ATLAS - SZENARIEN DES AUTOMATISIERTEN FAHRENS IN DER LOGISTIK - PROJEKTBERICHT ZUM ARBEITSPAKET 3
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
ATLaS – Szenarien des automatisierten Fahrens in der Logistik Projektbericht zum Arbeitspaket 3
ATLaS – Projektbericht zum Arbeitspaket 3 Dokumenteigenschaften Titel ATLaS – Szenarien des automatisierten Fahrens in der Logistik Betreff Projektbericht zum Arbeitspaket 3 Institut Institut für Verkehrsforschung, Abteilung Wirtschaftsverkehr (DLR-VF) Erstellt von Stephan Müller Beteiligte Sandra Lunkeit (TUHH/VPL), Carina Thaller Geprüft von Sandra Lunkeit (TUHH/VPL), Carina Thaller Freigabe von Sandra Lunkeit Datum 04.12.2018 Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 2 Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.doc
ATLaS – Projektbericht zum Arbeitspaket 3
Inhalt
1.1. Narrative Beschreibung des Basisszenarios und dessen Parameter _________________________________ 7
1.2. Die Logistikkette im Basisszenario __________________________________________________________ 9
2.1. Die Logistikkette im Szenario “Automated freight transport on highways” ___________________________ 13
2.2. Parametrisierung des Szenarios “Automated freight transport on highways” _________________________ 15
3.1. Die Logistikkette im Szenario „Automated Interfaces“ __________________________________________ 16
3.2. Parametrisierung des Szenarios „Automated Interfaces“ ________________________________________ 18
4.1. Das Szenario “Automated urban freight transport” für den Lebensmitteleinzelhandel __________________ 20
4.1.1. Die Logistikkette im Szenario “Automated urban freight transport” für den Lebensmitteleinzelhandel ____ 20
4.1.2. Parametrisierung des Szenarios “Automated urban freight transport” für den Lebensmitteleinzelhandel __ 21
4.2. Das Szenario “Automated urban freight transport” für den Paketmarkt _____________________________ 22
4.2.1. Die Logistikkette im Szenario “Automated urban freight transport” für den Paketmarkt _______________ 22
4.2.2. Parametrisierung des Szenarios “Automated urban freight transport” für den Paketmarkt _____________ 23
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 3
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3 Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 4 Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.doc
ATLaS – Projektbericht zum Arbeitspaket 3
Einleitung und Überblick über die Szenarien
Das automatisierte und vernetzte Fahren (AVF) ist ein Thema, das auch für die Produktion, die Logistik und den
Straßengüterverkehr von großer Bedeutung ist, da dort erhebliche Kostenvorteile und Prozessverbesserungen zu
erwarten sind. Ziel des Projektes ATLaS ist es, eine erfolgreiche Realisierung des automatisierten und vernetzten
Fahrens im Straßengüterverkehr zu unterstützen, indem die Voraussetzungen für dessen Akzeptanz und die
Umsetzungsbedingungen für den Einsatz dieser Technologien in Logistikketten untersucht werden.
Auf den Erkenntnissen der Arbeitspakete (AP) 1 (Analyse der Logistikketten) und AP 2 (Akzeptanzanalyse) werden in AP
3 (Entwicklung von Einsatzszenarien automatisierter und vernetzter, straßengebundener Logistikketten) narrative
Szenarien eines automatisierten und vernetzten Fahrens in Logistikketten formuliert. Diese berücksichtigen die
organisatorischen und technischen Veränderungen in den Logistikketten, die aus einem Regelbetrieb des
automatisierten und vernetzten Fahrens resultieren könnten. Die Szenarien werden im Folgearbeitspaket 4
(Wirkungsanalyse) modellgestützt hinsichtlich der Auswirkungen des Einsatzes von AVF analysiert.
In der Literatur werden vielfältige Entwicklungen der Logistikbranche und des Verkehrsablaufes für einen
automatisierten Straßengüterverkehr diskutiert. Die Erfassung der Nachfrageseite, die Anforderungen der
Logistikbranche an die neue Technologie, ist ein wichtiger Schritt, um die Technik nutzerorientiert zu entwickeln und
die Rahmensetzung entsprechend zu gestalten. Aus der Befragung (Akzeptanzanalyse in AP 2) können folgende
Erkenntnisse als Ausgangslage für realistische Einsatzszenarien von AVF im Straßengüterverkehr zusammengefasst
werden.
Es bestehen ein hoher Bedarf und ein starkes Interesse an AVF in der Logistikbranche. AVF hat das Potential,
eine der entscheidenden Herausforderungen der Branche zu lösen: den dramatischer werdenden
Fahrermangel.
Von den Global Playern der Branche und den eCommerce-Handelskonzernen ist die Pionierleistung zu
erwarten. Zwar zeigen die klein- und mittelständigen Unternehmen ein hohes Interesse an der Technologie,
allerdings lassen es im Allgemeinen die aktuell realisierbaren Gewinnmargen, das unternehmerische
Risikokalkül und die Lernkosten nicht zu, dass diese Unternehmen die Vorreiterstellung einnehmen werden.
Die AVF-Technologie wird voraussichtlich von den Nutzern zunächst zur (Kosten-)Optimierung von
bestehenden Prozessen eingesetzt. Eine Erweiterung der Dienstleistungen oder eine maßgebliche
Umgestaltung der Logistikprozesse ist somit kurz- bis mittelfristig nicht zu erwarten.
Je standardisierter die Logistikprozesse sind, desto wahrscheinlicher ist der Einsatz von AVF. Damit ergibt sich
ein natives Einsatzpotential der Technik in den Logistikteilmärkten, die mit Systemverkehren bedient werden.
Auf der Ersten und Letzten Meile, bei denen die Serviceleistung beim Kunden einen hohen Stellenwert hat und
die im Trend immer wichtiger für die Geschäftsfeldentwicklung der Logistikakteure wird, ist der Einsatz der
AVF-Technologie laut der Interviewergebnisse auszuschließen, da hierbei weiterhin ein Fahrer bzw.
Kundenpersonal benötigt werden würde. Somit wären die Kosten der AVF-Technologie und der Nutzen im
besten Falle pari.
Der realistische und absehbare Einsatzbereich der AVF-Technologie ist der Streckenabschnitt auf der
Autobahn zwischen Depots und Güterverkehrszentren (GVZ) sowie zu Begegnungspunkten.
Die Übernahme von anderen Tätigkeiten durch den Fahrer während der Fahrt ist unrealistisch. Aufgaben, die
bisher durch das Fachpersonal in der Disposition der Logistikunternehmen durchgeführt werden, könnten nur
mit deutlichem Umschulungsaufwand auf den Fahrer übertragen werden. Dem widersprechen aber die
Qualifikationspotentiale des heutigen Fahrpersonals, der Fahrermangel sowie das Wissen und der
Erfahrungsschatz des bestehenden Fachpersonals.
Nutzenerhöhend wären der Einsatz von automatisierten Lang-Lkw sowie die Ermöglichung von
Konvoifahrten. Konvoifahrten im Sinne der Interviews unterscheiden sich allerdings insofern von der
allgemeinen Definition von Konvois, dass nicht Fahrzeuge mit Fahrer im verringerten Abstand zueinander
fahren, sondern dass ein Konvoiführer mehrere Transport-Automaten (als elektronisch gekoppelte Anhänger)
bewegen kann. Somit wären Auftragsspitzen abfangbar und erweiterte Economies of Scale Effekte
realisierbar.
