Messung viskoelastischer Gewebeeigenschaften in vivo
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Messung viskoelastischer Gewebeeigenschaften
in vivo
Master Thesis
zur Erlangung des Grades Master of Science
des Fachbereiches Maschinenbau und Verfahrenstechnik
im Studiengang Biomedical Engineering
der Fachhochschule Furtwangen
vorgelegt von
Dipl. Ing (FH) Heiko Sailer
aus Rottenburg
2001
MasterThesis-Nr.: M_101_S01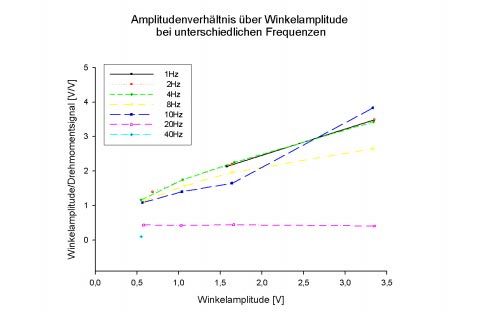
Inhaltsverzeichnis
Inhaltsverzeichnis
1 EINFÜHRUNG ..........................................................................................................1
2 GRUNDLAGEN.........................................................................................................4
2.1 VISKOELASTISCHES VERHALTEN VON BIOMATERIALIEN ......................................4
2.2 MODELLE ZUR BESCHREIBUNG DER VISKOELASTIZITÄT VON BIOGEWEBEN .........5
2.2.1 Maxwell - Modell .........................................................................................5
2.2.2 Voigt - Modell ..............................................................................................9
2.3 KELVIN – VOIGT MODELL (STANDARD KÖRPER) ...............................................11
2.4 DAS „CONSTANT Q“ - MODELL ..........................................................................15
3 EXPERIMENTELLER ANSATZ ZUR ERMITTLUNG DER
VISKOELATISCHEN EIGENSCHAFTEN VON BIOGEWEBE .............................19
3.1 EXPERIMENTELLE BESTIMMUNG DER VISKOELASTISCHEN EIGENSCHAFTEN BEI
HARMONISCHER BELASTUNG ..........................................................................................19
3.2 EXPERIMENTELLE BESTIMMUNG DER VISKOELASTISCHEN EIGENSCHAFTEN BEI
STUFENFÖRMIGER BELASTUNG .......................................................................................20
4 MESSAUFBAU ........................................................................................................21
4.1 DIE ANSTEUERUNGS- UND SIGNALVERSTÄRKUNGSELEKTRONIK ........................21
4.1.1 Signalquellen für RoSA ..............................................................................21
4.1.2 Ansteuerelektronik-Schaltung für RoSA.....................................................22
4.1.3 Schaltung zur Begrenzung der Anstiegsgeschwindigkeit...........................23
4.1.4 Spannungsgesteuerte Stromquelle .............................................................25
4.1.5 Spannungsversorgung ................................................................................26
4.1.6 Signalverstärkung ......................................................................................26
4.1.7 Signal-Rausch-Optimierung.......................................................................27
4.1.8 Justierung des Winkelsensors und Signalwertanpassung ..........................27
4.2 SIGNALERFASSUNG .............................................................................................28
4.2.1 Signalgebung..............................................................................................28
4.3 ANSTEUER-/ MESSERFASSUNGS-SOFTWARE .......................................................29
4.3.1 Messerfassung mittels LabView .................................................................31
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo I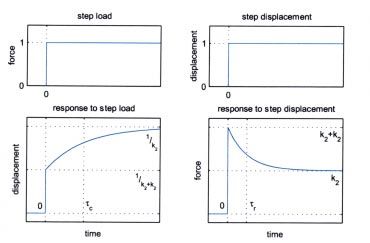
Inhaltsverzeichnis
4.3.2 Signalgebung mittels LabView...................................................................32
4.3.3 Minimierung der Haftreibung durch angepasste Signalgebung................33
4.4 DER MECHANISCHE APPLIKATOR ........................................................................34
4.4.1 Ermittlung eines geeigneten Kopplungselements.......................................34
4.4.2 Der Applikator ...........................................................................................42
5 KALIBRIERUNG ....................................................................................................45
5.1 ERMITTLUNG DER DREHMOMENTENKENNLINIE DES SYSTEMS ............................45
5.2 KORREKTURWERTE FÜR SINUSFÖRMIGE ANREGUNG...........................................47
5.2.1 Ermittlung der Korrekturwerte für das Drehmoment bei sinusförmigem
Signalverlauf ..............................................................................................................48
5.2.2 Phasenkorrektur bei sinusförmigem Drehmoment- und Winkelsignal ......49
5.2.3 Korrekturberechnung des Mess-Signals mittels der ermittelten
Korrekturwerte...........................................................................................................50
5.3 FEHLERABSCHÄTZUNG ........................................................................................51
5.4 KALIBRIERUNG DES ROSA-APPLIKATORS MITTELS VISKOSIMETER (PHYSIKA
MC 20) ...........................................................................................................................53
6 DATENERHEBUNG MITTELS EXPERIMENTELLER CHIRURGIE AM
SCHWEIN ........................................................................................................................55
6.1 POSITIONIERUNG UND FIXIERUNG VON APPLIKATOR UND GEWEBE ....................55
6.2 DATENERHEBUNG ...............................................................................................57
6.3 KURZE ANATOMISCHE / HISTOLOGISCHE VORBETRACHTUNGEN UND
ANMERKUNGEN ZU DEN MESSUNGEN .............................................................................58
6.3.1 Niere...........................................................................................................58
6.3.2 Leber ..........................................................................................................58
6.3.3 Milz.............................................................................................................59
7 MESSERGEBNISSE ...............................................................................................60
8 DISKUSSION ...........................................................................................................64
9 ZUSAMMENFASSUNG UND AUSBLICK..........................................................72
10 ANHANG ..............................................................................................................74
