Fahrassistenzsysteme-Automatisiertes Fahren - Chancen und Risiken Chancen und Risiken - VDRI
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Chancen und Risiken
Fahrassistenzsysteme- Automatisiertes
Fahren
Chancen und Risiken
Unfallprävention – Wege und Dienstwege
Herr Dr. Michael Geiler
Referent für den Deutschen Verkehrssicherheitsrat (DVR)
© Deutscher Verkehrssicherheitsrat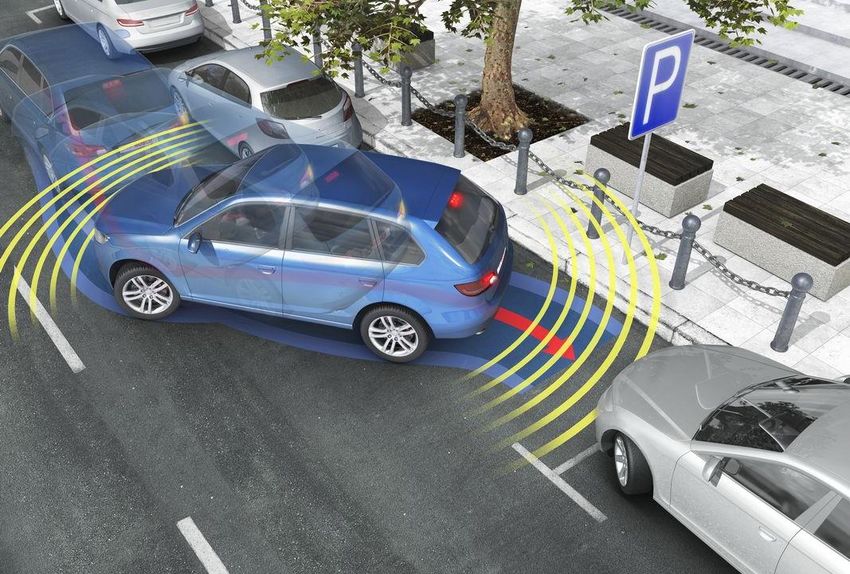
Die Geschichte des Automobils 1886: Carl Benz bringt das erste „Auto“ auf den Markt. Es gilt: „Driver only“. 1968: Wiener Übereinkommen: Jeder Fahrer muss sein Fahrzeug beherrschen. Mitte 60er: Erste Fahrassistenzsysteme: Tempomat und ABS. 1995: Mehrere FAS in einem: ESP verhindert Schleuderunfälle. 2016: Wiener Übereinkommen wird gelockert: Teilautonome Systeme sind zugelassen. 20??: Selbstfahrende Autos Quelle: Buhmann,B.: bfu-Forum Selbstfahrende Autos, 2016

Passive Systeme Aktive Systeme
Unfallfolgenminderung Unfallvermeidung
> Kopfstützen > Antiblockiersystem ABS
> Sicherheitsgurte > ektr. Stabilitäts-Programm ESP
> Airbag > Abstandsregler
> ... > Notbremsassistent
> Spurhalteassistent
13/06/2019 Passive und aktive Sicherheit 3
Klassifikation von FAS (Nach Maier, F., 2014,S.13, Darstellung bfu,2014)

Fahrerassistenzsysteme: verschiedene
Funktionen
Informierende Systeme → Information
Warnende Systeme → Bewertete Information
Assistierende Systeme → Ausgeführte, bewertete Information
Teilautomatisierte Systeme → Unvollständige Übernahme
Vollautomatisierte Systeme → Vollständige Übernahme
Fastenmeier, W. (2015). Fahrerassistenzsysteme (FAS) und Automatisierung im Fahrzeug: Wird daraus eine Erfolgsgeschichte? ZVS, 61(1), 21–27.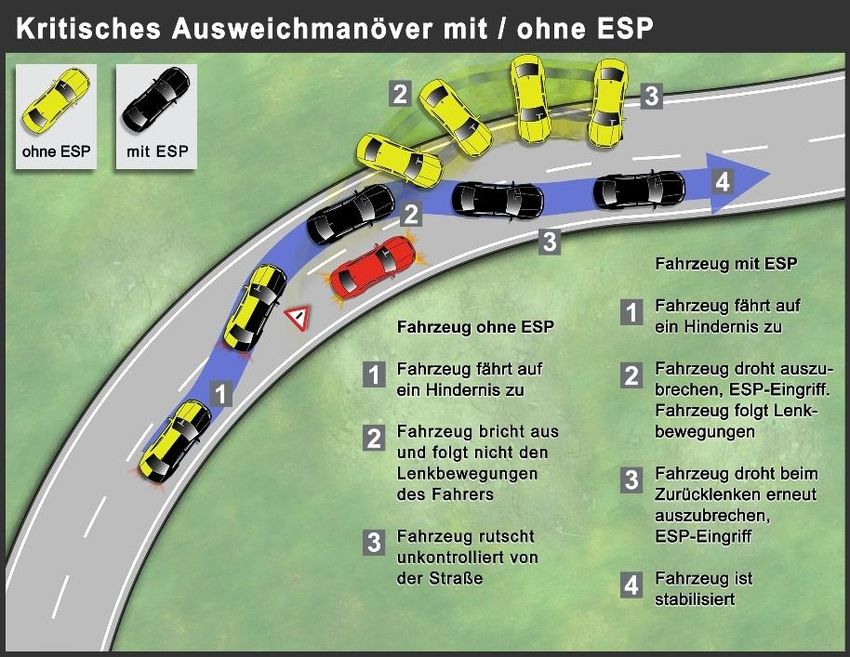
Fahrassistenzsysteme (FAS) Bilder:DVR
6
Abstandsregler ACC
Bild: bester-beifahrer.de
Vorausschauender Notbremsassistent
Bild: bester-beifahrer.de
Spurhalteassistent
Bild: bester-beifahrer.de
Spurwechselassistent 13/06/2019 10
