Sammlung und Aufbereitung der Einflüsse von Wetterbedingungen auf Radar und Lidar für die Modellbildung - Bachelorthesis Nr. 1362/20 Bearbeiter: ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Sammlung und Aufbereitung der Einflüsse von Wetterbedingungen auf Radar und Lidar für die Modellbildung Bachelorthesis Nr. 1362/20 Bearbeiter: Kristof Hofrichter | 2530549 Betreuer: Clemens Linnhoff, M. Sc. Co-Betreuer: Philipp Rosenberger, M. Sc.
TECHNISCHE
~ UNIVERSITÄT
DARMSTADT
Bachelorthesis Nr. 13 62/20 im Studiengang Me
chanical and Process Engineering (12 CP)
von Kristof Hofrichter
Voraussichtlicher Beginn: 01.07.2020
Bearbeitungsdauer: 3 Monate
Thema: Sammlung und Aufbereitung der Einflüsse von Wetterbe
dingungen auf Radar und Lidar für die Modellbildung
Topic: Coliection andpreparation ofthe influences ofweather
condftions 011 radar and lidar for modeiling
Fachgebiet Fahrzeugtechnik
Am Fachgebiet Fahrzeugtechnik der TU Darmstadt (FZD) wird in Zusammen F~
arbeit mit der Industrie am Thema simulationsbasiertes Entwickeln und Testen
von automatisierten Fahrfunktionen geforscht. Hierbei werden Simulations Prof. Dr. rer. nat. Hermann Winner
modelle der Umfeldsensoren entwickelt. Messungen mit Radar- und Lidar
Otto-Berndt-Straße 2
— sensoren unterliegen vielfältigen Einflüssen der Umgebung auf die Daten. 64287 Darmstadt
Im Rahmen dieser Bachelorthesis sollen die Einflüsse von Wetterbedingungen
wie Regen, Sonnenstrahlung und Nebel auf die Sensorik qualitativ und quan
Bearbeiter:
titativ untersucht werden. Besonders interessant ist dabei die Erarbeitung die Clemens Linnhoff, M. Sc.
ser Einflüsse in einer Darstellungsform, die die unmittelbare Einarbeitung in Tel. ÷49 6151 16— 24xxx
Fax ÷49 6151 16— 24205
Simulationsmodelle ermöglicht. clemens.linnhoff@rn.darmstadt.de
Die Ergebnisse der Bachelorarbeit sollen dazu beitragen, die Abbildungstreue www.fahrzeugtechnik-darmstadt.de
von am Fachgebiet vorhandenen Radar- und Lidar-Simulationsmodellen wei Datum
ter zu erhöhen. 25.06.2020
Im Einzelnen sind folgende Arbeitsschritte auszuführen:
1. Einarbeitung in die Thematik: Radar- und Lidarsensorik für das
hochautomatisierte Fahren von Pkw, Wetterphänomene und de
ren bereits bekannte Auswirkungen auf die genannte Sensorik
2. Begründete Kategorisierung der gesammelten Wetterphänomene
inkl. der Auswahl der Arten der Quantifizierung und deren Gra
nularität
3. Sichten vorhandener Messdaten auf Basis der erfolgten Wetterka
tegorisierung, Aufweisen von Lücken im Messdatenbestand, sowie
Planung und Durchführung von Versuchen zum Füllen der mögli
chen Lücken
4. Untersuchung der Einflüsse der Wetterphänomene auf die Mess
daten innerhalb der Kategorien anhand geeigneter Metrilcen
5. Einarbeitung in die bereits bei FZD vorhandenen Radar- und Li
Seite: 1/2
darmodelle und Beschreibung der Einbindungspunkte für die Wet
terphänomene
cP Dauer Zwischenkolloq (Vortrag / gesamt) Dauer Abschlusskolloq (Vortrag / gesamt)
18 1O/2omin 20/6Omin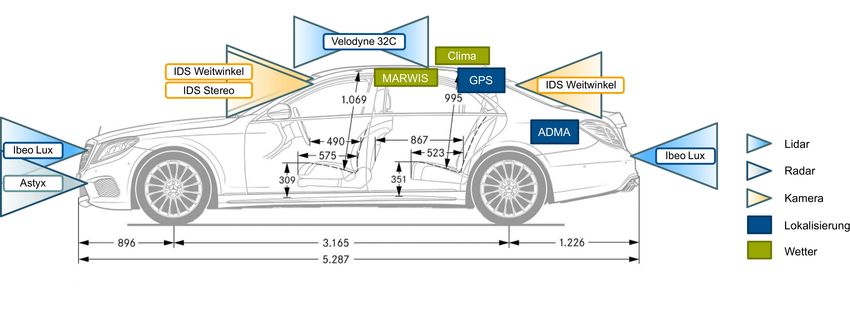
TECHNISCHE
~ UNIVERSITÄT
DARMSTADT
6. Begründete Auswahl einzelner Wetterphänomene für die Model
lerweiterung
7. Geeignete Beschreibung der Einflüsse der Wetterphänomene
durch bspw. stochastische Darstellungen oder in Form von physi
kalischen Gleichungen inklusive der Beschreibung der zusätzli
chen Modellparameter mit dem Ziel der Einbindung der Phäno
mene in die Sensormodelle
Schwerpunkte der Bewertung:
• Methodik des Vorgehens
• Vollständigkeit
• Belastbarkeit der Argumentation
• Nachvollziehbarkeit
Als Ergebnisse der Arbeit werden die Erfüllung der einzelnen Arbeitsschritte
sowie eine ausführliche, leicht nachvollziehbare Dokumentation der erzielten
Erkenntnisse erwartet. Die Abgabe sämtlicher Messdaten und des Programm-
codes in verständlicher Form wird vorausgesetzt. Die Arbeit bleibt Eigentum
des Fachgebiets. Auf das Merkblatt des Fachgebiets wird hingewiesen.
Prof. Dr. rer. nat. Hermann Winner
Clemens Linnhoff, M. Sc. Philipp Rosenberger, M. Sc.
(Betreuer) (Co-Betreuer)
Seite: 2/2
Kristof Hofrichter Matrikelnummer: 2530549 Studiengang: Maschinenbau Bachelorthesis Nr. 1362/20 Thema: Sammlung und Aufbereitung der Einflüsse von Wetterbedingungen auf Radar und Lidar für die Modellbildung Eingereicht: 10. November 2020 Technische Universität Darmstadt Fachgebiet Fahrzeugtechnik Prof. Dr. rer. nat. Hermann Winner Otto-Berndt-Straße 2 64287 Darmstadt This work is available under CC-BY 4.0 International.
Ehrenwörtliche Erklärung
Erklärung zur Abschlussarbeit gemäß § 23 Abs. 7 APB TU Darmstadt
Hiermit versichere ich, Kristof Hofrichter, die vorliegende Bachelor-Thesis ohne Hilfe Dritter und
nur mit den angegebenen Quellen und Hilfsmitteln angefertigt zu haben. Alle Stellen, die Quellen
entnommen wurden, sind als solche kenntlich gemacht worden. Diese Arbeit hat in gleicher oder
ähnlicher Form noch keiner Prüfungsbehörde vorgelegen.
Mir ist bekannt, dass im Falle eines Plagiats (§38 Abs.2 APB) ein Täuschungsversuch vorliegt,
der dazu führt, dass die Arbeit mit 5,0 bewertet und damit ein Prüfungsversuch verbraucht wird.
Abschlussarbeiten dürfen nur einmal wiederholt werden.
Bei der abgegebenen Thesis stimmen die schriftliche und die zur Archivierung eingereichte
elektronische Fassung überein.
