DE ZZ1103 Inbetriebnahmeanleitung - O3M
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Inbetriebnahmeanleitung
DE
O3M
Bereichsüberwachung
ZZ1103
04 / 2020
80286758 / 00
O3M Bereichsüberwachung
Inhalt
1 Vorbemerkung������������������������������������������������������������������������������������������������������������������������������������������3
1.1 Verwendete Symbole������������������������������������������������������������������������������������������������������������������������3
1.2 Verwendete Warnhinweise ��������������������������������������������������������������������������������������������������������������3
1.3 Weitere Dokumente��������������������������������������������������������������������������������������������������������������������������3
2 Sicherheitshinweise����������������������������������������������������������������������������������������������������������������������������������4
2.1 Sicherheitshinweis Beleuchtungseinheit������������������������������������������������������������������������������������������4
2.2 Sicherheitshinweis E2M-Monitor������������������������������������������������������������������������������������������������������5
3 Bestimmungsgemäße Verwendung����������������������������������������������������������������������������������������������������������5
4 Lieferumfang��������������������������������������������������������������������������������������������������������������������������������������������6
5 Schnelleinstieg�����������������������������������������������������������������������������������������������������������������������������������������8
5.1 Verbindungsübersicht ����������������������������������������������������������������������������������������������������������������������9
5.2 Montage������������������������������������������������������������������������������������������������������������������������������������������ 11
5.3 Bereichsüberwachung einstellen����������������������������������������������������������������������������������������������������13
6 Funktion��������������������������������������������������������������������������������������������������������������������������������������������������16
6.1 Mobile 3D Smart Sensor����������������������������������������������������������������������������������������������������������������16
6.2 CAN-Bus ����������������������������������������������������������������������������������������������������������������������������������������16
6.3 Applikationspaket����������������������������������������������������������������������������������������������������������������������������16
7 Montage��������������������������������������������������������������������������������������������������������������������������������������������������17
7.1 BasicController montieren��������������������������������������������������������������������������������������������������������������17
7.2 3D-Sensor und Beleuchtungseinheit montieren ����������������������������������������������������������������������������17
7.3 Neigungswinkel und Höhe des 3D-Sensors messen ��������������������������������������������������������������������19
7.4 Beispiel für Montage des 3D-Sensors am Fahrzeugheck��������������������������������������������������������������20
8 Elektrischer Anschluss����������������������������������������������������������������������������������������������������������������������������21
8.1 Anschlussbelegung 3D-Sensor������������������������������������������������������������������������������������������������������23
8.2 Anschlussbelegung Beleuchtungseinheit ��������������������������������������������������������������������������������������23
8.3 Anschlussbelegung BasicController ����������������������������������������������������������������������������������������������24
8.4 Anschlussbelegung E2M-Monitor ��������������������������������������������������������������������������������������������������25
8.5 BasicController mit BasicDisplay verbinden ����������������������������������������������������������������������������������25
8.6 3D-Sensor und Beleuchtungseinheit verbinden ����������������������������������������������������������������������������27
8.7 E2M-Monitor verbinden������������������������������������������������������������������������������������������������������������������28
9 Anzeige- und Bedienelemente����������������������������������������������������������������������������������������������������������������29
9.1 BasicDisplay ����������������������������������������������������������������������������������������������������������������������������������29
9.2 Akustischer Signalgeber ����������������������������������������������������������������������������������������������������������������29
10 Inbetriebnahme������������������������������������������������������������������������������������������������������������������������������������30
10.1 Bereichsüberwachung einstellen��������������������������������������������������������������������������������������������������30
10.1.1 Startbildschirm und Betriebszustand������������������������������������������������������������������������������������31
10.1.2 Experteneinstellungen����������������������������������������������������������������������������������������������������������32
10.1.3 Konfigurationsassistent��������������������������������������������������������������������������������������������������������36
10.1.4 Bereichsdefinition - Standardeinstellungen��������������������������������������������������������������������������39
10.1.5 Bereichsdefinition - Experteneinstellungen��������������������������������������������������������������������������40
10.2 Monitoring-Modus������������������������������������������������������������������������������������������������������������������������42
11 Fehlerbehebung������������������������������������������������������������������������������������������������������������������������������������43
11.1 Status-LED ����������������������������������������������������������������������������������������������������������������������������������43
11.2 Betriebszustände��������������������������������������������������������������������������������������������������������������������������44
11.3 Statusanzeigen im Monitoring-Modus������������������������������������������������������������������������������������������44
11.4 Fehlercodes 3D-Sensor����������������������������������������������������������������������������������������������������������������46
11.5 Fehlercodes BasicController��������������������������������������������������������������������������������������������������������47
12 Begriffe und Abkürzungen��������������������������������������������������������������������������������������������������������������������48
13 Häufig gestellte Fragen������������������������������������������������������������������������������������������������������������������������48
14 Zubehör������������������������������������������������������������������������������������������������������������������������������������������������51
2
O3M Bereichsüberwachung
1 Vorbemerkung
Die einzelnen Bedienungsanleitungen der Geräte, technische Daten, Zulassungen, Zubehör und weitere
Informationen → www.ifm.com.
Der QR-Code auf der Geräteverpackung enthält einen Link auf die Produktseite des Gerätes.
1.1 Verwendete Symbole DE
► Handlungsanweisung
> Reaktion, Ergebnis
[…] Bezeichnung von Tasten, Schaltflächen oder Anzeigen
→ Querverweis
Wichtiger Hinweis
Fehlfunktionen oder Störungen sind bei Nichtbeachtung möglich.
Information
Ergänzender Hinweis.
1.2 Verwendete Warnhinweise
WARNUNG
Warnung vor schweren Personenschäden.
Tod oder schwere irreversible Verletzungen sind möglich.
VORSICHT
Warnung vor Personenschäden.
Leichte reversible Verletzungen sind möglich.
ACHTUNG
Warnung vor Sachschäden
1.3 Weitere Dokumente
●● Kurzanleitung
●● Bedienungsanleitung
●● Softwarehandbuch
Die Dokumente können heruntergeladen werden:
www.ifm.com
3
O3M Bereichsüberwachung
2 Sicherheitshinweise
●● Die beschriebenen Geräte werden als Teilkomponente in einem System verbaut.
–– Die Sicherheit dieses Systems liegt in der Verantwortung des Betreibers.
–– Der Systemhersteller ist verpflichtet, eine Risikobeurteilung durchzuführen und daraus eine
Dokumentation nach den gesetzlichen und normativen Anforderungen für den Betreiber und den
Benutzer des Systems zu erstellen und beizulegen. Diese muss alle erforderlichen Informationen
und Sicherheitshinweise für den Betreiber, Benutzer und ggf. vom Systemhersteller autorisiertes
Servicepersonal beinhalten.
–– Für die ordnungsgemäße Funktion der Anwendungsprogramme ist der Systemhersteller selbst
verantwortlich.
●● Dieses Dokument vor Inbetriebnahme der Geräte lesen und während der Einsatzdauer aufbewahren.
●● Die Geräte müssen sich uneingeschränkt für die betreffenden Applikationen und
Umgebungsbedingungen eignen.
●● Die Geräte bestimmungsgemäß verwenden (→ "3 Bestimmungsgemäße Verwendung").
●● Die Missachtung von Anwendungshinweisen oder technischen Angaben kann zu Sach- und
Personenschäden führen.
●● Für Folgen durch Eingriffe in die Geräte oder Fehlgebrauch durch den Betreiber übernimmt der
Hersteller keine Haftung und keine Gewährleistung.
●● Montage, elektrischer Anschluss, Inbetriebnahme, Programmierung, Konfiguration, Bedienung und
Wartung der Geräte darf nur für die jeweilige Tätigkeit ausgebildetes, autorisiertes Fachpersonal
durchführen.
●● Geräte und Kabel wirksam vor Beschädigung schützen.
