Antriebssystem SD2 EtherCAT-Anbindung - SIEB & MEYER - SIEB & MEYER ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
SIEB & MEYER
Antriebssystem SD2
EtherCAT-Anbindung
SD2
Antriebssystem
D-00000186.2
2021-02-02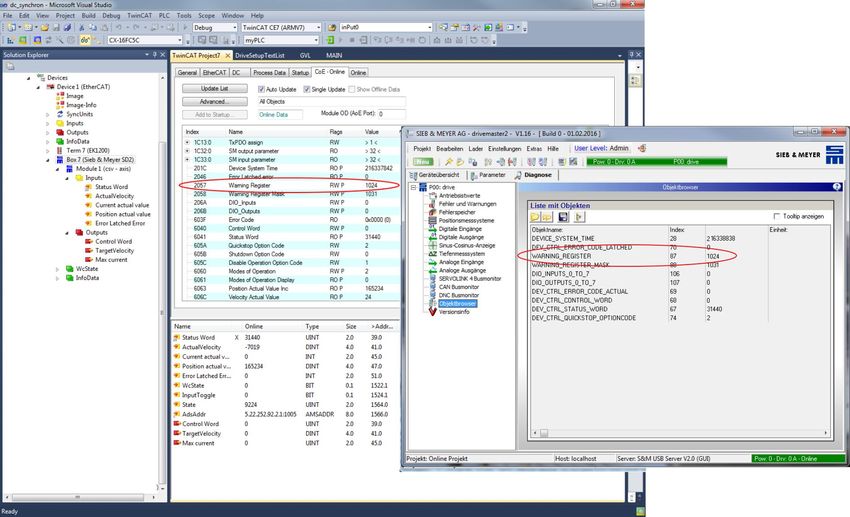
Copyright
Originalbetriebsanleitung, Copyright © 2021 SIEB & MEYER AG
Alle Rechte vorbehalten.
Diese Anleitung darf nur mit einer ausdrücklichen schriftlichen Genehmigung der SIEB
& MEYER AG kopiert werden. Das gilt auch für Auszüge.
Marken
Alle in dieser Anleitung aufgeführten Produkt-, Schrift- und Firmennamen und Logos
sind gegebenenfalls Marken oder eingetragene Marken der jeweiligen Firmen.
SIEB & MEYER weltweit
Bei Fragen zu unseren Produkten oder technischen Rückfragen wenden Sie sich bitte
an uns.
SIEB & MEYER AG
Auf dem Schmaarkamp 21
21339 Lüneburg
Deutschland
Tel.: +49 4131 203 0
Fax: +49 4131 203 2000
support@sieb-meyer.de
http://www.sieb-meyer.de
SIEB & MEYER Shenzhen Trading Co. Ltd.
Room A208 2/F,
Internet Innovation and Creation services base Building (2),
No.126, Wanxia road, Shekou, Nanshan district,
Shenzhen City, 518067
P.R. China
Tel.: +86 755 2681 1417 / +86 755 2681 2487
Fax: +86 755 2681 2967
sm_china_support1@163.com
http://www.sieb-meyer.cn
SIEB & MEYER Asia Co. Ltd.
4 Fl, No. 532, Sec. 1
Min-Sheng N. Road
Kwei-Shan Hsiang
333 Tao-Yuan Hsien
Taiwan
Tel.: +886 3 311 5560
Fax: +886 3 322 1224
smasia@ms42.hinet.net
http://www.sieb-meyer.com
Antriebssystem SD2 - EtherCAT-Anbindung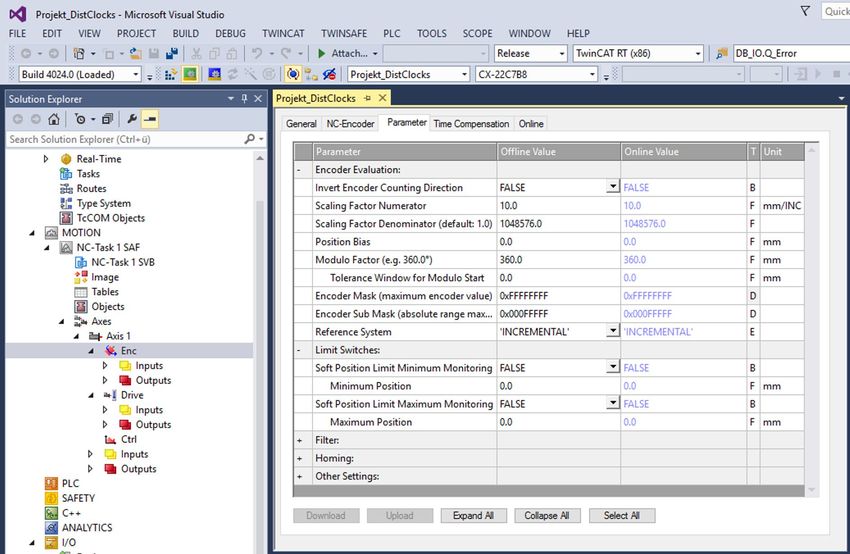
Inhaltsverzeichnis
Inhaltsverzeichnis
1 Über dieses Handbuch......................................................... 5
1.2 Darstellung von Zahlen...................................................................................... 5
1.3 Abkürzungen......................................................................................................5
2 EtherCAT-Netzwerk............................................................... 6
2.1 Adressierung......................................................................................................6
2.2 Prozessdatenbeschreibung (ESI-Dateien)........................................................ 6
3 Zyklische Prozessdaten (PDO) – Betriebsarten.................7
4 CSV-Mode.............................................................................. 8
4.1 Parametrierung.................................................................................................. 8
4.2 Zyklische Prozessdaten (PDO)..........................................................................9
4.2.1 RxPDO 0 (Sollwerte)...................................................................................................... 9
4.2.2 TxPDO 0 (Istwerte).........................................................................................................9
5 CSP-Mode............................................................................ 10
5.1 Parametrierung................................................................................................ 10
5.2 Zyklische Prozessdaten (PDO)........................................................................11
5.2.1 RxPDO 1 (Sollwerte).................................................................................................... 11
5.2.2 TxPDO 1 (Istwerte).......................................................................................................11
6 Homing Mode...................................................................... 13
6.1 Homing-Methoden........................................................................................... 14
6.1.1 Homing-Mode 1............................................................................................................ 14
6.1.2 Homing-Mode 2............................................................................................................ 15
6.1.3 Homing-Mode 3............................................................................................................ 15
6.1.4 Homing-Mode 4............................................................................................................ 16
6.1.5 Homing-Mode 5............................................................................................................ 16
6.1.6 Homing-Mode 6............................................................................................................ 17
6.1.7 Homing-Mode 10.......................................................................................................... 18
6.1.8 Homing-Mode 14.......................................................................................................... 19
6.2 Steuer- und Status-Bits....................................................................................19
6.2.1 Steuerwort (Control Word)............................................................................................19
6.2.2 Statuswort (Status Word)............................................................................................. 20
6.3 Homing-Funktion ausführen.............................................................................20
7 Objektverzeichnis............................................................... 21
0x1000 – Device Type (Gerätetyp).................................................................. 21
0x1001 – Error Register (Fehlerregister)......................................................... 21
0x1008 – Device Name (Gerätename)............................................................ 22
0x1009 – Hardware Version.............................................................................22
0x100A – Software Version..............................................................................23
0x1018 – Identity (Identität)............................................................................. 23
0x10F1 – Error Settings (Fehlereinstellungen)................................................ 24
0x1600/0x1601 – RxPDO Mapping................................................................. 25
0x1A00/0x1A01 – TxPDO Mapping................................................................. 26
0x1C00 – Sync Manager Type.........................................................................27
