ENTWICKLUNG EINER METHODIK ZUR AKUSTIKBERECHNUNG UND
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Deutscher Luft- und Raumfahrtkongress 2020 DocumentID: 530252 ENTWICKLUNG EINER METHODIK ZUR AKUSTIKBERECHNUNG UND INTEGRATION IN EIN MULTIROTOR-VORENTWURFSTOOL M. Kränzler Robert Bosch GmbH, Corporate Research, Robert-Bosch-Campus 1, 71272 Renningen, Deutschland M. Valley Masterstudent der RWTH Aachen University, Wüllnerstraße 7, 52062 Aachen, Deutschland S. Hille, E. Stumpf Institut für Luft- und Raumfahrtsysteme der RWTH Aachen University, Wüllnerstraße 7, 52062 Aachen, Deutschland Zusammenfassung Der Markt senkrechtstartfähiger Fluggeräte ist zurzeit stark in Bewegung. Moderne elektrische Antriebe erweitern den Lösungsraum für den Entwurf deutlich. Entwicklungen mit mehreren verteilten Antrieben wie z.B. Multirotorkonfigurationen ermöglichen auch Einsatzzwecke im urbanen Raum, bei denen die soziale Akzeptanz von zentraler Bedeutung ist. Insbesondere die Lärmemission ist einer der wichtigsten Aspekte. Daher soll diese bereits im Vorentwurfsprozess bestmöglich berücksichtigt werden. Im Rahmen der hier vorgestellten Untersuchung wird eine schnellrechnende Methodik auf Basis der von Ffowcs-Williams und Hawkings entwickelten Gleichung zur Berechnung von Rotorlärm vorgestellt. Diese wird in den Vorentwurfszyklus eines Auslegungsprogramms für elektrisch angetriebene Vertical TakeOff and Landing (eVTOL) Fluggeräte implementiert. Anhand von experimentellem Daten wird die Simulation abgeglichen. Für drei Multirotor-Konfigurationen wird eine Lärmsimulation exemplarisch angewendet. Keywords Aeroakustik, Rotorlärm, Multirotor, eVTOL, Vorentwurf werden. Dies hat nicht nur Auswirkungen auf die Effizienz 1. EINLEITUNG der Fluggeräte, sondern auch auf die akustische Signatur. Elektrisch angetriebene, senkrechtstartfähige Fluggeräte In einem frühen Entwurfsstadium können eröffnen zahlreiche neue Anwendungsmöglichkeiten. Das Auslegungsparameter noch bestmöglich mit geringen Einsatzspektrum reicht von kleinen, unbemannten Folgekosten angepasst werden. Daher sollte bereits in Multirotorsystemen, bis hin zu elektrisch angetriebenen diesem Stadium neben der Flugleistung die Akustik Vertical TakeOff and Landing (eVTOL) Fluggeräten für den bewertet werden. Für die Ermittlung des Flugzeuglärms bei Personentransport. Viele Einsatzmöglichkeiten, wie zum klassischen Drachenkonzepten existieren empirische Beispiel der Air Taxi Transport, aber auch der Berechnungsmodelle. Da zur Zeit jedoch nur eine sehr Gütertransport mittels unbemannten Multirotorsystemen geringe Zahl an eVTOL-Fluggeräten existiert, liegen hierfür haben gemeinsam, dass sie primär in der Nähe von noch keine vollständig empirischen Modelle vor, um den besiedeltem Gebiet betrieben werden. Dadurch spielt eine Lärm des gesamten Luftfahrzeugs zu bestimmen. Daher möglichst geringe