Anwendungshandbuch EtherNet/IP Scanner/Adapter
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
ROBOTICS Anwendungshandbuch EtherNet/IP Scanner/Adapter
Trace back information: Workspace 21A version a10 Checked in 2021-03-16 Skribenta version 5.4.005
Anwendungshandbuch
EtherNet/IP Scanner/Adapter
RobotWare 7.2
Dokumentnr: 3HAC066565-003
Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.
Spezifikationen können ohne vorherige Ankündigung geändert werden.Die Informationen in diesem Handbuch können ohne vorherige Ankündigung geändert
werden und stellen keine Verpflichtung von ABB dar. ABB übernimmt keinerlei
Verantwortung für etwaige Fehler, die dieses Handbuch enthalten kann.
Wenn nicht ausdrücklich in vorliegendem Handbuch angegeben, gibt ABB für keine
hierin enthaltenen Informationen Sachmängelhaftung oder Gewährleistung für
Verluste, Personen- oder Sachschäden, Verwendbarkeit für einen bestimmten Zweck
oder Ähnliches.
In keinem Fall kann ABB haftbar gemacht werden für Schäden oder Folgeschäden,
die sich aus der Anwendung dieses Dokuments oder der darin beschriebenen
Produkte ergeben.
Dieses Handbuch darf weder ganz noch teilweise ohne vorherige schriftliche
Genehmigung von ABB vervielfältigt oder kopiert werden.
Zur späteren Verwendung aufbewahren.
Zusätzliche Kopien dieses Handbuchs können von ABB bezogen werden.
Übersetzung der Originalbetriebsanleitung.
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.
Spezifikationen können ohne vorherige Ankündigung geändert werden.Inhaltsverzeichnis
Inhaltsverzeichnis
Überblick über dieses Handbuch ..................................................................................................... 7
Produktdokumentation ..................................................................................................................... 9
Sicherheit .......................................................................................................................................... 11
Netzwerksicherheit ........................................................................................................................... 12
Terminologie ..................................................................................................................................... 13
1 Einleitung 15
1.1 Was ist EtherNet/IP? .......................................................................................... 15
1.2 EtherNet/IP für OmniCore ................................................................................... 16
2 Hardwareübersicht 17
2.1 Netzwerkverbindungen am OmniCore ................................................................... 17
2.2 Ethernet-Switch ................................................................................................ 22
2.3 E/A-Geräte ....................................................................................................... 23
3 Software-Übersicht 25
3.1 Informationen über das Adapter-Gerät .................................................................. 25
3.2 Informationen über den internen Scanner .............................................................. 27
4 Installieren und Konfigurieren des internen Adapter-Geräts 29
4.1 Empfohlene Vorgehensweise: ............................................................................. 29
4.2 Konfigurieren der EtherNet/IP-Netzwerkeinstellungen .............................................. 30
4.3 Konfigurieren des internen Adapter-Geräts ............................................................ 31
5 Installieren und Konfigurieren des internen Scanners 33
5.1 Empfohlene Vorgehensweise: ............................................................................. 33
5.2 Erstellen und Konfigurieren des internen Scanners ................................................. 34
5.2.1 Verwendung von EDS-Dateien zur Erstellung von Gerätevorlagen .................... 37
5.3 Explicit Messaging-Dienste ................................................................................. 39
5.3.1 Information ............................................................................................ 39
5.3.2 EtherNet/IP-Befehl bei Inbetriebnahme ........................................................ 42
5.3.3 EtherNet/IP-Befehl über RAPID .................................................................. 43
5.4 QuickConnect ................................................................................................... 45
5.5 Kommunikation zwischen zwei OmniCore-Steuerungen ........................................... 48
6 Systemparameter 51
6.1 Einleitung ........................................................................................................ 51
6.1.1 EtherNet/IP system parameters ................................................................. 52
6.2 Type Ethernet/IP Network ................................................................................... 54
6.2.1 Der Typ EtherNet/IP Network ..................................................................... 54
6.2.2 Name .................................................................................................... 55
6.2.3 Identification Label .................................................................................. 56
6.2.4 Simulated .............................................................................................. 57
6.3 Type Ethernet/IP Device ..................................................................................... 58
6.3.1 Name .................................................................................................... 58
6.3.2 Connected to Industrial Network ................................................................ 59
6.3.3 State when System Startup ....................................................................... 60
6.3.4 Trust Level ............................................................................................. 61
6.3.5 Simulated .............................................................................................. 62
6.3.6 Vendor Name ......................................................................................... 63
6.3.7 Product Name ........................................................................................ 64
6.3.8 Identification Label .................................................................................. 65
6.3.9 Address ................................................................................................. 66
6.3.10 Vendor ID .............................................................................................. 67
6.3.11 Device Type ........................................................................................... 68
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 5
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Inhaltsverzeichnis
6.3.12 Product Code ......................................................................................... 69
6.3.13 QuickConnect ......................................................................................... 70
6.3.14 Output Assembly .................................................................................... 72
6.3.15 Input Assembly ....................................................................................... 73
6.3.16 Input Size .............................................................................................. 74
6.3.17 Output Size ............................................................................................ 75
6.3.18 Configuration Assembly ........................................................................... 76
6.3.19 Ownership ............................................................................................. 77
6.3.20 Input Connection Type ............................................................................. 78
6.3.21 Connection Priority .................................................................................. 79
6.3.22 Output RPI ............................................................................................. 80
6.3.23 Input RPI ............................................................................................... 81
6.3.24 Connection Timeout Multiplier ................................................................... 82
6.4 Type EtherNet/IP Command ................................................................................ 83
6.4.1 Name .................................................................................................... 83
6.4.2 Device ................................................................................................... 84
6.4.3 Identification Label .................................................................................. 85
6.4.4 Download Order ...................................................................................... 86
6.4.5 Path ...................................................................................................... 87
6.4.6 Service .................................................................................................. 88
6.4.7 Value .................................................................................................... 89
6.5 Type EtherNet/IP Internal Device .......................................................................... 90
6.5.1 Name .................................................................................................... 90
6.5.2 Connected to Industrial Network ................................................................ 91
6.5.3 Identification Label .................................................................................. 92
6.5.4 Connection Input Size .............................................................................. 93
6.5.5 Connection Output Size ............................................................................ 94
7 Fehlerbehebung 95
7.1 Häufig gestellte Fragen ...................................................................................... 95
7.2 Fehlerbehebung ................................................................................................ 96
Index 97
6 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Überblick über dieses Handbuch
Überblick über dieses Handbuch
Über dieses Handbuch
Dieses Handbuch beschreibt die folgenden Optionen und umfasst Anweisungen
über ihre Konfiguration in einem OmniCore-System.
• EtherNet/IP Scanner, Option Nummer 3024-1
• EtherNet/IP Adapter, Option Nummer 3024-2
Verwendung
Verwenden Sie dieses Handbuch während der Installation und Konfiguration des
EtherNet/IP Scanner/Adapter und während der Aktualisierung der Option
EtherNet/IP Scanner/Adapter.
Wer sollte dieses Handbuch lesen?