0x1C12 – RxPDO Assign (RxPDO-Zuordung)................................................ 28
0x1C13 – TxPDO Assign (TxPDO-Zuordung)................................................. 28
0x1C32 – SM Output Parameter (SM-Ausgangsparameter)........................... 29
0x1C33 – SM Input Parameter (SM-Eingangsparameter)...............................32
0x2046 – Error Latched Error (gespeicherte Fehlermeldung)......................... 34
0x603F – Error Code (Gespeicherte Fehlermeldung)..................................... 35
0x6040 – Control Word (Steuerwort)............................................................... 35
0x6041 – Status Word (Statuswort)................................................................. 35
0x605A – Quick Stop Option Code (Schnellhaltreaktion)................................ 36
Antriebssystem SD2 - EtherCAT-Anbindung 3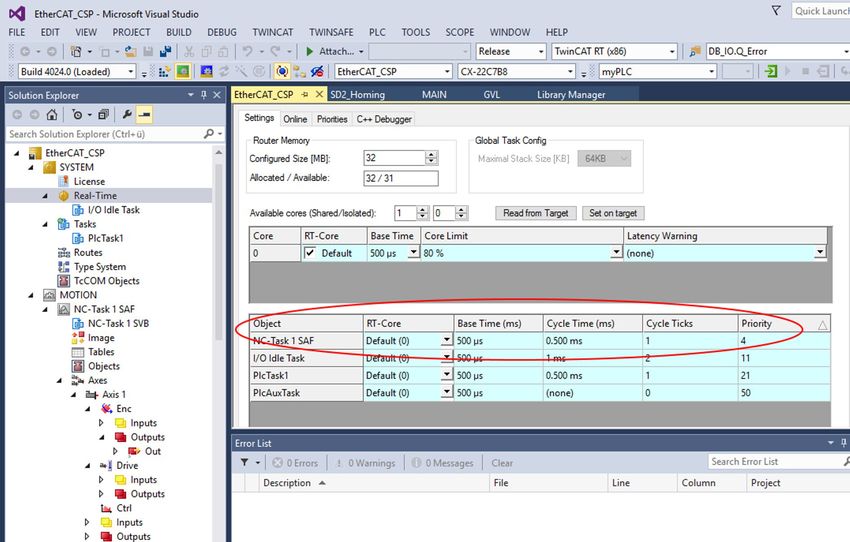
Inhaltsverzeichnis
0x605B – Shutdown Option Code (Abschaltreaktion)..................................... 37
0x605C – Disable Operation Option Code (Reaktion auf Betrieb sperren)..... 37
0x6060 – Modes of Operation (Betriebsarten).................................................37
0x6061 – Modes of Operation Display (Betriebsart auslesen)........................ 38
0x6063 – Position Actual Value Inc (Lageistwert)............................................39
0x6064 – Position Actual Value (Lageistwert)..................................................39
0x606C – Velocity Actual Value (Drehzahlistwert)........................................... 39
0x6073 – Max Current (Strombegrenzung)..................................................... 40
0x6075 – Motor Rated Current (Motornennstrom)...........................................40
0x6078 – Current Actual Value (Stromistwert).................................................40
0x607A – Target Position (Lagesollwert)......................................................... 41
0x6083 – Profile Acceleration (Beschleunigungsrampe)................................. 41
0x6084 – Profile Deceleration (Bremsrampe)..................................................42
0x6085 – Quick Stop Deceleration (Schnellhaltrampe)................................... 42
0x6098 – Homing Method................................................................................42
0x6099 – Homing Speeds................................................................................43
0x609A – Homing Acceleration........................................................................44
0x60B1 – Velocity Force Offset........................................................................44
0x60B2 – Torque Force Offset......................................................................... 44
0x60FD – Digital Inputs (digitale Eingänge).................................................... 45
0x60FE – Digital Outputs (digitale Ausgänge)................................................. 45
0x60FF – Target Velocity (Drehzahlsollwert)................................................... 46
8 Beispielkonfiguration......................................................... 47
8.1 TwinCAT-Installation........................................................................................ 47
8.2 drivemaster2 -Installation.................................................................................47
8.3 Parametrierung des Antriebs........................................................................... 47
8.4 SD2 am EtherCAT-Netzwerk einrichten...........................................................48
8.4.1 Zyklische Ereignisse auslösen..................................................................................... 49
8.4.2 Run Mode starten......................................................................................................... 52
8.4.3 Objektverzeichnis anzeigen..........................................................................................53
8.4.4 Objekte in drivemaster2 anzeigen................................................................................ 54
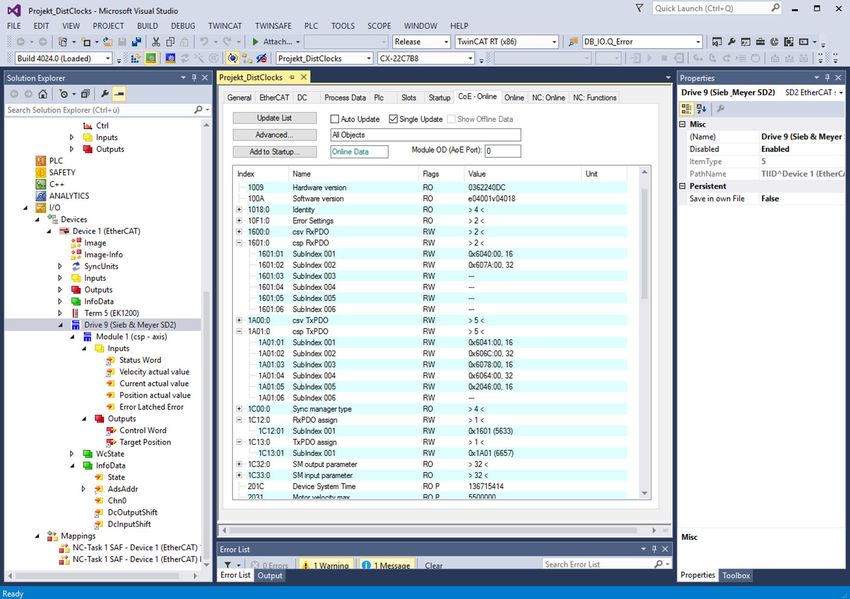
8.5 CSP-Beispielkonfiguration............................................................................... 55
8.5.1 Zykluszeiten einstellen................................................................................................. 55
8.5.2 Prozessdaten einstellen............................................................................................... 56
8.5.3 Startup.......................................................................................................................... 57
8.5.4 Objektbrowser.............................................................................................................. 58
8.5.5 Skalierungen.................................................................................................................59
8.6 Homing-Beispielkonfiguration.......................................................................... 60
4 Antriebssystem SD2 - EtherCAT-Anbindung
Über dieses Handbuch
1 Über dieses Handbuch
Das vorliegende Handbuch beschreibt die Ankoppelung der Geräteserie SD2
(03622XX) an das EtherCAT-Netzwerk. Informationen zur Geräteserie SD2 finden Sie
in der entsprechenden Hardware- bzw. Softwaredokumentation.
Eine grundlegende Beschreibung des EtherCAT-Netzwerks finden Sie auf der Website
der EtherCAT Technology Group (www.ethercat.org).
Der SD2 verwendet das Protokoll „CANopen over EtherCAT‟ (CoE). Das SERCOS-Pro-
tokoll (SoE) wird nicht von den SD2-Antrieben unterstützt. Die folgenden Normen sind
heranzuziehen:
▸ CiA: CiA Draft Standard Proposal DSP-402. Version 1.1. CANopen Device Profile
for Drives and Motion Control. Erlangen: CiA (CAN in Automation e.V.) 1998
▸ IEC-Standard: IEC 61158 (EtherCAT Technology Group)
▸ CANopen over EtherCAT (CoE)
1.2 Darstellung von Zahlen
In diesem Handbuch wird sowohl das dezimale Zahlensystem als auch das hexadezi-
male Zahlensystem verwendet.
Hexadezimale Zahlen werden grundsätzlich mit einem vorangestellten „0x‟ dargestellt.
Dezimale Zahlen können zur eindeutigen Unterscheidung mit einem tiefgestellt „D‟ ge-
kennzeichnet sein.