Lärmbelastung in der Nähe von Start- wird in dieser Studie ein Lärmmodell untersucht, das den und Landeplätzen eine große Rolle, um die Störwirkung auf Rotorlärm mittels semi-empirischer Modelle berechnet. Es den Menschen zu reduzieren [1; 2]. Verschiedene eVTOL kann davon ausgegangen, dass der Rotorlärm die Betreibermodelle sehen Start- und Landeflächen direkt dominierende Lärmquelle bei einem Multirotorsystem ist innerhalb der Stadt vor [3]. Damit gewinnt eine geringe und den Lärm der elektrischen Motoren übersteigt [5]. Lärmbelastung weiter an Wichtigkeit, weswegen derartige Dieser Anteil des Gesamtlärms soll rechnerisch erfasst Fluggeräte möglichst leise auszulegen sind. Der werden. Im Flugzeugentwurf kann der Lärm mit Methoden Entwurfsraum für eVTOLs und Multirotor-Fluggeräte ist, wie dem Integrated Noise Model (INM) der Federal Aviation bedingt durch die flexible Konfiguration der Administration oder Parametric Aircraft Noise Analysis Antriebsstränge, sehr groß [4]. Es können sowohl Module (PANAM) des DLRs ermittelt werden [6; 7]. unterschiedliche Rotorblattgeometrien, als auch Derartige Tools existieren für eVTOLs noch nicht. In verschiedene Durchmesser zum Einsatz kommen und Bertsch [7] werden hybride Methoden beschrieben, die sich auch die Anzahl und Anordnung der Rotoren kann variiert dadurch auszeichnen, dass der Flugzeuglärm in seine ©2020 1 doi:10.25967/530252
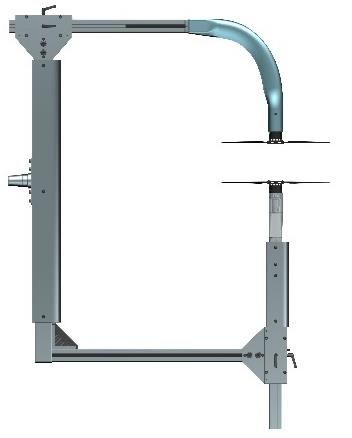
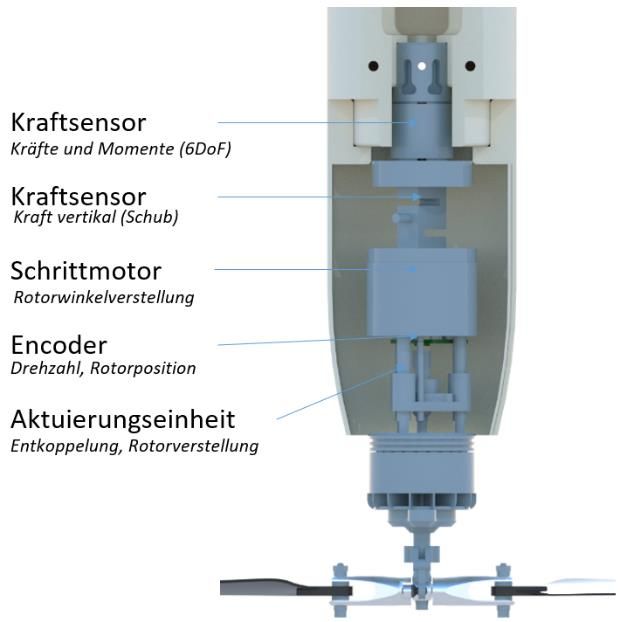
Deutscher Luft- und Raumfahrtkongress 2020 zurück. Alternativ kann die Simulation auch als separates Modus zur Regelung des Stroms und ein Modus zur Modul genutzt werden, um Parameterstudien mit Drehzahlregelung. Im Prüfstandsbetrieb wird in der Regel verschiedenen Rotorgeometrien und Betriebspunkten zu der Modus zur Drehzahlregelung eingesetzt, um stationäre erstellen. Die Zielsetzung für die Lärmsimulation ist dabei Drehzahlen für die Messung zu erreichen. der relative Vergleich verschiedener Konfigurationen. Der schematische Ablauf der gesamten Lärmsimulation wird in BILD 3 dargestellt. Ist die Vorauslegungsiteration vorangestellt, werden sämtliche benötigten Daten aus dem Startsegment der definierten Flugmission übernommen. Wird ein manueller Start durchgeführt, müssen Rotationsgeschwindigkeit, Rotorgeometrie und Konfiguration über eine externe Eingabemaske angegeben werden. Die Rotorgeometrie beinhaltet dabei sowohl die Abmessungen des Blattes als auch Einstellwinkel und Profil der einzelnen Blattelemente. Damit sind alle Bestandteile der Schallberechnung bekannt und die Berechnung kann erfolgen. Zunächst wird die geometrische Position des Blattelementes bestimmt. Ausgehend von der Startposition, wird der Rotor entsprechend des Beobachterzeitvektors BILD 4. Mechanischer Aufbau des Rotorprüflings gedreht. Es können sowohl Rotoren, die im Uhrzeigersinn rotieren, als auch