Highlights . durchgängiges Safety-System . kompakte Safety-PLC . zertifiziert bis IEC 61508 SIL 3 und . in TwinCAT 3 integriertes Safety - von ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

TwinSAFE
530
..
Highlights
durchgängiges Safety-System
..von I/Os bis Drives
..kompakte Safety-PLC
zertifiziert bis IEC 61508 SIL 3 und
..EN ISO 13849-1:2015 PL e
in TwinCAT 3 integriertes Safety
Engineering
TwinSAFE
Offene und skalierbare Sicherheitstechnologie
u www.beckhoff.de/TwinSAFE
532 Offene und skalierbare 538 Controller, Koppler 544 Sichere Ausgänge
Safety-Lösung
533 Safety-over-EtherCAT (FSoE) 538 Compact-Controller EK1960 544 EtherCAT-Klemmen EL290x
534 Modulare und flexible 540 EtherCAT-Koppler EK1914 545 EtherCAT-Steckmodule EJ29xx
Sicherheitstechnik 547 Busklemme KL2904
536 TwinCAT 3 und Safety
548 Sichere Antriebstechnik
2 84 EtherCAT-Klemmen mit 541 Logic
TwinSAFE-SC-Technologie 548 Sichere Antriebe
541 EtherCAT-Klemmen EL69xx
541 EtherCAT-Steckmodul EJ6910 338 Servoverstärker AX5000
546 Busklemme KL6904 330 Servoverstärker AX8000
550 Servomotorklemme mit STO
EL72xx-9014
551 Servomotormodul mit STO
542 Sichere Eingänge EP7211-9034
551 Realisierung STO/SS1
542 EtherCAT-Klemme EL1904 552 Realisierung Safe Motion
542 EtherCAT Box EP1908
543 EtherCAT-Steckmodule EJ19xx
547 Busklemme KL1904
TwinSAFE
531
TwinSAFE | Offene und skalierbare Safety-Lösung
Die integrierte Sicherheitslösung TwinSAFE Kommunikation über unabhängige Zertifizierte Sicherheitsfunktions-
ist die konsequente Fortführung der offenen, Sicherheitskreise bausteine und Customizing erleichtern
PC-basierten Beckhoff-Steuerungsphilosophie. Eine Kommunikation zwischen verteilten die Konfiguration
Aufgrund der Modularität und Vielseitigkeit TwinSAFE-Logic-Komponenten ist sehr einfach Die zertifizierten Sicherheitsfunktionsbau-
fügen sich die TwinSAFE-Komponenten naht- mit der TwinCAT-Software zu realisieren. Dies steine der TwinSAFE-Logic-Komponenten
los in das Beckhoff-Steuerungssystem ein. gilt nicht nur für Klemmen, die sich in einem erlauben eine einfache, fehlerfreie und
Die I/O-Komponenten sind in den Formaten Netzwerk befinden, sondern auch für Geräte kostengünstige Realisierung aller Sicherheits-
Busklemme, EtherCAT-Klemme, EtherCAT- an verschiedenen Steuerungen. Sobald die aufgaben: von der einfachen Schutztür-Über-
Steckmodul und EtherCAT-Box verfügbar. Steuerungen über eine Kommunikationsver- wachung über komplexe Muting-Funktionen
Dank des feldbusneutralen Safety-Proto- bindung mithilfe eines Feldbusses oder über auf Basis von digitalen Signalen bis hin zur
kolls (TwinSAFE/Safety-over-EtherCAT) können Netzwerkvariablen verfügen, können auch sicheren Steuerung hochkomplexer Abläufe
TwinSAFE-Geräte in beliebige Feldbussysteme sicherheitsrelevante Daten und Signale aus- auf Basis von analogen Signalen. Dabei kön-
integriert werden. Dazu werden sie in beste- getauscht werden. Die Reaktionszeiten und nen auch vernetzte und verkettete Anlagen
hende Netzwerke mit K-Bus oder EtherCAT Fähigkeiten der benutzten Systeme müssen sicherheitstechnisch realisiert werden. Hier
integriert und können als IP-67-Modul dabei natürlich berücksichtigt werden. kann vor allem das sogenannte „Customi-
direkt in der Maschine eingesetzt werden. Die TwinCAT-Software übernimmt dabei zing“ genutzt werden: Innerhalb einer Sicher-
Die Safety-I/Os bilden dabei die Schnittstelle die Aufgabe der Datenverteilung. Diese zen- heitsapplikation können sicherheitstechnische
zur sicherheitsrelevanten Sensorik und Aktorik. trale Datenverteilung hat zwei wesentliche Teilgruppen gebildet werden, die anschlie-
Durch die Möglichkeit, die sicherheitsrele- Vorteile: ßend während des laufenden Betriebs perma-
vanten Signale mit einem Standard-Bussystem – Alle sicherheitsrelevanten Daten werden nent oder temporär deaktiviert oder passiviert
zu übertragen, ergeben sich erhebliche Vor- über die funktionale Steuerung geführt werden können. Ohne diese Betriebsmodi
teile im Bereich Planung, Installation, Betrieb, und stehen dieser zu Diagnosezwecken sind Inbetriebnahme, Wartung und Teilbetrieb
Wartung, Diagnose und bei den Kosten. zur Verfügung. Das Erzeugen von Dia- von verketteten Maschinen nicht möglich bzw.
TwinSAFE
Die sicherheitstechnische Applikation gnosedaten auf der Sicherheitsteuerung sehr komplex.
wird in der TwinCAT-Software konfiguriert entfällt. Programmieraufwand, Rechen- Bei den TwinSAFE-Logic-Komponenten
532 bzw. programmiert. Diese Applikation wird leistung und Kosten werden eingespart. können zum einen alle Diagnosedaten und
dann über den Bus auf eine TwinSAFE-Logic- – Alle von der TwinCAT-Software bedien- Zustände der Funktionsbausteine in das
Komponente übertragen. Diese bilden das baren Feldbussysteme sind auch für zyklische EtherCAT-Telegramm eingeblendet
Herzstück des TwinSAFE-Systems. Alle in der die Sicherheitstechnik zugänglich. werden. Zum anderen werden die Diagnose-
Anlage befindlichen Sicherheitsgeräte kom- Das TwinSAFE/Safety-over-EtherCAT- daten direkt in der Logic-Komponente für
munizieren mit dieser Logic-Komponente. Protokoll ist so sicher, dass auch ein einen asynchronen Zugriff abgelegt. Dadurch
Aufgrund der enormen Flexibilität des Sys- Mischen von Feldbussystemen sowie ist eine umfassende Diagnose ohne zusätz-
tems können auch mehrere TwinSAFE-Logic- der sicherheitsrelevante Datenaustausch lichen Applikationsaufwand leicht zu reali-
Komponenten gleichzeitig in einem Netzwerk zwischen Modulen an verschiedenen sieren.
betrieben werden. Feldbussystemen unproblematisch ist.
Technische Änderungen vorbehalten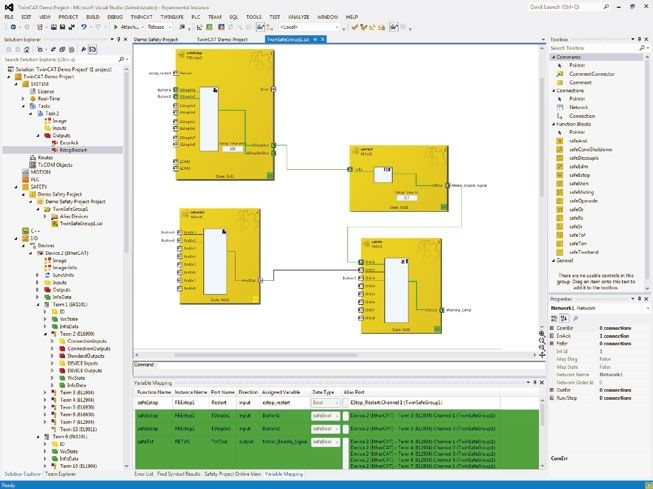
Safety-Input Safety-Inputs Safety-Inputs Safety-Inputs
Ethe
erCAT
EtherCAT
EtherCAT-Kemmen
EtherCAT-
EtherCAT Box
Steckmodul Safety-Inputs
Panel-PC mit Tastererweiterung
TwinSAFE-Logic Safety-Outputs Safety-Inputs/Outputs
Safety-Drives
Safety
y Drive mit TwinSAFE-Optionskarte
Lichtgitter
EtherCAT-Servoverstärker
EtherCAT-Ser
EtherCAT-S Safety-Drives mit Safe Motion
und integrierter TwinSAFE-Logic
Backup-and-Restore-Mechanismus Mechanismus. Daher wird kein zusätzliches nische Überprüfung erfolgt vollständig auto-
erleichtert Austausch im Fehlerfall Speicherwechselmedium wie bei anderen matisch und bedarf keines Eingriffs durch
Da alle Parameter und Einstellungen sowie Systemen benötigt. Der Anwender kann diese den Anwender. Die Instandhaltung muss
die Applikationssoftware auf den TwinSAFE- Funktion in der TwinCAT-Software aktivieren lediglich die Komponente austauschen, alles
Logic-Komponenten gespeichert werden, kann bzw. per Applikation anstoßen. Weitere wird zuverlässig und sicher durch das
die Safety-Steuerung entweder in der Anlage Wurde die ursprüngliche Komponente, TwinSAFE-System erledigt.
