AHORN 2019 Bernau am Chiemsee 11 - Dezember
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

02
2019
AHORN 2019
Bernau am Chiemsee
11. - 12. Dezember
The Navigation FLASHLIGHT
19.
Jahrgang
Galileo Totalausfall Geo-Tag TU Wien Projekt: RaPPPid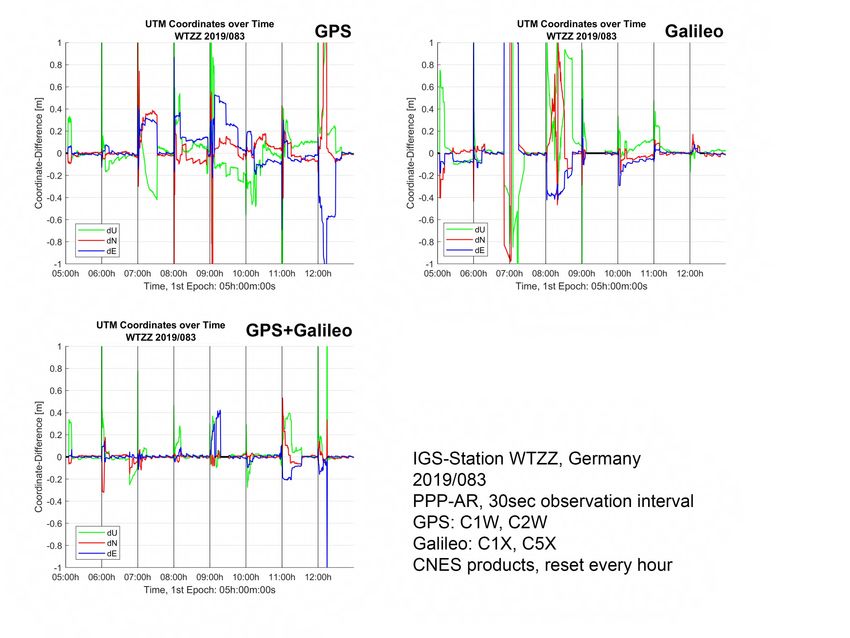
Titelfoto: ESA / Bearbeitung: Wasle
Editorial
Inhalt 2|2019
Robert Weber
Redaktion
Galileo Totalausfall . . . . . . . . . . . . . . . . . . . . . . . . .3
Liebe Leserin, lieber Leser,
Geo-Tag #2 an der TU Wien . . . . . . . . . . . . . . .5
Ich hoffe Sie haben die Sommermonate zu einem
erholsamen Urlaub nutzen können. Ich darf Sie heu-
Galileo Science Colloquium . . . . . . . . . . . . . . . . . 8 te in dieser Kolumne an Stelle unserer bewährten
Redaktionsleiterin Dr. Nina Magnet begrüßen, die
Projekt RaPPPid . . . . . . . . . . . . . . . . . . . . . . . . . . 9 im kommenden Jahr nach ihrem Mutterschutz aber
wieder die Redaktion übernehmen wird.
AHORN 2019 . . . . . . . . . . . . . . . . . . . . . . . . . . . . 15 Wie Sie dem Heft entnehmen können und wohl
auch aus den Medien erfahren haben, hatte Ga-
lileo im Sommer einen nicht unbeträchtlichen Aus-
Studierendenförderung . . . . . . . . . . . . . . . . . . . . 17 fall zu vermelden. Die meisten Anwendungen wa-
ren aber nicht essentiell betroffen und konnten auf
Veranstaltungshinweise . . . . . . . . . . . . . . . . . . . . 18 GPS Dienste zurückgreifen, was die Wichtigkeit
von Backupsystemen für alle Navigationsanwen-
dungen zeigte. Inzwischen konnten die Fehlerursa-
Ausschreibungen im Bereich GNSS . . . . . . . . .20 chen identifiziert und nachhaltig behoben werden.
Anfang September fand in Zürich das 7. Interna-
tionale Kolloquium zu GNSS speziell Galileo statt.
Hier wurde eine Vielzahl neuer Galileo-basierter Ap-
plikation vorgestellt und ein Ausblick auf die zwei-
te Generation von Galileo Satelliten gegeben. Nicht
vergessen möchte ich auch auf die in Stuttgart ab-
gehaltene Intergeo, bei der diesmal wieder Drohnen
und Multisensorsysteme im Zentrum der Ausstel-
lung standen.
Mit den besten Wünschen für einen interessanten
und erfolgreichen Herbst wünsche ich Ihnen viel
Spaß beim Lesen dieser Ausgabe des Flashlight.
Robert Weber
Impressum
Herausgeber Österreichischer Verein für Navigation c (OVN)
Inhaber Österreichischer Verein für Navigation c (OVN), Steyrergasse 30, 8010 Graz, ZVR-Zahl: 110115751
Redaktion Dr. Nina Magnet, TeleConsult Austria GmbH, nina.magnet@tca.at
Prof. Dr. Robert Weber, Technische Universität Wien, robert.weber@tuwien.ac.at
Internet www.ovn.at
Falls Sie The Navigation FLASHLIGHT nicht mehr erhalten möchten, kontaktieren Sie bitte ein Mitglied des
Redaktionsteams.
