MATLAB in der Industrie - VOLAS
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

VOLAS
MATLAB in der Industrie
RWTH Aachen MATLAB Day 2019
Roland Priem, VOLAS GmbH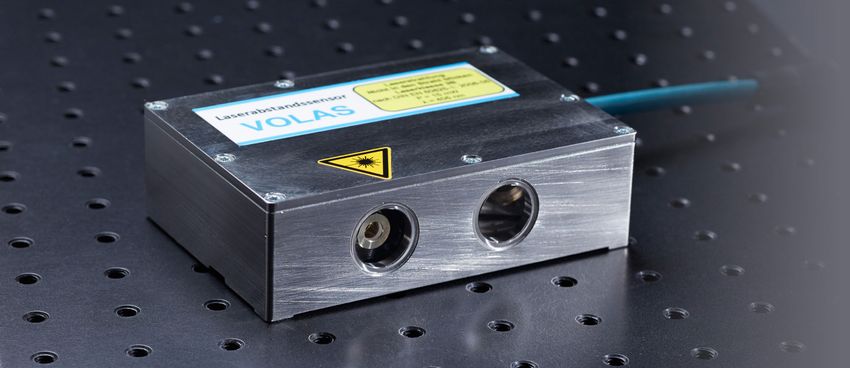
Inhalt VOLAS
• Kurze Vorstellung der VOLAS
• Beispiele für den Einsatz von MATLAB
– Auswertung von Messdaten
– In-House Apps
– Simulink
17.04.19; © VOLAS GmbH 2
VOLAS
VOLAS GmbH
17.04.19; © VOLAS GmbH 3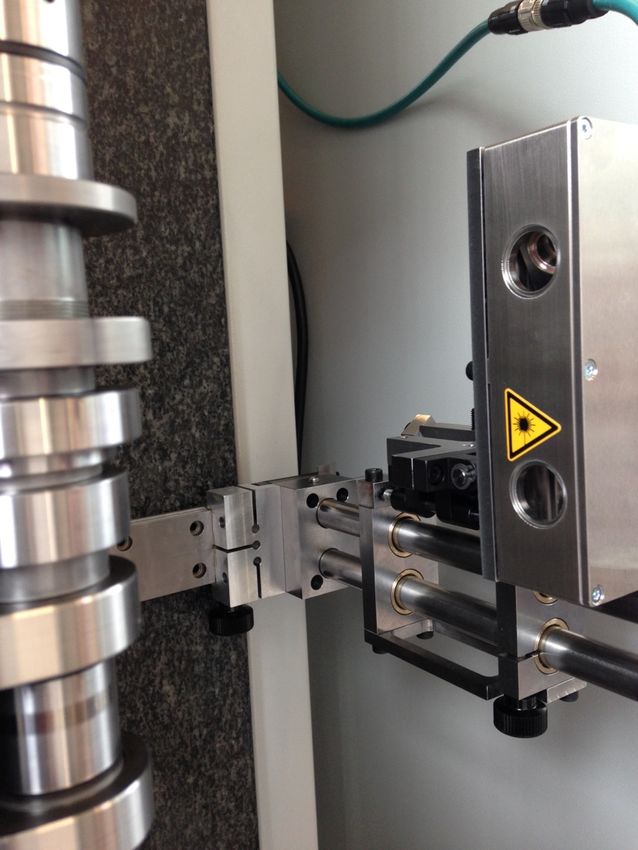
VOLAS GmbH VOLAS
• Gegründet 2014
• 4 Mitarbeiter
• Sitz in Aachen
• Entwicklung und Pro-
duktion von Sensoren und
Geräten zur Geometrie-
prüfung mit optischen
Messverfahren
Friedrich Vollmer Feinmessgerätebau GmbH (die „große Schwester“)
• Gegründet 1963
• ca. 100 Mitarbeiter
• Sitz in Hagen
• Messgeräte für Dicke und
Planheit von (Metall-)band
• Walzwerksregelungen
• ...
