HELLO, ROBOT Gestaltungsprinzipien für eine nutzungsfreundliche Interaktion zwischen Mensch und Roboter - User Interface Design GmbH
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

HELLO,
ROBOT
Gestaltungsprinzipien
für eine nutzungsfreund-
liche Interaktion zwischen
Mensch und Roboter.
www.uid.com
1 4
ZIEL DER STUDIE STUDIE 3: Überzeuge mich! Wie
Herausforderungen und Chancen der Roboter Menschen motivieren können 14
Mensch-Roboter-Interaktion 03 4.1 Studienaufbau 14
2
4.1.1 Ziel und Fragestellung 14
STUDIE 1: Geste, Sprache oder Display – 4.1.2 Der Roboter 15
Auf der Suche nach der optimalen Interaktion 05 4.1.3 Teilnehmende 16
2.1 Studienaufbau 05 4.1.4 Studienablauf 16
2.1.1 Ziel und Fragestellung 05 4.2 Ergebnisse 17
2.1.2 Der Roboter 05 4.2.1 Einfluss auf Entscheidungen 17
2.1.3 Teilnehmende 06 4.2.2 Gründe für die Entscheidung 18
2.1.4 Studienablauf 06 4.2.3 Das Bedauern des Roboters 18
2.2 Ergebnisse 06 4.2.4 Das Bedanken des Roboters 18
2.2.1 Bevorzugte Interaktion 06 4.2.5 Charakter des Roboters 18
2.2.2 Frustrationstoleranz 07 4.2.6 Wahrnehmung und Auswirkung der Sprache 19
5
2.2.3 Einfluss auf User Experience 07
3
8 GESTALTUNGSPRINZIPIEN
STUDIE 2: Wer bist Du? Wie Roboter sein für die Mensch-Roboter-Interaktion 20
und mit Menschen kommunizieren sollten 08
3.1 Studienaufbau 08
3.1.1 Ziel und Fragestellung 08
3.1.2 Der Roboter 09
3.1.3 Studienablauf 11
3.2 Ergebnisse 12
3.2.1 Bevorzugte Interaktion 12
3.2.2 Feedback über Erfolg/Nichterfolg 12
3.2.3 Verständlichkeit der Pieptöne 12
3.2.4 Bevorzugte Stimmfarbe 13 Fördernummern:
3.2.5 Körpersprache 13 16SV8101 & 16SV7824
2 Hello, robot | User Interface Design GmbH | 2022
1 ZIEL DER STUDIE:
Herausforderungen und Chancen der
Mensch-Roboter-Interaktion
Elena ist 80 Jahre alt. Sie lebt allein in ihrer Wohnung und hat schon
einige Gebrechen: Sie kann weniger gut sehen und hören als früher.
Schmerzen in Rücken und Händen schränken sie motorisch ein. Daher
fallen ihr im Haushalt viele Dinge schwer. Sie kann sich nicht mehr so gut
bücken, um beispielsweise Dinge aufzuheben. Und auch das Tragen von
schweren Gegenständen wie Wäschekörben oder Wasserkisten macht ihr
Probleme. Wie Elena – einer Persona aus unserer Studie – geht es vielen
älteren Menschen. In diesen Lebenssituationen können Assistenzroboter
den Alltag erleichtern, indem sie bei Tätigkeiten im Haushalt zur Hand
gehen. Besonders für körperlich eingeschränkte Personen und Senioren
versprechen sie daher ein selbstbestimmteres Leben, bei dem sie mög-
lichst lang in den eigenen vier Wänden verbleiben können.
Roboter sind ein neuer Bestandteil der Gesellschaft geworden. Vor Jahren
fungierten sie vorwiegend noch als stumme Diener, die vordefinierte
Arbeitsabläufe ausführten. Doch gerade entwickeln sich immer mehr
Service- und Assistenzroboter zu Social Companions. Als solche sollen
sie nicht nur Arbeitsanweisungen befolgen. Je nach Kontext beraten sie
bei auftretenden Problemen, motivieren zu deren Lösung oder beheben
diese direkt selbst.
3 Hello, robot | User Interface Design GmbH | 2022
Um von Laien im Alltag verwendet werden zu können, muss die Inter-
aktion des Roboters mit den Nutzenden verlässlich, schnell und sicher Dabei beantworten wir folgende Fragen:
sein. Nutzende müssen darauf vertrauen können, dass Roboter Befehle
und Aufgaben verstehen und diese ordentlich ausführen. Dies ist ent-
scheidend dafür, ob Roboter vom Menschen akzeptiert werden. Wenn
dies nicht der Fall ist, frustriert das die Nutzenden und belastet sie sogar.
