das System in Zusammenarbeit kritische Situationen meistern können [41] [8] [42]. In Abstimmung mit dem Fahrzeugführer können Handlungsentscheidungen getroffen werden, wodurch der Mensch immer noch zu einem gewissen Grad die Kontrolle behält, aber nicht aktiv die Fahraufgabe übernehmen muss. Die steigende Automatisierung kann jedoch die menschliche Leistung stark beeinträchtigen. Bainbridge [13] macht deutlich, dass es selbst für hochmotivierte Personen unmöglich ist, die Wachsamkeit aufrechtzuerhalten und dass Menschen daher nicht in der Lage sind, automatisierte Systeme über längere Zeiträume zu überwachen. Langwierige Überwachungsaufgaben sind schwer zu bewältigen und bringen Schwierigkeiten mit sich, wenn kurzfristig in eine kritische Situation eingegriffen werden muss. Wie können also die Nutzer nachhaltig motiviert werden, sich aktiv an den Fahrentscheidungen des autonomen Systems zu beteiligen? Studien zeigen, dass durch den Einsatz von Gamification im automobilen Kontext ein positiver Effekt in der Motivation, ein erhöhtes Bewusstsein und eine gesteigerter Freude erreicht werden kann [38]. Außerdem kann das Engagement des Fahrers deutlich verstärkt werden [39]. Daher scheint Gamification ein vielversprechendes Instrument für den Einsatz im kooperativen automatisierten Fahrzeug zu sein. Rebecca Bussner Bachelorarbeit
2
In diesem Zusammenhang soll geklärt werden, wie Gamification die Interaktionsbereitschaft
steigern und damit das Fahrerlebnis während einer kooperativen autonomen Fahrt optimieren
kann. Das Ziel dieser Bachelorarbeit ist es, ein gamifiziertes Anzeigekonzept zu entwickeln, das
die Interaktion mit dem System in kritischen Situationen unterstützen soll. Dadurch soll die
Interaktionsbereitschaft der Nutzenden, die User Experience und die Bedienbarkeit verbessert
werden. Das Vorgehen gliedert sich dabei in folgende Schritte:
1 Konzipierung des gamifizierten Anzeigekonzepts und eines Baseline-Konzepts für den di-
rekten Vergleich.
2 Evaluierung des konzipierten Anzeigekonzepts zur Gewinnung von Erkenntnissen für die
Weiterentwicklung künftiger Informations- und Anzeigekonzepte.
1.1. Motivation
Bereits jetzt sind die meisten neuwertigen Fahrzeuge in gewissen Bereichen automatisiert, begin-
nend mit standardmäßigen Fahrerassistenzsystemen (FAS) bis zur Teilautomation [29]. In Zu-
kunft sollen auch vollautomatisierte Fahrzeuge auf den Straßen unterwegs sein. Mit wachsender
Automatisierung wird der Fahrer immer mehr zum Beifahrer und die Kontrolle wird fortschrei-
tend an das Auto abgegeben. Das bereitet jedoch vielen Menschen Unbehagen, vor allem die
Angst vor unzuverlässiger Technik ist erheblich [33]. Das zeigen auch Statistiken, wie beispiels-
Abbildung 1: Statistik der Aussagen über autonomes Fahren in Deutschland; Quelle: Continental
AG, zitiert nach de.statista.com [12].
weise eine Umfrage der Continental AG in 2021 [12] (siehe Abbildung 1). Über 50 Prozent der
Befragten waren der Meinung, dass die Automatisierung nicht zuverlässig funktionieren wird.
Die gleiche Menge an Befragten gaben an, dass sie zudem besorgt seien. Außerdem meinten 60
Prozent der Teilnehmer, dass es dem Autofahren seinen Spaß nehmen würde. Auf der anderen
Seite denken auch über 50 Prozent, dass es schwere Unfälle vermeiden und eine nützliche Ver-
besserung darstellen kann. Diese Aussagen zeigen, dass die Befragten das autonome Fahren in
der Zukunft sehen, aber dennoch weiterhin Bedenken haben. Die Menschen sind scheinbar noch
Rebecca Bussner Bachelorarbeit
3 nicht bereit, völlig die Kontrolle abzugeben und blind in die Technik zu vertrauen. Die Akzeptanz in der Bevölkerung für die Technik ist noch ausbaufähig. Für diesen Konflikt gibt es Ansätze, welche den Menschen und seine Bedürfnisse mit einbezie- hen und die Kontrolle nicht vollkommen dem Fahrzeug überlassen. Beispielsweise das Konzept "Human-Centered Autonomous Vehicle" (HCAV) von Friedmann [23]. Ein, wie der Titel be- reits besagt, menschenzentrierter Entwurf für die Entwicklung kooperativer autonomer Systeme. Anstatt den Fahrer aus den Fahrentscheidungen herauszuhalten, zielt der menschenzentrierte Ansatz darauf ab, den Menschen zu integrieren. Friedmann definiert für die Konzeption, Ent- wicklung und Erprobung des Konzepts sieben "principles of shared autonomy". Der Grundsatz Nummer 6 "Unvollkommenheit durch Design" besagt, dass der Fahrer über die Möglichkeiten und Grenzen des Systems informiert werden sollte und nicht eine perfekte, sichere Blackbox- Navigation des Fahrzeugs das Ziel sein darf. Der Autor betont, dass die Kommunikation von Systemgrenzen eine tiefere Bindung des Fahrers an das Fahrzeug schaffen kann. Beim Verstecken von Systemunsicherheiten, -beschränkungen und -fehlern kann die Chance auf tieferes Vertrauen verpasst werden. Laut Friedmann ist dies einer der größten Fehler bei früheren Versuchen, teilau- tonome Systeme zu implementieren. Aus diesem Grund sollte die Mensch-Fahrzeug-Interaktion vielmehr gefördert werden. Dies kann über verschiedene Wege geschehen. Im Kontext der vorlie- genden Arbeit nehmen wir an, dass Gamification dabei einen wirksamen Beitrag leisten kann. Das Fahrerlebnis soll durch Spieledesignprinzipien bedeutend verbessert werden. Vielversprechende Ergebnisse zeigen bereits Studien, wie z.B. von Steinberger et al. [39]. Die Ergebnisse belegen, dass spielifizierte Umgebungen das Engagement des Fahrers fördern können und damit siche- res Fahren unterstützen. Armin Gräter, Bereichsleiter für funktionale Sicherheit bei der BMW Group, erklärte bereits 2018 in einem Interview, dass Gamification im automobilen Kontext die Sicherheit bei einer autonomen Fahrt steigern kann [24]. Die Bereitschaft zur Übernahme des Steuers nach einem automatisierten Fahrtabschnitt kann deutlich erhöht werden. Aufgrund der vielversprechenden Forschungsergebnisse und Expertenmeinungen haben wir uns in dieser Arbeit für einen Gamification-Ansatz entschieden. Dieser soll die Kooperation im autonomen Fahrzeug unterstützen und damit das Fahrerlebnis optimieren. Rebecca Bussner Bachelorarbeit
4
1.2. Zielsetzung
In dieser Arbeit soll ein Gamification-Konzept für kooperative hochautomatisierte Fahrzeuge
konzipiert werden, welches den Nutzer während einer automatisierten Fahrt unterstützen kann.
