BETRIEBSANLEITUNG DE - MIT MIR ROBOT INTERFACE 2.0 - MOBILE INDUSTRIAL ROBOTS
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Oktober 2017 v.1.02017 v.1.2
mit MiR Robot Interface 2.0
Betriebsanleitung
de
01/2019 v1.2
Copyright und Haftungsausschluss
Alle Rechte vorbehalten. Diese Anleitung darf weder im Ganzen noch in Teilen ohne die ausdrückliche
schriftliche Zustimmung von Mobile Industrial Robots ApS (MiR) auf irgendeine Weise vervielfältigt
werden. MiR übernimmt keinerlei ausdrücklichen oder stillschweigenden Garantien in Bezug auf dieses
Dokument oder seine Inhalte. Der Inhalt dieses Dokuments unterliegt zudem unangekündigten
Veränderungen. Obwohl diese Anleitung unter Beachtung größter Sorgfalt erstellt wurde, können Fehler
und Auslassungen nicht ausgeschlossen werden. Aus diesem Grund übernimmt MiR keinerlei Haftung für
Schäden, die sich aus der Verwendung der hier enthaltenen Informationen ergeben.
Copyright © 2017-2019 Mobile Industrial Robots
Kontaktdaten des Herstellers:
Mobile Industrial Robots
Emil Neckelmanns Vej 15F
DK-5220 Odense SØ
www.mir-robots.com
Telefon: +45 20 377 577
E-Mail: support@mir-robots.com
CVR: 35251235
Weitere
Informationen auf
unserer Website
Inhaltsverzeichnis
A Nutzlastspezifikationen.....................................................................................................34
2 Über diese Anleitung .........................................................................................................3
2.1 Übersicht .....................................................................................................................3
2.2 Änderungsverlauf ........................................................................................................3
2.3 Weitere Informationen................................................................................................3
3 Sicherheit...........................................................................................................................4
3.1 Übersicht .....................................................................................................................4
3.2 Sicherheitskonzept ......................................................................................................4
3.3 Allgemeine Sicherheitshinweise ..................................................................................5
3.3 1 Warnhinweise...................................................................................................5
3.3 2 Sicherheitshinweise ..........................................................................................6
3.3 3 Hinweise ...........................................................................................................7
3.4 Lithium-Batterie...........................................................................................................8
3.5 Sicherheitskreis............................................................................................................8
4 Zertifizierungen .................................................................................................................9
4.1 Übersicht .....................................................................................................................9
4.2 Zertifikate ....................................................................................................................9
4.3 Angewandte Normen ..................................................................................................9
5 Erste Schritte ...................................................................................................................11
5.1 Lieferumfang..............................................................................................................11
5.2 Auspacken des MiR100™...........................................................................................12
5.2 1 Herausnehmen aus der Kiste..........................................................................12
5.2 2 Einschalten......................................................................................................13
5.3 Verbinden ..................................................................................................................16
5.4 Aufladen des Roboters ..............................................................................................17
5.5 Testen des Roboters ..................................................................................................18
5.6 Ausschalten des Roboters .........................................................................................19
6 Produktvorstellung ..........................................................................................................20
6.1 Über den MiR100™....................................................................................................20
6.2 Typenschild................................................................................................................20
6.3 Äußere Komponenten des MiR100™.........................................................................21
6.4 Innere Komponenten des MiR100™..........................................................................22
6.5 Sensorsysteme...........................................................................................................23
6.6 Leuchtanzeigen..........................................................................................................25
6.7 Wichtigste Features des MiR100™ ............................................................................26
7 An- und Aufbauten ..........................................................................................................27
7.1 Übersicht ...................................................................................................................27
7.2 Anbringen des Aufsatzmoduls ...................................................................................27
8 Wartung...........................................................................................................................28
8.1 Übersicht ...................................................................................................................28
8.1 1 Regelmäßige Prüfungen und Wartungsmaßnahmen .....................................28
8.1 2 Regelmäßige Prüfungen und Austauschmaßnahmen ....................................29
9 Einpacken vor dem Transport..........................................................................................30
9.1 Vorbereitungen..........................................................................................................30
9.2 Einpacken des Roboters ............................................................................................31
J Anschlüsse – Pinbelegung ..................................................................................................36
K Zertifikate ..........................................................................................................................38
L Konformitätserklärung.......................................................................................................40
1 Über diese Anleitung
••••••
1.1 Übersicht
Diese Betriebsanleitung enthält alle wichtigen Informationen zur Einrichtung und Inbetriebnahme
eines MiR100™ Roboters. Sie enthält zudem die für die sichere Verwendung des Roboters nötigen
Informationen, technische Daten, Hinweise zur Fehlerbehebung sowie Anweisungen für seine
ordnungsgemäße Wartung. Die Betriebsanleitung ist für Händler von Mobile Industrial Robots
sowie Endnutzer bestimmt, die für den täglichen Betrieb des MiR100™ Roboters verantwortlich
sind.
1.2 Änderungsverlauf
Die Tabelle zeigt die aktuelle sowie vorherige Versionen dieses Dokuments und die dazugehörigen
Versionen der Produktsoftware an.
Dok.-Nr. Veröffentlicht Beschreibung SW-Vers. HW-Vers.
am
1,0 27.11.2017 Erstausgabe 2.0.2 1,0
1,1 17.08.2018 • Aktualisiert für Hardwareversion 2.1 2.2.0 und 2,1
höher
• Aktualisierungen und Verbesserungen in der
gesamten Anleitung
1,2 04.01.2019 • Aktualisiert für Hardwareversion 3.0 2.3.0 und 3,0
höher
• Aktualisierungen und Verbesserungen in der
gesamten Anleitung
1.3 Weitere Informationen
Anleitungen können von den Produktseiten der MiR-Website heruntergeladen werden. Dort finden
Sie auch Video-Tutorials, Produktabbildungen und technische Daten.
Beispiel:
• Kurzanleitungen – eine Anleitung, um das Produkt schnell in Betrieb nehmen zu können (wird
zusammen mit dem Roboter auch in gedruckter Form ausgeliefert)
• MiR Robot Interface Referenzanleitung – beschreibt alle Funktionen der Roboterschnittstelle
MiR Robot Interface
Verfügbar in verschiedenen Sprachen
Produktseiten: www.mobile-industrial-robots.com/de/products
Die Händlerseite, die allen MiR-Händlern zur Verfügung steht, enthält zusätzliche Informationen,
wie etwa „How to“-Anweisungen, Stromlaufpläne, CAD-Zeichnungen und Zertifikate:
• Händlerseite: www.mobile-industrial-robots.com/de/account
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 3
•
•
•
2 Sicherheit
••••••
2.1 Übersicht
Diese Anleitung enthält Hinweise, die Sie für Ihre persönliche Sicherheit und zur Vermeidung von
Sachschäden beachten müssen. Die Hinweise, die sich auf Ihre persönliche Sicherheit beziehen, sind
in der Anleitung mit einem Warnsymbol gekennzeichnet. Das Ausmaß des Risikos wird über die
unten aufgeführten Signalwörter angezeigt.