Ziel dieser Studie ist es daher, Gestaltenden und Entwickelnden Tipps an
Wahl der richtigen Interaktion: Sprache, Geste
die Hand zu geben, wie sie die Interaktion zwischen Mensch und Assis- oder Display – welche Interaktion bevorzugen
tenzroboter gestalten können. Denn nur mit einer intuitiven und sicheren Nutzende? (Schwerpunkt Studie 1)
Bedienung können sie Berührungsängste der Nutzenden gegenüber
Robotern abbauen und die Akzeptanz steigern.
Diese Studie basiert auf drei Einzelstudien aus unterschiedlichen Robotik-
Projekten, an denen wir – die User Interface Design GmbH – als Projekt-
partner beteiligt waren. In Kapitel 2 bis 4 stellen wir Aufbau und Ergebnisse Was erwarten Menschen von einem Roboter?
dieser Studien vor. In Kapitel 5 fassen wir die Erkenntnisse aus den drei
Wie stellen sie sich ihn vor? Wie genau sollten
Studien in 8 Gestaltungsprinzipien zusammen. Die Erkenntnisse können
Interaktion, Persönlichkeit und Aussehen
die Gestaltung von Sprache, Stimme, Persönlichkeit und Aussehen von
Service- und Assistenzrobotern verbessern.
gestaltet sein? (Schwerpunkt Studie 2)
Wie können Roboter möglichst motivierend und
überzeugend, also persuasiv, konzipiert werden?
(Schwerpunkt Studie 3)
4 Hello, robot | User Interface Design GmbH | 2022
2 STUDIE 1: 2.1.2 Der Roboter
Die Teilnehmenden mussten über den Forschungshintergrund im Dunkeln
Geste, Sprache oder Display – auf der gelassen werden, damit die Ergebnisse nicht unbewusst verfälscht
Suche nach der optimalen Interaktion wurden. Hierzu war es wichtig, eine Cover Story zu entwickeln. So ent-
stand die Geschichte von Scan-Roboter Paul: Paul sollte im Baumarkt
eingesetzt werden, um bei der Identifikation verschiedener Produkte zu
2.1 STUDIENAUFBAU
helfen. Diese soll er greifen, scannen und ihren Namen ausgeben. Die
Teilnehmenden konnten per Befehl via Sprache, Geste oder Display den
2.1.1 Ziel und Fragestellung Greifarm von Paul öffnen und schließen. Licht, Töne und Sprachsamples
Die Studie „Der kleine Scan-Roboter Paul“ untersuchte, welche Inter- von Paul gaben Feedback, ob der Scan-Vorgang erfolgreich war.
aktionsform Nutzende bevorzugen, um mit Robotern zu interagieren.
Dabei standen folgende Fragen im Mittelpunkt:
Geste, Sprache oder Display – welche Interaktionsform
präferieren Nutzende?
Gibt es eine Interaktionsform, die Nutzende unabhängig vom
Kontext bevorzugen?
Gibt es eine Interaktionsform, der Nutzende mehr Fehler verzeihen,
ohne frustriert zu sein?
Gibt es eine Interaktionsform, die allein durch ihre Einbindung zu
einer besseren UX beiträgt?
Der Scan-Roboter Paul
5 Hello, robot | User Interface Design GmbH | 2022
2.1.3 Teilnehmende 2.2 ERGEBNISSE
2.2.1 Bevorzugte Interaktion
17 42 Jahre 76
Die Auswertung des Fragebogens ergab, dass die meisten Teilnehmenden
das Display als Interaktionsform im Umgang mit Computern bevorzugen.
Im Umgang mit Robotern hingegen stimmten 70 Prozent für Sprache. Für
diese beiden Interaktionsformen hegen die Befragten zudem die größte
57 % 43 % Sympathie. Mit Display und Sprache fühlen sie sich außerdem am vertrau-
testen.