02 | 2019 -2-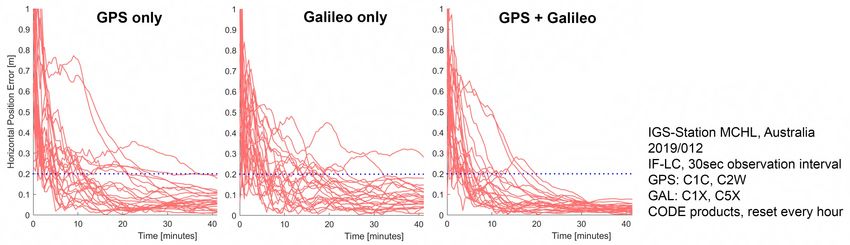
ARTIKEL
Grafiken: ESA - P. Carril, ESA, ESA-J. Huart
Totalausfall legt Galileo für mehrere Tage lahm
„UNTIL FURTHER NOTICE, USERS MAY EXPERIENCE SERVICE DEGRADATI-
ON ON ALL GALILEO SATELLITES. THIS MEANS THAT THE SIGNALS MAY
NOT BE AVAILABLE NOR MEET THE MINIMUM PERFORMANCE LEVELS
DEFINED IN THE SERVICE DEFINITION DOCUMENTS AND SHOULD BE EM-
PLOYED AT USERS’ OWN RISK. THE NOMINAL SERVICE WILL BE RESUMED
AS SOON AS POSSIBLE.“
Diese Nachricht war am 11. Juli 2019 auf der Website
des European GNSS Service Center zu lesen. Aus „as
soon as possible“ wurde schließlich ein sechs Tage lang
andauernder Ausfall der Galileo Signale auf allen Satelli-
ten.
Fehler bei Kontrollzentren
Die GSA (European Global Satellite Systems Agency)
gab als Grund grob an, dass der Vorfall auf eine Geräte-
störung in den beiden Galileo Kontrollzentren in Fucino
(Italien) und Oberpfaffenhofen (Deutschland) zurückzu-
führen wäre.
02 | 2019 -3-
Diese sind zuständig für die Berechnung der Zeit- und Sa- Länge des Ausfalls erstaunt
tellitenbahnprädiktionen, die zur Erstellung der Naviga-
tionsnachricht verwendet werden. Eigentlich sollte durch Der Vorfall verblüffte Forscher und Nutzer auf der gan-
die Redundanz der beiden Stationen Störungen und Aus- zen Welt. Einerseits ist es für viele verständlich, dass
fälle des Satellitensystems vermieden werden. Laut GSA nach erst drei Jahren Betrieb noch nicht alles reibungsfrei
betraf die Fehlfunktion jedoch verschiedene Elemente in funktioniert. Ein Ausfall von mehreren Tagen ist jedoch
beiden Zentren. nur sehr schwer erklärbar. Experten kritisierten, dass
selbst wenn das automatische System zur Berechnung
von Umlaufbahn- und Uhrprodukten und zum Hochla-
den der Daten zu den Satelliten fehlgeschlagen wäre, alle
Berechnungen jedenfalls manuell ausgeführt hätten wer-
den können. Galileo hätte so nach nur einem Tag wieder
in Betrieb gehen können, eventuell vorübergehend mit
etwas verringerter Leistung.
Mehr Sicherheit für die Zukunft
Die GSA beteuerte, ein Team hätte die ganze Woche
rund um die Uhr gearbeitet, um den Service wiederher-
zustellen. Weiters sei ein unabhängiges Untersuchungs-
gremium eingerichtet worden, um zu untersuchen, was
den Vorfall verursacht hat. Dies wäre wichtig, um neue
Sicherheitsvorkehrungen für die Zukunft treffen zu kön-
nen.
WERBUNG
02 | 2019 -4-
VERANSTALTUNG
Fotos: TU Wien, Felix Zaussinger
Geo-Tag #2 an der TU Wien
Die Technische Universität Wien organisierte heuer bereits zum zweiten Mal eine
Veranstaltung, die den Bekanntheitsgrad der Geodäsie in der Öffentlichkeit steigern
soll. Dazu wurden Schulklassen, Familienmitglieder, Bekannte und allgemein Inter-
essierte an die Hochschule eingeladen. Auch der OVN trug als Sponsor zu einem
gelungenen Event bei.
GEO-WAS?
Auch heuer fand der Tag der offenen Tür am Department
für Geodäsie und Geoinformation wieder unter dem Mot-
to „GEO-WAS?“ statt. Am Freitag, dem 14. Juni 2019
lud die TU Wien zum zweiten Mal zum „GEO-Tag“ ein.
Das Event diente dazu, den Studiengang Geodäsie und
Geoinformation bekannter zu machen, Interessierte zu er-
reichen und ihnen die Möglichkeit zu bieten, einen Tag
lang in die Welt der Drohnen, Satelliten, Messrobotik,
Virtual-Reality und vielem mehr einzutauchen. Anhand
aktueller Themen wie z.B. dem Klimawandel, ging es
darum, den Zusammenhang zu unser aller Alltag her-
zustellen. Der GEO-Tag richtete sich in erster Linie an
SchülerInnen, natürlich waren aber auch Alumni, Freun- Alltag der Geodäsie
dInnen, Verwandte und alle anderen Interessierten herz-
lich willkommen. Anhand von alltäglichen Beispielen wurde spielerisch er-
02 | 2019 -5-
klärt, was Geodäsie eigentlich ist, wozu man sie braucht
und dass man im Alltag öfter auf sie zurückgreift als ge-
dacht. Das Programm setzte sich, wie letztes Jahr, aus
zwei Blöcken zusammen – einem am Vormittag und ei-
nem am Nachmittag – die vom Ablauf her ident waren
und mit einer von der Fachschaft veranstalteten Grillerei
am Messdach der TU Wien abgerundet wurden.