Anschließend soll durch die Evaluierung dieses Konzepts mittels einer Studie untersucht wer-
den, ob durch die Darbietung gamifizierter Inhalte das Fahrerlebnis bezüglich Interaktionsbe-
reitschaft, User Experience und Bedienbarkeit verbessert werden kann. In der Literatur hat sich
bereits gezeigt, dass Gamification einen positiven Einfluss auf die Motivation [38], die Übernah-
mebereitschaft [24] und die Sicherheit [39] im autonomen Fahrzeug haben kann. Daraus ergibt
sich die folgende Forschungsfrage mit zugehörigen Hypothesen:
RQ Kann der Einsatz von Gamification in kooperativen hochautomatisierten Fahr-
zeugen das Fahrerlebnis verbessern?
In diesem Zusammenhang untersuchen wir die folgenden Hypothesen:
H1 Der Einsatz von Gamification kann die Interaktionsbereitschaft im kooperati-
ven Fahrmodus steigern.
H2 Der Einsatz von Gamification kann die User Experience mit dem autonomen
System verbessern.
H3 Gamification kann die Bedienung des zu erlernenden autonomen Systems er-
leichtern.
Die Anwesen- oder Abwesenheit der unabhänigigen Variable (UV) Gamification ist dabei ent-
scheidend und soll gegenübergestellt werden. Macht die Anwesenheit einen signifikanten Un-
terschied und beeinflusst somit die abhängigen Variablen (AV) „Interaktionsbereitschaft“, „User
Experience“ und „Bedienbarkeit“ positiv? Dies soll anhand standardisierter Tests und physikali-
scher Messwerte interpretiert werden:
Der User Experience Questionnaire (UEQ) soll einen umfassenden Eindruck verschaffen, aber
vor allem die User Experience (H2) erfassen. Die Interaktionsbereitschaft (H1) soll anhand der
Interaktionshäufigkeiten untersucht werden, um quantitative Werte zu erhalten. Um die Erlern-
barkeit oder vielmehr die Bedienbarkeit (H3) des Systems zu testen, wird die Schnelligkeit und
die Fehlerrate aufgezeichnet und anschließend gegenübergestellt. Eine erleichterte Bedienung wird
sich durch eine niedrigere Fehlerrate und/oder kürzere Reaktionszeiten zeigen.
Rebecca Bussner Bachelorarbeit5 2. Theoretischer Hintergrund Da autonomes Fahren eine wichtige Rolle in dieser Arbeit darstellt, wird zunächst auf diesen The- menkomplex eingegangen (Kap. 2.1). Anschließend wird der Begriff Gamification (Kap. 2.2.1), bestimmt, bevor auf die Einordnung im Kontext des autonomen Fahrens eingegangen wird (Kap. 2.2.2). Abschließend werden bekannte Modelle für das Verstehen und die Anwendung von Gami- fication beleuchtet (Kap. 2.3). 2.1. Autonomes Fahren und kooperatives autonomes Fahren 2.1.1. Autonomes Fahren Wie bereits erwähnt, nimmt die Automatisierung von Fahrzeugen immer weiter zu. Es gibt bereits voll automatisierte Autos zu Testzwecken auf den Straßen zu sehen. Laut dem Fraunhofer-Institut für Kognitive Systeme IKS [29] gibt es grundlegend zwei potentielle Einsatzgebiete automatisier- ter Fahrzeuge im Personenverkehr: "Shared autonomy", in Form von öffentlichen automatisierten Verkehrsmitteln wie Taxis oder Busse und "Owned autonomy", welche den Privatgebrauch von autonomen Autos umfasst. Neben dem Personenverkehr ist der Einsatz von automatisierten Sys- temen in unzähligen weiteren Bereichen wie Landwirtschaft, Logistik und Industrie denkbar. Damit könnte der Personalbedarf gesenkt und die Effizienz steigert werden. Entscheidend ist dabei die Verlässlichkeit der Systeme. Viele technische Voraussetzungen müssen ab Automati- onsstufe 3 erfüllt werden. Laut Fraunhofer IKS sind die drei wichtigsten Punkte die maschinelle Wahrnehmung, das Situationsverstehen und die Bahnführung. Die maschinelle Wahrnehmung besteht aus der Perzeption der Fahrzeugumgebung in Echtzeit durch Kameras und Sensoren wie Radar und Lidar und die anschließende Informationsverarbeitung durch Künstliche Intelligenz (KI). Darauf aufbauend wird ein 3D-Modell der Umgebung erstellt, um Voraussagen über die bevorstehende Verkehrssituation treffen zu können (Situationsverstehen). Schließlich führt das autonome Fahrzeug Handlungen, beruhend auf den vorangegangen Berechnungen selbstständig aus (Bahnführung). Die Daten in Echtzeit zu generieren, zu verarbeiten und die Fahrzeugsteue- rung dementsprechend zu realisieren ist jedoch die größte Herausforderung. Das autonome Fahren bietet aber auch zahlreiche Chancen [30]. Da kein Fahrzeugführer mehr nötig sein wird, ist der Insasse mit der Rolle eines passiven Beifahrers vergleichbar. Damit wird auch das sogenannte Valet-Parking möglich sein: Da das Fahrzeug selbstständig zu einem ge- eignetem Parkplatz findet, kann der Nutzer selbst an einer beliebigen Stelle abgesetzt werden. Einen weiteren Vorteil stellen die verkürzten Reaktionszeiten durch den wegfallenden Einfluss von menschlichen Faktoren dar, beispielsweise während dem Brems- und Anfahrvorgang. Dies kann bedeutende Auswirkungen auf die Verkehrssicherheit haben. Auswertungen der Verkehrs- unfallforschung zeigen, dass menschliches Versagen als Hauptunfallursache eingestuft werden kann. Laut statistischem Bundesamt [11] sind im Jahr 2020 in Deutschland 88% der Unfälle auf menschliches Fehlverhalten zurückzuführen. Somit scheint eine deutliche Verbesserung der Verkehrssicherheit durch fahrerlose Fahrzeuge vorstellbar. Voraussetzung dafür ist jedoch eine verlässlich funktionierende Automation. Da jedoch vorerst Level-3-Pkws auf den Straßen unterwegs sein werden, muss der Fahrer jederzeit bereit sein, das Steuer zu übernehmen, sobald die Automatisierung an ihre Grenzen stößt. Damit verändern sich auch die Anforderungen an den Autofahrer grundlegend. Um daraus keine Gefahren entstehen zu lassen, sollten mögliche Risiken bedacht werden [41]. Eine Übergabe der Steuerung während einer autonomen Fahrt kann für den Fahrer eine Herausforderung darstellen. Aufgrund menschlicher Faktoren können Fehlhandlungen nicht ausgeschlossen werden. Das System muss menschliche Stärken und Schwächen berücksichtigen, um eine reibungslose Interaktion zu ermöglichen. Nur so kann das Gesamtsystem Mensch-Maschine sicher und effektiv agieren. Da der Passagier sich mit Rebecca Bussner Bachelorarbeit