Dieses Handbuch richtet sich an:
• Personal, das für Installationen und Konfigurationen von Hardware/Software
des industriellen Netzwerks zuständig ist
• Personal, das für die E/A-Systemkonfiguration zuständig ist
• Systemintegratoren
Voraussetzungen
Der Leser muss die erforderlichen Kenntnisse zu folgenden Themen besitzen:
• Mechanische Installationsarbeiten
• Elektrische Installationsarbeiten
• Systemparameter und ihre Konfiguration
• RobotStudio
Referenzen
Dokumentreferenzen
Referenz Dokumentnummer
Bedienungsanleitung - RobotStudio 3HAC032104-003
Bedienungsanleitung - OmniCore 3HAC065036-003
Produkthandbuch - OmniCore C30 3HAC060860-003
Technisches Referenzhandbuch - Systemparameter 3HAC065041-003
Technisches Referenzhandbuch - RAPID Instruktionen, 3HAC065038-003
Funktionen und Datentypen
Anwendungshandbuch - DeviceNet-Master/Slave 3HAC066562-003
Anwendungshandbuch - Steuerungssoftware OmniCore 3HAC066554-003
Produktspezifikation - OmniCore C line 3HAC065034-003
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 7
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Überblick über dieses Handbuch
Fortsetzung
Weitere Referenzen
Referenz Beschreibung
www.odva.org Die Website von ODVA (Open DeviceNet Vendor
Association).
EtherNet/IP TM Specification, Edition 1.2 Die ODVA-Spezifikation umfasst zwei Bände aus
der Bibliothek: Volume One: Common Industrial
Protocol (CIP) Specification und Volume Two:
EtherNet/IP Adaptation of CIP.
Revisionen
Revision Beschreibung
A Veröffentlicht mit RobotWare 7.0.
B Veröffentlicht mit RobotWare 7.0.1.
• Cfg-Name aus dem gesamten Handbuch entfernt.
• Informationen zu Multiplikator Timeout wurde in Abschnitt Output RPI
auf Seite 80 und Input RPI auf Seite 81 hinzugefügt.
C Veröffentlicht mit RobotWare 7.1.
• HINWEIS zu IP-Adressen hinzugefügt in Abschnitt Erstellen und
Konfigurieren des internen Scanners auf Seite 34.
D Veröffentlicht mit RobotWare 7.2.
• Lokale E/A an den relevanten Stellen ersetzt durch skalierbare E/A.
• Informationen zum Standard-Gateway-Feld entfernt aus Abschnitt
Häufig gestellte Fragen auf Seite 95.
• Geringfügige Korrekturen in Abschnitt Anschlüsse am Hauptcomputer
auf Seite 18.
8 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Produktdokumentation
Produktdokumentation
Kategorien für Anwenderdokumentation von ABB Robotics
Die Anwenderdokumentation von ABB Robotics ist in mehrere Kategorien unterteilt.
Die Liste beruht auf der Informationsart in den Dokumenten, unabhängig davon,
ob es sich um Standardprodukte oder optionale Produkte handelt.
Tipp
Sie finden alle Dokumente über das myABB-Unternehmensportal
www.abb.com/myABB.
Produkthandbücher
Manipulatoren, Steuerungen, DressPack/SpotPack und die meiste andere Hardware
werden mit einem Produkthandbuch geliefert, das Folgendes enthält:
• Sicherheitsinformationen.
• Installation und Inbetriebnahme (Beschreibung der mechanischen Installation
und der elektrischen Anschlüsse).
• Wartung (Beschreibung aller erforderlichen vorbeugenden
Wartungsmaßnahmen einschließlich der entsprechenden Intervalle und der
Lebensdauer der Teile).
• Reparatur (Beschreibung aller empfohlenen Reparaturvorgänge,
einschließlich des Austauschs von Ersatzteilen).
• Kalibrierung.
• Stilllegung.
• Referenzinformation (Sicherheitsstandards, Einheitenumrechnung,
Schraubverbindungen, Werkzeuglisten).
• Ersatzteilliste mit den entsprechenden Abbildungen (oder Referenzen zu
separaten Ersatzteillisten).
• Referenzen zu den Schaltplänen.
Technische Referenzhandbücher
In den technischen Referenzhandbüchern werden die Referenzinformationen für
Robotics-Produkte, wie Schmierung, RAPID-Sprache und Systemparameter,
beschrieben.
Anwendungshandbücher
Bestimmte Anwendungen (z. B. Software- oder Hardware-Optionen) werden in
Anwendungshandbüchern beschrieben. Ein Anwendungshandbuch kann eine
oder mehrere Anwendungen beschreiben.
Ein Anwendungshandbuch enthält im Allgemeinen folgende Informationen:
• Zweck der Anwendung (Aufgabe und Nutzen).
• Enthaltenes Material (z. B. Kabel, E/A-Karten, RAPID-Instruktionen,
Systemparameter, Software)
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 9
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Produktdokumentation
Fortsetzung
• Installieren von enthaltener oder erforderlicher Hardware.
• Bedienungsanleitung für die Anwendung.
• Beispiele für die Verwendung der Anwendung.
Bedienungsanleitungen
In den Bedienungsanleitungen wird die Handhabung der Produkte in der Praxis
beschrieben. Diese Handbücher richten sich an die Personen, die direkten
Bedienungskontakt mit dem Produkt haben, also Bediener der Produktionszelle,
Programmierer und Wartungsmitarbeiter.
10 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Sicherheit
Sicherheit
Sicherheitsbestimmungen
Bevor Sie mechanische und/oder elektrische Installationen ausführen, müssen
Sie sich unbedingt mit den Sicherheitsbestimmungen in den Produkthandbüchern
für den Roboter vertraut machen.
Der Integrator des Robotersystems ist für die Sicherheit des Robotersystems
verantwortlich.
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 11
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Netzwerksicherheit
Netzwerksicherheit
Netzwerksicherheit
Dieses Produkt wurde zum Anschluss an eine Netzwerkschnittstelle und zur
Kommunikation von Informationen und Daten über diese Netzwerkschnittstelle
entwickelt. Es liegt in Ihrer alleinigen Verantwortung, eine sichere Verbindung
zwischen dem Produkt und Ihrem Netzwerk oder (gegebenenfalls) einem anderen
Netzwerk herzustellen und regelmäßig zu überprüfen.
Sie müssen geeignete Maßnahmen (beispielsweise Installieren von Firewalls,
Einsetzen von Authentifizierungsmaßnahmen, Datenverschlüsselung, Installieren
von Anti-Viren-Programmen etc.) zum Schutz des Produkts, des Netzwerks, seines
Systems und der Schnittstelle gegen alle Arten von Sicherheitsverletzungen,
unautorisiertem Zugriff, Störungen, Eindringversuchen, Informationslecks und/oder
Raub von Daten oder Informationen treffen. ABB Ltd und angeschlossene
Unternehmen haften nicht für Schäden und/oder Verluste in Verbindung mit
Sicherheitsverletzungen, unautorisiertem Zugriff, Störungen, Eindringversuchen,
Informationslecks und/oder Raub von Daten oder Informationen.
12 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Terminologie
Terminologie
Begriffe
Begriff Erklärung
Adapter Von Scanner in einem Ethernet-Netzwerk kontrolliertes
E/A-Gerät. In Dokumentation von ABB wurde früher
der Begriff Slave verwendet.
CIP Common Industrial Protocol.