English Translation for information purposes only:
Thesis Statement pursuant to § 23 paragraph 7 of APB TU Darmstadt
I herewith formally declare that I, Kristof Hofrichter, have written the submitted thesis inde-
pendently. I did not use any outside support except for the quoted literature and other sources
mentioned in the paper. I clearly marked and separately listed all of the literature and all of the
other sources, which I employed when producing this academic work, either literally or in content.
This thesis has not been handed in or published before in the same or similar form.
I am aware, that in case of an attempt at deception based on plagiarism (§38 Abs. 2 APB), the
thesis would be graded with 5,0 and counted as one failed examination attempt. The thesis may
only be repeated once.
In the submitted thesis, the written copies and the electronic version for archiving are identical in
content.
Matrikelnummer:
Datum / Date: Unterschrift / Signature:
10.11.2020Zusammenfassung Das Thema der vorliegenden Bachelorthesis ist die Untersuchung und Aufbereitung der Auswir- kungen verschiedener Umweltphänomene auf die Radar- und Lidarsensorik. Die Ergebnisse dieser Arbeit dienen als Vorarbeit für die Erweiterung vorhandener Radar- und Lidar-Simulationsmodelle. Zunächst wird hierzu eine Kategorisierung eingeführt, mit derer die Vielzahl an unterschiedlichen Umweltphänomenen einzugrenzen ist und welche zudem die Zusammenhänge der Umweltphä- nomene untereinander klarstellt. Die Erhebungen der untersuchten Messdaten erfolgt auf dem August-Euler-Flugplatz westlich von Darmstadt. Dabei werden statische und dynamische Mes- sungen mithilfe eines Messfahrzeuges durchgeführt, welches mit einem Radarsensor und zwei verschiedenen Lidarsensoren ausgestattet ist. Bei den Messungen gegenwärtige Umweltphänome- ne sind flüssiger Niederschlag, nasse und heiße Oberflächen, hohe Umgebungstemperatur sowie Gischt. Aus diesem Grund beschränkt sich die Untersuchung von Auswirkungen auf die Radar- und Lidarsensorik auf diese Umweltphänomene. Da die Messdaten der untersuchten Sensorik in Form von Punktwolken vorliegen, liegt der Fokus der Untersuchungen in dieser Arbeit auf dem Detektionsverhalten in Gegenwart der genannten Umweltphänomene. In den Daten der statischen Messungen werden aus den Punktwolken die Be- reiche der Fahrbahnoberfläche, der angrenzenden Grasfläche, eines Lidarziels und der Atmosphäre über beziehungsweise vor dem Messfahrzeug untersucht. Bei der dynamischen Messung werden die Auswirkungen der Gischt genauer betrachtet. Das ausgeprägteste Ergebnis der Untersuchun- gen ist, dass besonders die Lidarsensorik einer Vielzahl an Einflüssen unterliegt. Die deutlichsten Auswirkungen zeigen sich bei starkem Niederschlag und treten in Form von zusätzlichen Detek- tionen durch Regentropfen und einer Intensitätsabnahme der Messpunkte aller untersuchten Bereiche auf. Die Radarsensorik hingegen weist eine deutlich geringere Beeinträchtigung infolge des starken Niederschlags auf. Zuletzt wird exemplarisch eines dieser Ergebnisse aufbereitet, um die Einarbeitung in ein Si- mulationsmodell zu ermöglichen. Konkret werden hierzu die zusätzlichen Detektionen durch Regentropfen, wie sie der Velodyne Lidarsensor erfährt, mithilfe einer stochastischen Wahrschein- lichkeitsverteilung beschrieben. Das Resultat dieses Vorgehens ist, dass sich die radiale Entfernung der zusätzlichen Detektionen durch eine Log-Logistische Verteilung beschreiben lässt. Zusammenfassung I
Abstract This bachelor thesis is concerned with the investigation and preparation of effects on radar and lidar caused by environmental influences. The results of this thesis serve as preliminary work for the extension of existing radar and lidar simulation models. First a categorization is introduced which allows to enclose and classify the variety of different environmental phenomena and which also clarifies the interrelationships among them. The collection of measurement data takes place on the August-Euler-Airfield located in the west of Darmstadt. An experimental vehicle equipped with a radar sensor and two different lidar sensors is used in both static and dynamic measurements. Liquid precipitation, wet and dry surfaces, high ambient temperature and (tire) spray are the main environmental phenomena which occur during the measurements and therefore the investigation of effects on radar and lidar is restricted to these five phenomena. Since the measurement data of all sensors is available in form of point clouds the focus of the investigation lies on the impact of different environmental phenomena on the detection level of the sensors. From the point clouds which represent the data collected during the static measurements, the area of the road surface, the adjacent grassland, the lidar target and the atmospheric volume above and in front of the experimental vehicle, are extracted to allow a more specific investigation. The data of the dynamic measurements is used to investigate the influence of tire spray. These investigations show that especially the lidar sensors are subject to a variety of environmental influences. The most distinctive effects show up throughout heavy rain and occur in form of additional atmospheric lidar detections caused by raindrops. Furthermore, a decrease in intensity of the detections can be observed in all of the investigated areas of the point cloud. The radar sensor, on the other hand, shows significantly less impairment during heavy rain. Finally, one of the environmental effects on the sensors is prepared as an example to enable incorporation into a simulation model. In concrete terms the lidar sensors additional detections caused by raindrops are described by a stochastic probability distribution. The result of this approach is that the radial distance of the additional detections can be described by log-logistic probability distribution. Abstract II
Inhaltsverzeichnis
Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . I
Abstract . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . II
Inhaltsverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . III
Formelzeichen und Indizes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . V
Abkürzungsverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VII
Abbildungsverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . VIII
Tabellenverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . X
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.1 Motivation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1
1.2 Konkretisierung der Aufgabenstellung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Methodik des Vorgehens . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
2 Theoretische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1 Sensorik für das automatisierte Fahren von Pkw . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.1 Überblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2.1.2 Radarsensorik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.3 Lidarsensorik. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.1.4 Wettersensorik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 9
2.2 Kategorisierung von Umweltphänomenen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.1 Das 6-Ebenen-Modell . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
2.2.2 Überblick über verschiedene Umweltphänomene. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.2.3 Kategorisierung der Umweltphänomene aus Sensorsicht . . . . . . . . . . . . . . . . . . . . . 14
2.2.4 Untersuchte Wetter- und Umweltphänomene. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Stand der Forschung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2.4 Mathematische Grundlagen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