An diesen praxisbezogenen Stationen konnten die Be-
sucherInnen unter anderem in die Welt der Virtual- und
Augmented-Reality eintauchen, Drohnen steuern und mit
Hilfe von Laserscannern Punktwolken erstellen.
Einige dieser Stationen wurden von Mitarbeitern des De-
partments betreut, doch auch außerhalb der TU bestand
Großes Interesse an der Veranstaltung großes Interesse, sich am GEO-Tag zu beteiligen. Neben
den Gastaustellern und Sponsoren OVG, SynerGis, OVN,
Neben einem kurzen Fachvortrag zum Thema „Die Ver- MA 41 (Stadt Wien), Riegl, BEV und Leica Geosystems,
messung der Welt (mit Quasaren)“ von Prof. Johannes die uns auch letztes Jahr schon tatkräftig unterstützt
Böhm und einem Satellitenquiz mit dem Titel „Ich seh’ haben, durfte sich die TU Wien heuer über noch mehr
ich seh’ was du nicht siehst?“ von Prof. Norbert Pfei- aktive und finanzielle Unterstützung durch ALLTERRA,
fer für das jüngere Publikum, bot der GEO-Tag etliche EPOSA, Goecke Schwelm, rmData, vrvis, TeleConsult,
praktische Stationen, um einen Blick in die Welt der Ver- Skyability, GEODATA und SphereOptics freuen. Dank
messerInnen zu gewähren. dieser vielseitigen Beteiligung wurde das Event zu einem
02 | 2019 -6-
vollen Erfolg und konnte ein breites Spektrum an Einbli-
cken in die Geodäsie vermitteln.
2020 folgt Geo-Tag #3
Resümierend kann gesagt werden, dass auch der GEO-
Tag 2019, dank der mehr als 300 Gäste, motivierten Un-
terstützerInnen und einem großartigen Team, ein großer
Erfolg war und auf viel positive Resonanz gestoßen ist,
weshalb es auch 2020 einen GEO-Tag geben wird, vor-
aussichtlich wieder Ende Juni.
WERBUNG
02 | 2019 -7-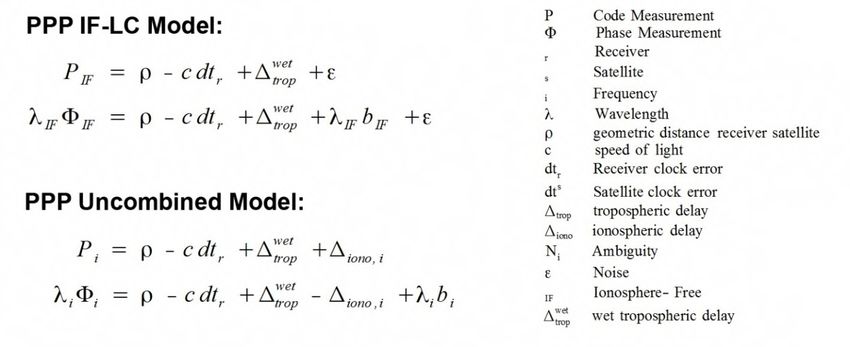
VERANSTALTUNG
7th International Colloquium on Scientific and Fundamen-
tal Aspects of GNSS / Galileo
von Bertram Arbesser-Rastburg und Robert Weber
Das Kolloquium, das von der ESA in Zusammenarbeit EoL)
mit der ETH Zürich organisiert wurde, fand von 4. - 6. • VLBI Sender (bessere Anbindung an Reference Fra-
September 2019 am ETH Campus Zürich - Hönggerberg mes)
statt. Es nahmen 193 Personen aus 25 Ländern teil. Die • Quantum-Kommunikations-Terminal (Techno De-
Veranstaltung, die seit 2007 in jedem “ungeraden” Jahr monstration für sichere Kommunikation)
stattfindet, hatte zum ersten Mal drei parallele Sessions • Neue, experimentelle Uhren (in Richtung relativisti-
am zweiten Tag. Es wurden 85 Podium Vorträge und 44 sche Navigation)
Posters präsentiert. Das Programm wurde durch die Mit- • Antenne für Space Service (mit anderer Frequenz,
glieder des GSAC (Galileo Science Advisory Committee nicht zur Erde gerichtet)
der ESA) zusammengestellt. Die Vorträge zeigten den Fortschritt, der mit der Verar-
Neben dem klassischen Kernthema “Fundamental Phy- beitung von GNSS Signalen in vielen Bereichen erreicht
sik”, das von relativistischer Positionierung bis zur Rela-
werden konnte. Die Verfügbarkeit von offenen Signalen
tivitätstheorie reichte, wurde auch ein breites Spektrum auf mehreren Frequenzen, sowie die Existenz von vier un-
an wissenschaftlichen Anwendungen und Problemstellun- abhängigen globalen Navigationssatelliten-Systemen öff-
gen präsentiert und diskutiert. Ein wesentlicher Punkt, net den Raum für eine Vielzahl von noch vor wenigen
der schon in der Expertendebatte bei der Eröffnung an- Jahren undenkbaren Innovationen – als ein Beispiel sei-
geschnitten wurde, war die Frage, welche neuen Funk- en hier die Bestrebungen der flächendeckenden GNSS-
tionen und Payloads auf der nächsten Generation von Datenaufnahme mittels Smartphones und Crowdsourcing
Galileo den größten wissenschaftlichen und gleichzeitig für die wissenschaftliche Auswertung angeführt (z.B. flä-
operationellen Wert haben. Erwähnt wurden dabei: chendeckende Messung von troposphärischem Wasser-
• Optische inter-satelliten Kommunikation (mit präziser dampf).