17.04.19; © VOLAS GmbH 4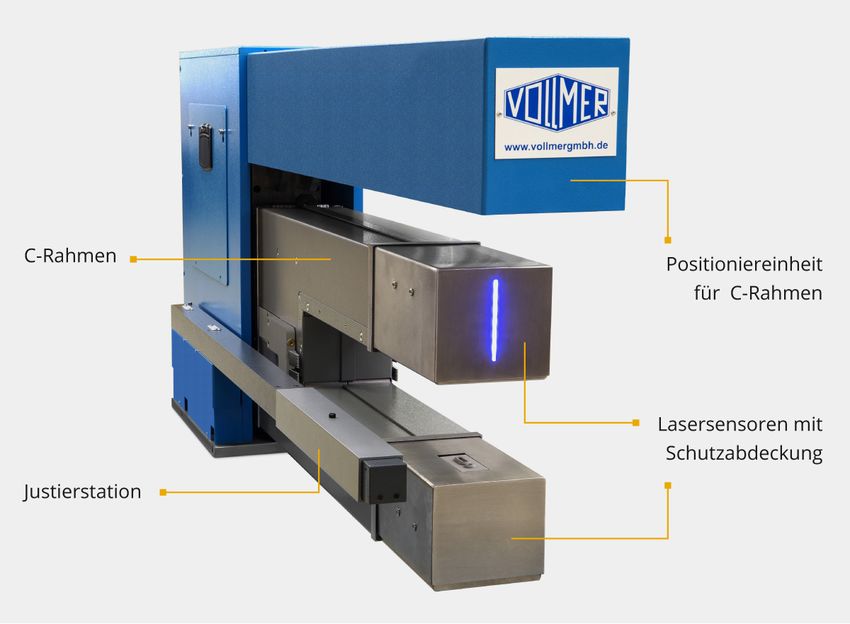
VOLAS GmbH VOLAS
• OEM-Lieferant für Entwicklungskompetenzen:
hochspezialisierte
kundenspezifische • 3D-Konstruktion
Messsysteme • Auslegung optischer
• Entwicklung in enger Komponenten
Zusammenarbeit mit dem
OEM-Kunden • Elektronikentwicklung
• Eigene Fertigung • FPGA-Programmierung
(Endmontage, Kalibrierung • Embedded Software
und Qualifizierung)
17.04.19; © VOLAS GmbH 5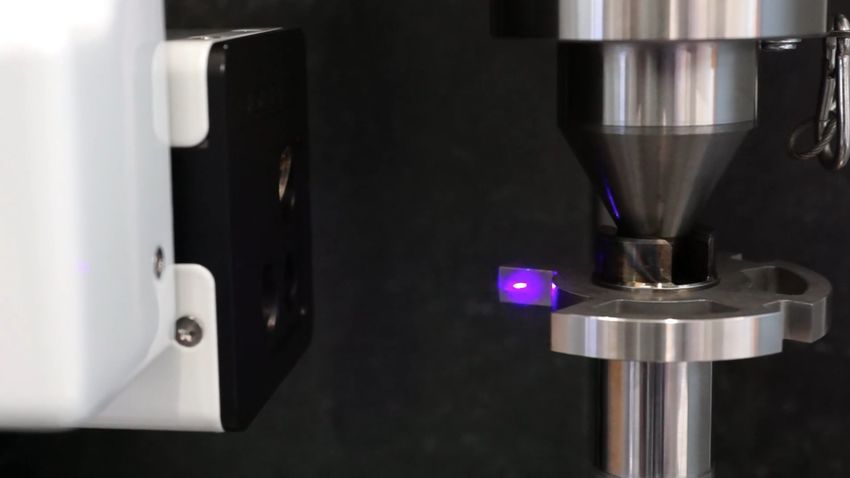
Abstandsmessung mit Lasertriangulation VOLAS
• Fokussierter Laserstrahl
trifft auf Oberfläche des
Messobjekts.
Laserstrahl • Streulicht wird unter einem
festen Winkel beobachtet
und auf einen Detektor
Detektor
abgebildet.
(Zeilenkamera)
• Ändert sich der Abstand
des Objekts in Richtung
des Laserstrahls, ändert
Abbildungsoptik sich die auch die Lage des
Lichtflecks auf dem
Gestreutes Licht Detektor.
• Mittels einer einmalig
ermittelten Kalibrierkurve
wird die Lage des
Objekt Lichtflecks in einen
Abstandswert
umgerechnet.