6 großer Wahrscheinlichkeit mit fahrfremden Tätigkeiten (NDRTs) beschäftigt und währenddessen von dem Verkehr abgelenkt ist, wird bei einer Übernahmeaufforderung (Take Over Request, kurz: TOR) kein ausreichendes Situationsbewusstsein vorhanden sein. Auch das Thema Vertrauen spielt in diesem Kontext eine wichtige Rolle. Meist liegt dabei das Augenmerk auf Vertrauen aufbauen bzw. Misstrauen verringern. Es ist jedoch zu beachten, dass Misstrauen und Übervertrauen gleichermaßen zu reduzieren sind („Vertrauenskalibrierung“), um die Systemgrenzen zu berücksichtigen [26] [45] [34]. Einem Übermaß an Vertrauen und damit einem Missbrauch der Automation sollte vorgebeugt werden [45]. Oft kennen die Nutzer nicht die Grenzen der Systeme, die sie verwenden und erlauben sich fahrfremden Tätigkeiten nachzugehen, die nicht für das System geeignet sind. Dies zeigten bereits automatisierungsbedingte tödliche Unfälle, ausgelöst durch Missbrauch des Systems (Tesla-Autopilot-Unfälle) [40] [15]. Wie bereits beschrieben, gibt es kollaborative Ansätze, die diese Schwächen mitberücksichtigen und dem Nutzer eine Zusammenarbeit mit dem Fahrzeug anbieten. Solch ein Entwurf wird im folgenden Abschnitt genauer beleuchtet. 2.1.2. Kooperatives autonomes Fahren Es hat sich gezeigt, dass komplette Kontrollübergaben machbar sind, aber aufgrund der menschli- chen Faktoren, wie mangelndes Situationsbewusstsein, sind kooperative Schnittstellen erfolgver- sprechend, um Systemgrenzen zu überwinden, ohne die Kontrolle vollständig zu verlagern [43]. Kooperation wird definiert als das "Zusammenbringen von Handlungen zweier oder mehrerer Personen (Systeme), sodass die Wirkungen der Handlungen zum Nutzen aller dieser Personen (Systeme) führen" [5]. Ein weiterer Begriff, der in diesem Kontext verwendet wird ist "Kolla- boration", welcher von dem lateinischen Wort collaborare abstammt, was so viel bedeutet wie "zusammenarbeiten" [1]. Mit dieser Definition im Hinterkopf wird eine enge Interaktion von Fahrzeug und Fahrer angestrebt, bei der jeder seinen Teil zu jeder Fahrentscheidung beiträgt. Denn trotz bekannter menschlicher Schwächen sollte der Fahrer bis zu einem gewissen Grad die Führung beibehalten. Dem Benutzer mehr Kontrolle zu geben, kann außerdem das Fahrer- lebnis bedeutsam verbessern [44]. Dabei nicht zu vernachlässigen ist vor allem der Erstkontakt mit dem autonomen Fahrzeug, der womöglich Misstrauen und Unerfahrenheit mit sich bringt. Hier ist wichtig, durch eine geeignete Informationsgestaltung den Fahrer an seine neue Rolle heranzuführen. Es wird Situationen geben, in denen ein automatisiertes Fahrzeug die Fahrt nicht ohne Hilfe fortsetzen kann, weil das System nicht entscheiden kann, wie es mit einer Situation umgehen soll [42]. Beispielsweise kann zwar das Fahrzeug einen Fußgänger erkennen, es kann jedoch nicht einschätzen, welche Intention andere Verkehrsteilnehmer verfolgen. Nur der Mensch kann anhand von Mimik und Gestik erkennen, was der Fußgänger als Nächstes gewillt ist zu tun. In solchen Si- tuationen müsste das Fahrzeug zur Sicherheit anhalten. Stattdessen könnte der Fahrer aber dem System helfen, fehlende Informationen zu vervollständigen oder die richtige Entscheidung zu tref- fen, mit der das Auto die Situation selbst bewältigen kann [8]. Walch et al. [41] stellten fest, dass häufig aufkommende Übernahmeaufforderungen für den Fahrer lästig sein können. Stattdessen schlagen sie einen Lösungsansatz vor, welcher den Fahrer lediglich in die Entscheidungsfindung einbezieht. Solche kooperativen Konzepte vermeiden damit eine vollständige Übergabe an den Fahrer. Vorteilhaft ist hier, dass der Fahrer, welcher wahrscheinlich "out of the loop" [22] ist und kein Situationsbewusstsein hat, nicht an der direkten Lenkkontrolle des Fahrzeugs beteiligt ist. Solche Konzepte bieten jedoch auch Herausforderungen, die bedacht werden sollten [42]. Wenn es dem Fahrer an Situationsbewusstsein mangelt, er aber gebeten wird, Manöver zu genehmigen oder zu entscheiden, was das Fahrzeug als Nächstes tun soll, kann es möglicherweise zu kriti- schen Fehlentscheidungen kommen. Folglich sollten solche kooperativen Systeme den Zustand Rebecca Bussner Bachelorarbeit
7 des Fahrers kennen und nur dann eine Zusammenarbeit zulassen, wenn Situationen keine Gefahr darstellen könnten und der Fahrer sicher interagieren kann. Wenn solch ein Zustand gegeben ist, kann der Insasse wie ein zusätzlicher Sensor fungieren, da er möglicherweise einen besseren Überblick und ein besseres Verständnis über das Verkehrsgeschehen hat [8]. Durch die Zusam- menarbeit kann die Fahrt reibungsloser verlaufen und im besten Fall kann sogar Zeit und Sprit gespart werden. Unnötiges Abbremsen und Anfahren kann durch eine korrekte Empfehlung des Fahrzeugführers verhindert werden. Darüber hinaus haben Studien bereits gezeigt, dass derar- tige Ansätze die Freude am Fahren und die Stimulation steigen können [41]. Die kollaborativen Schnittstellen erzielten gute Ergebnisse in Bezug auf das Gefühl von Kompetenz und Kontrolle sowie eine gute User Experience. Zusammengefasst scheint ein kooperatives Anzeige-Konzept eine geeignete Methode zu sein, um mindestens die Übergangsphase zwischen manuellem und vollständig autonomen Fahren zu meistern. Wie Gamification die Kooperation im autonomen Fahrzeug unterstützen kann, wird im folgenden Abschnitt beleuchtet. 2.2. Gamification 2.2.1. Gamification: Begriffsbestimmung “Gamification ist die Übertragung von spieltypischen Elementen und Vorgängen in spielfremde Zusammenhänge mit dem Ziel der Verhaltensänderung und Motivationssteigerung bei Anwende- rinnen und Anwendern” [14]. Deutsche Synonyme sind “Gamifizierung” oder “Spielifizierung”. Bei dem Usern soll dadurch eine Steigerung der Motivation und eine Verhaltensänderung bewirkt werden. So werden dem Anwender eines gamifizierten Produkts zum Beispiel Aufgaben gestellt, welche bewältigt werden sollen. Zum Einsatz kommen dabei spieltypische Elemente wie z.B. de- finierte Ziele und Regeln, Sammeln von Punkten und Preisen oder Vergleiche mit anderen Usern. Diese sollen einen Belohnungseffekt bewirken und dazu animieren, die Aufgaben effektiver zu be- arbeiten. Menschen spielen auch gerne Spiele aufgrund von emotionalen Effekten wie z.B. durch erstrebenswerte Erfahrungen und Engagement [20]. Korn und Rees untersuchten die Wirkung von Gamification unter Verwendung von Biosignalen [32]. In der Gamification-Gruppe zeigte sich eine signifikant erhöhte Arbeitsgeschwindigkeit (p < .006) im Gegensatz zu der Gruppe ohne den Einsatz von Gamification. Die Fehlerzunahme war hingegen nur unwesentlich. Gamification wird zu einem immer weiter verbreiteten Begriff und wurde 2012 sogar in den Gartner-Trendzyklus [16] für neue Technologien aufgenommen. Seitdem wurde Gamification in verschiedenen Bereichen eingesetzt, wie zum Beispiel Schul- und Weiterbildung, Fitness und Gesundheit oder beim Einkauf, zum Beispiel durch Sammeln von