Protokoll auf dem DeviceNet und EtherNet/IP basieren.
Client Siehe Scanner.
In einigen Dokumenten wird der Begriff Client verwen-
det, während die Dokumentation des Herstellers ABB
den Begriff Scanner für industrielle Ethernet/IP-Netz-
werke verwendet.
EDS Electronic Data Sheet.
In EDS-Dateien sind die für CIP-Geräte wichtigen
Konfigurationsdetails enthalten.
Explicit Messaging Eine expilizite Meldung ist die anforderungs- oder re-
aktionsorientierte Kommunikation mit anderen Gerä-
ten. Diese Meldungen sind hauptsächlich Konfigurati-
onsdaten.
Externer Adapter Beschreibt einen EtherNet/IP-Adapter, der im Ether-
Net/IP-Netzwerk mit der OmniCore-Steuerung verbun-
den ist (nicht die Roboter-Steuerung, die als Ether-
Net/IP-Adapter fungiert).
Externer Scanner Beschreibt einen EtherNet/IP-Scanner, der im Ether-
Net/IP-Netzwerk mit der OmniCore-Steuerung verbun-
den ist (nicht die Roboter-Steuerung, die als Ether-
Net/IP-Scanner fungiert).
Implicit Messaging Implizierte Meldungen werden zwischen E/A-Anschlüs-
sen ausgetauscht. Die Meldungsdaten enthalten keine
Meldungsprotokolle, anders als beim Explicit Messa-
ging. Implizierte Meldungen können direkt ("unicast")
oder "multicast" sein und übertragen gerätespezifische
E/A-Daten.
Interner Adapter Beschreibt die Roboter-Steuerung, die im EtherNet/IP-
Netzwerk als EtherNet/IP-Adapter fungiert.
Interner Scanner Beschreibt die Roboter-Steuerung, die im EtherNet/IP-
Netzwerk als EtherNet/IP-Scanner fungiert.
LAN Steckverbinder für lokales Netzwerk.
M12 Ethernet-Kontakt mit IP67-Klassifizierung.
Master Siehe Begriff Scanner.
ODVA Open DeviceNet Vendor Association.
Organisation CIP-basierter Netzwerke, zum Beispiel
DeviceNet und EtherNet/IP.
RJ45 Standard-Ethernet-Kontakt.
Scanner Steuert andere E/A-Geräte (Adapter) in einem Ether-
net-Netzwerk. In Dokumentation von ABB wurde früher
der Begriff Master verwendet.
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 13
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Terminologie
Fortsetzung
Begriff Erklärung
Server Siehe Begriff Adapter.
In einigen Dokumenten wird der Begriff Server verwen-
det, während die Dokumentation des Herstellers ABB
den Begriff Adapter für industrielle Ethernet/IP-Netz-
werke verwendet.
Slave Siehe Begriff Adapter.
WAN Port für Weitverkehrsnetzwerk.
14 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.1 Einleitung
1.1 Was ist EtherNet/IP?
1 Einleitung
1.1 Was ist EtherNet/IP?
Allgemeines
EtherNet/IP ist eine Kommunikationsverbindung für Industriegeräte.
EtherNet/IP (EtherNet Industrial Protocol) wird von ODVA (Open DeviceNet Vendor
Association) verwaltet. Es handelt sich um ein etabliertes
Ethernet-Kommunikationssystem mit guten Echtzeitfähigkeiten. EtherNet/IP
erweitert kommerzielles serienmäßiges Ethernet um das (Common Industrial
Protocol) – das gleiche Upper Layer Protocol und Objektmodell, das in DeviceNet
und ControlNet zu finden ist. CIP ermöglicht es EtherNet/IP und
DeviceNet-Systemintegratoren und -Benutzern, die gleichen Objekte und Profile
zur Plug-and-Play-Interoperabilität zwischen Geräten verschiedener Hersteller in
verschiedenen Subnetzen anzuwenden. Combined, DeviceNet, ControlNet und
EtherNet/IP fördern die Transparenz der Sensoren zur Unternehmenssoftware.
Anwendungsbeispiele
Hier einige Beispiele für EtherNet/IP-Anwendungen:
• Peer-to-Peer-Datenaustausch, wobei ein EtherNet/IP-Produkt Meldungen
erstellen und nutzen kann
• Scanner/Adapter-Betrieb, definiert als eigenes Punkt-zu-Punkt-Element
• Ein EtherNet/IP-Produkt kann als Client, Server oder beides funktionieren
Standardisierung
EtherNet/IP ist gemäß der internationalen Norm IEC 61158 standardisiert, und
EtherNet/IP-Geräte sind von ODVA für Interoperabilität und Konformität zertifiziert.
Daten
Die folgende Tabelle enthält einige EtherNet/IP-Daten.
Netzwerktyp Ethernet basierend auf einem Netzwerk auf Kontrollebene mit CIP-
Anwendungsprotokoll
Installation Serienmäßige (COTS) Standard-Ethernetkabel und Anschlüsse
10/100/1000 Mbit/s TX-Ethernetkabel oder Glasfaser.
RJ45, M12 oder Glasfaseranschlüsse.
Geschwindigkeit 10, 100, 1000 Mbit/s
EDS-Datei
Der Konfigurationsvorgang basiert auf EDS (Electronic Data Sheet)-Dateien, die
für jedes EtherNet/IP-Gerät erforderlich sind. EDS-Dateien werden von den
Geräteherstellern bereitgestellt. Sie enthalten elektronische Beschreibungen aller
relevanten Kommunikationsparameter und -objekte des jeweiligen
EtherNet/IP-Geräts.
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 15
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.1 Einleitung
1.2 EtherNet/IP für OmniCore
1.2 EtherNet/IP für OmniCore
Allgemeines
Das EtherNet/IP-Netzwerk läuft auf dem OmniCore-Hauptcomputer und erfordert
keine zusätzliche Hardware. EtherNet/IP, wie in diesem Handbuch beschrieben,
erfordert den Hauptcomputer DSQC1025.
Optionen
Mit der Option 3024-1 EtherNet/IP Scanner kann die OmniCore-Steuerung als Gerät
auf dem EtherNet/IP-Netzwerk dienen.
Mit der Option 3024-2 EtherNet/IP Adapter kann die OmniCore-Steuerung nur als
Adapter dienen.
Hinweis
In diesem Handbuch ist der 3024-2 EtherNet/IP Adapter als internes Gerät
bezeichnet.
Spezifikationsübersicht
Einheit Spezifikation
Industrieller Netzwerktyp EtherNet/IP
Entspricht EtherNet/IP Protokollkonformitätstest A-9
Datenrate 10/100 Mbit
Anschlusstyp Cyclic
Anschlussgröße Maximal 509 Input-Bytes und 505 Output-Bytes
Transportklasse Klasse 1 E/A implizit
16 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.2 Hardwareübersicht
2.1 Netzwerkverbindungen am OmniCore
2 Hardwareübersicht
2.1 Netzwerkverbindungen am OmniCore
Verbindungen an den der OmniCore-Steuerung
Die folgende Abbildung zeigt die verfügbaren Ethernet-Portanschlüsse an der
Steuerung.
Hinweis
Informationen zur Lage der Ethernet-Portanschlüsse finden Sie im
Produkthandbuch für die entsprechende OmniCore-Steuerung.
