Geodatensatz Bathymetrie Brienzersee Technischer Bericht
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Geodatensatz Bathymetrie Brienzersee Technischer Bericht Informationen zur Datenerhebung und zur Datenprozessierung Für den Brienzersee wurde ein neues, detailliertes Geländemodell des Seegrundes erstellt. Als Grundlage dienen zwei Datensätze aus je einer Echolot- und einer LIDAR-Vermessung. Die beiden Datensätze wurden anschliessend miteinander verrechnet. Aus den bereinigten und plausibilisierten Rohdaten wurde ein 1x1m-Raster und daraus der Geodatensatz BATHYBRI generiert. Die Echolotaufnahmen wurden von Mitarbeitenden des Instituts für Geologie der Universität Bern mit einem Fächerechlot im Mai 2018 durchgeführt. Die LIDAR-Daten für die Flachwas- serzone wurden von der Firma Airborne HydroMapping AHM GmbH, Innsbruck, erhoben und ausgewertet. Der Vermessungsflug fand am 28. März 2019 statt. Details zu beiden Er- hebungen finden sich in diesem Dokument. Die Zusammenführung der beiden Datensätze erfolgte durch AHM GmbH mit Unterstützung der Uni Bern und Swisstopo. Finanzierung Folgende Institutionen haben sich an der Finanzierung beteiligt: - Renaturierungsfonds RenF des Kantons Bern - swisstopo - Bundesamt für Umwelt BAFU - Amt für Wasser und Abfall des Kantons Bern - Tiefbauamt des Kantons Bern - Archäologischer Dienst des Kantons Bern - BKW Ökofonds Münsingen, Februar 2020
Institut für Geologie
Quartärgeologie und Paläoklimatologie
Bathymetriedaten Brienzersee 2018 (Version 1.0)
Dieser Bericht dokumentiert den bathymetrischen Datensatz Brienzersee 2018 (Version 1.0). Die Daten wurden
während einer Messkampagne im Mai 2018 mit einem Fächerlot von einem Boot aus aufgenommen und decken die
Bereiche des Brienzersees mit einer Wassertiefe von mehr als 5 m ab und den Aare Abflusskanal bis zur
Schiffsstation Interlaken Ost. Das verwendete Messsystem besteht aus einem Fächerlot Kongsberg EM2040 zur
Tiefenmessung mit einem Fächer von mehreren hundert fokussierten „Schallstrahlen“ sowie weiteren Sensoren zur
Bestimmung von Position und Orientierung der Messplattform sowie der Schallgeschwindigkeiten im Wasser. Die
Aufnahme des Seebodens mit einem Fächerlotsystem erfolgt in der Regel anhand von mehr oder weniger parallelen
Messstreifen mit Überlappungsbereichen. Der Verlauf der Messstreifen wird üblicherweise hangparallel gewählt, da
die Aufnahmebreite bei geringerer Wassertiefe deutlich abnimmt (Abb. 1). Dies erlaubt bei einer Rate von bis zu
einigen tausend gemessenen Tiefenpunkten pro Sekunde eine lückenlose Abdeckung des vermessenen Gebiets. Bei
der Datenprozessierung wird aus den ermittelten Grössen (Tiefenpunkte: Laufzeit, Winkel; Messplattform: Position,
Orientierung; Wassersäule: Schallgeschwindigkeitsmodell) über mehrere Schritte ein bathymetrischer
Rasterdatensatz mit einer Zellengrösse von 1 m gewonnen (Abb. 2). Dieser liegt in Landeskoordinaten (LV95) vor
und gibt die Höhe des Seebodens im Höhensystem LN02 an. Im Folgenden werden wesentliche Informationen zur
Messkampagne, zu den Prozessierungsschritten sowie zu den Produkten in Stichworten zusammengefasst.
Bathymetrische Aufnahme Mai 2018
Zeitraum der Kampagne: 15.05.2018 – 29.05.2018 (10 Messtage, 2 Tage Installation/Deinstallation);
Durchführung: Quartärgeologie und Paläoklimatologie, Institut für Geologie, Universtität Bern;
Messboot: „Arethuse“ (ETH Zürich), für die Dauer der Messungen bei der Schiffstation Interlaken Ost der BLS
stationiert;
Fächerecholot: Kongsberg EM2040 (Beamöffnung 1°x1°, Frequenz 300 kHz, 400 Tiefenwerte pro Schallpuls), max.
Fächeröffnungswinkel 150° (75° je Seite), Bedienung über Kongsberg SIS;
Positionierung: Leica GX 1230+ GNSS mit swipos GIS/GEO (RTK, VRS) in Echtzeit über mobile Internetverbindung,
ohne Transformation („LV95-LHN95“), Aufzeichnung Beobachtungsdaten zur Kontrolle/Ergänzung mit swipos PP;
PPS-Puls des GNSS-Empfängers zur Zeitsynchronisation der verschiedenen Geräte;
Orientierung Messboot: Bewegungssensor (Inertialnavigation) Kongsberg Seatex MRU5+ und GPS-Kompass Trimble
SPS361 mit 2 m Antennenabstand;
Schallgeschwindigkeitssensoren: Valeport MiniSVS (Wasseroberfläche), Valeport MiniSVP, 500m (Profil).
Abbildung 1: Gefahrene Linien der Messkampagne Mai 2018 und Positionen, Farbe nach Datum der Messung. Punkte zeigen Positionen der gemessenen Schallgeschwindigkeitsprofile (Farbe entspricht dem zugehörigen Datum). Abbildung 2: Darstellung des Datensatzes als farbiges, schattiertes Relief (Beleuchtung 315/45). Die Farben sind nach Tiefe kodiert und beziehen sich auf ein 75-jähriges gemitteltes, gerundetes Seespiegelreferenzniveau von 563.8 m über Meer. 2/9
Das mobile Fächerlotsystem wurde für die Dauer der Messungen auf dem Forschungsboot „Arethuse“ installiert.
Sämtliche Sensoren des Systems inklusive Schallgeber und –empfänger (Transducer) des Echolots befinden sich an
einer starren Aufhängung mit fixen, bekannten Relativpositionen (Abb. 3). Zu Beginn und zum Ende der
Messkampagne wurden eine Einmessung der Wasserlinie am Boot sowie eine Kalibration mittels „patch test“ zur
Feststellung von Winkelverdrehungen der Sensoren vorgenommen. Die Schallgeschwindigkeit an der
Wasseroberfläche wurde während der Aufnahme kontinuierlich gemessen. Vertikale Profile der
Schallgeschwindigkeit wurden üblicherweise mehrmals täglich ermittelt, um für die verschiedenen Messgebiete und
–perioden ein repräsentatives Geschwindigkeitsmodell zu erhalten (Abb. 1 und 4). Informationen zur
Schallgeschwindigkeit wurden bereits während der Datenaufnahme zur Qualitätskontrolle angewendet und bei der
späteren Prozessierung optimiert.
In den tiefsten Bereichen des Sees wurde bei guten Verhältnissen ein Fächeröffnungswinkel um 48° je Seite
(entsprechend einer Abdeckung von je etwa 80 m zu beiden Seiten) gewählt. In flacherem Wasser wurde der
Fächeröffnungswinkel graduell vergrössert (wobei sich die Abdeckung durch die geringeren Wassertiefen
verringert). In sehr geringen Wassertiefen um 5 m wurde der Fächer nach Möglichkeit bis zum maximalen Winkel
von 75° geöffnet. Bei schlechteren Messbedingungen (z.B. starker Wellengang, Seegrund mit geringer
Rückstreuung, starke Variabilität der Schallgeschwindigkeiten) wurde der Öffnungswin kel verringert. Typische
Pulsraten sind 5 Hz in tieferen Bereichen und bis zu 20 Hz in sehr flachem Wasser, wobei bis zu 400 Tiefenwerte pro
Puls aufgenommen werden. Die Aufnahme der Messstreifen erfolgte bevorzugt blockweise, wobei allerdings
versucht wurde, Leerfahrten zu minimieren. Einige Bereiche, bei denen visuelle Kontrollen während der Aufnahme
Datenlücken oder Probleme bei der Datenqualität vermuten liessen, wurden am letzten Messtag erneut erfasst (vgl.