über den Bus oder aber am Arbeitsplatz pro- z. B. aufgrund eines Defektes ausgetauscht,
grammiert und einfach in das System gesteckt erkennt das System automatisch eine neue
werden. TwinSAFE-Logic-Komponente und die gültige
Die Logic-Komponenten verfügen über Applikation wird automatisch auf die neue
einen speziellen Backup-and-Restore- Komponente geladen. Die sicherheitstech-
Safety-over-EtherCAT – Offenes Safety-Protokoll nach IEC 61784-3
Das offene Protokoll Safety-over-EtherCAT Prinzip. So kann Safety-over-EtherCAT Connections zu verschiedenen Slaves
(abgekürzt mit FSoE „Failsafe over auch über andere Feldbusse und Protokolle aufbauen und überwachen.
EtherCAT“) definiert eine sicherheits- wie PROFIBUS, CANopen oder Ethernet
gerichtete Kommunikationsschicht für erfolgen. Als Übertragungsstrecke können Weitere Informationen siehe Seite 2 65
EtherCAT. Es erfüllt die Anforderungen auch Kupfer- oder Lichtwellenleiter, Funk-
der IEC 61508 SIL 3 und ermöglicht die strecken oder Übertragungskonzepte wie
Übertragung von sicheren und Standard- Datenlichtschranken genutzt werden.
TwinSAFE
Informationen auf dem gleichen Kommu- Das Telegramm ist so gestaltet, dass
nikationssystem ohne Einschränkungen bereits mit einer minimalen Container-
im Zusammenhang mit Übertragungs- länge von 6 Byte alle Sicherungsinforma- 533
geschwindigkeit und Zykluszeit. tionen inklusive einem Byte sicherer Pro-
Durch diese Offenheit sind Übertra- zessdaten übertragen werden können.
gungsmedium und Übertragungsstrecke Die sicheren Daten werden zwischen
bei Safety-over-EtherCAT beliebig. FSoE einem Safety-over-EtherCAT-Master und
ist fokussiert auf den leistungsstarken einem Safety-over-EtherCAT-Slave zyklisch
Ethernet-Feldbus EtherCAT, die Übertra- ausgetauscht. Dieser Mechanismus wird
gung der sicherheitsgerichteten Prozess- als Verbindung (TwinSAFE Connection)
daten erfolgt nach dem Black-Channel- bezeichnet. Ein Master kann mehrere
Technische Änderungen vorbehalten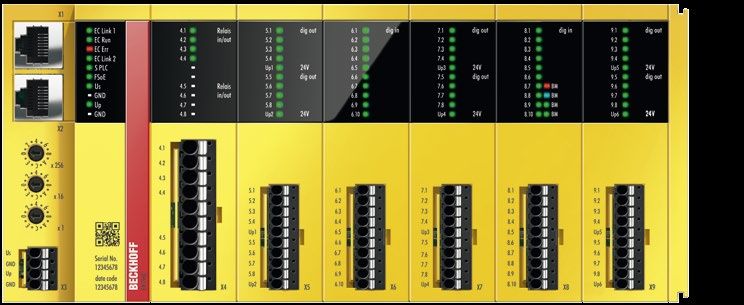
Ethernet
LWL
Embedded-PC EtherCAT-Slave: EtherCAT- TwinSAFE- Embedded-PC CX50xx-B110,
CX50xx-B110, Koppler EK1100, Medienkonverter EtherCAT-Box EtherCAT-Klemmen,
EtherCAT-Klemmen, EtherCAT-Klemmen, EP9521 EP1908 TwinSAFE-Klemmen EL1904, EL2901
TwinSAFE-Klemmen TwinSAFE-Logic-Klemme
EL1904, EL2901 EL6910
PROFIBUS
EtherCAT CANopen EtherCAT
CANopen-Slave: PROFIBUS-Slave: EtherCAT-Slave:
Embedded-PC CX8051, Busklemmen, „Compact“-Buskoppler BK3150, Busklemmen, Koppler EK1100, EtherCAT-Klemmen,
TwinSAFE-Klemmen KL1904, KL2904 TwinSAFE-Klemmen KL1904, KL2904 TwinSAFE-Logic-Klemme EL6910
EtherCAT Servoverstärker Synchron EtherCAT-Steckmodule TwinSAFE-
AX5000 mit TwinSAFE-Drive- Servomotoren EJxxxx EtherCAT-Box
Optionskarte AX5805 AM8000 EP1908
TwinSAFE | Modulare und flexible Sicherheitstechnik
TwinSAFE stellt die konsequente Fortfüh- wie für die dezentrale Vernetzung von klemmenstrang können an beliebiger Stelle
rung der offenen, PC-basierten Beckhoff- sicherheitsgerichteten Signalen über die sichere Logik KL6904 und Kombinatio-
Steuerungsphilosophie dar. Dank des feld- Bereiche, Anlagenteile und Module hinweg. nen aus sicheren Eingängen KL1904 sowie
busneutralen Safety-Protokolls können die Mit TwinSAFE sind alle Safety-Funktionen sicheren Ausgängen KL2904 platziert werden.
TwinSAFE-Geräte in beliebige Feldbussysteme auf der einheitlichen Engineering-Plattform Im EtherCAT-Klemmensystem steht nach dem
integriert werden. Mit den TwinSAFE-I/O- TwinCAT programmier- und konfigurierbar. gleichen Prinzip eine größere Auswahl an
Modulen wird die Sicherheitstechnik nahtlos Von der SPS über die I/Os bis zur Komponenten zur Verfügung.
in den Klemmenstrang integriert, wobei sich Antriebstechnik integriert TwinSAFE naht-
die sicheren Signale beliebig mit den Stan- los sichere Funktionalität in die Standard- Dezentral | Safety über EtherCAT
dardsignalen mischen lassen. Die Kapselung Steuerungsplattform. TwinSAFE ist sowohl hinaus
und Entkopplung einzelner Produktions- oder als Stand-Alone-System als auch als dezen- Für komplexere Topologien in dezentra-
Fertigungszellen wird durch das TwinSAFE- trale Steuerung einsetzbar: ler Anordnung eignen sich die sicheren
System wesentlich erleichtert, indem Safety- EtherCAT-Klemmen, da TwinSAFE die Leis-
Komponenten genau an den Stellen platziert Lokal | Der TwinSAFE-Compact- tungsfähigkeit von EtherCAT voll ausschöp-
werden können, an denen Sicherheitsfunk- Controller fen kann. Die sichere Logik wird über die
tionen erforderlich sind. Damit reduziert sich Die All-in-One-Lösung für lokale Safety- TwinSAFE-Logic EL6910 abgebildet, die die
der Aufwand für Projektierung, Montage und Applikationen ist der TwinSAFE-Compact- digitalen Eingänge EL190x und die digitalen
Material, und auch die Wartung wird durch Controller EK1960. Er integriert eine Ausgänge EL290x verknüpft. In einer dezen-
schnellere Diagnose und Austausch nur weni- vollständige Safety-Steuerung inklusive tralen Safety-Lösung können die Klemmen
ger Komponenten vereinfacht. Erweiterungen I/O-Ebene mit 20 sicheren Digital-Eingän- über das gesamte Netzwerk verteilt werden,
oder Umstellungen der Anlage lassen sich gen und 24 sicheren Digital-Ausgängen. durch die EtherCAT-Box EP1908-0002 sogar
ohne Verdrahtungsaufwand schnell umsetzen. Der EK1960 kann bis zu 128 TwinSAFE- bis in IP-67-Bereiche hinein.