2.2 Sicherheitskonzept
Weist auf eine unmittelbare Gefahr hin, die, wenn sie nicht vermieden wird, zum Tod oder schweren
Verletzungen führt.
Weist auf eine mögliche Gefahr hin, die, wenn sie nicht vermieden wird, zum Tod oder schweren Verletzungen
führen kann.
Weist auf eine Situation hin, die, wenn sie nicht vermieden wird, zu leichten Verletzungen oder Schäden am
Gerät führen kann.
Weist auf eine Situation hin, die, wenn sie nicht vermieden wird, zu Sachschäden führen kann.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 4
•
•
•
Sicherheit
2.3 Allgemeine Sicherheitshinweise
Dieses Kapitel gibt allgemeine Sicherheitshinweise. In anderen Kapiteln der Anleitung werden einige
dieser Sicherheitshinweise wiederholt, weiter ausgeführt und durch weitere Sicherheitshinweise
ergänzt.
2.3.1 Warnhinweise
• Ordnungsgemäße Befestigung der Lasten während des Transports sicherstellen
Verletzungsgefahr durch kippenden Roboter oder umstürzende Lasten.
Alle Zubehörteile und Lasten auf dem Fahrzeug müssen ordnungsgemäß befestigt sein und den
Spezifikationen entsprechen. Siehe Nutzlastspezifikationen auf Seite 32.
• Flüssigkeitsverluste während des Transports vermeiden
Verletzungsgefahr durch ausgelaufene Flüssigkeiten.
Stellen Sie sicher, dass Ladung, die Flüssigkeiten enthält, während des Transports nicht auslaufen kann.
• Nur Originalladegerät verwenden
Verletzungsgefahr und/oder Gefahr von Sachschäden am Roboter.
Es darf nur das vom Hersteller mitgelieferte Ladegerät verwendet werden. Das Verwenden eines anderen
Ladegeräts kann die Batterie zerstören und einen Brand auslösen.
• Karten aktualisieren, um Gefahren auf der Route zu vermeiden
Verletzungsgefahr und/oder Gefahr von Sachschäden am Roboter.
Stellen Sie sicher, dass die Karten aktuell sind, um Gefahrenbereiche, wie etwa in der Nähe von
Treppenhäusern, zu vermeiden.
• Fahrzeug verantwortungsvoll fahren
Verletzungsgefahr und/oder Gefahr von Sachschäden am Roboter.
Der Roboter darf nicht über Kanten oder auf eine andere sachwidrige Weise gefahren werden.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 5
•
•
•
Sicherheit
2.3.2 Sicherheitshinweise
• Roboter nicht zum Transport von Personen verwenden
Verletzungsrisiko und/oder Risiko von Sachschäden am Roboter.
Der Roboter darf zu keinem Zeitpunkt für den Transport von Personen verwendet werden. Andernfalls erlischt
die Konformität mit der europäischen Norm EN 1525 ‚Sicherheit von Flurförderzeugen – Fahrerlose
Flurförderzeuge und ihre Systeme‘.
• Neigungen von über 5 % auf der Route vermeiden
Verletzungsrisiko und/oder Risiko von Sachschäden am Roboter.
Die Oberflächenneigung (Rampen usw.) darf 5 % nicht übersteigen, da der Roboter ansonsten ins Rutschen
geraten kann.
• Nur auf ebenen und trockenen Untergründen fahren
Verletzungsrisiko und/oder Risiko von Sachschäden am Roboter.
Auf nassen und unebenen Untergründen kann der Roboter ins Rutschen geraten.
• Den Roboter nicht überladen
Verletzungsrisiko und/oder Risiko von Sachschäden am Roboter.
Die maximale Nutzlast beträgt 100 kg (220 lbs), wenn sich die Ladung oben auf dem Roboter befindet. Wird
dieser Wert überschritten, kann die Ladung herabfallen und der Roboter umkippen oder Schaden nehmen.
Siehe auch Nutzlastspezifikationen auf Seite 32.
• Roboter nicht an Bord von Schiffen verwenden
Verletzungsrisiko und/oder Risiko von Sachschäden am Roboter.
Schwankende Untergründe auf sich bewegenden Schiffen können zum Umkippen des Roboters führen.
• Bordnetzversorgung nach dem Entfernen der oberen Abdeckung umgehend abschalten
Verletzungsrisiko und/oder Risiko von Sachschäden am Roboter.
Schalten Sie das Bordnetzrelais ab, um Masseschlüsse zu vermeiden. Siehe Produktvorstellung auf Seite 20.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 6
•
•
•
Sicherheit
2.3.3 Hinweise
• Nur für die Verwendung in Innenräumen
Risiko von Sachschäden am Roboter.
Der Roboter ist für die Verwendung in Innenräumen bestimmt und darf nicht im Freien verwendet werden.
• Kleine Gegenstände auf dem Boden im Bereich des Roboters vermeiden
Risiko von Sachschäden und/oder kleineren Schäden am Roboter.
Der Roboter kann Hindernisse von weniger als 50 mm Höhe nicht erfassen. Kleinere Gegenstände können
überfahren werden.
• Unerwünschte Gegenstände vom Boden in der Nähe des Roboters entfernen
Risiko einer ineffizienten Ausführung von Aufträgen.
Der Roboter umfährt Gegenstände, die nicht Teil der Karte sind. Dies kann jedoch Einfluss auf die Effizienz der
geplanten Route haben.
• Überhitzung der Komponenten vermeiden
Risiko von Sachschäden am Roboter oder an Roboterkomponenten.
Die Umgebungstemperatur im Bereich des Fahrzeugs darf 50 °C (122 °F) nicht überschreiten.
• Übermäßig feuchte oder trockene Umgebungen vermeiden
Risiko von Sachschäden am Roboter oder an Roboterkomponenten.