Ranging-Funktion) Eine Auswahl von Papers dieser Konferenz wird
• Strahlungs-, Plasma- & Gamma-Strahlen Monitor Anfang nächsten Jahres in einem Special Is-
(Space Weather Monitoring) sue des ASR Journal publiziert werden - siehe:
• Magnetometer (auch für Space Weather) https://www.journals.elsevier.com/advances-in-space-
• Accelerometer (Messung des Strahlungsdruckes) research. Auch Beiträge zum Thema, die nicht beim
• Aktiver Laser Retroreflektor (Geodäsie) Kolloquium vorgetragen wurden, werden berücksichtigt
• GNSS Empfänger (mehrere Anwendungen, auch nach - das Einreichdatum ist der 31. Januar 2020.
02 | 2019 -8-
PROJEKT
RaPPPid: Rapid Precise Point Positioning with Integer
Ambiguity Resolution
von Marcus Glaner und Robert Weber (Technische Universität Wien), Kontakt: marcus.glaner@geo.tuwien.ac.at
Kurzfassung ten der Nutzung von modernen 3-Frequenzdaten (GPS
L1/L2/L5; Galileo E1/E5/E6). Das klassische PPP Mo-
Das von der FFG im Rahmen von ASAP 13 geförder- dell, welches GPS Zwei-Frequenz-Beobachtungen und die
te Forschungsprojekt RaPPPid (Rapid Precise Point Po- Ionosphären-Freie Linear-Kombination (IF-LC) verwen-
sitioning with integer Ambiguity Resolution) hatte das det und typischerweise eine Konvergenzzeit von 20-30
Ziel, die Koordinaten-Konvergenzzeit von Precise Point Minuten aufweist, soll dadurch verbessert werden. Es
Positioning signifikant zu verkürzen (siehe Abbildung konnten höchst vielversprechende Ergebnisse für diese
1). Im Rahmen des Projektes wurden unterschiedliche untersuchten Ansätze erzielt werden und bei Projekten-
Ansätze für eine schnellere Konvergenz und ganzzahli- de kann auf eine Verkürzung ausgehend von 20 Minuten
ge Fixierung der Phasen-Mehrdeutigkeiten untersucht: zu Projektbeginn bis in einen Bereich von 5 Minuten (in
Die Nutzung präziser, regionaler Ionosphären-Karten der Ausnahmenfällen kürzer abhängig von der Satellitengeo-
ionosphärischen Signalverzögerung, das Potential einer metrie) verwiesen werden. Im Folgenden wird ein kurzer
kombinierten GPS+Galileo Lösung und die Möglichkei- Einblick in das Projekt gegeben.
Abbildung 1: Projekt-Ziel - Reduzierung der Konvergenzzeit der GNSS PPP Punktbestimmung
02 | 2019 -9-
Abbildung 2: GPS, Galileo und kombinierte GPS + Galileo PPP Lösung
Überblick PPP obachtungen erweitert. In Abbildung 2 ist eine alleini-
ge GPS-, eine alleinige Galileo- und eine GPS+Galileo-
Bei Precise Point Positioning (PPP) handelt es sich Lösung mit Verwendung der IF-LC abgebildet, wobei ein
um eine GNSS basierte präzise Einzelpunktbestimmungs- gesamter Tag prozessiert und die PPP Lösung zu je-
technik unter der Nutzung von Phasen- und Codebeob- der Stunde neu gestartet wurde. Auf diese Weise erhält
achtungen, die in den letzten 10 Jahren immer stärke- man die 24 abgebildeten einstündigen Koordinatenlösun-
ren Einzug in den verschiedensten Anwendungsbereichen gen. Wie zu erkennen ist, ähnelt sich das Konvergenz-
gefunden hat. PPP erlaubt eine absolute Punktbestim- Verhalten der GPS und Galileo Lösung. Mit der Galileo-
mung im Genauigkeitsbereich von 1 dm oder darunter only Lösung wird jedoch eine etwas geringere Koordina-
und man unterscheidet zwischen der float Lösung, bei tengenauigkeit erreicht. Dies kann an der geringeren An-
der die Mehrdeutigkeiten der Phasenbeobachtungen als zahl an beobachteten Galileo Satelliten, einer geringeren
reelle Zahlen geschätzt werden, und PPP-AR. Bei PPP Qualität der verwendeten präzisen Produkte der Satel-
with Ambiguity Resolution (PPP-AR) wird versucht die litenbahnen und Satellitenuhren für Galileo oder an den
Mehrdeutigkeiten der Phasen-Beobachtungen ganzzahlig fehlenden Receiver Phase Center Offsets und Variationen
zu schätzen. Dazu müssen die Phasen Biases, auch Un- für Galileo (als Näherung wurden GPS Werte verwen-
calibrated Phase Biases (UPDs) genannt, der Satelliten det) liegen. Aufgrund der höheren Anzahl an Beobach-
und des Receivers berücksichtigt werden. Die Receiver tungen konvergieren die Koordinaten der kombinierten
UPDs werden in unserem Ansatz durch Differenzbildung GPS+Galileo-Lösung deutlich schneller zu den Referenz-
zu einem Referenz-Satelliten eliminiert und die Satelliten
Koordinaten als jene der beiden anderen Lösungen und
UPDs durch die Verwendung von Satelliten Phase Bias es wird auch früher eine höhere Genauigkeit als bei der
Produkten korrigiert. Gelingt es mehr als 4 Mehrdeutig- alleinigen GPS oder alleinigen Galileo Lösung erreicht.
