Traffa - Innovative Antriebslösungen - TBT Technisches Büro Traffa
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Traffa
PlusSystem 220SP
Innovative Antriebslösungen
Der optimale Antrieb individuell für Ihre Anforderung
Plus System
ROBOT Serie
Beschreibung ROBOT Serie
P
L
S
Abb. 21
ROBOT Korrosionsgeschützte Version
Die Linearachsen der Baureihe ROBOT sind besonders für Anwendun- Für Anwendungen in rauen Umgebungen bzw. bei häufigem Wasserkon-
gen mit hohen Tragzahlen geeignet, bei denen der Laufwagen starken takt sind alle Linearachsen des Plus Systems mit Edelstahlelementen
Kräften unterworfen ist, oder für Linearbewegungen bei SCARA-Robotern, erhältlich.
die in Produktionslinien eingesetzt werden. Die Baureihe ROBOT eignet
sich durch ihren robusten Aufbau und ihre hohen Tragzahlen für alle Die Lineareinheiten des Plus Systems werden aus stranggepresstem,
anspruchsvollen Anwendungsbereiche. eloxiertem und korrosionsbeständigem Aluminium der Legierungen 6060
und 6082 gefertigt und umschließen Lager, Linearführungen, Muttern und
Die Lineareinheiten der Baureihe ROBOT sind in vier Baugrößen von 100 Schrauben aus kohlenstoffarmem Stahl SS AISI 303 und 404C. Dadurch
mm bis 220 mm lieferbar. Sie verfügen über eine robuste Struktur aus wird Korrosion aufgrund von Feuchtigkeit in den jeweiligen Betriebsumge-
einem stranggepressten, eloxierten Aluminiumprofil mit rechteckigem bungen verhindert bzw. verzögert.
Querschnitt. Die Antriebskraft wird durch einen stahlverstärkten Zahnrie-
men aus Polyurethan übertragen. Der Laufwagen fährt auf zwei parallelen Durch spezielle, ablagerungsfreie Oberflächenbehandlungen, kombiniert
Linearführungen mit vier selbstschmierenden, wartungsarmen Kuge- mit einem Schmiersystem, das FDA zugelassene Schmiermittel ver-
lumlaufführungen, die den Laufwagen und alle auftretenden Lasten und wendet, können die Linearachsen in hochempfindlichen und kritischen
Momente stützen. Daneben sind auch mehrere eigenständige oder leer- Anwendungen eingesetzt werden. Dazu gehört die Lebensmittel- und
laufende Laufwagen erhältlich, um die Tragfähigkeit weiter zu steigern. Pharmaindustrie, wo eine Produktkontamination ausgeschlossen werden
muss.
Ein Abdeckriemen aus Polyurethan schützt den Riemenantrieb vor Staub,
Schmutz, Fremdkörpern, Flüssigkeiten und anderen Verunreinigungen. ■ Innere Bauteile aus Edelstahl
■ Stranggepresstes, eloxiertes Aluminium 6060 und 6082,
Die Baureihe ROBOT ist die erste Wahl bei schweren Anwendungen mit korrosionsgeschützt
hohen Verfahrgeschwindigkeiten und wechselnder Last in aggressiven ■ Linearführungen, Muttern, Schrauben und Komponenten aus
Betriebsumgebungen, bei denen eine wartungsarme industrielle Automa- kohlenstoffarmem Stahl SS AISI 303 und 404C
tisierungslösung mit hoher Wiederholgenauigkeit verlangt wird. ■ FDA zugelassene Schmiermittel
Für jede Größe der Baureihe ROBOT ist auch die Version 2C mit 2 un-
abhängigen Laufwagen verfügbar. Jeder Laufwagen wird durch einen
separaten Zahnriemen angetrieben. Am Antriebskopf sitzt dafür auf jeder
Seite ein Getriebe. Diese Lösung ist hervorragend geeignet für “Pick and
Place” Systeme oder Be- und Entlademaschinen.