Es gilt: 0x6040 = 24640D = 24640
Zudem werden hohe Zahlen als Potenz ausgedrückt:
Potenz Dezimalwert Hexadezimalwert
32
(2 −1) 4.294.967.295 0xffffffff
31
(2 −1) 2.147.483.647 0x7fffffff
31
(−2 ) -2.147.483.648 0x80000000
1.3 Abkürzungen
CiA CAN in Automation
CoE CANopen over EtherCAT
CSP Cyclic Synchronous Position
CSV Cyclic Synchronous Velocity
ESI EtherCAT Slave Information
SoE SERCOS over EtherCAT
SPS speicherprogrammierbare Steuerung
Antriebssystem SD2 - EtherCAT-Anbindung 5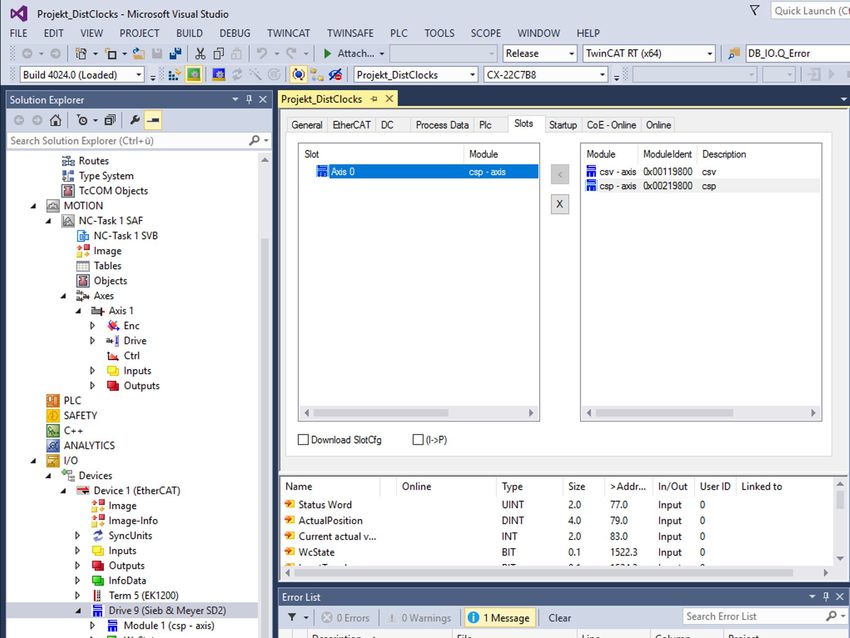
EtherCAT-Netzwerk
2 EtherCAT-Netzwerk
2.1 Adressierung
Beim EtherCAT-Netzwerk handelt es sich um eine ringförmige Netzstruktur. Der Bus ba-
siert auf dem Ethernet-Protokoll und wird mit handelsüblichen Cat-5-Netzwerkkabeln
verbunden.
EtherCAT-Netzwerk
im
Antriebsadressierung
1:
Abb.
Abb. 1: Antriebsadressierung im EtherCAT-Netzwerk
Die Adressierung der SD2-Antriebe innerhalb des EtherCAT-Netzwerks findet implizit
durch den EtherCAT statt. Die Einstellungen an den Adresswahlschaltern bzw. die Kon-
figuration der Moduladresse über die Parametriersoftware drivemaster2 wirkt sich nicht
auf die EtherCAT-Adressierung aus.
Anschlüsse/Statusanzeige des SD2
Die Anschlussbelegung der Ether-
CAT-Schnittstellen und die Bedeutung der
entsprechenden Status-LEDs sind in der
Hardwaredokumentation des jeweiligen
SD2-Antriebs beschrieben.
2.2 Prozessdatenbeschreibung (ESI-Dateien)
Die Prozessdaten des SD2-Antriebs sind in zwei ESI-Dateien (EtherCAT Sla-
ve Information) abgelegt. Dies sind XML-Dateien mit folgernder Bezeichnung:
SiebMeyer_Drives.xml und SiebMeyer_SD2.xml. Die Dateien stehen als ZIP-Archiv
zum Download auf der SIEB & MEYER-Website unter www.sieb-meyer.de zur Verfü-
gung.
Abhängig von der verwendeten Steuerung können diese Dateien direkt zur Konfigurati-
on der steuernden SPS verwendet werden.
6 Antriebssystem SD2 - EtherCAT-Anbindung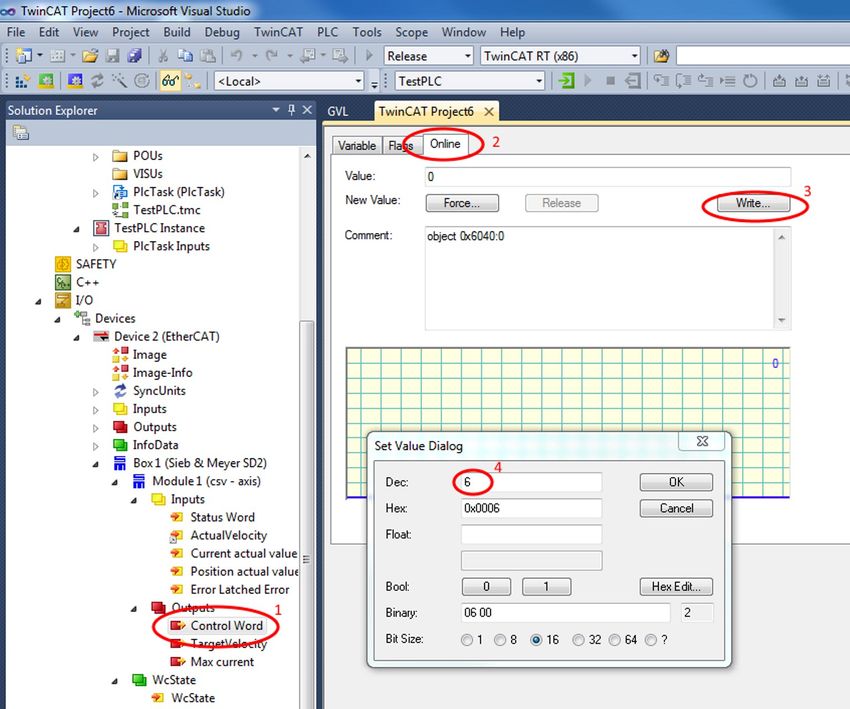
Zyklische Prozessdaten (PDO) – Betriebsarten
3 Zyklische Prozessdaten (PDO) –
Betriebsarten
Der Antrieb kann in den folgenden Betriebsarten (Modes of Operation) arbeiten:
▸ DC_MODES_OF_OPERATION_VEL
▸ DC_MODES_OF_OPERATION_HOMING
▸ DC_MODES_OF_OPERATION_CSP
▸ DC_MODES_OF_OPERATION_CSV
Objekt Objektnummer Sub Objektbeschreibung
Modes of Operation 0x6060 0 Siehe Seite 37
Modes of Operation Display 0x6061 0 Siehe Seite 38
Die Betriebsart kann mit dem Objekt 0x6060 vorgegeben werden. Mit dem Objekt
0x6061 kann ausgelesen werden, in welcher Betriebsart sich der Antrieb aktuell befin-
det. Bei einer Änderung der Betriebsart über das Objekt 0x6060, wird der neue Wert
erst für den Betrieb übernommen, wenn der Antrieb das nächste Mal vom Status „Reg-
ler Ein‟ in den Status „Betrieb freigegeben‟ wechselt.
Antriebssystem SD2 - EtherCAT-Anbindung 7
CSV-Mode
4 CSV-Mode
Im CSV-Mode (Cyclic Synchronous Velocity) arbeitet der Antrieb nach dem folgenden Schema.
Mode
Velocity
Synchronous
Cyclic
2:
Abb.
Abb. 2: Cyclic Synchronous Velocity Mode
4.1 Parametrierung
Bevor der SD2-Antrieb in einem EtherCAT-Netzwerk betrieben werden kann, muss er
mit Hilfe der Parametriersoftware drivemaster2 konfiguriert werden.
➮ Wählen Sie in der drivemaster2-Software unter „Parameter → Konfiguration → An-
triebssteuerung‟ die folgenden Einstellungen:
a. Wählen Sie die Betriebsart „Geschwindigkeitsmodus 1‟ aus.
Hinweis
Die Betriebsart „Geschwindigkeitsmodus 1‟ entspricht dem CSV-Mode im
EtherCAT.
b. Wählen Sie den Eintrag „EtherCAT‟ als Steuerkanal und als Sollwertkanal
aus.
➮ Laden Sie die Parameter über das Menü „Lader → Parameter in Antrieb schreiben‟
in den SD2-Antrieb. Für den Download kann eine serielle Verbindung (RS232) oder
eine USB-Verbindung mit dem PC verwendet werden.