3 Experimentelle Erhebung von Messdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.1 Statische Regenmessung (Messung 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
3.2 Dynamische Regenmessung (Messung 2) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
3.3 Statische Trockenmessung (Messung 3) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24
3.4 Statische Regenmessung (Messung 4) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4 Auswertung der Messdaten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.1 Vorgehensweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.2 Auswirkungen auf die Lidarsensorik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.2.1 Untersuchung des Raums über/vor dem Messfahrzeug . . . . . . . . . . . . . . . . . . . . . . . 31
4.2.2 Untersuchung des Lidarziels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2.3 Untersuchung der Fahrbahnoberfläche . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.2.4 Untersuchung der Vegetation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
4.3 Auswirkungen auf die Radarsensorik . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
Inhaltsverzeichnis III4.3.1 Untersuchung der CCR . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
4.3.2 Untersuchung der Vegetation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
4.4 Auswirkungen von Gischt auf die Sensorik. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
5 Exemplarische Aufbereitung der Messdaten für die Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.1 Einbindungspunkte . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61
5.2 Stochastische Verteilung der zusätzlichen Detektionen durch Regentropfen. . . . . . . . . 62
5.3 Vergleich der Intensitätsabnahme nasser Oberflächen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
6 Fazit und Ausblick . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 73
Literaturverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82
Inhaltsverzeichnis IVFormelzeichen und Indizes Lateinische Buchstaben: Zeichen Einheit Bezeichnung a m Kantenlänge A − Amplitude c m/s2 Lichtgeschwindigkeit D − Wert der Kullback-Leibler Divergenz f Hz Frequenz G − Antennengewinn tM s Gesamtmessdauer GD − Direkter Antennengewinn H m Objektbreite kxy − Empirischer Korrelationskoeffizient KK − Reflektanz des gemessenen Objekts L W Lichtleistung n − Anzahl an Messpunkten/Detektionen P W Leistung Q rad Strahldivergenz r m Radiale Entfernung eines Messpunktes R m Entfernung s − Standardabweichung SN R − Signal/Rausch-Verhältnis t s Zeit T − Transmission der Atmosphäre Vmp − Faktor für den vertikalen Mehrwegempfang W − Wahrscheinlichkeitsfunktion x̄ − Arithmetisches Mittel Z m2 Empfangslinsenfläche Griechische Buchstaben: Zeichen Einheit Bezeichnung λ m Wellenlänge σ m2 Radarquerschnitt α deg Azimuthwinkel β deg Elevationswinkel ϕ deg Phase ρ rad Winkel der Objektreflexion µ − Lageparameter der Log-Logistischen Verteilung ψ − Skalenparameter der Log-Logistischen Verteilung η − Lageparameter der Generalisierten Extremwertverteilung κ − Skalenparameter der Generalisierten Extremwertverteilung ξ − Formparameter der Generalisierten Extremwertverteilung Formelzeichen und Indizes V
Indizes: Zeichen Bezeichnung chirp Chirp doppler Doppler gev Generalisierte Extremwertverteilung ll Log-Logistische Verteilung max maximal mean,L Gemittelt für eine Detektionsebene N Rausch r Empfang ramp Rampe t Gesendet threshold Schwelle total Gesamt total,L Gesamt für eine Detektionsebene v Vertikal Formelzeichen und Indizes VI
Abkürzungsverzeichnis CCR Corner Cube Reflector CDF Cumulative Distribution Function FoV Field of View FZD Fahrzeugtechnik Darmstadt GEV Generalisierte Extremwertverteilung Lkw Lastkraftwagen ODD Operational Design Domain Pkw Personenkraftwagen RCS Radar Cross Section TUDa Technische Universität Darmstadt Abkürzungsverzeichnis VII
Abbildungsverzeichnis 2-1 Darstellung des Messfahrzeugs mit verwendeter Sensorik . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4 2-2 Aufbau eines CCR. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5 2-3 Pulsantwort zweier Objekte und Pulsantwort Nebel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8 2-4 Schematische Darstellung der fünften Ebene und der resultierenden Definitionen . 13 2-5 Kategorisierung und Einordnung aller betrachteten Wetter- und Umweltphänomene 14 2-6 Kategorisierung der Umweltphänomene aus Sensorsicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 2-7 Niederschlagsintensität und Wasserfilmhöhe der ersten Messung . . . . . . . . . . . . . . . . . . . . 16 3-1 Versuchsaufbau der ersten Messung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22 3-2 Versuchsaufbau der zweiten Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 24 3-3 Versuchsaufbau der dritten Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 3-4 Versuchsaufbau der vierten Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26 4-1 Seitenansicht der Punktwolke des Velodyne ohne Regen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 4-2 Seitenansicht der Punktwolke des Velodyne bei Regen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28 4-3 Anzahl an Detektionen des Velodyne ohne Bereichsfilter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 4-4 Mittlere Intensität der Detektionen des Velodyne ohne Bereichsfilter . . . . . . . . . . . . . . . . 30 4-5 Filterbereiche für die Untersuchung der Ibeos und Astyx . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31 4-6 Darstellung des Bereichs über dem Messfahrzeug . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32 4-7 Detektionen des Velodyne im Bereich über dem Messfahrzeug (Messung 1) . . . . . . . . 33 4-8 Detektionen des IbeoFront im Bereich vor dem Messfahrzeug (Messung 1) . . . . . . . . . 34 4-9 Maximale Entfernung der Detektionen des IbeoFront (Messung 1) . . . . . . . . . . . . . . . . . . 34 4-10 Velodyne Mittlere Intensität der Detektionen im Bereich des Lidarziels . . . . . . . . . . . . . 35 4-11 Velodyne Maximale Entfernung zum Lidarziel (Messung 1) . . . . . . . . . . . . . . . . . . . . . . . . . . 36 4-12 Ibeo Mittlere Intensität der Detektionen im Bereich des Lidarziels . . . . . . . . . . . . . . . . . . . 37 4-13 Ibeo Maximale Entfernung zum Lidarziel . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 4-14 Vorderer und hinterer Bereich um die Fahrbahnoberfläche . . . . . . . . . . . . . . . . . . . . . . . . . . . 38 4-15 Mittlere Intensität der Fahrbahnoberfläche (Messung 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39 4-16 Anzahl an Detektionen der Fahrbahnoberfläche (Messung 1) . . . . . . . . . . . . . . . . . . . . . . . . 39 4-17 Punktwolke der fast trockenen Fahrbahnoberfläche im vorderen Filterbereich. . . . . . 40 4-18 Mittlere Intensität des Velodyne im vorderen Filterbereich bei −25° . . . . . . . . . . . . . . . . . 41 4-19 Mittlere Intensität des Velodyne im vorderen Filterbereich bei −4,667° . . . . . . . . . . . . . . 42 4-20 Anzahl an Detektionen des Velodyne im vorderen Filterbereich bei −25° . . . . . . . . . . . . 43 4-21 Anzahl an Detektionen des Velodyne im vorderen Filterbereich bei −4,667° . . . . . . . . 44 4-22 Punktwolke der nassen Fahrbahnoberfläche im vorderen Filterbereich . . . . . . . . . . . . . . 44 4-23 Mittlere Intensität der Winkel bei annähernd trockener Fahrbahn . . . . . . . . . . . . . . . . . . . 45 4-24 Mittlere Intensität der Winkel bei Fahrbahntemperatur 32,2 °C . . . . . . . . . . . . . . . . . . . . . . 46 4-25 Mittlere Intensität bei unterschiedlicher Fahrbahntemperatur . . . . . . . . . . . . . . . . . . . . . . . 47 4-26 Schema der Spiegelung des Lidarziels an der nassen Fahrbahnoberfläche . . . . . . . . . . . 47 4-27 Velodyne Vergleich der Punktwolken des Lidarziels . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48 4-28 Velodyne Anzahl an Detektionen der Lidarspiegelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 4-29 Velodyne Mittlere Intensität der Lidarspiegelung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49 4-30 Anzahl an Detektionen der Grasfläche (Messung 1). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51 Abbildungsverzeichnis VIII