●● Aufgrund der Anforderungen für elektromagnetische Störaussendungen sind die Geräte für den
Einsatz in Industrieumgebungen bestimmt. Für den Einsatz in Wohnbereichen sind die Geräte nicht
geeignet.
WARNUNG
Wird das Set für den Personenschutz verwendet, sind Tod oder schwere irreversible
Verletzungen möglich.
Das Set ist ein Assistenzsystem und wirkt lediglich unterstützend beim Erkennen von
Objekten. Der Betreiber des Systems trägt die volle Verantwortung für Personen innerhalb der
Bereichsüberwachung.
►► Das Set nur zur Unterstützung als Assistenzsystem verwenden.
2.1 Sicherheitshinweis Beleuchtungseinheit
VORSICHT
Unsichtbares Infrarotlicht
Die Beleuchtungseinheit strahlt für das menschliche Auge unsichtbares Infrarotlicht der
Risikogruppe 1 aus (IEC 62471:2006).
Das Infrarotlicht kann durch sehr langes Betrachten die Netzhaut des Auges beschädigen.
►► Beleuchtungseinheit mit den beschriebenen Einrichtungen und Einstellungen verwenden.
►► Blick in den Infrarotstrahl vermeiden.
4
O3M Bereichsüberwachung
ACHTUNG
Dieses Produkt strahlt Infrarotlicht aus.
Klassifizierung nach IEC 62471:2006 DE
Risikogruppe 1
1. Abb.: Sicherheitshinweis der Beleuchtungseinheit
2.2 Sicherheitshinweis E2M-Monitor
ACHTUNG
Das Berühren des Displays kann permanente Pixelfehler verursachen.
►► Nicht das Display des Gerätes berühren.
3 Bestimmungsgemäße Verwendung
Das Set ZZ1103 O3M Bereichsüberwachung ist ein Assistenzsystem zur Bereichsüberwachung und zur
Kollisionswarnung. Im Set enthalten sind alle für den Betrieb notwendigen Geräte und Kabel. Die Geräte
sind vorprogrammiert und können direkt nach der Montage und dem elektrischen Anschluss in Betrieb
genommen werden.
Das Set ZZ1103 kann im Außen- und Innenbereich verwendet werden. Die Hauptanwendung ist die
aktive oder statische Bereichsüberwachung von großen Fahrzeugen und Arbeitsmaschinen. Erkannte
Objekte im Gefahrenbereich werden dem Fahrer optisch und akustisch signalisiert. Die folgenden
Bereiche eines Fahrzeugs können überwacht werden:
●● Front
●● Rückseite
●● Seiten
Das Set ZZ1103 O3M Bereichsüberwachung befreit den Fahrer nicht von seiner Verantwortung für einen
sicheren Betrieb des Fahrzeugs.
Weitere Informationen: www.ifm.com und mobilevision@ifm.com
5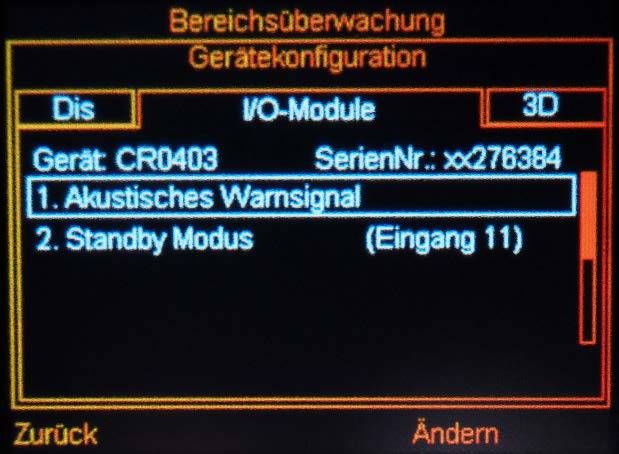
O3M Bereichsüberwachung
4 Lieferumfang
Anzahl Artikelnummer Beschreibung Abbildung
1 O3M261 Mobiler 3D-Sensor mit integriertem 2D/3D-Overlay
(vorprogrammiert)
Öffnungswinkel 3D: 95°x32°
1 O3M960 IR-Beleuchtungseinheit für O3M261
2 E3M102 Montagehalterung für 3D-Sensor und
Beleuchtungseinheit, V2A schwarz
1 E3M120 MCI-Verbindungskabel für 3D-Sensor und
Beleuchtungseinheit
1 E3M133 Anschlusskabel für Beleuchtungseinheit, Länge 10 m
1 E3M171 CAN-Adapterkabel mit integriertem CAN-
Abschlusswiderstand (120 Ohm) zur Verbindung und
Spannungsversorgung von 3D-Sensor, CR0403 und
CR0451, 10 m
1 E3M172 Adapterkabel zum Anschluss des akustischen
Signalgebers und Verwenden der Ausgangskanäle.
Die Verpackung enthält zusätzliche Anschlusskabel für
weitere Ausgangskanäle.
1 80281057 Akustischer Signalgeber zum Anschluss an CR0403
6
O3M Bereichsüberwachung
Anzahl Artikelnummer Beschreibung Abbildung
1 CR0403 BasicController, programmierbare Steuerung
mit multifunktionalen Ein- und Ausgangskanälen
(vorprogrammiert)
DE
1 EC0402 Abdeckung für BasicController zum Schutz vor Nässe
und Staub (IP54)
1 CR0451 BasicDisplay, programmierbares Grafikdisplay mit
CAN-Anschluss (vorprogrammiert)
1 E2M231 Monitor 7" TFT-LCD mit LED-Backlight,
1 Videoeingang zur Anzeige des Videobildes.
1 E2M239 Halterung für Monitor E2M231
1 E2M203 Verbindungskabel für analoges Videosignal, M16-
Stecker auf M16-Buchse, 5 m schwarz, PVC-Kabel
1 E3M161 Analog-Videoadapterkabel, M12-Stecker auf M16-
Stecker, zum Anschluss von O3M261 an E2M203, 1 m
schwarz
7
O3M Bereichsüberwachung
5 Schnelleinstieg
Das Kapitel "Schnelleinstieg" gibt verkürzt die Montage, den elektrischen Anschluss und die
Inbetriebnahme wieder.
2. Abb.: Verbundene Geräte des Sets ZZ1103
E3M171
CAN-Adapterkabel CR0451
System läuft
und ist verfügbar
24 V BasicDisplay
DC
ok
E3M133
Anschlusskabel
E3M171
CAN-Adapterkabel
O3M261 O3M960 E3M171 CR0403
3D-Sensor Beleuchtungs- CAN-Adapterkabel BasicController
einheit
E3M161 E3M120 E3M172
Verbindungs- MCI-Verbindungskabel Adapterkabel
kabel
80281057
Akustischer
Signalgeber
E2M231 E2M203
Integriertes Verbindungskabel
Verbindungskabel
E2M231
Monitor 7“ TFT-LCD
3. Abb.: Übersicht der verbundenen Geräte
8
O3M Bereichsüberwachung
5.1 Verbindungsübersicht
Die Tabelle zeigt wie die Geräte verbunden werden. Die Spalte "Anschlüsse" enthält die Anschlüsse des
Gerätes. Die Spalte "Verbindungsziel" enthält die Verbindungsziele des jeweiligen Anschlusses.
Artikel Abbildung Anschlussbelegung Anschluss Verbindungsziel
E3M171 Steckerleiste → ① CR0403
DE
①
M12-Buchse, lang → ① O3M261, M12-Stecker
M12-Buchse, kurz → ① CR0451
Leitung, braun → U+ (24 V DC)
Leitung, blau → GND
O3M261 ① CAN / Power → E3M171, lang, M12
② Ethernet Wird nicht verwendet.
►► Die Buchse mit einer
4
Schutzkappe vor
Feuchtigkeit schützen.