keiten ganzzahlig zu fixieren und somit eine sogenannte
fixed solution zu berechnen (siehe Abbildung 1 rechts), Abbildung 3 zeigt verschiedene PPP-AR Lösungen mit
verringert dies die Konvergenzzeit von PPP und erhöht dem Modell der IF-LC für GPS und Galileo. Dazu
die Genauigkeit der Koordinaten-Lösung. wurden die präzisen Satellitenbahnen und Satellitenuh-
ren von CNES verwendet, die eine ganzzahlige Fixie-
Vorstellung Ergebnisse rung der Phasen-Mehrdeutigkeiten ermöglichen. Man er-
kennt, dass trotz des Beobachtungsintervalls von 30sec
Zur Berechnung einer kombinierten GPS+Galileo PPP praktisch immer bereits nach 4min genügend Phasen-
Lösung wurde die institutseigene Software und das klas- Mehrdeutigkeiten zu Satelliten fixiert werden können, um
sische PPP Modell auf die Verwendung von Galileo Be- eine PPP-AR Koordinatenlösung zu berechnen. Es gibt
02 | 2019 - 10 -nur kurze Zeiträume in denen keine fixed solution be- Beobachtungen von Galileo wird auch die PPP-AR Lö-
rechnet werden kann (z.B. Galileo nach 9 Uhr). In den sung offensichtlich deutlich verbessert.
Koordinatenzeitreihen der GPS-only und der Galileo-only Zur optimalen Ausnutzung präziser Ionosphären-Modelle
Lösung sind einige falsche Mehrdeutigkeits-Fixierungen wurde das sogenannte „Uncombined Model with Ionos-
(„wrong fixes“) und Sprünge zu erkennen. Die kombinier- pheric Constraint“ implementiert. Bei diesem PPP Mo-
te GPS+Galileo Lösung liefert deutlich bessere Resulta- dell werden die Beobachtungsgleichungen der GNSS Ba-
te. Es treten deutlich weniger falsche Mehrdeutigkeits- sis Phasen- und Code-Beobachtungen verwendet und
Fixierungen auf und die Koordinaten der fixed solution die ionosphärische Laufzeitverzögerung wird geschätzt.
sind deutlich stabiler. Weiters gibt es in der kombinier- Um die Schätzung zu erleichtern, werden die aus dem
ten Lösung der beiden GNSS auch keine Zeiträume wo zu Ionosphären-Modell zu jedem Satelliten modellierten io-
wenige Phasen-Mehrdeutigkeiten für eine Koordinatenlö- nosphärischen Laufzeitverzögerungen auf der ersten Fre-
sung fixiert werden konnten. Durch die Hinzunahme der quenz (GPS L1, Galileo E1) in den Filter-Prozess als
Abbildung 3: PPP-AR unter Verwendung von GPS, Galileo und GPS + Galileo Beobachtungen
02 | 2019 - 11 -Abbildung 4: Vergleich des klassischen PPP Modells der IF-LC mit dem Uncombined Model
Pseudobeobachtungen eingeführt. Bei diesem Ansatz ist (grüne Linie). Im darunter abgebildeten Histogramm er-
es wichtig diese ionosphärischen Pseudobeobachtungen kennt man, dass sich die Differenz der ionosphärischen
im Vergleich zu den GNSS Beobachtungen korrekt zu Laufzeitverzögerung zwischen den aus dem präzisen, re-
gewichten. Im Laufe des Projektes hat sich aufgrund gionalen Ionosphären-Modell Regiomontan modellierten
der Residuen zwischen den modellierten und geschätz- Werten und den geschätzten Werten in der Größenord-
ten Werten der ionosphärischen Laufzeitverzögerung ei- nung des Code-Rauschens bewegen. Darin liegt die Be-
ne Gewichtung der ionosphärischen Pseudobeobachtun- gründung für die bereits erwähnte Gewichtung der iono-
gen in der Größenordnung der Codebeobachtungen als sphärischen Pseudobeobachtungen. In den Zeitreihen der
sinnvoll erwiesen. Beim Uncombined Model sind die Re- Koordinatendifferenz erkennt man, dass das Uncombined
ceiver Differential Code Biases (DCBs) eine unbedingt zu Model bei Vergleich mit der IF-LC vor allem zu Beginn
berücksichtigende Fehlerquelle. Diese können mit bereits der Prozessierung die Konvergenz verbessert. Der Grund
bekannten Werten korrigiert werden (z.B. aus der Schät- dafür ist, dass keine Linear-Kombination der Grundbe-
zung des Ionosphären-Modells) oder im Filter Prozess obachtungen gebildet wird, die das Rauschen der Beob-
mit geschätzt werden. Abbildung 4 bietet einen Über- achtungen erhöht, und dass durch die Verwendung der
blick über den Formelapparat des IF-LC PPP Modells ionosphärischen Pseudobeobachtungen zusätzliche Infor-
und des Uncombined Models, wobei die Receiver DCBs mation in das PPP Modell eingeführt wird. Je länger
für das Uncombined Model als bereits korrigiert ange- die Beobachtungszeiten andauern, desto geringer ist der
nommen werden. Koordinaten-Unterschied zwischen dem Modell der IF-LC
und dem Uncombined Model.