1 1 2 3 1 4
xx1800003138
Schild Beschreibung
1 I/O + LAN + ETHERNET Port zum privaten Netzwerk des Roboters. Dieser
SWITCH ist für die Verbindung der lokale E/A-Geräte von
ABB und die netzwerkbasierten Prozessgeräte mit
der Steuerung vorgesehen.
2 ABB Ability™ Dieser Port existiert nur beim Einsatz der verkabel-
ten Variante des Connected-Services-Gateway. Er
ist zum Anschluss des Ability™-Netzwerks des
Roboters ausgelegt.
3 WAN Der WAN-Port kann ein öffentliches industrielles
Netzwerk hosten.
4 MGMT (Management) Port zum privaten Netzwerk des Roboters. Der
MGMT-Port sollte vom Servicepersonal in der Nähe
zur Steuerung verwendet werden, wobei ein einzel-
ner Client mit der Steuerung verbunden ist.
Hinweis
Der Management-Port sollte niemals für mehr als
einen Client gleichzeitig verwendet werden. ABB
Robotics übernimmt keine Verantwortung für Feh-
ler/Gefahren, die entstehen, wenn mehr als ein Cli-
ent mit dem Management-Port verbunden ist.
Ein betriebsweites E/A-Netzwerk sollte am WAN-Ethernet-Port an der Steuerung
angeschlossen sein.
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 17
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.2 Hardwareübersicht
2.1 Netzwerkverbindungen am OmniCore
Fortsetzung
Ein lokales E/A-Netzwerk für einen spezifischen Roboter sollte am
LAN-Ethernet-Port, an E/A oder am ETHERNET SWITCH der Steuerung
angeschlossen sein.
Hinweis
Die Verbindung mehrerer Ports der OmniCore-Steuerung mit dem gleichen
externen Switch wird nicht unterstützt, es sei denn, Sie legen eine statische
VLAN-Trennung am externen Switch an.
Anschlüsse am Hauptcomputer
Die Ethernet-Ports am Hauptcomputer gehören zu den folgenden
Netzwerksegmenten:
Network segment Private Network Ability Network Public Network Drive Network
10/100/1000
10/100/1000
10/100
10/100
10/100
10/100
LAN 4
LAN 2
LAN 3
MGMT
LAN 1
WAN
AXC
L
X2
X3
X6
X4
X23
X9
X5
Service PC FlexPendant PLC Connected Services Factory Network Axis computer
Gateway
Cameras,
sensors, I/O
Network Interface MGMT, LAN1, LAN2, LAN3 LAN4 WAN AXC
IP configuration Address: Address: Address: Address:
192.168.125.1 192.168.126.2 Specified in 192.168.127.1
Robot Studio
or on FlexPendant
xx1800003053
Privates Netzwerk
Die Ports X3 (MGMT), X6 (LAN 1), and X4 (LAN 2) and X2 (LAN 3) gehören zum
Segment Private Network.
Hinweis
Private Network Segmente mehrerer Robotersteuerungen können nicht
miteinander verbunden werden.
Der MGMT-Port sollte vom Servicepersonal in der Nähe zur Steuerung verwendet
werden, wobei ein einzelner Client mit der Steuerung verbunden ist.
Hinweis
Der Management-Port sollte niemals für mehr als einen Client gleichzeitig
verwendet werden. ABB Robotics übernimmt keine Verantwortung für
Fehler/Gefahren, die entstehen, wenn mehr als ein Client mit dem
Management-Port verbunden ist.
Fortsetzung auf nächster Seite
18 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.2 Hardwareübersicht
2.1 Netzwerkverbindungen am OmniCore
Fortsetzung
Die Ports LAN1, LAN2 und LAN3 sind für den Anschluss der internen Computer
der Robotersteuerung oder der netzwerkbasierten Prozessgeräte an die Steuerung
ausgelegt, beispielsweise Kameras und Schweißausrüstung.
Ability-Netzwerk
Port X5 (LAN 4) gehört zum Segment Ability Network. Der LAN4-Port ist zum
Anschluss an das Connected-Services-Gateway-Module ausgelegt; es handelt
sich um einen Firewall-Zugang zu einem ABB Ability™ Cloud-Server.
Die Verbindung wird durch ein eingebettetes Connected Services Gateway
hergestellt (Wired, WLAN oder 3G).
Öffentliches Netzwerk
Der X23 (WAN)-Port gehört zum Segment Public Network. Der WAN-Port ist eine
öffentliche Netzwerkschnittstelle der Steuerung, die typischerweise mit einer vom
Netzwerkadministrator bereitgestellten öffentlichen IP-Adresse mit dem
Betriebsnetzwerk verbunden ist.
Das Segment Public Network wird verwendet für:
• Verbindung zu einem PC, auf dem RobotStudio läuft
• Montage von FTP- oder NFS-Laufwerken über die Steuerung
• Betrieb eines Industrial Ethernet.
Hinweis
Das Public Network kann in RobotStudio oder auf dem FlexPendant konfiguriert
werden.
Antriebsnetzwerk
Der X9 (AXC)-Port ist für den Anschluss an das Roboter-Antriebssystem ausgelegt.
Der AXC-Port wird immer mit dem Achscomputer verbunden. Wenn MultiMove
verwendet wird, wird AXC mit einem Schalter verbunden, der eine Verbindung zu
allen Achscomputern herstellt.
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 19
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.2 Hardwareübersicht
2.1 Netzwerkverbindungen am OmniCore
Fortsetzung
Ein EtherNet/IP-Netzwerk an die Robotersteuerung angeschlossen
Ein EtherNet/IP-Adapter ist im öffentlichen Netzwerk über WAN verfügbar. Ein
Ethernet/IP-Scanner kann gleichzeitig auf dem privaten und öffentlichen Netzwerk
verwendet werden.
Die folgende Abbildung zeigt das Netzwerk, wenn ein Scanner und ein Adapter an
den WAN-Port des Hauptcomputers angeschlossen werden:
Cell I/O
PLC
I/O I/O
Factory Network & Industrial Network
EtherNet/IP
Robot Controller 1 Robot Controller 2
Private Public Private Public
MGMT LAN1 LAN2 LAN3 WAN MGMT LAN1 LAN2 LAN3 WAN
Private I/O
xx1800003192
Hinweis
Die Firewall Manager-Einstellungen müssen auf „YES“ (JA) gesetzt sein, wenn
die EtherNet/IP im öffentlichen Netz verwendet werden soll. Die Konfiguration
erfolgt in RobotStudio unter Konfiguration -> Kommunikation -> Firewall
Manager. Weitere Informationen finden Sie unter
Bedienungsanleitung - Integrator-Leitfaden OmniCore.