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo II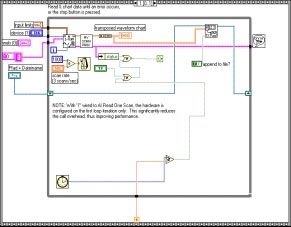
Inhaltsverzeichnis
10.1 GRUNDLAGEN .....................................................................................................74
10.1.1 Spannung....................................................................................................74
10.1.2 Dehnung .....................................................................................................74
10.1.3 Materialgleichungen / Elastische und viskose Deformation......................75
10.1.4 Elastische Deformation..............................................................................76
10.1.5 Viskose Deformation ..................................................................................77
10.2 MESSAUFBAU ......................................................................................................79
10.2.1 Anschlussplan Spannungsversorgung........................................................79
10.2.2 Anschlusspaln Spannungsanstiegsbegrenzung und spannungsgesteuerte
Stromquelle ................................................................................................................80
10.2.3 Anschlussplan: Nullstellung / Signalverstärkung ......................................81
10.2.4 Anschlußpaln DAC.....................................................................................82
10.2.5 Bauteile-Liste .............................................................................................83
10.3 QUELLKODE DER SOFTWARE...............................................................................85
10.3.1 Quellcode Hauptprogramm .......................................................................85
10.3.2 Quellcode Datenaufnahme.........................................................................85
10.3.3 Quellcode Signalgebung ............................................................................87
10.3.4 Bildung des Signalarrays ...........................................................................88
11 LITERATURVERZEICHNIS ............................................................................74
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo III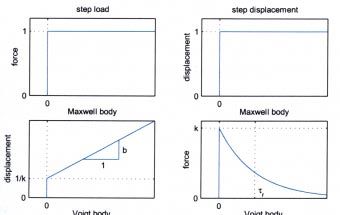
Abbildungsverzeichnis
Abbildungsverzeichnis
Abbildung 1: Hystereseverhalten von „anterior cruciate ligament specimen“ bei
zyklischer Belastung []. 4
Abbildung 2: Schematischer Aufbau des Maxwell - Models 5
Abbildung 3: Systemantwort des Maxwell - Modells auf stufenförmiger Änderung
der Kraft bzw. Deformation [] 8
Abbildung 4: Schematischer Aufbau des Voigt - Modells 9
Abbildung 5: Impulsantwort des Voigt – Modells [14] 10
Abbildung 6: Schematischer Aufbau des Kelvin – Voigt Modells 11
Abbildung 7: Impulsantwort des Kelvin-Voigt-Modells [12] 13
Abbildung 8: Bode-Diagramm des Kelvin-Voigt-Modell [14] 14
Abbildung 9: Prinzipieller Aufbau der Ansteuerelektronik 22
Abbildung 10: Schaltung zur Anstiegsgeschwindigkeitsbegrenzung 23
Abbildung 11: Optimierung des Schwingungsverhaltens durch Begrenzung der
Ausgangsspannung des OV1 24
Abbildung 12: Spannungsgesteuerte Stromquelle 25
Abbildung 13: Signalverstärkung 26
Abbildung 14: Funktioneller Zusammenhang zwischen Ausgangsspannung und
digitalem Ansteuerungswert des Drehmoments. 28
Abbildung 15: Programmstruktur a) Signalgebung b)Messerfassung 29
Abbildung 16: Eingangs-Panel 30
Abbildung 17: Hauptprogramm-Quellkode 30
Abbildung 18: Front-Panel der Signalerfassung und Quellcode 31
Abbildung 19 Bildung (a) und Einbindung des Signalarrays (b) 32
Abbildung 20: Anregungssignalform zur Ermittlung der viskoelatischen
Gewebeeigenschaften. Aufgetragen ist hier der digitale Zahlenwert der
Spannungen über die Samplingrate. 33
Abbildung 21: Kopplungselemente: a) Nadel b) Haifisch-Haut c) Sandpapier d)
gestoßene Metalloberfläche e) Bürste 37
Abbildung 22: Versuchsskizze zur Ermittlung des Reibwertes zwischen
Kopplungselement und Biogewebe 38
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo IV
Abbildungsverzeichnis
Abbildung 23: Experimentdurchführung zur Ermittlung eines geeigneten
Kopplungselements 39
Abbildung 24: Ermittelte Haftreibungswerte auf Muskelgewebe 40
Abbildung 25: Das Kopplungselement Nadeln a) Frontansicht b) Draufsicht 42
Abbildung 26: Kopplungselement mit (Begrenzungs-) Ring 42
Abbildung 27: Prinzipeller Aufbau des Rotations-Scher-Applikators 43
Abbildung 28: Explosionsdarstellung des Applikators 43
Abbildung 29: Versuchsaufbau zur Ermittlung der Drehmomentenkennlinie 46
Abbildung 30: Drehmoment-Kennlinie des RoSA Applikators 46
Abbildung 31: Drehmoment-Korrekturwerte bei verschiedenen Frequenzen über
die Winkelamplitude bei sinusförmigen Drehmoment-Signal 48
Abbildung 32: Phasendifferenz bei sinusförmigen Drehmoment- und Winkelsignal
49
Abbildung 33: a) Messprobe zur Bestimmung der Viskosität mittels dem Vergleichs-
Viskosimeter Physika MC-20 und dem RoSA-Applikator 53
Abbildung 34: Vergleich der Ergebnisse des Viskosimeters Physika MC 20 und des
RoSA-Systems 54
Abbildung 35: RoSA-Messsystems mit Fixierhilfe (Martin-Arm) des Applikators 55
Abbildung 36: Organ- und Applikatorfixierung im Tierversuch 57
Abbildung 37: Anatomischer Aufbau der Niere []. A Capsula fibrosa B Cortex C,D
Medulla 58
Abbildung 38: Darstellung des Baues der Milz [22]. a Milzkapsel, b Trabekel, c rote
Milzpulpa, d Hilus, e Milzarterie, f Balkenarterie, g Pulpaarterie, h
Pinselarteriolen, i Hülsenkapillaren, k arterielle Endkapillaren, l Milzsinus, m
Pulpavene 59
Abbildung 39: Ermittelte Q-Werte für Leber, Niere, Milz und Bauchmuskelgewebe
über die Mess-Frequenz 64
Abbildung 40: Finite Elemente Auswertung zur Berechnung des Schermoduls mit
dem RoSA-Applikator; Farbige Linien sind Linien gleicher
Winkelauslenkungen. 65
Abbildung 41: Räumliche Darstellung der Winkelamplitude für den RoSA-
Applikator 65
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo VAbbildungsverzeichnis
Abbildung 42: Ermittelte Schermodule über der Mess-Frequenz für Leber, Milz,
Niere und Bauchmuskel 66
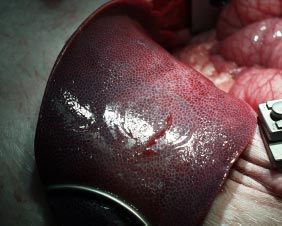
Abbildung 43: Abbildung von Lebergewebe nach einer RoSA - Messung. 68
Abbildung 44: Zeitantwort einer Schweineleber und die Fitkurve auf Basis des
Constant Q – Modells. Die Frequenz des Drehmomentensignals betrug 0,1 Hz.