gegen den Urzeigersinn rotieren, Die Rotorblätter, die sowohl im Experiment, als auch in der berechnet werden. Die Vektoren der Rotationsmachzahl Simulation untersucht werden, sind einem DJI S1000+ werden über die angegebene Rotordrehzahl bestimmt. Für Octocopter entnommen. Wie in BILD 5 dargestellt, ist das den Vektor des Auftriebs wird die Polare des Rotorprofils Blatt stark zugespitzt. Über den Blattradius ist es durch das Programm XFoil [13] berechnet. Anschließend kontinuierlich verwunden. wird der benötigte Auftriebskoeffizient ausgewählt und somit der Auftrieb bestimmt. Die Lage im Raum wird über die geometrischen Beziehungen des Rotorblatts bestimmt. Für alle diese Annahmen ist ein stationärer Flugzustand erforderlich. Außerdem wird kein Turbulenzmodell verwendet. Die Berechnung für die einzelnen Blattelemente liefert schließlich ein Schalldrucksignal, das entsprechend der Formel 2 mit den weiteren Signalen verrechnet wird. BILD 5. Gescanntes Rotorblatt des Herstellers DJI Das Endsignal wird dann mit Hilfe einer Fourier-Analyse zerlegt und der Gesamtpegel des Mikrofons in dB Das Rotorblatt wurde mittels eines optischen errechnet. Die Ausgabe der Ergebnisse erfolgt in Form Scanverfahrens digitalisiert und das Profil an mehreren einer Spektralverteilung und optional als radiale Schnitten ermittelt. Dadurch ist die vollständige Pegelverteilung. Blattgeometrie mit Profil, Zuspitzung und Verwindung über den Radius bekannt. In BILD 6 ist der Profilschnitt dargestellt, welcher als Basis für die anschließende 3. EXPERIMENTELLES SETUP FÜR DIE Simulation dient. VALIDIERUNG Die experimentelle Verifizierung der Simulation erfolgt an einem Rotorprüfstand für Rotoren von Unmanned Aerial Vehicles (UAV). Der Prüfstand ist derart ausgestattet, dass sowohl Einzelrotoren im Schwebeflugfall untersucht werden können, als auch Koaxial- und Multirotoranordnungen [14]. Es können Rotoren bis zu BILD 6. Ermittelter Profilschnitt des untersuchten einem Durchmesser von 400 mm Durchmesser zum Rotorblatts mit dimensionslosen Einheiten Einsatz kommen. Die Rotorblätter sind in einer verstellbaren Nabe montiert. Dadurch lassen sich die Einstellwinkel der Blätter stufenlos 3.1. Mechanischer Aufbau des Rotorprüfstands ändern. Der Gesamtdurchmesser der Rotorblätter inklusive Nabe und Blatthalter beträgt 400 mm. Der Rotorprüfstand besteht aus zwei Rotorsystemen, welche in BILD 4 dargestellt sind. Als Rotorsystem wird die Wie in BILD 7 dargestellt, besteht die Rotoreinheit aus Antriebseinheit, bestehend aus Elektromotor und Inverter einem Schrittmotor, welcher die Aktuierungseinheit in bezeichnet, sowie eine Blattverstellung mit vertikaler Richtung verschiebt. Diese Einheit verfügt über Aktuierungseinheit und den Rotorblättern. Der Motor des einen Entkoppler welcher das stehende mit dem Typs DJI 4114 hat eine elektrische Maximalleistung von rotierenden