PLS-15
2 ROBOT Serie
Aufbau des Systems
Aluminiumprofil
Die selbsttragenden Profile, die in der Lineareinheit der ROBOT Serie Um vorzeitigen Verschleiß durch Durchhängen des Antriebsriemens bei
eingesetzt werden, wurden in Zusammenarbeit mit einem führenden großen Hublängen und bei seitlich gekippter Montage zu verhindern, sind
Hersteller dieses Sektors konzipiert und konstruiert, sodass eloxierte in den Endköpfen der Lineareinheiten zusätzliche Kugellager angebracht,
Präzisions-Strangpressprofile mit hohen mechanischen Eigenschaften die den Riemen im Bereich der Umlenkung exakt und reibungsarm auf der
und hohen Flächenträgheitsmomenten realisiert werden konnten. Die Ab- Zahnriemenscheibe führen.
messungen sind entsprechend EN 755-9 toleriert. Das verwendete Ma-
terial ist eloxiertes Aluminium der Legierung 6060. An den Außenseiten Laufwagen
der Strangpressprofile befinden sich des weiteren Nuten für eine einfache Der Laufwagen der Lineareinheiten der ROBOT Serie besteht aus elo-
und schnelle Montage und/oder zur Befestigung von Zubehörelementen. xiertem Aluminium Die Abmessungen variieren entsprechend der ver-
schiedenen Typen. Der Laufwagen besteht aus zwei Einzelteilen, um das
Antriebsriemen Durchlaufen des Schutzriemens zu ermöglichen. Die Gewinde der Befes-
In den Lineareinheiten der ROBOT Serie werden stahlverstärkte Zahnrie- tigungsbohrungen sind mit Stahleinsätzen versehen. In den Front- und
men aus Polyurethan mit AT-Zahnprofil eingesetzt. Dieser Zahnriemen- Seitenteilen des Laufwagens sind Bürstendichtungen eingesetzt, die zu-
Typ hat sich in bezug auf zulässige Antriebsmomente, Kompaktheit und sätzlichen Schutz gegen das Eindringen von Schmutz bieten.
Geräuschentwicklung als der zweckmäßigste für die Antriebsübertragung
in Lineareinheiten erwiesen. Die Kombination mit Nullspiel-Zahnriemen- Abdeckriemen
scheiben ermöglicht so Wechselbelastungen ohne Umkehrspiel. Durch Die Lineareinheiten der ROBOT Serie sind mit einem Polyurethan-Rie-
Ausnutzung der durch das Profil vorgegebenen maximalen Zahnriemen- men ausgestattet, der alle im Profilinnern liegenden mechanischen Teile
breite und Einstellung einer optimalen Vorspannung des Riemens können vor Verschmutzungen von Außen und somit vor vorzeitigem Verschleiß
die folgenden Eigenschaften erreicht werden: schützt. Der Abdeckriemen, der an den Enden der Lineareinheit befestigt
■ Hohe Verfahrgeschwindigkeiten ist, wird durch Kugellager geführt, die sich im Innern des Laufwagens
■ Geringe Geräuschentwicklung befinden. Das ermöglicht ein Durchlaufen des Abdeckriemens durch den
■ Niedriger Verschleiß Laufwagen mit geringster Reibung.
Allgemeine Daten des verwendeten Aluminiums: AL 6060
Chemische Zusammensetzung [%]
AI Mg Si Fe Mn Zn Cu Verunreinigungen
Rest 0.35-0.60 0.30-0.60 0.30 0.10 0.10 0.10 0.05-0.15
Tab. 33
Physikalische Eigenschaften
Dichte Elastizitäts- Wärmeausdehnungs- Wärmeleitfähigkeit Spezifische Spez. Wider- Schmelz
modul koeffizient (20°-100°C) (20°C) Wärme (0°-100°C) stand temperatur
kg kN 10-6 W J
___ ___ ___ _____ _____ Ω . m . 10-9 °C
3 2
dm mm K m.K kg . K
2.7 69 23 200 880-900 33 600-655
Tab. 34
Mechanische Eigenschaften
Rm Rp (02) A HB
N N
___ ___ % __
mm2 mm2
205 165 10 60-80
Tab. 35
PLS-16
Plus System
Führungssysteme
Das Führungssystem ist ausschlaggebend für die maximal zulässigen
Tragzahlen, Geschwindigkeiten und Beschleunigungen. Lineareinheiten
der ELM Serie werden mit zwei Führungssystemen angeboten:
ROBOT...SP mit Kugelumlauf-Linearführungen ROBOT...CE mit Laufrollenführung
■ Zwei Kugelumlauf-Linearführungen mit Tragzahlen für extrem hohe ■ Zwei Rundstangen aus gehärtetem und geschliffenem Stahl
P
Belastungen werden außen in den dafür vorgesehenen Nuten des Alu- (58/60HRC - h6) werden in die dafür vorgesehen Nuten außen am L
miniumprofils befestigt. Aluminiumprofil eingestemmt. S
■ Der Laufwagen der Lineareinheit wird auf vier vorgespannte Linearfüh- ■ Im Laufwagen sind sechs doppelreihig kugelgelagerte Laufrollen mit
rungswagen montiert. gotischem Laufbahnprofil montiert. Dadurch wird je Laufrolle ein Zwei-
■ Aufgrund der vier Kugelreihen, die sich in jedem Kugelumlaufwagen punkt-Kontakt mit den Rundstangen hergestellt, der eine Kraftaufnah-
befinden, kann das Linearführungssystem höchste Kräfte aus allen me aus allen Richtungen ermöglicht (außer für Roboter 160).