17.04.19; © VOLAS GmbH 6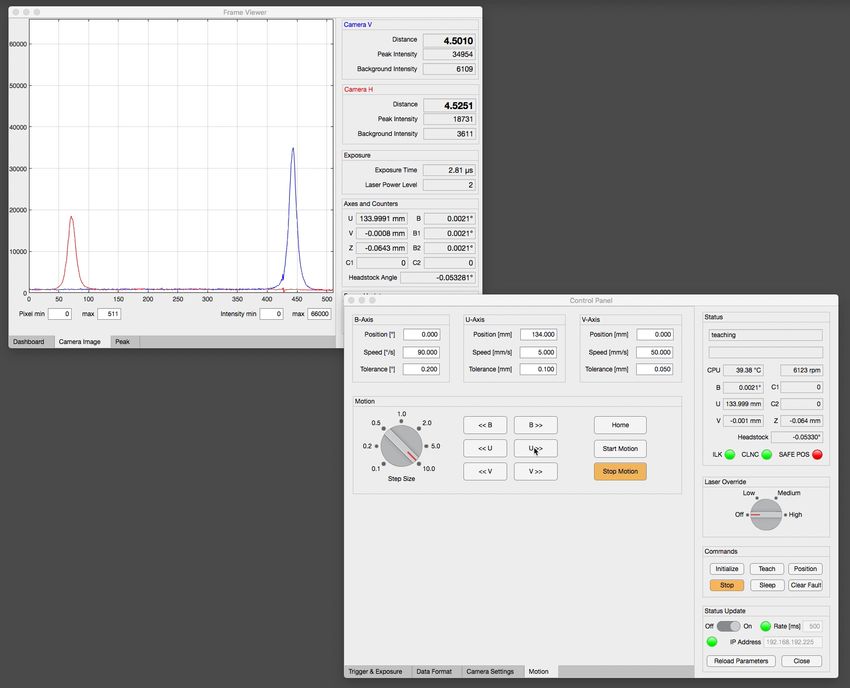
Typische Leistungsmerkmale VOLAS
Merkmal Spezifikation
Messbereiche 4 bis 60 mm
Messfrequenz bis 80 kHz
Laserklasse 3B (20 mW)
Linearität 0.0075% vom Messbereich
(z. B. 0.9 µm bei 12 mm)
Temperaturstabilität 0.001% vom MB pro K
17.04.19; © VOLAS GmbH 7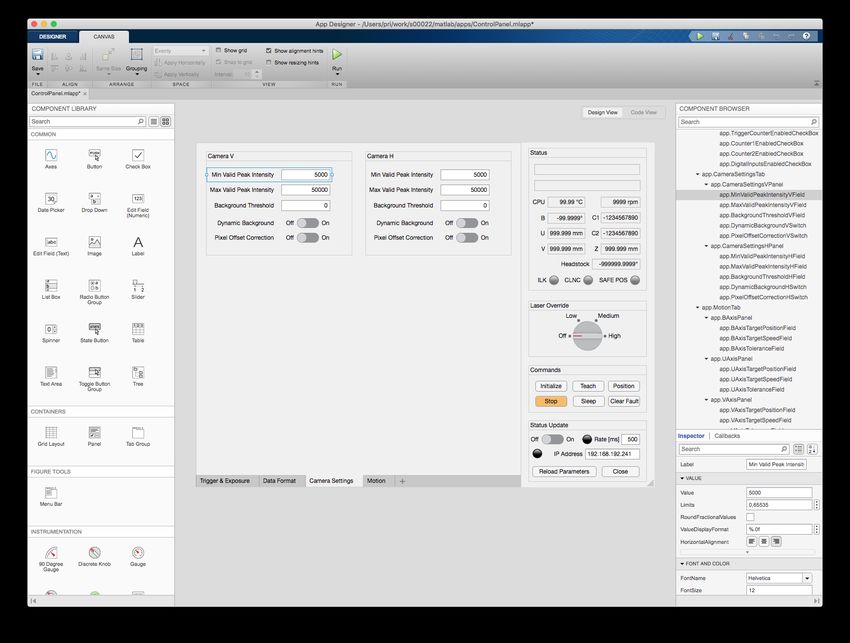
Dickenmessung von Metallbändern VOLAS
Dicke
d = aL-(a1+a2)
Typische Mess-
unsicherheit
± 1-2 µm
17.04.19; © VOLAS GmbH 8
Im Walzwerk VOLAS 17.04.19; © VOLAS GmbH 9
Wellenmessung „LightSCOPE“ VOLAS
• Erweitert eine etablierte Familie von taktilen
Messmaschinen um eine optische Komponente.