System des Rotors mechanisch koppelt. Über 500 W. Als Inverter kommt ein Herkules 5 des Herstellers eine in der Hohlwelle des Motors laufende Schubstange HERSI Electronic Development GmbH & Co. KG zum wird der Blattverstellmechanismus betätigt. Damit kann der Einsatz. Dieser kann den Elektromotor in verschiedenen Einstellwinkel der Rotorblätter verändert werden. Betriebsarten ansteuern. Hierzu gehört zum Beispiel ein ©2020 4
Deutscher Luft- und Raumfahrtkongress 2020 Frequenz in Hz 100 400 800 1000 1600 2500 Absorptionswert 13% 45% 74% 84% 90% >95% TABELLE 1: Absorptionswerte des Noppenschaumstoffs Basotect G+ [15] Für die Bestimmung der akustischen Signale werden drei Klasse 1 Messmikrofone mit einer 1/2“ Membran vom Typ MTG MM 215 eingesetzt. Die Messmikrofone werden mit einem 4-Kanal Frontend SQobold der HEAD acoustics GmbH abgehört. Die Daten werden mittels der Software ArtemiS Suite ausgewertet. Die Mikrofone sind im Messaufbau so angeordnet, dass ein Mikrofon in der Rotorebene im Abstand zur Rotornabe von 800 mm liegt. Das zweite und dritte Mikrofon sind im selben Abstand angeordnet, jedoch mit einem Winkel von 15° bzw. 50° unterhalb der Rotorebene. Mit den beiden unteren BILD 7. Elektromechanische Einheit zur Mikrofonen kann die Abstrahlcharakteristik der Rotorblattverstellung Schallquellen nach unten zum Beobachter analysiert 3.2. Kraftmesstechnik werden. Diese Positionen sind daher besonders relevant, da sich der Beobachter an einem real ausgeführten UAV oder eVTOL in der Regel bei Start und Landung unterhalb Die Kräfte und Momente, welche der Rotor erzeugt, werden der Rotorebene befindet. von jeweils zwei Kraftsensoren erfasst. Es handelt sich dabei zum einen um einen Kraftsensor für sechs Freiheitsgrade des Typs K6D27 des Herstellers ME- 4. ERGEBNISBETRACHTUNG AKUSTIK- Messsysteme. Dieser kann sowohl Kräfte in allen drei SIMULATION Richtungen, als auch Momente um drei Achsen erfassen. Der Sensor kann eine maximale Kraft in Schubrichtung von Die in Kapitel 2 beschriebene Simulationsmethodik wird in 50 N messen und ein maximales Motordrehmoment von diesem Kapitel mit den am zuvor beschriebenen 1 Nm bei einer Genauigkeit von 0,005 Nm. Zusätzlich ist Rotorprüfstand ermittelten Daten abgeglichen. Im ein separater Sensor zur Messung des Schubs, wie in BILD Anschluss wird für ausgewählte Multirotor-Konfigurationen 8 dargestellt, verbaut. Durch die isolierte Schubmessung gezeigt, dass sich die akustischen Eigenschaften sowohl im kann die Genauigkeit optimiert werden. Es handelt sich Schwebeflug, als auch für den Steigflug berechnen lassen. dabei um den Sensor KD24s desselben Herstellers mit Zudem wird ein Vergleich zwischen den Konfigurationen einer Nennkraft von 50 N bei einer Genauigkeit von 0,1%. durchgeführt, wie er für den Vorentwurf zur akustischen Bewertung in einer frühen Phase relevant ist. 4.1. Betrachtung