Fortsetzung auf nächster Seite
20 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.2 Hardwareübersicht
2.1 Netzwerkverbindungen am OmniCore
Fortsetzung
Definieren von Netzwerkeinstellungen
Netzwerkeinstellungen können entweder in RobotStudio oder aus dem FlexPendant
für die Steuerung definiert werden:
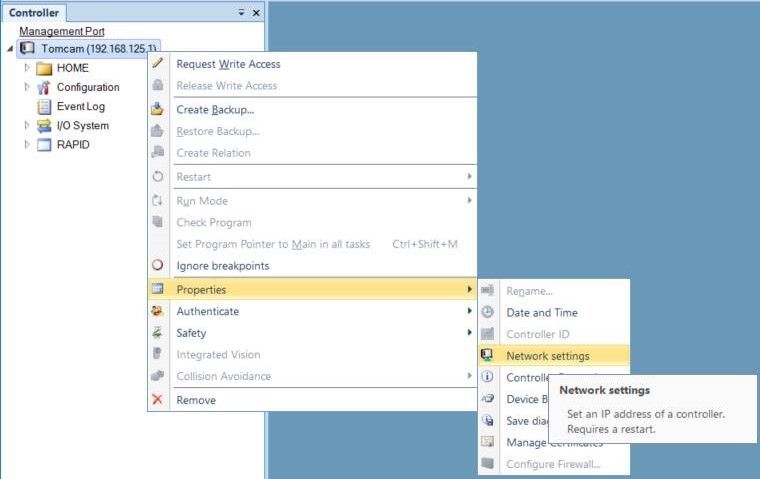
• Definieren von Netzwerkeinstellungen in RobotStudio:
1 Im Konfigurationsbrowser, klicken Sie mit der rechten Maustaste auf
die Steuerung, wählen Sie Eigenschaften und dann
Netzwerkeinstellungen.
xx2000000488
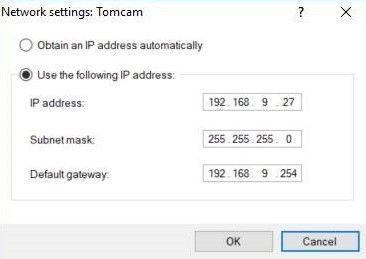
2 Im Fenster Netzwerkeinstellungen legen Sie die Werte fest für:
- IP-Adresse:Die IP-Adresse der OmniCore-Steuerung im
EtherNet-Netzwerk.
- Subnetzmaske: Die Subnetzmaske.
- Default Gateway: Das Standard-Gateway.
xx2000000489
• Definieren von Netzwerkeinstellungen am FlexPendant:
1 Am Start-Bildschirm tippen Sie auf Einstellungen und dann wählen
Sie aus dem Menü Netzwerk aus.
2 Definieren Sie die IP-Adresse für die Steuerung und tippen Sie auf
OK.
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 21
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.2 Hardwareübersicht
2.2 Ethernet-Switch
2.2 Ethernet-Switch
Voraussetzungen
Es wird empfohlen, dass Switches, die im E/A-Netzwerk verwendet werden, Quality
of Service (QoS) unterstützen.
Die E/A-Geräte markieren die eigenen Pakete mit einem Prioritätswert. Der
Prioritätswert wird verwendet, um einen besseren E/A-Datendurchsatz und kürzere
Verzögerungen im Netzwerk zu erzielen.
Switches und Router können so den kritischen Datenverkehr des E/A-Geräts vom
nicht kritischen Datenverkehr unterscheiden. Um dazu in der Lage zu sein, müssen
die Switches und Router Quality of Service unterstützen.
22 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.2 Hardwareübersicht
2.3 E/A-Geräte
2.3 E/A-Geräte
Einschränkungen
Jeder für EtherNet/IP kompatible E/A-Gerätetyp kann an das EtherNet/IP-Netzwerk
angeschlossen werden. Alle E/A-Geräte müssen der Norm EtherNet/IP entsprechen
und durch ODVA auf Konformität getestet sein. E/A-Geräte können in der
OmniCore-Steuerung montiert werden.
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 23
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Diese Seite wurde absichtlich leer gelassen
3 Software-Übersicht
3.1 Informationen über das Adapter-Gerät
3 Software-Übersicht
3.1 Informationen über das Adapter-Gerät
Allgemeines
Um das interne EtherNet/IP-Adapter-Gerät zu verwenden, muss die
OmniCore-Steuerung mit der Option 3024-2 EtherNet/IP Adapter installiert sein.
Das EtherNet/IP-Adapter-Gerät kann verwendet werden für:
• Anschluss einer SPS an die OmniCore-Steuerung.
• verbinden der OmniCore-Steuerung mit einer weiteren OmniCore-Steuerung,
die als Scanner fungiert.
Industrielles Netzwerk
Wenn das Robotersystem mit der 3024-2 EtherNet/IP Adapter-Option installiert ist,
wird beim Systemstart ein vordefiniertes industrielles Netzwerk mit dem Namen
EtherNetIP erstellt.
Vordefiniertes internes Adapter-Gerät
Wenn ein Robotersystem mit der Option 3024-2 EtherNet/IP Adapter installiert ist,
wird ein vordefiniertes internes Adapter-Gerät mit dem Namen EN_Internal_Device
beim Systemstart erstellt. Dieses interne Gerät wird verwendet, um das interne
Adapter-Gerät in der OmniCore-Steuerung festzulegen, wodurch eine SPS mit der
OmniCore-Steuerung verbunden werden kann. Es kann jeweils nur ein internes
Adapter-Gerät in der OmniCore-Steuerung festgelegt werden.
E/A-Gerät
Die Zuordnung für die Ein- und Ausgänge startet bei Bit 0.
EDS-Datei
Es ist eine elektronische Datenblatt-Datei, EDS-Datei, für das interne Adapter-Gerät
verfügbar, die über die gleiche Konfiguration wie der vordefinierte EtherNet/IP
Internal Adapter Device EN_Internal_Device verfügt.
Die EDS-Datei, Omnicore.eds, für das Adapter-Gerät kann über RobotStudio oder
die OmniCore-Steuerung erhalten werden.
• Im RobotWare-Installationsordner in RobotStudio:
...\DistributionPackages\ABB.RobotWare-x.x.x-xxx\RobotPackages
\RobotControl_x.x.xxx\utility\service\EDS\
• An der OmniCore-Steuerung:
...\RobotWare\RobotControl_x.x.x-xxx\utility\service\EDS\
Hinweis
Navigieren Sie zum RobotWare-Installationsordner in der Registerkarte Add-Ins
in RobotStudio, indem Sie im Add-In-Browser auf die installierte
RobotWare-Version rechtsklicken und Paketordner öffnen auswählen.
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 25
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.3 Software-Übersicht
3.1 Informationen über das Adapter-Gerät
Fortsetzung
Vorlage für E/A-Konfigurationsdatei
Für das interne Adapter-Gerät ist eine E/A-Konfigurationsdateivorlage verfügbar.
Die Datei beinhaltet vorkonfigurierte Namen für alle verfügbaren Eingänge und
Ausgänge. Die Datei kann mit RobotStudio oder FlexPendant auf die Steuerung
geladen werden, um die Konfiguration zu vereinfachen und zu beschleunigen.
Die E/A-Konfigurationsdateivorlage EN_Internal_Device.cfg kann über RobotStudio
oder die OmniCore-Steuerung erhalten werden.
• Im RobotWare-Installationsordner in RobotStudio: ...\RobotPackages\
RobotWare_RPK_\utility\service\ioconfig\EtherNetIP\
• An der OmniCore-Steuerung: \PRODUCTS\
\utility\service\ioconfig\EtherNetIP\
Hinweis
Navigieren Sie zum RobotWare-Installationsordner in der Registerkarte Add-Ins
in RobotStudio, indem Sie im Add-In-Browser auf die installierte
RobotWare-Version rechtsklicken und Paketordner öffnen auswählen.