Parkassistent
Bild: bester-beifahrer.deLichtsysteme
Abblendlicht dynamisches Kurvenlicht
zusätzliches Abbiegelicht links zusätzliches Abbiegelicht rechts
13/06/2019 Lichtsysteme – Funktion 12Lichttechnologie Abblendlicht mit Halogenleuchten Abblendlicht mit Xenoleuchten
Lichtassistent
Nachtsichtassistent 13/06/2019 15
Verkehrszeichenerkennung
Bild: bester-beifahrer.deStabilitätsprogramm ESP® 13/06/2019 17
ESP 13/06/2019 Stabilitätsprogramm ESP® – Funktion 18
Müdigkeitswarner
Abschätzung der Sicherheitseffekte (Rückgang Todesfälle 2010-2020 bei 100 % Ausstattungsrate) ESC (Electronic Stability Controll) - 16% ACC (Full Speed Range) - 2% EBR (Emergency Braking) - 7% LKS (Lane Keeping Support) - 15% DDM (Driver Drowsiness Monitoring +Warning) - 5% SPE (Speed Alert) - 9% Datenquelle: EU-Projekt eIMPACT, 2014
Sicherheitspotential von FAS Datenquelle: EU-Projekt eIMPACT, 2014, Darstellung bfu, 2016
Zukunft?
Bild links: Unsplash/Samuele Errico Piccarini | Bild rechts: caricos.com
22Central Power And Light Company (1957, 24. März). Power companies build for your new electric living (Werbeanzeige). The Victoria
Advocate. Verfügbar unter https://news.google.com/newspapers?nid=ZysSsiWj_g4C&dat=19570324&printsec=frontpage&hl=debfu – Beratungsstelle für Unfallverhütung
3 gute Gründe für selbstfahrende Autos
bfu-Forum 2016, Selbstfahrende Autos, Brigitte Buhmann 16.11.2016 2
4Stufen der Automation (Vollrath, 2016) Teilautomation: System fährt allein, Fahrer muss System ständig überwachen und jederzeit eingreifen können, wenn das System eine Situation nicht bewältigt. Hochautomation: System fährt zuverlässig in bestimmten Situationen alleine. Der Fahrer kann etwas anderes tun. System gibt frühzeitig Bescheid, wenn der Fahrer die Fahrt wieder übernehmen muss. Vollautomation (autonomes Fahren): Es gibt nur noch Passagiere, keine Fahrer mehr. Das Fahrzeug befördert Menschen oder Güter über bestimmte Strecken.