Richtungen aufnehmen. ■ Die sechs Laufrollen sind auf Stahlbolzen im Laufwagen gelagert, zwei
■ Die Linearführungswagen sind zum Schutz gegen Eindringen von davon exzentrisch, um das System spielfrei bzw. mit Vorspannung ein-
Schmutz allseitig mit Abstreifern versehen. Bei sehr hohem Ver- stellen zu können (außer für Roboter 160).
schmutzungsgrad, können zusätzliche Abstreifer montiert werden. ■ Um die Laufbahnen sauber und geschmiert zu halten, sind an den
■ Die Linearführungswagen sind zusätzlich mit einer Kugelkette ausge- Laufwagenenden fließfettgetränkte Filzstücke eingesetzt.
rüstet. Die Kugelkette sorgt dafür, dass die Wälzkörper während ihrer
Bewegung durch den Linearführungswagen in Abstand zueinander
gehalten und in den Laufbahnen geführt werden.
■ An den Stirnseiten der Linearführungswagen sind Schmierstoffreser-
voirs angebracht. Diese geben kontinuierlich Schmierstoff an die Ku-
gelreihen ab und ermöglichen so eine Langzeitschmierung.
Mit dem oben beschriebenen Fuhrungssystem werden folgende Mit dem oben beschriebenen Führungssystem werden folgende
Eigenschaften erreicht: Eigenschaften erreicht:
■ Hohe Geschwindigkeiten und hohe Beschleunigungen ■ Gute Positioniergenauigkeit
■ Hohe Tragzahlen ■ Hohe Laufruhe
■ Hohe zulässige Momentbelastungen ■ Wartungsarm (abhängig vom Anwendungsfall)
■ Niedrige Verschiebewiderstände durch geringe Reibung
■ Hohe Lebensdauer
■ Wartungsarm (abhängig vom Anwendungsfall, siehe S. PLS-32
"Schmierung")
■ reduzierte Laufgeräusche
ROBOT SP Querschnitt ROBOT CE Querschnitt
Abb. 22 Abb. 23
ROBOT 2C
Für SP und CE Linearführungssysteme ist die 2C-Version mit 2 unabhängigen Laufwagen auf einer Achse erhältlich.
PLS-17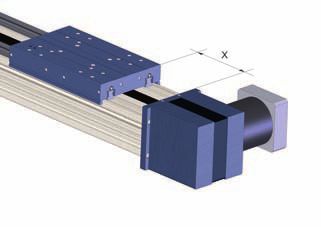
2 ROBOT Serie
ROBOT 220 SP
Abmessungen ROBOT 220 SP
L = 690 + NENNHUB + SICHERHEIT
15 145
130 72.5 72.5
72.5
50
145
50
72.5
10 380 10
8xM10 16 tief 160
56
170
220
245
245
55 60
56 270 55
SCHMIERNIPPEL
220
20
12
16
24
3.5
61
155
100
52
11.3
24
18 24 172 24
* Die Sicherheits-Hublänge wird abhängig von den kundenspezifischen Anforderungen ermittelt Abb. 36
Technische Daten Flächenträgheitsmomente der Aluminiumprofile
Typ Typ Ix Iy Ip
[107 mm4] [107 mm4] [107 mm4]
ROBOT 220 SP
ROBOT 220 0.65 3.26 3.92
Maximale Hublänge [mm]*1 6000
Tab. 85
Max. Wiederholgenauigkeit [mm]*2 ± 0.05
Antriebsriemen
Maximale Geschwindigkeit [m/s] 5.0 Der Antriebsriemen besteht aus abriebfestem stahlver-
Maximale Beschleunigung [m/s ] 2
50 stärktem Polyurethan für hohe Zugkräfte.