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 5
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3 Aus den vorangehenden Erkenntnissen kann abgeleitet werden, dass ein nutzenstiftender Einsatz fahrerloser Fahrzeuge in der Fahrt auf Bundesautobahnen liegt. Fahrzeuge, bei denen der Fahrer administrative Tätigkeiten während der Fahrt übernimmt, gelten als nicht nutzerorientiert. Weiterhin ist eine hohe Automatisierungsstufe nutzenstiftend, das fahrerlose, autonome Fahrzeug. Damit wird nicht nur die technische Entwicklung, sondern auch die politisch-rechtliche Rahmensetzung gefordert, entsprechende Produkte zu ermöglichen. Ein Langfristszenario zeigte sich bei den befragten Unternehmen nicht. Einerseits kann dies mit dem Druck des kurzfristigen Tagesgeschäfts und der fehlenden Strategie- sowie Forschungs- und Entwicklungs-Einheiten in klein- und mittelständigen Unternehmen erklärt werden. Andererseits ist die geforderte Technik nicht verfügbar, somit nicht testbar und relativ abstrakt für die Akteure im operativen Geschäft. Darüber hinaus haben Innovationsszenarien wie der Lang-Lkw und die Elektromobilität Spuren der Dissonanzen zwischen politischen Entscheidungen, technischer Realisierung und praktischem Einsatz hinterlassen. Somit ist es langfristig möglich, dass neue Dienstleistungen und Einsatzfelder für AVF erschlossen werden. Die Akteure fokussieren jedoch zunächst den betriebswirtschaftlich abbildbaren ersten Innovationsschritt (Integration von AVF in bestehende Logistikketten). Aus den Interviews in AP 2 wurde darüber hinaus deutlich, dass AVF innerhalb der nächsten 10 Jahre als verfügbare robuste Technik von den Akteuren der Logistikkette erwartet wird. Diese Zeitspanne ist mit den Treibern Personalmangel und Kostenstruktur zu erklären, die einen zunehmenden Druck auf die Akteure ausüben, entsprechende technisch-organisatorische Konzepte zur Lösung umzusetzen. Vom aktuellen Jahr 2018 ausgehend ergibt sich ein Analysehorizont mit dem Jahr 2030, der bei den Szenarien zu betrachten ist. Vor diesem Hintergrund wurden zu einem Basisszenario 2030 drei AVF-Szenarien entwickelt. Diese sind im Bild 1 als mögliche Entwicklungspfade von AVF in der Logistikbranche im Zeitablauf strukturiert. Das Integrationsniveau von AVF (und Fahrerassistenzsystemen) in den Fahrablauf nimmt dabei zu. Das Basisszenario beschreibt eine Welt in 2030, bei der technisch das AVF auf öffentlichen Straßen nicht realisiert ist. Die Nachfragestrukturen für den Güterverkehr sind entsprechend der wirtschaftlichen und gesellschaftlichen Entwicklung bis zum Jahr 2030 verändert. Diesem Basisszenario werden drei Szenarien gegenübergestellt, in denen AVF im öffentlichen Straßenraum eingesetzt wird. Die sozioökonomischen Strukturdaten, die Entwicklung der Verkehrsinfrastruktur sowie die allgemeinen verkehrspolitischen Rahmenbedingungen sind in allen Szenarien identisch mit dem Basisszenario. Somit werden die Wirkungen der Szenarien ohne und mit AVF kontrastiert. Das erste Szenario mit AVF „Automated freight transport on highways“ zeigt eine Logistikwelt auf, in der die Fahrzeuge auf Autobahnen autonom und somit fahrerlos fahren. Wege außerhalb von Autobahnen müssen weiterhin mit Fahrer durchgeführt werden. Das zweite Szenario „Automated Interfaces“ kann sich aus dem ersten Szenario oder direkt aus der heutigen Welt heraus entwickeln. Darin ist vorgesehen, dass auch die Strecken von der Autobahn bis zum Depot, dem GVZ etc.) von autonomen Fahrzeugen gefahren werden. Beide Szenarien konnten aus den Interviews abgeleitet werden, in denen die potenziellen Nutzer der AVF-Technik die Erwartungen formuliert haben, damit die Technik nutzenstiftend in Logistikprozessen eingesetzt werden kann. Ein drittes Szenario, „Automated urban freight transport“, verlässt die Analyseperiode und soll eine Automatisierung der „Letzten Meile“ beschreiben. Ein derartiges Szenario wurde zwar von den Interviewten als unwahrscheinlich bewertet, allerdings wäre dieses Szenario ein konsequenter nächster Diffusionsschritt der Automatisierungstechnologie. Somit soll das dritte Szenario die Effizienzpotentiale neuer Tourtypen, neuer Fahrzeugauslastungen und ggf. neuer Fahrzeugtypen durch den Einsatz von AVF im urbanen Güterverkehr aufzeigen. Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 6 Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.doc
ATLaS – Projektbericht zum Arbeitspaket 3
Abbildung 1: Szenarien in der Übersicht
Szenario 3:
Automated urban
freight transport
Integrationsniveau von AVF
Szenario 2:
Automated Interfaces
Szenario 1:
Automated freight
transport on highways
Basisszenario
2020 2030 Zeitachse
1.1. Narrative Beschreibung des Basisszenarios und dessen Parameter
Für das Basisszenario wurden sozioökonomische Strukturdaten, die Entwicklung der Verkehrsinfrastruktur sowie die
verkehrspolitischen Rahmenbedingungen der Verkehrsverflechtungsprognose 2030 [1] für das Prognosejahr 2030 zu
Grunde gelegt. Darüber hinaus ist die Verflechtung der Güterverkehre für das Prognosejahr 2030 zwischen den
Verkehrszellen innerhalb Deutschlands sowie deutscher Verkehrszellen mit dem Ausland für das Basisszenario
übernommen worden. Somit entspricht das Basisszenario vollständig der bestehenden Planungsgrundlage
verkehrspolitischer Entscheidungsträger. Basierend darauf können die Effekte der Automatisierung im
Straßengüterverkehr anhand dieser Planungsgrundlage verdeutlicht werden.
Weitere Details zu den Rahmenbedingungen des Basisszenarios können dem Schlussbericht der
Verkehrsverflechtungsprognose 2030 entnommen werden (siehe [1]). Die wichtigsten Rahmenbedingungen werden
im Folgenden zusammengefasst.
Die Bevölkerung in Deutschland wird bis 2030 gegenüber 2010 um ca. 2 % abnehmen und 78,2 Mio. Einwohner
umfassen. Einwohner von 65 Jahren und mehr werden um 31 % zunehmen und damit etwa einen Anteil von 25 % an
der Gesamtbevölkerung haben. Die Anzahl der Erwerbstätigen bleibt mit 39 Mio. nahezu konstant im Vergleich zu 2010.
Als Leitdaten der gesamtwirtschaftlichen Entwicklung werden folgende Wachstumsraten zwischen 2010 und 2030
angenommen.
Der Welthandel wächst um 4,8 % p.a.
Das Bruttoinlandsprodukt (BIP) nimmt um 1,1 % p.a. zu.
Exporte wachsen um 3,6 % p.a. und Importe um 4 % p.a.
Infrastrukturell werden alle Maßnahmen des 2014 bestehenden Bundesverkehrswegeplans, welche als „vordringlicher
Bedarf“ bewertet wurden, umgesetzt. Damit gibt es eine Steigerung der Gesamtkapazität des Verkehrsnetzes bei allen
Verkehrsträgern.
Die verkehrspolitischen Rahmenbedingungen für den Straßengüterverkehr per Lkw sind in der nachstehenden Tabelle
1 dargestellt. Es zeigt sich, dass zwar Kraftstoffkosten ansteigen, aber gleichzeitig auch die Kraftstoffverbrauchseffizienz
erhöht werden kann. Nach der Verkehrsverflechtungsprognose 2030 steigen die Transportkosten bis 2030 somit nicht
weiter an.