Assembly
Das interne Adapter-Gerät hat die folgenden Assembly-Werte.
Assembly Wert
Ausgang 112
Eingang 100
Konfiguration 0
Verhalten
Es wird ein zyklischer E/A-Anschluss unterstützt, und die Größe des
E/A-Anschlusses wird durch das vordefinierte interne EtherNet/IP-Adapter-Gerät
EN_Internal_Device festgelegt.
Hinweis
Wenn das Adapter-Gerät EtherNet/IP die Verbindung zum Scanner verliert,
werden die konfigurierten Eingangssignale gelöscht (auf null zurückgesetzt). Die
Ausgangssignale werden beibehalten und können geändert werden.
Beim Wiederherstellen der Verbindung aktualisiert das EtherNet/IP-Adapter-Gerät
die Eingangs- und Ausgangssignale.
26 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.3 Software-Übersicht
3.2 Informationen über den internen Scanner
3.2 Informationen über den internen Scanner
Allgemeines
Um den internen EtherNet/IP-Scanner zu verwenden, muss die OmniCore-Steuerung
mit der Option 3024-1 EtherNet/IP Scanner installiert sein.
Der interne EtherNet/IP-Scanner kann für Folgendes verwendet werden:
• anschließen von EtherNet/IP E/A-Geräten an die OmniCore-Steuerung.
• verbinden der OmniCore-Steuerung mit einer weiteren OmniCore-Steuerung,
die als Adapter fungiert.
Industrielles Netzwerk
Wenn das Robotersystem mit der Option EtherNet/IP Scanner/Adapter installiert
ist, wird beim Systemstart ein vordefiniertes industrielles Netzwerk EtherNetIP
erstellt.
Gerätevorlage
Es sind vordefinierte Gerätevorlagen für den internen Scanner verfügbar. Diese
Gerätevorlagen können beim Festlegen eines neuen E/A-Geräts mit dem
Konfigurations-Editor in RobotStudio oder FlexPendant verwendet werden, siehe
Erstellen und Konfigurieren des internen Scanners auf Seite 34. Beispiele für
vorhandene Gerätevorlagen:
• ABB EtherNet/IP Adapter Device wird auf der Scanner-Seite beim Anschluss
an einen anderen OmniCore EtherNet/IP-Adapter verwendet
• Skalierbar E/A-Gerät von ABB: 16DO/16DI (Basisversion)
• Skalierbar E/A-Gerät + Digital von ABB: 16DO/16DI + 16DO/16DI
• Skalierbar E/A-Gerät + Analog von ABB: 16DO/16DI + 4DO/4DI
• Skalierbar E/A-Gerät + Relais von ABB: 16DO/16DI + 8DO/8DI
Abgesehen von den oben aufgeführten vorhandenen Gerätevorlagen können Sie
Gerätevorlagen erstellen, um ein neues E/A-Gerät zu definieren. Weitere
Informationen erhalten Sie unter Verwendung von EDS-Dateien zur Erstellung von
Gerätevorlagen auf Seite 37.
Anzahl der zulässigen E/A-Geräte
Eine Höchstmenge von 20 + 20 benutzerdefinierten E/A-Geräten kann im
OmniCOre-System definiert werden, weitere Informationen dazu siehe Gerätetyp
im Abschnitt I/O System zu Technisches Referenzhandbuch - Systemparameter.
Folgende Angaben werden als benutzerdefinierte E/A-Geräte gezählt:
• Alle EtherNet/IP-Adapter-Geräte, die an den OmniCore-EtherNet/IP-Scanner
angeschlossen sind.
• Simulierte EtherNet/IP-E/A-Geräte.
Hinweis
Das interne Adapter-Gerät wird nicht als benutzerdefiniertes E/A-Gerät gezählt.
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 27
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.3 Software-Übersicht
3.2 Informationen über den internen Scanner
Fortsetzung
Es können ABB E/A-Geräte oder E/A-Geräte von anderen Herstellern verwendet
werden. Es ist nur die EtherNet/IP-Scanner/Adapter-Option für den Betrieb von
E/A-Geräten anderer Hersteller erforderlich.
Die Werte von Eingang und Ausgang Assembly werden vom EtherNet/IP-Scanner
zur Lokalisierung der Eingangs- und Ausgangsdaten im E/A-Gerät verwendet. Die
Werte der Assembly für verschiedene E/A-Geräte sind in der EDS-Datei und im
Benutzerhandbuch verfügbar. Wir empfehlen, für die Werte der Assembly des
E/A-Geräts das Benutzerhandbuch zu konsultieren.
Verbinden zweier OmniCore-Systeme
Beim Zusammenschließen von zwei OmniCore-Systemen muss der interne Adapter
wie jedes andere Gerät des anderen OmniCore-Systems angezeigt und konfiguriert
werden, das als Scanner fungiert. Siehe Kommunikation zwischen zwei
OmniCore-Steuerungen auf Seite 48.
Die folgende Abbildung zeigt, wie das vordefinierte interne Gerät
(EN_Internal_Device) und die Gerätevorlage ABB EtherNet/IP Adapter Device
(EN_Device) verwendet werden.
EN_Internal_Device EN_Device
OmniCore OmniCore
EtherNet/IP Adapter EtherNet/IP Adapter
xx1900000772
28 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.4 Installieren und Konfigurieren des internen Adapter-Geräts
4.1 Empfohlene Vorgehensweise:
4 Installieren und Konfigurieren des internen
Adapter-Geräts
4.1 Empfohlene Vorgehensweise:
Allgemeines
In diesem Abschnitt wird die empfohlene Vorgehensweise für die Installation und
Konfiguration des EtherNet/IP-Adapter-Geräts beschrieben. Die Vorgehensweise
hilft dabei, die Beziehung zwischen den unterschiedlichen Schritten zu verstehen.
Wenn die OmniCore-Steuerung an einen externen Scanner angeschlossen ist,
fungiert die OmniCore-Steuerung im EtherNet/IP-Netzwerk wie ein gewöhnliches
Adapter-Gerät.
Grundlegende Schritte
Gehen Sie wie folgt vor, um ein EtherNet/IP-Adapter-Gerät zu installieren und zu
konfigurieren.
Aktion Siehe
1 Konfigurieren Sie die Parametergruppe Technisches Referenzhandbuch - Systempa-
Communication über RobotStudio. rameter
2 Konfigurieren Sie die EtherNet/IP Konfigurieren der EtherNet/IP-Netzwerkeinstel-
Netzwerkeinstellungen mit RobotStu- lungen auf Seite 30
dio.
3 Konfigurieren Sie das Adapter-Gerät in Konfigurieren des internen Adapter-Geräts auf
der OmniCore-Steuerung und verwen- Seite 31
den Sie dabei RobotStudio oder Flex-
Pendant.
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 29
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.4 Installieren und Konfigurieren des internen Adapter-Geräts
4.2 Konfigurieren der EtherNet/IP-Netzwerkeinstellungen
4.2 Konfigurieren der EtherNet/IP-Netzwerkeinstellungen
Allgemeines
Nachfolgend wird beschrieben, wie die EtherNet/IP-Netzwerkeinstellungen unter
Verwendung von RobotStudio zu ändern sind.