Stichprobe der Teilnehmenden
2.1.4 Studienablauf
Die Teilnehmenden bearbeiteten fünf Aufgaben mit Hilfe des Scan-Robo-
ters Paul. Zu Beginn bekamen sie von uns eine Interaktionsform (Sprache,
Geste oder Display) vorgegeben, mit der sie die Aufgabe lösen sollten. Die
Studie ist eine Wizard-of-Oz-Studie: Da Paul keine Intelligenz besitzt, steu-
erten wir ihn von einem Technikraum aus, der von den Teilnehmenden
abgegrenzt war. Um die Frustrationstoleranz zu testen, mussten wir die
Teilnehmenden „ärgern“. Das heißt: Wir manipulierten einen Teil der Auf- Die Interaktionsform Geste ist sowohl bei der Einschätzung zu Vertraut-
gaben so, dass sich der Greifarm trotz des richtigen Befehls nicht öffnete. heit und Sympathie als auch bei der Nennung als bevorzugte Interaktions-
Die Teilnehmenden mussten auf eine andere Interaktionsform wechseln, form weit abgeschlagen. Die Teilnehmenden begründeten dies damit,
um den Prozess fortzuführen und die Aufgaben zu beenden. Im Anschluss dass sie erst „gelernt“ werden müsste, da sie oftmals nicht so „intuitiv“
interviewten wir die Teilnehmenden, um die Aufgaben zu besprechen und war wie erhofft.
allgemeine Fragen zu klären. So wollten wir beispielsweise wissen, welche
Interaktionsform sie mit Computern sowie Robotern bevorzugen und wie
viel Sympathie und Vertrautheit sie für diese empfinden.
6 Hello, robot | User Interface Design GmbH | 2022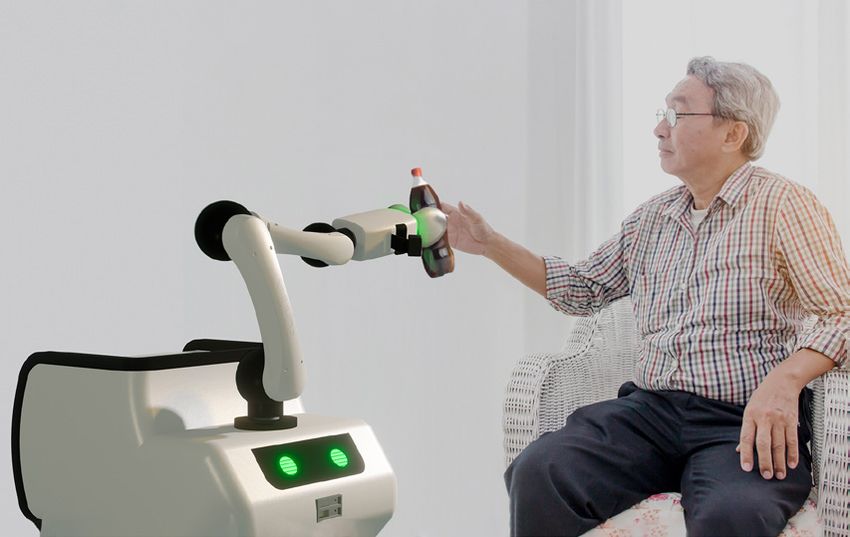
2.2.2 Frustrationstoleranz 2.2.3 Einfluss auf User Experience
Die wenigste Geduld hatten die Teilnehmenden mit der Displaysteuerung. Gibt es eine Interaktionsform, die allein durch ihre Einbindung zu einer
Diese Interaktionsform war für sie die bekannteste. Daher hatten sie besseren UX beiträgt? Um diese Frage zu beantworten, ermittelten wir
wenig Verständnis, wenn diese nicht funktionierte. Nachdem im mit Hilfe des Fragebogens AttrakDiff die User Experience (UX) der Inter-
Schnitt 3,94 Interaktionsversuche mit der Steuerung via Display erfolglos aktionsformen. Wir untersuchten, ob und wie stark die auftretenden
waren, wechselten die Teilnehmenden die Interaktionsform. Im Kontext Fehler die UX beeinflussen. Das Ergebnis: Alle Interaktionsformen wirkten
der Sprachsteuerung wechselten sie nach 4,55 Versuchen. Am toleran- sich ähnlich auf die User Experience aus. Auch litt die UX während der
testen waren die Teilnehmenden mit durchschnittlich 5 Versuchen gegen- manipulierten Aufgaben bei allen drei Interaktionsformen gleichermaßen.
über der Gestensteuerung. Eine bestimmte Interaktionsform, die Nutzende bevorzugten und deren
Einbindung die UX steigert, gab es also nicht.