Die Feuchtigkeit in der Umgebung des Roboters muss innerhalb der Grenzwerte liegen, siehe Technische
Daten auf unserer Website.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 7
•
•
•
Sicherheit
2.4 Lithium-Batterie
Lithium-Batterien sind primäre Energiequellen mit hohem Energiegehalt, die für ein Höchstmaß an
Sicherheit konzipiert wurden.
Mögliche Gefahr
Lithium-Akkus können bei elektrischem oder mechanischem Fehlgebrauch heiß werden, explodieren
oder sich entzünden und so schwere Verletzungen verursachen.
Beachten Sie folgende Vorsichtsmaßnahmen für den Umgang mit und die Verwendung von Lithium-
Batterien:
• Schalten sie die Batterie ab, wenn Sie sie nicht verwenden.
• Schließen Sie die Batterie nicht kurz. Achten Sie beim Einsetzen und Wiederaufladen auf die richtige Polarität.
• Setzen Sie die Batterie keinen Temperaturen außerhalb des angegebenen Temperaturbereichs aus. Zünden Sie
die Batterie nicht an.
• Die Batterie darf nicht gequetscht, durchbohrt oder zerlegt werden. Die Batterie enthält Sicherheits- und
Schutzvorrichtungen, die bei Beschädigung dazu führen können, dass die Batterie Hitze erzeugt, explodiert
oder sich entzündet.
• Lassen Sie die Batterie nicht nass werden.
• Kommt auslaufende Batterieflüssigkeit in Kontakt mit dem Auge, darf das Auge nicht gerieben werden. Spülen
Sie das Auge mit Wasser aus und suchen Sie umgehend einen Arzt auf. Bei ausbleibender Behandlung kann
die Batterieflüssigkeit das Auge schädigen.
• Verwenden Sie nur das originale Ladegerät und befolgen Sie stets die Anweisungen des Batterieherstellers.
2.5 Sicherheitskreis
Dringt eine Person oder ein anderes sich bewegendes Objekt in den Sicherheitsbereich des Roboters
ein und reagiert der interne Planer aufgrund von Reaktionszeit, Fehlern usw. nicht, führt der
Sicherheitskreis einen Not-Halt des Roboters herbei. Der Roboter hält daraufhin umgehend an.
Sobald die Person bzw. das Objekt den Sicherheitsbereich wieder verlassen hat, setzt der Roboter
den Not-Halt automatisch zurück.
Der MiR100™ ist mit einem vollständig redundanten elektrischen Sicherheitskreis inklusive Sick-
Sicherheitseinrichtungen ausgestattet. Treten im Sicherheitskreis interne Fehler auf, geht der
Roboter umgehend in den Not-Halt über, d. h. alle beweglichen Teile werden mechanisch getrennt
und so spannungsfrei geschaltet. Nur mit Redundanz kann der Not-Halt zurückgesetzt und der
Betrieb fortgesetzt werden.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 8
•
•
•3 Zertifizierungen
••••••
3.1 Übersicht
Dieses Kapitel informiert über Zertifikate und Erklärungen, die für den Roboter gelten.
Eine Kopie der CE-Konformitätserklärung in verschiedenen Sprachen sowie von Drittzertifikaten
können auf der Händlerseite eingesehen und von dort heruntergeladen werden. Diese erreichen Sie
unter: http://www.mir-robots.com/downloads/certificates.
3.2 Zertifikate
Der MiR100™ wurde von einem renommierten Prüfinstitut getestet und mit folgendem Zertifikat
ausgezeichnet:
Reinraum Der MiR100™ wurde erfolgreich auf seine Eignung für den Betrieb in Reinräumen getestet und
erfüllt Luftreinheitsanforderungen gemäß ISO 14644-1.
Eine unterzeichnete Kopie des Zertifikats finden Sie im Anhang Konformitätserklärung auf Seite 40.
3.3 Angewandte Normen
Der MiR100™ ist zertifiziert und erfüllt alle grundlegenden Anforderungen der folgenden
EU-Richtlinien und Vorschriften.
Die europäischen Richtlinien sind auf der folgenden offiziellen Website verfügbar:
https://eur-lex.europa.eu
Ref.-Nr. Titel
2006/42/EG Richtlinie 2006/42/EG des Europäischen Parlaments und des Rates vom 17. Mai
2006 über Maschinen und zur Änderung der Richtlinie 95/16/EG (Neufassung) (1).
Verweis auf die verwendeten harmonisierten Normen gemäß Artikel 7(2):
Ref.-Nr. Titel
EN 60204-1:2006+A1:2009 Sicherheit von Maschinen – Elektrische Ausrüstung von Maschinen – Teil 1:
Allgemeine Anforderungen
EN ISO 12100:2010 Sicherheit von Maschinen – Allgemeine Gestaltungsleitsätze – Risikobeurteilung
und Risikominderung (ISO 12100:2010)
EN ISO 13849-1:2015 Sicherheit von Maschinen – Sicherheitsbezogene Teile von Steuerungen –
Teil 1: Allgemeine Gestaltungsleitsätze (ISO 13849-1:2015)
EN ISO 13849-2:2012 Sicherheit von Maschinen – Sicherheitsbezogene Teile von Steuerungen –
Teil 2: Validierung (ISO 13849-2:2012)
EN ISO 13850:2015 Sicherheit von Maschinen – Not-Halt-Funktion – Gestaltungsleitsätze
(ISO 13850:2015)
EN 1175-1:1998+A1:2010 Sicherheit von Flurförderzeugen – Elektrische Anforderungen – Teil 1: Allgemeine
Anforderungen für Flurförderzeuge mit batterieelektrischem Antrieb
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 9
•
•
•Zertifizierungen
Verweis auf andere angewandte technische Normen und Spezifikationen:
Ref.-Nr. Titel
EN 1525:1997-09 Sicherheit von Flurförderzeugen – Fahrerlose Flurförderzeuge und ihre Systeme
Siehe auch unterschriebene Kopie der Konformitätserklärung in Anhang D Konformitätserklärung
auf Seite 40.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 10
•
•
•Erste Schritte
4 Erste Schritte
••••••
4.1 Lieferumfang
Abb. 4.1. Lieferumfang
1. Roboter
2. MiR100 Set
• Not-Halt-Box, externe Antenne und 4 Schrauben M10x40
• 2 Ladekabel, eines für 110 V und eines für 220 V
• Ein externes Ladegerät, 24 V DC, 10 A
3. MiR-Ordner mit folgendem Inhalt:
• Printdokumente: MiR100 Kurzanleitung in englischer Sprache und ggf. der Landessprache,
Passwortblatt, CE-Konformitätserklärung, Montageanweisungen für Not-Halt-Box
• USB-Stick: Video zu ersten Schritten, MiR100™ Betriebsanleitung, CE-Konformitätserklärung, weitere
Anleitungen
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 11
•
•
•Erste Schritte
4.2 Auspacken des MiR100™
4.2.1 Herausnehmen aus der Kiste
Nehmen Sie den MiR100™ wie folgt aus der Kiste:
Schritt Aktion
1 Nehmen Sie den Palettendeckel ab und entnehmen Sie die Kiste mit dem MiR100 Set.
2 Entnehmen Sie die oberen und seitlichen Schaumstoffeinsätze und entfernen Sie den
Palettenrahmen.