Abb. 1). Insgesamt wurden in 229 Messlinien mit einer Gesamtlänge von 485 km bei einer durchschnittlichen
Geschwindigkeit von 2.95 Metern pro Sekunde 338 Millionen Tiefenpunkte erfasst. Daneben wurden 25
Schallgeschwindigkeitsprofile aufgezeichnet (Abb. 4).
Abbildung 3, oben links: Ein-/Auswassern des
Messbootes „Arethuse“ bei der Seepolizei bei Bönigen;
oben rechts: Aufbau des Fächerecholots bei der
Anlegestelle Schiffsstation Interlaken Ost; unten links:
„Arethuse“ mit installiertem Fächerlotsystem im
Kleinboothafen Biel. Wesentliche Komponenten des
Systems sind bezeichnet.
3/9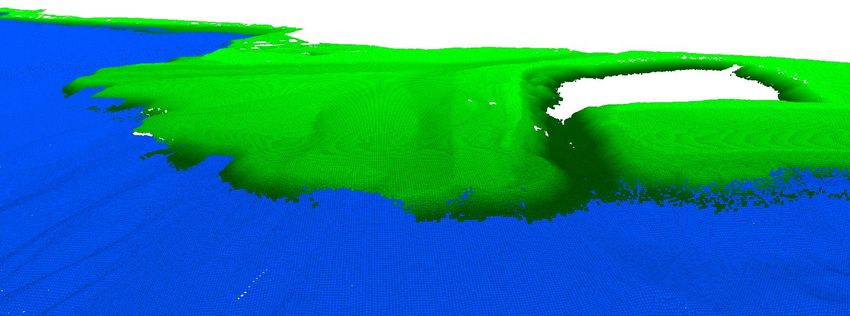
Abbildung 4: Schallgeschwindigkeitsprofile, welche während der Kampagne gemessen wurden (nur oberste 50 m); die Farbgebung nach Datum entspricht jener in Abbildung 1. Datenprozessierung Die Prozessierung (Korrekturen, Berechnungen und Zusammenfügen) der Rohdaten (Sensordaten, für das Echolot z.B. Laufzeiten und Winkel) in ein Tiefenmodell (Rasterdatensatz) erfolgt in mehreren Schritten, von denen die wichtigsten nachfolgend zusammengefasst sind. Ein Teil der Prozessierungsschritte wird bereits während der Aufnahme zur Steuerung und zu einer ersten Qualitätskontrolle automatisiert ausgeführt und im Rahmen der Nachbearbeitung optimiert. Software für Prozessierung: Caris HIPS/SIPS 10.4; Korrektur Positionsdaten: Verwendung von Echtzeitdaten, visuelle Kontrolle, Identifizierung und Interpolation fehlerhafter Positionen; bei Überprüfung mittels postprozessierten Positionen (GNSS-Beobachtungsdaten und Daten der Referenzstation Neuchatel des AGNES-Netzes von swisstopo) wurden keine wesentlichen Differenzen festgestellt; Schallgeschwindigkeitskorrektur: Aus den gemessenen Laufzeiten und Winkeln wird unter Berücksichtigung der Refraktion in horizontal geschichtetem Wasserkörper eine Position der Tiefenpunkte berechnet; die Wahl der passenden Geschwindigkeitsprofile im Rahmen der Prozessierung erfolgt manuell nach Zeitpunkt, Ort sowie Schallgeschwindigkeit an der Wasseroberfläche und wird in mehreren Iterationen mit anschliessender visueller Kontrolle des Resultats optimiert; Höhenbezug: Wasserstandsdaten der Station „Brienzersee, Ringgenberg“ des Basismessnetzes Oberflächengewässer des BAFU (LH2023) wurden für die Transformation der gemessenen Wassertiefen auf ein Referenzniveau von 563.8 m (LN02; entsprechend dem langjährigen gerundeten Mittel 1941-2016) verwendet, das Referenzniveau wurde für die Berechnung der LN02-Höhen verwendet; bei diesem Vorgehen wird implizit angenommen, dass die Seeoberfläche in Ruhe zu einem beliebigen Zeitpunkt eine konstante LN02-Höhe aufweist; eine Überprüfung mittels gemessener GNSS-Höhen (Mittel über die gesamte Kampagne) ergibt keinen systematischen Versatz; 4/9
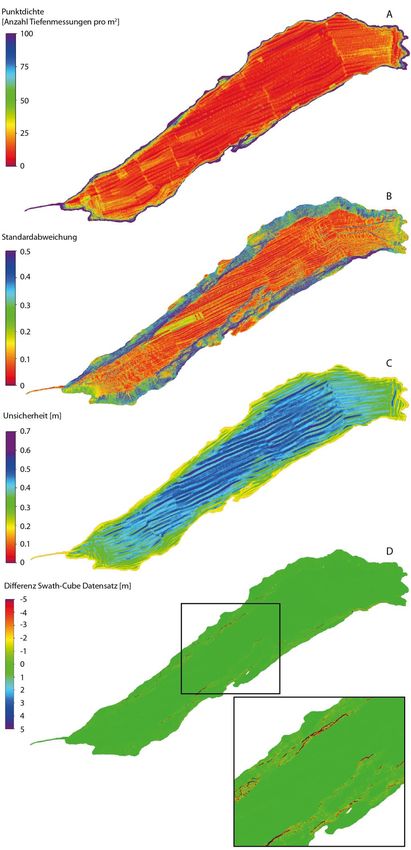
Säuberung Fehldaten: Anhand von Darstellungen (hauptsächlich Reliefschattierungen von Rasterdaten) wurden Stellen mit Fehldaten identifiziert; mutmasslich fehlerhafte Tiefenpunkte in der Punktwolke (z.B. Echos aus der Wassersäule, unzureichende Bodenerkennung, falsche Schallgeschwindigkeiten) wurden flächenhaft manuell oder mit statistischen Methoden markiert und für die weiteren Schritte verworfen; auf eine vollständige manuelle Säuberung sämtlicher Tiefenpunkte wurde verzichtet; Berechnung Rasterdaten: Aus den verbleibenden Tiefenpunkten wurde unter Berücksichtigung