Konfiguration des industriellen Netzwerks
Gehen Sie wie folgt vor, um die EtherNet/IP-Netzwerkeinstellungen in der
OmniCore-Steuerung unter Verwendung von RobotStudio zu konfigurieren.
1 Starten Sie RobotStudio und stellen Sie eine Verbindung zur
OmniCore-Steuerung her. Beantragen Sie Schreibzugriff.
2 Öffnen Sie den Konfigurationseditor und wählen Sie E/A-System.
Für weitere Informationen über die Parameter siehe Systemparameter auf
Seite 51.
3 Klicken Sie in der Liste Typ auf EtherNet/IP Network und bearbeiten Sie den
Parameter EtherNetIP.
xx1900001110
Geben Sie die folgenden Parameterwerte ein:
• Identifcation Label, benutzerdefiniert.
Klicken Sie auf OK.
4 Starten Sie die Steuerung neu oder fahren Sie mit dem nächsten
Konfigurationsschritt fort.
Konfigurieren des internen Adapter-Geräts auf Seite 31
30 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.4 Installieren und Konfigurieren des internen Adapter-Geräts
4.3 Konfigurieren des internen Adapter-Geräts
4.3 Konfigurieren des internen Adapter-Geräts
Konfiguration des internen Adapter-Geräts
Gehen Sie wie folgt vor, um das interne Adapter-Gerät in der OmniCore-Steuerung
mithilfe von RobotStudio zu konfigurieren.
1 Starten Sie RobotStudio und stellen Sie eine Verbindung zur
OmniCore-Steuerung her. Beantragen Sie Schreibzugriff.
2 Öffnen Sie den Konfigurationseditor und wählen Sie E/A-System.
Für weitere Informationen über die Parameter siehe Systemparameter auf
Seite 51.
3 Klicken Sie in der Liste Typ auf internes EtherNet/IP-Gerät, klicken Sie mit
der rechten Maustaste im Arbeitsbereich auf das Element EN_Internal_Device
und wählen Sie Internes EtherNet/IP-Gerät bearbeiten.
xx1900001111
Bearbeiten Sie die folgenden Parameterwerte, sofern anwendbar.
• Connected to Industrial Network (Verbunden mit industriellem
Netzwerk), sollte EtherNetIP sein.
• Identifcation Label, benutzerdefiniert.
• Wenn die Größe geändert werden muss, ändern Sie die Standardwerte
für Connection Input Size (Anschlusseingangsgröße) und Connection
Output Size (Anschlussausgangsgröße) auf die gewünschte Größe.
Hinweis
Dieser Schritt ist optional.
Klicken Sie auf OK.
4 Klicken Sie in der Liste Type („Typ“) auf Signal.
Fügen Sie E/A-Signale für das interne Adapter-Gerät hinzu.
5 Starten Sie die Steuerung neu.
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 31
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Diese Seite wurde absichtlich leer gelassen
5 Installieren und Konfigurieren des internen Scanners
5.1 Empfohlene Vorgehensweise:
5 Installieren und Konfigurieren des internen Scanners
5.1 Empfohlene Vorgehensweise:
Allgemeines
In diesem Abschnitt wird die empfohlene Vorgehensweise für die Installation und
Konfiguration des internen EtherNet/IP-Scanners beschrieben.
Grundlegende Schritte
Gehen Sie wie folgt vor, um einen EtherNet/IP-Scanner zu installieren und zu
konfigurieren.
Aktion Siehe
1 Konfigurieren Sie die Parametergruppe Technisches Referenzhandbuch - Systempa-
Communication über RobotStudio. rameter
2 Konfigurieren Sie die EtherNet/IP Konfigurieren der EtherNet/IP-Netzwerkeinstel-
Netzwerkeinstellungen mit RobotStu- lungen auf Seite 30
dio.
3 Stellen Sie die IP-Adresse am externen Benutzerhandbuch des Herstellers des exter-
Gerät ein. nen Gerätes.
4 Konfigurieren Sie die E/A-Geräte, die Erstellen und Konfigurieren des internen
mit dem industriellen Netzwerk Ether- Scanners auf Seite 34
Net/IP verbunden sind, und verwenden
Sie dafür RobotStudio oder FlexPen-
dant.
Zusätzliche Konfiguration
Aktion Siehe
Erstellen von Gerätevorlagen mit EDS-Datei- Verwendung von EDS-Dateien zur Erstellung
en von Gerätevorlagen auf Seite 37.
Konfigurieren der QuickConnect-Funktionali- QuickConnect auf Seite 70.
tät
Aufbauen von Kommunikation zwischen zwei Kommunikation zwischen zwei OmniCore-
OmniCore-Steuerungen. Steuerungen auf Seite 48.
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 33
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.5 Installieren und Konfigurieren des internen Scanners
5.2 Erstellen und Konfigurieren des internen Scanners
5.2 Erstellen und Konfigurieren des internen Scanners
Interne Scanner-Konfiguration
Gehen Sie wie folgt vor, um den EtherNet/IP-Scanner in der OmniCore-Steuerung
mit dem Konfigurationseditor in RobotStudio zu konfigurieren.
1 Starten Sie RobotStudio und stellen Sie eine Verbindung zur
OmniCore-Steuerung her. Beantragen Sie Schreibzugriff.
2 Klicken Sie auf Konfigurationseditor und wählen Sie E/A-System.
3 Klicken Sie in der Liste Typ auf EtherNet/IP Network, klicken Sie dann mit
der rechten Maustaste im Arbeitsbereich auf das Element EtherNetIP und
wählen Sie Edit EtherNet/IP Network.
Für weitere Informationen über die Parameter siehe Systemparameter auf
Seite 51.
4 Geben Sie die Parameterwerte für das EtherNet/IP-Netzwerk ein.
xx1900001112
Klicken Sie auf OK.
5 Klicken Sie in der Liste Typ auf EtherNet/IP Device (EtherNet/IP-Gerät), und
klicken Sie dann mit der rechten Maustaste in den Arbeitsbereich, und wählen
Sie New EtherNet/IP Device (neues EtherNet/IP-Gerät) aus.
Fortsetzung auf nächster Seite
34 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.5 Installieren und Konfigurieren des internen Scanners
5.2 Erstellen und Konfigurieren des internen Scanners
Fortsetzung
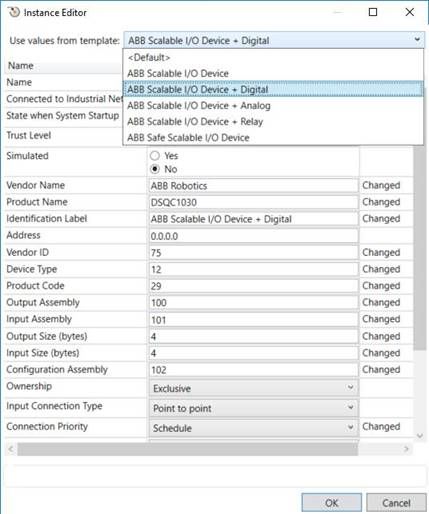
6 Der Dialog für das Erstellen von neuen E/A-Geräten wird angezeigt:
xx1900001113
Vervollständigen Sie die folgenden obligatorischen Felder für das neue
E/A-Gerät.