③ MCI → E3M120, abgewinkelt
④ Videoausgang → E3M161
O3M960 ① MCI → E3M120, nicht
abgewinkelt
② Power → E3M133
E3M120 Abgewinkelt → O3M261
Nicht abgewinkelt → O3M960
E3M133 M12-Buchse → O3M960
Leitungen, braun → U+ (24 V DC)
Leitungen, blau → GND
9
O3M Bereichsüberwachung
Artikel Abbildung Anschlussbelegung Anschluss Verbindungsziel
E3M172 Steckerleiste → ② CR0403
②
Leitung, weiß → 80281057, Klemme 30
Leitung, schwarz → 80281057, Klemme 31b
80281057 Klemme 30 → E3M172, weiß
(akustischer 31b Klemme 31b → E3M172, schwarz
Signalgeber)
30
CR0403 ① Inputs → optional (IN011: Standby)
N2
② Outputs → E3M172
A B C D E F ③ Power / CAN → E3M171
P/N1
CR0451 ① CAN → E3M171, kurz, M12
E2M231 ① Power → rot: U+ (24 V DC)
→ weiß: GND
1 2
② Videoeingang → E2M203
E2M203 M16-Stecker → E2M231, Videoeingang
M16-Buchse → E3M161, M16-Stecker
E3M161 M16-Stecker → E2M203, M16-Buchse
M12-Stecker → ④ O3M261, M12-Buchse
4
10O3M Bereichsüberwachung
5.2 Montage
►► Die Geräte wie in der 3. Abb. verbinden.
►► Den 3D-Sensor möglichst mittig auf das Fahrzeug montieren (siehe 11. Abb.).
>> Wenn eine mittige Montage des 3D-Sensors nicht möglich ist: Über die Bereichsdefinition die
Abweichung ausgleichen (→ "10.1.5 Bereichsdefinition - Experteneinstellungen").
►► Von vorne betrachtet die Beleuchtungseinheit direkt rechts neben dem 3D-Sensor montieren (siehe 8. DE
Abb.).
>> Andernfalls reduziert sich die Erkennungsrate von Objekten.
>> Die Anbauposition des 3D-Sensors und der Beleuchtungseinheit wird so gewählt, dass das Sichtfeld
und der Messbereich des 3D-Sensors den zu überwachenden Bereich erfassen.
Für den 3D-Sensor und die Beleuchtungseinheit gelten die folgenden Werte:
3D-Bild 2D-Bild
Sichtfeld 95° x 32° 120° x 90°
Messbereich ca. 8 m >8m
Das 2D-Bild deckt einen größeren Messbereich ab als das 3D-Bild.
Die Tabelle enthält exemplarische Werte zu verschiedenen Anbaupositionen (in Abhängigkeit vom
Montageort unter Beachtung einer minimalen Distanz A vor dem 3D-Sensor).
Anbauhöhe h Empfohlener Min. Distanz Max. Distanz Breite am Breite am Ende des
[m] Neigungswinkel A [m] B [m] Fahrzeug C [m] Sichtfeldes D [m]
α [°] 2D 3D 2D 3D
1.6 20 0.5 8 2.2 1.5 30 19.5
2 29 0.6 5.6 3 2 20 13
2.2 34 0.6 4.6 3.6 2.4 17 11
2.4 38 0.7 4.2 4.3 2.8 16 10
2.6 42 0.7 3.9 4.9 3.2 15 9.8
2.8 46 0.7 3.6 5.5 3.6 14.5 9.5
3 48 0.7 3.5 6 4 14.5 9.5
Die 4. Abb. zeigt den montierten 3D-Sensor mit Beleuchtungseinheit an einem Fahrzeug. Die Buchstaben
"A-D" sind Werten aus der vorherigen Tabelle zugeordnet.
4. Abb.: schematische Darstellung des 3D-Sichtfeldes eines montierten 3D-Sensors
Die 5. Abb. zeigt den 3D-Sensor mit Beleuchtungseinheit montiert an einem Bagger. Die Buchstaben "h"
und "α" sind Werten aus der vorherigen Tabelle zugeordnet.
11O3M Bereichsüberwachung
α
h
5. Abb.: 3D-Sensor mit Beleuchtungseinheit am Heck eines Baggers montiert
12O3M Bereichsüberwachung
5.3 Bereichsüberwachung einstellen
Die Bereichsüberwachung ist in 3 Zonen unterteilt. Die Zonen stellen Gefahrenstufen dar, wobei die
Zone [ ] die geringste und die Zone [ ] die höchste Gefahrenstufe darstellt. Die Größe der Zonen kann
für verschiedene Fahrzeuge und Szenarien eingestellt werden. Die Entfernung zum detektierten Objekt
bestimmt die aktive Zone.
Die folgenden Punkte ändern sich, sobald ein Objekt in einer Zone erkannt wird:
●● die Ausgabe des BasicControllers, DE
●● die Hintergrund- und Textfarbe des BasicDisplays,
●● das ausgegebene Tonsignal (bei verbundenen akustischen Signalgeber).
Im Folgenden wird die Bereichsüberwachung mit dem BasicDisplay eingestellt. Nach dem Einstellen wird
der Monitoring-Modus aktiviert und das System ist betriebsbereit (→ "10.2 Monitoring-Modus").
Startbildschirm Betriebszustand Geräteinformationen
Der Startbildschirm wird beim Der Betriebszustand zeigt den Die Geräteinformationen zeigen
Starten des Systems angezeigt. Betriebszustand der Geräte an Informationen zu den einzelnen
(→ "11.2 Betriebszustände"). Geräten des Sets an:
Nach dem Einschalten dauert ●● Seriennummer
es bis zu 30 sec, bis alle ●● Firmware- und Bibliotheks-
Geräte betriebsbereit sind. Versionen
●● Betriebszustand
Belegung der Funktionstasten
[ ] Sprache wählen [Info] Geräteinformationen anzeigen
[Monitor] Monitoring-Modus starten [Assist] Konfigurationsassistenten starten
[Zurück] Vorherige Bildschirmseite anzeigen [Expert] Experteneinstellungen starten
Belegung des Navigationskreuzes
[◄] Vorherige Bildschirmseite anzeigen [►] Nächste Bildschirmseite anzeigen
13O3M Bereichsüberwachung
Kalibrierung Automatische Kalibrierung
Die gemessene Höhe und der Die automatische Kalibrierung versucht den Neigungswinkel und die
Neigungswinkel des 3D-Sensors Höhe des 3D-Sensors zu ermitteln.
werden manuell eingegeben.
Für die automatische Kalibrierung muss der 3D-Sensor freie
Die Werte müssen vorher Sicht auf den Boden haben (ca. 3 m Breite und 3 m Länge).
gemessen werden (→ "7.3
Neigungswinkel und Höhe des Die automatische Kalibrierung kann bis zu 80 s dauern.
3D-Sensors messen").
Die folgenden Stati werden angezeigt:
●● "sucht": Der 3D-Sensor wird automatisch kalibriert.
●● "erfolgreich": Die automatische Kalibrierung wurde erfolgreich
abgeschlossen.
●● "kein Erfolg": Die automatische Kalibrierung wurde nicht
erfolgreich abgeschlossen. Die automatische Kalibrierung ist
nicht zwingend notwendig. Es können auch nur die manuell
eingegebenen Werte verwendet werden.
Zum Abschluss der Kalibrierung werden die erfassten Werte zur
Prüfung angezeigt.
►► Mit [Weiter] die angezeigten Werte übernehmen.
Objekterfassungsart Bereichsdefinition
Die Objekterfassungsart stellt ein, wie Die Bereichsdefinition legt fest, wie die Zonenbreiten
Objekte behandelt werden: eingestellt werden:
●● [Standard]: Es werden Objekte und ●● [Standardeinstellungen]: Der linke und rechte Bereich
Reflektoren in allen Zonen erkannt. der Zonen wird gleichwertig eingestellt (→ "10.1.4
Zwischen Objekten und Reflektoren Bereichsdefinition - Standardeinstellungen").
wird nicht unterschieden. Die Einstellung wird empfohlen bei mittig auf dem
●● [Reflektor]: In der Zone [ ] werden Fahrzeug montiertem 3D-Sensor.
nur Objekte mit Reflektoren erkannt
(z.B. Warnwesten). ●● [Experteneinstellungen]: Der linke und rechte Bereich
In den Zonen [ ] und [ ] werden der Zonen wird separat eingestellt (→ "10.1.5
Objekte und Reflektoren erkannt. Bereichsdefinition - Experteneinstellungen").