• Zwei translatorische Achsen und eine Schwenkachse
erlauben optimale Anpassung an Bauteilgeometrie.
• Zwei orthogonale Beobachtungsrichtungen zur
Minimierung von Abschattungen.
Quelle: www.adcole.com
• Integration in Anlagensoftware über TCP/IP API.
17.04.19; © VOLAS GmbH 10Wellenmessung „LightSCOPE“ VOLAS 17.04.19; © VOLAS GmbH 11
VOLAS
MATLAB bei der VOLAS
17.04.19; © VOLAS GmbH 12VOLAS
Auswertung von Messdaten
17.04.19; © VOLAS GmbH 13Machbarkeitsstudie LightSCOPE VOLAS
Aufgabe • Messungen an einer Nockenwelle mit einem
Standardsensor in einer provisorischen
Messanordnung.
• Bestimmung typischer in der späteren Anwendung
geforderter Kenngrößen der Welle (z.B. Abstände
oder Winkel).
• Abschätzung der Streuung dieser Größen mittels
Messreihen.
Ziel • Nachweis, dass die für eine Bauteiltoleranz T
erforderliche Reproduzierbarkeit erreicht wird.
17.04.19; © VOLAS GmbH 14Messanordnung VOLAS
Laserstrahl
Verschiebung
17.04.19; © VOLAS GmbH 15Sensorrad VOLAS
1. Messung
Sensor verschieben
2. Messung
17.04.19; © VOLAS GmbH 16Rohdaten in Sensorkoordinaten VOLAS
4 4
3 3
2 2
1 1
Sensor Distance Reading [mm]
Sensor Distance Reading [mm]
0 0
-1 -1
-2 -2
-3 -3
-4 -4
-5 -5
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5 0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5
Sample 10 4 Sample 10 4
90
90
120 60
120 60
20
20
150 30
150 30
10
10
180 0 0
180 0 0
210 330
210 330
240 300
240 300
270
270
17.04.19; © VOLAS GmbH 17Transformation in Maschinenkoordinaten VOLAS
90
120 60
20
150 30
10
180 0 0
210 330
240 300
270
17.04.19; © VOLAS GmbH 18Flankenerkennung und Winkelbestimmung VOLAS
90
120 60
20
150 30
10
180 0 0
210 330
240 300
270
17.04.19; © VOLAS GmbH 19Messreihe für einen Relativwinkel VOLAS
Timing Wheel - relative edge angle (7)
75.05
mean = 74.9830 °
= 0.0014 °
range = 0.0048 °
75.04
75.03
75.02
relative edge angle (7) [°]
75.01
75
74.99
74.98
74.97
74.96
74.95
0 2 4 6 8 10 12 14 16
number of measurement
17.04.19; © VOLAS GmbH 20Warum MATLAB? VOLAS
• Leicht zugängliche Syntax erlaubt Konzentration auf den Algorithmus
• Komplexere Methoden zur Softwareentwicklung (z. B. Objektorientierung,
Unit Tests) bei Bedarf verfügbar
• Schnell auch bei großen Datenmengen
• Vielfältige Möglichkeiten zur graphischen Darstellung
• Viele Standardalgorithmen bereits eingebaut oder in Toolbox verfügbar
• Teilausführung von Skripten
• Sehr mächtiger Debugger
• Umfangreiche Dokumentation mit gleichbleibend hoher Qualität