des beschallten Bereichs („footprint“) und mit Gewichtung nach Beamwinkel im Fächer („swath angle surface“ in der Software Caris) ein Rasterdatensatz in UTM Koordinaten mit einer Rasterweite von 1 m berechnet; für einzelne leere Zellen oder kleinere Lücken wurde die Tiefeninformation aus direkt benachbarten Zellen interpoliert (max. 5x5 Zellen); eine Glättung oder ähnliche Operationen wurden nicht durchgeführt; Bearbeitung Rasterdaten: Keine Objekte oder Ähnliches wurde maskiert. Eine einzelne grössere Lücke von 40 m x 17 m konnte trotz mehrmaligem Interpolieren (4x) benachbarter Zellen nur auf 25 m x 7 m verkleinert werden. Weiteres Interpolieren hätte den Datensatz an betroffener Stelle zu stark verfälscht. Abdeckung, Qualität Der resultierende Datensatz umfasst generell das Becken des Brienzersees bis zu einer minimalen Wassertiefe von < 5 m (bezogen auf das Referenzniveau, Abb. 5). Die Minimaltiefe von 5 m konnte beim Lütschine Delta (trübes Gewässer), bei Unterschwand (Ufersteilheit), bei Giessbach (Bäume, Felsen, Wasserfall), beim Aaredelta (Trübheit), beim Seegärtli (bei Brienz, Boienfeld), bei Ebligen (Delta) entlang kurzer Uferabschnitten nicht erreicht werden; hier erreicht der Datensatz mehrheitlich 5 - 10 m Wassertiefe. Abbildung 6A zeigt für den Datensatz die erreichten Punktdichten je Rasterzelle, die Standardabweichungen (6B) der Tiefenwerte je Zelle sowie die Unsicherheit (6C), welche aus Genauigkeitsangaben der gemessenen Parameter berechnet wird. Typische Punktdichten pro Zelle liegen in grösseren und mittleren Wassertiefen zwischen 5 und 25, während sie im Flachwasser oft deutlich über 100 liegen. Die Standardabweichung der Tiefenwerte in Überlappungsbereichen der Messstre ifen in flachen Gebieten ist meist geringer als 0.1 m und nur in wenigen Zonen etwas höher (0.1 – 0.2 m). Ausserdem ist die Standardabweichung naturgemäss an steilen Hängen sowie in morphologisch stark strukturierten Gebieten erhöht, wobei dies hier nicht mit der Datenqualität zusammenhängt. Die berechnete Unsicherheit beträgt im Flachwasser um 0.2 m und erhöht sich in mittleren bis grösseren Wassertiefen auf 0.4 bis 0.5 m sowie für einzelne Bereiche mit einer geringen Dichte von Tiefenpunkten, die zudem in den äusseren Fächerbereichen liegen, auf 0.4 m. Nebst dem typischen Swath Angle Algorithmus zur Berechnung der Raster, auf dessen Basis auch die Bearbeitung der Rasterdaten basiert, wurde ein alternativer Algorithmus „Cube Surface“ (combined uncertainty and bathymetry estimator) testweise berechnet. Die Differenz der beiden Raster ist in Abbildung 6D und zeigt nur minimale Unterschiede im Bereich sehr steiler Hänge. Deshalb wurde nur der Swath Angle basierte Algorithmus für die Finalisierung des Datensatzes verwendet. 5/9
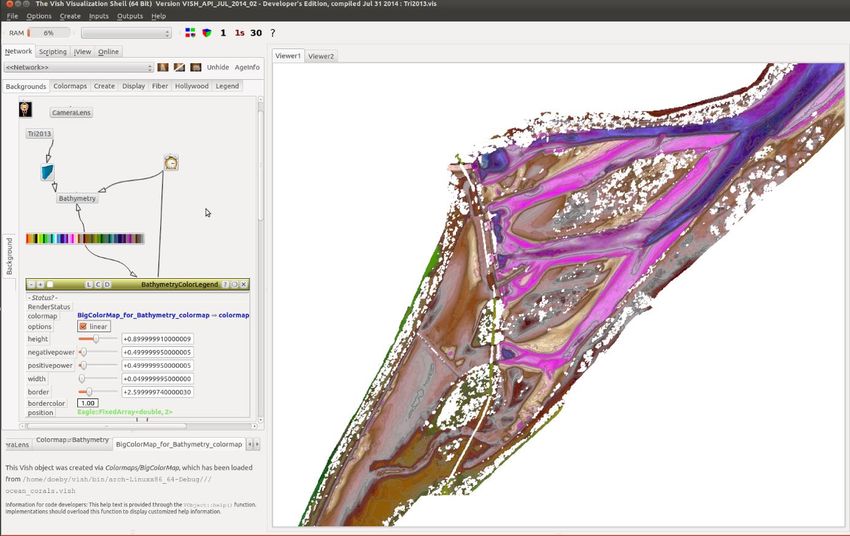
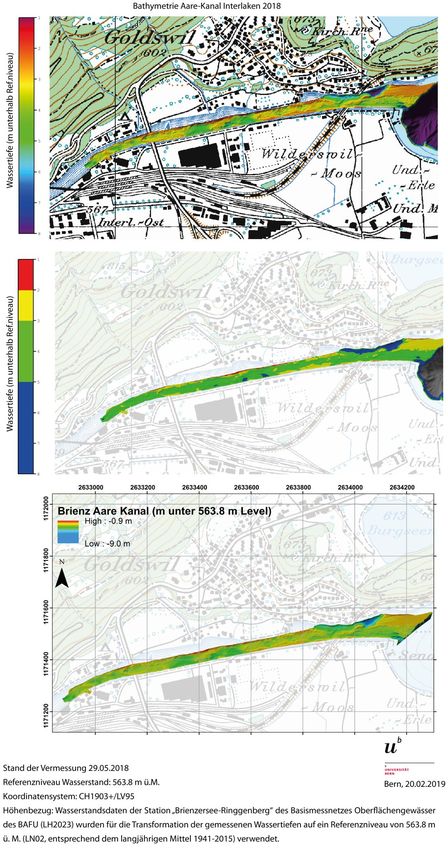
Abbildung 5, oben: Flachwasserzonen (grün: 5.01 - 10 m, rot 5 - 0.9 m), nicht vermessene Flachwasserzonen sind in weiss gehalten; unten links: Datenabdeckung 5 - 0.9 m Wassertiefe; unten rechts: Datenabdeckung 10 – 0.9 m Wassertiefe. 6/9
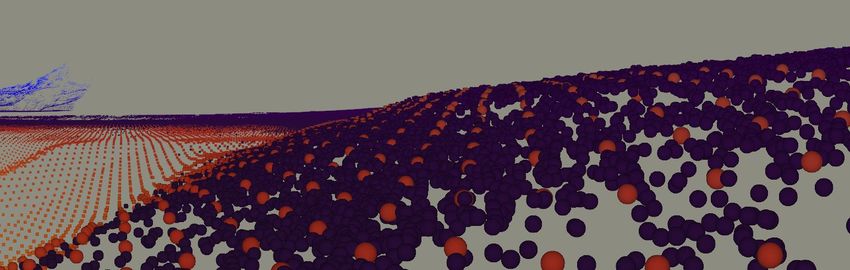
Abbildung 6, A: Punktdichte;
B: Standardabweichung der
Tiefenpunkte in einer
Rasterzelle; C: berechnete,
theoretische Unsicherheiten
der Bathymetriedaten;
D: Differenzkarte der
Bathymetrie zwischen „Swath
Angle“ and „Cube“ basierten
Tiefendaten.