Die Einstellung [Reflektor] wird Die Einstellung wird empfohlen bei
bei steilen Rampen empfohlen. ●● nicht mittig auf dem Fahrzeug montiertem
3D-Sensor oder
●● einer in der Breite asymmetrischen
Fahrzeuggeometrie.
14O3M Bereichsüberwachung
Bereichsdefinition Bereichsdefinition - Zonen
DE
Die Bereichsdefinition stellt Die Zonen werden über die Länge und Breite eingestellt. Der linke
die Zonen über die Breite und und rechte Bereich der Zonen wird gleichwertig eingestellt. Addiert
Länge ein. Die Zonen stellen ergeben der linke und rechte Bereich die Gesamtbreite.
Gefahrenstufen dar, wobei
Die "min. Höhe" stellt die minimale Detektionshöhe ein. Unterhalb
die Zone [ ] die geringste
der minimalen Detektionshöhe werden erkannte Objekte ignoriert.
und die Zone [ ] die höchste
Dadurch werden Falschauslösungen reduziert durch
Gefahrenstufe darstellt.
●● Rampen,
Innerhalb der Zone [ ] werden
Objekte ignoriert. Das eignet ●● Bodenunebenheiten,
sich besonders für Anbauteile
●● bodennahe Objekte.
im Erfassungsbereich des
3D-Sensors.
Bereichsdefinition - Zonen
Die eingestellten Werte der
Zonen speichern.
Belegung der Funktionstasten
[Zurück] Vorherige Bildschirmseite anzeigen [Weiter] Eingabe speichern und nächste
Bildschirmseite anzeigen
[ ] Länge und Breite der Zone [ ] einstellen [ ] Länge und Breite der Zone [ ] einstellen
[ ] Länge und Breite der Zone [ ] einstellen [ ] Länge und Breite der Zone [ ] einstellen
[-] Gewählten Wert verkleinern [+] Gewählten Wert vergrößern
[ok] Eingabe übernehmen [Ja] Eingaben speichern
[Nein] Eingaben nicht speichern
Belegung des Navigationskreuzes
[▲] Vorherigen Menüpunkt wählen [▼] Nächsten Menüpunkt wählen
[◄] Vorherige Bildschirmseite anzeigen [►] Nächste Bildschirmseite anzeigen
Sobald die Bereichsüberwachung eingestellt wurde, ist das System betriebsbereit und läuft im
Monitoring-Modus. Das BasicDisplay zeigt auf dem Bildschirm, in welcher Zone ein Objekt erkannt
wurde. Ist der E2M-Monitor verbunden, wird die Gefahrenstufe dort zusätzlich angezeigt.
15O3M Bereichsüberwachung
6 Funktion
Die im Set ZZ1103 enthaltenen Geräte ergeben ein Assistenzsystem, welches das Überwachen von
Gefahrenbereichen unterstützt. Ein Gefahrenbereich kann beispielsweise der tote Winkel von mobilen
Maschinen sein.
6.1 Mobile 3D Smart Sensor
Der Mobile 3D Smart Sensor ist für den Betrieb auf mobilen Maschinen zugelassen. Der Mobile 3D Smart
Sensor besteht aus einem aktiven 3D-Sensor mit 1024 Pixeln, welcher 1024 Distanzwerte gleichzeitig
ausgibt. Hierfür wird das „Time of Flight“-Messprinzip verwendet.
6.2 CAN-Bus
Über den CAN-Bus sind alle notwendigen Signale verfügbar. Der 3D-Sensor O3M261 sendet Daten über
den CAN-Bus an den BasicController CR0403 und das BasicDisplay CR0451.
6.3 Applikationspaket
Das im Set ZZ1103 enthaltene Applikationspaket Bereichsüberwachung erlaubt den einfachen Einsatz
der genannten Technologien auf mobilen Maschinen. Es ist keine Programmierung notwendig. Das
Applikationspaket wird über die Einrichtungshilfe auf dem BasicDisplay konfiguriert. Es werden
3 rechteckige Warnzonen konfiguriert. Jede Warnzone kann unabhängig auf verschiedene Objekte und
Signale reagieren. Wird in einer Warnzone etwas erkannt, gibt das System Warnungen aus:
●● Tonsignal über den akustischen Signalgeber,
●● visuell sichtbares Signal über das BasicDisplay,
●● grafische Darstellung im Livebild des E2M-Monitors.
Detaillierte Hinweise zur Funktionsweise enthalten die Bedienungsanleitungen der Geräte.
16O3M Bereichsüberwachung
7 Montage
7.1 BasicController montieren
ACHTUNG
Der BasicController und das BasicDisplay können am Anbauort Motor beschädigt werden.
►► Den BasicController und das BasicDisplay am Anbauort Karosserie montieren. DE
① ① ►► Den BasicController über die Anschraubpunkte ① auf
einen geeigneten Untergrund montieren.
① ①
6. Abb.: Montage des BasicControllers
7.2 3D-Sensor und Beleuchtungseinheit montieren
Vom Montageort des 3D-Sensors aus wird der gewünschte Bereich überwacht. Ausschlaggebend dafür
sind das Sichtfeld und der Messbereich des 3D-Sensors. Für den im Set enthaltenen 3D-Sensor O3M261
und die Beleuchtungseinheit O3M960 gelten die folgenden Werte:
3D-Bild 2D-Bild
Sichtfeld 95° x 32° 120° x 90°
Messbereich ca. 8 m >8m
Das 2D-Bild des 3D-Sensors deckt einen größeren Messbereich ab als das 3D-Bild.
7. Abb.: 3D-Sichtfeld des O3M261 in 1,7 m Höhe mit Neigungswinkel 45°
►► Die Anbauposition für 3D-Sensor und Beleuchtungseinheit wählen.
>> Der mitgelieferte 3D-Sensor eignet sich für sehr nah zu überwachende Bereiche.
17O3M Bereichsüberwachung
Die Tabelle enthält exemplarische Werte zu verschiedenen Anbaupositionen (in Abhängigkeit vom
Montageort unter Beachtung einer minimalen Distanz A vor dem 3D-Sensor).
Anbauhöhe h Empfohlener Min. Distanz Max. Distanz Breite am Breite am Ende des
[m] Neigungswinkel A [m] B [m] Fahrzeug C [m] Sichtfeldes D [m]
α [°] 2D 3D 2D 3D
1.6 20 0.5 8 2.2 1.5 30 19.5
2 29 0.6 5.6 3 2 20 13
2.2 34 0.6 4.6 3.6 2.4 17 11
2.4 38 0.7 4.2 4.3 2.8 16 10
2.6 42 0.7 3.9 4.9 3.2 15 9.8
2.8 46 0.7 3.6 5.5 3.6 14.5 9.5
3 48 0.7 3.5 6 4 14.5 9.5
►► Den 3D-Sensor mit der Halterung E3M102 möglichst mittig auf das Fahrzeug montieren (siehe 11.
Abb.).
>> Wenn eine mittige Montage des 3D-Sensors nicht möglich ist: Über die Bereichsdefinition die
Abweichung ausgleichen (→ "10.1.5 Bereichsdefinition - Experteneinstellungen").
8. Abb.: Montage von 3D-Sensor und Beleuchtungseinheit nebeneinander
►► Von vorne betrachtet die Beleuchtungseinheit mit der Halterung E3M102 direkt rechts neben dem
3D-Sensor montieren (siehe 8. Abb.).