69
Abbildung 45: Schubdeformation an einem Volumenkörper 75
Abbildung 46: Abhängigkeit der Schubspannung von der Deformation bei
elastischem Verhalten des Körpers. Hookesches Gesetz 76
Abbildung 47: Newtonsches und nicht Newtonsches Verhalten von Flüssigkeiten und
Stoffen 78
Abbildung 48: Quellcode Hauptprogramm 85
Abbildung 49: Quellcode Datenaufnahme 86
Abbildung 50: Hautprogramm Signalgebung 87
Abbildung 51: Startprozedur für Unterprogramm Signalgebung 87
Abbildung 52: Endprozedur für Unterprogramm Signalgebung 88
Abbildung 53: Erstellungscode für Siganlarray 88
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo VITabellenverzeichnis
Tabellenverzeichnis
Tabelle 1: Standardabweichung des Phasenwinkels in Abhängigkeit der
Winkelamplitude 51
Tabelle 2: Standardabweichung des Phasenwinkels in Abhängigkeit der Frequenz
bei 20° und 5° Winkelamplituden 51
Tabelle 3: RoSA Messergebnisse für Leber 60
Tabelle 4: RoSA Ergebnisse für die Niere des Schweins 60
Tabelle 5: RoSA-Messergebnisse für Bauchmuskelgewebe 61
Tabelle 6: RoSA-Messergebnisse Milz 61
Tabelle 7: Ermittelter Schermodul für die Leber in und ex vivo 62
Tabelle 8: Ermittelter Schermodul für die Niere in und ex vivo 63
Tabelle 9: Ermittelter Schermodul des Muskelgewebes bei Schweinen in vivo 63
Tabelle 10: Ermittelter Schermodul für die Milz in vivo 63
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo VIIKapitel 1 Einführung 1 Einführung Seit der ersten Minimal-Invasiven Cholezystektomie im Jahre 1870 wurden die Indikationen für den Einsatz der Minimal-Invasiven Chirurgie (MIC) schrittweise erweitert. Das Einsatzgebiet der Minimal-Invasiven Chirurgie wird immer noch systematisch erweitert und hat hierbei in den vergangenen Jahren weite Bereiche der chirurgischen Fachrichtungen beeinflusst. Heute reicht das Indikationsspektrum von der klassischen Cholezystektomie über Tubensterilisation in der Gynäkologie bis zur Fundoplikatio. Weitere Anwendungsfelder finden sich in der Augenchirurgie, sowie in der Herzchirurgie. Das Einsatzgebiet in der Augenheilkunde reicht vom Implantieren einer Kunstlinse beim grauen Star bis zur Wiederanlegung abgelöster Netzhaut(-Teile)[1,2]. Die intensive Erweiterung des Indikationsbereichs liegt begründet in den Vorteilen für den Patienten. Zu nennen ist hier das geringere operationsbedingte Trauma, welches durch den Minimal Invasiven Zugang über „kleine“ Trokareinstiche möglich geworden ist. Demzufolge ist der Blutverlust und das Infektionsrisiko geringer. Des weiteren werden hierbei auch die postoperativen Schmerzen nach einer Operation vermindert. Die Folgen sind kürzere Liegezeiten im Krankenhaus wie auch kürzere Rehabilitationszeiten. Auch die hierbei resultierende Kostenreduzierung ist ein nicht zu vernachlässigender Aspekt gegenüber der konventionellen Operationstechnik [3]. Dem stehen aber die kostenintensive technische Operations-Ausstattung (Videoendoskopietechnik, Instrumente der MIC, CO2-Insufflator usw.) sowie der hohe Ausbildungs- und Trainingsbedarf für Ärzte und Operationspersonal gegenüber. Die Einführung und die Weiterbildung der Chirurgen in die Technik der Minimal - Invasiven Chirurgie stellt eine besondere Herausforderung dar. Obwohl es sich nicht um prinzipielle Änderungen des Operationszieles, sondern nur um Änderungen des operativen Zuganges handelt, ist die Methode, im Gegensatz zur offenen Chirurgie, mit einer in den Grundlagen geänderten Operationstechnik und Taktik verbunden. Sie weist eine Reihe von speziellen, bisher unbekannten Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 1
Kapitel 1 Einführung
Anforderungen auf. Zu nennen ist hier der Verlust des direkten Kontakts mit dem
Operationsgebiet, d. h. das Arbeiten mit Videokamera und Monitor, wie das
neuartige Instrumentarium und dessen Einsatz mit reduzierten Freiheitsgraden.
Auch der Verzicht auf den Tastsinn und des dreidimensionalen Sehens sind
wichtige Unterschiede zur herkömmlichen Chirurgie. Weitere Differenzen sind die
eingeschränkten räumlichen Verhältnisse, reziproken Bewegungsabläufe, neue
Präparations- und Hilfstechniken und ein modifiziertes Krisenmanagement. Eine
solche Fülle komplexer Änderungen kann selbstverständlich nicht ohne
intensives Traniee-Programm erlernt werden. Zur Zeit umfasst z. B. die
Weiterbildung in der laparoskopischen Operationstechnik eine theoretische
Unterweisung, Manipulationen am Phantom, Präparierübungen an isolierten
Tierorganen, Assistenzen bei Operationen und zum Abschluss selbständige
Operationen unter Assistenz eines erfahrenen laparoskopischen Chirurgen. Ziel
neuester Trainingskonzepte ist die Integration von computerunterstützten
Simulationsprogrammen, sog. Virtuelle Realitäts (VR)- Simulationsprogramme.
Die Anwendungen der VR-Technik ist in der Medizin ein Bereich von großem
wissenschaftlichen Interesses. Mögliche Anwendungsfelder dieser Technik sind
Eingriffsplanungen von Operationen am virtuellen Patienten,
Operationssimulationen, die Aus- und Weiterbildung wie auch die Evaluation
„virtueller Instrumentenprototypen“ und Erprobung neuer Operationsverfahren.
Da in der Minimal-Invasiven Chirurgie der Umgang mit Monitoren und
technologischen neuartigen Techniken und Instrumenten nichts ungewöhnliches
ist, sollte daher eine breite Akzeptanz für VR-Simulationen zu erwarten sein. Die
Vorteile der VR-Simulation sind u. a.
- die theoretisch unbegrenzte Möglichkeit der Erweiterbarkeit
- die Möglichkeit des zeitlich uneingeschränkten Trainings
- der Wiederholbarkeit sowie
- die a priori unbegrenzten Simulationsmöglichkeiten.
Hierfür sollten die VR-Simulationen folgende Eigenschaften aufweisen:
- korrekte geometrische Anatomie
- korrektes physikalisches dynamisches Verhalten
- korrektes physiologisches Verhalten
- Kraftrückführung
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 2Kapitel 1 Einführung Ein wesentlicher Schwachpunkt aller derzeit verfügbaren VR-Systemen ist die mangelnde realitätsnahe Modellierung biomechanischer Gewebeeigenschaften des menschlichen Körpers. Ein Grund hierfür ist die Schwierigkeit, mechanische Eigenschaften von Weichteilgewebe in vivo korrekt zu messen. Die bisherigen Untersuchungen von (Bio-)Geweben, hinsichtlich ihrer biomechanischen Eigenschaften, wurden bis vor kurzem hauptsächlich in vitro bestimmt. Hierbei kamen Verfahren wie Zug- oder Druckmessungen sowie Untersuchungen mit unterschiedlichen Viskosimetern [4] zum Einsatz. Erst in neuester Zeit wurde im Hinblick auf realitätsnahe Gewebemodelle für VR- Simulationen versucht, die mechanischen Eigenschaften von (Bio-) Geweben in vivo zu bestimmen. Hierbei kommen Verfahren zum Einsatz, die auf Gewebe- deformationsänderungen bei induziertem Unterdruck [5] oder auf Messung der Kraftantwort des Gewebes bei mechanischer (Druck-) Belastung [6,7] basieren. Da mechanische Belastungen stark zeitabhängige Reaktionen bei Weichteilgeweben hervorrufen (Kriechprozesse, Umverteilungsprozesse von intra- und extrazellulärer Flüssigkeiten), konnte man bisher bei Messmethoden, bei denen der Messzeitpunkt willkürlich festgelegt wurde [8], keine exakten Gewebeparameter (Elastizitäts-, Schermodul, Viskosität (siehe Anhang Grundlagen)) bestimmt werden. Begründet ist dies durch die Nichtquantifizierbarkeit der genannten Störeinflüsse. Um diese Problematik zu umgehen, wird in der vorliegenden Arbeit eine Versuchsanordnung auf Basis einer definierten, zeitabhängigen Rotations-Scher- Messung entwickelt. Zentraler Bestandteil dieser Versuchsanordnung ist ein Rotations-Scher-Applikator (RoSA). Mit Hilfe des RoSA-Applikators sollen die viskoelastischen Eigenschaften von ausgewählten Weichteilgeweben ermittelt werden. Die aus den Messdaten bestimmbaren Gewebeparameter ermöglichen das Erstellen von Materialgleichungen (Kriechfunktion Relaxationsfunktion) des untersuchten (Bio-)Gewebes. Diese Gleichungen bilden die Basis der Simulationsdarstellung des jeweiligen Biogewebes in VR-Simulationen. Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 3
Kapitel 2: Grundlagen
2 Grundlagen
2.1 Viskoelastisches Verhalten von Biomaterialien
Bei Betrachtung von Biomaterialien unter mechanischer Belastung stellt man fest,
dass rein elastisches bzw. rein viskoses Verhalten nicht vorkommt.