8 Antriebssystem SD2 - EtherCAT-Anbindung
CSV-Mode
Hinweis
Fehlergefahr: Oftmals ist in der Parametrierung unter „Parameter → Digitalsignale
→ Digitale Eingänge‟ ein Eingang mit der Funktion „Regler Ein‟ belegt. Dies ist vor
allem der Fall, wenn der Parametersatz mit dem Assistenten erstellt wurde. Somit
kann der Antrieb nur verfahren werden, wenn 24 V an dem entsprechenden Ein-
gang angelegt sind.
4.2 Zyklische Prozessdaten (PDO)
Ist der Antrieb in der Betriebsart „Geschwindigkeitsmodus 1‟ konfiguriert, wird die fol-
gende Default-Konfiguration der Prozessdaten beim Antriebsstart geladen.
4.2.1 RxPDO 0 (Sollwerte)
Objekt Objektnummer Adresse Offset Größe Objektbeschreibung
[Byte] [Bit]
Control Word 0x6040 0 16 siehe Seite 35
Target Velocity 0x60FF 2 32 siehe Seite 46
Max Current 0x6073 6 16 siehe Seite 40
Der Master kann die Objektzuordnung des RxPDO 0 über das Objekt 0x1600 „CSV
RxPDO‟ auslesen und ändern.
4.2.2 TxPDO 0 (Istwerte)
Objekt Objektnummer Adresse Offset Größe Objektbeschreibung
[Byte] [Bit]
Status Word 0x6041 0 16 siehe Seite 35
Actual Velocity 0x606C 2 32 siehe Seite 39
Current Actual Value 0x6078 6 16 siehe Seite 40
Position Actual Value 0x6063 8 32 siehe Seite 39
Error Latched Error 0x2046 12 16 siehe Seite 34
Der Master kann die Objektzuordnung des TxPDO 0 über das Objekt 0x1A00 „CSV
TxPDO‟ auslesen und ändern.
Antriebssystem SD2 - EtherCAT-Anbindung 9
CSP-Mode
5 CSP-Mode
Im CSP-Mode (Cyclic Synchronous Position) arbeitet der Antrieb nach dem unten ab-
gebildete Schema. Der Master sendet zyklisch einen Positionssollwert an den Antrieb.
Der Antrieb behandelt die Lage-, Drehzahl- und Stromregelung.
Damit der Antrieb die Daten synchron verarbeiten kann, muss der Bus im DC-Mode
(Distributed Clocks) arbeiten. Der Antrieb synchronisiert sich mit dem Bus und berech-
net sich daraus die Interpolationszeit. Eine Parametrierung der Interpolationszeit ist
nicht nötig, der Antrieb kann sich auf folgende Zykluszeiten/Busfrequenzen synchroni-
sieren.
▸ 250 µs/4 kHz
▸ 500 µs/2 kHz
▸ 1 ms/1 kHz
▸ 2 ms/500 Hz
▸ 4 ms/250 Hz
▸ 8 ms/125 Hz.
Mode
Position
Synchronous
Cyclic
3:
Abb.
Abb. 3: Cyclic Synchronous Position Mode
5.1 Parametrierung
Bevor der SD2-Antrieb in einem EtherCAT-Netzwerk betrieben werden kann, muss er
mit Hilfe der Parametriersoftware drivemaster2 konfiguriert werden.
➮ Wählen Sie in der drivemaster2-Software unter „Parameter → Konfiguration → An-
triebssteuerung‟ die folgenden Einstellungen:
10 Antriebssystem SD2 - EtherCAT-AnbindungCSP-Mode
a. Wählen Sie die Betriebsart „Interpolierende Lageregelung‟ aus.
Hinweis
Die Betriebsart „Interpolierende Lageregelung‟ entspricht dem CSP-Mode im
EtherCAT.
b. Wählen Sie den Eintrag „EtherCAT‟ als Steuerkanal und als Sollwertkanal
aus.
➮ Laden Sie die Parameter über das Menü „Lader → Parameter in Antrieb schreiben‟
in den SD2-Antrieb. Für den Download kann eine serielle Verbindung (RS232) oder
eine USB-Verbindung mit dem PC verwendet werden.
Hinweis
Fehlergefahr: Oftmals ist in der Parametrierung unter „Parameter → Digitalsignale
→ Digitale Eingänge‟ ein Eingang mit der Funktion „Regler Ein‟ belegt. Dies ist vor
allem der Fall, wenn der Parametersatz mit dem Assistenten erstellt wurde. Somit
kann der Antrieb nur verfahren werden, wenn 24 V an dem entsprechenden Ein-
gang angelegt sind.
5.2 Zyklische Prozessdaten (PDO)
Ist der Antrieb in der Betriebsart „Interpolierende Lageregelung‟ konfiguriert, wird die fol-
gende Default-Konfiguration der Prozessdaten beim Antriebsstart geladen.
5.2.1 RxPDO 1 (Sollwerte)
Objekt Objektnummer Adresse Offset Größe Objektbeschreibung
[Byte] [Bit]
Control Word 0x6040 0 16 siehe Seite 35
Target Position 0x607A 2 32 siehe Seite 41
(1)
Velocity Offset 0x60B1 6 32 –
(1)
in Vorbereitung
Der Master kann die Objektzuordnung des RxPDO 1 über das Objekt 0x1601 „CSP
RxPDO‟ auslesen und ändern.
In der NC-Steuerung wird der Positionssollwert mit einem Sollwertgenerator erzeugt,
oftmals ist dann auch der dazugehörige Drehzahlsollwert bekannt. Die NC-Steuerung
kann diesen Drehzahlsollwert als „Velocity Offset‟ an den Antrieb übertragen, d. h. der
Antrieb braucht den Drehzahlsollwert nicht aus den Positionsstützstellen extrahieren,
sondern kann den hoch aufgelösten Drehzahlsollwert der NC-Steuerung verwenden.
Wenn die Drehzahlvorsteuerung nicht vom Master vorgegeben wird, muss im „Velocity
Offset‟ zwingend eine 0 übertragen werden oder das Objekt „Velocity Offset‟ muss aus
der PDO-Objektzuordnung gelöscht werden.
5.2.2 TxPDO 1 (Istwerte)
Objekt Objektnummer Adresse Offset Größe Objektbeschreibung
[Byte] [Bit]
Status Word 0x6041 0 16 siehe Seite 35
Position Actual Value 0x6064 2 32 siehe Seite 39
Antriebssystem SD2 - EtherCAT-Anbindung 11CSP-Mode
Objekt Objektnummer Adresse Offset Größe Objektbeschreibung
[Byte] [Bit]
Velocity Actual Value 0x606C 6 32 siehe Seite 39
Current Actual Value 0x6078 10 16 siehe Seite 40
Error Latched Error 0x2046 12 16 siehe Seite 34
Der Master kann die Objektzuordnung des TxPDO 1 über das Objekt 0x1A01 „CSP
TxPDO‟ auslesen und ändern.
12 Antriebssystem SD2 - EtherCAT-AnbindungHoming Mode
6 Homing Mode
Die folgende Abbildung zeigt die Struktur der Referenzfahrt. Eine Steuerung parame-
triert das Homing mit den Homing-Objekten, steuert den Homing-Prozess über das
„Control Word‟ und überwacht den Ablauf mit dem „Status Word‟.
Objekte
über
Homing-Parametrierung
4:
Abb.
Abb. 4: Homing-Parametrierung über Objekte
Parameterierung in drivemaster2
Alternativ kann die Homing-Funktion auch in der Software drivemaster2 parametriert
werden.
Voraussetzung
1. drivemaster2 -Version V1.20 Build 80 oder höher muss installiert sein.
2. Die Antriebssteuerung muss wie folgt parametriert sein: Betriebsart = Interpolie-
rende Lageregelung, Steuerkanal = EtherCAT.
(Wenn diese Parameter anders konfiguriert sind, werden die Homing-Parameter
nicht angezeigt.)
Antriebssystem SD2 - EtherCAT-Anbindung 13Homing Mode
drivemaster2
in
Homing-Parametrierung
5:
Abb.
Abb. 5: Homing-Parametrierung in drivemaster2
6.1 Homing-Methoden
Die folgenden Homing-Methoden sind implementiert.
6.1.1 Homing-Mode 1
1
Homing-Mode
6:
Abb.
Abb. 6: Homing-Mode 1
Der Motor startet in negativer Richtung bis die Achse den negativen Endschalter er-
reicht. Anschließend dreht der Motor in positiver Richtung, so dass die Achse den End-
schalter wieder verlässt. Der erste Nullimpuls nach Verlassen des Endschalters ist die
Home-Position.