Durch Offenheit und Feldbusunabhängigkeit Connections verwalten. Zur flexiblen
TwinSAFE
sind Übertragungsmedium und -strecke Anpassung an unterschiedliche Sicherheits- Motion Control | EtherCAT-Antriebe
bei Safety-over-EtherCAT beliebig: Neben aufgaben ist der EK1960 mit weiteren mit integrierter Safety
534 unterschiedlichen Feldbussen können auch TwinSAFE-I/O- und Drives-Komponenten Die einfache Realisierung sicherer Antriebs-
Medienkonverter zwischen Kupfer- und Licht- über das TwinSAFE-Protokoll erweiterbar. funktionen erfolgt mit TwinSAFE über die
wellenleiter-Physik sowie zwischen Kupfer TwinSAFE-Drive-Optionskarten AX58xx für
und Funk, und auch Übertragungskonzepte Lokal | Synthese aus sicheren den EtherCAT-Servoverstärker AX5000 oder
wie Datenlichtschranken genutzt werden. und Standard-I/Os die Bestelloptionen -0100 bzw. -0200 für das
Mit den Embedded-PCs CX8000, CX5000 Multiachs-Servosystem AX8000. Die Options-
Skalierbare Sicherheitstechnik und CX9000 sowie den Kleinsteuerungen karte AX5801 und die Bestelloption -0100
Unabhängig von der Komplexität der Safety- der Serie BX lassen sich sichere Signale und beinhalten die Funktionen STO und SS1.
Applikation eignet sich TwinSAFE für kleine, Standard-Signale der Automatisierungstech- Die Funktion wird über einen sicheren Aus-
lokale oder zentrale Projekte genauso gut, nik in einem System vermischen. Im Bus- gang angesteuert und ist separat verdrahtet.
Technische Änderungen vorbehalten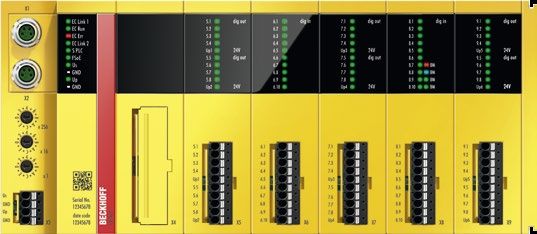
Ethernet
EtherCAT
EtherCAT
PROFIBUS
CANopen EtherCAT
Local stand-alone Safety Local integrated Safety Decentral Safety Safety Motion Control PC-based Safety
Im Fall der -0100 sind STO und SS1 auch feriert die Sicherheitsapplikation in einen
über FSoE aktivierbar. Standard-Industrie-PC. Innerhalb der
Die Optionskarte AX5805/AX5806 und Standard TwinCAT 3 Laufzeitumgebung
die Bestelloption -0200 sind in der Lage, kann so eine Sicherheitsapplikation mit
den Motor momentenfrei zu schalten oder SIL 3 gemäß IEC 61508 (ed. 2) bzw. Kate-
Geschwindigkeit, Position und Drehrichtung gorie 4, PL e gemäß EN ISO 13849-1:2015
zu überwachen (gemäß EN ISO 13849-1:2015 realisiert werden. Im Gegensatz zu den
bis PL e). Dazu sind keine weiteren Beschal- Hardware-TwinSAFE-Logic-Komponenten
tungen wie Schütze bzw. Schützkontakte in wird die TwinCAT Safety PLC nicht mit vor-
den Versorgungsleitungen nötig. Die sichere zertifizierten Funktionsbausteinen konfigu-
Antriebstechnik kommuniziert durch den riert. Die Sicherheitsapplikation kann hier
Servoverstärker direkt mit den im Netzwerk in der sicherheitsgerichteten Hochsprache
vorhandenen TwinSAFE-Komponenten. Safety C implementiert werden, was eine
Des Weiteren umfasst der Multiachs- höhere Komplexität der Sicherheitsapplika-
Servoverstärker AX8000 neue Funktionen tion erlaubt.
der sicheren Antriebstechnik mit TwinSAFE:
Mit der Bestelloption -0100 und -0200
enthalten die Achsmodule AX8108,
AX8118 und AX8206 eine programmier-
bare TwinSAFE-Logic entsprechend einer
EL6910 und ermöglichen die direkte Imple-
mentierung der Sicherheitsapplikation im
Servoverstärker. Abhängig vom Anwen-
TwinSAFE
dungsfall kann eine Vorverarbeitung der
sicherheitsgerichteten Informationen direkt
im Antrieb erfolgen, sodass die zentrale 535
TwinSAFE-Logic nur noch die dort aggregier-
ten Informationen verarbeiten muss.
PC-based Safety | Sicherheitstechnik
auf Standard-Industrie-PC
Die bisher hier vorgestellten Topologien
nutzen eine Hardware-TwinSAFE-Logic-
Komponente als Herzstück der Sicherheits-
applikation. Die TwinCAT Safety PLC trans-
Technische Änderungen vorbehalten
Safety Engineering
FBD
Safety C
TwinCAT Safety PLC Mit TwinCAT 3 wird mit einer Safety-Entwick-
lungsumgebung und einer Safety-Runtime
der nächste Schritt im Bereich Sicherheits-
lösungen vollzogen.
TwinCAT 3 und Safety | Vereinfachtes Engineering
Mit TwinCAT 3 als durchgängiges Entwick- Projekt auf die ausführende Hardware über- ob die erstellte Anwendung einer erneuten
lungswerkzeug werden weitere Möglich- tragen wird, müssen diese Alias-Geräte den Prüfung bedarf.
keiten für sicherheitsrelevante Anwendungs- verbauten physikalischen Geräten zugeordnet Neben der Programmierung selbst wer-
gebiete geschaffen. Zum einen bietet werden. den auch die Debug- und Testphase durch
TwinCAT 3 mit dem Safety-Editor zusätz- Neben der Verwendung vorgegebener verbesserte Tools optimal unterstützt. Pro-
liche Funktionalität zur Erstellung und Funktionsbausteine besteht zukünftig die gramme lassen sich, wie in Visual Studio®
Verwaltung sicherheitsrelevanter Anwen- Möglichkeit der Erstellung eigener Funk- gewohnt, debuggen: Die Online-Variablen-
dungen. Zum anderen kann durch die Safety- tionsbausteine. Diese können zum einen werte und Zustände der Funktionsblöcke
Runtime erstmals ein Standard-Industrie-PC aus bereits vorzertifizierten Bausteinen werden direkt in der grafischen Umgebung
als Sicherheitssteuerung genutzt werden. erzeugt werden. Zum anderen können neue angezeigt und ermöglichen so ein schnelles
Funktionsbausteine durch die Verwendung und einfaches Debuggen der Applikation.
Safety-Editor von Safety C erstellt werden (dies kann nur Des Weiteren kann das Projekt zukünftig
Der in TwinCAT 3 integrierte Safety-Editor für die Safety-Runtime erfolgen). Safety C offline simuliert werden, um die Inbetrieb-
erlaubt die Erstellung einer Sicherheitsappli- stellt ein nahezu uneingeschränktes Derivat nahme vor Ort deutlich zu verkürzen bzw.
kation in einer freigrafischen Umgebung. von Standard C dar. Dadurch können für zu vereinfachen.
Die gewünschte Logik wird mit Hilfe eines Safety-Applikationen bekannte Kontroll- Der Editor verfügt über einen auto-
FBD programmiert. Zur besseren Übersicht- konstrukte, wie beispielsweise IF-THEN-ELSE, matischen Verifikationsmechanismus, der
lichkeit kann die Anwendung in Netzwerken SWITCH-CASE sowie die unter C üblichen selbstständig überprüft, ob das gespeicherte
organisiert werden. Als Elemente der Logik Datentypen, verwendet werden. Projekt dem im Editor erstellten entspricht.
können die bereits von den Logic-Komponen- Eine wesentliche Neuerung bei der Der bisher gewohnte manuelle Vergleich
ten bekannten Funktionsbausteine genutzt Programmierung sicherheitstechnischer durch einen erneuten Upload des Projektes
werden (digitale Funktionsbausteine für Anwendungen unter TwinCAT 3 ist die der Sicherheitssteuerung entfällt somit.