3 Legen Sie den Palettendeckel als Rampe auf der Rückseite des Roboters an die Palette an.
Bewahren Sie die Verpackung für einen späteren Transport des Roboters auf.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 12
•
•
•Erste Schritte
4.2.2 Einschalten
Schritt Aktion
1 Fassen Sie an die beiden abgerundeten Ecken
und heben Sie die Abdeckung vorsichtig ab.
2 Schließen Sie eines der beiden Batteriekabel am Schalten Sie die vier Relais in der Ecke des vorderen
Anschluss des Batteriegehäuses an. Laserscanners ein. Beginnen Sie mit 32 A, d. h. von
außen nach innen.
Das zweite Kabel ist für eine Zusatzbatterie
bestimmt.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 13
•
•
•Erste Schritte
Schritt Aktion
3 Stellen Sie vor dem Wiederaufsetzen der
Abdeckung sicher, dass der Batterietrennschalter
eingeschaltet ist (die gelben Indikatoren stehen
bei „On“).
4 Setzen Sie die Abdeckung wieder vorsichtig auf Montieren Sie die Not-Halt-Box auf der
die Anschlussöffnungen auf. Roboterabdeckung und schließen Sie sie an.
Soll ein Aufsatzmodul auf dem Roboter montiert werden, muss der Not-Halt so platziert
werden, dass er gut erreichbar ist. Siehe Anbringen des Aufsatzmoduls auf Seite 27.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 14
•
•
•Erste Schritte
Schritt Aktion
5 Schließen Sie die Antenne am Anschluss oben auf der Roboterabdeckung an. Entfernen Sie die
Kunststoffkappe vom Anschluss, bevor Sie die Antenne befestigen.
Die Antenne kann abgesenkt und in alle Richtungen gedreht werden, damit sie unter ein
Aufsatzmodul passt.
6 Drücken Sie auf den blauen Ein/Aus-Schalter in Drücken Sie die Rücksetztaste am Not-Halt, wenn
der Ecke, um den Roboter einzuschalten. diese aufleuchtet.
Am Roboter leuchtet kurz ein gelbes
Das Licht des Roboters wechselt nun zu einem
umlaufendes Licht auf. Danach geht der Roboter
konstanten gelben Licht. Dies zeigt an, dass der
in den Not-Halt-Modus, was durch ein rotes
Roboter pausiert und betriebsbereit ist.
Dauerleuchten angezeigt wird.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 15
•
•
•Erste Schritte
4.3 Verbinden
Schritt Aktion
1 Gehen Sie auf einem PC, Tablet oder
Smartphone zum WLAN-Menü,
suchen Sie nach dem Namen Ihres
Roboters und verbinden Sie sich mit
seinem Netzwerk.
Öffnen Sie einen Browser und rufen
Sie mir.com auf.
Melden Sie sich an MiR Robot
Interface an.
Benutzername und
Passwort für die
Anmeldung am WLAN-
Netz des Roboters und an
der Roboterschnittstelle
finden Sie auf dem mit-
gelieferten Passwortblatt,
siehe Lieferumfang auf
Seite 11.
2 Betätigen Sie nach der Anmeldung
die Schaltfläche Manuelle
Steuerung auf dem Joysticksymbol,
um den Roboter in den manuellen
Fahrmodus zu schalten. Verwenden
Sie nun den Joystick, um den Roboter
die Rampe herunterzufahren.
Das Licht des Roboters
wechselt zu blau. Dies
zeigt an, dass sich der
Roboter im manuellen
Modus befindet und mit
dem Joystick gesteuert
werden kann.
3 Es wird empfohlen, den Roboter rückwärts die Rampe herunterzufahren.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 16
•
•
•Erste Schritte
4.4 Aufladen des Roboters
Der Roboter wird mit einer geladenen Batterie ausgeliefert und kann drei Stunden fahren, bevor die
Batterie erneut aufgeladen werden muss. Gehen Sie zum Laden des Roboters mithilfe des
mitgelieferten Ladekabels wie folgt vor:
Schritt Aktion
1 Ziehen Sie die rechte Eckabdeckung heraus. Schließen Sie dann das Ladegerät an die
Hierzu ist die ersten Male möglicherweise Ladebuchse des Roboters und an eine Steckdose
etwas Kraft erforderlich. an. Schalten Sie den Wippschalter am Roboter
ein, um den Ladevorgang zu beginnen.
Um eine schnelle Entladung zu Verwenden Sie nur das originale
vermeiden, wird empfohlen, Ladekabel.
den Roboter während des
Ladevorgangs auszuschalten.
2 Nach höchstens viereinhalb Stunden ist der Roboter voll aufgeladen. Der Roboter zeigt ein
grünes Lichtsignal an, sobald die Batterie voll geladen ist.
3 Schalten Sie den Wippschalter aus und ziehen Sie das Ladekabel vom Roboter ab. Setzen Sie die
Eckabdeckung wieder auf.
Der Roboter erkennt sowohl das Kabel als auch den aktivierten Ladetaster. In beiden
Fällen wechselt der Roboter in den Not-Halt.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 17
•
•
•Erste Schritte
4.5 Testen des Roboters
Vor der Verwendung des Roboters wird empfohlen, alle Komponenten und Prozesse im Roboter auf
ordnungsgemäße Funktion zu testen.
1. Melden Sie sich an MiR Robot Interface an, siehe Verbinden auf Seite 16.
2. Gehen Sie zu Überwachung > Hardwarezustand.
3. Wenn alle Komponenten einer Gruppe in Ordnung sind, ist die Gruppe mit einem grünen Punkt
markiert. Wenn eine oder mehrere Komponenten in einer Gruppe nicht in einem
einwandfreien Zustand sind, wird die Gruppe mit einem gelben oder roten Punkt markiert. Sie
können die Gruppe mit einem Klick auf den grünen Pfeil erweitern und sehen, welche
Komponenten nicht korrekt funktionieren und warum.