14 Antriebssystem SD2 - EtherCAT-AnbindungHoming Mode
6.1.2 Homing-Mode 2
2
Homing-Mode
7:
Abb.
Abb. 7: Homing-Mode 2
Der Motor startet in positiver Richtung bis die Achse den positiven Endschalter erreicht.
Anschließend dreht der Motor in negativer Richtung, so dass die Achse den Endschal-
ter wieder verlässt. Der erste Nullimpuls nach Verlassen des Endschalters ist die Ho-
me-Position.
6.1.3 Homing-Mode 3
3
Homing-Mode
8:
Abb.
Abb. 8: Homing-Mode 3
Der Motor startet in positiver Richtung, wenn der Home-Kontakt nicht aktiv ist und in
negativer Richtung, wenn der Home-Kontakt aktiv ist. Wenn die Achse den Home-Kon-
takt auslöst, dreht der Motor in negative Richtung, so dass die Achse den Home-Kon-
takt wieder verlässt. Der erste Nullimpuls nach Verlassen des Home-Kontaktes ist die
Home-Position.
Antriebssystem SD2 - EtherCAT-Anbindung 15Homing Mode
6.1.4 Homing-Mode 4
4
Homing-Mode
9:
Abb.
Abb. 9: Homing-Mode 4
Der Motor startet in positiver Richtung, wenn der Home-Kontakt nicht aktiv ist und in
negativer Richtung, wenn der Home-Kontakt aktiv ist. Wenn die Achse den Home-Kon-
takt verlässt, dreht der Motor in positiver Richtung, so dass die Achse den Home-Kon-
takt wieder berührt. Der erste Nullimpuls nach Berühren des Home-Kontaktes ist die Ho-
me-Position.
6.1.5 Homing-Mode 5
5
Homing-Mode
10:
Abb.
Abb. 10: Homing-Mode 5
Der Motor startet in negativer Richtung, wenn der Home-Kontakt nicht aktiv ist und in
positiver Richtung, wenn der Home-Kontakt aktiv ist. Wenn die Achse den Home-Kon-
takt auslöst, dreht der Motor in positiver Richtung, so dass die Achse den Home-Kon-
takt wieder verlässt. Der erste Nullimpuls nach Verlassen des Home-Kontaktes ist die
Home-Position.
16 Antriebssystem SD2 - EtherCAT-AnbindungHoming Mode
6.1.6 Homing-Mode 6
6
Homing-Mode
11:
Abb.
Abb. 11: Homing-Mode 6
Der Motor startet in negativer Richtung, wenn der Home-Kontakt nicht aktiv ist und in
positiver Richtung, wenn der Home-Kontakt aktiv ist. Wenn die Achse den Home-Kon-
takt verlässt, dreht der Motor in negativer Richtung, so dass die Achse den Kontakt wie-
der berührt. Der erste Nullimpuls nach Berühren des Home-Kontaktes ist die Home-Po-
sition.
Antriebssystem SD2 - EtherCAT-Anbindung 17Homing Mode
6.1.7 Homing-Mode 10
10
Homing-Mode
12:
Abb.
Abb. 12: Homing-Mode 10
Der Motor startet immer in positiver Richtung und sucht den Home-Kontakt. Falls die
Achse den positiven Endschalter erreicht, wird die Drehrichtung umgekehrt. Nach Errei-
chen des Home-Kontaktes dreht der Motor in positiver Richtung, so dass die Achse den
Home-Kontakt wieder verlässt. Der erste Nullimpuls nach Verlassen des Home-Kontak-
tes ist die Home-Position.
18 Antriebssystem SD2 - EtherCAT-AnbindungHoming Mode
6.1.8 Homing-Mode 14
14
Homing-Mode
13:
Abb.
Abb. 13: Homing-Mode 14
Der Motor startet immer in negativer Richtung und sucht den Home-Kontakt. Falls die
Achse den negativen Endschalter erreicht, wird die Drehrichtung umgekehrt. Nach Er-
reichen des Home-Kontaktes dreht der Motor in negativer Richtung, so dass die Ach-
se den Home-Kontakt wieder verlässt. Der erste Nullimpuls nach Verlassen des Ho-
me-Kontaktes ist die Home-Position.
6.2 Steuer- und Status-Bits
6.2.1 Steuerwort (Control Word)
Bit Name Beschreibung
4 Homing operation start 0 = Homing nicht starten
1 = Homing starten
8 Halt 0 = Homing nicht abbrechen
1 = Homing abbrechen
Antriebssystem SD2 - EtherCAT-Anbindung 19Homing Mode
6.2.2 Statuswort (Status Word)
Bit Name Beschreibung
10 Target reached Homing-Prozess beendet
12 Homing attained Homing-Prozess gestartet
13 Homing error Homing-Fehler
Zustände der Homing-Funktion:
Bit 13 Bit 12 Bit 10 Beschreibung
0 0 0 Homing-Prozess wird ausgeführt
0 0 1 Homing-Prozess nicht eingeleitet
0 1 0 Home-Position gefunden / Homing-Prozess nicht beendet
0 1 1 Homing-Prozess erfolgreich beendet
1 X X Homing-Fehler
6.3 Homing-Funktion ausführen
Gehen Sie wie folgt vor, um die Homing-Funktion auszuführen:
➮ Setzen Sie das Bussystem in den Zustand „Operational‟.
➮ Setzen Sie den SD2-Antrieb in den Zustand „Einschaltbereit‟ oder „Eingeschaltet‟.
➮ Setzen Sie das Objekt Modes of Operation (0x6060) auf Homing (6).
➮ Parametrieren Sie die Homing-Funktion in der Software drivemaster2 oder setzen
Sie die gewünschten Homing-Einstellungen über die Objekte Homing Method, Ho-
ming Speed 1/2, Homing Acceleration und Homing Offset.
➮ Setzen Sie im Steuerwort Bit 4 auf den Wert 1 (Homing starten).
✔ Der Antrieb startet nun die Referenzfahrt.
Hinweis
Sie können eine laufende Referenzfahrt abbrechen, indem Sie Bit 8 im Steuerwort
setzen.
Vor dem erneuten Start einer Referenzfahrt müssen Sie Bit 4 im Steuerwort zurück-
setzen.
20 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
7 Objektverzeichnis
Im Folgenden ist eine Auswahl der zur Verfügung stehenden Objekte aufgelistet.
0x1000 – Device Type (Gerätetyp)
Index 0x1000
Name Device Type
Objektcode VAR
Datentyp Unsigned 32
Zugriff RO
PDO-Zuordnung –
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 0x00020192
Interne Objektnummer –
Dieses Objekt beschreibt die Art und die Funktion des EtherCAT-Geräts.
Bit-Nummer
31 … 24 23 … 16 15 … 0
Zusätzliche Informationen Geräteprofilnummer
Modus-Bits Typ
▸ Geräteprofilnummer: 402 (0x0192)
▸ Zusätzliche Informationen: 02 (Servo-Antrieb)
0x1001 – Error Register (Fehlerregister)
Index 0x1001
Name Error Register
Objektcode VAR
Datentyp Unsigned 8
Zugriff RO
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 255
Vorgabewert 0
Interne Objektnummer –
Das Fehlerregister entspricht dem CiA Draft Standard 301.
Bits des Objekts Error Register:
Bit Bedeutung
0 Allgemeiner Fehler
1 reserviert
2 reserviert
3 reserviert
4 Kommunikationsfehler
5 Antriebsprofil
6 0
Antriebssystem SD2 - EtherCAT-Anbindung 21Objektverzeichnis
Bit Bedeutung
7 SIEB & MEYER-Fehlermeldung
Allgemeiner Fehler
Das Bit wird bei jedem Antriebsfehler gesetzt.
Kommunikationsfehler
Eine Fehlermeldung nach dem Kommunikationsprofil in CiA-Standard DS301 ist aufge-
treten.
Antriebsprofil
Eine Fehlermeldung nach dem Antriebsprofil in CiA-Standard DS402 ist aufgetreten.
SIEB & MEYER-Fehlermeldung
Eine Fehlermeldung nach den SIEB & MEYER-Fehlernummern ist aufgetreten (siehe
Dokumentation „Antriebssystem SD2 – Gerätesteuerung‟, Abschnitt „Liste der Antriebs-
fehlermeldungen‟).