KL6904 und EL69xx; zusätzlich analoge Funk- erweiterte Benutzerverwaltung. Im soge- Der Safety-Editor generiert zudem auto-
TwinSAFE
tionsbausteine für EL6910, EJ6910, EK1960, nannten Basic-Mode kann der Benutzer eine matisch eine Dokumentation, welche alle
AX8xxx-x1xx, AX8xxx-x2xx etc.). Anwendung nur aus vorgegebenen – und relevanten Daten des Projektes detailliert
536 Der Safety-Editor bietet eine erhöhte somit zertifizierten – Funktionsbausteinen enthält. Von der Darstellung der Hardware-
Flexibilität und Portabilität. Dies wird erreicht erstellen. Dazu zählen auch von ihm erstellte klemmen mit sicherheitsrelevanten Einstel-
durch eine zunächst von der physikalisch Funktionsbausteine, die auf vorzertifizierten lungen bis hin zu einer genauen Auflistung
verwendeten Hardware unabhängigen Bausteinen basieren. Im Expert-Mode hin- und Verschaltung der verwendeten Funk-
Programmierung. Hierzu werden sowohl gegen ist es möglich, Funktionsbausteine auch tionsbausteine sind alle wichtigen Daten
das Zielsystem als auch alle Ein- und Aus- in Safety C zu erstellen und somit eigene enthalten, um die Verdrahtung der Anlage,
gangsgeräte als sogenannte Alias-Geräte zur Bibliotheken anzulegen. Vor dem Laden in die Fehlersuche und die Instandhaltung zu
Verfügung gestellt. Auf dieser Ebene können die Sicherheitssteuerung wird überprüft, ob erleichtern.
alle sicherheitsrelevanten Einstellungen be- die programmierte Logik aus bereits zerti-
reits im Voraus getätigt werden. Bevor das fizierten Funktionsbausteinen besteht oder
Technische Änderungen vorbehalten
Ansicht des freigrafischen
Safety-Editors für TwinCAT 3
TwinCAT Safety PLC
Die enorme Weiterentwicklung auf dem Gebiet
der Industrie-PCs und die damit verbundene
gesteigerte Zuverlässigkeit und Qualität
erlaubt den Einsatz eines Standard-Industrie-
PCs als Sicherheitssteuerung. Ermöglicht
wird dies durch eine streng mathematische
Grundlage, sodass der Nachweis der Sicherheit
nicht auf den jeweiligen Prozessor und dessen
Umgebung Bezug nehmen muss. Die dadurch Konfiguration des Zielsystems
geschaffene Unabhängigkeit von der zugrunde
liegenden Hardware ermöglicht den Einsatz der
Standardkomponenten bis zu einem SIL 3 nach
IEC 61508.
Zum Einsatz kommt dabei eine mathe-
matische Codierung, die der Erzeugung einer
diversitären Datenredundanz dient, anhand
dessen die korrekte Ausführung von Opera-
tionen innerhalb der Sicherheitsapplikation
überprüft und im Fehlerfall eine sichere Reak-
tion eingeleitet werden kann. Neben vorge-
gebenen Funktionsbausteinen können dabei
durch die Verwendung von Safety C eigene
TwinSAFE
Funktionsbausteine erstellt und für spätere
Verwendung in einer Bibliothek hinterlegt
werden. 537
Weitere Informationen zu TwinCAT 3 Die automatisch generierte
auf Seite 458 oder unter Dokumentation zeigt alle
www.beckhoff.de/TwinCAT3 relevanten Daten des
Projektes detailliert an.
Technische Änderungen vorbehalten
Controller EK1960
TwinSAFE | Compact-Controller
Der TwinSAFE-Compact-Controller EK1960 Compact-Controller mit den TwinSAFE-I/O- als Standard-, TwinSAFE-SC- oder Safety-
erweitert das Anwendungsspektrum der inte- Komponenten in IP 20 und IP 67 und den over-EtherCAT-Signal an die Logik übergeben
grierten Sicherheitslösung TwinSAFE. Dank TwinSAFE-Drive-Optionskarten kombiniert werden. Damit können analoge Signale
seiner kompakten Bauweise mit 20 sicheren werden. innerhalb der Logik plausibilisiert werden.
Digital-Eingängen und 24 sicheren Digital- Das feldbusneutrale Safety-Protokoll Die gesamte Berechnung und Skalierung
Ausgängen deckt er besonders die sicher- Safety-over-EtherCAT ermöglicht die Inte- wird im sicherheitsgerichteten TwinSAFE-
heitstechnischen Anforderungen kompakter gration von TwinSAFE-Geräten in beliebige Compact-Controller EK1960 auf dem Sicher-
Maschinen ab. Der EK1960 kann „stand- Feldbussysteme. Die Safety-I/Os sind die heitsniveau SIL 3/PL e durchgeführt.
alone“ oder durch die EtherCAT-Anschlüsse Schnittstellen zu der sicherheitsrelevanten Für die Verarbeitung von analogen
mit anderen Steuerungen vernetzt betrieben Sensorik und Aktorik. Durch die Möglichkeit, Signalen stehen zertifizierte Bausteine, wie
werden. Wird der Koppler in einem EtherCAT- die sicherheitsrelevanten Signale mit einem ADD, SUB, MUL, DIV, aber auch komplexere,
Netzwerk betrieben, kann er, wie jeder Standard-Bussystem übertragen zu können, wie Counter, Limit oder Compare zur Verfü-
EtherCAT-Koppler, mit allen EL/ES-Klemmen ergeben sich erhebliche Vorteile im Bereich gung.
erweitert werden. Als Stand-Alone Gerät ist Planung, Installation, Betrieb, Wartung,
er nicht mit Klemmen erweiterbar. Diagnose und bei den Kosten.
Die Programmierung des TwinSAFE- Der EK1960 unterstützt neben dem
Compact-Controllers erfolgt wie bei den Safety-over-EtherCAT-Protokoll auch die
anderen TwinSAFE-Komponenten auch über TwinSAFE-SC-Technologie. Damit ist eine
den TwinCAT Safety Editor. Ein TwinSAFE- gesicherte Datenübertragung von TwinSAFE-
Projekt wird erstellt und über EtherCAT in SC-Klemmen zum TwinSAFE-Compact-
den EK1960 geladen. Der EK1960 unterstützt Controller EK1960 möglich.
den Aufbau von 128 TwinSAFE-Connections. Der EK1960 unterstützt auch die Ver-
Zur flexiblen Anpassung an unterschiedliche arbeitung von analogen Signalen (16/32 Bit,
Sicherheitsaufgaben kann der TwinSAFE- signed und unsigned). Diese Signale können
TwinSAFE
538
EK1960 mit M8-Businterface
Technische Änderungen vorbehalten
EK1960 Controller
TwinSAFE-Compact-Controller,
20 sichere Digital-Eingänge (24 V DC),
24 sichere Digital-Ausgänge (24 V DC)
Technische Daten EK1960
Aufgabe im – Stand-Alone TwinSAFE-Compact-Controller (ohne EtherCAT-Netzwerk)
EtherCAT-System – TwinSAFE-Compact-Controller mit Einbindung in ein EtherCAT-Netzwerk zur Kommunikation und Diagnose
(erweiterbar mit sicheren und Standard-EtherCAT-Klemmen)
– TwinSAFE-I/O-Modul ohne Verwendung der Logik-Funktion
Anzahl bis zu 65.534
EtherCAT-Klemmen
Übertragungsraten 100 MBit/s
Sicherheitsstandard EN ISO 13849-1:2015 (Cat 4, PL e) und EN 61508:2010 (SIL 3)
Businterface 2 x RJ45 oder 2 x M8
Art/Anzahl max. 4,2 GB adressierbare I/O-Punkte
Peripheriesignale
Übertragungsmedium Ethernet/EtherCAT-Kabel (min. Cat.5), geschirmt
Länge zwischen Stationen 100 m (100BASE-TX)
Durchlaufverzögerung ca. 1 µs
Anzahl max. 128
Kommunikationspartner
Protokoll EtherCAT
Safety-Protokoll TwinSAFE/Safety-over-EtherCAT
TwinSAFE
Funktionsblöcke max. 512
Reaktionszeit applikationsabhängig (< 15 ms)
Fehlerreaktionszeit ≤ Watchdog-Zeit (parametrierbar)
539
Anzahl Eingänge 20
Anzahl Ausgänge 24
Ausgangsstrom max. 2 A (Gleichzeitigkeitsfaktor 50 % bei 2 A)
Stromversorgung E-Bus 500 mA
Betriebs-/Lagertemperatur -25…+55 °C/-40…+70 °C
Zulassungen CE, TÜV SÜD
Weitere Informationen www.beckhoff.de/EK1960
Technische Änderungen vorbehaltenKoppler EK1914
TwinSAFE | Koppler
Der EtherCAT-Koppler EK1914 verbindet EtherCAT-Koppler
die Funktionalitäten des EtherCAT-Kopplers mit 4 Ein- und 4 Ausgängen
EK1100 mit Standard- und sicheren Digital- sowie 2 sicheren Ein- und
I/Os. Die daraus resultierende kompakte 2 sicheren Ausgängen
Bauform bietet sich insbesondere für
Anwendungen mit geringer I/O-Anzahl an. Technische Daten EK1914
Der EK1914 kann mit allen EL/ES-Klemmen
erweitert werden. Aufgabe im Ankopplung von EtherCAT-Klemmen (ELxxxx)
Der EK1914 verfügt über vier digitale EtherCAT-System an 100BASE-TX-EtherCAT-Netze
Eingänge und vier digitale Ausgänge sowie Anzahl bis zu 65.534
zwei fehlersichere Eingänge und zwei feh- EtherCAT-Klemmen
lersichere Ausgänge. Die sicheren Ausgänge Übertragungsraten 100 MBit/s
schalten 24-V-DC-Aktoren mit bis zu 0,5 A
Strom pro Kanal. Der EK1914 entspricht Sicherheitsstandard DIN EN ISO 13849-1:2008 (Cat 4, PL e)
den Anforderungen der DIN EN ISO 13849-
1:2008 (Cat 4, PL e).