Wird die Kraftantwort eines biologischen Materials betrachtet, welches einer
stufenförmigen Deformation ausgesetzt ist, so stellt man fest, dass die im Körper
entstehende Kraft zeitabhängiges Verhalten aufweist. Dieses Phänomen
bezeichnet man als Relaxation.
Belastet man das Material andererseits mit einer stufenförmigen Kraft, so ist eine
zeitabhängige Verformung des Materialkörpers zu beobachten. Diese
Verformungsreaktion, welche abhängig ist von der Materialeigenschaft und
Größe der einwirkenden Kraft, wird Kriechen genannt.
Belastet man ein Material nun zyklisch, so wird bei Betrachtung des Spannungs-
Dehnungs-Diagramms einen Unterschied zwischen Belastungsfall und
Entlastungsfall zu beobachten sein. Diese Eigenschaft wird als Hysterese
bezeichnet.
Alle drei Eigenschaften (Relaxation, Kriechen und Hysterese) wird unter dem
Begriff Viskoelastizität zusammengefasst [4].
Kraft F
Deformation x
Abbildung 1: Hystereseverhalten von „anterior cruciate ligament specimen“
bei zyklischer Belastung [9].
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 4Kapitel 2: Grundlagen
2.2 Modelle zur Beschreibung der Viskoelastizität von Biogeweben
Zur Beschreibung der oben genannten (Gewebe-) Eigenschaften, Elastizität und
Viskosität, werden mechanische Modelle verwendet. Dabei wird die Elastizität
durch eine lineare Feder und die Viskosität durch ein Dämpfungselement
beschrieben.
Für die lineare Feder gilt F = k 1 * s , wobei s die Auslenkung der Feder darstellt.
Der ideale Dämpfer wird durch die Gleichung F = k 2 * s& charakterisiert. Das
ideale Dämpfungselement wird als eindimensionales Modell der Newtonschen
Flüssigkeit mit F = η * s& beschrieben. Beim Übergang der oben aufgeführten
Gleichungen zu den entsprechenden Materialgleichungen wird aus k 1 = E , k 2 =
η und s = γ .
2.2.1 Maxwell - Modell
Durch Serienschaltung einer (Hookeschen-) Feder und einem idealen
Dämpfungselement erhält man den nach Maxwell benannten Modellkörper, der
sowohl Elastizitäts- als auch Viskositätsanteile aufweist. Das Verhalten ist eine
Kombination von Hookeschem Körper und Newtonscher Flüssigkeit.
Flüssigkeiten die solche Eigenschaften aufweisen, werden als „viskoelastische
Flüssigkeiten“ bezeichnet.
s s&
Abbildung 2: Schematischer Aufbau des Maxwell - Models
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 5Kapitel 2: Grundlagen
Wie aus Abbildung 2 ersichtlich ist, besteht die Deformation, unter der
durchgeleiteten Kraft F, aus zwei Bestandteilen:
F
a) Deformation der Feder, welche sich aus dem Hookeschen Gesetz mit s 1 =
k1
errechnet und
F
b) Viskoelastische Antwort des Dämpfungselements, welche sich durch s&2 =
k2
beschreiben lässt.
Wird nun die Deformationsgeschwindigkeit bestimmt, so ergibt sich aus der
Summe der beiden Reaktionsanteilen folgende Gleichung:
F& F F& F
s& = + = + Gl. 1
k1 k 2 µ η
Betrachtet man nun Gleichung 1, so ist zu erkennen, dass bei einer plötzlichen
F ( 0)
Krafteinwirkung bei (t=0) nur die Feder reagiert, s = , und (noch) keine
k1
Auslenkung des Dämpfungselements statt gefunden hat. Aus diesem Verhalten
ist ableitbar, dass beim Maxwell-Modell bei großer Deformationsgeschwindigkeit
der viskose Anteil annähernd zu Null tendiert und nur noch der elastische Anteil
vorherrscht.
Die Kriechfunktion s(t) erhält man als Lösung dieser zeitlichen
Differentialgleichung erster Ordnung (Gl.1), wenn die Kraft, F=1 zur Zeit t=0,
sprungförmig aufgebracht wird.
Für die Kriechfunktion [10] ergibt sich folgender Zusammenhang: Dabei gilt
dH
F(t) = Stufenfunktion H(t), mit H(t) = 1 bei t > 0, H(t)=0 bei t < 0 und = δ (t )
dt
1 1
s (t ) =
µ ∫ δ (t )dt + ∫ H (t )dt
η
1 µ
s (t ) = 1 + t H (t )
µ η Gl. 2
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 6Kapitel 2: Grundlagen
Überträgt man die Gleichung 1 in die Konvention der Materialgleichungen, so
resultiert bei der Betrachtung einer kleinen Deformation dγ , während der Zeit dt ,
mit Hilfe der Gleichungen für die elastische und viskose Deformation (s. Anhang
Grundlagen Gl. 25 & 26), folgenden Zusammenhang:
∂τ τ
dγ = + dt Gl. 3
G η
G wird als Schubmodul bezeichnet( s. Anhang Grundlagen).
Wird Gl. 3 nach der Zeit abgeleitet und nach τ umgestellt, so erhält man
η dτ
τ = ηγ& −
G dt Gl. 4
Anhand von Gl. 4 können folgende zwei Grenzfälle betrachten werden:
a) Die Flüssigkeit ist völlig unelastisch, d.h. G ⇒ ∞ ; dann wird der elastische
τ
Anteil in der Gleichung zu Null und somit gilt γ& = . Dies entspricht dem
η
Newtonschen Viskositätsgesetz .
b) Die Viskosität η geht gegen Unendlich; d.h. es liegt ein starrer Körper vor.
Ist der viskose Anteil der Maxwellschen Gleichung (Gl.2) Null, so erhält man das
Hooksche Gesetz.
Aus den oben abgeleiteten Zusammenhängen ist zu ersehen, dass bei konstant
wirkender Spannung die Deformation mit konstanter Geschwindigkeit wächst.
Wird dagegen der Körper zunächst durch die Spannung τ 0 belastet und
anschließend die Deformation konstant gehalten, t = 0 : τ = τ 0 ; t > 0 : γ& = 0 , so
resultiert daraus
G dτ
τ =− = −τ& Gl. 5
η dt
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 7Kapitel 2: Grundlagen
G
Definiert man nun := T Re lax als die Relaxationszeit (Abklinkonstante der
η
τ
Spannung) [11] der Maxwellschen Gleichung, so folgt τ& + = 0.
T relax
Der Spannungsverlauf des Maxwellschen Modells ergibt sich als Lösung dieser
Gleichung und lautet unter Berücksichtigung der Anfangsbedingungen (s.o.).
t
τ = τ 0 exp − Gl. 6
T relax
Die Relaxationsfunktion F(t) ergibt sich mit s(t) = H(t), s&(t ) = δ (t ) als Greensche
Funktion der Differentialgleichung erster Ordnung [13]
µ
F& + F = cδ (t )
η
zu
µ
−( )t
F (t ) = µ * e η
H (t ) Gl. 7
Abbildung 3 zeigt die Systemantwort eines Maxwell - Modells bei stufenförmiger
Änderung der Kraft und Deformation.