4-31 Velodyne Mittlere Intensität der Grasfläche (Messung 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52 4-32 Ibeo Mittlere Intensität der Grasfläche (Messung 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53 4-33 Ibeo Anzahl an Detektionen der Grasfläche (Messung 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54 4-34 Astyx Mittlere Intensität des rechten CCR (Messung 4). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55 4-35 Astyx Mittlere Intensität der Grasfläche (Messung 1) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56 4-36 Filterbereiche zur Untersuchung der Gischt. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57 4-37 Velodyne Anzahl an Detektionen des vorderen Filterbereichs (Messung 2). . . . . . . . . . 58 4-38 Punktwolke der Gischt des Velodyne im vorderen Filterbereich . . . . . . . . . . . . . . . . . . . . . . 58 4-39 Punktwolke der Gischt des Ibeo neben dem vorderen Filterbereich . . . . . . . . . . . . . . . . . . 59 4-40 Velodyne Detektionen der Gischtwolke hinter dem Messfahrzeug . . . . . . . . . . . . . . . . . . . 60 4-41 Ibeo Detektionen der Gischtwolke hinter dem Messfahrzeug . . . . . . . . . . . . . . . . . . . . . . . . . 61 5-1 CDF-Plot der Niederschlagskategorie 40 bis 60 mm/h bei 15° Elevationswinkel . . . . 65 5-2 CDF-Plot bei 1° Elevationswinkel mit optimalen Parametern . . . . . . . . . . . . . . . . . . . . . . . . . 68 5-3 CDF-Plot bei 1° Elevationswinkel mit gemittelten Parametern . . . . . . . . . . . . . . . . . . . . . . . . 68 5-4 Anzahl an Detektionen der Elevationswinkel für 40 bis 60 mm/h Niederschlag . . . . 69 5-5 Velodyne Mittlere Intensität der Regentropfen Detektionen (Messung 1) . . . . . . . . . . . 70 6-1 Anzahl an Detektionen im Bereich über dem Messfahrzeug (Messung 1) . . . . . . . . . . . 73 6-2 Mittlere Intensität der Winkel bei nasser Fahrbahn. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 74 6-3 Mittlere Intensität der Winkel bei Fahrbahntemperatur 32,2 °C . . . . . . . . . . . . . . . . . . . . . . 74 Abbildungsverzeichnis IX
Tabellenverzeichnis 2-1 Tabellarische Übersicht des 6-Ebenen-Modells. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11 2-2 Kategorisierung der Niederschlagsintensitäten des Deutschen Wetterdienst . . . . . . . . 15 2-3 Kategorisierung der Niederschlagsintensitäten für die Untersuchungen . . . . . . . . . . . . . 17 3-1 Übersicht über die vier Messungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 3-2 Temperaturübersicht der dritten Messung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25 5-1 Anzahl an Zeitpunkten für die fünf Niederschlagskategorien. . . . . . . . . . . . . . . . . . . . . . . . . 64 5-2 Statistische Auswertung der Niederschlagskategorie 20 bis 40 mm/h . . . . . . . . . . . . . . . 64 5-3 KLD-Werte D in Bit für die Niederschlagskategorie 20 bis 40 mm/h . . . . . . . . . . . . . . . . . 66 5-4 Parameter der Log-Logistischen Verteilung bei 20 bis 40 mm/h Niederschlag . . . . . . 67 5-5 Abnahme der Mittleren Intensität bei nassen Oberflächen. . . . . . . . . . . . . . . . . . . . . . . . . . . . 70 6-1 Alle Detektionsebenen des Velodyne mit Elevationswinkel . . . . . . . . . . . . . . . . . . . . . . . . . . . 73 6-2 Statistische Auswertung der Niederschlagskategorie 0 bis 10 mm/h . . . . . . . . . . . . . . . . . 75 6-3 Statistische Auswertung der Niederschlagskategorie 10 bis 20 mm/h . . . . . . . . . . . . . . . 75 6-4 Statistische Auswertung der Niederschlagskategorie 40 bis 60 mm/h . . . . . . . . . . . . . . . 76 6-5 Statistische Auswertung der Niederschlagskategorie über 60 mm/h . . . . . . . . . . . . . . . . . 76 6-6 Übersicht über die untersuchten Wahrscheinlichkeitsverteilungen . . . . . . . . . . . . . . . . . . . 77 6-7 KLD-Werte in Bit für die Niederschlagskategorie 0 bis 10 mm/h . . . . . . . . . . . . . . . . . . . . . 77 6-8 KLD-Werte in Bit für die Niederschlagskategorie 10 bis 20 mm/h. . . . . . . . . . . . . . . . . . . . 78 6-9 KLD-Werte in Bit für die Niederschlagskategorie 40 bis 60 mm/h. . . . . . . . . . . . . . . . . . . . 78 6-10 KLD-Werte in Bit für die Niederschlagskategorie über 60 mm/h . . . . . . . . . . . . . . . . . . . . . 79 6-11 Parameter der Log-Logistischen Verteilung bei 0 bis 10 mm/h Niederschlag . . . . . . . . 79 6-12 Parameter der Log-Logistischen Verteilung bei 10 bis 20 mm/h Niederschlag . . . . . . 80 6-13 Parameter der Log-Logistischen Verteilung bei 40 bis 60 mm/h Niederschlag . . . . . . 80 6-14 Parameter der Log-Logistischen Verteilung bei über 60 mm/h Niederschlag . . . . . . . . 81 Tabellenverzeichnis X
1 Einleitung
1.1 Motivation
Die Ankündigung von Mercedes-Benz, die neue S-Klasse aus dem Jahr 2020 mit Fahrassistenzsyste-
men auszustatten, welche dem Automatisierungslevel 3 der SAE International (SAE)1 entsprechen,
stellt eine neue Qualität an Komfort und Sicherheit für das Fahren auf deutschen Autobahnen
dar.2 Die SAE Level beschreiben in sechs Stufen den Automatisierungsgrad eines Systems von
Level 0 (keine Automatisierung) bis Level 5 (vollständige Automatisierung). Während Fahras-
sistenzsysteme der Level 0 bis 2 einer permanenten Überwachung des Fahrers bedürfen, wird
dies für Systeme ab Level 3 (bedingte Automatisierung) nicht mehr gefordert. Stattdessen muss
der Fahrer bei Systemen dieses Levels bereit sein, die Fahraufgabe bei Aufforderung durch das
System zu übernehmen.1 Mit der Markteinführung automatisierter Systeme des Levels 3 setzt
Mercedes-Benz einen Meilenstein, welcher die stetig fortschreitende Entwicklung von automati-
sierten Fahrzeugen exemplarisch aufzeigt und beweist, dass die technologischen Voraussetzungen,
die für das automatisierte Fahren (d.h. mit Automatisierungslevel 3 oder höher) benötigt werden,
bereits verfügbar sind.3
Einer der Gründe, warum diese Systeme bisher dennoch nicht im öffentlichen Verkehr eingesetzt
werden, sind die hohen Sicherheitsanforderungen, welche an diese gestellt werden und die Schwie-
rigkeit, einen passenden Nachweis der Sicherheit zu erbringen.4 Während die Verantwortung
für eine angemessene Reaktion auf bestimmte Fahrsituationen bei Assistenzsystemen der Level 1
und 2, wie sie bereits länger im Einsatz sind, bei dem Fahrer liegt, wird die Verantwortung bei
höheren Level teilweise auf das System übertragen. Dieser Umstand erfordert neue Methodiken
zur Validierung automatisierter Systeme. Zum einen sind die Sicherheitsstandards zur Beurteilung
automatisierter Fahrzeuge noch in der Entwicklung, zum anderen muss nachgewiesen werden,
dass die automatisierten Fahrzeuge diese Sicherheitsstandards einhalten können.4
Eine beispielhafte theoretische Berechnung zeigt, dass ein automatisiertes Fahrzeug mehrere
Milliarden an Testkilometern auf öffentlichen Straßen absolvieren müsste, um eine im Vergleich
zu einem konventionellen Fahrzeug doppelte Sicherheit nachzuweisen.5 Ein derartiger Umfang an
Testkilometern ist wirtschaftlich jedoch nicht zu bewältigen, besonders da jede weitere Fahrfunkti-
on erneut getestet werden muss.3 Weiterhin stellt neben der Gefahr für andere Verkehrsteilnehmer
auch die lange Testdauer eine große Herausforderung dar.
Eine mögliche Lösung dieser Probleme bietet die Computersimulation der automatisierten Fahr-
funktionen. In diesem Zusammenhang wird am Fachgebiet Fahrzeugtechnik der TU Darmstadt
(FZD), in Zusammenarbeit mit der Industrie, am Thema simulationsbasiertes Entwickeln und
Testen von automatisierten Fahrfunktionen geforscht. Ziel der Forschung ist es, Simulations-
modelle für die Umfeldsensorik zu entwickeln und zu testen. Diese Sensorik unterliegt in der
1
SAE:J3016: Taxonomy and Definitions for Driving Automation Systems (2018).