7/9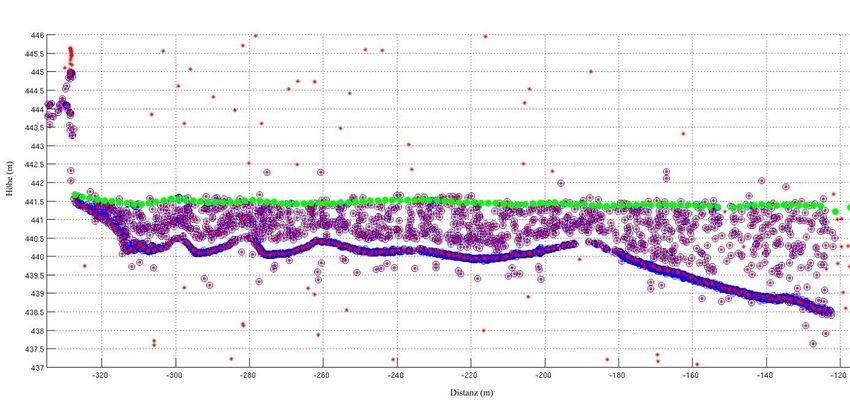
Produkte
Original aufgezeichneter Datensatz, der prozessiert wurde:
Dateiname: Brienz_3x3_1m_UTM32N_Swath_QC_interp5x5_6_4x_v1.0.asc
Format: ESRI ASCII
Zellengrösse: 1 m
Bezugsrahmen horizontal: UTM 32 N
Bezugsrahmen vertikal: Tiefe, Referenzniveau 568.3 m ü. M. (LN02)
Hauptprodukt: Rasterdatensatz LV95
Dateiname: brienz_3x3_1m_utm32n_to_lv95_swath_qc_interp5x5_6_4x_v1.0.asc
Format: ESRI ASCII
Zellengrösse: 1 m
Bezugsrahmen horizontal: LV95
Bezugsrahmen vertikal: Tiefe, Referenzniveau 568.3 m ü. M. (LN02)
Zusätzliche Bearbeitung: Reprojektion von UTM32N nach LV95 in ArcGIS 10 (Transformation
«CH1903+_To_ETRS_1989_1»)
Abgeleitetes Produkt: Rasterdatensatz LV95/LN02
Dateiname: Brienz_3x3_1m_utm32n_to_lv95_ln02_563_8_swath_qc_interp5x5_6_4x_v1.0 .asc
Format: ESRI ASCII
Zellengrösse: 1 m
Bezugsrahmen horizontal: LV95
Bezugsrahmen Höhe: LN02
Zusätzliche Bearbeitung: Reprojektion von UTM32N nach LV95 in ArcGIS 10 (Transformation
«CH1903+_To_ETRS_1989_1») + Addition von Referenzniveau auf Tiefenwerte, um LN02 zu erhalten
Bern, 15.07.2019
Stefano Fabbri
8/9
9/9
Airborne HydroMapping GmbH
Feldstr. 1b
Volkswirtschaftsdirektion des Kantons Bern A – 6020 Innsbruck
www.ahm.co.at
Amt für Landwirtschaft und Natur
info@ahm.co.at
Fischereiinspektorat
z.Hd. Janine Flühmann Contact Partner:
Schwand 17 DI Frank Steinbacher
+43 (0)512 / 31 90 70
3110 Münsingen
Schweiz
Projektbericht: Brienzer See & Thuner See –
28. März 2019
AHM-Team
Projekleitung Frank Steinbacher
Projektmanagement Ramona Baran
Datenprozessierung Manfred Niederwieser
Ramona Baran
Datum 11. Oktober 2019
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 2 von 26
Inhaltsverzeichnis
1. Technologie, Zielstellung und Projektgebiet 3
2. Methodik 5
2.1. Flug- und Messinstrumente 5
2.2. Messbedingungen 6
2.3. ALB-Datenprozessierung – Abbildung 4 7
2.3.1. Trajektorie, Kalibrierung, Streifenabgleich und Georeferenzierung 8
2.3.2. Softwarepeket HydroVISH 10
2.3.3. Klassifizierung der Punktwolke 11
Filterung von Fehlechos 11
Automatische Klassifizierung 13
Manuelle Klassifizierung 15
2.3.4. Wasseroberflächenmodell und Refraktion 16
Wasserspiegel und Wasseroberflächenmodell 16
Berechnung der Refraktion 19
2.3.5. Kombination ALB und Echolot zum digitalen Geländemodell 21
3. Literaturverzeichnis 25
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 3 von 26
1. Technologie, Zielstellung und Projektgebiet
Mit traditionellen Methoden der Gewässervermessung ist man kaum in der Lage,
hochauflösende und flächendeckende räumliche Daten der Flachwasserzone zu
erfassen. Zudem haben die Ergebnisse oftmals eine eher geringe räumliche Auflösung
und sind teuer und zeitintensiv. Im Gegensatz dazu ermöglicht das luftgestützte topo-
bathymetrische Laserscanning durch die Verwendung einer neuen Generation von
Laserscangeräten mit grüner Wellenlänge (532 nm) sehr genaue (± einige Zentimeter)
und sehr hoch auflösende (ca. 20-30 Punkte/m²) Vermessungen der Landoberfläche
und des Gewässerbettes in einem Messvorgang (Abb. 1).
Die neue Messtechnik, im folgenden auch ALB für Airborne Laser Bathymetry genannt,
und die daraus gewonnenen umfassenden räumlichen Informationen sind gegenüber
der bisherigen, meist querschnittsbasierten oder nur Teilflächen betrachtenden
Gewässervermessung eine deutliche Weiterentwicklung. Die Eindringtiefe des
Laserstrahls hängt u.a. wesentlich von der Trübung des Wasserkörpers ab: bei idealen
Sichtverhältnissen kann die Gewässersohle bis in eine Tiefe von max. ca. 10-11m
erfasst werden. Mit Hilfe einer vertieften Signalanalyse, der sogenannten Full Waveform
Analyse (FWF-Analyse) kann die Eindringperformance sogar noch um ca. 35%
gesteigert werden. Dies bedeutet jedoch einen höheren zeitlichen
Prozessierungsaufwand. Neben der erhöhten Eindringung können aber zudem noch
weitere Informationen aus den Daten mit Hilfe der FWF-Analyse, wie z.B. Trübung oder
Sohleigenschaften abgeleitet werden.
Im Vergleich mit topographischen Laserdaten ist die Signalform der Daten für den
Gewässerbereich komplexer (Abb. 1), weshalb an die Datenprozessierung
entsprechend höhere Ansprüche gestellt werden. Für Punkte unterhalb der
Wasseroberfläche, muss zudem eine Refraktion (Brechungs- und Laufzeitkorrektur)
durchgeführt werden, da sich der Laserstrahl durch zwei Medien (Luft und Wasser) mit
unterschiedlicher Geschwindigkeit bewegt. Zudem funktionieren klassische Ansätze
aus der Verarbeitung topographischer Laserdaten zur Klassifizierung bzw. Filterung im
topo-bathymetrischen Gewässerbereich nicht, so dass hier neue Algorithmen
entwickelt bzw. bestehende Algorithmen erweitert wurden.
Auf Grundlage einer Befliegung mittels grünem Laser entlang beider Uferlinien am
Brienzer und Thuner See (Abb. 2) sollen im Anschluss neue Geländemodelle beider
Seen in Kombination mit hochauflösenden Echolotdaten erstellt werden. Die
Echolotung am Thuner See wurde 2014 und am Brienzer See 2018 über die Universität
Bern durchgeführt.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 4 von 26
Abbildung 1 Messprinzip topographisches (links) und bathymetrisches (rechts)
Laserscanning aus der Luft.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 5 von 26
Abbildung 2 Übersicht zur topo-bathymetrischen Befliegung der Uferlinien am Brienzer
und Thuner See im März 2019.
2. Methodik
2.1. Flug- und Messinstrumente
Als Flugplattform diente ein zweimotoriges Flugzeug (Tecnam P2006T, Abb. 3). Im
vorderen Teil des Flugzeuges ist der Laserscanner VQ-880-NG (Riegl Laser
Measurement Systems) integriert. Das Gerät verwendet einen grünen Laser mit einer
Wellenlänge von 532 nm und bei der Datenaufnahme wurde mit einer Messfrequenz
von 550 kHz gearbeitet. Im hinteren Teil des Flugzeugs ist eine Luftbildkamera
(Hasselblad H/39) mit einer Brennweite von 35 mm und eine Wärmebildkamera
VarioCAM HD 900 (InfraTec, langwelliges Infrarot 0.75-1.4 μmm) integriert. Daten zur
Flugbahn werden über eine außen am Flugzeug befestigte GPS-Antenne (NovAtel
kompakte GNSS-Antenne 42G1215A-XT-1-2-CERT) und eine zusammen mit dem
Laserscanner installierten Inertial Measurement Unit (IMU, IGI Aero ControlIIe) mit einer
Datenrate von 256 Hz aufgezeichnet.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 6 von 26
2.2. Messbedingungen
Die Befliegung der Uferlinien am Brienzer See und Thuner See erfolgte am 28. März
2019 bei guten Mess- und Flugbedingungen: klare Sicht, teilweise bewölkt, leichter
Wind sowie klares Wasser. Lediglich im Bereich der Aare-Mündung am westlichen Ende
des Brienzer Sees gab es einen Trübungsschleier auf Grund der Schneeschmelze. Die
Vermessung dauerte ca. 3 Stunden von 10:45 bis 12:30 Uhr und 14:45 bis 15:45 (UTC)
und es wurden 136 Scanstreifen aufgenommen (= 68 Streifenpaare aus Vor- &
Rückstreifen; Abb. 2). Die Sohle an beiden Seen wurde dabei bis in eine Tiefe von ca.
8-10m erfasst und die generelle Sohlabdeckung ist als sehr gut zu bewerten.
Abbildung 3 (a) Flugzeug Tecnam P2006T (AHM GmbH); (b) hydrographischer
Laserscanner VQ-880-G (RIEGL LMS).