stufenförmige Belastung stufenförmige Deformation
Deformation
Kraft
Maxwell Körper Maxwell Körper
Deformation
Kraft
Abbildung 3: Systemantwort des Maxwell - Modells auf stufenförmiger Änderung
der Kraft bzw. Deformation [12]
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 8Kapitel 2: Grundlagen
2.2.2 Voigt - Modell
Der Voigt - Körper weist, wie auch die Maxwellsche Flüssigkeit (s.o.), sowohl
elastische als auch viskose Deformationsanteile auf. Im Gegensatz zum
Maxwell – Modell werden beim Voigt - Modell das Federelement mit dem
Dämpfungselement parallel zueinander geschaltet (Abbildung 4). Beim Voigt –
Modell werden im Unterschied zum Maxwell – Modell nicht die
Deformationsanteile addiert, sondern die Schubspannungen. So erhält man mit
den beiden Gleichungen 25 und 26 mit γ = s folgenden Zusammenhang:
τ = τ elast . + τViskos = Gs + ηs& Gl. 8
Die resultierende Deformation s bei Einleitung einer Kraft ist bei beiden
Elementen gleich. Die Geschwindigkeit s& und die resultierende Kraft der beiden
ergibt unter Berücksichtigung der nun für den elastischen Fall zu verwendeten
Federkonstante µ folgende Gleichung:
F = µ s + η s& Gl. 9
Abbildung 4: Schematischer Aufbau des Voigt - Modells
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 9Kapitel 2: Grundlagen
Der Voigt Körper wird durch die Zähigkeit η charakterisiert (viskoelastischer
Festkörper). Wie aus Gleichung 9 zu erkennen ist, ergibt sich bei konstanter
Scherung ( s& = 0 ) F = µs . Der Voigt-Körper verhält sich unter diesen
Bedingungen wie ein Hookscher Körper, er relaxiert nicht.
Für die Kriechfunktion ergibt sich mit den Randbedingungen t = 0 ; s = 0 folgender
Zusammenhang [13]:
1
µ
− t
s (t ) = 1 − e η H (t ) Gl. 10
µ
µ
Der Ausdruck = T ret stellt die Retardationszeit der Verschiebung dar.
η
In Abbildung 5 wird das Systemverhalten bei stufenförmiger Belastung und
Deformation des Voigt – Modells dargestellt.
stufenförmige Belastung stufenförmige Deformation
Deformation
Kraft
Voigt Körper Voigt Körper
Deformation
Kraft
Zeit Zeit
Abbildung 5: Impulsantwort des Voigt – Modells [14]
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 10Kapitel 2: Grundlagen
Beide Modelle, Maxwell und Voigt, beschreiben nur annähernd das
viskoelastische Verhalten. Das Maxwell - Modell reagiert bei stufenförmiger
Anregung mit konstantem Kriechverhalten ohne Begrenzung der
Längenänderung s(t). Für die Beschreibung von Festkörpern ist daher das
Maxwell - Modell nicht geeignet. Das Voigt - Modell ist nicht in der Lage,
stufenförmige Deformationen physikalisch sinnvoll zu modellieren.
Um diese Ungenauigkeiten der beiden Modelle zu umgehen, verwendet man
mehrparametrige lineare viskoelastische Modelle.
2.3 Kelvin – Voigt Modell (Standard Körper)
Ein dreiparametrisches Modell ist das Kelvin – Voigt Modell. Gebildet wird das
Kelvin – Voigt Modell durch Parallelschaltung einer Hookeschen Feder mit einer
Newtonschen Flüssigkeit (Abbildung 6).
Abbildung 6: Schematischer Aufbau des Kelvin – Voigt Modells
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 11Kapitel 2: Grundlagen
Für das genauere Betrachten des Verhaltens dieses Modells halten wir folgendes
fest:
Die Gesamtdeformation setzt sich zusammen aus der Deformation der Feder und
des Dämpfers, s = s 1 + s1′ . Die Gesamtkraft F ergibt sich aus der Summe der
Federkraft F0 und der Kraft F1 des Maxwellkörpers, F = F0 + F1 . Mit
F0 = µ 0 * s und F1 = η1 * s&1 = µ1 * s1′ erhält man folgenden Zusammenhang für den
Kraftverlauf
η1 & µ
F+ F = µ 0 s + η1 1 + 0 s&
µ1 µ1 Gl. 11
Diese Gleichung kann in die folgende Form umgeschrieben werden:
F + τ ε F& = µ 0 (s + τ σ s& ) Gl. 12
η1 η1 µ0
mit τ ε = und τ σ = 1 + .
µ1 µ0 µ 1
τ ε ist die Relaxationszeit bei konstanter Dehnung, sie wird auch die
„Retardationszeit“ der Verschiebung genannt. Die elastische Deformation wird
erst nach langer Zeit erreicht, daher spricht man von verzögerter Elastizität.
τ σ stellt die Relaxationszeit bei konstanter Spannung dar.
Für die Kriechfunktion gilt folgender funktioneller Zusammenhang [14]:
τ t
−τ σ
s(t ) = µ 0 1 − 1 − ε e H (t )
τσ Gl. 13
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 12Kapitel 2: Grundlagen
stufenförmige Belastung stufenförmige Deformation
Deformation
Kraft
Systemantwort auf stufenförmige Belastung Systemantwort auf stufenförmige Deformation
Deformation
Kraft
Zeit Zeit
Abbildung 7: Impulsantwort des Kelvin-Voigt-Modells [12]
Um das Bode-Diagramm des Kelvin - Voigt Körpers zu erstellen, ermittelt man
aus Gleichung 10 die entsprechende Fouriertransformierte:
Durch Umformen von Gleichung 10 folgt
η d µ + µ1 d
+ 1f = µ 0 η1 0 + 1s Gl. 14
µ1 dt µ1 µ 0 dt
Nach anschließender Fourier-Transformation und Bildung des Verhältnisses
S
(s ) erhält man die Gleichung zur Darstellung des Bodediagramms. Das
F
Bodediagramm wird in der Wissenschaft und Technik allgemein verwendet, um
die Frequenzabhängigkeit von Signalen darzustellen. Trägt man dieses
Verhältnis (Compliance) über die Frequenz auf, so erhält man den in Abbildung 8
dargestellten Kurvenverlauf.
S (s ) 1 τ r s +1
= H KelvinVoig t (s ) = Gl. 15
F (s ) µ0 τc s +1
( µ 0 + µ1 )η η
mit τ c = und τ r =
µ 0 µ1 µ1
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 13Kapitel 2: Grundlagen
Compliance
Phase [rad]
Frequenz Frequenz
Abbildung 8: Bode-Diagramm des Kelvin-Voigt-Modell [14]
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 14Kapitel 2: Grundlagen 2.4 Das „Constant Q“ - Modell Die oben vorgestellten Modelle beschreiben die Materialeigenschaften von viskoelastischen Materialien in Abhängigkeit der Frequenz nur sehr ungenau. Ein Lösungsansatz zur besseren Beschreibung der Materialeigenschaften stellt das Constant Q – Modell dar. Erstmals wurde dieses Modell zur Ermittlung der Materialeigenschaften von Gesteinen in der Geophysik durch Einar Kjartansson [15] eingesetzt. Das Constant Q – Modell basiert auf der experimentell ermittelten Tatsache, dass die mechanische Güte Q frequenzunabhängig ist. Mit Hilfe des Constant Q – Modells soll aus den Messdaten die Parameter (mechanische Güte, Schermodul, Viskoelastizität) zur Charakterisierung der (Bio)-Gewebeeigenschaften bestimmt werden. Im folgenden soll in groben Zügen das Constant Q – Modell vorgestellt werden: Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 15
Kapitel 2: Grundlagen
Vorbetrachtung und Definition
4πW
Die mechanische Güte Q ist definiert als Q= , wobei W die
∆W
durchschnittliche gespeicherte Energie und ∆W die Verlustenergie darstellt,
welche während eines sinusförmigen Belastungszyklus auftritt.