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 7
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3
Tabelle 1. Entwicklung von Preisen in der Basisentwicklung nach der Verkehrsverflechtungsprognose (Quelle: [1], eigene Darstellung)
Reale Veränderung von
Bemerkung
2010 zu 2030 in [%] p.a.
Bei höherem / niedrigerem Rohölpreis
Mineralölsteuersatz Diesel 2,5
stärkerer / schwächerer Anstieg
Kraftstoffpreis 2,0 Auch bei höherem / niedrigerem Rohölpreis
Kostensenkung durch
-1,0 Inkl. Effekt aus Kostendruck ausländischer Lkw
Produktivitätsfortschritte
Lkw-Maut 0,0 Somit gilt der Mautsatz von 2015
Transportkosten insgesamt 0,0 Impliziert weitere umweltpolitische Auflagen
Da bei der Automatisierung des Straßengüterverkehrs auch andere Verkehrsträger betroffen sein können
(beispielsweise aufgrund von Verlagerungseffekten), werden nachstehend die angenommenen Entwicklungen des
Basisszenarios für den Schienengüterverkehr und die Binnenschifffahrt aufgeführt.
Für den Schienengüterverkehr wird entsprechend der Verkehrsverflechtungsprognose angenommen, dass die
Transportpreise für den Einzelwagen- und Ganzzugsverkehr real um 0,5 % p.a. sinken. Dies ist einerseits mit
steigendem Wettbewerbsdruck durch die Marktliberalisierung, freigesetzten Rationalisierungspotentialen, konstanten
Trassenpreisen, andererseits auch mit Kostensteigerungen durch Energiekosten und Lärmminderungen begründet.
Im kombinierten Verkehr (KV) werden die Interoperabilität der Verkehrsträger verbessert und weitere KV-
Terminalstandorte realisiert.
Für die Binnenschifffahrt werden die Transportkosten um 12 % bis 2030 sinken (-0,6 % p.a.). Dahinter liegen die
Annahmen, dass zwar die Personal- und Treibstoffkosten um 9 % ansteigen werden, sich jedoch die durchschnittliche
Tonnage um etwa ein Viertel erhöht.
Die Güterverkehrsnachfrage gemessen im Tonnageaufkommen entwickelt sich sehr differenziert je Gutart und
Verkehrsträger (siehe Tabelle 2). Am deutlichsten wächst das Aufkommen der Gutarten "Gutart unbekannt" (mit 2,6 %
p.a.), "Geräte und Material für Güterbeförderung" sowie "Möbel, etc.“) (jeweils mit 1,6 % p.a.), "Textilien, Bekleidung",
"Sammelgut" (jeweils mit 1,5 % p.a.), "Fahrzeuge", "Maschinen und Ausrüstungen" sowie "Nahrungs- und Futtermittel"
(jeweils mit 1,3 % p.a.). In der Gesamtentwicklung steigert sich das Tonnageaufkommen um knapp 650 Mio. auf
insgesamt 4,3 Mrd. Tonnen in 2030. Dabei nimmt die Güterverkehrsnachfrage bei Lkw mit 24 % am meisten zu. Die
Nachfrage steigert sich bei der Schiene um 17 % und bei Binnenschiff um 20 % bis 2030.
Tabelle 2: Gutartenfeine Aufkommensentwicklung und Steigerungsraten aufgeschlüsselt nach Verkehrsträger in Mio. Tonnen (Quelle: [1], eigene
Darstellung)
Straße Schiene Binnenschifffahrt Gesamtentwicklung
Gütergruppe 2010 2030 2010 2030 2010 2030 2010 2030 in %
Land- und forstwirtschaftliche Erzeugnisse 184,6 232,2 7,6 11,2 15,9 21,4 208,1 264,9 1,2 %
Steinkohle 3,8 0,2 30,4 14,4 32,2 34,4 66,4 49,0 -1,5 %
Braunkohle 3,6 2,9 9,1 4,9 1,5 0,0 14,1 7,8 -2,9 %
Erdöl und Erdgas 1,2 0,9 0,5 0,3 0,8 0,7 2,5 1,9 -1,3 %
Erze 0,8 1,1 20,4 21,2 27,8 36,6 49,0 58,9 0,9 %
Düngemittel 4,1 4,4 1,9 2,2 0,7 0,9 6,7 7,5 0,5 %
Steine und Erden 862,3 893,5 27,3 35,1 31,6 34,4 921,2 962,9 0,2 %
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 8
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3
Nahrungs- und Genuss
341,7 442,1 2,1 4,0 11,5 13,4 355,3 459,6 1,3 %
mittel
Textilien, Bekleidung,
21,1 27,9 0,0 0,5 0,1 0,1 21,1 28,5 1,5 %
Leder
Holzwaren, Papier,
166,4 207,2 9,8 13,5 3,7 5,4 179,9 226,2 1,2 %
Papier, Druckerei
Koks 7,1 0,5 6,5 4,9 2,4 1,5 15,9 6,9 -4,1 %
Mineralölerzeugnisse 90,6 71,6 38,0 39,5 33,5 35,0 162,0 146,2 -0,5 %
Chemische Erzeugnisse
167,5 206,2 29,9 38,5 21,4 26,6 218,8 271,3 1,1 %
etc.
Sonstige Mineralerzeugnisse 322,1 375,6 11,1 13,7 4,6 5,9 337,8 395,3 0,8 %
Metalle und Metallerzeugnisse 174,0 223,8 61,9 74,0 11,6 14,0 247,5 311,9 1,2 %
Maschinen und Ausrüstungen etc. 76,0 97,3 0,8 1,8 0,7 1,0 77,5 100,2 1,3 %
Fahrzeuge 91,4 116,9 9,5 14,5 0,9 0,9 101,8 132,3 1,3 %
Möbel, Schmuck,
20,9 28,0 0,1 0,4 0,2 0,3 21,1 28,7 1,6 %
Musikinstrumente etc.
Sekundärrohstoffe,
254,0 267,8 15,2 18,4 13,3 15,3 282,5 301,5 0,3 %
Abfälle
Post, Pakete 35,2 44,0 0,0 0,0 0,0 0,0 35,2 44,0 1,1 %
Geräte und Material für
87,1 115,6 3,6 7,4 1,8 3,6 92,4 126,6 1,6 %
Güterbeförderung
Umzugsgut, sonstige
39,1 49,7 0,1 0,1 0,0 0,0 39,2 49,8 1,2 %
Güter
Sammelgüter 114,8 154,5 1,8 3,2 0,0 0,1 116,6 157,7 1,5 %
Unbekannte Gutart 46,8 75,2 71,2 119,8 13,9 23,8 131,9 218,8 2,6 %
Summe 3.116,1 3.639,1 358,9 443,7 229,6 275,6 3.704,7 4.358,4 0,8 %
1.2. Die Logistikkette im Basisszenario
Die Logistikbranche ist verkehrsstatistisch nicht erfasst. Somit gibt es keine amtlichen Daten, welche logistische
Prozesse quantifizieren. In der Konsequenz ist die Verbindung zwischen Gutarten aus der Verkehrsstatistik (siehe
Tabelle 2) und logistischer Aktivität nicht ohne zusätzliche Annahmen möglich. Hierzu werden in diesem Projekt die
Publikation „TOP 100 der Logistik“ [1] sowie Modellergebnisse aus dem BPMN 2.0 (siehe Bericht im Arbeitspaket 1
(Systemanalyse)) genutzt.