Sys 24 V Sys 0 V
1 9
2 10
3 11
Pwr 24 V
4 12
5 13
Pwr 0 V
6 14
7 15
8 16
Protokoll EtherCAT
Businterface 2 x RJ45
Übertragungsmedium Ethernet/EtherCAT-Kabel (min. Cat.5), geschirmt
Nennspannung 24 V DC (-15 %/+20 %) (PELV)
Stromaufnahme typ. 72 mA (ohne Stromaufnahme der Sensoren/Aktoren
und weiteren Klemmen am E-Bus)
Länge zwischen Stationen max. 100 m (100BASE-TX)
Durchlaufverzögerung ca. 1 µs
Safety-Protokoll TwinSAFE/Safety-over-EtherCAT
Reaktionszeit typ. 4 ms (Eingang lesen, auf E-Bus schreiben)
TwinSAFE
max. siehe Fehlerreaktionszeit
Fehlerreaktionszeit ≤ Watchdog-Zeit
Anzahl Eingänge 6 digitale Eingänge, davon 2 sichere Eingänge
540
Anzahl Ausgänge 6 digitale Ausgänge, davon 2 sichere Ausgänge
Stromversorgung E-Bus max. 500 mA (für höhere Stromaufnahme
Einspeiseklemme EL9410 verwenden)
Betriebs-/Lagertemperatur 0…+55 °C/-25…+70 °C
Zulassungen CE, UL, TÜV SÜD
Gewicht ca. 123 g
Weitere Informationen www.beckhoff.de/EK1914
Technische Änderungen vorbehaltenEL69xx, EJ6910 Logic
TwinSAFE | Logic
TwinSAFE-Logic, TwinSAFE/PROFIsafe-Logic- TwinSAFE-Logic, TwinSAFE-Logic,
EtherCAT-Klemme und -Gateway-Klemme, EtherCAT-Klemme EtherCAT-Steckmodul
EtherCAT-Klemme
Technische Daten EL6900 EL6930 EL6910 EJ6910
Technik TwinSAFE-Logic TwinSAFE/PROFIsafe-Logic- TwinSAFE-Logic
und -Gateway-Klemme
Sicherheitsstandard DIN EN ISO 13849-1:2008 (Cat 4, PL e) und EN ISO 13849-1:2015 (Cat 4, PL e) und
EN 61508:2010 (SIL 3) EN 61508:2010 (SIL 3)
Die TwinSAFE-Logic kann Die Logic-Klemme EL6930 Die TwinSAFE-Logic kann Die TwinSAFE-Logic kann
128 Verbindungen zu kann 127 Verbindungen zu 212 Verbindungen zu 212 Verbindungen zu
anderen TwinSAFE-Geräten anderen TwinSAFE/Safety- anderen TwinSAFE-Geräten anderen TwinSAFE-Geräten
aufbauen. over-EtherCAT-Geräten und aufbauen. aufbauen.
eine PROFIsafe-Slave-Verbin-
dung zu einem PROFIsafe-
Master aufbauen.
Protokoll TwinSAFE/Safety-over- TwinSAFE/Safety-over- TwinSAFE/Safety-over- TwinSAFE/Safety-over-
EtherCAT EtherCAT, PROFIsafe EtherCAT EtherCAT
Stromaufn. Powerkontakte – – – –
Stromaufnahme E-Bus ca. 188 mA ca. 188 mA ca. 160 mA ca. 222 mA
TwinSAFE
Zykluszeit 500 µs…~25 ms 500 µs…~25 ms ca. 1 ms/entsprechend ca. 1 ms/entsprechend
Projektgröße Projektgröße
Fehlerreaktionszeit ≤ Watchdog-Zeit ≤ Watchdog-Zeit ≤ Watchdog-Zeit ≤ Watchdog-Zeit
541
(parametrierbar) (parametrierbar) (parametrierbar) (parametrierbar)
Besondere Eigenschaften Backup-Restore 1 PROFIsafe-Slave- Backup-Restore, Analog- Backup-Restore, Analog-
Verbindung werte, Customizing werte, Customizing
Betriebs-/Lagertemperatur -25…+55 °C/-40…+70 °C -25…+55 °C/-40…+70 °C -25…+55 °C/-40…+70 °C 0…+55 °C/-25…+85 °C
Zulassungen CE, UL, Ex, TÜV SÜD CE, TÜV SÜD CE, cULus, TÜV SÜD CE, TÜV SÜD
Gewicht ca. 50 g ca. 50 g ca. 50 g ca. 27 g
Weitere Informationen www.beckhoff.de/EL6900 www.beckhoff.de/EL6930 www.beckhoff.de/EL6910 www.beckhoff.de/EJ6910
Technische Änderungen vorbehaltenDigital-Eingang EL1904, EP1908
TwinSAFE | EtherCAT-I/O – Digital-Eingang
4-Kanal-Digital- 8-Kanal-Digital-
Eingangsklemme, Eingangsmodul,
TwinSAFE, 24 V DC, TwinSAFE, 24 V DC,
EtherCAT-Klemme EtherCAT Box
Technische Daten EL1904 EP1908-0002
Anschlusstechnik 1-/2-Leiter M12, schraubbar
Sicherheitsstandard DIN EN ISO 13849-1:2008 (Cat 4, PL e) EN ISO 13849-1:2008 (Cat 4, PL e)
und EN 61508:2010 (SIL 3) und EN 61508:2010 (SIL 3)
Ausgangsstrom max. – –
Anzahl Eingänge 4 8
Anzahl Ausgänge – –
+60 °C
-25 °C
Ch 1
2 3
Ch 2
1 5 1 4
5
2 6
3 7
4 8
Protokoll TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT
TwinSAFE
Stromaufn. Powerkontakte siehe Dokumentation –
Stromaufnahme E-Bus ca. 200 mA –
Stromaufnahme aus US/UP – 80 mA/40 mA
542
Reaktionszeit typ. 4 ms (Eingang lesen, auf E-Bus schreiben) typ. 4 ms (Eingang lesen, auf Bus schreiben)
Fehlerreaktionszeit ≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar)
Besondere Eigenschaften 4 sichere Eingänge 8 sichere Eingänge
Betriebs-/Lagertemperatur -25…+55 °C/-40…+70 °C -25…+60 °C/-40…+85 °C
Zulassungen CE, UL, Ex, TÜV SÜD CE, UL, TÜV SÜD
Gewicht ca. 50 g ca. 165 g
Weitere Informationen www.beckhoff.de/EL1904 www.beckhoff.de/EP1908
Technische Änderungen vorbehaltenEJ191x, EJ1957 Digital-Eingang
4-Kanal-Digital-Eingang, 8-Kanal-Digital-Eingang, 8-Kanal-Digital-Eingang,
TwinSAFE, 24 V DC, TwinSAFE, 24 V DC, 4-Kanal-Digital-Ausgang,
EtherCAT-Steckmodul EtherCAT-Steckmodul TwinSAFE, 24 V DC,
EtherCAT-Steckmodul
EJ1914 EJ1918 EJ1957
Distribution-Board
EN ISO 13849-1:2015 (Cat 4, PL e) und EN 61508:2010 (SIL 3)
– – 500 mA
4 8 8
– – 4
TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT
TwinSAFE
– – –
260 mA typ. 290 mA typ. 330 mA typ.