2
ADAC: Mercedes S-Klasse 2020 (2020).
3
Sauerbier, J. et al.: Definition of Scenarios for Safety Validation (2019).
4
Amersbach, C. T.: Diss., Functional Decomposition Approach (2020), S. 1f.
5
Wachenfeld, W.; Winner, H.: Die Freigabe des autonomen Fahrens (2015), S. 457 f.
1. Einleitung 1Realität einer Vielzahl von Einflüssen. Zu erwähnen sind hierbei besonders die Umweltbedingun- gen einschließlich des Wetters. Diese sind in jeder realen Fahrsituation in unterschiedlichsten Ausprägungen gegenwärtig. Dementsprechend sind die Auswirkungen dieser Wettersituationen auf die Sensorik von grundlegender Bedeutung und bilden somit den zentralen Gegenstand der nachfolgenden Untersuchung. Ziel der Arbeit ist somit, die Auswirkungen von Wettereinflüssen auf die Sensorik zu untersuchen und aufzubereiten, um so im nächsten Schritt die Einarbeitung in ein Simulationsmodell zu ermöglichen. 1.2 Konkretisierung der Aufgabenstellung In dieser Bachelorarbeit werden die Auswirkungen verschiedener Wettereinflüsse auf die in auto- matisierten Fahrzeugen eingesetzte Sensorik untersucht. Die Betrachtung beschränkt sich dabei auf die Radar- und Lidarsensorik und die konkrete Aufgabe besteht darin, das Detektionsverhal- ten der Sensorik bei unterschiedlichen Wetterbedingungen wie zum Beispiel Regen, Nebel und Sonne zu untersuchen. Um die Vielzahl an unterschiedlichen Wettereinflüssen abzugrenzen und einzuordnen, wird eine Kategorisierung der Wettereinflüsse gefordert. Auf Basis der erfolgten Wetterkategorisierung werden die bereits vorhandenen Wettermessdaten geordnet und dadurch eventuelle Messlücken ermittelt. Daraus erschließt sich als weiterer Bestandteil die Vorbereitung und Durchführung von Messungen mit einem Messfahrzeug, welches mit der entsprechenden Radar- und Lidarsensorik ausgestattet ist. Obwohl der Fokus der Arbeit auf der Kategorisierung der Wettereinflüsse und den wetterbedingten Auswirkungen auf das Detektionsverhalten der Sensorik liegt, stellt auch das Aufbereiten der Beobachtung für die Einbindung in ein Simulati- onsmodell einen Teil der Aufgabenstellung dar. Die Messdaten werden aufbereitet, indem die Beobachtungen der Sensorik in Form von stochastischen Beschreibungen oder physikalischen Gleichungen formuliert werden. 1.3 Methodik des Vorgehens Das Vorgehen bei der Bearbeitung der Aufgabenstellung wird im Folgenden beschrieben. Nach der erfolgten Kategorisierung der Wettereinflüsse wird zunächst festgestellt, welche Untersuchungen auf Basis der bereits vorhandenen Messdaten durchzuführen sind. Da die Messungen alle in Deutschland im Zeitraum von Mai bis Oktober stattfinden, beschränkt sich die Untersuchung hauptsächlich auf Niederschlag und sonniges Wetter. Daher werden zunächst die Auswirkungen von Regen, nasser Fahrbahnoberfläche und hohen Umgebungstemperaturen untersucht. Dazu werden die Messdaten, welche in Form von Punktwolken vorliegen, mit der Software MATLAB veranschaulicht und mathematisch ausgewertet. Hierfür wird der Korrelationskoeffizient verwen- det, um Zusammenhänge zwischen den Sensormessdaten und den Wettermessdaten zu ermitteln. Die Ergebnisse werden in Form von Plots und Boxplots visualisiert. Des Weiteren wird untersucht, wie Gischtwolken sich auf die Sensorik auswirken, indem ermittelt wird, welche Sensoren die Gischtwolken in welchem Ausmaß detektieren. Da der Hauptfokus nicht auf der Aufbereitung der Beobachtungen für die Simulation liegt, wird für diesen Abschnitt die markanteste Beobach- tung für eine exemplarische Aufbereitung ausgewählt. Die Beobachtung ist mit den zusätzlichen Detektionen des Lidarsensors durch Regentropfen gegeben. Für diese zusätzlichen Detektionen erfolgt eine stochastische Beschreibung mithilfe einer Wahrscheinlichkeitsverteilung. Nachdem 1. Einleitung 2
die Wahrscheinlichkeitsverteilung mithilfe der Kullback-Leibler Divergenz gefunden ist, wird diese anschließend noch parametrisiert. 2 Theoretische Grundlagen In diesem Kapitel werden die Grundlagen beschrieben, welche zum Verständnis der nachfolgenden Untersuchungen notwendig sind. Zunächst werden auf die technischen Grundlagen der Sensorik für das automatisierte Fahren eingegangen. Auf eine kurze Beschreibung der Wettersensorik folgt die Kategorisierung der Umweltphänomene. Abschließend erfolgt eine Einführung in die mathematischen Grundlagen und ein kurzer Überblick über den Stand der Forschung wird vorgenommen. 2.1 Sensorik für das automatisierte Fahren von Pkw 2.1.1 Überblick Zunächst erfolgt in diesem Kapitel eine kurze Übersicht über die verwendete Sensorik anhand des eingesetzten Messfahrzeugs. Eine Darstellung des Messfahrzeugs ist in Abbildung 2-1 zu sehen. Für die Durchführung der Messungen sind in dem Messfahrzeug neben drei Lidarsensoren und einem Radarsensor auch drei Kameras verbaut. In der Frontstoßstange und der Heckstoßstange ist jeweils ein Lidarsensor Ibeo Lux (im weiteren Verlauf als Ibeo bezeichnet) des Herstellers Ibeo Automotive Systems GmbH verbaut. Der vordere Ibeo befindet sich ca. 62 cm, der hintere ca. 58 cm über der Fahrbahnoberfläche. Auf dem Dach des Messfahrzeugs ist in einer Höhe von ca. 2 m über dem Boden der Lidarsensor VLP32-C (im weiteren Verlauf als Velodyne bezeichnet) des Herstellers Velodyne Lidar angebracht. In der vorderen Stoßstange befindet sich ebenfalls der Radarsensor HiRes 6455 (im weiteren Verlauf als Astyx bezeichnet) des Herstellers Astyx GmbH. Dieser ist ca. 50 cm über der Fahrbahnoberfläche angebracht. Neben diesen vier Sensoren sind noch drei Kameras des Herstellers IDS Imaging Development Systems GmbH verbaut. Die Kameras befinden sich dabei im Innenraum des Fahrzeuges. Zwei sind nach vorne und eine nach hinten ausgerichtet. Da der Fokus in dieser Arbeit jedoch auf der Radar- und Lidarsensorik liegt, werden diese von der näheren Betrachtung ausgeschlossen. Die Kameras werden ausschließlich genutzt, um die Wetterverhältnisse optisch zu beurteilen. Um die Wetterverhältnisse genauer zu erfassen, ist das Messfahrzeug mit einem Climasensor des Herstellers Adolf Thies GmbH & Co. KG und einem Strassenwetter-Sensor des Herstellers G. Lufft Mess- und Regeltechnik GmbH ausgestattet. Der Strassenwetter-Sensor ist hinten rechts am Messfahrzeug befestigt. Für die Lokalisierung des Fahrzeugs sind zudem Sensoren des Herstellers GeneSys Elektronik GmbH verbaut. 2. Theoretische Grundlagen 3
Abbildung 2-1: Darstellung des Messfahrzeugs mit verwendeter Sensorik.6
2.1.2 Radarsensorik
Grundlagen
Radar (Radio Detection and Ranging) beschreibt ein Messverfahren, anhand dessen die Entfernun-
gen und Positionen von Objekten sowie deren Relativgeschwindigkeiten bestimmt werden. Hierzu
wird ein Signal in Form einer elektromagnetischen Welle durch eine oder mehrere Antennen
ausgesendet. Trifft eine solche Welle anschließend auf ein Objekt, wird sie von diesem zurück
reflektiert und von mindestens einer Empfangsantenne am Ursprung detektiert. Die Entfernung zu
dem Objekt berechnet sich auf Basis der zeitlichen Differenz zwischen Aussenden und Empfangen
des Signals. Gegenwärtig relevante Frequenzbereiche sind 21,65-26,65 GHz, 24,0-24,25 GHz
sowie 76-77 GHz. Dominierend in der automobilen Anwendung ist der Bereich um 76,5 GHz, was
einer Wellenlänge λ von ungefähr 4 mm entspricht.7a
Die ausgesendete elektromagnetische Strahlung wird mithilfe der harmonischen Wellenfunktion
beschrieben:7b
ut (t) = At · cos(2πf t + ϕ) (2-1)
Dabei steht At für die Amplitude der Welle. Die Frequenz wird mit f und die Phase mit ϕ
angegeben.