der Diskretisierung und Rechenzeit Ein Vorteil der vorgestellten Methode soll die schnelle Bewertung von unterschiedlichen Konzepten sein. Daher spielt eine geringe Rechenkomplexität und damit verbunden kurze Rechenzeiten, eine große Rolle für die Eignung des Tools im Vorentwurf. In diesem Abschnitt wird der Einfluss der Diskretisierung anhand der in Kapitel 2 beschriebenen revolution steps untersucht. Es wird das Residuum betrachtet. Dieses ergibt sich, wie in Formel 3 dargestellt aus der Differenz des Schalldruckpegels für die maximale Anzahl an durchgeführten Iterationen = 128 und dem errechneten Schalldruckpegel der aktuellen Iteration . Diese Differenz wird in Relation zum Schalldruckpegel bei = 128 gesetzt. Diese Berechnung erfolgt unter der Annahme, dass sich die BILD 8. Mess- und Aktuierungseinheit des oberen Ergebnisse für hoher Werte von einem Grenzwert Rotorsystems annähern. 3.3. Akustikmesstechnik ( = 128) − ( ) ( ) = (3) Der Rotorprüfstand wird in einer akustischen Kammer mit ( = 128) einer Länge von 2,5 m, einer Breite von 1,8 m und einer Höhe von 3,0 m betrieben. Die Prüfkammer ist mit Basotect In BILD 9 ist der Einfluss der revolution steps auf die G+ Noppenschaumstoff mit den in TABELLE 1 Genauigkeit der Simulation des Schalldruckpegel dargestellten Herstellerangaben vollständig ausgekleidet. dargestellt. Es ist das Residuum über der Anzahl der revolution steps aufgetragen. ©2020 5
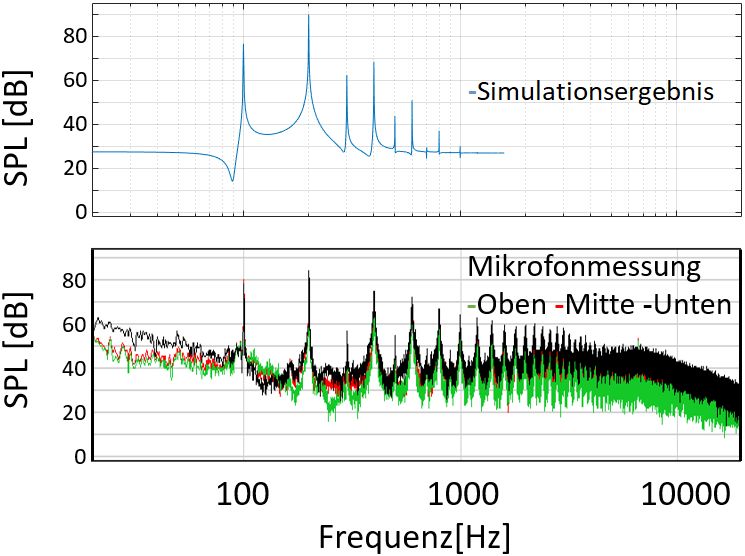
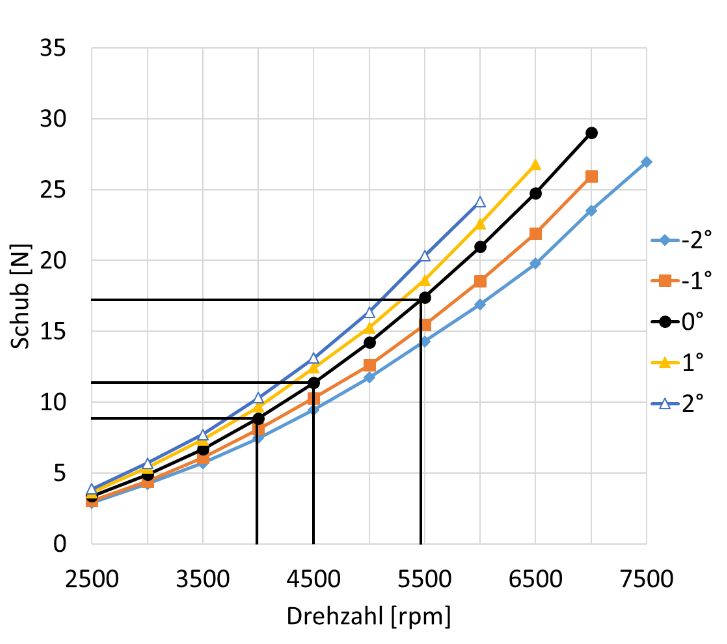
Deutscher Luft- und Raumfahrtkongress 2020 In BILD 10 ist im oben dargestellten Plot das Schalldruck (SPL)-spektrum der Simulation dargestellt. In der unteren Hälfte des Bildes ist die Messung mit drei ausgewählten Mikrofonen dargestellt. Die Messergebnisse zeigen ein tonal geprägtes Spektrum, der Breitbandlärmmaximum liegt in den meisten Messpunkten mehr als 20 dB unter dem der ersten Haupttöne. Bei der hier visualisierten Messung sind die tonalen Anteile deutlich dominant. Relevanz erreicht der Breitbandanteil bei Messungen von hohen Anstellwinkeln. Hierbei ist jedoch ein Effizienzeinbruch in den Messungen erkennbar und es liegt kein, für den Rotorentwurf, relevanter Betriebsbereich mehr vor. Das Simulationsmodell für den tonalen Anteil erreicht in den ersten beiden Haupttönen eine Genauigkeit zur Messung von ± 5 dB. Dies ist in BILD 10 bei einer Frequenz von 100 Hz deutlich zu erkennen. Die folgenden Töne klingen BILD 9. Einfluss der revolution steps auf das Residuum etwas schneller ab, als dies in der Messung ermittelt wird. und auf die Rechenzeit Da der Gesamtschallpegel jedoch durch die stärksten Schallquellen dominiert wird, liegt die Genauigkeit des Es zeigt sich, dass sich der Schalldruckpegel für eine sehr Gesamtschallpegels ebenfalls bei ± 5 dB. kleine Auflösung der Rotorumdrehung deutlich unterscheidet und das Ergebnis daher nur