– – –
543
typ. 4 ms (Eingang lesen, auf E-Bus schreiben) typ. 4 ms (Eingang lesen, auf E-Bus schreiben) typ. 4 ms (Eingang lesen, auf E-Bus schreiben)
≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar)
4 sichere Eingänge 8 sichere Eingänge 8 sichere Eingänge, 4 sichere Ausgänge
0…+55 °C/-25…+85 °C 0…+55 °C/-25…+85 °C 0…+55 °C/-25…+85 °C
CE, TÜV SÜD CE, TÜV SÜD CE, TÜV SÜD
ca. 64 g ca. 64 g ca. 64 g
www.beckhoff.de/EJ1914 www.beckhoff.de/EJ1918 www.beckhoff.de/EJ1957
Technische Änderungen vorbehaltenDigital-Ausgang EL290x
TwinSAFE | EtherCAT-I/O – Digital-Ausgang
Potenzial- 2-Kanal-Digital- 4-Kanal-Digital-
einspeiseklemme, Ausgangsklemme, Ausgangsklemme,
TwinSAFE, 24 V DC, 10 A, TwinSAFE, 24 V DC, TwinSAFE, 24 V DC,
EtherCAT-Klemme EtherCAT-Klemme EtherCAT-Klemme
Technische Daten EL2901 EL2902 EL2904
Anschlusstechnik 1-/2-Leiter und/oder 1-Leiter 1-/2-Leiter
über Powerkontakte
Sicherheitsstandard DIN EN ISO 13849-1:2008 (Cat 4, PL e) und EN 61508:2010 (SIL 3)
Ausgangsstrom max. 10 A 2,3 A (pro Kanal) 0,5 A (pro Kanal), min. 20 mA
(bei eingeschalteter Strommessung)
Anzahl Eingänge – – –
Anzahl Ausgänge 1 2 4
1 5 1 5 1 5
2 6 2 6 2 6
3 7 3 7 3 7
4 8 4 8 4 8
TwinSAFE
Protokoll TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT
Stromaufn. Powerkontakte lastabhängig lastabhängig lastabhängig
Stromaufnahme E-Bus ca. 221 mA ca. 221 mA ca. 221 mA
544
Reaktionszeit – – –
Fehlerreaktionszeit ≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar)
Besondere Eigenschaften sichere Einspeisung 2 sichere Ausgänge 4 sichere Ausgänge
Betriebs-/Lagertemperatur 0…+55 °C/-40…+70 °C 0…+55 °C/-40…+70 °C -25…+55 °C/-40…+70 °C
Zulassungen CE, UL in Vorbereitung CE, UL in Vorbereitung CE, UL, Ex, TÜV SÜD
Gewicht ca. 90 g ca. 90 g ca. 90 g
Weitere Informationen www.beckhoff.de/EL2901 www.beckhoff.de/EL2902 www.beckhoff.de/EL2904
Verfügbarkeitsstatus siehe Beckhoff-Internetseite unter: www.beckhoff.de
Technische Änderungen vorbehaltenEJ1957, EJ291x Digital-Ausgang
8-Kanal-Digital-Eingang, 4-Kanal-Digital-Ausgang, 8-Kanal-Digital-Ausgang,
4-Kanal-Digital-Ausgang, TwinSAFE, 24 V DC, TwinSAFE, 24 V DC,
TwinSAFE, 24 V DC, EtherCAT-Steckmodul EtherCAT-Steckmodul
EtherCAT-Steckmodul
EJ1957 EJ2914 EJ2918
Distribution-Board
EN ISO 13849-1:2015 (Cat 4, PL e) und EN 61508:2010 (SIL 3)
500 mA 500 mA 500 mA
8 – –
4 4 8
TwinSAFE
TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT
– – –
330 mA typ. 260 mA typ. 310 mA typ.
545
typ. 4 ms (Eingang lesen, auf E-Bus schreiben) – –
≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar)
8 sichere Eingänge, 4 sichere Ausgänge 4 sichere Ausgänge 8 sichere Ausgänge
0…+55 °C/-25…+85 °C 0…+55 °C/-25…+85 °C 0…+55 °C/-25…+85 °C
CE, TÜV SÜD CE, TÜV SÜD CE, TÜV SÜD
ca. 64 g ca. 47 g ca. 62 g
www.beckhoff.de/EJ1957 www.beckhoff.de/EJ2914 www.beckhoff.de/EJ2918
Technische Änderungen vorbehaltenLogic KL6904
TwinSAFE | Logic-Busklemme
TwinSAFE ermöglicht ein Netzwerk mit TwinSAFE-Logic-Busklemme,
bis zu 1024 TwinSAFE-Geräten. Die Bus- 4 sichere Ausgänge
klemme KL6904 besitzt zertifizierte Sicher-
heitsfunktionsbausteine, die entsprechend
der zu realisierenden Applikation konfi-
guriert werden. Funktionen, wie Not-Halt, Technische Daten KL6904
Schutztürüberwachung usw., können so sehr
einfach angewählt und verknüpft werden. Technik TwinSAFE-Logic
Alle Bausteine sind untereinander verschalt-
bar und werden durch Operatoren, wie AND, Sicherheitsstandard DIN EN ISO 13849-1:2008 (Cat 4, PL e)
OR usw., ergänzt. Die benötigten Funktionen und EN 61508:2010 (SIL 3)
werden mit dem TwinCAT System Manager Anzahl Ausgänge 4
konfiguriert und über den Feldbus in die
Klemme geladen.
1 5
2 6
3 7
4 8
Die TwinSAFE-Logic-Busklemme KL6904 kann bis zu 15 Ver-
bindungen (TwinSAFE-Connection) aufbauen. Die TwinSAFE-
Logic-Klemme besitzt vier sichere, lokale Ausgänge, sodass
mit nur zwei Komponenten (KL1904 und KL6904) bereits eine
Sicherheitsapplikation realisiert werden kann.
Protokoll TwinSAFE/Safety-over-EtherCAT
Nennspannung 24 V DC (-15 %/+20 %)
Stromaufn. Powerkontakte lastabhängig
Stromaufnahme K-Bus 250 mA
TwinSAFE
Zykluszeit 4…100 ms
Fehlerreaktionszeit ≤ Watchdog-Zeit (parametrierbar)
Ausgangsstrom 0,5 A max./20 mA min. (pro Kanal)
546
Besondere Eigenschaften 4 sichere Ausgänge
Betriebs-/Lagertemperatur 0…+55 °C/-25…+70 °C
Zulassungen CE, UL, Ex, TÜV SÜD
Gewicht ca. 90 g
Weitere Informationen www.beckhoff.de/KL6904
Sonderklemmen KL6904-0001
Unterscheidungsmerkmale werkseitig auf 15 TwinSAFE-Verbindungen eingestellt
Technische Änderungen vorbehaltenKL1904, KL2904 Digital-I/O
TwinSAFE | Busklemmen-I/O
4-Kanal-Digital- 4-Kanal-Digital-
Eingangsklemme, Ausgangsklemme,
TwinSAFE, 24 V DC, TwinSAFE, 24 V DC,
Busklemme Busklemme
Technische Daten KL1904 Technische Daten KL2904
Anschlusstechnik 2-Leiter Anschlusstechnik 2-Leiter
Sicherheitsstandard DIN EN ISO 13849-1:2008 (Cat 4, PL e) Sicherheitsstandard DIN EN ISO 13849-1:2008 (Cat 4, PL e)
und EN 61508:2010 (SIL 3) und EN 61508:2010 (SIL 3)
Anzahl Eingänge 4 Ausgangsstrom max. 0,5 A/20 mA min. (pro Kanal)
Anzahl Ausgänge – Anzahl Ausgänge 4
1 5 1 5
2 6 2 6
3 7 3 7
4 8 4 8
Die Safety-Busklemme KL1904 Die Safety-Busklemme KL2904
hat vier fehlersichere Eingänge. hat vier Ausgangskanäle.