>> Die Geräte sind für die Montage direkt nebeneinander kalibriert. Andernfalls reduziert sich die
Erkennungsrate von Objekten.
►► Den 3D-Sensor über das MCI Verbindungskabel mit der Beleuchtungseinheit verbinden.
Den Ausleuchtungsbereich der Beleuchtungseinheit im Nahbereich (bis 50 cm) von Anbauteilen
freihalten.
►► Leitungen mit Zugentlastungen verwenden.
18O3M Bereichsüberwachung
7.3 Neigungswinkel und Höhe des 3D-Sensors messen
Der 3D-Sensor muss kalibriert werden, bevor er verwendet werden kann. Für die Kalibrierung sind der
Neigungswinkel und die Höhe des 3D-Sensors notwendig.
Der Neigungwinkel und die Höhe beziehen sich auf das Weltkoordinatensystem. Beide Werte werden für
die Inbetriebnahme benötigt (→ "10 Inbetriebnahme").
DE
9. Abb.: Neigungswinkel α mit einem Smartphone messen
Der Neigungswinkel α wird am einfachsten mit einem Smartphone gemessen:
►► Das Smartphone mit einer App zum Winkel messen zur rot markierten Geraden parallel ausrichten.
>> Die Gerade trennt die beiden Gehäuseteile des 3D-Sensors.
10. Abb.: Höhe über die Referenzbuchse des 3D-Sensors messen
In den Seiten des 3D-Sensors befindet sich eine Referenzbuchse (siehe 10. Abb.). Über die
Referenzbuchse wird die Höhe des 3D-Sensors gemessen:
►► Die Distanz vom Boden bis zur rot markierten Referenzbuchse des 3D-Sensors messen.
19O3M Bereichsüberwachung
7.4 Beispiel für Montage des 3D-Sensors am Fahrzeugheck
Die 11. Abb. zeigt den an einem Fahrzeug mittig montierten 3D-Sensor mit direkt daneben montierter
Beleuchtungseinheit. Die Buchstaben "A-D" sind Werten aus der vorherigen Tabelle zugeordnet.
11. Abb.: schematische Darstellung des 3D-Sichtfeldes eines montierten 3D-Sensors
Die Abbildung zeigt das Sichtfeld trapezförmig auf dem Boden, mit einer Breite von C=3 m in 0,5 m
Entfernung (A) und einer Breite von D=11 m in einer Entfernung von 5 m (B).
Der verbleibende Blindbereich hinter dem Fahrzeug muss so klein wie möglich sein.
Die Lage des Bodens zum Koordinatensystem des 3D-Sensors ist kalibrierbar. Dadurch ist eine
genauere Distanzmessung möglich, unabhängig von Anbauhöhe und Neigungswinkel (→ "10.1.3
Konfigurationsassistent").
20O3M Bereichsüberwachung
8 Elektrischer Anschluss
Die Geräte dürfen nur von einer Elektrofachkraft installiert werden.
Gerät der Schutzklasse III (SK III)
Die elektrische Versorgung darf nur über PELV-Stromkreise erfolgen.
Die elektrische Versorgung muss der UL61010-1, Kap. 9.4 - Limited Energy entsprechen:
Die Überstromschutzeinrichtung muss einen Strom von 6,6 A in 120 s abschalten. Bei der Dimen- DE
sionierung der Überstromschutzeinrichtung technische Daten des Gerätes und der Verkabelung
berücksichtigen.
Die Isolierung externer Stromkreise muss der UL61010-2-201, Abb. 102 entsprechen.
►► Stromversorgung vor elektrischen Anschluss spannungsfrei schalten.
►► Für Kabellängen > 30 m einen zusätzlichen Schutz gegen Stoßspannungen nach IEC 61000-4-5
verwenden.
Die im Datenblatt angegebene IP-Schutzart wird nur bei fest verschraubten M12-Steckverbindern
gewährleistet.
Die Geräte können durch locker verschraubte M12-Steckverbinder beschädigt werden.
►► Die M12-Steckverbinder fest mit dem Gerät verschrauben.
Nicht benutzte Buchsen mit Verschlusskappen verschließen (E73004).
Anzugsdrehmoment 0,6...0,8 Nm.
Für den Gültigkeitsbereich cULus: Mindesttemperaturfestigkeit des Kabels zum Anschluss an
Feldanschlussklemmen: 70 °C.
Verfügbares Zubehör: www.ifm.com
12. Abb.: Verbundene Geräte des Sets ZZ1103
21O3M Bereichsüberwachung
E3M171
CAN-Adapterkabel CR0451
System läuft
und ist verfügbar
24 V BasicDisplay
DC
ok
E3M133
Anschlusskabel
E3M171
CAN-Adapterkabel
O3M261 O3M960 E3M171 CR0403
3D-Sensor Beleuchtungs- CAN-Adapterkabel BasicController
einheit
E3M161 E3M120 E3M172
Verbindungs- MCI-Verbindungskabel Adapterkabel
kabel
80281057
Akustischer
Signalgeber
E2M231 E2M203
Integriertes Verbindungskabel
Verbindungskabel
E2M231
Monitor 7“ TFT-LCD
13. Abb.: Übersicht der verbundenen Geräte
22O3M Bereichsüberwachung
8.1 Anschlussbelegung 3D-Sensor
① Stromversorgung und CAN-Bus
M12 Stecker, A-kodiert, 5-polig
1 Shield
2 1 2 24 V
5 3 GND DE
3 4 4 CAN High
5 CAN Low
② Ethernet
M12 Buchse, D-kodiert, 4-polig
1 Ethernet TD +
2 Ethernet RD +
3 Ethernet TD -
4 Ethernet RD -
S Shield
③ MCI - Modulation and Communication Interface
Verbindung Sensor - Beleuchtungseinheit
14. Abb.: Anschlussbelegung 3D-Sensor, Rückseite
④ Analog-Videoausgang (PAL)
M12 Buchse, A-kodiert, 5-polig
1 Shield
2 n.c.
3 GND
4 FBAS (Video)
4 5 n.c.
15. Abb.: Anschlussbelegung 3D-Sensor, Unterseite
8.2 Anschlussbelegung Beleuchtungseinheit
① MCI - Modulation and Communication Interface
Verbindung Sensor - Beleuchtungseinheit
Nur original ifm Kabel E3M120, E3M121, E3M122 oder E3M123 verwenden.
② Stromversorgung
M12 Stecker, A-kodiert, 4-polig
1 GND
2 24 V
3 24 V
4 GND
16. Abb.: Anschlussbelegung Beleuchtungseinheit, Unterseite
23O3M Bereichsüberwachung
8.3 Anschlussbelegung BasicController
Die Versorgungsleitungen, CAN-Schnittstellen und Ein-/Ausgänge werden über 6,3 x 0,8 mm Flachstecker auf
der Frontseite des BasicControllers verbunden.
Der BasicController enthält eine anwendungsspezifische Konfiguration (das Applikationspaket
Bereichsüberwachung). Abhängig von der Konfiguration sind nur bestimmte Eingänge verfügbar.
N2
A B C D E F
① Eingänge
P/N1
② Ausgänge
③ Versorgung und CAN-Schnittstellen
17. Abb.: Anschlussbelegung BasicController
Block Belegung Beschreibung Polzahl
A Eingänge IN0...3 Reserviert. Nicht verwenden. 8
B IN4...7 Reserviert. Nicht verwenden.
C IN8...10 Reserviert. Nicht verwenden.
IN11 High: System im Standby, low: System aktiv
Das Verhalten des Eingangs ist einstellbar (→
"10.1.2 Experteneinstellungen").