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 7 von 26
2.3. ALB-Datenprozessierung – Abbildung 4
Abbildung 4 Workflow zur ALB-Datenprozessierung.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 8 von 26
2.3.1. Trajektorie, Kalibrierung, Streifenabgleich und Georeferenzierung
Im ersten Schritt wird die Flugtrajektorie als wesentliche Grundlage für die weitere
Prozessierung der Laserdaten unter Verwendung der beiden Softwarepaketen
AeroOffice und GrafNav berechnet. Die während dem Flug aufgezeichneten GPS-Daten
werden im Post-Processing mit GPS-Basisstationsdaten korrigiert. Da die
Verdrehungen des Flugzeugs um die drei Rotationsachsen durch eine Inertial
Measurement Unit (IMU) während des Fluges aufgezeichnet werden, wird die finale
Trajektorie durch Kombination der GPS- und IMU-Daten berechnet. Die Genauigkeit
der Trajektorien am Brienzer und Thuner See liegt bei ±5-10 cm.
Die sogenannten Boresight-Parameter für eine Vermessungskampagne (= roll, pitch
und yaw-Winkel zwischen Laserscanner und IMU) werden auf Grundlage von separat
erhobenen Daten eines Kalibrationsfluges ermittelt. Ohne Ermittlung der Boresight-
Parameter können keine aussagefähigen Ergebnisse für den Streifenabgleich und die
Georeferenzierung erhobener Laserdaten gewonnen werden.
Die initiale Rohdatenprozessierung und erste Evaluierung der Laserdaten bzgl.
Eindringtiefe und Sohlabdeckung wird mit der Software HydroVISH (AHM GmbH)
durchgeführt unter Nutzung der final berechneten Flugtrajektorie und der derzeit
gültigen Boresight-Parameter. Im Anschluss erfolgt der sogenannte rigorose
Streifenabgleich, bei dem Positionsversätze zwischen den Scanstreifen korrigiert
werden und die ALB-Punktwolke auf einen Referenzdatensatz georeferenziert wird.
Hierfür wird ebenfalls die Software HydroVISH verwendet (siehe Abschnitt 2.3.2.). Für
die Georeferenzierung der ALB-Daten am Brienzer und Thuner See wurden die
klassifizierten Punkte für Gelände und Gebäude aus der ALS-Befliegung des Kantons
Bern als Referenzdatensatz verwendet. Im Ergebnis des Streifenabgleichs wurden die
Versätze zwischen den Scanstreifen und in Bezug auf den Referenzdatensatz im
Wesentlichen auf weniger als 8-10 cm minimiert, wie die kumulativen Histogramme
aller Differenzen in Abbildung 5 für den Brienzer See und in Abbildung 6 für den
Thuner See zeigen. Die Differenzbildung und Berechnung des kumulativen
Histogramms erfolgt auf Grundlage von 1x1 m Oberflächenmodellen aller Scanstreifen
und des Referenzdatensatzes bei Ausmaskierung von Vegetations- und
Gewässerflächen.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 9 von 26
Abbildung 5 Kumulatives Histogramm der Streifendifferenzen am Brienzer See nach
dem rigorosen Streifenabgleich und Georeferenzierung auf die ALS-Daten des Kanton
Bern.
Abbildung 6 Kumulatives Histogramm der Streifendifferenzen am Thuner See nach
dem rigorosen Streifenabgleich und Georeferenzierung auf die ALS-Daten des Kanton
Bern.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 10 von 26
2.3.2. Softwarepaket HydroVISH
Topo-bathymetrische Punktwolken haben einmal mehr die Anforderungen an eine sehr
flexible und Datenquellen unabhängige Softwarelösung zur Datenprozessierung und –
analyse erhöht. Eine Reihe weiterer Parameter muss dabei berücksichtigt werden, um
die Ergebnisse automatisierter oder auch semi-automatischer Analysen der
Punktwolken zu verbessern. Dazu gehören beispielsweise RGB-Werte aus Luftbildern,
räumliche Informationen zu Sediment- und Bodentyp, Werte zur Trübung des Wassers
während der Datenaufnahme, Wassertemperaturverteilung oder einfach nur
Wasserstand an einer Pegelstation und Gewässergrunddaten aus Echolotungen.
HydroVISH ist die einzige Softwarelösung zur Handhabung raumzeitlicher Daten
unabhängig von Datenformat und Menge an Datenattributen (Benger et al., 2007,
2017).
Für die durchgehende Datenspeicherung verwendet HydroVISH ein offenes,
transparentes, flexibles und dabei effizientes HDF5-basiertes Datenformat, das beim
Datenmanagement die Berücksichtigung von verschiedensten raumzeitlichen
Parametern in einem vereinheitlichten Datenmodell erlaubt. So können z.B.,
Punktwolken, Netze, Bilder und Linien in der gleichen Datei zu verschiedenen
Zeitpunkten und in unterschiedlichen Koordinatensystemen abgespeichert werden.
HDF5 wurde für Anwendungen im Bereich des High Performance Computing entwickelt
mit effizientem und portablem I/O großer Datenmengen. HydroVISH handhabt größer-
als-RAM Datenmengen via out-of-core Datenmanagement und unter Verwendung des
Grafikprozessors (GPU). Nicht-interaktive Batch-Anwendungen für wiederholte
Prozessierungsschritte ist genauso möglich wie die interaktive Datenanalyse bei
Nutzung der graphischen Nutzeroberfläche (Abb. 7). KomVISH, der
Visualisierungsableger von HydroVISH ermöglicht einen schnellen Datenzugang und
eine Kopplung mit GIS-Applikationen um die Datenmengen weiter verwalten zu
können.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 11 von 26
Abbildung 7 HydroVISH Nutzeroberfläche zur Erstellung von integrierten
Prozessierungsabläufen in einem Netzwerk.
2.3.3. Klassifizierung der Punktwolke
Filterung von Fehlechos
Für eine sinnvolle Klassifizierung der Punktwolke müssen Fehlechos (bzw. das
„Rauschen“) von den Messdaten abgetrennt werden (Abb. 8). Die Messoptik des
Laserscanners war während der Messkampagne an der über den Brienzer und Thuner
Seen besonders sensitiv eingestellt, um möglichst viele Signale von der
Wasseroberfläche aufzuzeichnen und die Eindringung in den Wasserkörper zu erhöhen.
Diese Sensoreinstellung führt dazu, dass besonders viele Echodetektionen stattfinden.
Diese werden beispielsweise durch Reflektionen des Laserstrahls an kleinsten Partikeln
in der Luft hervorgerufen und können z.B. durch hohe Luftfeuchtigkeit begünstigt
werden.
Zum Bereinigen der Fehlmessungen mit der Software HydroVISH wurde jeder
Datenpunkt hinsichtlich seiner Lage im Raum und hinsichtlich seiner Lage zu anderen
Punkten der Punktwolke untersucht. Dabei wurden Punkte, die sich mehr als 50 m über
der realen Geländehöhen und mehr als 50 m unterhalb des Gewässergrunds befinden,
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 12 von 26
von der Berechnung ausgeschlossen. Dadurch wurde die eigentliche Analyse auf den
relevanten Teil der Rohpunktwolke, den so genannten Space of Interest (SOI),
beschränkt.
Die Punkte innerhalb dieses SOI wurden nun einer Nachbarschaftsanalyse unterzogen
(Abb. 9). Hierbei wurden innerhalb eines definierten Radius um jeden Messpunkt die
Punktdichte (Anzahl der Punkte in der Nachbarschaft) und die Abstände zu den
Nachbarpunkten in Beziehung zueinander und zu definierten Schwellenwerten gesetzt.
Erfüllte ein Untersuchungspunkt die definierten Bedingungen (Schwellenwerte) nicht,
wurde er automatisch der Klasse „Fehlecho“ zugeordnet und vorläufig von der weiteren
Datenprozessierung ausgeschlossen. Die Klasse der Fehlechos blieb erhalten, um sie
für eine spätere manuelle oder automatisierte Klassifizierung und etwaige
Nachbesserungen nutzen zu können, da auf der Wasserseite oftmals Punkte als
Fehlecho klassifiziert wurden, die eigentlich zum Wasserkörper, dem Wasserspiegel
oder dem Gewässerboden gehören.