Abb. 4.2. Auszug aus dem Menü Hardwarezustand. Meldung: OK zeigt an, dass alle Komponenten der Gruppe in
Ordnung sind.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 18
•
•
•Erste Schritte
4.6 Ausschalten des Roboters
Schalten Sie den Roboter wie folgt ordnungsgemäß ab.
Schritt Aktion
1 Lassen Sie den Roboter anhalten. Drücken Sie auf Warten Sie, bis das Licht am Roboter
den blauen Ein/Aus-Schalter, um den Roboter erloschen ist. Dies zeigt an, dass der
auszuschalten. Das Licht wechselt während des Roboter nun stromlos ist.
Ausschaltvorgangs zu einem gelben,
abklingenden Licht.
Wenn der Roboter für den Transport oder für Wartungs-/Reparaturarbeiten
ausgeschaltet wird, müssen auch der Batterietrennschalter ausgeschaltet und das
Batteriekabel getrennt werden, siehe Einpacken vor dem Transport auf Seite 30.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 19
•
•
•5 Produktvorstellung
••••••
5.1 Über den MiR100™
Der MiR100™ ist ein autonomer mobiler Roboter für den Transporteinsatz innerhalb von Fertigungs-
stätten, Krankenhäusern, Lagerhäusern und vielen anderen Gewerbe- und Industrieumgebungen.
Der Benutzer stellt den Zielort für das jeweilige Transportgut über eine webbasierte
Benutzeroberfläche ein. Der MiR100™ kann dabei mit einer festen Route programmiert werden, auf
Abruf bereitstehen oder Sonderaufgaben ausführen (Missionen). Er kann auch als Teil einer MiR-
Roboterflotte agieren, die zentral von einer einzelnen webbasierten Benutzeroberfläche gesteuert
wird. MiRFleet sollte immer dann verwendet werden, wenn zwei oder mehr Roboter am gleichen
Standort im Einsatz sind.
Der MiR100™ operiert anhand einer Karte, die bei der ersten Verwendung des Roboters
programmiert werden kann. Während des Betriebs stellen Sicherheitsscanner sicher, dass der
Roboter Hindernissen (Menschen, Möbel), die nicht auf der Karte verzeichnet sind, ausweicht. In
der internen Karte sind bestimmte Orte verzeichnet (Büro, Produktlieferung, Werkhalle usw.), die
zur logistischen Planung herangezogen werden können.
Bei Verwendung einer MiRCharge™ Ladestation sucht der Roboter die Ladestation selbstständig auf.
Hierfür müssen lediglich eine Lademission erstellt und ein Ladepunkt auf der Karte angegeben
werden.
Der Roboter wird über eine webbasierte Benutzeroberfläche gesteuert, die in einen Browser auf
einem PC, Smartphone oder Tablet aufgerufen werden kann. Jeder Roboter verfügt über ein eigenes
Netzwerk. Siehe Verbinden auf Seite 16.
5.2 Typenschild
Das Typenschild des MiR100™ befindet sich auf der Rückseite des Batteriegehäuses.
Abb. 5.1. Beispiel eines MiR100™ Typenschilds mit CE-Kennzeichnung
• CE Mobile Industrial Robots ApS erklärt, dass der MiR100™ die
Anforderungen der einschlägigen EG-Richtlinien erfüllt. Siehe
Konformitätserklärung auf Seite 40.
• Serial number Die 15-stellige Seriennummer dient der eindeutigen Identifizierung
(Seriennummer) des Roboters. Die letzten vier Stellen stimmen mit den Ziffern im
Originalnamen des Roboters überein. Beispiel: Wenn die
Seriennummer auf 0635 endet, lautet der Robotername MiR R635.
• MiR100 3.0 Produktname und Hardwareversion.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 20
•
•
•Produktvorstellung
5.3 Äußere Komponenten des MiR100™
Abb. 5.2. Äußere Komponenten des MiR100™
1. Obere Abdeckung 11. Hinter abnehmbarer hinterer Eckabdeckung:
Ladeanschluss mit Schalter
2. Lenkrolle – alle vier Eckräder 12. Hintere Abdeckung
3. Antriebsrad – Differentiallenkung 13. Heck-Laserscanner
4. Hinter abnehmbarer Eckabdeckung: HDMI- 14. Arretieraufnahme – eine in jeder Ecke für die
Anschluss und USB-Serviceanschluss– zum Verbinden Befestigung von Aufsatzmodulen
mit dem Computer des Roboters
5. Scanner-Rücksetztaste (gelb) und Ein/Aus-Schalter 15. RJ45-Ethernetanschluss
(blau)
6. Ultraschallsensoren für die Erkennung 16. An- und Aufbau-Schnittstelle – zum Anschluss
durchsichtiger Objekte (Funktion in Entwicklung) von Zubehör, z. B. einem Haken – siehe auch
Anhang C, Anschlüsse – Pinbelegung auf Seite 36
7. Anschlüsse für Ladestation – zur Aufnahme der 17. Antennenbuchse
Ladestifte an der MiRCharge Ladestation
8. Front-Laserscanner 18. USB-Serviceanschluss– zum Verbinden mit
dem Computer des Roboters
9. 3D-Tiefenkamera 19. Not-Halt-Schnittstelle mit zusätzlicher
Anschlussmöglichkeit kleiner Geräte sowie I5-
Eingang an SICK-Scannern – siehe auch
Anschlüsse – Pinbelegung auf Seite 36