D Ausgänge OUT0 binär High: System verfügbar, low: System nicht verfügbar
OUT1 binär High: Objekt in Zone rot
OUT2 binär High: Objekt in Zone orange
OUT3 binär High: Objekt in Zone gelb
E OUT4 binär High: Objekt in Zone rot, orange oder gelb
OUT5 binär -
OUT6 binär
OUT7 binär Anschluss für optischen Signalgeber:
●● Leuchtet dauerhaft: Zone rot
●● Blinkfrequenz hoch: Zone orange
●● Blinkfrequenz niedrig: Zone gelb
F OUT8, analog 0-100: Die Distanz zum nächsten Objekt wird in %
angegeben. 100% entspricht 10 m
OUT9, binär Akustischer Signalgeber:
●● Dauerton: Zone rot
●● Tonfrequenz hoch: Zone orange
●● Tonfrequenz niedrig: Zone gelb
Die Lautstärke ist einstellbar (→ "10.1.2
Experteneinstellungen").
OUT10, binär High: Sensorscheibe verdreckt, low: Sensorscheibe
sauber
OUT11, binär High: normaler Betriebsmodus, low: Fehlerzustand
P/N1 CAN-Schnittstelle 1 und Versorgung 6
N2 CAN-Schnittstelle 2 4
24O3M Bereichsüberwachung
Die Ausgänge des BasicControllers (Block D, E und F) können als Eingangssignale für
Motorsteuergeräte oder ähnliches verwendet werden. Der Block F ist reserviert.
8.4 Anschlussbelegung E2M-Monitor
① Stromversorgung
7 Leitungen, offene Enden
DE
rot U+ (24 V DC)
1 2
weiß GND
VORSICHT
Fehlfunktion
Die nicht benötigten Leitungen können eine
Fehlfunktion des E2M-Monitors verursachen.
Es werden nur die rote (U+) und weiße Leitung
(GND) benötigt.
►► Die Leitungen blau, braun, weiß/gelb, grau
und gelb isolieren.
② Analoger Videoeingang
M16-Buchse, 4-polig
1 Koax Leitungskern (Video Signal)
2 3
2 Koax Schirm (Video GND)
1 4
3 U+ (12 V DC)
4 GND
18. Abb.: Anschlussbelegung E2M-Monitor
8.5 BasicController mit BasicDisplay verbinden
1. Das CAN-Adapterkabel E3M171 in ①
"P/N1" stecken.
①
2. Den Stecker für den akustischen
Signalgeber (E3M172) in ② "Block F"
stecken.
>> Der Stecker (E3M172) ist nur
notwendig, wenn der akustische
Signalgeber verwendet wird.
②
25O3M Bereichsüberwachung
3. Die weiße Leitung von E3M172 auf
31b die Klemme 30 des akustischen
Signalgebers stecken.
30 4. Die schwarze Leitung von E3M172
auf die Klemme 31b des akustischen
Signalgebers stecken.
5. Die M52-Mutter ③ vom BasicDisplay
entfernen.
6. Das BasicDisplay ⑤ in die
Displayaufnahme der Abdeckung ④
setzen.
>> Das BasicDisplay schließt mit der
Abdeckung nicht bündig ab.
7. Die M52-Mutter ① handfest auf das
③ ④ ⑤ BasicDisplay schrauben.
8. Die M12-Buchse der kurzen Leitung
des CAN-Adapterkabels E3M171
verbinden mit dem M12-Stecker des
BasicDisplay.
9. Den Verriegelungshebel ⑧ der
⑩
Abdeckung nach vorne schwenken.
⑧ 10. Die übrigen Leitungen des CAN-
Adapterkabels E3M171 durch die
Gummilippe der Abdeckung nach
außen führen.
11. Die Führungsbügel ⑦ in die
Aufnahmeschlitze ⑥ des
BasicController stecken.
⑥⑦ ⑨ 12. Den akustischen Signalgeber
innerhalb der Abdeckung oder mit den
Verlängerungsleitungen außerhalb
der Abdeckung platzieren.
Beim Platzieren innerhalb der
Abdeckung:
►► Den Signalgeber so
platzieren, dass die Kontakte
des BasicControllers nicht
kurzgeschlossen werden.
13. Die Versorgungs- und Signalleitungen
getrennt führen.
14. Die Versorgungs- und Signalleitungen
auf kürzestem Weg vom Gerät
wegführen.
15. Die Leitungen mindestens 10 cm
nach Geräteaustritt mit einer
Zugentlastung versehen.
26O3M Bereichsüberwachung
16. Die Abdeckung auf den
⑩ BasicController kippen.
>> Die Führungsbügel ⑨ dienen beim
⑧ Kippen als Drehpunkt.
DE
⑨
17. Den Verriegelungshebel ⑩ in die
⑩ Ausgangsposition zurückschwenken.
>> Die Abdeckung ist verriegelt.
8.6 3D-Sensor und Beleuchtungseinheit verbinden
1. Die M12-Buchse der langen Leitung des CAN-Adapterkabels E3M171
verbinden mit dem M12-Stecker des 3D-Sensors ①.
2. Den blauen und braunen Leitungsdraht des E3M171 mit einer
Stromversorgung verbinden: Blau: GND, braun: L+ (24 V).
Über das CAN-Adapterkabel E3M171 werden das BasicDisplay, der
BasicController und der 3D-Sensor mit Strom versorgt.
Zum Erhalt des IP-Schutzgrades muss die Buchse ② mit einer
Verschlusskappe verschraubt sein.
3. Das MCI-Verbindungskabel E3M120 mit dem Stecker ③ des 3D-Sensors
verbinden.
4. Das andere Ende des MCI-Verbindungskabels E3M120 mit dem Stecker ①
der Beleuchtungseinheit verbinden.
5. Die M12-Buchse des Anschlusskabels E3M133 mit dem M12-Stecker ②
der Beleuchtungseinheit verbinden.
6. Alle 4 Leitungsdrähte des E3M133 mit einer Stromversorgung verbinden:
Blau: GND, braun: L+ (24 V).
27O3M Bereichsüberwachung
8.7 E2M-Monitor verbinden
ACHTUNG
Der E2M-Monitor und der 3D-Sensor nehmen Schaden, wenn getrennte Massen verwendet
werden.
►► Die Massen (GND) von 3D-Sensor und E2M-Monitor verbinden.
① E3M161 ② ③ E2M203 ④ 1. Den M16-Stecker ② des Videoadapterkabels
E3M161 mit der M16-Buchse ③ des
Verbindungskabels E2M203 verbinden.
2. Den M12-Stecker ① des Videoadapterkabels
E3M161 mit der M12-Buchse auf der Unterseite des
3D-Sensors verbinden.
3. Den M16-Stecker ④ des Verbindungskabels
E3M203 mit der M16-Buchse ⑥ des E2M-Monitors
verbinden.
5 6 4. Den roten und weißen Leitungsdraht ⑤ des E2M-
Monitors mit einer Stromversorgung verbinden.
>> Weiß: GND, rot: L+ (24 V).
5. Die Massen (GND) von 3D-Sensor und E2M-
Monitor verbinden.
28O3M Bereichsüberwachung
9 Anzeige- und Bedienelemente
Sobald ein Objekt innerhalb der Bereichsüberwachung erkannt wird:
●● Die Ausgabe des BasicControllers ändert sich abhängig vom Abstand zum detektierten Objekt.
●● Die Hintergrund- und Textfarbe des BasicDisplays ändert sich.
●● Ein akustisches Signal wird ausgegeben, wenn der akustische Signalgeber verbunden ist.
DE
9.1 BasicDisplay
Die Bereichsüberwachung wird über das Tastenfeld des BasicDisplay bedient.
① Bildschirm Status und Einstellungen anzeigen
➀ ② Funktionstasten
auf dem Display angezeigte Funktion
➁ verwenden
➄
Status des BasicControllers anzeigen
③ Status-LED
ok
➂ (→ "11.1 Status-LED")
➃ ④ OK-Taste Eingabe oder Auswahl bestätigen
⑤ Navigationskreuz durch Auswahl navigieren
19. Abb.: Bildschirm und Tastenfeld des BasicDisplay
9.2 Akustischer Signalgeber
Abhängig von der Zone, in der ein Objekt erkannt wurde, ertönt ein akustisches Signal.