Abbildung 5 zeigt ein Beispiel für das Uncombined Model
with Ionospheric Constraint bei dem auch Beobachtun- Abbildung 6 zeigt eine Zusammenfassung der Prozes-
gen der dritten GPS und Galileo Frequenz verwendet wur- sierung von 10 IGS Stationen für den 18.August 2019.
den. Das Uncombined Model hat den großen Vorteil, dass Wieder wurde die Lösung zu jeder vollen Stunde auf
es einfach auf 2+ Frequenzen erweitert werden kann und Null gesetzt. Das Balkendiagramm zeigt für die Nord-
dass fehlende Beobachtungen (z.B. GPS L5) leicht ge- komponente, Ostkomponente und die ellipsoidische Höhe
handhabt werden können. Bei dieser Prozessierung wur- den Prozentsatz der 240 einstündigen Lösungen in denen
den die Receiver DCBs geschätzt und wie im rechten obe- sich die jeweilige Koordinatenkomponente verglichen zur
ren Teil der Abbildung 5 zu erkennen ist, schwankt diese Referenz-Koordinate zu einem gewissen Zeitraum nach
Schätzung um die vom IGS geschätzten Receiver DCBs Beginn der PPP Lösung unter einem Grenzwert (Lage-
02 | 2019 - 12 -koordinaten 0.15m, Höhe 0.30m) befindet und diesen Bereich von 5 Minuten (in Ausnahmenfällen kürzer ab-
hängig von der Satellitengeometrie) erreicht werden.
Grenzwert für den weiteren Zeitraum der jeweiligen Stun-
Nach Abschluss des Projektes wird weiterhin an der PPP
de auch nicht überschreitet. Die Abbildung verdeutlicht,
dass sowohl die Verwendung des Uncombined Model an- Software gearbeitet und an einer Verkürzung der Kon-
stelle der IF-LC, als auch die Hinzunahme von Galileo vergenzzeit und Verbesserung von PPP geforscht. Eine
Beobachtungen zu einer Reduktion der Konvergenzzeit weitere Verkürzung der Konvergenzzeit kann von Ambi-
führt. guity Resolution mit dem Uncombined Model und der
Einbindung von Glonass und BeiDou Beobachtungen er-
Zusammenfassung und Ausblick wartet werden. Durch einen geeigneten Ansatz zur De-
tektierung der falschen Mehrdeutigkeits-Fixierungen bei
Zu Projektende konnte durch die hier vorgestellten An- PPP-AR sollte es möglich sein die Stabilität der Lösung
sätze eine Reduzierung der Konvergenzzeit bis in einen weiter zu verbessern.
Abbildung 5: Beispiel einer GPS + Galileo Prozessierung mit dem Uncombined Model with Ionospheric Constraint und
Vergleich mit den Koordinaten der GPS + Galileo IF-LC Prozessierung
02 | 2019 - 13 -Abbildung 6: Prozessierung von 10 IGS Stationen mit verschiedenen PPP Modellen Es kann davon ausgegangen werden, dass PPP in we- steigert werden. Auch im hochgenauen Sektor (Positio- nigen Jahren die am meisten eingesetzte Punktbestim- nierung besser als +/-3cm) beginnt sich PPP durchzu- mungsmethode mittels GNSS darstellen wird. Der große setzen. Dies liegt vor allem an der gleichzeitigen Nutzung Vorteil liegt nicht zuletzt in der Möglichkeit ohne weitere von mehreren GNSS, mehreren Signalen und der somit terrestrische Netzanforderungen für den Nutzer GNSS- möglichen Reduktion der Koordinatenkonvergenzzeit die Korrekturdaten z.B. mittels Satelliten zu empfangen und in wenigen Jahren wohl im 1 Minutenbereich liegen wird im Rover direkt zu verwerten. Bereits heute werden rund und so mit Netzwerkkonzepten (RTK) vehement konkur- 20% der Positionierungen mittel PPP erreicht. Durch rieren wird. Regionale Netze werden aber weiterhin durch Nutzung des 2020 in Betrieb gehenden Galileo CS HA- Bereitstellung hochpräziser regionaler Troposphären- und Dientes (HAS) wird dieser Prozentsatz noch deutlich ge- Ionosphären-Information die PPP Lösung stützen. 02 | 2019 - 14 -
TAGUNG
Foto: https://www.flickr.com/photos/chiemseehotel/5203189821
AHORN 2019: 11. - 12. Dezember in Bernau am Chiemsee
Die Deutsche Gesellschaft für Ortung und Navigation (DGON) organisiert in Zu-
sammenarbeit mit dem Schweizerischen Institut für Navigation (ION-CH) und dem
Österreichischen Verein für Navigation (OVN) am 11. und 12. Dezember 2019 in
Bernau am Chiemsee die Dreiländertagung AHORN - Der Alpenraum und seine Her-
ausforderungen im Bereich Orientierung, Navigation und Informationsaustausch.
Die AHORN findet dieses Jahr in Bernau am Chiemsee Tagungsziele
in Bayern in Deutschland statt. Der Luftkurort liegt im Hintergrund der Tagung sind die Technologien der Po-
Chiemgau am Südwestufer des Chiemsees. Als Tagungs- sitionierung, Navigation, Erdbeobachtung und Kommu-
ort wurde das Hotel Seiserhof, ein Familienbetrieb mit nikation und die sich daraus ergebenden Anwendungsge-
Blick auf den Chiemsee, gewählt http://www.seiserhof. biete im alpinen Gelände. Der wesentliche Schwerpunkt
de/. Kostenfreie Parkplätze und WLAN sind im Zimmer- dieser Tagung ist die Zusammenführung von Know-
preis inkludiert. how-Trägern, Entwicklern und Nutzern von Navigations-,
Erdbeobachtungs- und Kommunikationstechnologien mit
dem Ziel, spezifische Probleme des Alpenraums besser
lösen zu können.
