Rapid Prototyping mit CANape Version 1.0 2010-11-22
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Rapid Prototyping mit CANape Version 1.0 2010-11-22

Rapid Prototyping mit CANape Inhaltsverzeichnis 1.0 Übersicht..........................................................................................................................................................3 2.0 Funktionsentwicklung mit MATLAB .................................................................................................................4 3.0 Simulink als Ablaufumgebung – CANape als komfortable Bedienoberfläche .................................................4 4.0 CANape als Ablaufumgebung .........................................................................................................................5 5.0 Bypassing mit CANape ....................................................................................................................................5 6.0 Prototyping auf PC-Plattform – Der PC als Steuergerät..................................................................................7 7.0 SiL-Lösung mit CANape ..................................................................................................................................8 8.0 Rapid Prototyping mit xPC Target ...................................................................................................................8 9.0 Rapid Prototyping mit bestehenden ECUs oder EVA-Boards .........................................................................9 10.0 Visualisierung von Simulink/Stateflow-Modellen – CANape Model Explorer ..................................................9 © Vector Informatik 2
Rapid Prototyping mit CANape 1.0 Übersicht Entwicklungsaufgaben lassen sich durch den Einsatz von Standards deutlich effizienter und kostengünstiger lösen. Für die modellbasierte Software-Entwicklung bzw. Rapid Prototyping steht Ihnen der ASAM-Standard XCP zur Verfügung. Über XCP messen und verstellen Sie Code – unabhängig von der genutzten Ablaufumgebung. Es spielt auch keine Rolle in welcher Umgebung der Code entwickelt wurde. Die Nutzung von XCP und CANape ist nicht an die Nutzung bestimmter Entwicklungs-Tools gebunden – traditionell entwickelter Code eignet sich dafür genauso. Aus einem Simulink-Modell wird in der modellbasierten Entwicklung Code und eine Beschreibungsdatei (A2L) für eine bestimmte Ablaufumgebung (Target) generiert. Nach dem Kompilieren und Linken läuft das Modell auf diesem Target. CANape aktualisiert aus der MAP-Datei des Linkers die Adressen in der A2L und ermöglicht Ihnen, das Modell zu messen und zu verstellen. Als Target stehen Ihnen unterschiedliche Lösungen zur Verfügung: CANape, PC mit Win32-Betriebssystem oder Echtzeit-Betriebssystem, dedizierte Rapid Prototyping Hardware, Evaluierungsboards oder Steuergeräte (ECU). CANape und XCP unterstützen dabei vom Beginn der Entwicklung bis zur Serienreife die Funktions- und Software-Entwickler sowie die Applikateure. Unabhängig von der Ablaufumgebung des Codes werden die Simulink-Modelle in CANape über den Model Explorer visualisiert (weitere Informationen finden Sie im gleichnamigen Kapitel 10.0). Nachfolgend erhalten Sie einen Überblick über die CANape Integration in die modellbasierte Software- Entwicklung. © Vector Informatik 3

Rapid Prototyping mit CANape
2.0 Funktionsentwicklung mit MATLAB
Damit andere Programme auf steuergeräteinterne Größen oder Bussignale zugreifen können, stellt CANape
diesen eine Automatisierungsschnittstelle (CANape API) zur Verfügung.
Gesteuert über ein MATLAB M-File werden mit Hilfe der Skriptsprache Mess- und Verstellaufgaben über
CANape realisiert. Das komplette Handling der Treiber und Schnittstellen übernimmt dabei CANape. Damit
werden Aufgaben realisiert, wie z.B. das automatisierte Optimieren von Algorithmen im Steuergerät.
Hinweis: Weitere Informationen finden Sie in der englischsprachigen Application Note
“AN-IMC-1-004 Interface Programming between CANape and MATLAB”
3.0 Simulink als Ablaufumgebung – CANape als komfortable Bedienoberfläche
Im Rahmen der modellbasierten Software-Entwicklung werden die Funktionen der zu entwickelnden Anwendung
in einem iterativen Prozess überprüft. Dazu läuft das Modell immer wieder in Simulink von The MathWorks ab.