Protokoll TwinSAFE/Safety-over-EtherCAT
Nennspannung 24 V DC (-15 %/+20 %) Protokoll TwinSAFE/Safety-over-EtherCAT
TwinSAFE
Stromaufn. Powerkontakte – Nennspannung 24 V DC (-15 %/+20 %)
Stromaufnahme K-Bus 48 mA Stromaufn. Powerkontakte lastabhängig
Reaktionszeit typ. 4 ms (Eingang lesen, Stromaufnahme K-Bus 250 mA
547
auf K-Bus schreiben) Fehlerreaktionszeit ≤ Watchdog-Zeit
Fehlerreaktionszeit ≤ Watchdog-Zeit (parametrierbar) (parametrierbar)
Besondere Eigenschaften 4 sichere Eingänge Besondere Eigenschaften 4 sichere Ausgänge
Betriebs-/Lagertemperatur 0…+55 °C/-25…+70 °C Betriebs-/Lagertemperatur 0…+55 °C/-25…+70 °C
Zulassungen CE, UL, Ex, TÜV SÜD Zulassungen CE, UL, Ex, TÜV SÜD
Gewicht ca. 50 g Gewicht ca. 100 g
Weitere Informationen www.beckhoff.de/KL1904 Weitere Informationen www.beckhoff.de/KL2904
Technische Änderungen vorbehaltenTwinSAFE | Sichere Antriebstechnik
Dynamische Bewegungen der in einer Applikation, aus TwinCAT. Alle anlagenspezi- – Beschleunigungsfunktionen (SAR, SMA)
Maschine genutzten elektrischen Antriebs- fischen Einstellungen werden zusammen mit – Drehrichtungsfunktionen (SDIp, SDIn)
technik können wesentliche Gefährdungen der Applikation in der TwinSAFE-Logic-Kom- Folgende TwinSAFE-Komponenten unter-
für Personen und die Umwelt darstellen. ponente gespeichert. Daher ist ein Austausch stützen das Funktionspaket Safe Motion:
Aus normativer Sicht muss die Antriebs- der sicheren Antriebskomponenten jederzeit – Stand-alone-Servoverstärker AX5000
technik sicherheitsgerichtet betrachtet ohne Softwareänderung möglich. Die jewei- mit Optionskarten AX5805-0000,
werden, indem bestimmte Bewegungen lige Komponente erhält beim nächsten Ein- AX5806-0000
und Abläufe koordiniert und überwacht schalten bzw. Hochlauf alle für den Betrieb – Multiachs-Servosystem AX8000 mit
werden. Die durchgängige Sicherheits- notwendigen Parameter. TwinSAFE-Achsmodule AX81xx-x2xx
lösung TwinSAFE ermöglicht die Realisierung und AX82xx-x2xx
sicherer Antriebstechnik in drei Abstufungen, STO/SS1 gemäß IEC 61800-5-2
die der Komplexität der Maschine entspre- Die Sicherheitsfunktionen Safe Torque Off Die oben genannten Sicherheitsfunktionen
chen. (STO | sicher abgeschaltetes Moment) und können beim AX5000 mit den Optionskarten
Die sicheren Antriebskomponenten Safe Stop 1 (SS1 | überwachtes Bremsen, AX58xx realisiert werden. Zur Realisierung
sind in der Lage, den Motor momentenfrei STO nach Zeit oder Stillstand) gemäß der Funktion SDI (sichere Bewegungsrich-
zu schalten oder Geschwindigkeit, Position IEC 61800-5-2 können mit folgenden tung) oder SLS (sicher begrenzte Geschwin-
und Drehrichtung zu überwachen (gemäß TwinSAFE-Komponenten realisiert werden: digkeit) ist kein spezielles Gebersystem
EN ISO 13849-1:2015 (Cat 4, PL e)). Dazu sind – Stand-alone-Servoverstärker AX5000 notwendig; viele Beckhoff-Standardmotoren
keine weiteren Beschaltungen wie Schütze mit Optionskarte AX5801-0200 unterstützen diese Funktionen ohne weiteren
bzw. Schützkontakte in den Versorgungs- – Multiachs-Servosystem AX8000 mit Aufwand und zusätzliches Gebersystem
leitungen notwendig. Dies ermöglicht eine TwinSAFE-Achsmodulen AX81xx-x1xx, bei Verwendung des AX5000. Detaillierte
sehr schlanke Installation und hilft Kosten AX82xx-x1xx Auflistung der zulässigen Motoren unter
und Schaltschrankraum zu reduzieren. – Servoklemmen EL72xx-9014 u www.beckhoff.de/Dokumentation.
TwinSAFE
Sogar eine sichere Positionsüberwachung – Servomotor-Box EP7211-9034
bzw. Positionsbereichsüberwachung ist mit- Beim AX8000 kann mit der Bestelloption
548 hilfe der sicheren Antriebstechnik einfach zu Safe Motion gemäß IEC 61800-5-2 AX8xxx-x2xx zusätzlich die Funktion SBC
realisieren. Es entsteht dadurch keine zusätz- Mithilfe des Funktionspaketes Safe Motion (Safe Break Control) implementiert werden.
liche Verdrahtung, da die EtherCAT-Kommuni- können komplexere Sicherheitsfunktionen
kation in den Servoverstärkern benutzt wird, realisiert werden: Programmierbare, sichere Antriebs-
sodass ausgehend von der sicheren Antriebs- – Stopp-Funktionen (STO, SOS, SS1, SS2) technik durch integrierte Logic
technik direkt mit den TwinSAFE-Logic- – Geschwindigkeitsfunktionen Der Multiachs-Servoverstärker AX8000
Komponenten kommuniziert werden kann. (SLS, SSM, SSR, SMS) mit bis zu umfasst neue Funktionen der sicheren
Die gesamte Parametrierung der sicheren 8 Geschwindigkeiten Antriebstechnik mit TwinSAFE: Mit der
Antriebstechnik erfolgt, wie auch die Pro- – Positionsfunktionen (SLP, SCA, SLI) Bestelloption -0100 und -0200 enthalten die
grammierung bzw. Konfiguration der Safety- mit Referenznocken Achsmodule AX8108, AX8118 und AX8206
Technische Änderungen vorbehalteneine programmierbare TwinSAFE-Logic ent- Multiachs-Servoverstärker AX8000
sprechend einer EL6910 und ermöglichen siehe Seite 330
die direkte Implementierung der Sicherheits-
applikation im Servoverstärker. Der Anwender Digital Kompakt Servoverstärker AX5000
erhält bei der Umsetzung der Sicherheits- siehe Seite 338
applikation in der Antriebstechnik mehr Frei-
heitsgrade und kann durch die Flexibilität der Kompakte Antriebstechnik
Programmierung die sichere Antriebstechnik siehe Seite 396
gezielt auf die Anlage auslegen.
Mit den TwinSAFE-Achsmodulen mit
der Bestelloption -0100 (STO/SS1) können
die sicheren Antriebsfunktionen STO und SS1
realisiert werden. Diese Funktionen können
sowohl über eine feste Verdrahtung als auch
über FSoE initiiert werden. Für TwinSAFE-
Achsmodule mit der Bestelloption -0200
(Safe Motion) stehen zur Implementierung
einer applikationsspezifischen Sicherheits-
funktion verschiedene antriebsinterne Signale
zur Verfügung. Wie von der EL6910 gewohnt,
können innerhalb der TwinSAFE-Achsmodule
-0100 und -0200 interne und externe Signale
in Verbindung mit den bekannten vorzerti-
TwinSAFE
fizierten Funktionsbausteinen genutzt wer-
den, um komplexe Antriebsfunktionen zu
realisieren. Abhängig vom Anwendungsfall 549
kann eine Vorverarbeitung der sicherheits-
gerichteten Informationen direkt im Antrieb
erfolgen, sodass die zentrale TwinSAFE-Logic
nur noch die dort aggregierten Informationen
verarbeiten muss.
Technische Änderungen vorbehaltenAntriebstechnik STO/SS1
TwinSAFE-Komponenten zur Realisierung von STO/SS1
Servomotorklemme Servomotorklemme Servomotorklemme
mit OCT und STO, mit OCT und STO, mit OCT und STO, 50 V DC,
50 V DC, 2,8 A (Ieff) 50 V DC, 4,5 A (Ieff) 7…8 A (Ieff), für den Betrieb
mit Lüftermodul ZB8610
Technische Daten EL7201-9014 EL7211-9014 EL7221-9014
Technik Kompakte Antriebstechnik
Funktion Servoverstärker in IP 20 für eine Antriebsachse
Protokoll EtherCAT EtherCAT EtherCAT
Sicherheitsstandard DIN EN ISO 13849-1:2015 DIN EN ISO 13849-1:2015 DIN EN ISO 13849-1:2015
(Cat 3, PL d) (Cat 3, PL d) (Cat 3, PL d)
Anzahl Eingänge 2 x Endlage, 1 x Feedback, 1 x STO 2 x Endlage, 1 x Feedback, 1 x STO 2 x Endlage, 1 x Feedback, 1 x STO