Zahnriemen-Typ 100 AT 10
Typ Zahnriemenscheibe Z 25 Typ Riementyp Riemenbreite Gewicht
[mm] kg/m
Riemenscheibendurchmesser [mm] 79.58
Laufwagenhub je Umdrehung Zahnriemenscheibe [mm] 250 ROBOT 220 SP 100 AT 10 100 0.58
Gewicht des Laufwagens [kg] 14.4 Tab. 86
Gewicht Hub Null [kg] 41 Riemenlänge (mm) = 2 x L - 120
Gewicht je 100 mm Hub [kg] 2.5
Losbrechmoment [Nm] 6.4 Fz
Mz
Riemenscheiben-Trägheitsmoment [g mm2] 4.114 · 106
*1) Hublängen bis 11000 mm als Stoßversion möglich Tab. 84 Mx
*2) Die Wiederholgenauigkeitist abhängig von der verwendeten Antriebsart
My
Fx Fy
ROBOT 220 SP - Tragzahlen
Typ Fx Fy Fz Mx My Mz
[N] [N] [N] [Nm] [Nm] [Nm]
Stat. Dyn. Stat. Dyn Stat. Dyn Stat. Dyn Stat. Dyn Stat. Dyn
ROBOT 220 SP 8510 5520 158000 110000 158000 110000 13588 9460 17696 12320 17696 12320
Siehe Prüfung unter Statische Belastung und Lebensdauer auf Seite SL-2ff Tab. 87
PLS-30
Plus System
ROBOT 220 SP-2C DOPPELTE UNABHÄNGIGE WAGEN
ROBOT 220 SP-2C dimensions
L = 1080 + NENNHUB + SICHERHEIT
15 145
130 72.5 72.5
72.5 72.5
50
145
50
P
10 380 10 380 10
8xM10 16 tief 8xM10 16 tief 160 L
S
56
56
245
60
60
220
170
56
56
245 55 270 55 55 270 55
SCHMIERNIPPEL
220
20
12
16
24
3.5
61
155
100
52
11.3
24
18 24 172 24
* Die Sicherheits-Hublänge wird abhängig von den kundenspezifischen Anforderungen ermittelt Abb. 37
Technische Daten Flächenträgheitsmomente der Aluminiumprofile
Typ Typ Ix Iy Ip
[107 mm4] [107 mm4] [107 mm4]
ROBOT 220 SP-2C
ROBOT 220 0.65 3.26 3.92
Maximale Hublänge [mm]*1 6000
Tab. 89
Max. Wiederholgenauigkeit [mm]*2 ± 0.05
Antriebsriemen
Maximale Geschwindigkeit [m/s] 5.0 Der Antriebsriemen besteht aus abriebfestem stahlver-
Maximale Beschleunigung [m/s ] 2
50 stärktem Polyurethan für hohe Zugkräfte.
Zahnriemen-Typ 40 AT 10
Typ Zahnriemenscheibe Z 25 Typ Riementyp Riemenbreite Gewicht
[mm] kg/m
Riemenscheibendurchmesser [mm] 79.58
Laufwagenhub je Umdrehung Zahnriemenscheibe [mm] 250 ROBOT 220 SP-2C 40 AT 10 40 0.23
Gewicht des Laufwagens [kg] 13.3 Tab. 90
Gewicht Hub Null [kg] 46 Riemenlänge (mm) = 2 x L - 120
Zwei Bänder für jeden Förderer.