Wenn der akustische Signalgeber nach dem Neustart des 3D-Sensors piept:
►► Die 4 Funktionstasten zeitgleich drücken (→ "9 Anzeige- und Bedienelemente").
►► In den Experteneinstellungen des I/O-Module die Lautstärke des akustischen Warnsignals auf
"Aus"einstellen (→ "10.1.2 Experteneinstellungen").
Der akustische Signalgeber ist optional (→ "8.5 BasicController mit BasicDisplay verbinden").
29O3M Bereichsüberwachung
10 Inbetriebnahme
Vor der Inbetriebnahme wird die Bereichsüberwachung eingestellt (→ "10.1.3 Konfigurationsassistent").
Für die Inbetriebnahme sind die folgenden Parameter des 3D-Sensors und des Fahrzeugs notwendig:
●● Neigungswinkel des 3D-Sensors
●● Höhe des 3D-Sensors (→ "7.3 Neigungswinkel und Höhe des 3D-Sensors messen")
●● Breite des Fahrzeugs inkl. Toleranz
Nach der Inbetriebnahme ist der Monitoring-Modus aktiviert und das System ist betriebsbereit (→ "10.2
Monitoring-Modus").
Nach der Inbetriebnahme einen Funktionstest ausführen:
►► Mit typischer Geschwindigkeit auf ein Objekt zufahren und die Reaktion des Systems prüfen.
10.1 Bereichsüberwachung einstellen
Die Bereichsüberwachung ist in 3 Zonen unterteilt. Die 3 Zonen stellen Gefahrenstufen dar, wobei die
Zone [ ] die geringste und die Zone [ ] die höchste Gefahrenstufe darstellt. Die Größe der Zonen kann
für verschiedene Fahrzeuge und Szenarien eingestellt werden. Die Entfernung zum detektierten Objekt
bestimmt die aktive Zone:
●● Zone [ ] (gelb): Gefahrenstufe 1
●● Zone [ ] (orange): Gefahrenstufe 2
●● Zone [ ] (rot): Gefahrenstufe 3
Die folgenden Punkte ändern sich, sobald ein Objekt in einer Zone erkannt wird:
●● die Ausgabe des BasicControllers,
●● die Hintergrund- und Textfarbe des BasicDisplays,
●● das ausgegebene Tonsignal (bei verbundenen akustischen Signalgeber).
Befindet sich ein Objekt in mehr als 1 Zone, wird die am nächsten gelegene Gefahrenstufe angezeigt.
Die 3 Zonen neu einstellen:
►► Die 4 Funktionstasten zeitgleich drücken (→ "9 Anzeige- und Bedienelemente").
Im Folgenden wird die Bereichsüberwachung mit dem BasicDisplay eingestellt. Nach dem Einstellen wird
der Monitoring-Modus aktiviert und das System ist betriebsbereit (→ "10.2 Monitoring-Modus").
Das zeitgleiche Drücken der 4 Funktionstasten verlässt den angezeigten Bildschirm und startet den
Diagnose- und Parametriermodus.
30O3M Bereichsüberwachung
10.1.1 Startbildschirm und Betriebszustand
Startbildschirm Betriebszustand Geräteinformationen
DE
Der Startbildschirm wird beim Der Betriebszustand zeigt den Die Geräteinformationen zeigen
Starten des Systems angezeigt. Betriebszustand der Geräte an Informationen zu den einzelnen
(→ "11.2 Betriebszustände"). Geräten des Sets an:
Nach dem Einschalten dauert ●● Seriennummer
es bis zu 30 sec, bis alle ●● Firmware- und Bibliotheks-
Geräte betriebsbereit sind. Versionen
●● Betriebszustand
Belegung der Funktionstasten
[ ] Sprache wählen [Info] Geräteinformationen anzeigen
[Monitor] Monitoring-Modus starten [Assist] Konfigurationsassistenten starten
[Zurück] Vorherige Bildschirmseite anzeigen [Expert] Experteneinstellungen starten
Belegung des Navigationskreuzes
[◄] Vorherige Bildschirmseite anzeigen [►] Nächste Bildschirmseite anzeigen
31O3M Bereichsüberwachung
10.1.2 Experteneinstellungen
Experteneinstellungen für Display
Die Experteneinstellungen enthalten unter der Registerkarte [Display] Einstellungen für das BasicDisplay:
1. [Passwort-Einstellung]: Den Kennwortschutz für die Einstellungen der Bereichsüberwachung
aktivieren. Das Kennwort wird einmal pro Betriebszyklus abgefragt (Zeit zwischen Ein- und
Ausschalten). Das Kennwort "000" deaktiviert den Kennwortschutz.
Bei Verlust des Kennwortes: Das Master-Kennwort lautet "241".
2. [Parameterverwaltung]: Die Benutzereinstellungen des BasicDisplay verwalten:
–– [beim Start Konfig in I/O-Modul kopieren]: Beim Start die Benutzereinstellungen des BasicDisplay
auf den BasicController kopieren. Das ist hilfreich, wenn mit einem BasicDisplay mehrere
BasicController eingerichtet werden, das Set ZZ1103 zukünftig ohne das BasicDisplay betrieben
wird oder das BasicDisplay ausgetauscht wird.
–– [kein Austausch beim Start]: Beim Start keine Benutzereinstellungen zwischen BasicDisplay und
BasicController kopieren.
–– [beim Start Konfig aus I/O-Modul kopieren]: Beim Start die Benutzereinstellungen vom
BasicController lesen und auf das BasicDisplay schreiben. Das ist hilfreich, wenn die
Benutzereinstellungen auf ein neues BasicDisplay geschrieben werden sollen.
–– [zurücksetzen auf Standard Konfig]: Die Benutzereinstellungen auf die Standardwerte
zurücksetzen.
Belegung der Funktionstasten
[Zurück] Vorherige Bildschirmseite anzeigen [Weiter] Eingabe speichern und nächste
Bildschirmseite anzeigen
[Nullen] Gewählte Ziffer auf "0" zurücksetzen [Ändern] Gewählten Eintrag ändern
[Sichern] Einstellungen speichern
Belegung des Navigationskreuzes
[▲] Gewählte Ziffer erhöhen / [▼] Gewählte Ziffer verkleinern /
vorherigen Menüpunkt wählen nächsten Menüpunkt wählen
[◄] Vorherige Bildschirmseite anzeigen [►] Nächste Bildschirmseite anzeigen
32O3M Bereichsüberwachung
Experteneinstellungen für I/O-Module
DE
Die Experteneinstellungen enthalten unter der Registerkarte [IO-Module] Einstellungen für den
BasicController:
1. [Akustisches Warnsignal]: Die Lautstärke des akustischen Signalgebers einstellen. Mögliche
Einstellungen:
–– [Aus]
–– [100% Lautstärke]
–– [75% Lautstärke]
–– [50% Lautstärke]
2. [Standby Modus]: Den Standby-Modus für das System aktivieren, wenn am Eingang IN11 "High"
(Standardeinstellung) oder "Low" anliegt. Mögliche Einstellungen:
–– [0 = Kamera aktiv 1 = Standby]
–– [0 = Standby 1 = Kamera aktiv]
Belegung der Funktionstasten
[Zurück] Vorherige Bildschirmseite anzeigen [Weiter] Nächste Bildschirmseite anzeigen
[Ändern] Gewählten Eintrag ändern [Sichern] Einstellungen speichern
Belegung des Navigationskreuzes
[▲] Vorherigen Menüpunkt wählen [▼] Nächsten Menüpunkt wählen
[◄] Vorherige Bildschirmseite anzeigen [►] Nächste Bildschirmseite anzeigen
33O3M Bereichsüberwachung
Experteneinstellungen für 3D-Sensor
Im Standby-Modus
●● ist der Konfigurationsassistent nicht verfügbar,
●● können die Einstellungen des 3D-Sensors nicht verändert werden.