Mit der CANape Option Simulink XCP Server erhalten alle Funktions- und Software-Entwickler eine komfortable
Möglichkeit, die Parameter zu verwalten und die Signale aus dem Simulink-Modell heraus effizient und ohne
Instrumentierung zu messen. Enthält das Modell Binärkomponenten, wie z.B. MEXW32 oder DLLs, können diese
dabei ebenfalls per XCP gemessen und verstellt werden.
Die dabei verwendete CANape-Konfiguration kann in einer späteren Entwicklungsphase wiederverwendet
werden.
© Vector Informatik 4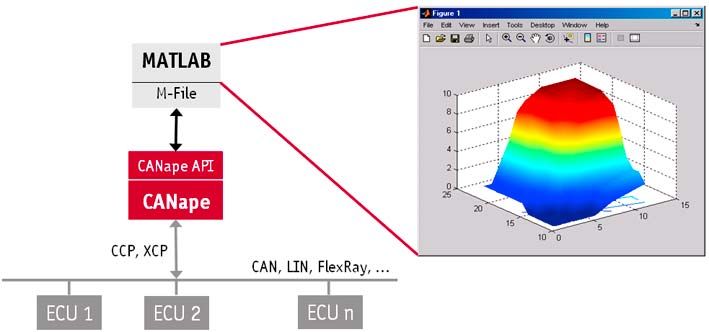
Rapid Prototyping mit CANape
4.0 CANape als Ablaufumgebung
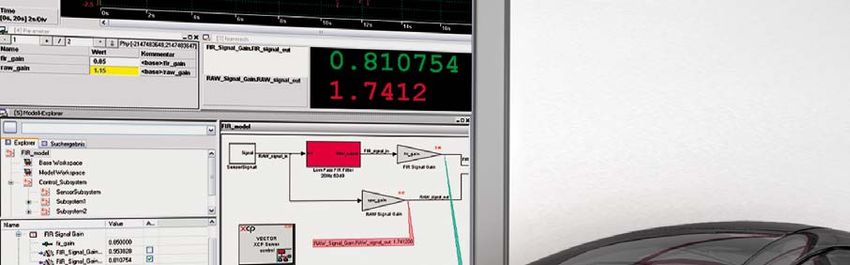
CANape ist eine Ablaufumgebung für in Simulink entwickelte Modelle. Über I/O-Blöcke werden die Ein- und
Ausgänge des Modells mit Größen aus dem CANape Projekt verbunden. Die Code-Generierung erfolgt über den
Real-Time Workshop von The MathWorks. Nach dem Kompilieren steht Ihnen eine DLL zur Verfügung, die mit
CANape zusammen arbeitet und über ein XCP-Interface verfügt. So messen und parametrieren Sie das Modell,
ohne die Parameter erst über Simulink zu verändern und neuen Code zu generieren. Die fertige Parametrierung
kann dann aus CANape exportiert und in MATLAB/Simulink wieder eingelesen werden.
Die Eingangsblöcke erlauben die Übergabe von skalaren Werten, Matrizen und zeitlichen Eingangsvektoren in
die aus dem Modell generierte DLL. Das um die CANape IO-Blöcke erweiterte Modell, kann nach wie vor in
Simulink ablaufen.
Neben der Entwicklung eines Regelalgorithmus, der mit konkreten Daten aus Steuergeräten, Bus- und
Analogdaten etc. versorgt wird, deckt CANape noch andere Anwendungen ab, z.B.:
• Online-Berechnungen während einer Messung
• Offline-Berechnungen zur Auswertung
5.0 Bypassing mit CANape
Ein neuer oder verbesserter Algorithmus soll in ein Steuergerät integriert werden. Dazu wird in Simulink ein
Modell erstellt und über den Real-Time Workshop und das CANape Target Code generiert. Nach dem
Kompilieren und Linken steht Ihnen eine DLL zur Verfügung, die in CANape abläuft.
Über die Standardmechanismen (DAQ) des Kalibrierprotokolls XCP werden Größen aus dem Steuergerät
ereignisgesteuert an CANape gesendet. Die Signale dienen als Eingangsgrößen des Modells. Die
Ausgangsdaten der Berechnung werden über CANape und den XCP-Mechanismen (STIM) synchron in das
Steuergerät zurück geschrieben.