Gewicht je 100 mm Hub [kg] 2.5
Losbrechmoment [Nm] 6.4 Fz
Mz
Riemenscheiben-Trägheitsmoment [g mm2] 2.026 · 106
*1) Hublängen bis 11000 mm als Stoßversion möglich Tab. 88 Mx
*2) Die Wiederholgenauigkeitist abhängig von der verwendeten Antriebsart
My
Fx Fy
ROBOT 220 SP-2C - Tragzahlen
Typ Fx Fy Fz Mx My Mz
[N] [N] [N] [Nm] [Nm] [Nm]
Stat. Dyn. Stat. Dyn Stat. Dyn Stat. Dyn Stat. Dyn Stat. Dyn
ROBOT 220 SP-2C 3404 2208 158000 110000 158000 110000 13588 9460 17696 12320 17696 12320
Siehe Prüfung unter Statische Belastung und Lebensdauer auf Seite SL-2ff Tab. 91
PLS-31
2 ROBOT Serie
Schmierung
Lineareinheiten Typ SP mit Kugelumlaufführungen
In den Lineareinheiten der Ausführung ROBOT werden wartungsarme intervalle: SP-Version: alle 5000 km bzw. 1 Jahr Nutzungsdauer (es gilt
Kugelumlauf-Linearführungen eingesetzt. der zuerst erreichte Wert). Im Fall von hohen Belastungen und hoher
In den Linearführungswagen werden die Wälzkörper in einer Kunststoff- Dynamik wenden Sie sich bitte an unsere Anwendungstechnik zur ge-
kette gehalten, die die metallische Reibung zwischenden Kugeln verhin- nauen Prüfung.
dert und die sie auf ihrer Bahn durch die Kugelumläufe führt. Dadurch
wird der Verschleiß der Kugeln verringert und folglich die Lebensdauer Lineareinheiten Typ CE mit Laufrollenführungen
erhöht. Lineareinheiten mit Laufrollenführungen werden durch zwei mit Fett ge-
Um das System wartungsarm auszuführen sind an den Stirnseiten der tränkte Filzabstreifer geschmiert. Je nach Anwendungsfall reicht die ent-
Linearführungswagen Schmiervorsätze angebracht, die eine bestimmte haltene Schmierstoffmenge für Laufleistungen bis ca. 6.000 km. Für eine
Menge an Schmierstoff gespeichert haben und diesen kontinuierlich an eventuelle Nachfüllung der Reservoire zur Erzielung größerer Laufleistun-
die Kugelumläufe abgeben. Dieses System garantiert lange Wartungs- gen wenden Sie sich bitte an unsere Anwendungstechnik.
Nachschmiermenge (je Schmieranschluß):
Typ Menge [g]
ROBOT 100 SP 1
ROBOT 130 SP 0.8
ROBOT 160 SP 1.4
ROBOT 220 SP 2.8
Tab. 92
Abb. 38
■ Adapter der Schmierpumpe auf Schmiernippel am Laufwagens ■ Bei besonderen Bedingungen (hohe Belastungen, große Verschmut-
aufstecken und entsprechende Nachschmiermenge je Schmieran- zungen, etc.) bitte Nachschmierintervalle und Schmierstoff vom Herstel-
schluß einfüllen. ler bestimmen lassen. Für ausführliche Informationen über Schmierung
■ Zu verwendender Schmierstoff: Lithiumverseiftes Fett der Konsist wenden Sie sich bitte an unsere Anwendungstechnik.
enzklasse NLGI 2.
Planetengetriebe
Rechts- oder linksseitige Montage in Bezug auf den Antriebskopf
übertragen. Dieses System garantiert einen spielfreien Antrieb während
des gesamten Betriebes.
Versionen mit Planetengetriebe
Planetengetriebe werden vor allem in den Bereichen Automation, Hand-
habung, und Robotik eingesetzt, wenn hohe Anforderungen an Dynamik
und Präzision gestellt werden. Planetengetriebe sind standardmäßig mit
Winkelspiel < 3 arcmin bis < 15 arcmin und Übersetzungen von i = 3 bis
ØD2 i = 1000 erhältlich. Für die Montage von nicht standardmäßigen Plane-
H
tengetrieben setzen Sie sich bitte mit Rollon in Verbindung.