eine Nachdem der Abgleich des Spektrums eine gute unzureichende Genauigkeit erreicht. Ab einer Auflösung Übereinstimmung für den tonalen Anteil gezeigt hat, wird der Umdrehungsschritte von 16 weist das Ergebnis nur das qualitative Verhalten der Simulation betrachtet. Es ist noch einen minimalen Fehler auf und das Residuum geht bekannt und hat sich auch im Experiment bestätigt, dass gegen null. Es kann daher angenommen werden, dass eine mit steigender Blattspitzenmachzahl der Schalldruckpegel Auflösung der revolution steps von 64 für einen typischen zunimmt. Dieses grundlegende, qualitative Verhalten muss Anwendungsfall ein geeigneter Wert ist. Für die Simulation die Simulation ebenfalls abbilden. Hierfür wurde der Rotor anderer Rotoren sollte eine derartige Analyse erneut für Drehzahlen zwischen 2500 rpm und 7000 rpm in durchgeführt werden, um eine hierfür passende Auflösung 500 rpm Schritten simuliert. In BILD 11 sind die zu ermitteln. Im nächsten Schritt wird die mit den revolution zugehörigen Simulationsergebnisse dargestellt, sowie die steps korrelierende Rechenzeit betrachtet. In BILD 9 ist zu experimentellen Daten für unterschiedliche Drehzahlen. erkennen, dass die Rechenzeit nahezu linear mit der Auflösung zunimmt. Auf einem Vierkern-Prozessor mit 3,4 Ghz pro Kern, liegt die Rechenzeit bei 311 Sekunden für die zuvor definierte revolution steps von 64. 4.2. Abgleich der Simulation mit der Einzelrotormessung an einem ausgewählten Betriebspunkt Für den ersten Verifizierungsschritt werden Messdaten eines Einzelrotors an drei Messpunkten erfasst und das gemessene Spektrum mit der Simulation verglichen. BILD 11. Berechneter Schalldruckpegel für einen Einzelrotor im Hochlauf dargestellt an der unteren Messposition Es zeigt sich, dass mit einer Erhöhung der Drehzahl und daher mit einer höheren Blattspitzenmachzahl auch der Schalldruckpegel ansteigt. Leichte Schwankungen sind in der Berechnung erkennbar, welche auf die Diskretisierung zurückzuführen sind. Die größten Unterschiede zwischen Simulation und Messung sind im Bereich kleiner Drehzahlen zu erkennen. Dies ist insbesondere auf Ungenauigkeiten aufgrund der geringen Reynoldszahlen zurückzuführen. In den relevanten Drehzahlbereichen zwischen 4500 rpm und 7000 rpm liegt die BILD 10. Simuliertes (oben) und gemessenes (unten) Übereinstimmung des Schalldruckpegels im Rahmen von Lärmspektrum des Einzelrotors bei 6000 rpm ± 4 dB. ©2020 6
Deutscher Luft- und Raumfahrtkongress 2020 Von besonderem Interesse ist der qualitative Vergleich der experimentellen Daten überein. Die ersten beiden Konfigurationen. So zeigt sich, dass der Quadrocopter die Haupttöne haben eine Genauigkeit von ± 5 dB zur Konfiguration mit dem höchsten Schalldruckpegel ist. Dies Messung. Die Berechnung eines Rotor-Hochlaufs bis zu ist plausibel und war aufgrund der hohen 7000 rpm zeigt auch qualitativ das