Treuepunkten. Gamification birgt zudem das Potenzial, Probleme zu lösen: Durch ihre Anwendung können Aufgaben als "Spaß" statt als "Pflicht", als "Wollen" statt als "Müssen" und als "Spiel" anstelle von "Arbeit" empfunden werden [21]. So wird versucht dem Benutzer ein, vom Psychologen Csikszentmihalyi sogenanntes Flow-Erlebnis (dazu mehr in Kapitel 2.3.1) zu ermöglichen [19]. Ein Zustand, der weder unterfordert noch überfordert und ein verändertes Zeiterleben ermöglicht. Dabei wird sich der spielerische Trieb des Menschen zunutze gemacht. Johan Huizinga bezeichnet diesen Trieb in seinem Buch als “Homo ludens”, welcher bei Tieren und Menschen angeboren sei [27]. Wie dieser Spieltrieb aktiviert werden kann, beschreibt Yu-Kai Chu [18] in seinem Octalysis-Framework mit den acht Core Drives für die Anwendung von Gamification. Dieses Modell wird in Kapitel 2.3.2 nochmal aufgegriffen und genauer beleuchtet. Roman Rackwitz, ausgezeichnet als einer der TOP-10 Gamification Experten der Welt, spricht in einem UX und Usability Podcast der German UPA über Enterprise-Gamification [7]. Er macht deutlich, dass Gamification nicht nur durch Punkte, Badges und Ranglisten definiert ist, denn mit diesen Begriffen wird das Thema normalerweise verbunden. Das Augenmerk sollte stattdessen Rebecca Bussner Bachelorarbeit
8 auf die Motivation gelegt werden. Motivation wird definiert als der „Zustand einer Person, der sie dazu veranlasst, eine bestimmte Handlungsalternative auszuwählen, um ein bestimmtes Ergebnis zu erreichen und der dafür sorgt, dass diese Person ihr Verhalten hinsichtlich Richtung und Intensität beibehält“ [36]. Die Psychologie unterscheidet zwischen intrinsischer und extrinsischer Motivation. Menschen werden extrinsisch motiviert, wenn sie die Aufgabe nicht der Aufgabe willen, sondern wegen der erwarteten Belohnung ausführen. Bei der intrinsischen Motivation kommen die Personen der Aufgabe wegen eines inneren Anreizes nach, um eine Befriedigung zu erfahren. In diesem Fall macht die Aufgabe per se Spaß, ist interessant oder fordert heraus. Rackwitz begründet seine obige Aussage damit, dass es darum geht, die intrinsische Motivation zu wecken [7]. Er macht deutlich, dass im Fall klassischer Punktesysteme die extrinsische Motivation aktiviert wird. Dadurch werden Wenn-Dann-Systeme eingesetzt (Wenn du das erreichst, dann erhältst du diese Preise). Entscheidend ist jedoch, die Aktivität per se attraktiv zu gestalten, ohne sie belohnen zu müssen. Zudem erlebt der Mensch Momente der höchsten Leistungsfähigkeit fast ausschließlich in der intrinsischen Motivation. Bei derartigen Aktivitäten ist der Mensch auf Selbstoptimierung und neuen Herausforderungen aus. Rackwitz erklärt, dass man sich durch das stetige Streben nach Fortschritten positivem Stress aussetzt. In diesem Zustand wird die Effektivität enorm gesteigert. Grundsätzlich ist also das Ziel, die Aktivität bzw. das System an sich ansprechender und interessanter zu gestalten, an- statt sich nur auf Punkte und Badges etc. zu fokussieren. Spieledesignprinzipien können nahezu in allen Bereichen angewendet werden [14]. Zu Beginn fand sich Gamification überwiegend im Entertainmentkontext. Die Gaming-Industrie hat erfolgreich geschafft, in den Menschen Motiva- tion anzuregen [7]. Daher kommt auch eigentlich der Begriff “Gamification”. Nun wird versucht, auch andere Bereiche, wie Spiele oder Hobbys ähnlich attraktiv zu gestalten und die gleichen Trigger zu setzen, um die Motivation hochzuhalten. Das Ausmaß der Auswirkungen ist dabei in der Regel von der Einstellung und der Erfahrung der User abhängig [14]. Dafür sollten gamifi- zierte Elemente kompetent und gezielt eingesetzt werden. Interessant wird aber der Einsatz von Gamification vor allem für Anwendungen über einen größeren Zeitraum, denn die intrinsische Motivation verstärkt sich über die Zeit und den längeren Einsatz bedeutend [7]. 2.2.2. Gamification im automobilen Kontext Spielelemente werden zunehmend auch im Fahrkontext eingesetzt, und das mit Erfolg. Meist zeigt sich ein positiver Effekt in der Motivation, erhöhtem Bewusstsein und gesteigerter Freude [38]. Da Gamification die Motivation erhöhen kann, beeinflusst diese die Entscheidungen des Men- schen darüber, ob er handeln soll oder nicht. Beim Einsatz im Fahrzeug kann Gamification somit die Bereitschaft zur Interaktion steigern. Dies erklärte auch Armin Gräter, Bereichsleiter für funktionale Sicherheit bei der BMW Group, in einem Interview über den Bizplay Gamification Congress [24]. Die Kombination von autonomem Fahren und Gamification kann sogar sicher- heitswirksam sein, da sie die Übernahmebereitschaft des Fahrers am Ende eines automatisierten Fahrtabschnitts deutlich erhöhen kann. Versicherungsunternehmen bieten bereits Apps mit gamifizierten Inhalten für das Autofahren an [39]. Insbesondere als Mittel, um umweltbewusstes Fahren, Sicherheit und Navigation positiv zu beeinflussen. Solche Apps belohnen ein optimales Fahrverhalten mit Punkten und bieten den Usern an, ihre Erfolge mit ihren sozialen Netzwerken zu teilen. Allerdings gibt es kaum Anwen- dungen, die die Chance nutzen, während der Fahrt einzugreifen, um zu einem angepassteren Fahrverhalten beizutragen. Die Ergebnisse werden erst nach der Ankunft präsentiert und haben somit keinen direkten Einfluss auf das Verhalten während der Fahrt. Wie kann also Gamification das Fahrverhalten unmittelbar während der Fahrt beeinflussen? Ergebnisse aus Studien von Steinberger et al. belegen, dass gamifizierte Umgebungen das En- Rebecca Bussner Bachelorarbeit
9
gagement des Fahrers erhöhen [39]. Außerdem zeigte sich in Bezug auf die Verkehrssicherheit,
dass ein Gamification Prototyp erfolgreich sicheres Fahren fördern konnte. Wie wirksam sich
eine spielerische Gestaltung hin zu besserem Fahrverhalten auswirken kann, brachte die Speed
Camera Lottery aus Schweden zum Ausdruck [35] [2]. Volkswagen zeichnete mit dem Wettbe-
werb “The Fun Theory” spielerische Ideen aus, die Menschen dazu bringen würden, Tempolimits
einzuhalten. Erfolgreich war darunter auch die Blitzerlotterie von Kevin Richardson [4]: Unter
Verwendung bestehender Geschwindigkeitserfassungssystemen wurden alle Fahrer, die die Blit-
zerlotterie passierten, erfasst. Fahrer, die sich an das Tempolimit von 30 km/h hielten, nahmen
automatisch an der Lotterie teil. Hier konnten sie Geldpreise erhalten, die von den Fahrern fi-
nanziert wurden, welche mit Geldbußen für Geschwindigkeitsüberschreitungen bestraft wurden.