Frustrationstoleranz der Teilnehmenden bei verschiedenen Interaktionsformen
7 Hello, robot | User Interface Design GmbH | 2022
3 STUDIE 2:
Wer bist Du? Wie Roboter sein und mit
Menschen kommunizieren sollten
3.1 STUDIENAUFBAU
3.1.1 Ziel und Fragestellung
Im Forschungsprojekt SINA entstand ein Roboter, der Gegenstände
greifen und an Menschen übergeben kann. Damit dies sicher und intuitiv
gelingt, braucht es eine klare und eindeutige Kommunikation zwischen
Mensch und Roboter. Hierzu entwickelten wir unterschiedliche Arten der
auditiven Interaktion – von der menschlichen Stimme über eine Roboter-
Stimme bis zu Roboter-Pieptönen à la R2-D2. Das Sound- und Sprach-
Interface wird zusätzlich unterstützt, indem der Roboter auch durch
Körperbewegungen und Licht kommuniziert. Die verschiedenen Varianten
testeten wir in einer Studie mit Nutzenden. Dabei fokussierten wir uns auf
folgende Fragen:
Wie empfinden die Teilnehmenden die verschiedenen Stimmfarben?
Welche ist die passendste und angenehmste?
Können die Teilnehmenden die Pieptöne eindeutig interpretieren?
Welche Art der Körpersprache kommt am besten an?
8 Hello, robot | User Interface Design GmbH | 2022
3.1.2 Der Roboter
Der Roboter SINA besteht aus einem Greifarm, mit dem er Gegenstände
aufheben oder entgegennehmen kann. Es gibt zudem eine Fläche, auf
der Gegenstände wie ein Wäschekorb oder eine Wasserkiste abgestellt
werden können.
Der Roboter kommunizierte im Test via Sound (Pieptöne) oder Sprache
mit den Nutzenden. Um das gesamte Spektrum an Sprechweisen zu
untersuchen, entwickelten wir fünf Sprach- und Soundsamples:
Pieptöne Robo-Stimme menschliche Stimme
sehr technisch sehr menschlich
Stimmspektrum
Rendering Roboter SINA
9 Hello, robot | User Interface Design GmbH | 2022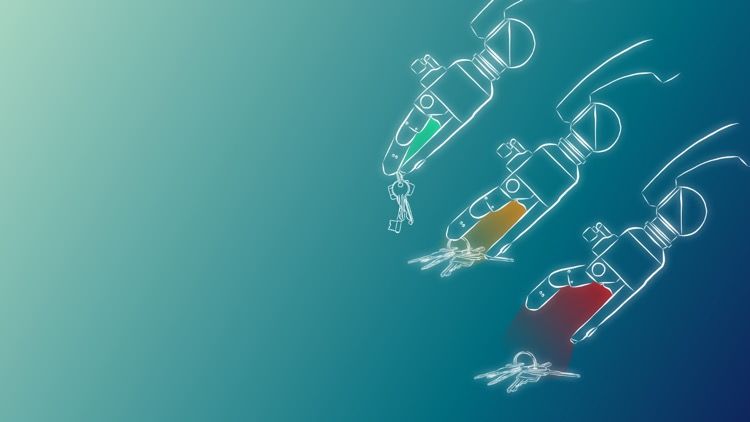
Wir erstellten fünf Pieptöne, die Folgendes ausdrücken sollten:
Ja! Du bist dran.
Zustimmung. Aufforderung: „Hier, Du kannst
„Ich habe Dich gehört.“ den Gegenstand jetzt nehmen.“
„Ich bin wach.“
Ist das so ok?
Nachfragen. Warten auf neuen Befehl.
Nein. Ich habe Dich
„Das kann ich leider nicht verstanden.
nicht tun.“
Sag das bitte noch mal.
Lichtfeedback und Körpersprache unterstützen die Interaktion. Beispiels-
weise „nickt“ der Arm des Roboters, um visuell zu bestätigen, dass er
einen Gegenstand aufheben kann.
17 42 Jahre 76
57 % 43 %
10 Hello, robot | User Interface Design GmbH | 20223.1.3 Studienablauf
Aufgrund von Covid-19 konnten wir die Studie nicht vor Ort durchführen.