1
Des weiteren wird tan δ = definiert, wobei δ die Phasenverschiebung zwischen
Q
Spannungs- und Deformationsverlauf ist.
Für die lineare Beziehung zwischen Spannung und Deformation gelten die
folgenden Beziehungen, welche schon Bolzmann 1876 beschrieben hat.
i) σ (t ) = m (t ) ∗ ε (t ) =Stressfunktion über die Zeit
ii) ε (t ) = s (t ) ∗ σ (t ) =Deformationsfunktion über die Zeit
wobei m(t) und s(t) reelle Funktionen sind und bei tKapitel 2: Grundlagen
Das Constant Q – Modell
Im folgenden soll skizzenhaft dargestellt werden, wie man von der Kriechfunktion
zur Relaxationsfunktion nach E. Kjartansson anhand des Constant Q - Modells
gelangt:
Frequenzunabhängiges Q impliziert, dass der Energieverlust pro Zyklus, bei
sinusförmiger Anregung, unabhängig von der Oszillationsfrequenz ist.
Ein Material welches dieses Verhalten aufweist, besitzt eine Kriechfunktion
welche in einem Doppellogarithmischen dargestellten Diagramm eine Gerade ist,
bzw. folgende Proportionalität aufweist: Ψ (t ) ∝ t b .
Ein geeigneter Lösungsansatz beschriebt Bland [16]. Dabei wird folgender
Ansatz verwendet
2γ
1 t
Ψ (t ) =
M 0 Γ (1 + 2γ ) t 0 für t>0. (Gl. 16)
Für t0, und s(t)=0 für t0 und Ψ (t ) = 0 für tKapitel 2: Grundlagen
Anhand der Phasenverschiebungen zwischen Drehmoment- und Winkelsignal
der RoSA-Mess-Ergebnisse kann mit Hilfe des oben dargestellten Constant Q –
Modell die dazugehörige Kriech und Relaxationsfunktionen der untersuchten
Gewebetypen ermittelt werden.
Dabei gilt für die Phasenverschiebung und der mechanischen Güte folgende
Beziehung:
1 1 1
γ = tan −1 ≈ Gl. 18
π Q πQ
Analysiert man das Verhalten eines Constant Q – Materials, welches sich aus
den oben genannten Gleichungen folgt, so ergibt sich für die Kriechfunktion bei
t → 0 eine Deformation, die für t → ∞ gegen unendlich strebt. Des weiteren
strebt der Spannungswert der Relaxationsfunktion ebenfalls gegen einen
unendlichen Wert. Dieses Grenzverhalten tritt in der Praxis jedoch nicht auf.
Zwischen den Grenzwerten beschreibt jedoch das Constant Q - Modell sehr gut
das Materialverhalten.
Das beschriebene (Material-) Verhalten entspricht dem einer viskoelastischen
Flüssigkeit (s.o.).
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 18Kapitel 3: Ansatz zur Ermittlung der viskoelastischen Gewebeeigenschaften
3 Experimenteller Ansatz zur Ermittlung der
viskoelatischen Eigenschaften von Biogewebe
Um die oben genannten Schwierigkeiten bei der Bestimmung von Bio-
Gewebeeigenschaften in vivo zu vermeiden, werden in dieser Arbeit die
viskoelastischen Gewebeeigenschaften mit Hilfe eines Rotations –
Scher Experiments bestimmt. Im Gegensatz zu den bisherigen Methoden können
hierbei Verfälschungen durch nichtquantifizierbare Flüssigkeits-
Umverteilungsprozesse vernachlässigt werden.
3.1 Experimentelle Bestimmung der viskoelastischen Eigenschaften
bei harmonischer Belastung
Bei der Bestimmung der viskoelastischen Gewebeeigenschaften mittels
harmonischer Belastung, hier Indikation eines sinusförmigen Drehmoments, sind
die relevanten Messparameter das Drehmoment, die resultierende
Winkelamplitude und die Phasenverschiebung zwischen Drehmoment- und
Winkelsignal. Wie aus Kapitel Grundlagen zu entnehmen ist, lässt sich aus den
Messparametern die mechanische Güte Q und den Schermodul G (siehe
Anhang) bestimmen.
Für die exakte Herleitung der Materialgleichungen (Kriechfunktion,
Relaxationsfunktion) aus den Messdaten, mittels den oben genannten Modellen,
möchte ich auf Y.C. Fung [17] verweisen. Prinzipielle Vorgehensweise ist, dass
man ein Modell findet, welches die Ergebnisse der Messung am besten
beschreibt. Anschließend kann mit Hilfe des Modells die Parameter der
Materialgleichungen bestimmt werden. Beispielhaft soll hier der Lösungsansatz
für das Kelvin – Voigt Modell gezeigt werden [17]: Da Drehmoment und
Winkelfunktion harmonische Funktionen über der Zeit sind, können wir sie auch
in komplexer Schreibweise darstellen. Für den komplexen Modul der Elastizität
G (iω ) gilt nun;
1
1 + ω 2τ σ 2 2
G (iω ) = ER
2
E R = µ0
1 + ω 2
τ ε
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 19Kapitel 3: Ansatz zur Ermittlung der viskoelastischen Gewebeeigenschaften
ω (τ δ − τ ε )
und tan δ =
1 + ω 2 (τ σ τ ε )
Aus den beiden Gleichungen lässt sich nun zur Aufstellung der
Materialgleichungen die Konstanten τ σ und τ ε (siehe Kapitel 2 Grundlagen)
ermitteln.
3.2 Experimentelle Bestimmung der viskoelastischen Eigenschaften
bei stufenförmiger Belastung
Die Ermittlung der mechanischen Güte Q, des Schermoduls und abgeleiteten
Konstanten der Materialgleichungen erfolgt hier mit Hilfe des Constant Q –
Modells. Das Vorgehen ist prinzipiell dem vorhergehenden beschriebenen
Lösungsansatz äquivalent. Anstatt dem Kelvin - Voigt Modell wird für den Fit das
Constant Q – Modell (s.o.) verwendet. Messparameter sind Drehmoment- und
Winkelamplitude über der Zeit t.
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 20Kapitel 4: Messaufbau
4 Messaufbau
Zentraler Bestandteil dieser Versuchsanordnung zur Messung viskoelastischer
Gewebeeigenschaften ist ein sog. Rotations-Scher-Applikator (RoSA). Dieser
Applikator besteht aus einem Drehmagneten, Winkelsensor und einem
Kopplungselement. Durch eine Ansteuerelektronik und Software zur
Signalgebung und Messerfassung wird der Versuchsaufbau komplettiert.
In den folgenden Unterkapiteln werden die technischen Entwicklungen des
RoSA’s - Experiments näher erläutert.
4.1 Die Ansteuerungs- und Signalverstärkungselektronik
4.1.1 Signalquellen für RoSA
Eine der Anforderung an die Elektronik war einerseits die Sicherstellung einer
geeigneten, störungsfreien Signalquelle für den Drehmagneten und andererseits
die Aufbereitung der (Mess-) Signale des Winkelsensors für die Messerfassung.
Zur Signalerzeugung stehen dem RoSA - System folgende Quellen zur
Verfügung:
a) LabView, d.h. softwaregesteuert
b) externer Funktionsgenerator
c) integriertes bipolares Potentiometer
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 21Kapitel 4: Messaufbau
4.1.2 Ansteuerelektronik-Schaltung für RoSA
In Abbildung 9 ist der verwendete prinzipielle Aufbau der Ansteuerungs-
Elektronik dargestellt.