erwartete Verhalten. Ein Kreisflächenbelastung und der damit verbunden hohen exemplarischer Konzeptvergleich, wie er für den Blattspitzengeschwindigkeit anzunehmen. Sowohl der Vorentwurf von Relevanz ist, wurde zwischen einem Hexacopter, als auch der Octocopter liegen im Quadrocopter, Hexacopter und Octocopter durchgeführt. Gesamtschallpegel unterhalb des Quadrocopters. Bei Varianz der Rotoranzahl blieben die Rotorgeometrien, Besonders interessant ist der Vergleich zwischen Antriebsstränge sowie das Abfluggewicht identisch. Es Hexacopter und Octocopter. Es zeigt sich, dass der konnte gezeigt werden, dass sich für den Octocopter im Octocopter den niedrigsten Schalldruckpegel aufweist, der untersuchten Fall der geringste Schallpegel ergibt, der Unterscheid jedoch lediglich bei 1,1 dB liegt. Dies bedeutet, Schalldruckpegel jedoch lediglich 1,1 dB unter dem dass der Lärmzuwachs durch die höhere Anzahl der Schalldruckpegel des Hexacopters liegt. Derartige Rotoren beim Octocopter, den geringeren Lärm eines Aussagen können in einem frühen Entwicklungsstadium im einzelnen Rotors mit niedrigerer Drehzahl nahezu eVTOL-Vorentwurf zur Konfigurationsauswahl kompensiert. Dieses Ergebnis hat im Rahmen dieser Studie entscheidend beitragen. Es konnte ein Verfahren lediglich exemplarischen Charakter, zeigt jedoch implementiert werden, dass innerhalb der gezeigten hinsichtlich der Lärmemissionen für den Vorentwurf die Genauigkeitsgrenzen plausible Ergebnisse liefert und große Bedeutung der Auswahl einer geeigneten gleichzeitig eine geringe Rechenanforderung aufweist. Konfiguration auf. In Abhängigkeit von der Gewichtung der Dadurch kann die vorgestellte Methodik für erste Akustik kann ein solcher Effekt die Auswahl entscheidend Abschätzungen als Hilfsmittel im Vorentwurf Verwendung beeinflussen. finden. LITERATUR [1] Grandjean, E.; Perret, E.; Lauber, A.: Experimentelle Untersuchungen über die Störwirkung von Flugzeuglärm. In: Internationale Zeitschrift für angewandte Physiologie einschließlich Arbeitsphysiologie, 23, S. 191-202, 1966. [2] Basner, M.; Griefahn, B.; Van den Berg, M.: Aircraft noise effects on sleep: mechanisms, mitigation and research needs. Noise & Health Journal, 12(47), S. 95- 109, 2010. [3] Grandl, G., Ostgathe, M., Cachay, J., Doppler, S., Salib, J., and Ross, H., “The Future of Vertical Mobility, Sizing the market for passenger, inspection, and goods BILD 15. Simulation eines senkrechten Steigflugs mit services until 2035 - A Porsche Consulting study,”, 3 m/s Steiggeschwindigkeit 2018. Neben der Schwebeflugsimulation wird auch ein Steigflug [4] Johnson, W.; Silva, C.; Solis, E.: Concept Vehicles for der drei Konfigurationen simuliert. Der resultierende VTOL Air Taxi Operations. In: AHS Technical Schalldruckpegel über der Zeit ist in BILD 15 dargestellt. Conference on Aeromechanics Design for Dabei haben die Fluggeräte