Bei der Reflexion einer elektromagnetischen Welle durch ein Objekt, das sich relativ zum Radar
bewegt, kommt es zu einer Frequenzverschiebung. Dieser Effekt wird Doppler-Effekt genannt. Sei
r die Entfernung zu dem bewegten Objekt und ṙ die Änderung dieser Entfernung über die Zeit,
dann wird die Frequenzänderung fdoppler mit der Lichtgeschwindigkeit c beschrieben durch:7b
fdoppler = −2ṙ f /c (2-2)
6
Interne Darstellung, Clemens Linnhoff, FZD sowie Mercedes-Benz: Mercedes S-Klasse (2020).
7
Winner, H.: Radarsensorik (2015). a: S. 260; b: S. 264 f
2. Theoretische Grundlagen 4Diese Frequenzverschiebung ermöglicht es, die Relativgeschwindigkeit zu einem bewegten Objekt
zu bestimmen. Das Vorzeichen der Frequenzverschiebung ist bei einer Annäherung an das Objekt
positiv, bei zunehmender Entfernung negativ.8a
Reichweite
Die Reichweite von Radarsensoren wird durch eine Anzahl verschiedener Faktoren bestimmt, auf
die im Folgenden genauer eingegangen wird.
Ein maßgeblicher Faktor ist der Radarquerschnitt des Ziels, dieser wird auch Radar Cross Section
(RCS) genannt und mit σ bezeichnet. Die Einheit von σ wird in m2 angegeben. Entscheidend für
den Radarquerschnitt eines Ziels ist dessen Geometrie und Orientierung. Eine Metallplatte, die
senkrecht (d.h. im 90° Winkel) auf die Ausbreitungsrichtung der elektromagnetischen Strahlung
ausgerichtete ist, weist einen deutlich höheren RCS auf als die gleiche Metallplatte in gedrehter
Position. Das liegt darin begründet, dass bei einem Winkel von 90° die Strahlung direkt zurück
in Richtung des Empfängers und bei einer Drehung der Platte von diesem weg reflektiert wird.
Ein idealer Reflektor ist ein sogenannter Corner Cube Reflector (CCR), dessen Geometrie in
Abbildung 2-2 zu sehen ist. Die drei aufeinander senkrecht stehenden Flächen bewirken eine
Reflexion der eingehenden Strahlung zurück zu ihrem Ursprung, unabhängig davon, in welchem
Winkel sie auf den CCR treffen. Durch die Reflexionseigenschaften lassen sich auch Ziele mit
einer Leistung äquivalent eines Pkw simulieren. Der Radarquerschnitt eines CCR wird berechnet
durch:8b
a4
σCCR = 4π (2-3)
3λ2
Mit a ist die Kantenlänge, wie auch in 2-2 zu sehen, bezeichnet. Um, wie oben genannt, einen
Pkw zu simulieren, bedarf es einer Kantenlänge von ca. 0,14 m.8b
Abbildung 2-2: Aufbau eines CCR mit Kantelänge a.9
Die Radarstrahlung wird von der Antenne in gebündelter Form ausgesendet und somit wird die
Intensität nicht gleichmäßig über den Raum verteilt, wie dies bei einer Kugelwelle der Fall ist. Es
existiert folglich ein Raumwinkel, bei dem die Intensität der Strahlung ein Maximum besitzt. Der
8
Winner, H.: Radarsensorik (2015). a: S. 264; b: S. 261 f
9
Überarbeitete Darstellung nach Winner, H.: Radarsensorik (2015), S. 261, Abb. 17.2.
2. Theoretische Grundlagen 5Quotient aus dieser vom Raumwinkel abhängigen maximalen Intensität und dem Wert Ptotal /4π
eines homogenen Kugelstrahlers beschreibt den direkten Antennengewinn GD . Dabei wird eine
gleiche Gesamtleistung c vorausgesetzt. Der tatsächliche Antennengewinn G beinhaltet weiterhin
die Leistungsverluste der Antenne.10a
Ein weiterer Faktor, der die Reichweite beeinflusst, ist die vertikale Mehrwegausbreitung, welche
durch Reflexionen der Radarstrahlung an der Fahrbahnoberfläche verursacht wird. Werden Ra-
darstrahlen über die Fahrbahnoberfläche auf ein Ziel gelenkt, legen diese einen längeren Weg
zurück als Radarstrahlen, die direkt auf jenes Ziel treffen. Durch die unterschiedlichen Weglängen
überlagern sich die Radarstrahlen am Empfänger und rufen konstruktive sowie die Reichweite
erheblich beeinträchtigende destruktive Interferenzen hervor. Der vertikale Mehrwegempfang
wird durch den Faktor Vmp 2
beschrieben, welcher Werte von 0 bis 2 annimmt.10b
Damit ein Empfangssignal detektiert wird, ist es notwendig, dass dessen Leistung Pr sich von
der Leistung des Rauschens PN abhebt. Das Verhältnis dieser Leistungen wird als Signal/Rausch-
Verhältnis (SNR) bezeichnet. Durch einen Schwellwert wird die zur Detektion minimal nötige
Leistung eines Eingangssignals festgelegt. Diese Detektionsschwelle berechnet sich durch einen
Faktor SN Rthreshold multipliziert mit der Rauschleistung PN . Da die Empfangsleistung unter
anderem von der Entfernung r zum Ziel abhängt, lässt sich eine maximale Reichweite rmax
bestimmen, bei der die Empfangsleistung gerade noch über der Detektionsschwelle liegt. Bei
Entfernungen größer rmax fällt die entsprechende Empfangsleistung unter die Detektionsschwelle
und das Signal wird unterdrückt. Die maximale Reichweite wird somit bestimmt, indem die
Empfangsleistung Pr mit der Detektionsschwelle gleichgesetzt wird und berechnet sich konkret
durch:10b
√︄
σλ2 · Gt · Gr · Vmp
2 ·P
total
rmax = 4 3
(2-4)
(4π) · PN · SN Rthreshold
Anzumerken ist, dass hier die Dämpfung vernachlässigt wird und Gt = Gr anzunehmen ist, wenn
dieselbe Antenne für Empfangen und Senden verwendet wird.10b
Modulation und Demodulation
Um mit dem Radar die Entfernung oder die Geschwindigkeit eines Ziels zu bestimmen, werden
die empfangenen den gesendeten Signalen zugeordnet. Dies geschieht, indem den Signalen
senderseitig Informationen aufmoduliert und empfängerseitig wieder demoduliert werden. Wie
die Formel (2-1) bereits gezeigt hat, werden elektromagnetische Wellen durch die Amplitude
A, die Frequenz f und die Phase ϕ beschrieben. Diese drei Variablen können moduliert werden,
um ein Signal zu kennzeichnen. Im Automobil kommen meist die Amplitudenmodulation als
Pulsmodulation und die Frequenzmodulation zum Einsatz.10c
Die Pulsmodulation erzeugt kurze Pulse, indem nacheinander kurze Wellenzüge gebildet werden.