In der Basisentwicklung wird davon ausgegangen, dass sich die Art der Leistungserstellung und die Nachfrage nach
der Art der logistischen Leistungserstellung grundsätzlich nicht ändern. In einer Umfrage der BVL ergab sich, dass
Stückgutverkehre von den Wirtschaftsbranchen (Elektrotechnik, Lebensmittel, Maschinenbau, Automotive, Chemie
und Pharma sowie Sonstige) am meisten nachgefragt werden. Es folgen Seefracht, Ladungsverkehre, Luftfracht und
KEP-Verkehre in der Relevanz. Weitere Logistikdienstleistungen sind für die Branchen relativ unbedeutend ([2]). Die in
Tabelle 2 angeführten Gutarten werden demnach überwiegend mittels dieser Logistikdienstleistungen (oder im
Selbsteintritt) transportiert. Im Projekt ATLaS werden die Logistikdienstleistungen Seefracht und Luftfracht nicht
berücksichtigt. Der Fokus liegt vornehmlich auf den Logistikketten im Stückgutverkehr, im Ladungsverkehr sowie im
KEP-Markt. Nach der Studie „TOP 100 der Logistik“ [2] sowie dem BPMN 2.0 weist die Transportstruktur dieser drei
Teilmärkte jeweils folgende Charakteristika und Logistikprozessketten auf.
Die Flotte der Logistikunternehmen hat einen festen Standort im Einzugsbereich der Kunden und somit zumeist
mehrere Standorte deutschland- oder europaweit. Alternativ zum Unterhalt mehrerer Standorte werden
Logistiknetzwerke eingesetzt, in denen regionale Speditionen kooperieren und dadurch die zur Leistungserbringung
nötige Flächenabdeckung erreichen. Zu Beginn der Logistikkette gibt zunächst der Versender den Auftrag an einen
Logistikdienstleister und stellt die Ware versandfertig bereit (Etikettierung, Verpackung, Kontrolle etc.). Der
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 9
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3
Logistikdienstleister plant daraufhin die Touren, erstellt den Lieferschein bzw. die Frachtpapiere für die Waren und
erteilt seinerseits den Auftrag an einen Transporteur. Dieser prüft, etikettiert und verzollt die Ware, um sie daraufhin in
ein Güterverkehrszentrum/ Depot (allgemein: Konsolidierungszentrum) zu bringen. Diese regionalen
Konsolidierungszentren befinden sich typischerweise in der Nähe von Autobahnen, so dass diese mit einfachem
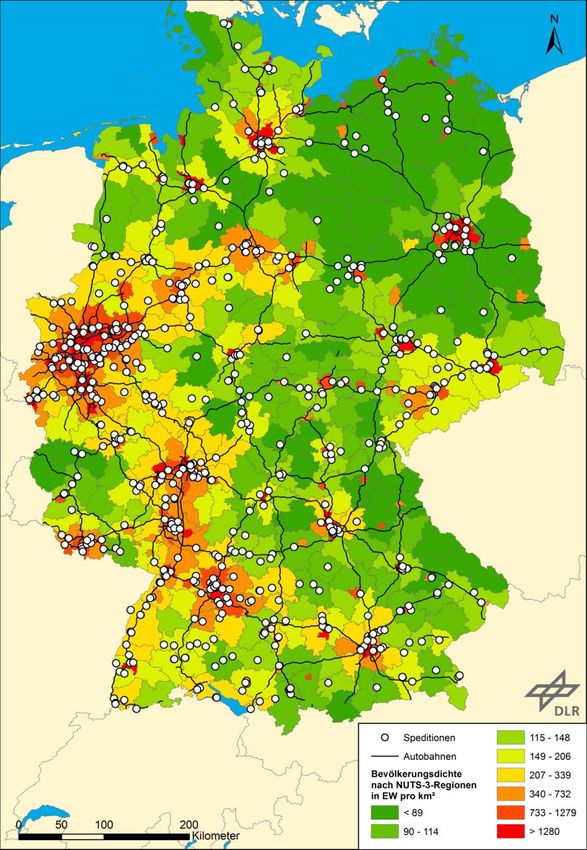
Zugang für den Hauptlauf genutzt werden können. In Abbildung 2 sind die meisten Logistikstandorte in Deutschland
eingetragen. Die Abbildung zeigt die Nähe zur Autobahn und zur Bevölkerung (als Indikator für die Kundenähe). Das
Konsolidierungszentrum dient als Umschlagsort für die Transportwaren, um sie von da aus weiter zu transportieren.
Es findet anschließend entweder ein direkter Transport zum Zieldepot statt oder es werden die Transportwaren in
Zentrallägern oder Crossdocks nochmals umgeschlagen. Auch der Tausch von Wechselbrücken zwischen
Depotstandorten an sogenannten Begegnungspunkten anstatt in Zentrallägern oder Crossdocks ist gängig. Die
Distanzen zwischen Depots, Zentrallagern, Crossdocks, Begegnungspunkten etc. sind in etwa auf die gesetzlich
zulässigen Lenk- und Ruhezeiten von max. 4,5 h je Fahrt, einer anschließenden 45-minütigen Fahrpause (die für Be-
und Entladen oder Ladungstausch genutzt wird) sowie einer maximalen Tagesfahrzeit von 9 h je 24 h ausgelegt. Somit
sind die Fahrer am Ende einer Tour jeweils wieder am Ausgangspunkt der Fahrt. Die Transportkette endet mit einer
Verteilfahrt (wiederum als direkte Fahrt oder im Milkrun-Prinzip), bei der die Waren beim Kunden ausgeliefert werden.
Zu Anfang oder Beginn können durch den Fahrer zusätzlich Servicedienstleistungen beim Kunden erbracht werden.
Folgende Beispiele von Servicedienstleistungen können in diesem Kontext genannt werden.
Zu Beginn einer Transportkette: Verpackung der Ware, Entgegennehmen von Reklamationen
Zum Ende einer Transportkette: Entpackung der Ware, Entsorgung des Verpackungsmaterials, Verräumung
der Ware in Regale
Die drei Teilmärkte Stückgutverkehr, Ladungsverkehr sowie KEP-Markt unterscheiden sich im Wesentlichen in
Gewichtmaßen der Ladeeinheiten sowie der Anteile spezifischer Güter. Zum Beispiel sind im Ladungsverkehr
Ladungsgewichte zwischen 3 und 25 Tonnen bei Metallwaren und Ähnliches und damit Direktverkehre üblich.
Dagegen sind es im Stückgutverkehr Lebensmittel bei Ladungsgewichten zwischen 30 Kg und 2,5 Tonnen, die in der
Transportkette typischerweise nochmals umgeschlagen werden.
Die vereinfachte Struktur der Transportkette der betrachteten Teilmärkte ist in der Abbildung 3 dargestellt. Sie umfasst
Einsammel- und Auslieferungstouren, Umschlagspunkte und Direktverkehre. Der Hauptlauf wird über Autobahnen
abgewickelt. Abbildung 4 zeigt die Logistikkette mit den oben beschriebenen Teilprozessen.