Klassifikation des Automatisierten Fahrens (Quelle: VDA,2015 Bast, Darstellung aus Uhr, BFU, 2016)
Stufen des Automatisierten Fahrens (Quelle: VDA, Ebner/ DVR Kolloquium , 2013)
Abschätzung des Unfallfallvermeidungspotentials durch Automatisierung (nur Personenschäden, die durch PKW- Fahrer verursacht werden) Basis 2010 = 100% 2020 = Rückgang auf 90 % 2050 = Rückgang auf 50% 2070 = nahezu vollständige Eliminierung Quelle: Unselt,T. et al.:zit. nach Uhr, bfu, 2016, S.17
Veränderung der Fahraufgabe bei Automatisierung Neue Aufgabenteilung zwischen Fahrzeug und Fahrer Fahren hat jetzt mehr überwachende, weniger regelnde Anteile. Einerseits wird er entlastet von einigen Aufgaben, andererseits stellt das (ständig notwendige) Überwachen eine hohe kognitive Belastung dar. Manuelles Fahren nur noch dann, wenn System an seine Grenzen stößt oder ausfällt.
Offene Fragen zum Automatisierten Fahren Verhaltensanpassung/Risikokompensation? Vielfach nachgewiesen. Unterforderung durch unterstützende FAS kann zu Nebentätigkeiten verleiten (z.B. bei LDW und ACC). Unbeabsichtigte Verhaltensänderungen können mögliche Sicherheitsgewinne gefährden. Fehlbeanspruchung ? Fahrer muss System (passiv) ständig überwachen und bei Systemausfall übernehmen. Daueraufmerksamkeit (Vigilanz) schwer zu erbringen. Überwachungstätigkeiten sind sehr fehleranfällig. „Ironie der Automatisierung“ (Bainbridge 1983)? Wegen seiner Fehleranfälligkeit wird Mensch aus dem Normalbetrieb herausgenommen- in kritischen Situationen soll er aber schnelle Expertenentscheidungen treffen. „Überforderung durch Unterforderung“
Prozessmodell der Verhaltensadaptation (Quelle: Weller&Schlag, 2004)
Offene Fragen zum Automatisierten Fahren Fehlendes Situationsbewußtsein? Exaktes Bild von der Gesamtsituation und ihrer Weiterentwicklung kann beim automatisierten Fahren verloren gehen, weil Fahrer aus dem Regelkreis genommen wird („out of the loop“). Falsches Systemverständnis/mentales Modell? Unrealistische Erwartungen an das System: „Blindes“ Vertrauen: Unkritisches Fahrverhalten; Kommandoeffekte z.B.: „Bitte wenden“. Rolle der Werbung: „Sie fahren wie auf Schienen“. Missbrauch des Systems. Ablenkung? Informationsdarbietende FAS können zu Ablenkungseffekten führen (z.B. Blick auf Display).
Offene Fragen zum Automatisierten Fahren Verlust vorhandener Fertigkeiten und Kompetenzen ? Verhinderung ihres Erwerbs (bei Fahrschülern/Fahranfängern) ? Übernahmeproblematik ? Erforderlich ist jederzeitiges Situationsbewußtsein (was passiert um mich herum ?) Welcher Zeitbedarf besteht ? Studien:10-15 Sek. ,aber auch 20 Sek. kamen vor , um das Fzg. aus einem entspannten Zustand heraus wieder selbst zu übernehmen. Akzeptanz für automatisiertes Fahren in der Bevölkerung ? Scheint bislang eher gering. Motivationale Hintergründe des Fahrens (Extramotive, Spaß am Fahren, psychosozialer Mehrwert des Fzg….) werden nicht mehr bedient.
Offene Fragen zum Automatisierten Fahren Probleme des „Mischverkehrs“ ? Falsche Erwartungen konventioneller Fahrer an automatisierte Fzg.? Bedeutung von Mimik/Gestik für Kommunikation ? Datenproblematik ? (wem gehören die Daten?) Angst vor Hackern, der Cloud, die Fahrzeuge in ihre Gewalt bringen- („virtuelle Steinewerfer“) (Schlag, 2018) Ethisch-moralische Fragen ? Wer entscheidet, wenn Unfall unvermeidbar ist (das System, also der Algorithmus, der Fahrer, der Zufall…)? Moralische Dilemmata. Haftungsrechtliche Themen. Anforderungen an die Infrastruktur ?