Abbildung 8 Querschnitt durch eine Punktwolke im Bereich einer Hafenanlage: Visuell
können Fehlechos und echte Daten klar voneinander getrennt werden.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 13 von 26
Abbildung 9 Nachbarschaftsanalyse in HydroVISH zur Klassifizierung von Fehlechos.
Der Suchradius r beschreibt den Radius der Nachbarschaftsanalyse (a). Das
Abstandskriterium D ist die Distanz, innerhalb der sich der nächstgelegene Punkt
befinden muss. Ein Dichtekriterium (nicht gezeigt) definiert die Mindestpunktdichte
innerhalb des Suchradius. Ein Punkt ist kein Fehlecho, wenn er innerhalb des
Suchradius r liegt, und das Dichtekriterium und der Abstand zum nächst gelegenen
Punkt L1 erfüllt wird. Die Kriterien sind ein Suchradius r = 0.75 m mit einem
Dichtekriterium von 5 Punkten innerhalb des Suchradius. Im Teilbild (b) ist der
untersuchte Punkt (hellgrün) kein Fehlecho, da das Dichtekriterium (Anzahl
dunkelgrüne Punkte) überschritten wird und diese Punkte innerhalb des Suchradius
liegen. In Teilbild (c) werden die Daten als Fehlechos (rot) klassifiziert, weil ihre
nächsten Nachbarpunkte zu wenig bzw. zu weit entfernt sind.
Automatische Klassifizierung
In einem ersten Schritt werden alle benachbarten Punkte eines jeden Punktes innerhalb
eines definierten Radius untersucht. Die tiefsten 5% und obersten 5% aller Punkte
werden nicht weiter berücksichtigt, da diese meist Ausreißer oder nicht relevante
Daten repräsentieren. Dann werden durch planare Regression Ebenen berechnet, die
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 14 von 26
am besten zu den Punkten und ihren Nachbarschaftskriterien passen (= Minimierung
des Abstandes zwischen Punkten und Ebenen mit Methode der kleinsten Quadrate).
Alle Punkte über der berechneten Ebene werden als nicht-Geländepunkt angenommen
und entsprechend klassifiziert. Dieser Prozess wird so lange iterative wiederholt bis
keine Neuklassifizierung von Punkten erfolgt. Im letzten Schritt der planaren
Regression werden alle Punkte, die unterhalb eines definierten Abstandes zur zuletzt
berechneten Ebene liegen als negative Ausreißer klassifiziert.
Da die nächsten automatischen Klassifizierungsschritte sehr rechen- und zeitintensiv
wären, wenn sie auf der gesamten Punktwolke angewendet würden, wird diese auf ein
0.5x0.5 m Raster abgebildet und die Klassifizierungsschritte werden auf das Raster der
Punktwolke angewendet. Nach Fertigstellung der Klassifizierung werden die Ergebnisse
der Rasterklassifizierung auf die Punktwolke übertragen.
Zunächst werden alle Rasterpunkte bezüglich ihrer Nachbarschaft untersucht und ihre
Shape-Faktoren berechnet. Dies sind Kriterien wie die Planarität, die genutzt werden
können, um einen bestimmten Punkt als Geländepunkt zu klassifizieren, oder ob/ob
nicht dieser Punkt zu einem Gebäude gehört. Somit werden alle Rasterpunkte, die nicht
die festgesetzten Schwellwertkriterien erfüllen, als nicht-Geländepunkte klassifiziert.
Die nicht-Geländepunkte werden einer weiteren planaren Regressionsanalyse
unterzogen und wieder als Gelände klassifiziert, wenn sie bestimmte
Schwellwertkriterien erfüllen. Dieser Schritt kann als Gegenprobe zu den bis hierhin
gemachten Klassifizierungsschritten verstanden werden, um Fehlklassifizierungen zu
minimieren.
Im Anschluss werden die klassifizierten Geländepunkte auf unvermittelte
Höhensprünge untersucht, um zu prüfen, ob sie nicht doch zu Dachflächen gehören,
die oftmals als Gelände klassifiziert wurden. Dies muss unter der Annahme korrigiert
werden, dass Dächer und Gebäude Objekte mit beschränkten räumlichen Grenzen sind.
In diesen lokalisierten Bereichen wird vom höchsten Punkt aus so lange extrapoliert,
bis alle Punkte des betreffenden Objektes ermittelt sind, oder bis ein definiertes
Abstandsabbruchkriterium erfüllt ist. Somit werden zwei Fälle unterschieden:
a) Alle Punkte einer Dach/Gebäude-Struktur sind durch die Extrapolation ermittelt
worden, bevor das Abstandsabbruchkriterium erreicht wurde, und werden daher
auch als solche klassifiziert.
b) Das Abstandsabbruchkriterium wird erreicht, so dass die betreffenden Punkte
als Geländepunkte gelten und nicht neu klassifiziert werden.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 15 von 26
Für die rasterbezogene Klassifizierung des Wasserkörpers inklusive Wasserspiegel wird
der gemittelte Reflectancewert (bzw. Intensitywert) verwendet.
Folgende Klassifizierungszuweisung erfolgt grundsätzlich:
- Gelände über Wasser bzw. Boden trocken Klasse 2
- Gelände unter Wasser bzw. Sohle Klasse 27
- Wasserspiegel Klasse 9.
Manuelle Klassifizierung
Bei der Analyse und Interpretation von 3D-Daten kann kein Algorithmus die
menschliche Fähigkeit der kognitiven Abstraktion und Antizipierung ersetzen. Daher
wird eine manuelle Korrektur der automatischen Klassifizierung durchgeführt, um die
Richtigkeit der Ergebnisse zu prüfen und die Datenqualität sicher zu stellen. Somit
werden die klassifizierten Punkte kontrolliert und wenn nötig korrigiert. Die Qualität
der automatischen Klassifizierungsergebnisse hängt stark von der generellen Qualität
der Rohpunktwolke ab. Letztere hängt einerseits hauptsächlich von den Wetter- und
Wasserbedingungen während der Befliegung und andererseits von den
morphologischen Gegebenheiten im Projektgebiet ab. Faktoren, die die Qualität der
automatischen Klassifizierung reduzieren sind: komplexe Geländemorphologie, dichte
Vegetationsbedeckung, sehr weite Bereiche mit sehr geringer Wassertiefe (0-20 cm),
hohe Trübung, Flussabschnitte mit Weißwasserbildung, Sohlmaterial mit starker
Lichtabsorption (Unterwasservegetation, organisches Material im Sohlsediment etc.).
Die manuelle Korrektur kann also diesbezüglich zeitaufwändig sein.
Das Vorgehen zur automatisierten Klassifizierung wie oben beschrieben wird ständig
weiterentwickelt, um den Zeitaufwand der manuellen Korrektur weitestgehend zu
minimieren. So konnte dies innerhalb der letzten Jahre drastisch reduziert werden
beispielsweise durch die Verwendung von Machine-Learning-Algorithmen.
Im finalen Schritt der Klassifizierung wird das Ergebnis der Rasterklassifizierung auf
die Punktwolke übertragen, wie oben bereits erwähnt, so dass die klassifizierte
Punktwolke für alle weiteren Datenanalyse- und Modellierungsabsichten verwendet
werden kann.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 16 von 26
2.3.4. Wasseroberflächenmodell und Refraktion
An der Grenzfläche zwischen Luft und Wasser wird der Laserstrahl reflektiert und
gebrochen, da sich Licht in Wasser ca. 25 % langsamer ausbreitet als in Luft (c Luft =
299.710 km/s, cWasser = 225.000 km/s). Bei der Brechungs- und Laufzeitkorrektur
(Refraktion) wird für alle Messpunkte unterhalb der Wasseroberfläche eine korrigierte
Tiefen- und Positionslage berechnet. Dafür muss zuerst die Wasseroberfläche zum
Zeitpunkt der Messung modelliert werden, bevor im Anschluss die Refraktion
durchgeführt wird.