0x1008 – Device Name (Gerätename)
Index 0x1008
Name Device Name
Objektcode VAR
Datentyp Visible String [32]
Zugriff RO
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 32 Zeichen
Vorgabewert –
Interne Objektnummer 22
Der Gerätename wird aus der Parametrierung des Antriebs übernommen. Er kann in
der Software drivemaster2 vergeben werden.
Navigieren Sie dazu auf die Seite „Parameter → Konfiguration → Antrieb‟. Im Feld
„Identifikation‟ editieren Sie das Textfeld „Antriebsname‟. Es sind maximal 32 Zeichen
möglich:
0x1009 – Hardware Version
Index 0x1009
Name Hardware Version
Objektcode VAR
Datentyp Visible String [32]
Zugriff RO
22 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 32 Zeichen
Vorgabewert –
Interne Objektnummer 117
Der „Device Hardware Ident String‟ des Antriebs wird angezeigt.
0x100A – Software Version
Index 0x100A
Name Software Version
Objektcode VAR
Datentyp Visible String [32]
Zugriff RO
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 32 Zeichen
Vorgabewert –
Interne Objektnummer –
Die Softwareversion des EtherCAT-Kontrollers im SD2-Antrieb wird angezeigt.
0x1018 – Identity (Identität)
Index 0x1018
Name Identity
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 4
Vorgabewert 4
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1
Name Hersteller-ID
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 0x000005B0
Vorgabewert 0x000005B0
Interne Objektnummer –
Beschreibung Die Hersteller-ID gibt die ID der SIEB & MEYER AG (0x000005B0)
aus.
Subindex 2
Antriebssystem SD2 - EtherCAT-Anbindung 23Objektverzeichnis
Name Produktionscode
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert –
Interne Objektnummer –
Beschreibung Die folgenden Default-Werte für Produktionscodes sind für die
SIEB & MEYER-Geräte angelegt:
▸ SD2-Produktionscode: 0x00000000
▸ FC2-Produktionscode: 0x00219200
Subindex 3
Name Revisionsnummer
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert –
Interne Objektnummer –
Beschreibung Die EtherCAT-Revision wird ausgegeben.
Die Revisionsnummer ist ein 32-Bit-Wert, der sich in einen 16-Bit-Vor-
kommaanteil und einen 16-Bit-Nachkommaanteil gliedert. Der Wert
0x00010001 entspricht der Revision 1.001.
Subindex 4
Name Seriennummer
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert –
Interne Objektnummer –
Beschreibung Die Seriennummer des Antriebs wird ausgegeben.
Die Seriennummer ist eine 10-stellige Dezimalzahl im Wertebereich
von 1.000.000.000 bis 2.000.000.000.
0x10F1 – Error Settings (Fehlereinstellungen)
Index 0x10F1
Name Error Settings
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 2
24 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
Vorgabewert 2
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1
Name Local Error Reaction
Zugriff RW
PDO-Zuordnung möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 0 … (2 −1)
32
Vorgabewert 1
Interne Objektnummer –
Beschreibung Nicht verwendet
Subindex 2
Name Sync Error Counter Limit
Zugriff RW
PDO-Zuordnung möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 0 … (2 −1)
32
Vorgabewert 4
Interne Objektnummer –
Beschreibung Anzahl aufeinanderfolgender Synchronisationsfehler bis zur Fehler-
auslösung.
0x1600/0x1601 – RxPDO Mapping
Index 0x1600
0x1601
Name Receive PDO Mapping
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 1 ... 6
Vorgabewert siehe unten
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1–6
Name PDO Mapping
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 0 … (2 −1)
32
Antriebssystem SD2 - EtherCAT-Anbindung 25Objektverzeichnis
Vorgabewert siehe unten
Interne Objektnummer –
Beschreibung PDO-Mapping für das n-te Mapping-Objekt
Vorgabewerte der PDO-Mapping-Objekte
PDO PDO 0 (Objekt 0x1600) PDO 1 (Objekt 0x1601)
Name csv RxPDO csp RxPDO
Vorgabewert Subindex 0 3 2
Vorgabewert Subindex 1 0x60400010 0x60400010
Vorgabewert Subindex 2 0x60FF0020 0x607A0020
Vorgabewert Subindex 3 0x60730010 0
Vorgabewert Subindex 4 0 0
Vorgabewert Subindex 5 0 0
Vorgabewert Subindex 6 0 0
Aufbau der Mapping-Parameter-Einträge:
Bit 31 ... 16 Bit 15 ... 8 Bit 7 ... 0
Objektnummer (16 Bit) Subindex (8 Bit) Größe (8 Bit)
(1)
(1)
Bei Geräten der SD2-Serie sind nur 8-Bit-, 16-Bit- und 32-Bit-Objekte erlaubt. Daher muss hier immer
der Wert 0x08, 0x10 oder 0x20 eingetragen sein.
0x1A00/0x1A01 – TxPDO Mapping
Index 0x1A00
0x1A01
Name Transmit PDO Mapping
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 1 ... 6
Vorgabewert siehe unten
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1–6
Name PDO Mapping
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 0 … (2 −1)
32
Vorgabewert siehe unten
Interne Objektnummer –
Beschreibung PDO-Mapping für das n-te Mapping-Objekt
26 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
Vorgabewerte der PDO-Mapping-Objekte
PDO PDO 0 (Objekt 0x1A00) PDO 1 (Objekt 0x1A01)
Name csv TxPDO csp TxPDO
Vorgabewert Subindex 0 5 5
Vorgabewert Subindex 1 0x60410010 0x60410010
Vorgabewert Subindex 2 0x606C0020 0x60640020
Vorgabewert Subindex 3 0x60780010 0x606C0020
Vorgabewert Subindex 4 0x60630020 0x60780010
Vorgabewert Subindex 5 0x20460010 0x20460010
Vorgabewert Subindex 6 0 0
Aufbau der Mapping-Parameter-Einträge:
Bit 31 ... 16 Bit 15 ... 8 Bit 7 ... 0
Objektnummer (16 Bit) Subindex (8 Bit) Größe (8 Bit)
(1)
(1)
Bei Geräten der SD2-Serie sind nur 8-Bit-, 16-Bit- und 32-Bit-Objekte erlaubt. Daher muss hier immer
der Wert 0x08, 0x10 oder 0x20 eingetragen sein.
0x1C00 – Sync Manager Type
Index 0x1C00
Name Sync Manager Type
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 4
Vorgabewert 4
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1–4
Name PDO Mapping
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 1 ... 4
Vorgabewert siehe unten
Interne Objektnummer –
Beschreibung Art des Sync-Managers
Vorgabewerte der PDO-Mapping-Objekte
Objekt Sync Manager Type (Objekt 0x1C00)
Vorgabewert Subindex 0 4 Highest subindex supported (höchster unterstützter Su-
bindex)
Vorgabewert Subindex 1 1 Channel 1: Mailbox write (Kanal 1: Mailbox schreiben)
Antriebssystem SD2 - EtherCAT-Anbindung 27Objektverzeichnis
Objekt Sync Manager Type (Objekt 0x1C00)
Vorgabewert Subindex 2 2 Channel 2: Mailbox read (Kanal 2: Mailbox lesen)
Vorgabewert Subindex 3 3 Channel 3: Process data write (Kanal 3: Prozessdaten
schreiben)
Vorgabewert Subindex 4 4 Channel 4: Process Data read (Kanal 4: Prozessdaten le-
sen)
0x1C12 – RxPDO Assign (RxPDO-Zuordung)
Index 0x1C12
Name RxPDO Assign
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 1
Vorgabewert 1
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1
Name Subindex 001
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 0x1600 ... 0x1601
Vorgabewert 0x1600
Interne Objektnummer –
Beschreibung PDO-Mapping für das n-te Mapping-Objekt
Der SD2-Antrieb kann immer nur ein Receive-PDO zurzeit behandeln. Mit dem Objekt
0x1C12 kann zwischen den beiden vorkonfigurierten Receive-PDOs „csv RxPDO‟ und
„csp RxPDO‟ umgeschaltet werden.