10. Seitenabdeckung
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 21
•
•
•Produktvorstellung
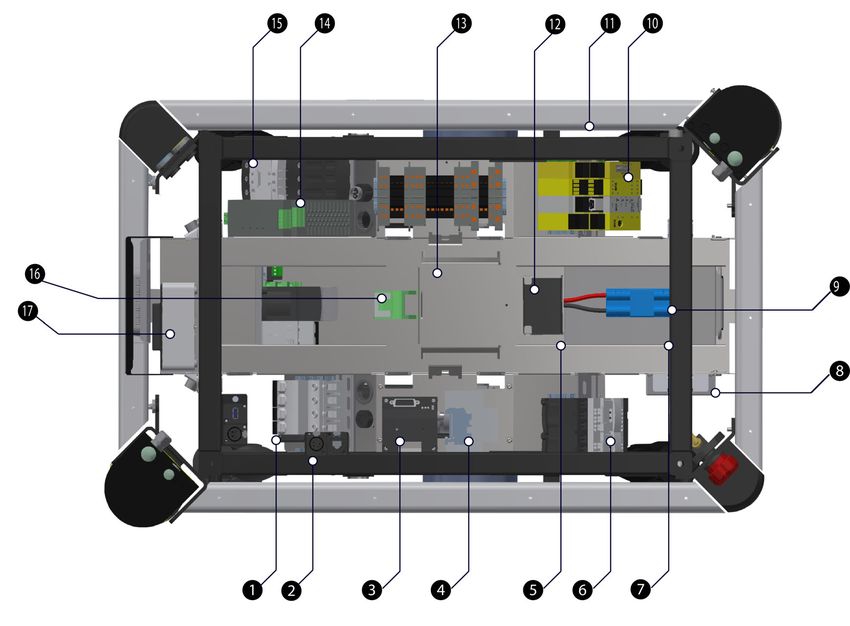
5.4 Innere Komponenten des MiR100™
Abb. 5.3. Innere Komponenten des MiR100™
1. Trenner – automatische Sicherung zwischen 10. SICK-Sicherheits-SPS
Batterie und Komponenten
2. Halbleiterrelais – gibt Selbsthalterelais frei (Pos. 16), 11. Optokoppler – Not-Halt-Signal an
wenn der Roboter herunterfährt Motorsteuergerät
3. Motorsteuergerät – Steuert die beiden Antriebe 12. Lautsprecher
4. Bremsrelais – schließt Motor für schnelleres 13. MiR-Platine – Schnittstellenplatine für
Bremsen kurz Gyroskop, Beschleunigungsmesser, Ultraschall,
Licht, Ein/Aus-Kreis und CAN-Bus-
Kommunikation
5. Batterieanschluss für Zusatzbatterie 14. 24-V-Netzteil – sorgt für stabile
Spannungsversorgung von PC und SPS
6. Redundante Stromversorgung für Relais des 15. Selbsthalterelais – aktiviert das 24-V-Netzteil
Motorsteuergeräts (gesteuert von SICK) beim Einschalten des Roboters
7. CAN-Bus-Anschluss für Batterie-Management- 16. Überspannungsschutz – schützt die
System, Datenprotokollierung, z. B. Anzahl der Schaltkreise der Netzteile vor der Aufnahme von
Ladezyklen; Spannungsspitzen von der Batterie oder
siehe MiR Robot Interface 2.0 Referenzanleitung Aufbauten
8. Router – lokales Netzwerk, 2,4 und 5 GHz 17. NUC-Computer
9. Batterie mit Anschluss –
Hauptspannungsversorgung des Roboters
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 22
•
•
•Produktvorstellung
5.5 Sensorsysteme
Der MiR100™ verfügt über mehrere interne und externe Sicherheitssensoren, mit denen ein
sicherer Betrieb zwischen Menschen und Ausrüstung gewährleistet wird.
Externe Externe Sensoren (siehe auch Äußere Komponenten des MiR100™ auf Seite 21):
Sensoren
• 3D-Kamera Intel RealSense™ Erkennung von Objekten vor dem Roboter:
• 0–1950 mm voraus
• 50-995 mm über dem Boden
• SICK-Sicherheits-Laserscanner S300 (vorne Optischer 360°-Schutz
und hinten)
• Ultraschallscanner (4 St.) Funktion zur Erkennung durchsichtiger Objekte in
Entwicklung
Die Kamera zeichnet nur 3D-Punktwolkendaten auf. Sie erstellt keine Filmaufnahmen.
Die zwei Laserscanner, die diagonal zueinander an einer vorderen und hinteren Ecke angebracht
sind, bieten einen 360°-Schutz bis in 1 Meter Entfernung zum Roboter.
Die Größe der Sicherheitsbereiche ist dynamisch und ändert sich mit der Geschwindigkeit des
Roboters.
Abb. 5.4. Sichtfelder von 3D-Kamera und Laserscannern sorgen für Rundum-Sicherheit um den Roboter
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 23
•
•
•Produktvorstellung
Abb. 5.5. Laserscanner erkennen Objekte 200 mm über dem Boden; die 3D-Kamera erkennt Objekte von Bodenhöhe
bis in 995 mm Höhe über dem Boden
Sicherheits- Die MiR-Sicherheitsbereiche ändern sich in Abhängigkeit von der Geschwindigkeit des Roboters.
bereiche
Die Geschwindigkeit und Bereichsgröße in den Sicherheitsbereichen sind für den Frontscanner wie
folgt geregelt:
Bereichsname Mindestgeschwindigkeit Höchstgeschwindigkeit Bereichsgröße
Front Field Set 1 -1,4 m/s 0,1 m/s 5 cm
Front Field Set 2 0,11 m/s 0,4 m/s 18 cm
Front Field Set 3 0,41 m/s 0,68 m/s 33 cm
Front Field Set 4 0,69 m/s 1,1 m/s 48 cm
Front Field Set 5 1,11 m/s 2,0 m/s 76 cm
Die Geschwindigkeit und Bereichsgröße in den Sicherheitsbereichen sind für den Heckscanner wie
folgt geregelt:
Bereichsname Mindestgeschwindigkeit Höchstgeschwindigkeit Bereichsgröße
Rear Field Set 1 -0,1 m/s 1,8 m/s 5 cm
Rear Field Set 2 -0,15 m/s -0,2 m/s 14 cm
Rear Field Set 3 -0,21 m/s -0,4 m/s 18 cm
Rear Field Set 4 -0,41 m/s -1,5 m/s 28 cm
Der Roboter verwendet die Daten der Laserscanner für die dynamische Objektidentifizierung bis in
eine Entfernung von 2,5 m vom Roboter. Er versucht, Objekte in einem Umkreis von 2,5 m aktiv zu
umfahren. Beachten Sie, dass die Scanner nur Objekte in einer Höhe von 0,2 m sehen können. Tiefer
oder höher liegende Objekte werden nicht erkannt. Direkte Sonneneinstrahlung kann die Scanner
stören.
Interne Interne Sensoren (siehe auch Innere Komponenten des MiR100™ auf Seite 22):
Sensoren
• Gyroskop (IMU) Misst die Ausrichtung und Winkelgeschwindigkeit des Roboters.
• Motordrehgeber Liefert Drehzahl- und/oder Positionssignale der Motorwelle in
einem geschlossenen Regelkreis.
• Beschleunigungsmesser Misst die nichtgravitative Beschleunigung.
• Raddrehgeber Erkennt Radbewegungen.