Themenbereiche
Die Themenbereiche der AHORN 2019 umfassen in ers-
ter Linie folgende Anwendungsgebiete von Navigations-,
Erdbeobachtungs- und Kommunikationstechnologien im
Alpenraum:
• Such- und Rettungsdienste (Vermisstensuche, Ber-
gung von Alpinopfern, Notrufdienste)
• Katastrophenschutz (Wildbach- und Lawinenverbau-
02 | 2019 - 15 -ung) • Organisation/Firma
• Ortung und Leitung von Flugbewegungen • Postanschrift
• Klimawandel in den Alpen • Telefon und Fax-Nummer
• Aufbau und Überwachung von Seilbahnanlagen • Email-Adresse
• Schneeräumung und Wartung alpiner Straßen • Nicht mehr als 500 Wörter (exklusive Referenzen und
• Anlage und Präparierung von Wintersportanlagen Abbildungen)
• Tourismus (Schitouren, Wanderungen)
• Verkehr und Mobilität im Alpenraum Autoren zugelassener Beiträge werden bis 04. November
• Diverse Applikationen 2019 unterrichtet.
Ziel ist die wissenschaftliche Behandlung des Themenbe- Tagungssprache
reichs sowie die Vorstellung praktischer Anwendungsbe- Die Tagungssprache ist Deutsch. Vorträge in Englisch
reiche im Rahmen von Referenz- bzw. Pilotprojekten. Die sind möglich.
Tagung soll eine interessante Mischung aus theoretischen
und praktischen Beiträgen bieten. Programm Komitee
Stefan Baumann (IABG/DGON Vorsitz), Wolfgang In-
Vorträge ninger (Frauenhofer IML), Bertram Arbesser-Rastburg
Der Call for Papers ist bis zum 27. September 2019 (OVN), Urs Wild (ION-CH).
geöffnet. Einzureichen ist eine Kurzfassung (1/2 Seite
DIN A4) des Tagungsbeitrages in elektronischer Form
(FÖRDERUNG
Studierendenförderung des OVN (ENC und AHORN)
Im Rahmen der OVN Nachwuchsförderung unterstützt der Österreichische Verein
für Navigation die Teilnahme von jungen österreichischen Wissenschaftlern an der
AHORN Tagung und an der European Navigation Conference (ENC). Die Ausschrei-
bung richtet sich an Studierende, die vorhaben, einen Tagungsbeitrag bei einer der
beiden genannten Konferenzen zu leisten.
Die AHORN 2019 tagt vom 11. bis 12. Dezember 2019 kalaureat, Master, PhD) an einer österreichischen
in Bernau am Chiemsee in Bayern. Die Bewerbungs- Hochschule inskribiert sind.
frist für die Ahorn endet am 11. November 2019. Die 4. Die Bewerbungsunterlagen sind schriftlich spätestens
ENC 2020 findet von 11. bis 14. Mai 2020 in Dresden einen Monat vor Tagungsbeginn an den Präsidenten
in Deutschland statt. Für eine Bewerbung sind folgende des Österreichischen Vereins für Navigation zu über-
Unterlagen nötig: Bewerbungs- bzw. Motivationsschrei- mitteln und müssen folgende Informationen enthalten:
ben, Inskriptionsbestätigung, Bestätigung vom Konfe-
renzveranstalter, dass das Paper oder die Präsentation (a) Bewerbungs- bzw. Motivationsschreiben,
des Antragstellers akzeptiert wurde, sowie ein Kosten- (b) Inskriptionsbestätigung
voranschlag für die Tagungsteilnahme. Diese Unterlagen (c) Bestätigung vom Konferenzveranstalter, dass das
bitte an bertram@arbesser.org übermitteln. Paper oder die Präsentation des Antragstellers ak-
Die Richtlinien für eine Studierendenförderung lauten wie zeptiert wurde, sowie
folgt: (d) Kostenvoranschlag für die Tagungsteilnahme
5. Die Auszahlung der Förderung ist an einen Bericht
1. Der Fördertopf für die Teilnahme an der European über die Teilnahme im Navigation Flashlight (E-Mail
Satellite Navigation Conference ist mit jährlich 2.000 Newsletter) und an eine OVN Mitgliedschaft (derzei-
Euro dotiert, wobei die Höhe der Förderung pro An- tige Kosten für Studenten 10 Euro/Jahr) gebunden.
trag max. 1.000 Euro beträgt. 6. Die Auszahlung erfolgt erst nach Ablieferung des
2. Der Fördertopf für die Teilnahme an der AHORN Ta- Berichts sowie der Vorlage einer Teilnahmebestäti-
gung ist mit jährlich 1.000 Euro dotiert, wobei die gung und einer Reisekostenabrechnung (Originalbele-
Höhe der Förderung pro Antrag max. 500 Euro be- ge). Ein gemeinsamer Bericht von allen geförderten
trägt. Teilnehmern ist dabei ausreichend.
3. Die Fördertöpfe stehen ausschließlich Studierenden 7. Falls die volle Fördersumme nicht ausgeschöpft wird,
zur Verfügung, die als ordentliche Studierende (Bak- verfällt der Restbetrag.