0x1C13 – TxPDO Assign (TxPDO-Zuordung)
Index 0x1C12
Name TxPDO Assign
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 1
Vorgabewert 1
28 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1
Name Subindex 001
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 0x1A00 ... 0x1A01
Vorgabewert 0x1A00
Interne Objektnummer –
Beschreibung PDO-Mapping für das n-te Mapping-Objekt
Der SD2-Antrieb kann immer nur ein Transmit-PDO zurzeit behandeln. Mit dem Objekt
0x1C13 kann zwischen den beiden vorkonfigurierten Transmit-PDOs „csv TxPDO‟ und
„csp TxPDO‟ umgeschaltet werden.
0x1C32 – SM Output Parameter (SM-Ausgangsparameter)
Index 0x1C32
Name SM Output Parameter
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 32
Vorgabewert 32
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1
Name Synchronization Type
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 16
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Art der Synchronisierung:
▸ 0 = Free Run
▸ 1 = SM-Synchron
▸ 2 = DC-Sync0
▸ 3 = DC-Sync1
Subindex 2
Name Cycle Time
Zugriff RW
PDO-Zuordnung nicht möglich
Antriebssystem SD2 - EtherCAT-Anbindung 29Objektverzeichnis
Datentyp Unsigned 32
Einheit ns
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Zykluszeit in ns
Subindex 3
Name Shift Time
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung wird nicht unterstützt
Subindex 4
Name Synchronization Types Supported
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 16
0 … (2 −1)
Vorgabewert 0x401F
Interne Objektnummer –
Beschreibung Unterstützte Synchronisierungsbetriebsarten:
▸ Bit 0 = 1: Free Run wird unterstützt
▸ Bit 1 = 1: Synchron with SM 2 Event wird unterstützt
▸ Bit 2 = 1: DC-Sync0-Mode wird unterstützt
▸ Bit 3 = 1: DC-Sync1-Mode wird unterstützt
▸ Bit 14 = 1: dynamische Zeiten
Subindex 5
Name Minimum Cycle Time
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 62500
Interne Objektnummer –
Beschreibung minmale Zykluszeit
Subindex 6
Name Calc and Copy Time
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
30 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
Beschreibung Rechenzeitverzögerung
Subindex 8
Name Get Cycle Time
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 0…1
Vorgabewert 0
Interne Objektnummer –
Beschreibung Zykluszeit abrufen
▸ 0 = Messung der lokalen Zykluszeit wird gestoppt
▸ 1 = Messung der lokalen Zykluszeit wird gestartet
Subindex 9
Name Delay Time
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit ns
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Verzögerungszeit zwischen SYNC1-Event und Ausgabe der Ausgän-
ge (in ns, nur DC-Mode)
Subindex 10
Name Sync0 Cycle Time
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Zykluszeit des Sync0-Zyklusses
Subindex 11
Name Cycle Time too Small
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 16
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Zähler für Zykluszeit überschritten
Subindex 32
Name Sync Error
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Antriebssystem SD2 - EtherCAT-Anbindung 31Objektverzeichnis
Einheit –
Wertebereich 0…1
Vorgabewert 0
Interne Objektnummer –
Beschreibung Synchronisierungsfehler
0x1C33 – SM Input Parameter (SM-Eingangsparameter)
Index 0x1C33
Name SM Input Parameter
Objektcode REC
Datentyp siehe Subindex-Beschreibungen
Subindex 0
Name Subindex 0
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 32
Vorgabewert 32
Interne Objektnummer –
Beschreibung höchster unterstützter Subindex
Subindex 1
Name Synchronization Type
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 16
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Art der Synchronisierung:
▸ 0 = Free Run
▸ 1 = SM-Synchron
▸ 2 = DC-Sync0
▸ 3 = DC-Sync1
Subindex 2
Name Cycle Time
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit ns
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Zykluszeit in ns
Subindex 3
Name Shift Time
Zugriff RO
PDO-Zuordnung nicht möglich
32 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 12000
Interne Objektnummer –
Beschreibung minimale Zeit zwischen Sync0- und Syn1-Event
Subindex 4
Name Synchronization Types Supported
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 16
0 … (2 −1)
Vorgabewert 0x401F
Interne Objektnummer –
Beschreibung Unterstützte Synchronisierungsbetriebsarten:
▸ Bit 0 = 1: Free Run wird unterstützt
▸ Bit 1 = 1: Synchron with SM 2 Event wird unterstützt
▸ Bit 2 = 1: DC-Sync0-Mode wird unterstützt
▸ Bit 3 = 1: DC-Sync1-Mode wird unterstützt
▸ Bit 14 = 1: dynamische Zeiten
Subindex 5
Name Minimum Cycle Time
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 62500
Interne Objektnummer –
Beschreibung minmale Zykluszeit
Subindex 6
Name Calc and Copy Time
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Rechenzeitverzögerung
Subindex 8
Name Get Cycle Time
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 0…1
Vorgabewert 0
Interne Objektnummer –
Antriebssystem SD2 - EtherCAT-Anbindung 33Objektverzeichnis
Beschreibung Zykluszeit abrufen
▸ 0 = Messung der lokalen Zykluszeit wird gestoppt
▸ 1 = Messung der lokalen Zykluszeit wird gestartet
Subindex 9
Name Delay Time
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit ns
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Verzögerungszeit zwischen SYNC1-Event und Ausgabe der Ausgän-
ge (in ns, nur DC-Mode)
Subindex 10
Name Sync0 Cycle Time
Zugriff RW
PDO-Zuordnung nicht möglich
Datentyp Unsigned 32
Einheit –
Wertebereich 32
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Zykluszeit des Sync0-Zyklusses
Subindex 11
Name Cycle Time too Small
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 16
Einheit –
Wertebereich 16
0 … (2 −1)
Vorgabewert 0
Interne Objektnummer –
Beschreibung Zähler für Zykluszeit überschritten
Subindex 32
Name Sync Error
Zugriff RO
PDO-Zuordnung nicht möglich
Datentyp Unsigned 8
Einheit –
Wertebereich 0…1
Vorgabewert 0
Interne Objektnummer –
Beschreibung Synchronisierungsfehler
0x2046 – Error Latched Error (gespeicherte Fehlermeldung)
Index 0x2046
Name Error Latched Error
Objektcode VAR
34 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
Datentyp Unsigned 16
Zugriff RO
PDO-Zuordnung möglich
Einheit siehe Dokumentation „Antriebssystem SD2 – Gerätesteuerung‟
Wertebereich −32768 … 32767
Vorgabewert 0
Interne Objektnummer 70D
Das Objekt gibt den Fehler an, der zum Abschalten des Antriebs geführt hat. Eine aus-
führlichere Beschreibung ist in der Dokumentation „Antriebssystem SD2 – Gerätesteue-
rung‟ zu finden (siehe Abschnitt „DEV_CTRL_ERROR_CODE_LATCHED (Objekt 70D)‟
und „Liste der Antriebsfehlermeldungen‟).
Beispiel: Für den Fehler E11 „Kommunikation / Bussystemfehler‟ wird in das Objekt Er-
ror Latched Error der Wert 0x10B eingetragen.
0x603F – Error Code (Gespeicherte Fehlermeldung)
Index 0x603F
Name Error Code
Objektcode VAR
Datentyp Unsigned 16
Zugriff RO
PDO-Zuordnung möglich
Einheit –
Wertebereich 16
0 ... (2 −1)
Vorgabewert 0
Interne Objektnummer 70D
Eine Beschreibung der Fehlercodes ist im Dokument Antriebssystem SD2 – Geräte-
steuerung zu finden, Kapitel „Liste der Antriebsfehlermeldungen‟.
0x6040 – Control Word (Steuerwort)
Index 0x6040
Name Control Word
Objektcode VAR
Datentyp Unsigned 16
Zugriff RW
PDO-Zuordnung möglich
Einheit Bits codiert nach DS402-Standard
Wertebereich 0 … 65535
Vorgabewert 0
Interne Objektnummer 68D
Das Steuerwort ist in der Dokumentation „Antriebssystem SD2 – Gerätesteuerung‟ be-
schrieben (siehe Abschnitt „Aufbau des Steuerwortes (Objekt 68D)‟.