Sowohl das Gyroskop als auch der Beschleunigungsmesser befinden sich auf der MiR-Platine.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 24
•
•
•Produktvorstellung
5.6 Leuchtanzeigen
Die Leuchtanzeigen des MiR100™ zeigen den aktuellen Betriebszustand an. Die Farben können
individuell angepasst werden. Die folgende Beschreibung entspricht dem Auslieferungszustand des
Roboters.
Abb. 5.6. MiR100™ Leuchtanzeigen
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 25
•
•
•Produktvorstellung
5.7 Wichtigste Features des MiR100™
• Fahren an stark frequentierten Orten
Der Roboter ist für den Betrieb unter Menschen konzipiert.
• Gesamtroutenplanung und lokale Anpassungen
Der Roboter plant eine allgemeine Route zum Zielort. Trifft der Roboter auf Hindernisse, die
nicht in der Karte verzeichnet sind (z. B. Menschen oder Gegenstände), wird die Route
angepasst.
• Ton- und Lichtsignale
Der Roboter zeigt über Licht- und Tonsignale ständig seinen aktuellen Modus an, z. B. Warten
auf einen Auftrag, Fahren zum Ziel, Ziel erreicht, Alarmmodus.
• Planen von Fahrten und Annehmen von Paketen
Mithilfe einer über PC, Smartphone oder Tablet aufrufbaren Webschnittstelle kann der Roboter
einfach überwacht und bedient werden.
• Alarm bei „Verfahren“
Falls der Roboter den sicheren Weg zum Ziel nicht mehr findet, hält er an und schaltet die
umlaufende gelb-violette Fehlerbeleuchtung ein. In diesem Fall kann eine benutzerdefinierte
Nachricht erzeugt werden, um bestimmte Personen zu alarmieren oder andere Maßnahmen zu
ergreifen.
• Automatische Verlangsamung bei Hindernissen
Die integrierten Sensoren verlangsamen den Roboter, wenn Hindernisse vor dem Roboter
erkannt werden.
• Gewährleistung eines optimalen Untergrunds
Der Roboter ist für einen Betrieb auf einem ebenen, trockenen Untergrund mit einer Neigung
von höchstens 5 % ausgelegt. Die Sensoren erkennen Gegenstände, die über 50 mm über den
Boden ragen, und meiden diese.
• Interne Karte
Der MiR100™ verwendet eine interne Karte zur Routenplanung. Der Roboter kann einen
Grundriss aus einem CAD-System verwenden oder selbst eine Karte erstellen, während der
Benutzer das Fahrzeug von Hand durch den gesamten Bereich steuert, in dem der Roboter
eingesetzt werden soll. Die Robotersensoren erkennen Wände, Türen und Möbel und erstellen
anhand dieser Daten eine Karte. Nach der Erstellung der Karte können im Karteneditor
Positionen und andere Merkmale hinzugefügt werden.
• MiRHook
Der MiR100™ kann mit einem Haken ausgerüstet werden, mit dem der Roboter Transportwagen
mit einer Nutzlast von bis zu 300 kg ziehen kann.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 26
•
•
•6 An- und Aufbauten
••••••
6.1 Übersicht
Der MiR100™ kann für eine optimale Anpassung an seinen Einsatzzweck mit einer Reihe von An-
und Aufbauten ausgestattet werden. Einige werden kundenseitig bereitgestellt, andere können
direkt von Mobile Industrial Robots bezogen werden.
Anweisungen zur Montage eines An- oder Aufbaus, etwa der Aufsatzkamera, finden Sie in der
jeweiligen Anleitung. Diese finden Sie auf der Website von Mobile Industrial Robots oder wenden
Sie sich an Ihren Händler.
Im Folgenden werden die allgemeinen Regeln zur Montage eines Aufsatzmoduls beschrieben.
6.2 Anbringen des Aufsatzmoduls
Aufsatzmodule müssen mit den selbstanziehenden konischen Arretieraufnahmen an den Ecken des
Roboters mit dem passenden Anzugsmoment befestigt werden. Dieses beträgt: 47 Nm.
Abb. 1. Aufsatzmodule werden mithilfe der Arretieraufnahmen in der oberen Abdeckung befestigt.
Vor dem Hinzufügen des Aufsatzmoduls muss die Not-Halt-Box entfernt und so auf dem
Aufsatzmodul angebracht werden, dass sie leicht erreicht werden kann. Die richtige Position
muss im Einzelfall unter Berücksichtigung der potentiellen Risiken ermittelt werden. Die
Anforderungen der harmonisierten Norm EN ISO 13850 müssen beachtet werden.
Beachten Sie die Grenzwerte für Gewicht und Nutzlastschwerpunkt, siehe
Nutzlastspezifikationen auf Seite 32.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 27
•
•
•7 Wartung
••••••
7.1 Übersicht
Die folgenden Wartungspläne geben einen Überblick über die regelmäßigen Reinigungs- und
Austauscharbeiten.
Die angegebenen Intervalle dienen als Richtschnur. Die tatsächlichen Intervalle hängen von
der Betriebsumgebung und der Nutzungshäufigkeit des Roboters ab.
7.1.1 Regelmäßige Prüfungen und Wartungsmaßnahmen
Wöchent- Führen Sie einmal in der Woche die folgenden Wartungsmaßnahmen aus:
lich
Teile Wartungsmaßnahme
Roboterabdeckung und -seiten Außenseite des Roboters mit einem feuchten Tuch reinigen.
Keine Druckluft verwenden.
Laserscanner Für optimale Leistung die optischen Flächen der Scanner
reinigen. Keine aggressiven oder scheuernden
Reinigungsmittel verwenden.
Staubpartikel werden von optischen Flächen
angezogen, wenn diese statisch geladen sind.
Dieser Effekt kann durch die Verwendung des
antistatischen Kunststoffreinigers (SICK-
Artikelnr. 5600006) und des SICK-Linsentuchs
(Artikelnr. 4003353) verringert werden. Siehe separate
Herstellerdokumentation.
Lenkrollen (alle vier Eckräder) Schmutz mit einem feuchten Tuch entfernen und sicherstellen,
dass sich nichts an den Rädern aufgewickelt hat.
Antriebsräder (die beiden Räder in Schmutz mit einem feuchten Tuch entfernen und sicherstellen,
der Mitte) dass sich nichts an den Rädern aufgewickelt hat.
LED-Leuchtband Prüfen, ob das LED-Lichtband unbeschädigt ist (leuchtet das
Licht überall um den Roboter herum auf?).
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 28
•
•
•Wartung
7.1.2 Regelmäßige Prüfungen und Austauschmaßnahmen
Vor Austauscharbeiten, bei denen die obere Abdeckung entfernt werden muss:
• Drücken Sie auf den Ein/Aus-Schalter, um den Roboter auszuschalten.