Die Durchschnittsgeschwindigkeit betrug vor dem Aufbau der Lotterie 32 km/h, während dem
Testzeitraum betrug sie nur noch 25 km/h. Damit wurde also eine Verringerung der Durch-
schnitsgeschwindigkeit um 22% erreicht. Die Verkehrsteilnehmer waren durch die Chance auf
einen Gewinn vielmehr motiviert, das Tempolimit einzuhalten. Es scheint also durchaus mög-
lich zu sein, erwünschtes Fahrverhalten zu fördern, indem man gamifizierte Elemente geschickt
einsetzt.
2.3. Modelle für das Verstehen und die Anwendung von Gamification
2.3.1. Flow Theorie nach Mihály Csíkszentmihályi
Wie bereits in Kapitel 2.2.1. beschrieben, gibt es Tätigkeiten, die den Menschen unterfordern
und langweilen, da sie nur wenig abverlangen und zu leicht für die eigenen Fähigkeiten sind. Auf
der anderen Seite gibt es Aktivitäten, die einen hohen Anspruch stellen. Wenn es zu einer Über-
forderung kommt, wird Stress oder sogar Angst ausgelöst. “Unter Flow-Erleben wird dabei das
Abbildung 2: Der Flow Zustand: Die Bedingung ist weder unterfordert noch überfordert zu sein.
Dies führt zu einem sogenannten Tätigkeitsrausch [37].
tiefe, (selbst-)reflexionsfreie Aufgehen in einer Tätigkeit, bei hohem Engagement, hoher Konzen-
tration und starkem Gefühl der Kontrolle über den Tätigkeitsverlauf verstanden” [31]. Im Flow
Zustand ist man weder über- noch unterfordert [19]. Es kommt zu einem dafür typischen verän-
derten Zeiterleben, einer Art Trance. Die Zeit scheint dabei still zu stehen (Tätigkeitsdauer wird
unterschätzt). Das Erlebnis kann nur bei einer aktiven Tätigkeit auftreten, in der die eigenen
Fähigkeiten gefordert werden. Abbildung 2 veranschaulicht diesen Flow-Zustand. Eine zentrale
Bedingung ist dabei das dynamische Anpassen des Systems an die individuellen Fähigkeiten der
User, um langfristig und erfolgreich funktionieren zu können [37]. Es werden Schwierigkeitsgrade
und optionales Überspringen von z.B. Tutorials empfohlen. Wichtig bei der Wahl der Spielele-
mente ist dabei die Anpassung an das Fähigkeitsniveau der jeweiligen Zielgruppe. Im Fahrkontext
bedeutet das, dass ein adaptives Anzeige-Konzept von Vorteil wäre, wenn ein Flow-Zustand für
den Fahrer erreicht werden soll.
Rebecca Bussner Bachelorarbeit10
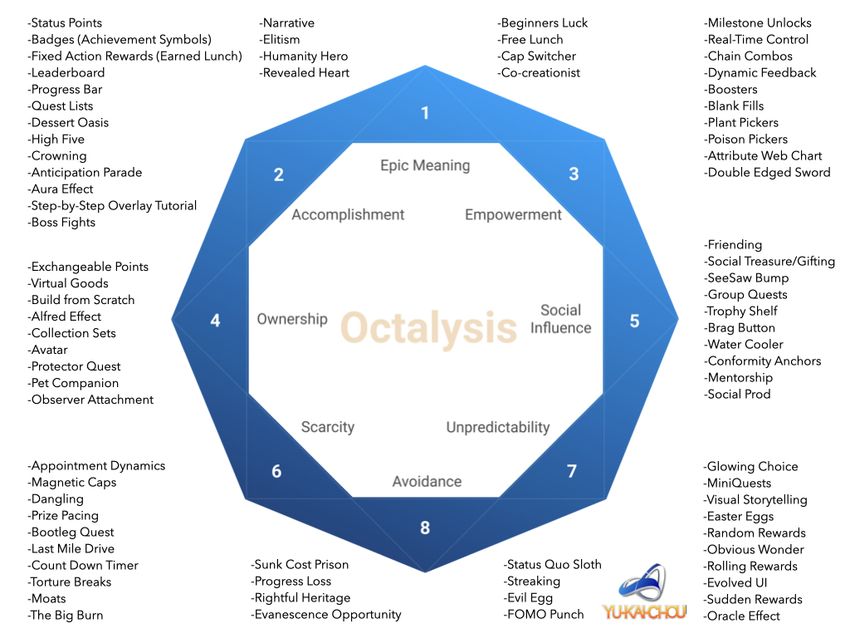
2.3.2. Octalysis-Framework von Yu-Kai Chu
Das bereits erwähnte menschenzentrierte Gamification-Design-Framework wurde vom Gamification-
Experten Yu-kai Chou empirisch entwickelt [18]. Eine Übersicht ist unter Abbildung 3 zu finden.
Yu-Kai Chu definiert acht sogenannte Core Drives, die Gamification definieren können und den
Spieltrieb aktivieren sollen. Dadurch richtet sich der Benutzer an einem Ziel aus und ist folglich
motivierter und ausdauernder. Folgende Core Drives werden aufgeführt:
1 Bedeutung und Sinn: In vielen Anwendungen spielt man den Helden, der die Welt retten
soll. In dem Spiel steht man vor einer besonderen Herausforderung und verfolgt damit ein
höheres, zu erreichendes Ziel.