WERBUNG
02 | 2019 - 17 -EVENTS
Veranstaltungshinweise
21. - 25. Oktober 2019
70th International Astronautical Congress (IAC)
Washington, D.C., USA
https://www.iac2019.org/
21. - 25. Oktober 2019
ITS World Conress 2019
Suntec City, Singapore
https://itsworldcongress2019.com/
29. Oktober - 01. November 2019
37th International Communications Satellite Systems
Conference
Okinawa, Japan
http://www.kaconf.org/
04. - 07. November 2019
International Timing and Sync Forum 2019
Brighton, Großbritannien
http://itsf2019.executiveindustryevents.com/Event/#home
12. November 2019
13. Navigations Get-Together
Technische Universität Wien
Thema: PPP und Galileo CS-HAS
08. - 09. November 2019
GSA Open Days 2019
Prag, Tschechische Republik
https://www.gsa.europa.eu/2018-gsa-open-days
18. - 21. November 2019
70th International Navigation Conference (INC)
Edinburgh, Schottland
https://rin.org.uk/events/EventDetails.aspx?id=1135239&
group=
02 | 2019 - 18 -18. November 2019
Training Short Course Securing Positioning & Timing
Edinburgh, Schottland
https://rin.org.uk/event/securing_pnt_training
09. - 13. Dezember 2019
American Geophysical Union (AGU) General Assembly
San Francisco, Kalifornien, USA
https://www2.agu.org/fall-meeting
11. - 12. Dezember 2019
AHORN 2019
Bernau am Chiemsee, Deutschland
https://www.dgon-ahorn.org
07. - 09. April 2020
Geospatial World Forum 2020
Amsterdam, Niederlande
https://geospatialworldforum.org/
03. - 08. Mai 2020
European Geosciences Union General Assembly 2020
(EGU)
Wien, Österreich
https://www.egu2020.eu/
11. - 14. Mai 2020
European Navigation Conference 2020 (ENC)
Dresden, Deutschland
https://www.enc2020.eu/
21. - 25. September 2020
ION GNSS+ 2020
St. Louis, Missouri, USA
https://www.ion.org/gnss/
02 | 2019 - 19 -AUSSCHREIBUNGEN Ausschreibungen im Bereich GNSS Momentan sind die folgenden Ausschreibungen im Bereich GNSS geöffnet: Ausschreibungen der GSA: Wir möchten Sie auf die laufenden Stellenausschreibungen der GSA aufmerksam machen. Diese finden Sie unter https://www.gsa.europa.eu/gsa/jobs-opportunities und Traineeships unter https://www.gsa.europa.eu/traineeship- listing. GSA/2019/111: GSA/TR/COM/2019-2020: Programme Configuration Officer (AD 5) Traineeship in Communications (Traineeship) Deadline 07. Oktober 2019 Deadline 30. Juni 2020 GSA/TR/HR/2019-2020: GSA/TR/FIN/2019-2020: Human Resources Department Traineeship Finance Department Traineeship (Traineeship) (Traineeship) Deadline 30. Juni 2020 Deadline 30. Juni 2020 Ausschreibungen der ESA: Wir möchten Sie auf die laufenden Projektausschreibungen der ESA aufmerksam machen. Informationen dazu finden Sie unter EMITS: http://emits.sso.esa.int/emits/owa/emits.main H2020-ESA-031: H2020-ESA-044: Advanced ODTS algorithms test platform and EGNOS evolutions system engineering (Phase experimentation (INTENDED) 0) (INTENDED) EXPRO+NAVISP ELEMENT 1 (NAVISP-EL1-015): H2020-ESA-035: Feasibility study of a space-based relativistic Assessment of system improvements aligned PNT system - re-issue (ISSUED) to new EGNOS mission needs (INTENDED) H2020-ESA-033: H2020-ESA-036: Antenna and transponder unit for underwater Feasibility analysis of ARAIM ISM generation PNT - EXPRO+ (ISSUED) by EGNOS (INTENDED) 02 | 2019 - 20 -
GALILEO Satellites Transition Batch: H2020-ESA-027:
Phase 1 and Phase 2 (ISSUED) C-Band advanced receiver (INTENDED)
NAVISP ELEMENT 1 (NAVISP-EL1-016):
GNSS/Non-GNSS sensor fusion for resilience in
high-integrity aviation applications - Re-Issue
(INITIATED)
WERBUNG
We are the
Navigation experts
FIELD OF WORK FIELD OF EXPERTISE
Enhanced and precise positioning User and technical requirements analysis
(SBAS, D-GNSS, PPP, RTK) System architecture definition and design
Reliable navigation (sensor fusion with INS/IMU, Software development and testing
camera information) App development and mobile computing
Development of GNSS based solutions and combina- Project preparation and management
tion of navigation, telecommunication and information Telematics and technical consultancy
technologies Business development
Location based services for emergency General management support
response, transport and mobility applications
SELECTED PRODUCTS
Location Based Services GNSS Processing
MCGS MODIS SARONTAR GIDAS GIPSIE MGSE
Multipurpose Cooperative Mobility Services Search & Rescue in GNSS Interference Detection GNSS multisystem perfor- Multi-GNSS Simulation &
GNSS Service for Generations wilderness environments & Analysis System mance sim. environment Test Environment
T e l e C o n s u l t Au s t r i a G m b H
Tel.: +43-316-890971-0
WWW.TCA.AT E-Mail: info@tca.at
02 | 2019 - 21 -Sie können auch lesen