Die Experteneinstellungen enthalten unter der Registerkarte [3D-Sensor] Einstellungen für den 3D-Sensor:
1. [Verschmutzungserkennung]: Die Empfindlichkeit der aktiven Verschmutzungserkennung auf der
Scheibe des 3D-Sensors einstellen. Mögliche Einstellungen:
–– [Aus]
–– [Geringe Empfindlichkeit]
–– [Mittlere Empfindlichkeit]
–– [Hohe Empfindlichkeit]
2. [Schwellwert Reflektorerkennung]: Das Erkennen von Reflektoren einstellen. Bei niedrigen Stufen
werden Reflektoren besser erkannt.
Die Einstellung hat Auswirkungen auf das Erkennen von Objekten im Nahbereich und bei Nässe.
3. [Modulationsfrequenz]: Die Modulationsfrequenz hilft Interferenzen zu vermeiden, wenn sich die
Messbereiche mehrerer 3D-Sensoren überschneiden. Bei mehreren 3D-Sensoren auf einem
Fahrzeug wird jedem 3D-Sensor eine eigene Gruppe zugeteilt. Mögliche Einstellungen
–– [Gruppe 1]
–– [Gruppe 2]
–– [Gruppe 3]
4. [Intelligente Datenmittelung]: Die intelligente Datenmittelung berechnet einen Mittelwert der Rohdaten.
Es wird die Anzahl der Distanzmessungen eingestellt, über die eine Datenmittelung berechnet wird.
Eine hohe Einstellung verringert das Signalrauschen und erhöht die Genauigkeit des 3D-Sensors.
Allerings erhöht sich durch eine hohe Einstellung auch die Latenz. Mögliche Einstellungen:
–– [Aus]
–– [2 Bilder]
–– [3 Bilder]
5. [Filter Signalqualität]: Das "Filter Signalqualität" filtert Pixel von dunklen Objekten. Bei einer hohen
Einstellung muss die Signalqualität von Pixeln höher sein, um in der Auswertung einbezogen
zu werden. Eine hohe Einstellung verringert die Sensibilität, was zum Unterdrücken von
Falschauslösungen führt. Zeitgleich können dunkle und kleine Objekte schlechter erkannt werden.
Mögliche Einstellungen:
–– [Aus]
–– [Schwach]
–– [Mittel]
–– [Stark]
6. [Ausgabe des Ethernetsignals]: Die Ausgabe des Ethernetsignals ein- oder ausschalten. Mögliche
Einstellungen:
–– [Aus]
34O3M Bereichsüberwachung
–– [An]
7. [Ausgabe des 2D Bildes]: Die Ausgabe des 2D-Bildes ein- oder ausschalten. Das 2D-Bild ist ein
analoges PAL-Videosignal. Zusätzlich kann die Spiegelung des 2D-Bildes ein- oder ausgeschaltet
werden. Mögliche Einstellungen:
–– [2D Videosignal aus]
–– [2D Videosignal an]
–– [Keine Spiegelung 2D]
DE
–– [Spiegelung 2D (Rückfahrkamera)]
8. [Visualisierungskonfiguration]: Das Einblenden des ifm-Logos im 2D-Bild ein- oder ausschalten.
Mögliche Einstellungen:
–– [ifm Logo nicht sichtbar]
–– [ifm Logo sichtbar]
Empfohlene Einstellungen für verschiedene Fahrzeugtypen: (→ "13 Häufig gestellte Fragen").
Belegung der Funktionstasten
[Zurück] Vorherige Bildschirmseite anzeigen [Weiter] Nächste Bildschirmseite anzeigen
[Ändern] Gewählten Eintrag ändern [Sichern] Einstellungen speichern
[Reset] Gewählten Eintrag zurücksetzen
Belegung des Navigationskreuzes
[▲] Vorherigen Menüpunkt wählen [▼] Nächsten Menüpunkt wählen
[◄] Vorherige Bildschirmseite anzeigen [►] Nächste Bildschirmseite anzeigen
35O3M Bereichsüberwachung
10.1.3 Konfigurationsassistent
Konfigurationsassistent Kennwortschutz
Der Konfigurationsassistent Den Kennwortschutz für
führt Schritt für Schritt die Einstellungen der
durch die Konfiguration der Bereichsüberwachung aktivieren.
Bereichsüberwachung. Das Kennwort wird einmal pro
Betriebszyklus abgefragt (Zeit
zwischen Ein- und Ausschalten).
Das Kennwort "000" deaktiviert
den Kennwortschutz.
Bei Verlust des Kennwortes:
Das Master-Kennwort lautet
"241".
Im Standby-Modus
●● ist der Konfigurationsassistent nicht verfügbar,
●● können die Einstellungen des 3D-Sensors nicht verändert werden.
Belegung der Funktionstasten
[Zurück] Vorherige Bildschirmseite anzeigen [Weiter] Eingabe speichern und nächste
Bildschirmseite anzeigen
[Nullen] Gewählte Ziffer auf "0" zurücksetzen [Starten] Konfigurationsassistenten starten
Belegung des Navigationskreuzes
[▲] Gewählte Ziffer erhöhen / [▼] Gewählte Ziffer verkleinern /
vorherigen Menüpunkt wählen nächsten Menüpunkt wählen
[◄] Vorherige Bildschirmseite anzeigen [►] Nächste Bildschirmseite anzeigen
36O3M Bereichsüberwachung
Kalibrierung
Der 3D-Sensor muss kalibriert werden, bevor er verwendet werden kann. Für die Kalibrierung sind
der Neigungswinkel und die Höhe des 3D-Sensors notwendig (→ "7.3 Neigungswinkel und Höhe des
3D-Sensors messen").
Die Kalibrierung erfolgt in zwei Schritten:
1. Manuelle Eingabe des gemessenen Neigungswinkels und der Höhe des 3D-Sensors,
2. automatische Kalibrierung.
DE
Die automatische Kalibrierung optimiert die manuell eingegebenen Werten. Bei der automatischen
Kalibrierung wird der Boden im Sichtfeld erfasst und daraus der Neigungswinkel und die Höhe bestimmt.
Für die automatische Kalibrierung muss der 3D-Sensor freie Sicht auf den Boden haben (ca. 3 m
Breite und 3 m Länge). Die automatische Kalibrierung kann bis zu 80 s dauern.
Kalibrierung Automatische Kalibrierung
Die gemessene Höhe und der Die automatische Kalibrierung versucht den Neigungswinkel und
Neigungswinkel des 3D-Sensors die Höhe des 3D-Sensors zu ermitteln. Die folgenden Stati werden
werden manuell eingegeben. angezeigt:
Die Werte müssen vorher ●● "sucht": Der 3D-Sensor wird automatisch kalibriert.
gemessen werden (→ "7.3
●● "erfolgreich": Die automatische Kalibrierung wurde erfolgreich
Neigungswinkel und Höhe des
abgeschlossen.
3D-Sensors messen").
●● "kein Erfolg": Die automatische Kalibrierung wurde nicht
erfolgreich abgeschlossen. Die automatische Kalibrierung ist
nicht zwingend notwendig. Es können auch nur die manuell
eingegebenen Werte verwendet werden.
Zum Abschluss der Kalibrierung werden die erfassten Werte zur
Prüfung angezeigt.
►► Mit [Weiter] die angezeigten Werte übernehmen.
Belegung der Funktionstasten
[Zurück] Vorherige Bildschirmseite anzeigen [Weiter] Eingabe speichern und nächste
Bildschirmseite anzeigen
[OK] Automatische Kalibrierung starten
Belegung des Navigationskreuzes
[▲] Vorherigen Menüpunkt wählen [▼] Nächsten Menüpunkt wählen
[◄] Vorherige Bildschirmseite anzeigen [►] Nächste Bildschirmseite anzeigen
37Sie können auch lesen

















