Spannungs-
versorgung
IA
Signalwahl Spannungsanstiegs- Spannungsgesteuerte
Begrenzung Stromquelle
Signal-Quellen
Abbildung 9: Prinzipieller Aufbau der Ansteuerelektronik
Um die Spannungsversorgung der verwendeten Operationsverstärker zu
gewährleisten, wurde hierfür eine Spannungsquelle (+/- 12 V) entworfen und auf
der Elektronikplatine bereitgestellt. Damit Instabilitäten durch zu schnelles
Umschalten der Signalpegel (differenzierendes Verhalten) vermieden werden,
wurde eine dynamische Nichtlinearität zur Begrenzung der
Anstiegsgeschwindigkeit integriert. Die Ansteuerung des Drehmagneten erfolgt
über eine spannungsgesteuerte Stromquelle. Durch das proportionale Verhalten
des Drehmagneten zwischen Drehmoment und Strom ist es möglich, präzise
Scher-Belastungen auf ein Biogewebe auszuüben.
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 22Kapitel 4: Messaufbau
4.1.3 Schaltung zur Begrenzung der Anstiegsgeschwindigkeit
R1 R1
C
Ue
R
+ -
-
OV1 +
OV2 Ua
R1 R1’
Abbildung 10: Schaltung zur Anstiegsgeschwindigkeitsbegrenzung
Funktionsprinzip der Schaltung: Wenn man einen Spannungssprung auf den
Eingang gibt, so geht der Verstärker OV 1 an die Aussteuerungsgrenze Umax.
Dadurch steigt die Ausgangsspannung von OV 2 mit der Geschwindigkeit
dU a U max
= Gl. 19
dt RC
an, bis sie den durch die Über-alles-Gegenkopplung bestimmten Wert –Ue
erreicht. Eine Rechteckspannung wird also in eine Trapezspannung mit
einstellbarer Zeitdauer (RC-Glied) überführt. Da keine Rotationsexperimente über
10 Hz durchgeführt werden, wird die Anstiegssteilheit auf 1 ms pro Volt
festgelegt. Die Dimensionierung des Kondensators und des Widerstands ermittelt
sich aus folgenden Gegebenheiten: Durch die Integration von zwei Z-Dioden
(siehe Abbildung 11), welche parallel zum Widerstand R1’ eingebaut werden, wird
eine Begrenzung der Ausgangsspannung des OV 1 auf 5 V erzwungen. Dies
entspricht ½ Umax. Folglich muss man 1/2*Umax in die Gleichung 16 einsetzen und
erhält für einen Widerstandswert von 1M Ohm eine Kapazität von 500nF. Um
eventuelle Variationen zu ermöglichen, wurde für den Widerstand ein
Potentiometer verwendet. Für die Widerstandsbeschaltung der
Operationsverstärker wurde für R1 = 1M Ohm eingesetzt.
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 23Kapitel 4: Messaufbau
R1’=RSp3 R
Z
CF
Abbildung 11: Optimierung des Schwingungsverhaltens durch Begrenzung der
Ausgangsspannung des OV1
Der Kondensator CF wirkt als Filter für hochfrequente Signalanteile. Diese
Optimierung der Schaltung mittels Ausgangsspannungsbegrenzung des OV 1
und Filterung mittels CF brachte eine deutliche Verbesserung des
Signalverhaltens bezüglich der Schwingungsneigung.
Einen Schaltungs- bzw. Dimensionierungsplan ist im Anhang beigefügt
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 24Kapitel 4: Messaufbau
4.1.4 Spannungsgesteuerte Stromquelle
Abbildung 12 zeigt den Aufbau der verwendeten Stromquelle.
R3
R2 R2 R2 R2 R1 Ia
Ue
- U2
- RL
+
+
OV1 OV2
Abbildung 12: Spannungsgesteuerte Stromquelle
Die Funktionsweise der Stromquelle beruht darauf, dass der Ausgangsstrom über
den Spannungsabfall an R1 gemessen wird. Die Ausgangsspannung des
Operationsverstärkers OV2 steigt so lange an, bis sich die Eingangsspannung
mit der Über-alles-Gegenkopplung kompensiert. Der Eingangsstrom ist
unabhängig vom Lastwiderstand, da der Vorwiderstand R2 virtuell geerdet ist. Der
Ausgangsstrom lässt sich folgendermaßen berechnen [18]:
U 1 R 2 − R 3 − R1
I2 = + U2
R1 R 1R 3
Der maximale Strom ergibt sich aus der angegebenen maximalen Leistung des
Magneten dividiert durch die Spannung. Führt man diese Rechnung durch, so
ermittelt man einen maximalen Strom von 200 mA. Daraus ergeben sich folgende
Widerstandswerte:
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 25Kapitel 4: Messaufbau
R1= 50 Ohm
R2= 100 kOhm
R3 = 100 kOhm
Für den OV2 wird ein Leistungsoperationsverstärker vom Typ L272 der Firma
SGS Thomson verwendet. Er lässt eine maximale Belastung von 5 Watt zu.
Einen Schaltplan / Anschlussplan ist im Anhang beigefügt.
4.1.5 Spannungsversorgung
Die Spannungsversorgung von +/- 12 V wurde mittels eines Netztrafos,
Gleichrichter und einer Spannungsstabilisierung aufgebaut. Der genaue Aufbau
kann aus dem Schaltplan, welcher im Anhang beigefügt ist, entnommen werden.
4.1.6 Signalverstärkung
Um den optimalen Messbereich des Analog-Digital-Wandler der
DatenAcquisitationsCard 700 (DAQ Card 700) von National Instruments, welche
zur Signalerfassung eingesetzt wurde, verwenden zu können, mussten die
Signalpegel des Winkelsensors um den Faktor 10 verstärkt werden. Dies wurde
mit folgender Operationsverstärker-Schaltung realisiert:
Ue 10 kOhm
Ua
+
-
10 Ohm
90 Ohm
Abbildung 13: Signalverstärkung
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 26Kapitel 4: Messaufbau
Für den nicht invertierenden Operations-Verstärker gilt folgender
Zusammenhang:
R1 10
Ue = Ua = Ua Gl. 20
R 1 + RN 100
Aus Gleichung 20 ist erkennbar, dass durch die beschriebene
Widerstandsbeschaltung des Operationsverstärkers eine 10fache Verstärkung
des Eingangssignals erzeugt wird.
4.1.7 Signal-Rausch-Optimierung
Um das Signal-Rauschverhältnis zu erhöhen, wurden die
Spannungsversorgungen der Operationsverstärker gegenüber Masse mit
Kondensatoren (100 µF) abgepuffert. Diese Methode wurde an kritischen
Signalpfade wiederholt angewandt (siehe Schaltplan).
4.1.8 Justierung des Winkelsensors und Signalwertanpassung
Um einen definierten Anfangspunkt in der Mitte des Arbeitsbereichs (Null Grad)
des Drehmagneten zu erzeugen, wurde das Winkelsignal dem Signaleingang
zurückgeführt. Durch Zuführen des Signals, welches durch die Schalterstellung 4
des Umschalters gegeben ist, wird durch die Elektronik der Drehmagnet so
angesteuert, dass er die Null-Position erreicht. Der Arbeitsbereich liegt zwischen
–55° - 55° was ein Spannungbereich von –2,5 V bis +2,5 V entspricht.