Die Nutzenden konnten somit nicht direkt mit dem Roboter interagieren,
vielmehr wurden sie remote per Video durchgeführt. Dabei gab es vier
Aufgaben:
1 2 3 4
VISUALISIERUNGS- SOUND KÖRPERSPRACHE DES VIDEOPRÄFERENZ:
AUFGABE CHARAKTERISIERUNG ROBOTERS BEWEGUNG & BILD
Kein Stimulus-Material, Teilnehmen- Teilnehmende hören die Sprach- Teilnehmende sehen zwei Videos Teilnehmende sehen zwei Videos
de kennen und sehen den Roboter und Sound-Samples ohne Text: mit Ton:
AUFGABEN
nicht 1. Menschliche Körperbe- 1. Zusammenspiel aus menschlicher
wegungen wie „Nicken“ und Stimme und menschlicher
Lichtfeedback mit verschiedenen Bewegung
Animationen und Farben 2. Interaktion aus Pieptönen,
2. Reduzierte Körperbewe- Roboter-Stimme und reduzierter
gungen (nur Greifvorgänge) und Körperbewegung
Lichtfeedback mit verschiedenen
Farben, aber ohne Animationen
FRAGESTELLUNGEN
Was erwarten Teinehmer Für Pieptöne: Können die Teilneh- Welche non-verbale Kommu- Wie empfinden Teilnehmende
a priori von einem Roboter? menden die Pieptöne eindeutig nikation empfinden die das Zusammenspiel zwischen
(Erwartungen hinsichtlich Interaktion, interpretieren? Für alle Sprach- und Teilnehmenden als ange- Bewegung, Sprache und Lichtfeed-
Feedbackarten, Wissen und Fähig- Sound-Samples – Wie empfinden nehmer? back im Szenario?
keiten des Roboters) und charakterisieren die Teilnehmen-
den die verschiedenen Klangfarben
der Samples? Welche passt für sie
am besten?
11 Hello, robot | User Interface Design GmbH | 20223.2 ERGEBNISSE
1. Der Sound wurde von den Teilnehmenden
3.2.1 Bevorzugte Interaktion
genauso dekodiert wie es vom Sound-
100 % der Teilnehmenden erwarteten, mit dem Assistenzroboter über designer intendiert war.
natürlich gesprochene Sprache zu interagieren. Eine Gesteninteraktion er-
2. Der Sound wurde vom Teilnehmenden anders
wartete keiner der Teilnehmenden. Auch auf Nachfrage konnten sich nur
(aber trotzdem schlüssig) interpretiert, als es
wenige Teilnehmende vorstellen, über ein Gesteninterface zu interagieren.
vom Sounddesigner intendiert war.
3.2.2 Feedback über Erfolg / Nichterfolg 3. Der Sound wurde von den Teilnehmenden
diametral anders interpretiert, als es vom
Wenn der Roboter es nicht schaffte, einen Gegenstand zu greifen, Sounddesigner intendiert war.
erwarteten 100 % eine entsprechende Rückmeldung vom Roboter. War
die Interaktion hingegen positiv verlaufen, erwarteten nur die Hälfte der
Teilnehmenden Feedback. Interpretation der semantischen Bedeutung
3.2.3 Verständlichkeit der Pieptöne
Sounds können die Diversität der Sprache nur schlecht wiedergegeben.
Es gab sehr große Unterschiede darin, ob Teilnehmende die Piep-Töne Dennoch konnten die Teilnehmenden die Bedeutung überraschend gut in-
eindeutig „verstehen“ konnten oder nicht. Einige konnten die Bedeutung terpretieren. Pieptöne können – an geeigneten Stellen – für Menschen mit
der Sounds sehr gut und intuitiv erfassen. Andere taten sich schwer, die einer hohen Auffassungsgabe eine Alternative sein, da mit ihnen schneller
richtige Bedeutung zu erkennen. Feedback gegeben werden kann als mit langen gesprochenen Sätzen.
12 Hello, robot | User Interface Design GmbH | 2022ALS ÄLTERER DA SINA NUR EIN
MENSCH... ARM IST...
würde ich mir eine hätte ich keine
menschliche menschliche
Stimme wünschen. Stimme erwartet.