ØD3
Rechts
Abb. 39
Die Lineareinheiten der ROBOT Serie können mit verschiedenen Versi-
onen von Antrieben ausgestattet werden. Bei allen Versionen wird das Links
Antriebsmoment auf die Zahnriemenscheibe mittels Schrumpfscheibe
PLS-32
Plus System
Zapfen
Zapfen Typ AS
D1 Typ Zapfentyp B D1
B
ROBOT 100 AS 15 35 15h7
ROBOT 130 AS 20 40 20h7
P
ROBOT 160 AS 25 50 25h7 L
ROBOT 220 AS 25 50 25h7 S
Tab. 93
B
D1
Der Zapfen kann auf beiden Seiten der Lineareinheit vorgesehen werden
Abb. 40
Passend für Typ Zapfentyp Antriebskopf Antriebskopf Antriebskopf
AS links AS rechts beidseitig AS
ROBOT 100 AS 15 1E 1C 1A
ROBOT 130 AS 20 1E 1C 1A
ROBOT 160 AS 25 1E 1C 1A
ROBOT 220 AS 25 1E 1C 1A
Tab. 94
Zapfen Typ AE10 für Montage von Drehgebern + AS
Typ A B Antriebskopf Antriebskopf
AS rechts AS links
+ AE + AE
B
ROBOT 100 4xM4 Ø49 1G 1I
A
ROBOT 130 4xM4 Ø79 1G 1I
ROBOT 160 4xM4 Ø76 1G 1I
ROBOT 220 4xM4 Ø76 1G 1I
Tab. 95
10
20
Der Zapfen kann auf beiden Seiten der Lineareinheit vorgesehen werden
Abb. 41
PLS-33
2 ROBOT Serie
Hohlwellen
Hohlwelle Typ AC
PASSFEDERNUT BxH
N° 4XF D2
E
D3
D1
Abb. 42
Einheit (mm)
Passend für Typ Zapfentyp D1 D2 D3 E F Passfeder Antriebs-
BxH kopf
ROBOT 100 AC19 19H7 80 100 3 M6 6x6 2A
ROBOT 130 AC19 19H7 80 100 4.5 M6 6x6 2A
ROBOT 130 AC20 20H7 80 100 4.5 M6 6x6 2C
ROBOT 130 AC25 25H7 110 130 4.5 M8 8x7 2E
ROBOT 160 AC25 25H7 110 130 4.5 M8 8x7 2A
ROBOT 160 AC32 32H7 130 165 4.5 M10 10 x 8 2C
ROBOT 220 AC25 25H7 110 130 4.5 M8 8x7 2A
ROBOT 220 AC32 32H7 130 165 4.5 M10 10 x 8 2C
Tab. 96
Für die Montage von angebotenen Standard-Getrieben über Hohlwelle ist
ein Adapterflansch erforderlich, der bei Rollon erhältlich ist.
Zubehör
Befestigung mit Spannpratzen
Aufgrund der verwendeten Führungssysteme, die Belastungen aus allen
Richtungen erlauben, können Lineareinheiten der ROBOT Serie in jegli-
cher Position befestigt werden.
Bitte benutzen Sie dabei die folgenden Befestigungsmethoden.
A Typ A
(mm)
ROBOT 100 112
ROBOT 130 144
ROBOT 160 180
ROBOT 220 240
Tab. 97
Abb. 43
PLS-34
Plus System
Spannpratzen Befestigung mit Nutensteinen
L A
L1 D1
F
C C
H1
E
L L
I I
D2
P
B
L
C S
Abb. 44 Abb. 45
Ein Block aus eloxiertem Aluminium zur Befestigung von Lineareinheiten Achtung:
über die seitlichen Nuten am Profil. Die Lineareinheit nicht an den Endköpfen am Ende des Aluminiumprofils
befestigen.