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 10
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3 Abbildung 2: Logistikstandorte nach Bevölkerungsdichte [3] Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 11 Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.doc
ATLaS – Projektbericht zum Arbeitspaket 3
Abbildung 3: Typische Transportstruktur im Basisszenario
Legende
Fahrabschnitt Milkrun Autobahn
Begegnungspunkt
Konsolidierungszentrum
Direkte Abholung/ Autobahnzubringer (Kreis-,
(Lager, Distribution Center,
Auslieferung Land-, Gemeindestraßen)
Cross Dock, GVZ)
Ort des Versenders/ Fahrt im Hauptlauf (Luftlinie)
Endkunden
Abbildung 4: Logistikkette im Basisszenario
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 12
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3
Das Szenario “Automated freight transport on highways”
In der Retrospektive dieses Szenarios haben die großen Unternehmen in der Logistikbranche und des Online-Handels
(Global Player) bereits im Jahr 2017/2018 mit automatisierten Fahrzeugen Erfahrungen gesammelt. Zunächst wurden
diese auf Betriebshöfen und nicht-öffentlichen Bereichen eingesetzt (z.B. automatisierte „Wiesel“ zum
Containerhandling). Auch Konvoifahrten auf Autobahnen, bei denen jedoch immer noch ein Fahrer im Fahrzeug
anwesend war, gehörten zu den ersten Testanwendungen von AVF in der Branche. Technisch robuste und auf die
Kundenanforderungen zugeschnittene Lösungen führten dazu, dass die großen Unternehmen anfingen, das Potential
des AVF gegen den Fahrermangel und den Kostendruck zu erschließen. Allerdings war es ein von
Sicherheitsabwägungen getriebener gesellschaftlicher Diskurs, so dass als erster Einsatzbereich von AVF lediglich der
Betrieb auf Autobahnen erreicht werden konnte. In diesem Szenario werden Im Jahr 2030 die Fahrzeuge auf
Autobahnen vollständig fahrerlos fahren. Sie bewegen sich autark im Verkehrsfluss auch durch Baustellen und
Tunnelanlagen. Das Fahrzeug hat jedoch alle technischen Voraussetzungen, um von einem Fahrer manuell gefahren
zu werden. Dies ist nötig, damit das Fahrzeug in seiner Einsatzbreite nicht eingeschränkt ist. Die Fahrt außerhalb der
Autobahnen zum Depot, Hub oder Lager sowie auf der Ersten und Letzten Meile ist in diesem Szenario nicht fahrerlos
möglich. Das autonome Fahrzeug kann sowohl als Lang-Lkw eingesetzt werden (mit einem mechanisch gekoppelten
Anhänger) als auch als Führungsfahrzeug von einem elektronisch gekoppelten Transportautomaten dienen. Die
Transportautomaten sind auf die Ladungseinheit abgestimmte, selbstgetriebene Anhänger, die einem
Führungsfahrzeug folgen.
2.1. Die Logistikkette im Szenario “Automated freight transport on highways”
Der Transport startet im Warenausgang des Versenders. Dieser hat die Waren bereits verpackt und bereitgestellt, so
dass eine manuelle Verladung durch das Personal des Versenders beziehungsweise den Fahrer erfolgt. Auch
Serviceaufgaben wie beispielsweise die Annahme von Reklamationen werden vom Fahrer durchgeführt. Die erste
Meile des Transports wird vollständig vom Fahrer übernommen, der lediglich durch Fahrerassistenzsysteme
unterstützt wird. Bei der ersten Meile kann es sich entweder um eine Sammeltour oder um einen Direktverkehr vom
Versender zu einem Konsolidierungszentrum (Depot, Cross Dock, Zentral/Regionallager, GVZ etc.) handeln.
Im Konsolidierungszentrum angekommen werden die Waren entsprechend des Transportablaufes im Systemverkehr
verarbeitet. Dazu gehört das Identifizieren und Umschlagen der Ware. Vor dem weiteren Fahrtantritt werden zunächst
der allgemeine technische Zustand des Fahrzeugs und der Ladezustand, sowie die Sicherung der Waren, aber auch
die Auftrags- und Wegedaten vom Lagermitarbeiter geprüft. Der Lagermitarbeiter hat durch Schulungen ein
entsprechend technisches Wissen, um diese Prüfung durchführen zu können. Im Gegensatz zum Basisszenario wird
die Ware jedoch nicht von einem Fahrer vom Konsolidierungszentrum über die Autobahn zum nächsten gebracht,
sondern das Fahrzeug wird zu einer Aufstellfläche überführt. Wie in Abbildung 2 zu erkennen ist, sind regionale
Konsolidierungszentren typischerweise in der Nähe von Autobahnen angesiedelt. Hierbei handelt es sich um eine Tour
von ca. 30 Minuten vom regionalen Konsolidierungszentrum zur Aufstellfläche an der Autobahn.
Von der Aufstellfläche startet der Lkw seine autonome Fahrt auf der Autobahn bis zur Aufstellfläche des
Konsolidierungszentrums am Zielort. Gegebenenfalls findet ein Warenumschlag in einem Konsolidierungszentrum
des Logistiknetzwerkes mittig des Hauptlaufes statt. Für diesen Zwischenhalt endet die automatisierte Fahrt ebenfalls
an einer Aufstellfläche und muss von dort aus zum Konsolidierungszentrum manuell überführt werden. Nach der
Konsolidierung der Waren wird das Fahrzeug erneut zur Aufstellfläche gebracht, damit die weitere autonome Fahrt
stattfinden kann. Durch das Entfallen der Lenkzeiten ist der Prozess des Wechselbrückentausches nicht mehr
ökonomisch sinnvoll und somit entfällt dieser Prozess in Logistikketten.
Während der autonomen Fahrt übermittelt der Lkw Daten an den Logistikdienstleister, woraus dieser Informationen
für seine Kunden generiert (Kühlkette, Lieferzeitpunkt etc.), die Prozessqualität prüft (Fahrgeschwindigkeit,
Abweichungen etc.) und gekoppelte Optimierungsprogramme (Routenoptimierung, Fahreroptimierung etc.) gespeist
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 13
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3
werden. Mittels V2X1-Kommunikation und mobiler Datenübertragung können somit echtzeitgenaue Informationen
gewonnen werden.
An der Aufstellfläche in der Zielregion angekommen übernimmt erneut ein Fahrer das Fahrzeug, entweder für die
direkte Auslieferung (Letzte Meile) oder um das Fahrzeug zum regionalen Konsolidierungspunkt zu überführen und
nach dem weiteren Warenumschlag die Ware an die Kunden in Form einer Verteiltour auszuliefern.
Im Gegensatz zum Basisszenario kann durch die Automatisierung die Einschränkung der Fahrzeit der Fahrer aufgelöst
werden. Bei einer Schicht von acht Stunden ist es damit einem einzelnen Fahrer möglich, im Durchschnitt 6-7
Fahrzeuge (30 Minuten Fahrzeugkontrolle und -übergabe, 30 Minuten Fahrzeit, 10 Minuten Fahrzeugübergabe am
Überführungspunkt) zwischen Autobahn und Konsolidierungszentrum abzufertigen, wofür ohne Automatisierung 6-7
Fahrer ganztags nötig gewesen wären. Die Fahrer bewegen sich damit nur in einem Umkreis von etwa 50 km um das
Konsolidierungszentrum. Damit veränderte sich das Leistungsprofil der Berufsgruppe „Berufskraftfahrer“.
Die Aufstellflächen wurden in beschleunigten Planungsverfahren vom Staat an allen wichtigen Standorten der
Logistikbranche umgesetzt. Da für die Standzeit auf der Aufstellfläche mit der etablierten On-Board-Unit zur
Mauterfassung eine entsprechende Standgebühr erhoben wird, planen die Logistikunternehmen den Einsatz der
Fahrer und der Fahrzeuge anhand von Echtzeit-Daten – gewissermaßen als erweiterte Form des Flottenmanagements.
Die Transportstruktur mit der Automatisierung des Fahrablaufes auf Autobahnen und die Struktur der
Logistikprozesskette sind in den Abbildungen 5 und 6 dargestellt.