• Drücken Sie den Batterietrennschalter, um die Batterie stromlos zu schalten.
• Nehmen Sie die Abdeckung ab und trennen Sie das ESD-Kabel, falls eingebaut, siehe
Verbinden on page 16.
• Schalten Sie alle Relais aus und trennen Sie die Batterie, siehe Einschalten on page 13.
Teil Wartung Intervall
Roboterabdeckung Auf Risse prüfen. Monatlich prüfen und bei Bedarf
austauschen.
Montage prüfen. Sitzt die Abdeckung
eben auf dem Roboter und sind die
Anschlüsse zugänglich?
Lenkrollen (alle vier Lager prüfen und anziehen. Wöchentlich prüfen und bei
Eckräder) Bedarf austauschen.
Antriebsräder (die Laufflächen der Räder auf Verschleiß Alle sechs Monate prüfen und
beiden Räder in der prüfen. bei Bedarf austauschen.
Mitte)
Der Roboter muss
nach dem Austausch
der Räder kalibriert
werden.
Scanner Auf sichtbare Schäden, z. B. Risse oder Bei Bedarf austauschen.
Kratzer, prüfen.
Der Roboter muss
nach dem Austausch
der Scanner
kalibriert werden.
Not-Halt Zur Prüfung der Not-Halt-Funktion den Alle drei bis vier Monate / gemäß
roten Taster drücken und prüfen, ob die EN ISO 13850 Sicherheit von
Rücksetztaste aufleuchtet. Maschinen – Not-Halt-Funktion.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 29
•
•
•8 Einpacken vor dem Transport
••••••
8.1 Vorbereitungen
Verpackung Verwenden Sie für den Transport des Roboters die Original-Verpackung.
Abb. 8.1. Die Original-Verpackung besteht aus dem Palettenboden und -deckel, den Rahmenteilen
sowie den seitlichen und oberen Schaumstoffeinsätzen.
Batterie Die Lithium-Batterie unterliegt Transportbeschränkungen, siehe Warnhinweis weiter unten. Wenn
der Roboter zur Wartung oder Reparatur eingesandt werden soll, muss der Batteriestecker von der
Batterie getrennt werden.
Für Lithium-Batterien gelten gemäß den Empfehlungen der Vereinten Nationen über die
Beförderung gefährlicher Güter, UN 3171 besondere Transportvorschriften. Zur Einhaltung
der Vorschriften sind spezielle Transportpapiere erforderlich. Dies kann Einfluss sowohl auf
die Transportzeit als auch die Transportkosten haben.
Je nach Transportart, wie etwa Land-, See- oder Lufttransport, gelten verschiedene Vorschriften. Weitere
Informationen erhalten Sie von Ihrem Händler.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 30
•
•
•Einpacken vor dem Transport
8.2 Einpacken des Roboters
Vor dem Einpacken des Roboters muss dieser wie folgt ausgeschaltet werden:
1. Halten Sie den Roboter an und drücken Sie den blauen Ein/Aus-Schalter, um den Roboter
auszuschalten.
2. Schalten Sie den Batterietrennschalter aus (die beiden gelben Indikatoren stehen bei „Off“).
Führen Sie zum Einpacken des Roboters die unter “Auspacken des MiR100™” auf Seite 12
beschriebenen Schritte in umgekehrter Reihenfolge durch.
Der Roboter muss stets in aufrechter Position verpackt und transportiert werden. Das
Verpacken und Transportieren des Roboters in einer anderen Position führt zum
Erlöschen der Garantie.
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 31
•
•
•A Nutzlastspezifikationen
••••••
Die nachfolgenden Zeichnungen veranschaulichen die Schwerpunktvorgaben für einen sicheren
Betrieb bei verschiedenen Nutzlasten.
Die Spezifikationen gelten für Nutzlasten von:
• 25 kg
• 50 kg
• 75 kg
• 100 kg
1400 1400
1200 1200
1000 1000
800 800
600 600
400 400
200 200
0 200
200 400 600
400 800 600
1000 0 200
200 400 600
400 800 600
1000
Units: mm
25kg payload
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 32
•
•
•1400 1400
1200 1200
1000 1000
800 800
600 600
400 400
200 200
0 200
200 400 600
400 800 600
1000 0 200
200 400 600
400 800 600
1000
Units: mm
50kg payload
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 33
•
•
•1400 1400
1200 1200
1000 1000
800 800
600 600
400 400
200 200
0 200
200 400 600
400 800 600
1000 0 200
200 400 600
400 800 600
1000
Units: mm
75kg payload
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 34
•
•
•1400 1400
1200 1200
1000 1000
800 800
600 600
400 400
200 200
0 200
200 400 600
400 800 600
1000 0 200
200 400 600
400 800 600
1000
Units: mm
100kg payload
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 35
•
•
•B Anschlüsse – Pinbelegung
••••••
B.1 An- und Aufbau-Schnittstelle
Polnummer Signalbezeichnung Max. Stromstärke Anmerkungen
1 Batteriespannung 3A Startet mit dem Roboter
2 Batteriespannung 3A Startet mit dem Roboter
3 Batteriespannung 10A Stoppt per Not-Halt
4 GND 10A Masse
Abb. 1. An- und Aufbau-Schnittstelle
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 36
•
•
•B.2 Not-Halt
Polnummer Signalbezeichnung Anmerkungen
1 DIN 19
2 DIN 14
3 DIN 70
4 Not-Halt, 1, grün
5 Not-Halt, 2, grün-weiß/rot
6 Rücksetztaste, braun-weiß
7 SICK XTIO, Q3 Für Sick-Scanner
8 I5 Für Sick-Scanner
9 GND Zur Verwendung mit 24-V-Signal von Pol 10
10 24 V, max. 1 A Kann zum Anschluss kleiner externer Geräte mit
bis zu 1 A verwendet werden, z. B. Tablets oder
SPS-Schnittstellen
Muss GND von Pol 9 verwenden
Abb. 2. Not-Halt-Schnittstelle
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 37
•
•
•C Zertifikate
••••••
C.1 Partikelemissionen (Reinraum)
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 38
•
•
••
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 39
•
•
•D Konformitätserklärung
••••••
•
•
MiR100™ Betriebsanleitung, Robot Interface 2.0, 01/2019 v.1.2 • 40
•
•
•Sie können auch lesen

















