• Werte aus der Vorlage verwenden, wählen Sie die Option ABB
Scalable I/O Device.
Hinweis
Dropdown-Liste Use values from template (Werte aus der Vorlage
verwenden) zeigt die vorhandenen Vorlagen und Vorlagen, die mit
EDS-Datei erstellt wurden (Siehe Verwendung von EDS-Dateien zur
Erstellung von Gerätevorlagen auf Seite 37).
• Connected to Industrial Network (Verbunden mit industriellem
Netzwerk), sollte EtherNetIP sein.
• Identifcation Label, benutzerdefiniert.
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 35
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.5 Installieren und Konfigurieren des internen Scanners
5.2 Erstellen und Konfigurieren des internen Scanners
Fortsetzung
• Adresse, geben Sie die IP-Adresse ein, die für das Gerät definiert
wurde.
Hinweis
Es wird nicht empfohlen, führende Nullen in der
Dezimalpunktschreibweise von IP-Adressen zu verwenden. Die Ziffern
könnten fälschlich als Oktalzahlen interpretiert werden. Sonst treten
unterschiedliche Verhalten zwischen virtuellen und realen Controllern
auf.
Bearbeiten Sie die optionalen Felder ggf. weiter:
• Ändern Sie bei Bedarf die Größe in Eingangsgröße und
Ausgangsgröße.
Klicken Sie auf OK.
7 In der Liste Typ klicken Sie mit der rechten Maustaste auf Signal und wählen
Sie Neues Signal oder rechtsklicken Sie und wählen Sie Signal bearbeiten.
8 Fügen Sie E/A-Signale für das neue E/A-Gerät durch Eingabe des
Gerätenamens in das Feld Zugewiesen zu Gerät) hinzu.
xx1900001115
Klicken Sie auf OK.
9 Starten Sie die OmniCore-Steuerung neu, um die Verbindung zum
konfigurierten Gerät herzustellen.
Fortsetzung auf nächster Seite
36 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.5 Installieren und Konfigurieren des internen Scanners
5.2.1 Verwendung von EDS-Dateien zur Erstellung von Gerätevorlagen
5.2.1 Verwendung von EDS-Dateien zur Erstellung von Gerätevorlagen
Verfahren
Aus EDS-Dateien können Gerätevorlagen erstellt werden. Eine Gerätevorlage wird
für jede gültige Verbindung erstellt, die im Abschnitt „Connection Manager“
(Verbindungs-Manager) in der EDS-Datei gefunden wird.
Gehen Sie wie folgt vor, um Gerätevorlagen mit EDS-Dateien zu erstellen.
Aktion Hinweis
1 Das System muss sich im Einricht-
betrieb befinden, damit die Schritte
weiter ausgeführt werden können.
2 Starten Sie RobotStudio und stellen
Sie eine Verbindung zur OmniCore-
Steuerung her. Beantragen Sie
Schreibzugriff.
Das System muss sich im Einricht-
betrieb befinden, damit die Schritte
weiter ausgeführt werden können.
3 Klicken Sie auf Dateiübertragung,
und suchen Sie den Ordner EDS im
Verzeichnis HOME.
Wählen Sie die erforderliche
EDS-Datei aus, und klicken Sie auf
den Rechtspfeil, um die Dateien zu
übertragen. xx1400002221
Hinweis
Übertragen Sie die EDS-Dateien für
die beteiligten Geräte in das Ether-
Net/IP-Netzwerk.
4 Klicken Sie auf E/A-System, um den
Ordner zu erweitern. Wählen Sie
EtherNetIP, und klicken Sie mit der
rechten Maustaste in den Arbeitsbe-
reich, und wählen Sie Scan EDS fi-
le(s) (EDS-Datei bzw. -Dateien
xx1400002222
scannen).
• Die Dateien werden analy-
siert.
• Klicken Sie auf Yes, um das
Erstellen der Gerätevorlagen
fortzusetzen.
• Klicken Sie auf Ok, um die
Berichterstellung im Ereig-
nisprotokoll fortzusetzen.
Hinweis
Der EDS-Leser prüft nicht, ob die
Datei syntaktisch korrekt ist. Es ist
wichtig, dass das aus der Gerätevor-
lage erstellte Gerät manuell geprüft
wird.
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 37
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.5 Installieren und Konfigurieren des internen Scanners
5.2.1 Verwendung von EDS-Dateien zur Erstellung von Gerätevorlagen
Fortsetzung
Aktion Hinweis
5 Die Gerätevorlagen werden erstellt
und sind als Optionen in Use values
from template (Werte aus der Vorla-
ge verwenden), wenn eine neues
E/A-Gerät erstellt wird.
38 Anwendungshandbuch - EtherNet/IP Scanner/Adapter
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.5 Installieren und Konfigurieren des internen Scanners
5.3.1 Information
5.3 Explicit Messaging-Dienste
5.3.1 Information
Allgemeines
Sie können E/A-Geräte durch Explicit Messaging-Dienste konfigurieren. Dies kann
entweder beim Starten durch Definition des EtherNet/IP-Befehls an das konfigurierte
Gerät geschehen, oder während der Laufzeit von RAPID durch Fieldbus Command
Interface (FCI).
Hinweis
Informationen dazu, welche Explicit Messaging-Dienste für ein bestimmtes
E/A-Gerät verfügbar sind und wie die Parameter eingestellt werden, finden Sie
in der Zuliefererdokumentation des E/A-Geräts und von Common Industrial
Protocol (CIP) Specification, siehe Referenzen auf Seite 7.
EtherNet/IP-Befehl-Systemparameter
Die EtherNet/IP spezifischen Systemparameter im EtherNet/IP Command-Typ sind:
• Path (Path), siehe Path auf Seite 87.
• Service (Service), siehe Service auf Seite 88.
• Download Order (-OrderNr), siehe Technisches
Referenzhandbuch - Systemparameter.
Hinweis
Weitere Informationen finden Sie unter Technisches
Referenzhandbuch - Systemparameter.
Der Parameter Path
Hier erhalten Sie eine kurze Beschreibung der Syntax, die im Parameter Path
verwendet wird.
"Path length, 20 Class 24 Instance 30 Attribute, Data type, Data
type length"
Die folgende Tabelle bietet eine Beschreibung der Parameter, die in der Syntax
verwendet werden.
Parameter Beschreibung
Path length Die Byte-Anzahl für die Zeichenfolge "20 64 24 01 30 05".
Dies ist ein optionaler Parameter.
Class Die EtherNet/IP-Klassennummer.
Instance Die Instanznummer der Klasse.
Attribute Das Attribut der angegebenen Instanz.
Data type Das Datenformat des Attributs.
Dies ist ein optionaler Parameter.
Fortsetzung auf nächster Seite
Anwendungshandbuch - EtherNet/IP Scanner/Adapter 39
3HAC066565-003 Revision: D
© Copyright 2019-2021 ABB. Alle Rechte vorbehalten.Sie können auch lesen

















