Realisierung STO fest verdrahtet über sicheren fest verdrahtet über sicheren fest verdrahtet über sicheren
Ausgang Ausgang Ausgang
Stoppfunktionen Sicher abgeschaltetes Moment (STO), Sicher abgeschaltetes Moment (STO), Sicher abgeschaltetes Moment (STO),
Sicherer Stopp 1 (SS1) Sicherer Stopp 1 (SS1) Sicherer Stopp 1 (SS1)
TwinSAFE
550
Ausgangsstrom (eff.) 2,8 A 4,5 A 7…8 A nur mit ZB8610
Fehlerreaktionszeit siehe Dokumentation siehe Dokumentation siehe Dokumentation
Gewicht ca. 60 g ca. 95 g ca. 95 g
Betriebstemperatur 0…+55 °C 0…+55 °C 0…+55 °C
Zulassungen CE, UL, TÜV SÜD CE, UL, TÜV SÜD CE, TÜV SÜD
Weitere Informationen www.beckhoff.de/EL7201-9014 www.beckhoff.de/EL7211-9014 www.beckhoff.de/EL7221-9014
Technische Änderungen vorbehaltenSTO/SS1 Antriebstechnik
Servomotormodul TwinSAFE-Drive-Optionskarte Einachs-Modul 8 A/18 A, Doppelachs-Modul 2 x 6 A,
mit OCT und STO, für AX5000 bis 40 A, Feedback: OCT, TwinSAFE: STO/SS1, Feedback: OCT, TwinSAFE: STO/SS1,
50 V DC, 4,5 A (Ieff) HW 2.0: STO, SS1 integrierte TwinSAFE-Logic integrierte TwinSAFE-Logic
EP7211-9034 AX5801-0200 AX81xx-0100 AX82xx-0100
Digital Kompakt Servoverstärker Multiachs-Servosystem
Optionskarte Achsmodul für eine Antriebsachse Achsmodul für zwei Antriebsachsen
EtherCAT – TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT
DIN EN ISO 13849-1:2015 ISO 13849-1:2006 (Cat 4, PL e) und EN ISO 13849-1:2015 (Cat 4, PL e) EN ISO 13849-1:2015 (Cat 4, PL e)
(Cat 3, PL d) IEC 61508 (ed.2) (SIL 3) und IEC 61508:2010 (SIL 3) und IEC 61508:2010 (SIL 3)
2 x Endlage, 1 x Feedback, 1 x STO 1 x STO (2-kanalig), 2 x digitale Eingänge pro Kanal 2 x digitale Eingänge pro Kanal
1 x Rückführkreis (X15, X25) (X15, X25)
fest verdrahtet über sicheren fest verdrahtet über sicheren durch TwinSAFE-Logic per FSoE durch TwinSAFE-Logic per FSoE
Ausgang Ausgang initiiert oder fest verdrahtet über initiiert oder fest verdrahtet über
sicheren Ausgang sicheren Ausgang
Sicher abgeschaltetes Moment (STO), Sicher abgeschaltetes Moment (STO), Sicher abgeschaltetes Moment (STO), Sicher abgeschaltetes Moment (STO),
Sicherer Stopp 1 (SS1) Sicherer Stopp 1 (SS1) Sicherer Stopp 1 (SS1) Sicherer Stopp 1 (SS1)
+60 °C
-25 °C
TwinSAFE
551
4,5 A – AX8101: 8 A, AX8118: 18 A 2x6 A
siehe Dokumentation – ≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar)
ca. 440 g ca. 85 g AX8108: 2,0 kg, AX8118: 2,5 kg ca. 2,0 kg
-25…+60 °C 0…+55 °C 0…+55 °C 0…+55 °C
CE, UL in Vorbereitung, TÜV SÜD CE, UL, TÜV SÜD CE, UL in Vorbereitung, TÜV SÜD CE, UL in Vorbereitung, TÜV SÜD
(Zertifizierung in Vorbereitung)
www.beckhoff.de/EP7211-9034 www.beckhoff.de/AX5801 www.beckhoff.de/AX81xx www.beckhoff.de/AX82xx
Technische Änderungen vorbehaltenAntriebstechnik Safe Motion
TwinSAFE-Komponenten zur Realisierung von Safe Motion
TwinSAFE-Drive-Optionskarte TwinSAFE-Drive-Optionskarte
für AX5000 ab 60 A, Safe Motion
Technische Daten AX5805-0000 AX5806-0000
Technik Digital Kompakt Servoverstärker
Funktion Optionskarte
Protokoll TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT
Sicherheitsstandard EN ISO 13849-1:2006 (Cat 4, PL e) und EN 61508:2010 (SIL 3) EN ISO 13849-1:2006 (Cat 4, PL e) und EN 61508:2010 (SIL 3)
Anzahl Eingänge – –
Realisierung STO durch TwinSAFE-Logic per FSoE initiiert durch TwinSAFE-Logic per FSoE initiiert
Stoppfunktionen Sicher abgeschaltetes Moment (STO), Sicherer Stopp 1 (SS1), Sicher abgeschaltetes Moment (STO), Sicherer Stopp 1 (SS1),
Sicherer Stopp 2 (SS2), Sicherer Betriebshalt (SOS) Sicherer Stopp 2 (SS2), Sicherer Betriebshalt (SOS)
Positionsfunktionen Sicher begrenzte Position (SLP), Sicherer Nocken (SCA), Sicher begrenzte Position (SLP), Sicherer Nocken (SCA),
Sicher begrenztes Schrittmaß (SLI) Sicher begrenztes Schrittmaß (SLI)
Geschwindigkeits- Sicherer Geschwindigkeitsbereich (SSR), Sicherer Geschwindigkeitsbereich (SSR),
funktionen Sicher begrenzte Geschwindigkeit (SLS), Sicher begrenzte Geschwindigkeit (SLS),
Sichere Geschwindigkeitsüberwachung (SSM) Sichere Geschwindigkeitsüberwachung (SSM)
Drehrichtungsfunktionen Sichere Drehrichtung positiv (SDIp), Sichere Drehrichtung positiv (SDIp),
Sichere Drehrichtung negativ (SDIn) Sichere Drehrichtung negativ (SDIn)
Beschleunigungs- Sicherer Maximalbeschleunigung (SMA), Sicherer Maximalbeschleunigung (SMA),
funktionen Sicherer Beschleunigungsbereich (SAR) Sicherer Beschleunigungsbereich (SAR)
Bremsfunktionen – –
TwinSAFE
552
Ausgangsstrom (eff.) Servoverstärker bis 40 A Servoverstärker ab 60 A
Fehlerreaktionszeit ≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar)
Gewicht ca. 75 g ca. 75 g
Betriebstemperatur 0…+50 °C 0…+40 °C
Zulassungen CE, UL, TÜV SÜD CE, UL, TÜV SÜD
Weitere Informationen www.beckhoff.de/AX5805 www.beckhoff.de/AX5806
Technische Änderungen vorbehaltenSafe Motion Antriebstechnik
Einachs-Modul 8 A/18 A, Doppelachs-Modul 6 A,
Feedback: OCT, TwinSAFE: Safe Motion, Feedback: OCT, TwinSAFE: Safe Motion,
integrierte TwinSAFE-Logic integrierte TwinSAFE-Logic
AX81xx-0200 AX82xx-0200
Multiachs-Servosystem
Achsmodul für eine Antriebsachse Achsmodul für zwei Antriebsachsen
TwinSAFE/Safety-over-EtherCAT TwinSAFE/Safety-over-EtherCAT
EN ISO 13849-1:2015 (Cat 4, PL e) und IEC 61508:2010 (SIL 3) EN ISO 13849-1:2015 (Cat 4, PL e) und IEC 61508:2010 (SIL 3)
2 x digitale Eingänge pro Kanal (X15, X25) 2 x digitale Eingänge pro Kanal (X15, X25)
durch TwinSAFE-Logic per FSoE initiiert oder durch TwinSAFE-Logic per FSoE initiiert oder
fest verdrahtet über sicheren Ausgang fest verdrahtet über sicheren Ausgang
Sicher abgeschaltetes Moment (STO), Sicherer Stopp 1 (SS1), Sicher abgeschaltetes Moment (STO), Sicherer Stopp 1 (SS1),
Sicherer Stopp 2 (SS2), Sicherer Betriebshalt (SOS) Sicherer Stopp 2 (SS2), Sicherer Betriebshalt (SOS)
Sicher begrenzte Position (SLP), Sicherer Nocken (SCA), Sicher begrenzte Position (SLP), Sicherer Nocken (SCA),
Sicher begrenztes Schrittmaß (SLI) Sicher begrenztes Schrittmaß (SLI)
Sicherer Geschwindigkeitsbereich (SSR), Sicherer Geschwindigkeitsbereich (SSR),
Sicher begrenzte Geschwindigkeit (SLS), Sicher begrenzte Geschwindigkeit (SLS),
Sichere Geschwindigkeitsüberwachung (SSM) Sichere Geschwindigkeitsüberwachung (SSM)
Sichere Drehrichtung positiv (SDIp), Sichere Drehrichtung positiv (SDIp),
Sichere Drehrichtung negativ (SDIn) Sichere Drehrichtung negativ (SDIn)
Sicherer Maximalbeschleunigung (SMA), Sicherer Maximalbeschleunigung (SMA),
Sicherer Beschleunigungsbereich (SAR) Sicherer Beschleunigungsbereich (SAR)
Sichere Bremsenansteuerung (SBC) Sichere Bremsenansteuerung (SBC)
TwinSAFE
553
AX8101: 8 A, AX8118: 18 A 2x6 A
≤ Watchdog-Zeit (parametrierbar) ≤ Watchdog-Zeit (parametrierbar)
AX8108: 2,0 kg, AX8118: 2,5 kg ca. 2,0 kg
0…+55 °C 0…+55 °C
CE, UL in Vorbereitung, TÜV SÜD (Zertifizierung in Vorbereitung) CE, UL in Vorbereitung, TÜV SÜD (Zertifizierung in Vorbereitung)
www.beckhoff.de/AX81xx www.beckhoff.de/AX82xx
Technische Änderungen vorbehaltenSie können auch lesen