0x6041 – Status Word (Statuswort)
Index 0x6041
Name Status Word
Antriebssystem SD2 - EtherCAT-Anbindung 35Objektverzeichnis
Objektcode VAR
Datentyp Unsigned 16
Zugriff RW
PDO-Zuordnung möglich
Einheit Bits codiert nach DS402-Standard
Wertebereich 0 … 65535
Vorgabewert 0
Interne Objektnummer 67D
Das Statuswort ist in der Dokumentation „Antriebssystem SD2 – Gerätesteuerung‟ be-
schrieben (siehe Abschnitt „Aufbau des Statuswortes (Objekt 67D)‟.
0x605A – Quick Stop Option Code (Schnellhaltreaktion)
Index 0x605A
Name Quick Stop Option Code
Objektcode VAR
Datentyp Integer 16
Zugriff RW
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 65535
Vorgabewert 0
Interne Objektnummer 74D
Über dieses Objekt kann die Reaktion auf den Gerätesteuerbefehl „Schnellhalt‟ para-
metriert werden.
Dieses Objekt wird intern über das Objekt DEV_CTRL_QUICKSTOP_OPTIONCODE
(Objekt 74D) abgebildet.
Datenbeschreibung:
Wert Schnellhaltreaktion
−3 Moment halten
−2 Moment herunterrampen
0 Leistungsteil sofort ausschalten
1 Mit Bremsrampe herunterrampen
2 Mit Schnellhaltrampe herunterrampen
3 An der Stromgrenze herunterrampen
4 An der Spannungsgrenze herunterrampen
5 Mit Bremsrampe herunterrampen und im Zustand „Schnellhalt‟ verweilen (der Befehl
„Spannung sperren‟ muss gegeben werden)
6 Mit Schnellhaltrampe herunterrampen und im Zustand „Schnellhalt‟ verweilen (der
Befehl „Spannung sperren‟ muss gegeben werden)
7 An der Stromgrenze herunterrampen und im Zustand „Schnellhalt‟ verweilen (der
Befehl „Spannung sperren‟ muss gegeben werden)
8 An der Spannungsgrenze herunterrampen und im Zustand „Schnellhalt‟ verweilen
(der Befehl „Spannung sperren‟ muss gegeben werden)
Weitere Informationen sind in der Dokumentation „Antriebssystem SD2 – Gerätesteue-
rung‟ im Abschnitt „Schnellhalt‟ zu finden.
36 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
0x605B – Shutdown Option Code (Abschaltreaktion)
Index 0x605B
Name Shutdown Option Code
Objektcode VAR
Datentyp Integer 16
Zugriff RW
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 65535
Vorgabewert 0
Interne Objektnummer 73D
Über dieses Objekt kann die Reaktion auf den Gerätesteuerbefehl „Shutdown‟ (Ab-
schalten) parametriert werden.
Dieses Objekt wird intern über das Objekt DEV_CTRL_SHUTDOWN_OPTIONCODE
(Objekt 73D) abgebildet.
Datenbeschreibung:
Wert Abschaltreaktion
−1 Reserviert (Kurzschießen der Motorphasen)
0 Leistungsteil sofort ausschalten
1 Mit Bremsrampe herunterrampen
0x605C – Disable Operation Option Code (Reaktion auf Betrieb sperren)
Index 0x605C
Name Disable Operation Option Code
Objektcode VAR
Datentyp Integer 16
Zugriff RW
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 65535
Vorgabewert 0
Interne Objektnummer 75D
Über dieses Objekt kann die Reaktion auf den Gerätesteuerbefehl „Disable Operation‟
(Betrieb sperren) parametriert werden.
Dieses Objekt wird intern über das Objekt
DEV_CTRL_DISABLE_OPERATION_OPTIONCODE (Objekt 75D) abgebildet.
Datenbeschreibung:
Wert Reaktion auf Betrieb sperren
0 Leistungsteil sofort ausschalten
1 Mit Bremsrampe herunterrampen
0x6060 – Modes of Operation (Betriebsarten)
Index 0x6060
Antriebssystem SD2 - EtherCAT-Anbindung 37Objektverzeichnis
Name Modes of Operation
Objektcode VAR
Datentyp Integer 8
Zugriff RW
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 255
Vorgabewert 0
Interne Objektnummer 76D
Über dieses Objekt wird die Betriebsart eingestellt, in der der Antrieb im Gerätezustand
„Betrieb freigegeben‟ arbeiten soll. Die Initialisierung des Parameters erfolgt über die
Software drivemaster2. Weitere Informationen sind in der Dokumentation „Antriebssys-
tem SD2 – Gerätesteuerung‟ im Abschnitt „Objekte für die Betriebsartenauswahl‟ zu fin-
den.
Dieses Objekt wird intern über das Objekt DEV_CTRL_MODES_OF_OPERATION
(Objekt 76D) abgebildet.
Datenbeschreibung:
Wert Betriebsart
0 Reserviert
1 PP Profile Position Mode (Positioniermodus) – wird zurzeit nicht unterstützt
2 VL Velocity Mode (Geschwindigkeitsmodus 1)
3 PV Profile Velocity Mode – in Vorbereitung
4 PT Torque Profile Mode (Strom-/ Drehmomentregelung) – wird zurzeit nicht unter-
stützt
5 Reserviert
6 HM Homing Mode
7 Reserviert
8 CSP Cyclic Synchronous Positioning Mode
9 CSV Cyclic Synchronous Velocity Mode
0x6061 – Modes of Operation Display (Betriebsart auslesen)
Index 0x6061
Name Modes of Operation Display
Objektcode VAR
Datentyp Integer 8
Zugriff RO
PDO-Zuordnung –
Einheit –
Wertebereich 0 … 255
Vorgabewert 0
Interne Objektnummer 77D
Über dieses Objekt kann im Gerätezustand „Betrieb freigegeben‟ die momentane Be-
triebsart des Antriebs ausgelesen werden.
Dieses Objekt wird intern über das Objekt
DEV_CTRL_MODES_OF_OPERATION_DISPLAY (Objekt 77D) abgebildet.
38 Antriebssystem SD2 - EtherCAT-AnbindungObjektverzeichnis
Datenbeschreibung: Siehe Objekt „0x6060 – Modes of Operation (Betriebsarten)“, Sei-
te 37
0x6063 – Position Actual Value Inc (Lageistwert)
Index 0x6063
Name Position Actual Value Inc
Objektcode VAR
Datentyp Integer 32
Zugriff RW
PDO-Zuordnung möglich
Einheit Abhängig von der Auflösung des Motormesssystems
Wertebereich 31 31
(−2 ) … (2 −1)
Vorgabewert 0
Interne Objektnummer 143D
Der Lageistwert wird in inc angegeben. Die Skalierung ist abhängig vom verwendeten
Motormesssystem und der Parametrierung des Antriebs. Für ein Resolvermesssystem
gilt z. B. 4096 inc = 1 Motorumdrehung.
Dieses Objekt wird intern über das Objekt PCTRL_POSITION_ACTUAL_VALUE
(Objekt 143D) abgebildet.
0x6064 – Position Actual Value (Lageistwert)
Index 0x6064
Name Position Actual Value
Objektcode VAR
Datentyp Integer 32
Zugriff RW
PDO-Zuordnung möglich
Einheit Abhängig von der Auflösung des Motormesssystems
Wertebereich 31 31
(−2 ) … (2 −1)
Vorgabewert 0
Interne Objektnummer 143D
Der Lageistwert wird in inc angegeben. Die Skalierung ist abhängig vom verwendeten
Motormesssystem und der Parametrierung des Antriebs. Der Wert wird als 24-Bit-Wert
übergeben und setzt sich wie im Objekt „Target Position‟ zusammen. Die unteren 8 Bit
ergeben einen Nachkommaanteil, der beim Objekt „Target Position‟ zur Erhöhung der
Auflösung genutzt wird. Beim Objekt „Position Actual Value‟ ist dieser 0, da die Position
nicht in dieser Präzision gemessen werden kann. Für ein Resolvermesssystem gilt z. B.
4096 × 256 = 1048576 inc = 1 Motorumdrehung.
Dieses Objekt wird intern über das Objekt PCTRL_POSITION_ACTUAL_VALUE
(Objekt 143D) abgebildet.
0x606C – Velocity Actual Value (Drehzahlistwert)
Index 0x606C
Name Velocity Actual Value
Objektcode VAR
Datentyp Integer 32
Antriebssystem SD2 - EtherCAT-Anbindung 39Sie können auch lesen