Abmessungen (mm)
Typ A B C E F D1 D2 H1 L L1 Bestellcode
ROBOT 100 20 6 16 10 5.5 9.5 5.3 14 35 17.5 1000958
ROBOT 130 20 7 16 12.7 7 10.5 6.5 18.7 50 25 1001061
ROBOT 160 36.5 10 31 18.5 10.5 16.5 10.5 28.5 100 50 1001233
ROBOT 220 36.5 10 31 18.5 10.5 16.5 10.5 28.5 100 50 1001233
Tab. 98
Nutensteine
T-Nutensteine aus Stahl zur Verwendung in den Nuten am Profil
K
D4
H2
G
D3
L=Seitlich / C=Zentral / I=Unten - Siehe hierzu Abb. 45 Abb. 46
Abmessungen (mm)
Typ D3 D4 G H2 K Bestellcode
ROBOT 100 L-I - M4 - 3.4 8 1001046
ROBOT 130 C - M3 - 4 6 1001097
ROBOT 130 L-I 8 M6 3.3 8.3 13 1000043
ROBOT 160 C - M6 - 5.8 13 1000910
ROBOT 160 I 8 M6 3.3 8.3 13 1000043
ROBOT 160 L 11 M8 2.8 10.8 17 1000932
ROBOT 220 L-I 11 M8 2.8 10.8 17 1000932
Tab. 99
PLS-352 ROBOT Serie
Befestigungsmaterial für Näherungsschalter ROBOT...SP
Halter für Näherungsschalter
Schaltwinkel für Schaltwinkel für
Näherungsschalter PATTINO PER PROXIMITY
Näherungsschalter Halter für
Ein Block aus rot-eloxiertem Aluminium, komplett mit Nutensteinen aus-
PATTINO PER PROXIMITY
B4 PORTA PROXIMITY
Näherungsschalter gerüstet, dient zur Montage von induktiven Näherungsschaltern.
H4
H5
Schaltwinkel für Näherungsschalter
B5 Ein verzinkter Schaltwinkel, der am Laufwagen befestigt wird, dient zum
L4 L5
Halter für
PORTA PROXIMITY
Näherungsschalter
Aktivieren des Näherungsschalters..
Abb. 47
Abmessungen (mm)
Typ B4 B5 L4 L5 H4 H5 Für Schaltwinkel Sensorhalter
Näherungss- Bestellcode Bestellcode
chalter
ROBOT SP 100 9.5 20 25 45 12 25 Ø8 G000268 G000092
ROBOT SP 130 21 28 50 60 20 40 Ø 12 G000269 G000126
ROBOT SP 160 21 28 50 64 20 40 Ø 12 G000269 G000123
ROBOT SP 220 21 28 50 70 20 40 Ø 12 G000269 G000207
Tab. 100
Achtung:
Bei Verwendung von Faltenbälgen können die oben aufgeführten Zube-
hörteile für Näherungsschalter nicht verwendet werden.
Näherungsschalter ROBOT...CE
Halter für Näherungsschalter
Schaltwinkel für PROXIMITY
PATTINO PER Schaltwinkel für
PATTINO PER PROXIMITY
Näherungsschalter Näherungsschalter Ein Block aus rot-eloxiertem Aluminium, komplett mit Nutensteinen aus-
Halter für
B4 PORTA PROXIMITY
Näherungsschalter gerüstet, dient zur Montage von induktiven Näherungsschaltern.
Schaltwinkel für Näherungsschalter
H4
H5
B5 Ein verzinkter Schaltwinkel, der am Laufwagen befestigt wird, dient zum
Halter für
PORTA PROXIMITY L4 L5
Aktivieren des Näherungsschalters.
Näherungsschalter
Abb. 48
Abmessungen (mm)
Typ B4 B5 L4 L5 H4 H5 Für Schaltwinkel Sensorhalter
Näherungss- Bestellcode Bestellcode
chalter
ROBOT CE 100 9.5 47 25 29 12 20 Ø8 G000268 G000756
ROBOT CE 130 21 57 50 40 20 25 Ø 12 G000269 G000125
ROBOT CE 160 21 57 50 40 20 28.5 Ø 12 G000269 G000124
Tab. 101
Achtung:
Bei Verwendung von Faltenbälgen können die oben aufgeführten Zube-
hörteile für Näherungsschalter nicht verwendet werden.
PLS-36Plus System
Abdeckungen
Dichtungen der Kugel-Linearführungen
L = D + E + F + 2(PCH + 5) + Nennhub
D PA E PCH F
Die Lineareinheiten, die mit Kugel-Linearführungen ausgerüstet sind,
A
haben standardmäßig End- und Seitendichtungen aus NBR (Kautschuk),
C
die die Wagen der Linearführung vor Verschmutzung und vorzeitigem Ver-
AP Laufwagen CE schleiß schützen.