Wasserspiegel und Wasseroberflächenmodell
Im Rahmen der Punktwolkenklassifizierung wurden alle Punkte klassifiziert, die den
Wasserkörper inklusive Wasserspiegel abbilden. Diese Punkte dienen als Grundlage zur
Modellierung der Wasseroberfläche und liegen in einem ca. 20-30 cm breiten Bereich
um den wahren Wasserspiegel, da nicht jeder ausgesendete Laserpuls zwingend die
Wasseroberfläche detektiert. Die beobachtete Streuung um die Wasseroberfläche hängt
dabei wesentlich von der Wassertiefe, dem Wellengang und der Trübung in der
Wassersäule ab (Abb. 10).
Zum Zeitpunkt der Messungen am Brienzer See und Thuner See herrschte geringer
Wind, so dass die Wasseroberfläche ruhig und verhältnismäßig glatt erschien. Bei einer
Laserfootprintgröße von 0.5 m wird somit ein homogenes Abbild der Wasseroberfläche
aus den Messdaten abgeleitet. Die geringe Auslenkung der Wasseroberfläche trug zu
einer sehr gleichmäßigen Verteilung der Wasseroberflächenpunkte bei, die für das
Wasseroberflächenmodell herangezogen werden (Abb. 11).
Das Wasseroberflächenmodell wird in solchen Fällen für die Refraktionsberechnung in
Elementgrößen von 1.5 m bis 5 m Kantenlänge aufgelöst (Abb. 12). Nur die obersten
Punkte der klassifizierten Wasseroberflächenpunkte (99%-Quantile) werden als gültige
Punkte für die Modellierung der Wasseroberfläche herangezogen (Mandlburger et al.
2013) und durch einen einzelnen Punkt ersetzt, der sich im Zentrum der Rasterzelle
befindet und die Höhe z = q0.99 besitzt. Für das Wasseroberflächenmodell werden die
so ermittelten Höhen der Rasterpunkte miteinander trianguliert, um damit die
Refraktion zu berechnen. Zusätzlich ist eine Extrapolation der Wasseroberfläche
notwendig, da in sehr seichten Gewässerabschnitten mit einer Wassertiefe kleiner als
15 cm die Wasserspiegellage mit der verwendeten Lasertechnologie nicht erfasst
werden kann (Abb. 10a). Das Wasseroberflächenmodell wird bis zur Uferlinie
ausgedehnt und dort mit dem Geländemodell zur Ermittlung der Wasseranschlaglinie
verschnitten.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 17 von 26
Abbildung 10 Die Streuung der Wasserspiegelpunkte ist abhängig von der Wassertiefe
(a), von der Form der Wasseroberfläche zum Messzeitpunkt (b) und der Trübung
innerhalb der Wassersäule (c). Erläuterungen: Der Laserscanner ist zugleich Sender und
Empfänger des ausgesendeten und empfangenen Laserpulses; 1) Zeitunterschied zu
klein, so dass keine Unterscheidung zwischen Wasseroberflächen- und Sohlecho
möglich ist (Tiefe ca. 15 cm); 2) Totalreflektion des Signals ist möglich; 3) kleine
Wellen sind gut zur Vermeidung von Totalreflektion; 4) starke Trübung reduziert die
Rückstreuenergie, Boden ist nicht detektierbar; 5) Größere Signaleindringung in den
Wasserkörper, bevor das erste Echo zurück gestreut wird; 6) stärkere Trübung ist gut
zur Detektion der Wasseroberfläche und schlecht für eine hohe Eindringung.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 18 von 26
Abbildung 11 Querprofil durch eine unklassifizierte Punktwolke (nur Wasserseite;
Messpunkte in rot/blau umrandet und Fehlechos in rot). Die grünen Punkte zeigen die
Lage des 99%-Quantiles, das auf einem 2x2 m Raster aller als Wasserkörper
klassifizierten Punkte berechnet wurde.
Abbildung 12 Beispielhaftes trianguliertes Wasseroberflächenmodell (magenta),
klassifizierte Wasserspiegelpunkte (blau) und digitales Geländemodell (nach Höhe
eingefärbt).
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 19 von 26
Berechnung der Refraktion
Bei der Refraktion wird für alle Geländepunkte (Sohle), die unterhalb der
Wasseroberfläche liegen, die eigentliche Tiefe und Lage berechnet. Als
Ausgangsdatensatz wird hierbei die Punktwolke mit dem Zeitstempel für jeden Punkt,
das triangulierte Wasseroberflächenmodell und die Flugtrajektorie mit dem Zeitstempel
für jeden Punkt benötigt. Prinzipiell wird zunächst ein Punktepaar mit gleichem
Zeitstempel – Punkt P aus der Trajektorie und Punkt Q aus der Punktwolke – sowie
deren Verbindungsvektor betrachtet (Abb. 13). Daraus wird der Punkt ermittelt, wo der
Strahl P-Q die Wasseroberfläche S schneidet (Abb. 13). Einerseits wird damit der
Strahlauftreffwinkel bestimmt, um den Strahl hinsichtlich Refraktionswinkel zu
korrigieren und andererseits wird die Strahllänge S-Q unter Wasser ermittelt, um die
Laufzeitkorrektur bezüglich Refraktionsindex anzubringen (Abb. 13). Mit dem
Refraktionsindex von 1.33 für Wasser und 1.000292 für Luft wird die Längenkorrektur
wie folgt berechnet:
Strahllänge unter Wasser x (1/Refraktionsindex Wasser) = Strahllänge unter Wasser x
0.75.
Die Winkelkorrektur wird mit dem Brechungsgesetz nach Snellius berechnet:
Refraktionsindex Luft x sin (Winkel zwischen Strahl in Luft & Wasseroberfläche) =
Refraktionsindex Wasser x sin (Winkel zwischen Wasseroberfläche & Strahl in Wasser).
In Abbildung 14 ist zur beispielhaften Veranschaulichung die Situation vor und nach
Durchführung der Refraktion dargestellt. Die korrigierten Sohlpunkte (in blau) liegen
nach der Refraktion deutlich oberhalb ihrer ursprünglichen Position ohne Anwendung
der Refraktion (in rot). Geländepunkte oberhalb des Wasserspiegels bleiben von der
Refraktion unberührt (Abb. 14).
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 20 von 26
Abbildung 13 Schematische Darstellung zur Berechnung der Refraktion (Erläuterungen
im Text).
Abbildung 14 Querschnitt durch eine Punktwolke vor (in rot) und nach (in blau)
Berechnung der Refraktion.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 21 von 26
2.3.5. Kombination ALB und Echolot zum digitalen Geländemodell
Für die Koordinatentransformation in das finale Schweizer Koordinatensystem LV95
mit LN02-Höhenbezug wurde die Software Reframe der Swisstopo verwendet. Durch
die Universität Bern wurden 2014 am Thuner See und 2018 am Brienzer See
hochauflösende Echolotdaten erhoben, die dem AN im Koordinatensystem LV95-LN02
als 1x1 m Raster übergeben wurden. Die beiden Echolotdatensätze wurden mit den
jeweils für den Thuner See und Brienzer See klassifizierten ALB-Geländepunkten über
und unter Wasser zu zwei digitalen 1x1 m Geländemodellen kombiniert.
Dabei werden zunächst die ALB-Geländepunkte über und unter Wasser auf ein 1x1 m
Raster abgebildet unter Verwendung der mittleren Höhe aller ALB-Geländepunkte je
Rasterzelle. Das 1x1 m ALB-Raster und das 1x1 m Echolot-Raster werden dann zu
einem 1x1 m Gesamtraster zusammengefasst unter Verwendung des Mittelwertes im
Überlappungsbereich zwischen ALB- und Echolot-Raster. Dieser Ansatz ist
zweckdienlich, da die klassifizierten ALB-Sohlpunkte und die Echolotdaten generell
eine gute Übereinstimmung zeigen (Abb. 14). Lediglich am Thuner See gibt es im
Bereich zweier Flussmündungen (Kander und Sundgraben markiert in Abb. 2) lokale
Stellen, wo die ALB-Sohlpunkte oberhalb der Echolotdaten liegen (Höhendifferenzen
mehr als 1 m, Abb. 15). Diese Unterschiede sind auf morphologische Änderungen
durch Sedimentation an der Deltafront im Zeitraum zwischen der Echolotung 2014 und
der ALB-Datenaufnahme 2019 zurück zu führen (Abb. 15). An diesen Stellen wurden
die tiefer liegenden, älteren Echolotdaten verworfen und nur die ALB-Sohlpunkte
verwendet (Abb. 15). Verbleibende Lücken zwischen den ALB- und Echolotdaten
beispielsweise bedingt durch Trübung an der Aare-Mündung in den westlichen
Brienzer See wurden zusätzlich auch linear interpoliert (Abb. 16 und 17).