Abbildung 5: Skizze der Transportstruktur im Szenario Automated freight transport on highways
Legende
Fahrabschnitt Milkrun Autobahn
Aufstellfläche
Konsolidierungszentrum Autobahnzubringer (Kreis-,
(Lager, Distribution Center, Direkte Abholung/
Land-, Gemeindestraßen)
Cross Dock, GVZ) Auslieferung
Ort des Versenders/
Endkunden Grüne Färbung signalisiert
den Einsatz von AVF
1
Fahrzeug-Fahrzeug Kommunikation und Fahrzeug-Infrastruktur Kommunikation
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 14
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3 Abbildung 6: Logistikkette im Szenario Automated freight transport on highways 2.2. Parametrisierung des Szenarios “Automated freight transport on highways” Durch die mit AVF veränderten Logistikketten haben sich im Jahr 2030 für die Transport- und Logistikbranche folgende Parameter (Marktdaten) im Szenario eingestellt. Mit dem Einsatz von AVF wurde der Bedarf an Fernfahrern reduziert und darüber hinaus auch die Transportkosten verringert. Es konnte allerdings kein vollständiger Ersatz von Fahrern durch AVF realisiert werden, da weiterhin Fahrer für das Störfallmanagement, die Überführung von AVF-Fahrzeugen von der Autobahnen-Aufstellfläche zum Depot sowie für die Letzte Meile benötigt werden. Über die Logistikkette insgesamt konnten die Transportkosten jedoch reduziert werden. Die Pionierunternehmen haben durch den Einsatz von AVF somit anfänglich günstigere Tarife als die Konkurrenz anbieten können – eine deutliche Margenerhöhung bei gleichem Leistungsumfang. Die etablierten Produktionsstrukturen mit einem manuell gefahrenen Fahrzeug ließen dementgegen keine weiteren Kostensenkungen zu, so dass nun in der Branche ein Wettbewerbsdruck zur Umstellung auf autonome Lkw für die Fahrt auf der Bundesautobahn entstand. Diejenigen Unternehmen, die nicht in autonome Lkw investierten bzw. zögerten, waren den Marktkräften ausgesetzt: sie wurden zur Abdeckung regionaler Märkte teilweise aufgekauft oder sie haben Konkurs anmelden müssen. Wenige konnten in sich ergebende Marktnischen ausweichen. Marktnischen waren jeweils dort gegeben, wo nicht-standardisierte Leistungsanforderungen gegeben sind, wie bei Spezialtransporten, Fahrzeugüberführungsservices oder Kundenservices auf der Letzten Meile. Die Transport- und Logistikbranche integrierte bei Systemverkehren die AVF-Technik in ihre Produktionsstrukturen innerhalb von ca. 5 Jahren. Somit fahren 80 % der Lkw im Jahr 2030 auf den Autobahnen autonom. Diese allgemeine technische Umstellung hatte allerdings auch den Nebeneffekt, dass sich die Branche in einem neuen Preiswettbewerb befand. Die anfänglich erhöhte Marge durch den Einsatz von autonomen Lkw konnte gegenüber dem Kunden nicht lange gehalten werden. Im Jahr 2030 wird für den standardisierten Systemverkehr in Folge des Preiswettbewerbes auf dem Niveau der Grenzkosten operiert, mit Gewinnmargen von 1-2 %. Das Preisniveau ist jedoch durch den Wegfall der Fahrerkosten insgesamt gesunken. Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 15 Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.doc
ATLaS – Projektbericht zum Arbeitspaket 3
Das Szenario „Automated Interfaces“
In der Retrospektive dieses Szenarios war der generelle markttechnische Verlauf der Durchsetzung von AVF sehr
ähnlich zum ersten Szenario. Auch hier haben die großen Unternehmen in der Logistikbranche und des Online-
Handels (Global Player) bereits im Jahr 2017/2018 mit automatisierten Fahrzeugen Erfahrungen gesammelt. Im
Zeitverlauf wurden technisch robuste und auf die Kundenanforderungen zugeschnittene Lösungen dazu genutzt, das
Potential der AVF gegen den Fahrermangel und den Kostendruck zu erschließen. Dabei stand im Unterschied zum
ersten Szenario aber im Fokus, dass die Logistikkette deutlich effizienter werden muss. Im Jahr 2030 werden daher in
diesem zweiten Szenario die Fahrzeuge vollständig fahrerlos auf Autobahnen, Kreis-, Land- und
Gemeindestraßenabschnitten im nicht-urbanen Raum fahren können. Damit ist technisch realisiert worden, dass die
Fahrzeuge nicht mehr zwischen Aufstellflächen an den Autobahnen und einem Konsolidierungszentrum von einem
Fahrer manuell überführt werden müssen (wie im Szenario „Automated freight transport on highways“). Im Gegensatz
dazu können die fahrerlosen Fahrzeuge den Weg von Konsolidierungszentrum zu Konsolidierungszentrum autonom
zurücklegen. Das Fahrzeug hat jedoch weiterhin alle technischen Voraussetzungen, um von einem Fahrer manuell
gefahren zu werden. Dies dient vor allem als Konzept der Versorgungssicherheit, damit Fahrzeuge bei technischen
Ausfällen oder ungewöhnlichen Ereignissen immer noch bedient werden können. Weiterhin ist das automatisierte
Fahrzeug als Lang-Lkw einsetzbar und es kann als Führungsfahrzeug für die oben beschriebenen elektronisch
gekoppelten Transportautomaten dienen. Somit wird in diesem Szenario lediglich noch die Erste und Letzte Meile
manuell gefahren.
3.1. Die Logistikkette im Szenario „Automated Interfaces“
Wie in den vorhergehenden Szenarien startet die Logistikkette beim Versender der Ware. Der Versender, der
Logistikdienstleister und das Transportunternehmen sind in diesem Szenario mit Software vernetzt. Versandaufträge
und alle nötigen Dokumente, wie z.B. Lieferscheine oder Frachtpapiere, werden vom System generiert und an den
Logistikdienstleister übertragen. Gleichzeitig werden die Waren verschiedener Versender automatisiert zu einem
Versandauftrag zusammengefügt. Der Versender bekommt im Rücklauf vom System entsprechende RFID-Etiketten
zum Ausdrucken bereitgestellt, so dass die Waren palettiert, etikettiert und zur Verladung an den Rampen aufgestellt
werden können.
Mit der Vernetzungssoftware wird ebenfalls eine optimierte Tourenplanung und -zusammenstellung berechnet und
ein Transporteur beauftragt bzw. ein autonomer Lkw der Tour zugeordnet. Alle für den Transport nötigen
Informationen werden an die On-Board-Unit des zuständigen Lkw gesendet, sodass keine physischen Dokumente
mehr vorhanden sind.
Beim Versender wird ein bereitgestellter Lkw beladen und die vorbereiteten Waren im Fahrzeug gesichert. Weiterhin
ist der Fahrer für Reklamationen und Serviceleistungen zuständig. Das Fahrzeug wird zum regionalen
Konsolidierungszentrum gefahren und an eine vom System signalisierten Rampe gestellt. Hier entlädt der Fahrer das
Fahrzeug. Dabei werden die Waren nun in ein vollautomatisiertes Konsolidierungszentrum eingespeist. Die
Vollständigkeits- und Endkontrolle wird mithilfe einer Scannerschranke durchgeführt, die die RFID-Chips auf den
Waren identifiziert und gleichzeitig die Waren auf oberflächliche Beschädigungen überprüft. Die
Automatisierungssysteme, wie Verpackungs- und Etikettier-Roboter, bereiten die Ware anschließend versandfertig vor
(Etikettierung, Kontrolle und Verpackung). Sind alle Waren für den Versand vom Konsolidierungszentrum in der
Startregion zum Konsolidierungszentrum in der Zielregion vorbereitet, können sie in einen autonomen Lkw an der
Rampe verladen werden.
Ein entsprechender fahrerloser Lkw dockt an die Rampe an und die Waren werden automatisch auf den Lkw verladen
und gesichert. Somit wird der gesamte Warenausgangsprozess ohne menschliche Unterstützung durchgeführt.
Lediglich für Überwachungsaufgaben und zum Eingriff bei technischen Problemen steht entsprechend ausgebildetes
Lagerpersonal zur Verfügung.