2 Entwicklung und Leistung: Menschen bereitet es Freude, sich selbst immer weiter zu
verbessern und die eigenen Fähigkeiten erfolgreich einzusetzen. Um die Weiterentwicklung
aufzuzeigen, sind Feedback-Schleifen geeignet.
3 Ermächtigung: Selbstbestimmtheit im Spiel ist ein ausschlaggebender Faktor. User sollen
das Gefühl haben, einflussreiche Entscheidungen treffen zu können, um den Verlauf des
Spiels zu bestimmen.
4 Eigentum: Spieler sollten die Möglichkeit haben, über eigene Elemente ihrer Persönlichkeit
Ausdruck zu bringen. Über die Elemente kann der User selbst bestimmen.
5 Verbundenheit: User haben Spaß daran, im Wettbewerb oder auch kooperativ zusammen
zu spielen. Vor allem genießen sie eigene Erfolge, die für alle sichtbar sind.
6 Knappheit: Das Verknappungsprinzip funktioniert auch im Gamificationkontext. Beson-
dere und seltene Elemente verstärken den Anreiz, es zu erreichen.
7 Unberechenbarkeit: Durch unbekannte Spielverläufe und unerwartete Wendungen bleibt
es spannend und reizt den Spieltrieb.
8 Vermeidung: Spieler möchten unerwünschte Ereignisse wie Verlust oder Tod vermeiden.
Negatives kann ebenso Anreiz schaffen.
Innerhalb des Modells bilden die Core Drives auf der linken Seite (linke Gehirnhälfte), die mit
Logik, Berechnungen und Besitz zu tun haben die extrinsischen Motivatoren. Auf der rechten
Seite (rechte Gehirnhälfte) sind die Core Drives abgebildet, die mit Kreativität, Selbstausdruck
und sozialen Aspekten zu tun haben - die intrinsischen Motivatoren. Hierbei sind, wie bereits
festgestellt, die intrinsischen Motivatoren um einiges nachhaltiger und vielversprechender. Das
Modell wird zudem in obere und untere Core Drives unterteilt. Die oberen Core Drives gelten als
sehr positive Motivatoren, während die unteren Core Drives als negative Motivatoren betrachtet
werden. Methoden, welche die oberen Punkte nutzen, werden "White Hat Gamification" genannt
und jene, die die unteren verwenden "Black Hat Gamification". Diese Core Drives bieten Ori-
entierung und können bei der Konzeptentwicklung hilfreich sein. Optimal ist es, wenn alle Core
Drive Punkte bei einem Produkt berücksichtigt werden. Es ist jedoch nicht zwingend nötig, dass
ein gamifiziertes Produkt alle Core Drives bedient, vorausgesetzt, es funktioniert auch mit den
wenigen implementierten Punkten.
Rebecca Bussner Bachelorarbeit11
Abbildung 3: Octalysis-Framework: Übersicht der 8 Core Drives, welche bei der Konzeptentwick-
lung Orientierung bieten können [18].
Rebecca Bussner Bachelorarbeit12
3. Methodisches Vorgehen
In diesem Kapitel wird zunächst die Gestaltung der Konzepte erläutert. Anschließend wird das
Versuchsdesign (Kap. 3.2) beschrieben, gefolgt von der Vorstellung des Verfahrens und der Va-
riablen (Kap. 3.3) sowie der Versuchsdurchführung (Kap. 3.4). Zuletzt erfolgt die Beschreibung
der Stichprobe (Kap. 3.5).
3.1. Konzipierung des Baseline- und Gamification-Konzepts
Im Folgenden werden die Konzipierung und die grundlegenden Eigenschaften des Baseline- und
des Gamification-Konzepts beschrieben. In Anhang A.2 ist eine Überischt des Screen-Designs
abgebildet.
Die Gestaltung der Screens erfolgte mit dem Prototyping-Tool Figma. Hiermit konnten auch
interessante Animationen, wie z.B. Ladebalken oder bewegte Badges erstellt werden. Die ferti-
gen Konzepte wurden auf dem Head-up-Display (HUD) des Fahrzeug-Mockups abgebildet. Das
Baseline-Konzept bot, wie in Abbildung 4 zu sehen, lediglich zwei Auswahlmöglichkeiten: Weiter-
fahren oder Abbremsen. Diese konnten anhand zweier Knöpfe am Lenkrad ausgewählt werden.
Der linke Button stand für "abbremsen", der rechte Button für "weiterfahren". Jede Interakti-
onsmöglichkeit wurde dafür mit einem Signalton eröffnet.
Abbildung 4: Screen-Design des Baseline-Konzepts.
Das Gamification-Konzept (Abbildung 5) hatte eine ähnliche Funktionsweise wie das Baseline
Konzept, nur wurde die Anzeige durch spielerische Inhalte angereichert. Jede Interaktionsmög-
lichkeit wurde mit einem Ladebalken begeleitet, welcher die verbleibende Zeit für die Interak-
tion visualisierte. Zusätzlich gab es ein Punktesystem. Wenn richtig interagiert wurde, gab es
Plus-Punkte. Je schneller die Probanden eine Auswahl trafen, desto höher die Punktzahl. Bei
einer falschen Auswahl gab es Punktabzug und bei ausbleibender Interaktion keine Punkte. Zum
Schluss wurde dem Teilnehmer die Gesamt-Punktzahl präsentiert und die Zeit, die durch die
Interaktionen gespart werden konnte.
Eine falsche Interaktion stellte beispielsweise folgendes Szenario dar: Der Proband wählte "wei-
terfahren" aus doch der Fußgänger trat auf die Straße. Tatsächlich hätte sich der Teilnehmer in
solchen Fällen kurzfristig umentscheiden können. Das wurde den Probanden vorab genauso deut-
lich gemacht, wie die Tatsache, dass sie nicht zwingend interagieren müssen. Das Fahrzeug würde
auch so sicher an sein Ziel gelangen, da es in kritischen Situationen und ohne die Hilfe des Fahrers
stehen bleiben würde. Durch Interaktion des Fahrers kann somit Zeit und Sprit gespart werden,
da unnötiges Abbremsen und Anfahren vermieden wird.
Rebecca Bussner Bachelorarbeit13
Abbildung 5: Screen-Design des Gamification-Konzepts.