© Vector Informatik 5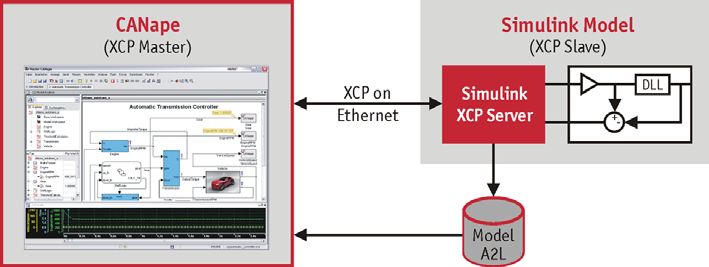
Rapid Prototyping mit CANape Bypassing verursacht dabei keine weiteren Hardwarekosten. Schließlich steht der benötigte Standard-PC jedem Anwender zur Verfügung. Auch wenn ein Windows-Betriebssystem keine klassische Echtzeitumgebung darstellt, lassen sich damit beachtlich kurze Roundtrip-Zeiten von unter 2 ms realisieren: © Vector Informatik 6
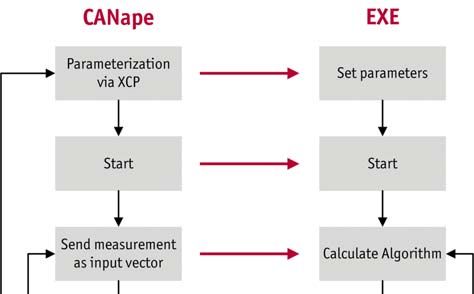
Rapid Prototyping mit CANape 6.0 Prototyping auf PC-Plattform – Der PC als Steuergerät Ihre auf dem PC als virtuelle ECU (DLL) ablaufende Anwendung können Sie mit CANape über XCP on Ethernet komfortabel optimieren. Dabei dienen die aufgezeichneten Daten einer Testfahrt als Eingangsvektoren. Deutlich schneller als im Steuergerät läuft die Anwendung auf dem PC ab. So dauert bspw. die Berechnung einer einstündigen Messfahrt meist nur wenige Sekunden oder Minuten. Die neu aufgezeichnete MDF-Datei entspricht in ihrer Länge der Eingangsmessdatei. Dabei können die Bewertung der Ergebnisse und die Parametrierung sowohl manuell durch den Anwender, als auch durch einen automatisierten Prozess erfolgen. © Vector Informatik 7
Rapid Prototyping mit CANape 7.0 SiL-Lösung mit CANape Steuergeräte-Anwendungen laufen in aller Regel auf einer PC-Plattform deutlich schneller ab als auf der Controller-Plattform. Mit CANape können Sie die Parametrierung der auf dem Entwicklungsrechner (Standard-PC mit Windows- Betriebssystem) ablaufenden Anwendung durchführen, die Berechnung starten und die dabei neu entstehenden Messdaten aus der Anwendung erfassen. Die Anwendung läuft so schnell wie möglich ab und nutzt als Eingangsgrößen beispielsweise die während einer Fahrzeugerprobung aufgezeichneten Messdaten. Die Analyse der neuen Ergebnisse in CANape kann entweder individuell oder automatisiert erfolgen – sie dient als Basis für eine erneute Parametrierung der Anwendung. Nach der Parametrierung liegen die neuen Messergebnisse sehr schnell vor, so dass sich aufgrund der sehr kurzen Iterationszyklen die Entwicklungszeit deutlich verkürzt. Durch Nutzung der identischen Daten als Eingangsvektor werden die Ergebnisse der unterschiedlichen Parametrierungen vergleichbar. Die Kommunikation zwischen CANape und der Anwendung wird über XCP on Ethernet realisiert. Bei der Integration des XCP-Treibers in Ihre Anwendung unterstützt Vector Sie gerne. 8.0 Rapid Prototyping mit xPC Target Das xPC Target von The Mathworks bietet die Möglichkeit, ein Echtzeit-Betriebssystem (RT OS) für eine PC- Hardware-Plattform zu erzeugen. Bei der Codegenerierung des Modells wird automatisch ein XCP-Treiber in das Modell integriert. Als Hardware-Plattform können Sie Standard-PCs oder auch Industrie-PCs nutzen. © Vector Informatik 8