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 27Kapitel 4: Messaufbau 4.2 Signalerfassung Die analogen Signale werden mit Hilfe des internen Analog-Digital-Wandlers der verwendeten DatenAcquisitationsCard 700 (DAQ Card 700) von Nationals Instrument mit eingegebener Abtastfrequenz digitalisiert und in einer Ascii-Datei abgespeichert. 4.2.1 Signalgebung Mit Hilfe eines 8 Bit, High Speed, Multiplying DA-Converters (DAC08 von Analog Devices) wurden die digitalen Ansteuer-Signalwerte der Software (s.u.) in Analogwerte konvertiert. Der Spannungsbereich liegt +/- 8V. Aus Abbildung 14 kann die Beziehung zwischen Ausgangsspannung und digitalem Ansteuerungs- Wert entnommen werden. Abbildung 14: Funktioneller Zusammenhang zwischen Ausgangsspannung und digitalem Ansteuerungswert des Drehmoments. Die Beschaltung des D/A- Converters ist im Anhang beigefügt. Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 28
Kapitel 4: Messaufbau
4.3 Ansteuer-/ Messerfassungs-Software
Die Ansteuerungs- und Messerfassungs-Software basiert auf LabView 5.0 von
National Instruments. Das entworfene Programm ist untergliedert in die Bereiche
Signalerfassung und Signalgebung.
Abbildung 15 zeigt die Programmstrukturen der beiden genannten Bereiche des
entwickelten LabView-Programms.
a)
b)
Abbildung 15: Programmstruktur a) Signalgebung b)Messerfassung
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 29Kapitel 4: Messaufbau
Das Programm wurde so gestaltet, dass es sehr flexibel einsetzbar ist. Wie aus
Abbildung 16 ersichtlich ist, besteht die Möglichkeit, je nach Bedarf die
Teilbereiche Signalgebung (Digitalansteuerung) und Messwerterfassung
abzuschalten oder dazu zu schalten. Bei der Messerfassung müssen im Vorfeld
die Werte für Abtastrate (scan-rate) und Messdauer eingegeben werden. Des
weiteren ist es für Justierungszwecke und für Messanwendungen möglich, den
implementierten Voltmeter zur Hilfe zu nehmen.
Abbildung 16: Eingangs-Panel
Nach Eingabe der Parameterwerte (Abtastrate, Messdauer) wird durch Drücken
des GO-Button die Messung gestartet.
Die softwaretechnische Umsetzung der oben genannten Funktionalität in
LabView zeigt Abbildung 17.
Abbildung 17: Hauptprogramm-Quellkode
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 30Kapitel 4: Messaufbau
4.3.1 Messerfassung mittels LabView
Die Messerfassung wird mit einer DAQCard-700 für PCMCIA Bus von National
Instruments durchgeführt. Diese Karte besitzt 16 Kanäle mit 12 bit A/D-
Wandlung. Der Spannungsbereich ist +/- 10 V, jedoch ist es möglich, den Range
des Messbereichs zu variieren. Standardmäßig sind +/- 10 V eingestellt. Die
Abtastfrequenz und die Messdauer wird über das Messprogramm eingegeben.
Nach dem starten der Messung wird der Benutzer aufgefordert den Dateinamen
der Messdatei anzugeben. Anschließend wird die Messung automatisch
gestartet. Abbildung 17 zeigt einen Ausschnitt des Quellcodes. Der Quellcode der
gesamten Software ist im Anhang beigefügt
Abbildung 18: Front-Panel der Signalerfassung und Quellcode
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 31Kapitel 4: Messaufbau
4.3.2 Signalgebung mittels LabView
Zur Ermittlung der viskoelastischen Gewebeeigenschaften von Biomaterialien
wird unter anderem eine Rechtecksignalform mit steigender Amplitude
verwendet. Um eventuelle Fehler durch Rutschen des Applikators zu detektieren,
wird nach jedem Zyklus überprüft, ob der Applikator wieder auf seine
ursprüngliche Winkelposition zurückgekehrt ist. Um Reibungseffekte zu
vermeiden, wird ein Schwingungssignal mit der 100 fachen Frequenz des
Anregungssignals um den Signalwert Null (+/- 10mV) verwendet. Das
Anregungssignalmuster (Abbildung 20) wird vorab gebildet und in einem Array
hinterlegt. Dieses Array wird dann sequentiell durch das Programm abgerufen.
Durch diese Form der Programmierung ist es möglich, beliebige Signalformen als
Array zu erstellen und einzubinden. Die unten stehenden Abbildungen zeigen die
Erstellung und Einbindung des verwendeten Signalarrays.
a)
Signal
-Array
b)
Abbildung 19 Bildung (a) und Einbindung des Signalarrays (b)
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 32Kapitel 4: Messaufbau 4.3.3 Minimierung der Haftreibung durch angepasste Signalgebung Durch Vorversuche konnte eine deutliche Verfälschung der Messergebnisse durch Haftreibung, besonders bei Ansteuerungsspannungen des Drehmomenten zwischen 0,5 V und 1,5 V, ermittelt werden. Um diese Störungen zu beseitigen, wurde das Ansteuersignal-Array so gestaltet, dass kein Stillstand des Applikators während der Messung stattfindet. Die Umsetzung erfolgte durch eine Zitterbewegung um den Spannungswert 0 zwischen den Spannungszyklen. Abbildung 20: Anregungssignalform zur Ermittlung der viskoelatischen Gewebeeigenschaften. Aufgetragen ist hier der digitale Zahlenwert der Spannungen über die Samplingrate. Das hinsichtlich der Haftreibung modifizierte Signalarray ist in Abbildung 20 graphisch dargestellt. Deutlich zu erkennen ist die „Zitterbewegung“ um den Zahlenwert 128, was einem Spannungswert von 0 entspricht. Durch diese „Zitterbewegung“ konnte der Haftreibungseinfluss auf das Messergebnis deutlich reduziert werden. Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 33
Kapitel 4: Messaufbau
4.4 Der mechanische Applikator
Zentraler Bestandteil des Versuchsaufbaus ist der Applikator. Er besteht aus den
Komponenten Drehmagnet mit Winkelsensor (Fa. Magnet-Schulz, Typ G DR X
035) und Kopplungselement. Beide Bestandteile werden in einem Edelstahlrohr
mit einem Außendurchmesser von 40 mm befestigt.
Wichtigste Voraussetzung für eine korrekte Messung ist die rutschfreie
Übertragung des vorgegebenen Drehmoments auf das zu untersuchende
Gewebe. Dies ist insofern begründet, da unser Ansatz zur Bestimmung der
viskoelastischen Eigenschaften von Bio-Geweben auf der Beziehung zwischen
Auslenkwinkel und aufgebrachtem Drehmoment beruht (s.o.). Des weiteren soll
durch das Kopplungselement die Traumatisierung des Gewebes so gering wie
möglich gehalten werden.
4.4.1 Ermittlung eines geeigneten Kopplungselements
Das Kopplungselement stellt die Schnittstelle zwischen Gewebe und Messsystem
dar. Die Voraussetzung für eine genaue fehlerfreie Durchführung der Versuche
ist ein Kopplungselement mit sehr hoher Haftreibungszahl (s.o.). Für die
Entwicklung eines geeigneten Kopplungselements wurden folgende Ideen in
Betracht gezogen:
1) Material mit geeigneter Oberflächenbeschaffenheit Õ hoher Rz –Wert (mittlere
Rautiefe) erreichbar durch
- Bestrahlung des Grundmaterials mit entsprechendem Strahlgut
(Sandstrahlen)
- Plasmaspritzen (z.B. mit Keramik)
- Schleifen (Vorteil schnell definierte unterschiedliche Rauheit herstellbar,
mittels genormten Hilfsmittel)
- Rändeln (Vorteile wie beim Schleifen) und Prägen (Vorteile wie beim
Schleifen)
Heiko Sailer Messung viskoelastischer Gewebeeigenschaften in vivo 34Sie können auch lesen