Zusätzliche Schutzabdeckungen
Für den Einsatz in Umgebungen mit stärksten Verschmutzungen oder bei
P
Laufwagen SP anderen kritischen Einflüssen, können Lineareinheiten der ROBOT Serie- L
Abb. 49 zusätzlich mit Faltenbälgen aus verschiedensten Materialien ausgerüstet S
werden. Die Faltenbälge werden an den Enden der Lineareinheit und an
Abdeckriemen
den Kopfseiten des Laufwagens mittels Klettband befestigt. Das verein-
Alle Lineareinheiten der ROBOT Serie sind standardmäßig mit Abdeck-
facht Montage und Austausch.
riemen aus Polyurethan ausgerüstet, der alle im Profilinnern liegenden
Die Gesamtlänge der Lineareinheit (Maß L) muß bei Verwendung von Fal-
mechanischen Bauteile vor Verschmutzungen von Außen und somit vor-
tenbälgen um die Länge der geschlossenen Faltenpakete (2xPCH) verlän-
zeitigem Verschleiß schützt. Der Abdeckriemen, der an den Enden der Li-
gert werden.
neareinheit befestigt ist, wird durch Kugellager geführt, die sich im Innern
s. Abb. 49.
des Laufwagens befinden. Das ermöglicht ein Durchlaufen des Abdeck-
riemens durch den Laufwagen mit geringster Reibung.
Abmessungen (mm)
Standard-Material: Nylon, polyurethan beschichtet
Typ A C D E F
Materialien auf Anfrage: Nylon, PVC beschichtet; Glasfaser; Edelstahl
Achtung: Bei Verwendung von Faltenbälgen können die Zubehörteile für
ROBOT 130 174 103 95 230 135 Näherungsschalter nicht verwendet werden.
ROBOT 160 204 131.5 110 280 160
ROBOT 220 275 149.5 130 380 160
Tab. 102
PLS-372 ROBOT series
Montagekits
Abb. 50 Abb. 51
Um eine Achse der ROBOT Serie mit anderen Achsen zu einem Mehrachssystem zu kombinieren, bietet ROLLON entsprechende Befestigungskits an. Zur
Montage des Befestigungsmaterials wird an beiden Enden der Achse eine definierte Länge ohne Führungsschiene benötigt. Die verfügbaren Kombinationen
und Längen sind in der folgenden Tabelle ersichtlich.
Beispiel Achsenkombination Bestellcode X Länge Profil ohne
Montage Kit Führungsschiene (mm)
ROBOT 100 - ELM 65 G000205 75
ROBOT 100 - ROBOT 130 G000201 140
ROBOT 100 - ECO 80 G000203 90
ROBOT 100 - E-SMART 50 G000642 60
ROBOT 130 - ELM 65 G000196 75
ROBOT 130 - ELM 80 G000195 90
ROBOT 130 - ROBOT 130 G000197 140
ROBOT 130 - ROBOT 160 G000198 170
ROBOT 160 - ELM 80 G000204 90
ROBOT 160 - ELM 110 G000452 120
ROBOT 160 - ROBOT 160 G000202 170
ROBOT 160 - ROBOT 220 G000202 230
ROBOT 220 - ELM 110 G000199 120
*Das Maß X(Längenreduzierung der Kugelumlaufführungen) berücksichtigt den Platzbedarf der Adapterplatten, der notwendig Tab. 103
ist um Achsenkombinationen (Portale) aufzubauen.
PLS-38Zweiachsensysteme Zweiachsensysteme Dreiachsensysteme Dreiachsensysteme Dreiachsensysteme Dreiachsensysteme Zentrale: NL Bayern: TBT-Technisches Büro Traffa e.K. TBT Technisches Büro Traffa e.K. Theodor-Heuss-Str. 8 Schöneckerstr. 4 D- 71336 Waiblingen D- 91522 Ansbach Tel.: +49 (0) 71 51 / 604 24 -0 Tel.: +49 (0) 981 / 48 78 66-50 Fax.: +49 (0) 71 51 / 604 24 40 Fax.: +49 (0) 981 / 48 78 66-55 E-Mail: info@traffa.de E-Mail: mail@traffa.de Web: www.traffa.de Web: www.traffa.de
Sie können auch lesen