Die Frequenzmodulation wiederum ändert die Frequenz f als Funktion der Zeit. An dieser Stelle
10
Winner, H.: Radarsensorik (2015). a: S. 260 f; b: S. 262 f; c: 264
2. Theoretische Grundlagen 6wird nicht genauer auf die verschiedenen Methoden dieser Modulationsverfahren eingegangen.
Lediglich die sogenannte Chirp Sequence Modulation wird im Folgenden kurz vorgestellt.11a
Chirp Sequence Modulation
Bei der Chirp Sequence Modulation wird über die Gesamtmessdauer tM eine Anzahl nramp iden-
tischer linearer Frequenzrampen wiederholt. Die Länge der einzelnen Frequenzrampen wird
mit tramp = tM /nramp berechnet. Die Höhe der Rampe fchirp liegt im Bereich von 30 - 300 MHz.
Die Messdaten werden nach dem Empfang mit einer zwei-dimensionalen Fouriertransformati-
on weiterverarbeitet und das Ergebnis von Entfernung und Geschwindigkeit liegt anschließend
in einem zwei-dimensionalen Spektrum vor. Die Auflösungen der beiden Messgrößen werden
mit ∆r = c/2fchirp und ∆ṙ = c/2f tM bestimmt und sind somit abhängig von der Höhe der Fre-
quenzrampe und der Gesamtmessdauer. Mit der Chirp Sequence Modulation wird eine optimale
Ausnutzung der Sendeleistung, der Bandbreite und der Messzeit ermöglicht.11b
In dieser Arbeit verwendeter Radarsensor
In dieser Arbeit wird der Radarsensor HiRes 6455 des Herstellers Astyx GmbH verwendet. Der
Radar verwendet eine Frequenz von 77 GHz, was einer Wellenlänge von ca. 4 mm entspricht.
2.1.3 Lidarsensorik
Grundlagen
Lidar steht für Light Detection And Ranging und beschreibt ein optisches Messverfahren, mit dem
Objekte detektiert und deren Entfernungen gemessen werden. Ein Lidar-Sensor besteht prinzipiell
aus einem Sender und einem Empfänger. Als Sender dient eine Laserquelle, die einen oder
mehrere kurze Lichtpulse emittiert. Treffen diese Lichtimpulse auf ein Objekt im Raum, werden
sie reflektiert und treffen zurück auf den Empfänger. Die radiale Entfernung des Objekts wird
dann mit der Time of Flight-Messung ermittelt, welche bei Fahrzeugen am häufigsten verwendet
wird. Dazu wird die Zeitdifferenz zwischen dem Senden eines Lichtimpulses bis zum Empfang
dessen Reflexion gemessen. Die Entfernung wird dann mit r = 0, 5 · ct bestimmt, wobei r die
Entfernung in Metern, c die Lichtgeschwindigkeit und t die Zeit in Sekunden beschreibt.12a Der
Lidar verwendet Wellenlängen des ultravioletten-, infraroten- und sichtbaren Lichtspektrums,
wobei in der automobilen Anwendung Wellenlängen von 850 µm bis 1 µm eingesetzt werden.12b
Performance von Lidarsensoren
Die Performance eines Lidar-Sensors hängt hauptsächlich mit der Intensität des ausgesendeten
Lichtpulses, der Empfindlichkeit des Empfängers, atmosphärischen Störungen und den Reflexi-
onseigenschaften des Objekts zusammen.12b
Da in Fahrzeugen grundsätzlich nur Laser der Laserschutzklasse 1 verbaut werden, ist die Leistung
der verbauten Laserquellen stark begrenzt.13a Demnach beschränken sich die Möglichkeiten der
11
Winner, H.: Radarsensorik (2015). a: S. 267 u. 270; b: S. 277 f
12
Gotzig, H.; Geduld, G. O.: LIDAR-Sensorik (2015). a: S.318; b: S. 319 ff
13
Gotzig, H.; Geduld, G. O.: LIDAR-Sensorik (2015). a: S.328; b: S. 318; c: S. 319 ff; d: S. 323f
2. Theoretische Grundlagen 7Leistungssteigerung auf den Empfänger. Das Integral des Lichtpulses entspricht der emittierten
Energie, deshalb ist es von Vorteil, die Lichtpulse kurz zu halten. Die entsprechende empfangene
Impulsantwort eines festen Objekts entspricht der Form einer Gaußkurve.13b Eine wichtige Eigen-
schaft heutiger Lidar-Sensoren ist die Mehrzielfähigkeit (vgl. Abbildung 2-3). Diese beschreibt die
Fähigkeit, mehrere Objekte in einem Messkanal zu erfassen und zu unterscheiden, dadurch wird
es möglich, atmosphärische Störungen wie beispielsweise Nebel von dahinter liegenden Objekten
zu unterscheiden. Um dies zu veranschaulichen, wird die Impulsantwort auf der rechten Seite
mit der aus der linken in Abbildung 2-3 verglichen. Wird der Lichtpuls in den verschiedenen
Tiefen des Nebels reflektiert, überlagern sich die einzelnen reflektierten Impulse und es entsteht
eine ausgedehnte Impulsantwort. Somit lassen sich feste Objekte von weichen Objekten wie
Nebel unterscheiden. Ebenfalls ist in Abbildung 2-3 die Schwelle zu erkennen, die festlegt, welche
empfangenen Impulse als Objekt erkannt werden und welche nicht. Diese Schwelle passt sich
dynamisch den Umgebungseigenschaften an und gewährleistet so eine ausreichende Empfindlich-
keit des Empfängers.13c Ferner ist zu beachten, dass der Lidar ein aktives Messverfahren ist und
die Strecke Sensor-Objekt zweimal durchläuft. Demzufolge ist der Einfluss der Atmosphäre auf
den Lidar größer als auf ein passives Verfahren wie beispielsweise die Kamera.13d
Lr Lr
t t
Abbildung 2-3: Links: Pulsantwort zweier Objekte. Rechts: Pulsantwort weiches Objekt (Nebel). Lr steht für die
empfangene Lichtleistung. .14
Die Leistung des Sensors wird des Weiteren auch durch die Reflexionseigenschaften des Objekts
beeinflusst. Objekte wie Fahrzeuge reflektieren ähnlich einem Lambert-Reflektor, was bedeutet,
dass diese ihre Energie nicht gerichtet, sondern inhomogen und diffus in den halben Raumwinkel
strahlen. Aus diesem Grund beträgt der Anteil der reflektierten Energie, die den Empfänger
erreicht, weniger als 20 %.13d
Für den Fall, dass das Objekt größer als die Strahlauftrittsfläche des Laserstrahls ist, wird die nach
einer Reflexion empfange Lichtintensität Pr mit folgender Formel berechnet:15
KK · Zt · H · T 2 · Pt
Pr = (2-5)
(π)2 · r3 · (Qv /4) · (ρ/2)2
14
Überarbeitete Darstellung nach Gotzig, H.; Geduld, G. O.: LIDAR-Sensorik (2015), S. 319 f, Abb. 18.4 u. Abb. 18.5.
15
Gotzig, H.; Geduld, G. O.: LIDAR-Sensorik (2015), S. 320.