jeweils eine Transformative Vertical Flight, 2018. Steiggeschwindigkeit von 3 m/s. Der Beobachter hat erneut [5] McKay, R. S.; Kingan, M. J.: Multi-rotor unmanned einen Abstand von 1,4 m zum Mittelpunkt des Fluggeräts aerial system noise: Quantifying the motor’s und der Steigflug wird entlang der z-Achse senkrecht contribution. In: 24th Biennial Conference of the ausgeführt. Es zeigt sich auch hier der Unterscheid im Acoustical Society of New Zealand, 2018. Schalldruckpegel zwischen den drei Konfigurationen. [6] Olmstead, J.R.; Fleming, G. G.; Gulding, J. M.; Roof, Weiterhin ist eine deutliche Abnahme des C. J.; Gerbi, P. J.; Rapoza, A. S.: Integrated Noise Schalldruckpegels mit zunehmender Zeit und Model (INM) Version 6.0 Technical Manual, U.S. dementsprechend zunehmender Flughöhe zu erkennen. Department of Transportation Federal Aviation Auch bei variabler Höhe bleibt die relative Differenz des Administration, Report No. FAA-AEE-02-01, 2002. Schalldruckpegels zwischen den drei berechneten [7] Bertsch, E. L.: Noise prediction within conceptual Konfigurationen bestehen. aircraft design, Doktorarbeit, Deutsches Zentrum für Luft- und Raumfahrt; Institut für Aerodynamik und Strömungstechnik Braunschweig, 2013. [8] Williams, J. F.; Hawkings, D. L.: Sound generation by turbulence and surfaces in arbitrary motion. In: 5. ZUSAMMENFASSUNG Proceedings of the Royal Society 264(1151); S. 321- 342, 1969. Es wurde eine Simulationsmethodik zur Vorabberechnung [9] Brentner, K.; Jones, H.: Noise Prediction for des Rotorlärms von Multirotor Fluggeräten im Rahmen des Meneuvering Rotorcraft, In: 6th Aeroacoustics eVTOL Vorentwurfs entwickelt. Die Simulation wurde Conference and Exhibit, 2000. zunächst mit experimentellen Daten eines Rotorprüfstands für einen einzelnen UAV-Rotor abgeglichen. Der tonale Anteil des berechneten Spektrums stimmt gut mit den ©2020 8
Deutscher Luft- und Raumfahrtkongress 2020 [10] Yang, T.: Study of active rotor control for in-plane rotor noise reduction, Doktorarbeit, Pennsylvania State University, 2016. [11] Brooks, T. F.; Pope, D. S.; Marcolini, M. A.: Airfoil Self- Noise and Prediction, NASA-RP-1218, 1989. [12] Shannon, C. E.: Communication in the presence of noise; Proceedings of the IRE 37.1, S. 10-21, 1949. [13] Drela, M.: XFOIL: An Analysis and Design System for Low Reynolds Number Airfoils, In: Low Reynolds number aerodynamics, Springer-Verlag, S. 1-12., 1989. [14] Kraenzler, M.; Dufhaus, D.; Stumpf, E.: Studies on the Influence of Rotor Distance on the Efficiency of a Coaxial Rotor System. In: 44th European Rotorcraft Forum, 2018. [15] Firma flexolan® e.K.: Noppenschaumstoff aus Basotect G+. https://www.schaumstofflager.de/ akustikschaumstoff/basotect/noppenschaumstoff-aus- basotect/noppenschaumstoff-aus-basotect-g-100cm- x-50cm-x-5cm-hellgrau.html (aufgerufen 21. August 2020). ©2020 9
Sie können auch lesen