Bei der Betrachtung des Gamification-Konzepts nach dem Octalysis-Framework zeigt sich, wie
in Abbildung 6 dargestellt, folgende Gewichtung der 8 Core Drives [17] [18]. Die Verteilung der
White Hat und Black Hat Core Drives ist relativ ausgewogen. Außerdem scheint eine relativ
gute Balance zwischen den Core Drives der linken und der rechten Gehirnhälfte zu bestehen,
was bedeutet, dass wahrscheinlich ein angemessenes Gleichgewicht zwischen intrinsischer und
extrinsischer Motivation herrscht. Die Gewichtung der einzelnen Punkte sind durch die mehr
oder weniger ausgeprägten Ausschläge verdeutlicht. Hinsichtlich des ersten Core Drives "Bedeu-
Abbildung 6: Betrachtung des Gamification-Konzepts nach dem Octalysis-Framework [17] [18].
tung und Sinn" können die User im Gamification-Konzept durch ihre Interaktionen Zeit und
Sprit sparen. Dadurch wird der Fahrer herausgefordert, dieses für ihn sinnvolle und bedeutsa-
me Ziel zu erreichen. Der Punkt "Entwicklung und Leistung" kommt durch das Punktesystem
zum Ausdruck. Mit dem Sammeln von Punkten kann der Fortschritt anhand der wachsenden
Punktezahl verfolgt werden. Der User kann sich durch seine Fähigkeiten und Strategien immer
weiter verbessern und dadurch noch höhere Scores erreichen. Die Weiterentwicklung des Fahrers
zeigt sich auch durch die fortschreitende Optimierung der ersparten Zeit. Auf der anderen Seite
hat der User auch Angst, seine Punkte durch falsche oder verspätete Interaktionen zu verlieren.
Rebecca Bussner Bachelorarbeit14
Er möchte Zeitverlust und Punkteabzug möglichst umgehen, was den Core Drive "Vermeidung"
darstellt, ein negativer Reiz, der auch motivierend wirken kann. Der Punkt "Ermächtigung"
zeigt sich durch den Einfluss, den der Fahrer mit seinen Interaktionen auf das Verhalten des
Fahrzeugs hat. Dadurch bekommt der User das Gefühl, einflussreiche Entscheidungen treffen zu
können, um den Verlauf der Fahrt zu bestimmen. Andererseits kommt es durch die Fahrt auf
einer realen, belebten Straße automatisch zu einem unvorhersehbaren Ablauf. Damit wird der
Core Drive "Unberechenbarkeit" deutlich. Die unbekannten Verläufe und unerwarteten Situatio-
nen machen es spannend und reizen den Spieltrieb. Die Punkte "Eigentum", "Verbundenheit"
und "Knappheit" sind kaum ausgeprägt.
Für diese Studie haben wir uns entschieden, das Konzept recht simpel zu halten, deshalb
können nicht alle Core Drives mit eingebracht werden. In weiterführenden Arbeiten wäre eine
umfassendere Umsetzung denkbar. Andererseits muss ein gutes Gamification-System nicht alle
Core Drives beinhalten [18]. Es muss lediglich mit denjenigen, die es implementiert, wirklich gut
funktionieren. Dementsprechend können noch keine zuverlässigen Aussagen über die Qualität
des Konzepts getroffen werden. Das Framework dient lediglich dem tieferen Verständnis für das
eigene Produkt, um darauf hin mögliche Anpassungen vornehmen zu können. Ein adaptives
Anzeige-Konzept wäre hier auch zu komplex, weswegen die Flow-Theorie nach Csíkszentmihályi
[19] nicht wirksam angewandt werden kann.
3.2. Versuchsdesign
Um die Hypothesen zu überprüfen, wurde ein Versuchsplan erstellt, welcher in Tabelle 2 veran-
schaulicht wird. Der Faktor Gamification wurde durch die UV A dargestellt. Die UV B repräsen-
tiert die Situationen, in denen die Probanden in der Fahrsimulation zur Interaktion aufgefordert
werden, da es zu einer Interaktion mit einem Fußgänger kommt.
Tabelle 2: Versuchsdesign (R: randomisiert, P: Permutiert, F: Zeitpunkte der Fußgängerhand-
lungen).
Der vorliegenden Studie lag ein Within-Subjects Study Design zugrunde. Die Probanden wur-
den mit einem UI-Konzept begleitet, angezeigt auf dem HUD. Dabei wurde zwischen einem
Baseline-Konzept und einem Gamification-Konzept (Anreicherung mit spielifizierten Inhalten)
unterschieden. Die Reihenfolge der Konzepte wurde randomisiert. Ein Teil der Probanden bekam
zuerst das Baseline-Konzept zu sehen und darauf folgte das gamifizierte Konzept. Der anderen
Gruppe wurden die Konzepte in umgekehrter Reihenfolge präsentiert. Beiden Durchläufen ging
immer eine Probefahrt mit dem Baseline-Konzept voraus, um die Probanden an das System her-
Rebecca Bussner Bachelorarbeit15
anzuführen und Verständnisprobleme für die folgenden Fahrten zu vermeiden. Die UV B wurde
wie folgt realisiert: In der Simulation fuhren die Probanden eine Stadtstraße entlang. In regelmä-
ßigen Abständen passierte das Auto einen Fußgänger am Bürgersteig, während die Teilnehmer
zur Interaktion aufgefordert wurden. Der Fußgänger blieb entweder auf dem Bürgersteig ste-
hen oder betrat die Fahrbahn. Dabei mussten die Teilnehmer (TN) die Intention des Passanten
einschätzen und dementsprechend reagieren. Es konnte zu folgenden Szenarien kommen:
• Richtige Interaktion führt zu langsamem Abbremsen oder Weiterfahrt.
• Falsche Interaktion führt zu Notbremsung oder unnötige Bremsung.
• Ausbleibende Interaktion führt zu unnötiger Bremsung.
Eine Übersicht des genauen Ablaufs ist in Tabelle 3 dargestellt. Um einen Lerneffekt zu vermei-
den, wurden die dargebotenen Situationen permutiert. Die jeweilige Handlungsanzahl ist dabei
gleich geblieben. Insgesamt gab es 4 Interaktionen pro Fahrt mit dem Fußgänger. Zweimal trat
die Person vor das Auto und zweimal verblieb diese auf dem Bürgersteig. Da die Handlungen
zufällig geschahen, konnten die Probanden keine Schlüsse aus der letzten Fahrt ziehen und damit
die Daten nicht beeinflussen.
Tabelle 3: Übersicht des Ablaufs der dargebotenen Szenarien in der Simulation.
Rebecca Bussner Bachelorarbeit16
3.3. Verfahren und Variablen
Im Folgenden werden das Verfahren und die Erhebungsinstrumente vorgestellt. Die Studie wurde
in einem Fahrzeug-Mockup der Technischen Hochschule Ingolstadt im Rahmen der Landesgar-
tenschau (LGS) durchgeführt. Erfahrungsgemäß sind Besucher auf derartigen Veranstaltungen
weniger bereit, an intensiven Versuchen teilzunehmen. Dementsprechend nahm ein Durchgang
durchschnittlich nur 20 Minuten in Anspruch. Die Zuweisung der Probanden geschah zufällig,
je nachdem welcher LGS-Besucher gerade Interesse zeigte. Als Erhebungsinstrumente wurden
ein Rekrutierungsfragebogen und standardisierte Fragebögen, welche durch qualitative Fragen
in einem Interview ergänzt wurden, gewählt. Die Fragebögen wurden über ein Tablet mit dem
Online-Tool Limesurvey ausgefüllt und dokumentiert. Der vollständige Fragebogen ist im Anhang
A.3 abgebildet. Die zeitliche Einordnung der verwendeten Materialien ist in Tabelle 4 dargestellt.