Der bereitgestellte Lkw ist ein fahrerloses Fahrzeug, das ohne Fahrer entweder direkt zum Zieldepot oder mit
Zwischenstopp für den Warenumschlag zu einem überregionalen Konsolidierungszentrum mittig des Hauptlaufes
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 16
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3
fährt (für ggf. weitere Konsolidierungen oder Cross-Docks). Der Autopilot führt den Wagen direkt ab dem Start-Depot
bis zum Ziel-Depot, wo das Fahrzeug wieder selbstständig an der Rampe andockt.
Im zweiten regionalen Konsolidierungszentrum wird die Ware erneut automatisch entladen und in das
vollautomatisierte Konsolidierungszentrum eingespeist. Entsprechende Scannersysteme prüfen dabei die
Vollständigkeit und den Zustand der Waren.
Die Informationen über Zustand der Waren, Status im Prozessschritt etc. werden sowohl dem Empfänger als auch dem
Versender in Echtzeit zur Verfügung gestellt. Als neue Servicedienstleistung kann z.B. der Empfänger Lieferzeiten
bestimmen und umdisponieren. Dementsprechend stellt das vollautomatisierte Konsolidierungszentrum Waren an
Rampen zur Auslieferung vom Konsolidierungszentrum zum Empfänger bereit und informiert entsprechende Lkw und
Fahrer. Die Fahrzeuge sind technisch so ausgestattet, dass sie an der Rampe des Konsolidierungszentrums
automatisch verladen und gesichert, auf dem Betriebshof des Versenders oder des Empfängers aber manuell vom
Fahrer beladen bzw. entladen werden. Die Erste und Letzte Meile (vom Versender zum Konsolidierungszentrum bzw.
vom Konsolidierungszentrum zum Empfänger) erfolgt durch einen Fahrer. Ggf. erbringt dieser auch Zusatzleistungen
beim Kunden.
Das Personal beim Empfänger prüft die Waren, Lieferkettendokumente etc. mit Unterstützung des vernetzten
Software-Systems und schließt mit entsprechenden Bestätigungen die Logistikdienstleistung im System ab.
Die Transportstruktur mit der Automatisierung des Fahrablaufes zwischen den regionalen Konsolidierungszentren
und die entsprechende Struktur der Logistikprozesskette sind in den Abbildungen 7 und 8 dargestellt.
Abbildung 7: Skizze der Transportstruktur im Szenario Automated Interfaces
Legende
Konsolidierungszentrum Fahrabschnitt Milkrun Fahrabschnitt des
(Lager, Distribution Center, automatischen Lkw
Cross Dock, GVZ)
Ort des Versenders/ Direkte Abholung/
Endkunden Auslieferung
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 17
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3 Abbildung 8: Logistikkette im Szenario Automated Interfaces 3.2. Parametrisierung des Szenarios „Automated Interfaces“ In diesem Szenario finden die Fahrten zwischen den Konsolidierungszentren vollautomatisiert statt und auch die Konsolidierungszentren sind vollautomatisch. Somit konnte der Personalbestand an Fahrern und Lagerarbeitern deutlich reduziert werden. Diese werden nur noch im Störfallmanagement benötigt. Dadurch sind die Transportkosten in der Logistikkette gegenüber dem Basisszenario stark gesunken. Dieser Effizienzgewinn in den Produktionsstrukturen der Transport- und Logistikbranche führte dazu, dass sehr schnell, innerhalb von ca. 5 Jahren bis 2030, fast ausschließlich autonome Fahrzeuge den Gütertransport in Systemverkehren durchführen (98 %). Dieser Effizienzgewinn in den Produktionsstrukturen wurde zunächst von Pionierunternehmen teilweise an die Kunden weitergegeben. Die Tarife sanken, was die Logistikkosten auch für die Versender spürbar senkte. In der Folge stellte sich ein Konsolidierungsprozess in der Logistikbranche ein, denn nicht alle Unternehmen konnten oder wollten auf die Automatisierung des Fahrablaufes sowie die Automatisierung der Konsolidierungszentren umstellen. Sie waren in der Digitalisierung noch nicht soweit vorbereitet, so dass automatisierte Fahrzeuge und Logistikprozesse integriert werden hätten können. Das größte Hindernis war die Finanzierung der Innovation „Automatisierung des Fahrablaufes und der Konsolidierungszentren“. Es mussten nicht nur automatisierte Fahrzeuge angeschafft, sondern auch die Rampen an den Depots ausgestattet, eine umfassende Investition in IT getätigt und in die Vollautomatisierung der intralogistischen Prozesse investiert werden. Weiterhin waren Schulungen des Personals für neue Aufgaben in der technischen Umgebung nötig. Bei den bestehenden geringen Margen von 1-2 % waren Kredite für die Umstellung auf digitalisierte und automatisierte Logistikprozesse im Zuge der Branchenkonsolidierung nicht selbstverständlich. In der Folge waren diese Unternehmen nicht konkurrenzfähig und wurden entweder zur regionalen Abdeckung aufgekauft oder mussten in vielen Fällen Konkurs anmelden. Wenige konnten sich in die Bedienung von Marktnischen – nicht- standardisierte Transporte – retten. Nachdem sich die Branche auf die Global Player und wenige Mittelständler konsolidiert hat, stellte sich ein neuer Preiswettbewerb um die Kunden ein. Dies lag an den nahezu identischen Dienstleistungen der Anbieter. Somit konnte im Zuge des Preiswettbewerbes die anfängliche Gewinnmarge nicht gehalten, sondern musste weitestgehend an den Kunden weitergegeben werden. Die Produktionskosten waren mit Gewinnmargen von 1-2 % wieder auf dem Niveau der Grenzkosten. Allerdings sind die Logistikkosten für die Versender deutlich gesunken. Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 18 Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.doc
ATLaS – Projektbericht zum Arbeitspaket 3
Das Szenario “Automated urban freight transport”
Das Szenario „Automated urban freight transport“ konzentriert sich auf die sogenannte „Letzte Meile“, die
Feinverteilung von Waren in Städten. Dazu werden zwei Teilmärkte betrachtet: der Lebensmitteleinzelhandel (LEH)
und die Paketzustellung (KEP). Der Hauptlauf zwischen Konsolidierungszentren wird durch die Fokussierung auf die
Letzte Meile in diesem Szenario nicht weiter betrachtet. Es ist davon auszugehen, dass er ähnlich wie im zuvor
beschriebenen Szenario „Automated Interfaces“ autonom durchgeführt wird.
Die Feinverteilung erfolgt in Touren von den Konsolidierungszentren zu den Endkunden im Milkrun-Prinzip oder als
Direktfahrt. Die Bedingungen der Feinverteilung unterscheiden sich allerdings im LEH und KEP, so dass nachstehend
die Szenarien, Logistikketten und Parameter getrennt für die beiden Teilmärkte aufgeführt werden. Weiterhin wird
dieses Szenario nicht mehr in einem bestimmten Zeithorizont betrachtet, zum Beispiel das Jahr 2030 wie bei den
vorangegangenen Szenarien, sondern in unbestimmter Zukunft. Der Grund dafür ist, dass zeitlich noch nicht absehbar
ist, wann die Automatisierung in Städten realisiert werden kann. Im Gegensatz zum Einsatz von AVF auf z.B.
Autobahnen ist die technisch-organisatorische Anforderung viel höher. Obwohl niedrigere Geschwindigkeiten als auf
der Autobahn gefahren werden, führen die höhere Verkehrsdichte, die Vielzahl von Fahrsituation und die Interaktion
vieler Verkehrsteilnehmer zu einer Erhöhung der Komplexität des autonomen Fahrens im städtischen Raum [4]. Die
Transportstruktur der Letzten Meile mittels autonomer Fahrzeuge ist für beide Unterszenarien (LWH und KEP) in
Abbildung 9 dargestellt.