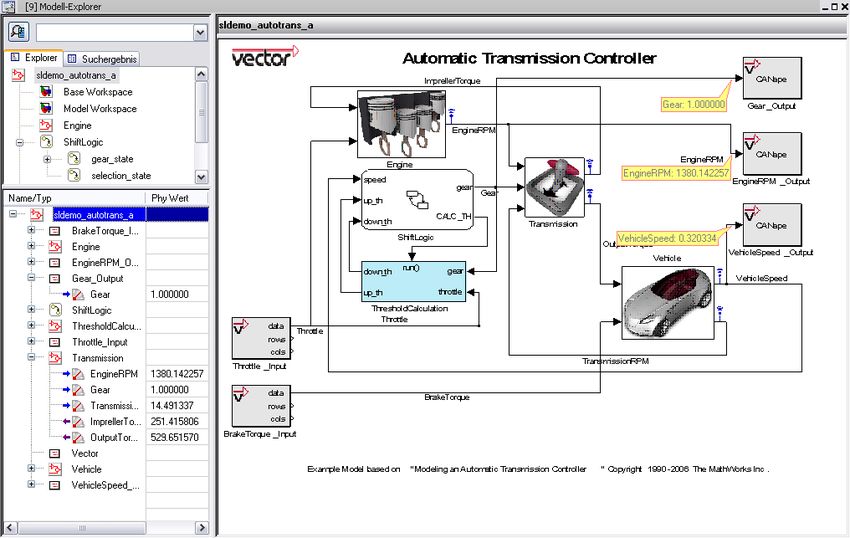
Rapid Prototyping mit CANape 9.0 Rapid Prototyping mit bestehenden ECUs oder EVA-Boards Als sehr kostengünstige Rapid-Prototyping-Hardware bietet sich auch sehr oft das vorhandene Steuergerät der Vorserie an. Der Vorteil ist neben den Kosten auch die Nutzung vorhandener I/Os und die Verfügbarkeit von Protokoll-Stack-Elementen, wie z.B. Diagnose, XCP/CCP oder Netzwerkmanagement. Bei Projekten mit neuen Controller-Plattformen, bieten sich Evaluierungsboards an. Der Zugang zum Board kann einfach über XCP erfolgen. Dazu kann der frei verfügbare Vector XCP Basis-Treiber genutzt werden. Über den Real-Time Workshop Embedded Coder erfolgt dann die Generierung des Codes mit XCP-Treiber für das Evaluierungsboard. 10.0 Visualisierung von Simulink/Stateflow-Modellen – CANape Model Explorer Bei der modellbasierten Software-Entwicklung gibt es in aller Regel zwei unterschiedliche Sichtweisen auf den gleichen Inhalt: Der Software-Entwickler kennt seine Anwendung aus der Simulink-Sicht, während der Applikateur seine steuergerätezentrierte A2L-Sicht hat. Zur vereinheitlichten Darstellung dieser beiden Sichtweisen steht Ihnen der Model Explorer in CANape zur Verfügung. Nach der Installation der zusammen mit CANape ausgelieferten „MATLAB Integration Package“ wird aus dem Simulink-Modell eine grafikbasierte Ansicht des Modells generiert. Diese Grafiken werden in CANape eingebunden und erlauben Ihnen die Navigation durch das Modell. Sie können dabei jede Schicht eines hierarchisch gegliederten Modells ansehen und Verstellgrößen aus der Ansicht direkt auswählen und parametrieren. Die in CANape enthaltene Suchfunktion erlaubt das effiziente Auffinden der Objekte im Modell. Die Grafiken können in jedem CANape Projekt genutzt werden, auch ohne MATLAB/Simulink-Lizenz. Liegt die A2L-Datei des Modells vor, so erlaubt der Model Explorer den Zugriff und die Navigation auf Objekte des Modells. © Vector Informatik 9
Rapid Prototyping mit CANape © Vector Informatik 10
Rapid Prototyping mit CANape
Get more Information!
Visit our Website for:
> News
> Products
> Demo Software
> Support
> Training Classes
> Addresses
www.vector.com
© Vector Informatik 11Sie können auch lesen