Die Erhebungsinstrumente werden im Folgenden beschrieben.
Rekrutierungsfragebogen Um die Erfahrung der TN mit automatisierten Assistenzsystemen
zu erfassen, wurde vorab ein demografischer Fragebogen ausgefüllt. Bei diesem wurde das Alter
und das Geschlecht erfasst und gefragt, ob der TN bereits Berührungspunkte mit automatisierten
Assistenzsystemen hatte. Zudem schätzten die TN ein, ob sie sich in Zukunft das Fahren in einem
autonomen Fahrzeug vorstellen könnten.
Standardisierte Fragebögen Die Bewertung des Nutzungserlebnisses erfolgte mithilfe des
User Experience Questionnaire (UEQ), des Acceptance Scale und des System Usability Scale
(SUS). Die Eingabe und Verwaltung der Daten erfolge mittels Limesurvey auf einem Tablet.
Interview Das Interview wurde zum Ende der Durchführung eingesetzt, um weitere qualitative
Informationen und Meinungen zu den Konzepten einzuholen. Das abschließende Fazit wurde
anhand von 4 Fragen erfasst (z.B. „Denken Sie, das Konzept könnte Sie bei einer automatisierten
Fahrt unterstützen bzw. würde es Sie zur Interaktion motivieren?“). Abschließend durften die
TN Anmerkungen machen und Erkenntnisse mitteilen. Es wurden unter anderem Stärken und
Schwächen diskutiert und die TN wurden gefragt, welches Konzept besser gefallen hat. Die
Antworten der Befragung, festgehalten in einer Excel-Tabelle sind im Anhang A.4 zu finden.
Tabelle 4: Übersicht des Studienablaufs und der bearbeiteten Materialien.
Rebecca Bussner Bachelorarbeit17
3.4. Versuchsdurchführung
In Tabelle 4 ist eine Übersicht des Studienablaufs abgebildet.
Vor der Durchführung Die TN wurden zunächst begrüßt und der Ablauf der Studie wurde
vorgestellt (Abbildung 7). Anschließend wurden die TN über ihre Rechte und die Verwendung
ihrer Daten aufgeklärt, woraufhin sie in die Erhebung und Weiterverarbeitung der Daten einwil-
ligten. Danach sollten die TN eine Probefahrt zum Kennenlernen des System machen, bevor wir
anschließend die Durchführung starteten. Dabei konnte der Versuchsleiter (VL) Genaueres zur
Anzeige und zu den Funktionen beschreiben und noch einige Unklarheiten beseitigen.
Abbildung 7: Einführung in die Studie und Fahrt in dem Fahrzeug-Mockups, begleitet von den
Konzepten auf dem HUD.
Die Durchführung Daraufhin folgte die erste Fahrt mit einem der Konzepte. Anschließend
wurden die TN gebeten, den Fragebogen zu den demografischen Angaben sowie zu ihren bishe-
rigen Erfahrungen bezüglich automatisierten Assistenzfunktionen und zur Einstellung bezüglich
automatisierten Fahrzeugen auszufüllen. Dann folgten die Fragebögen UEQ, Acceptance Scale
und System Usability Scale. Die TN konnten jederzeit Fragen stellen. Eine letzte Fahrt folgte
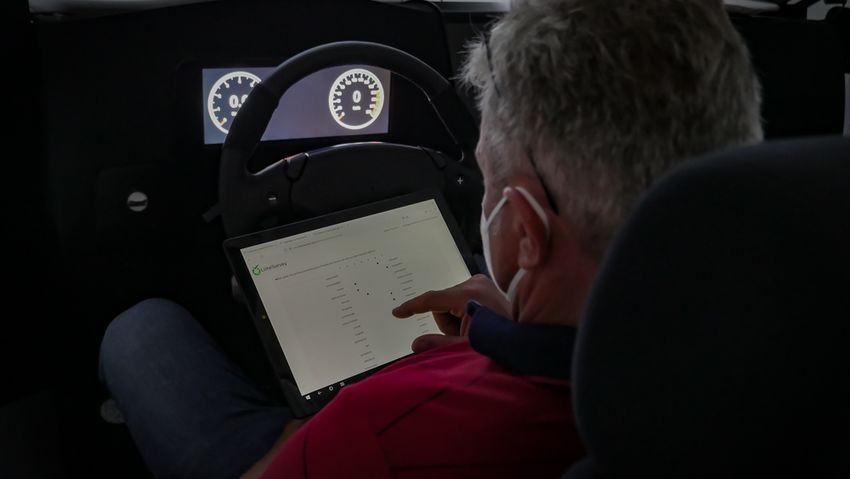
mit dem weiteren Konzept und auch hier wurden die Fragebögen vorgelegt. In Abbildung 8 ist
das Gamification-Konzept auf dem HUD zu sehen und ein Proband während dem Ausfüllen des
Fragebogens.
Abbildung 8: Fahrt mit dem Gamification-Konzept und anschließende Bewertung der Konzepte.
Nach der Durchführung Nachdem die TN beide Konzept gesehen hatten, erfolgte die münd-
liche Befragung zur Bewertung der Anzeigekonzepte. Dabei notierte der VL die Antworten der
TN. Danach war die Erhebung beendet und den TN wurde für ihre Teilnahme gedankt. Der
gesamte Ablauf mit exaktem Wortlaut ist in Anhang A.1 zu finden.
Rebecca Bussner Bachelorarbeit18
3.5. Stichprobe
An der Studie nahmen insgesamt N =35 Personen teil, darunter n=13 Frauen und n=22 Männer.
Vor der Durchführung wurden bereits Kriterien festgelegt, die die Teilnehmer erfüllen mussten,
um in die Studie inkludiert zu werden. So mussten die TN bestätigen, dass sie bereits einen
Führerschein besaßen oder die Fahrschule besuchten. Demnach konnten Personen ab dem Alter
von 16 Jahren teilnehmen. Zudem wurden nur diejenigen Datensätze beachtet, die vollständig
ausgefüllt wurden. Eine Rekrutierung über die Hochschule war nicht nötig, da das Fahrzeug-
Mockup auf der LGS Ingolstadt platziert wurde und daher viele Besucher spontan bereit waren,
an der Studie teilzunehmen. Ganz im Gegensatz zu einer Durchführung an der Hochschule, bei
der fast ausschließlich Studenten für eine Teilnahme zur Verfügung stehen, befanden sich alle
möglichen Altersgruppen auf dem Gelände. Aus diesem Grund war eine weitaus repräsentati-
vere Datenerhebung möglich. Der Erhebungszeitraum erstreckte sich vom 22.07.2021 bis zum
25.07.2021. Die Studiendauer betrug für jeden TN etwa 15 bis 20 Minuten. Die TN erhielten
keine Aufwandsentschädigung. Eine Stichprobenbeschreibung ist in Tabelle 5 dargestellt.
Tabelle 5: Stichprobenbeschreibung bezüglich der Alters- und Geschlechterverteilung.
Rebecca Bussner BachelorarbeitSie können auch lesen