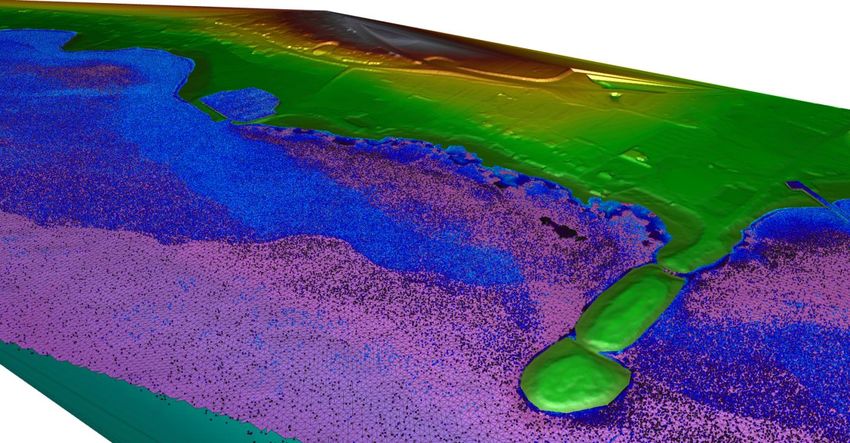
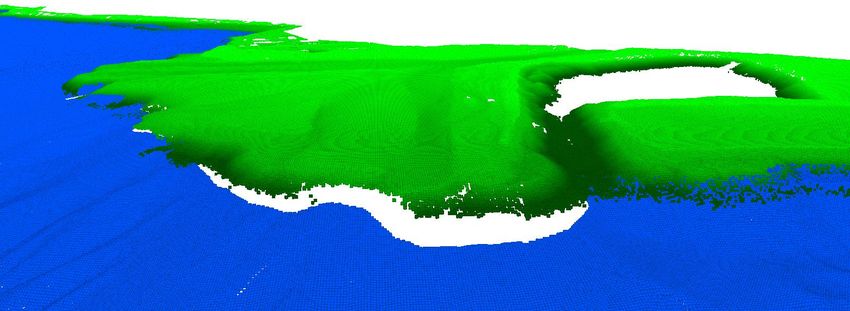
Abbildung 14 Datenverschneidung am Brienzer See aus klassifizierten ALB-
Sohlpunkten (dunkelblau) und Echolotdaten (rot) mit guter Übereinstimmung beider
Datensätze.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 22 von 26
Abbildung 15 Datenverschneidung am Thuner See aus klassifizierten ALB-Sohlpunkten
(grün) und Echolotdaten (blau) mit lokalen Abweichungen im Bereich des Kander-
Deltas durch Sedimentation an der Deltafront im Zeitraum zwischen der Echolotung
2014 und der ALB-Befliegung 2019.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 23 von 26
Abbildung 16 Gesamt-DGM des Brienzer Sees ohne (oben) und mit (unten)
Interpolation von Datenlücken zwischen ALB und Echolot.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 24 von 26
Abbildung 17 Gesamt-DGM des Thuner Sees ohne (oben) und mit (unten)
Interpolation von Datenlücken zwischen ALB und Echolot.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 25 von 26
3. Literaturverzeichnis
Aufleger, M., Steinbacher, F., Baran, R. and Woerndl, M., 2013: ‘Alpine Airborne
Hydromapping‘. In: The Ministry of Water Resources, P.R. China and International
Association for Hydro-Environment Engineering and Research (Ed.): 35th IAHR
World Congress. ISBN 978-7-89414-588-8.
Baran, R., Dobler, W., Steinbacher, F., Ritter, M., Niederwieser, M., Benger, W. and
Aufleger, M., 2013: ‘Verschneidung von Airborne Hydromapping und
Fächerecholotvermessung bei Rheinfelden‘. In: WasserWirtschaft - Fachzeitschrift
für Wasser und Umwelttechnik 9/2013, P. 18 - 25.
Benger W., Ritter G. & Heinzl R. (2007): The Concepts of VISH. 4th High-End
Visualization Workshop; Obergurgl, Tirol, Österreich, 18.-21. Juni 2007, S. 26–39;
Berlin, Lehmanns Media-LOB.de.
Daimon M. & Masumura A. (2007): Measurement of the refractive index of distilled
water from the near-infrared region to the ultraviolet region, Appl. Opt. 46, p.
3811-3820.
Dobler, W. et al. (2014): High resolution bathymetric lidar data as base for hydraulic
modelling of a mountain stream, International Conference on Hydroinformatics 2014,
New York, USA. Available at http://www.proceedings.com/25674.html
Hecht, E. & Zajac, A. (2003): Optics; Fourth Edition, Pearson Higher
Education, ISBN 978-0-321-18878-6.
Jocham S., Dobler W., Baran R., Aufleger M. & Steinbacher F. (2014) Einsatz hoch
genauer Bathymetriedaten aus luftgestützter Vermessung in der Abfluss- und
Habitatmodellierung. Österreichische Wasser- & Abfallwirtschaft, Vol. 66 Issue, 5-6,
S. 206-213.
Kedenburg S., Vieweg M., Gissibl T. & Giessen H. (2012): Linear refractive index and
absorption measurements of nonlinear optical liquids in the visible and near-
infrared spectral region. Opt. Mat. Express 2, p. 1588-1611.
Mandlburger G., Pfennigbauer M. & Pfeifer N. (2013): Analyzing near water surface
penetration in laser bathymetry - a case study at the river Pielach. ISPRS Annals of
the Photogrammetry, Remote Sensing and Spatial Information Sciences, Volume II-
5/W2, S. 175–180. Poster presentation: ISPRS Workshop Laser Scanning 2013,
Antalya, Türkei; 11.-13. November 2013.
Steinbacher, F., Pfennigbauer, M., Aufleger, M., and Ullrich A., 2010,
AirborneHydroMapping – Area wide surveying of shallow water areas. Proc. of 38th
ISPRS Congress, ISPRS.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Airborne HydroMapping GmbH
Seite 26 von 26
Steinbacher, F., Baran, R., Dobler, W., Aufleger, M. and Christiansen, L., 2013:
‘Combining Novel and Traditional Survey Technologies to Monitor Coastal
Environments: Airborne Hydromapping and Sonar Data along the Baltic Sea
Coastline, Schleswig-Holstein, Germany‘. In: The Ministry of Water Resources, P.R.
China and International Association for Hydro-Environment Engineering and
Research (Ed.): 35th IAHR World Congress. ISBN 978-7-89414-588-8.
Tilton, L.W., & Taylor, J.K. (1938): Refractive index and dispersion of distilled water for
visible radiation at temperatures 0 to 60°C; Journal of Research of the National
Bureau of Standards, Vol. 20, p. 419-477.
CEO: ZT Dipl.-Ing. Frank Steinbacher | Prof. Dr.-Ing. Markus Aufleger
Registernumber: FN 398330f | Court: Landesgericht Innsbruck
VAT(AT): ATU68023569 | VAT(DE): DE290333295
EasyBank BIC, IBAN: EASYATW1, AT061420020010926590
BankAustria: BIC, IBAN: BKAUATWW, AT881200052736064152Sie können auch lesen

















