17.04.19; © VOLAS GmbH 21VOLAS
In-House Tools
17.04.19; © VOLAS GmbH 22App Designer VOLAS 17.04.19; © VOLAS GmbH 23
Parametrierung VOLAS 17.04.19; © VOLAS GmbH 24
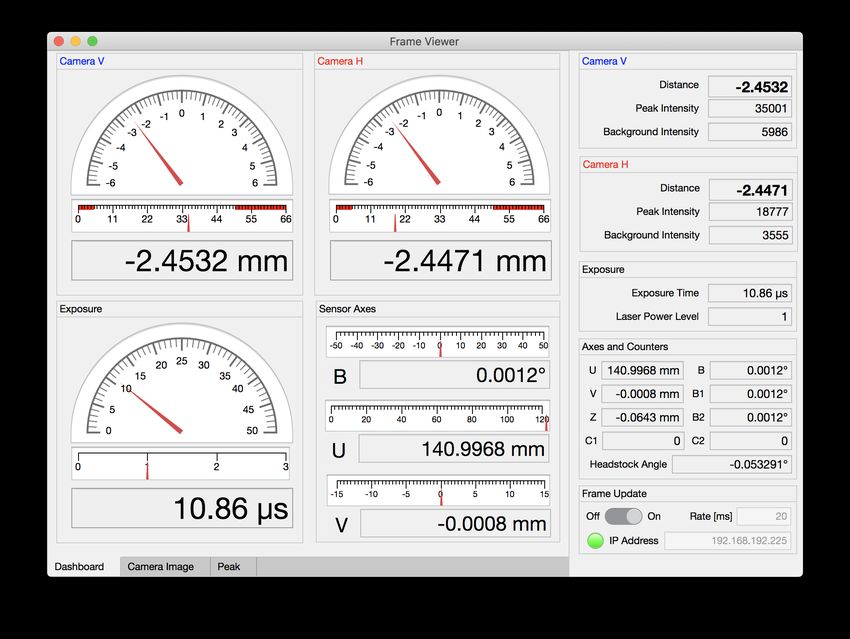
Visualisierung VOLAS 17.04.19; © VOLAS GmbH 25
Steuerung VOLAS 17.04.19; © VOLAS GmbH 26
Warum MATLAB? VOLAS
• App-Designer erlaubt einfache Gestaltung von Benutzeroberflächen auch
ohne besondere Programmiererfahrung.
• Fertige „Widgets“ für die wichtigsten Aufgaben im Laboralltag (z. B.
numerische Eingabefelder, Schalter, Lämpchen).
• Objektorientierter Ansatz des App-Designers ermöglicht auch komplexere
UIs (z. B. mehrere Dialogfenster oder mehrere Instanzen eines Dialogs).
• Reiches Repertoire an graphischen Darstellungsmöglichkeiten.
• Schnell genug auch für animierte Grafiken.
• Vorhandener MATLAB-Code (z. B. Treiber oder Auswertefunktionen) kann
verwendet werden.
• Apps lauffähig unter Windows, Linux und macOS.
17.04.19; © VOLAS GmbH 27VOLAS Simulink
Modellbasierte Prototypentwicklung VOLAS
Erstelle / erweitere Simulink-Modell für Versuchsanordnung
Verifiziere Modell
Ergänze Modell um Signalverarbeitung
Verifiziere Signalverarbeitung
Bereite Signalverarbeitung für HDL-Codegenerierung vor
Generiere HDL-Code und binde ihn in FPGA-Projekt ein
Teste Signalverarbeitung im realen Versuchsaufbau
17.04.19; © VOLAS GmbH 29Beispiel: Moduliertes Michelson-Interferometer VOLAS 17.04.19; © VOLAS GmbH 30
Interferometer + Detektor VOLAS Gelb = Vorgabe, Blau = Messwert 17.04.19; © VOLAS GmbH 31
Warum Simulink? VOLAS
• Simulation fördert das Verständnis für den Versuchsaufbau.
• Entwicklung kann schon beginnen, wenn Hardware noch nicht verfügbar ist.
• Simulink ist datenflussorientiert. Dies entspricht in vielen Fällen der
„natürlichen“ Denkweise bei der Signalverarbeitung und lässt sich
insbesondere auf FPGAs gut abbilden.
• Algorithmen können im Modell zunächst ohne Rücksicht auf vorhandene
Ressourcen entwickelt werden (z. B. mit Fließkommaarithmetik). Dadurch
können Alternativen schneller verglichen werden.
• Für die Anpassung an die Restriktionen der Zielhardware steht automatisch
eine „goldene“ Referenzimplementierung zur Verfügung.
• Codegenerierung ersetzt manuelle Nachimplementierung des fertigen
Algorithmus. Dies spart Zeit und vermeidet Fehler.
• Viele fertige Bausteine verfügbar (z. B. Filter).
• Rückgriff auf MATLAB jederzeit möglich.
17.04.19; © VOLAS GmbH 32VOLAS Fragen?
Sie können auch lesen