Abbildung 9: Skizze der Transportstruktur in den Szenarien zu Automated urban freight transport
Legende
Lager, Distribution Center, Fahrabschnitt Milkrun Autobahn
Cross Dock, GVZ
Ort des Versenders/ Direkte Abholung/ Autobahnzubringer (Kreis-,
Endkunden Auslieferung Land-, Gemeindestraßen)
Grüne Färbung signalisiert Einsatz von AVF
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 19
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docATLaS – Projektbericht zum Arbeitspaket 3 4.1. Das Szenario “Automated urban freight transport” für den Lebensmitteleinzelhandel In der Retrospektive dieses Szenarios stieg der Druck auf die Belieferung der Filialen des Lebensmitteleinzelhandels durch gestaute Straßen, Fahrermangel, steigende Kosten und enge Zeitfenster zur Zustellung enorm. Die Unternehmen, die die Filialen entweder im Werkverkehr oder durch Logistikunternehmen belieferten, begannen vor diesem Hintergrund erste Tests mit fahrerlosen Fahrzeugen. Diese wurden eingesetzt, um vom Konsolidierungszentrum außerhalb der Stadt Touren zu den Filialen in der Stadt zu fahren. Als beste Lösung gegen den Handlungsdruck zeigte sich der Einsatz fahrerloser Fahrzeuge in der Nachtzeit zwischen 22-6 Uhr. Damit kein Personal vor Ort in den Filialen sein musste, wurden die Rampen entsprechend ausgestattet, so dass das Fahrzeug autonom andocken und entladen konnte. Die entladene Ware konnte vom Verkaufspersonal tagsüber in das Lager oder den Verkaufsraum verräumt werden. Mit dieser Strategie der Nachtbelieferung wurden die im Jahr 2018 typischen Wartezeiten an der Rampe auf ein Minimum reduziert. Darüber hinaus ließen leere Straßen in der Nachtzeit eine bessere, zeitgenaue Tourenplanung zu. In diesem Zuge konnte ein fahrerloses Fahrzeug mehr Filialen in der Zeit zwischen 22-6 Uhr beliefern. 4.1.1. Die Logistikkette im Szenario “Automated urban freight transport” für den Lebensmitteleinzelhandel Das Distributionszentrum oder Zentrallager der Waren bildet den Ausgangs- und Endpunkt der Fahrzeuge in der Logistikkette des Lebensmitteleinzelhandels. Der Lebensmitteleinzelhandel sendet eine Warenbestellung an das System des Zentrallagers. Bei Verfügbarkeit der Waren wird der Auftrag freigegeben. Eine Warenbestellliste wird automatisch erstellt und an das Kommissioniersystem des Lagers übermittelt. Gleichzeitig wird die Abholung der Waren durch ein Transportunternehmen veranlasst. Im Lager werden die Waren auf Rollcontainern und Europoolpaletten (EPAL) bereitgestellt. Diese werden anschließend über ein Förderband auf ein Expresslager befördert. Das Expresslager ist ein Lagersystem, das aus mehreren nebeneinander- und übereinanderliegenden Flächen besteht. Die einzelnen Flächen haben jeweils die Grundfläche eines Lkw-Aufliegers. Über eine spezielle Vorrichtung werden die Flächen mit der bereitgestellten Ware direkt auf den Auflieger geschoben. Dadurch ist kein Eingreifen eines Lkw-Fahrers oder Lagermitarbeiters mehr erforderlich. Die automatisierte Verladung schafft eine Zeitersparnis von etwa 30 Minuten im Gegensatz zur herkömmlichen manuellen Beladung durch den Lkw-Fahrer oder Lagermitarbeiter. Nachdem ein Lkw am Zentrallager bereitgestellt wurde, wird dieser durch das Expresslager beladen. Der fahrerlose Lkw transportiert die Ware zu den Lebensmitteleinzelhandelsfilialen. An der Filiale dockt der Lkw automatisch an der Rampe an. Die Rollcontainer oder EPAL werden durch Förderbänder im Lkw und Wareneingang automatisch entladen. Die Waren laufen anschließend durch eine spezielle Scannerschranke, die die Waren identifiziert und automatisch im Wareneingangssystem bucht. Gleichzeitig erhält das System des Zentrallagers eine Benachrichtigung über das Eintreffen der Waren. Etwaige Leercontainer können auf die gleiche Weise auf den Lkw geladen werden. Diese werden ebenfalls in der Scannerschranke gebucht und die Daten an das System im Zentrallager übermittelt. Der Lkw setzt anschließend seine Tour fort oder fährt zum Zentrallager zurück. Als mögliche Servicedienstleistung der Logistiker kann Servicepersonal die Waren in die Regale verräumen. Anderenfalls würden die Waren vom Verkaufspersonal während des Tagesgeschäftes in die Regale gebracht werden (siehe Abbildung 10). Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 20 Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.doc
ATLaS – Projektbericht zum Arbeitspaket 3
Abbildung 10: Logistikkette im Szenario Automated urban freight transport - Lebensmitteleinzehlhandel
Letzte Meile
prozesse
Transport Wareneingang
Haupt-
Warenausgang
... Autonomes Lebensmittel-
Zentrallager
Fahrzeug einzelhandel
Ware auf Ware fahrerlos Ware mittels
Rollcontainern transportieren, Scanner-
und EPAL Ware per schranke
bereitstellen, Förderband prüfen,
Container und entladen. Wareneingang
Teilprozesse
EPAL auf automatisch
Expresslager buchen,
per Ware durch
Förderband Verkaufs-
bereitstellen, personal
Expresslager einräumen.
auf Lkw
befördern.
4.1.2. Parametrisierung des Szenarios “Automated urban freight transport” für den Lebensmitteleinzelhandel
Die Belieferung der Filialen findet fahrerlos statt, wodurch Fahrerkosten entfallen, die etwa 30 % der
Belieferungskosten ausmachen. Zudem sind größere Fahrzeuge in der Lage, mehr Filialen im Zeitfenster von 22-6 Uhr
zu beliefern als es tagsüber im Jahr 2018 der Fall gewesen war. Somit hängt es von der Optimierung der einzelnen
Unternehmen ab, welche Fahrzeuggrößen in Touren eingesetzt werden. Im Folgenden werden die
Rahmenbedingungen zur Optimierung der Touren genannt.
Alle Fahrzeuge starten und enden beim Distributionszentrum/Zentrallager.
Die Belieferungsmengen an die Filialen sind im Voraus bekannt. Ad hoc Änderungen sind ausgeschlossen.
Die Auslieferzeiten der Belieferungen sind nicht mehr durch spezifische Zeitfenster beschränkt, müssen aber
im Zeitraum von 22-6 Uhr erfolgen.
Der Fuhrpark jedes Logistikunternehmens oder der Fuhrpark im Werkverkehr wird nach Fahrzeugtypen und
Fahrzeuganzahl anhand der zu bewältigenden Transportmenge (Gewicht, Volumen) optimiert. Die
Fahrzeugtypen unterscheiden sich hinsichtlich Kapazität und Kosten.
Jedem Fahrzeug kann höchstens eine Route pro Nachtschicht zugewiesen werden.
Was als Ergebnis der Optimierung der einzelnen Unternehmen als Nachtverkehr resultiert, muss in der
Wirkungsanalyse des Szenarios ermittelt werden.
Titel: ATLaS Datum: 04.12.2018 Geprüft von: Name Seite: 21
Version: 1.0 Erstellt von : Name Freigabe von: Name Dateipfad: ABC-DEFG-HIJ.docSie können auch lesen