Assistenz oder Automatisierung ? Dem Menschen die normale Fahrtätigkeit nicht abnehmen. Assistenz statt Automatisierung (Schlag,2018). Automatisches Eingreifen wenn Fahrer überfordert ist (in Grenzsituationen z.B. durch Notbremsassistent). Automation in „einfachen“ ,speziellen Situationen (z.B. Einparken, Stau). Verhältnis Mensch –Maschine umkehren: Nicht der Fahrer übernimmt von der Maschine (wenn sie überfordert ist), sondern die Maschine vom Fahrer - wenn dieser überfordert ist (Adaptive Automation). Assistenzfunktionen, die bei Fehlern des Fahrers eingreifen, haben hohes Sicherheitspotential. Daher: „Kauft mehr Sicherheitssysteme “ (Vollrath, 2016)
Literatur Buhmann, B.: bfu-Forum „Selbstfahrende Autos“ 16.11. 2016-Bern Bainbridge, L. (1983): Ironics of Automation.Automatica,19(6),775-779 Ebner, H.-T.(2013):Motivation und Handlungsbedarf für Automatisiertes Fahren. DVR-Kolloquium Automatisiertes Fahren, Bonn,11.12.2013 EU-Projekt eIMPACT, Darstellung bfu, 2016 http://www.eimpact.info/download/eIMPACT_D9_D10_v2.0.pdf Fastenmeier, W. (2015). Fahrerassistenzsysteme (FAS) und Automatisierung im Fahrzeug: Wird daraus eine Erfolgsgeschichte? ZVS, 61(1), 21–27. Malone K, Wilmink I., Noecker G., Rossrucker K., Galbas R., Alkim T. Socio-economic Impact Assessment of Stand-alone and Co-operative Intelligent Vehicle Safety Systems (IVSS) in Europe2008. http://www.eimpact.info/download/eIMPACT_D9_D10_v2.0.pdf.
Literatur Maier F. Wirkpotentiale moderner Fahrerassistenzsysteme und Aspekte ihrer Relevanz für die Fahrausbildung. Korntal-Münchingen: Deutsche Fahrlehrer-Akademie e.V.; 2014. Maier, F., 2014,S.13, Darstellung bfu,2014 Schlag, B. (2018): Automatisiertes Fahren im Straßenverkehr- Offene Fragen aus Sicht der Psychologie. In: Zeitschrift für Verkehrssicherheit 2,2018 S.100-104 Uhr A. Automatisiertes Fahren. Herausforderungen für die Verkehrssicherheit. Bern:bfu – Beratungsstelle für Unfallverhütung; 2016. bfu-Grundlagen.DOI 10.13100/bfu.2.285.01 Uhr A, Schumacher A. Informationskonzept und Wissenstransfer Fahrerassistenzsysteme: Bestandsaufnahme und Empfehlungen. Bern: bfu – Beratungsstelle für Unfallverhütung; 2014.bfu- Grundlagen ISBN 978-3-906173-78-8 (PDF) .
Literatur Unselt T, Schöneburg R, Bakker J. Insassen- und Partnerschutz unter den Rahmenbedingungen der Einführung autonomer Fahrzeugsysteme. In: 9. VDI-Tagung Fahrzeugsicherheit – Sicherheit 2.0; 2013. Verband der Automobilindustrie VDA. Automatisierung. Von Fahrerassistenzsystemen zum automatisierten Fahren. Berlin: VDA; 2015. Darstellung aus Uhr, bfu –Grundlagen, 2016 Vollrath M. Automatisches Fahren – Gut für den Fahrer? bfu-Forum Straßenverkehr: «Selbstfahrende Autos – wird sich die Sicherheit automatisch erhöhen?» 16.11.2016; 2016; Bern. Weller, G.& Schlag, B.(2004):Verhaltensadaptation nach Einführung von Fahrerassistenzsystemen. In: B. Schlag (Hrsg.), Verkehrspsychologie.Mobilität-Verkehrssicherheit-Fahrerassistenz (S.351-370). Lengerich: Pabst
Fragen? Fragen ? Fragen ? Herzlichen Dank für Ihre Aufmerksamkeit . Allzeit gute Fahrt ! Referat Unfallprävention - Wege und Dienstwege Deutscher Verkehrssicherheitsrat (DVR) German Road Safety Council Jägerstraße 67 - 69 10117 Berlin Telefon: +49 30 2266771-24 Telefax: +49 30 2266771-29 praevention@dvr.de www.dvr.de/praevention
Kommen Sie gut nach Hause!
Referat Unfallprävention - Wege und Dienstwege
Deutscher Verkehrssicherheitsrat (DVR)
German Road Safety Council
Jägerstraße 67 - 69
10117 Berlin
Telefon:+49 30 2266771-24
Telefax: +49 30 2266771-29
praevention@dvr.de
www.dvr.de/praevention
© Deutscher VerkehrssicherheitsratSie können auch lesen