2. Theoretische Grundlagen 8Die Formel wird definiert durch die Intensität des empfangenen Signals Pr , der Reflektanz des
gemessenen Objekts KK, der Empfangslinsenfläche Zt , der Objektbreite H, der Transmission der
Atmosphäre T , der gesendeten Laserleistung Pt , der Entfernung r, der vertikalen Strahldivergenz
Qv und dem Winkel der Objektreflexion ρ.15
In dieser Arbeit verwendeten Lidarsensoren
Der erste in dieser Arbeit verwendete Lidarsensor ist der Velodyne VLP32-C, welcher ein hori-
zontales FoV von 360° und ein vertikales FoV von 40° besitzt. Der horizontale Winkel wird im
Folgenden als Azimutwinkel α und der vertikale Winkel als Elevationswinkel β bezeichnet. Der
Velodyne hat 32 Detektionsebenen, die keine äquidistanten Elevationswinkel besitzen. Anders
als vom Hersteller wird hier der Winkel von −25° als die unterste Detektionsebene und der von
15° als die oberste bezeichnet. Die vollständige Zuordnung der Elevationswinkel zu den Ebenen
findet sich in Tabelle 6-1 im Anhang. Durch diese Aufteilung in den Ebenen ist die Auflösung
des Elevationswinkels gegeben, wohingegen die Auflösung des Azimutwinkels 0,1° bis 0,4° be-
trägt. Die Genauigkeit des Sensors ist mit ± 5 cm bis 50 m Entfernung und ± 10 cm darüber
angegben.16a Der Sensor ist als einziger so auf dem Messfahrzeug montiert, dass die y-Achse des
Sensorkoordinatensystems in Fahrtrichtung des Messfahrzeuges zeigt, wohingegen die anderen
Sensoren mit der x-Achse in beziehungsweise entgegen der Fahrtrichtung zeigen. Weiterhin ist
der Azimutwinkel 0° durch die y-Achse definiert und wird von 180° bis −180° gemessen, wobei
aus Sicht der y-Achse die rechte Hälfte positiv und die linke Hälfte negativ zu zählen ist.
Die vom Velodyne gemessene Intensität der Detektionen ist wie folgend definiert: Der Intensität
wird ein relativer Wert von 0 bis 255 zugeordnet, wobei der Bereich von 0 bis 100 einen diffusen
Reflektor und ein Wert von 101 bis 255 einen Retroreflektor beschreibt. Für diffuse Reflektoren
ist somit ein Wert des Reflexionsgrads von 0 bis 100 % gegeben. Im Wertebereich von 101 bis
255 steht der maximale Wert für einen perfekten Retroreflektor und Werte darunter für einen
beeinträchtigten Retroreflektor.16b
Neben dem Velodyne werden zudem zwei Ibeo Lux des Herstellers Ibeo Automotive Systems GmbH
eingesetzt. Der Ibeo verfügt über ein horizontales FoV von 110° und vier übereinander liegende
Detektionsebenen von −1,6° bis 1,6°. Weiterhin liegt die Entfernungsauflösung bei 4 cm und die
Wiederholungsgenauigkeit bei 10 cm. Auch die gemessene Intensität des Ibeo ist ein relativer
Wert, der in diesem Fall von der Weite des empfangenen Signals abhängt (Echopulsweite).17
2.1.4 Wettersensorik
Dieses Kapitel behandelt die verwendete Wettersensorik. Die von der Wettersensorik gemessenen
Parameter dienen dazu, die gegenwärtigen Wetterbedingungen zu erfassen und zu quantifizieren.
Der Climasensor des Herstellers Adolf Thies GmbH & Co. KG erfasst die Parameter Windgeschwin-
digkeit, Niederschlag, Temperatur, Windrichtung, Helligkeit, Feuchte und Druck, wobei die ersten
drei in dieser Arbeit genutzt werden. Die Windgeschwindigkeit wird mit einer Genauigkeit von
± 0,3 m/s für unter 5 m/s und ± 3 % vom Messwert bestimmt. Für die Niederschlagsintensität
16
Velodyne LiDAR: VLP-32 User Manual (2017). a: S. 95 f; b: S. 33
17
Ibeo Automotive Systems GmbH: Operating Manual ibeo LUX 2010® Laserscanner (2010), S. 84 u. S. 20.
2. Theoretische Grundlagen 9besteht eine Abweichung von bis zu 30 %.18 Die Genauigkeit der Temperaturmessung beträgt ±
0,3 K bei 25 °C und ± 0,5 K im Bereich von -45 bis 60 °C.19
Der zweite eingesetzte Wettersensor ist der Strassenwetter-Sensor des Herstellers G. Lufft Mess-
und Regeltechnik GmbH. Dieser misst zum einen die Wasserfilmhöhe in einem Bereich von 0 bis
6000 µm mit einer Auflösung von 1 µm und der Genauigkeit von 10 %, zum anderen wird die
Straßenoberflächentemperatur mit einer Genauigkeit von ± 0,8 °C bei 0 °C erfasst.20
Die von beiden Sensoren erfassten Parameter werden in dieser Arbeit als Wetterparameter be-
zeichnet.
2.2 Kategorisierung von Umweltphänomenen
Auf die beschriebene Sensorik nehmen verschiedene Umweltphänomene Einfluss. Für eine gezielte
Untersuchung der Auswirkungen von Umweltphänomenen ist es notwendig, die Vielzahl dieser
voneinander abzugrenzen und Zusammenhänge der Phänomene untereinander zu erkennen.
Deshalb erfolgen in den folgenden Abschnitten eine Kategorisierung und Beschreibung der
relevanten Phänomene sowie die Herleitung von Zusammenhängen.
Der Ansatz zur Kategorisierung des Wetters besteht in der Skizzierung der Umweltphänomene
in Szenarien. Im Kontext dieser Arbeit ist diese Vorgehensweise von Vorteil, da das Definieren
und Sammeln von verschiedenen Szenarien ein wichtiger Bestandteil des szenario-basierten
Testens von automatisierten Fahrfunktionen ist.21 Somit besteht die Möglichkeit, die Ergebnisse
der Kategorisierung auch dazu zu verwenden, Umweltphänomene in Szenarien einzubinden.
Die Szenarien werden anschließend genutzt, um eine reale Fahrsituation zu simulieren.21 Nach
Sauerbier et al.21 wird ein Szenario durch eine zeitliche Abfolge von Szenen definiert, diese
wiederum beschreiben eine Momentaufnahme der Umgebung.21 Eine Möglichkeit, Szenarien
systematisch zu beschreiben, ist das sogenannte 6-Ebenen-Modell.
2.2.1 Das 6-Ebenen-Modell
Unter Anwendung des 6-Ebenen-Modells wird ein Szenario durch sechs unterschiedliche Ebenen
definiert, die alle bisher relevanten Aspekte einer realen Fahrsituation abdecken. Die Basis des
Modells ist ein vier Ebenen umfassendes Modell von Schuldt et al.22 , erweitert um eine weitere
Ebene durch Bagschik et al.23a . Abschließend wird die sechste Ebene von Sauerbier et al.21 ergänzt.
Tabelle 2-1 zeigt eine Übersicht der sechs Ebenen.
18
Dieser Wert entstammt einer Rücksprache mit dem Hersteller.
19
Adolf Thies GmbH & Co. KG: CLIMA SENSOR US Bedinungsanleitung (2020), S. 83 f.
20
G. Lufft Mess- und Regeltechnik GmbH: MARWIS - Road Weather Sensor (2020).
21
Sauerbier, J. et al.: Definition of Scenarios for Safety Validation (2019).
22
Schuldt, F. et al.: Effiziente systematische Testgenerierung für Fahrerassistenzsysteme (2013).
23
Bagschik, G., Menzel, T.; Maurer, M.: Ontology based Scene Creation (2018). a: -; b: S. 1817, Abb. 4.
2. Theoretische Grundlagen 10Sie können auch lesen