Präferenz der Stimmen Unterschiedliche Stimm-Präferenz je nach Fokus
3.2.4 Bevorzugte Stimmfarbe 3.2.5 Körpersprache
Im Allgemeinen bevorzugten die Teilnehmenden die menschliche gegen- 62 % der Teilnehmenden empfanden die menschlich-anmutende Körper-
über der roboterartigen Stimme. Welche Stimme die Teilnehmenden bewegung als angenehmer. Sie verbanden damit ein positives Nutzungs-
präferierten, hing sehr stark vom jeweiligen Fokus ab. Mit Blick auf das erlebnis durch Emotionen wie Freude, Überraschung, aber auch Belusti-
Aussehen des Roboters bevorzugten die Teilnehmenden die künstlichen gung. Nur 25 % präferierten die reduzierte Körpersprache, da diese nicht
Stimmen, da sie besser zum Produktdesign passten. Lag der Fokus der so lange dauerte und zielgerichteter war.
Teilnehmenden auf den Nutzenden und ihren Bedürfnissen, präferierten
sie die menschliche Stimme.
13 Hello, robot | User Interface Design GmbH | 20224 STUDIE 3: Dafür wählten wir das Ausräumen der Spülmaschine in einem Unterneh-
men als Anwendungsbeispiel. Diese Aufgabe stellt oft ein Problem dar:
Überzeuge mich! Wie Roboter Es gibt keinen klaren Verantwortlichen für diese meist unliebsame Auf-
Menschen motivieren können gabe, vielmehr hofft man auf das solidarische Handeln Vieler. Ein nach
persuasiven Prinzipien konzipierter Roboter sollte Mitarbeitende moti-
vieren, die Spülmaschine auszuräumen. Um dies zu messen, zählten
4.1 STUDIENAUFBAU wir die Entscheidungen, die Spülmaschine nicht auszuräumen. Wichtig:
Wir zählten bewusst Entscheidungen und keine Personen, weil Personen
mehrmals am Tag die Küche betreten und sich jeweils unterschiedlich
4.1.1 Ziel und Fragestellung entscheiden konnten.
Mit dem technologischen Fortschritt entwickeln sich die Fähigkeiten der
Roboter immer weiter, sodass einige bereits autonom, also ohne mensch-
Exkurs: Persuasive Prinzipien
liche Unterstützung, Aufgaben erledigen können. Dennoch kann es immer
(visuell als Exkurs gestaltet)
wieder zu Situationen kommen, in denen Roboter Hilfe vom Menschen
benötigen. Dabei ist es elementar, dass Roboter ihre Anfragen überzeu- Das Forschungsgebiet Captology untersucht, wie Computer Menschen
gend und motivierend kommunizieren. Sie können ihre Aufträge nur dann bei Meinungs- und Verhaltensänderungen unterstützen können. Verschie-
erfolgreich ausführen, wenn sie persuasiv um Hilfe bitten können. Unsere dene Autoren beschreiben über 40 persuasive Strategien, mit denen Com-
Studie geht daher der Frage nach, ob und wie Roboter Menschen über- puter persuasiv auf Menschen wirken können. Unsere Studie untersucht,
zeugen und motivieren können, zu helfen. ob sich diese auch auf die Mensch-Roboter-Interaktion übertragen lassen.
Für unsere Studie wählten wir folgende zehn Prinzipien aus.
14 Hello, robot | User Interface Design GmbH | 2022PERSUASIVES 4.1.2 Der Roboter
ERKLÄRUNG
PRINZIP
Neue und unerwartete Aktionen machen eine
Surprise
Anwendung spannend.
Loss Aversion Man hasst es, Dinge zu verpassen oder zu verlieren.
Reciprocity Man möchte einen Gefallen erwidern.
Humor lockert auf und nimmt unnötigen Ernst aus
Humor
Angelegenheiten.
Praise Lob hat positive Auswirkungen auf das Verhalten.
Mit Erinnerung ist man gewillter, das Zielverhalten
Reminder
zu erreichen.
Suggestion Ein Vorschlag zur richtigen Zeit überzeugt.
Roboter SKIWO
Erlebnisse mit hohen, positiven Intensitätsausschlägen
Peak-End-Rule
und einem stark positiven Ende werden besser bewertet. Bei der Studie mit Nutzenden setzten wir unseren eigens entwickelten
Prototypen SKIWO ein. Den Roboter gestalteten wir nach persuasiven
Competition Ein Wettkampf zwischen Personen spornt an. Prinzipien: Sein kindliches, niedliches Aussehen soll ein Fürsorgeverhalten
hervorrufen. Deshalb ist SKIWO auch nur 30 cm groß. Proportional zum
Normative Was andere denken und tun, beeinflusst die
Rest des Körpers sind Kopf und Augen von SKIWO übergroß und entspre-
Influence Überzeugung.
chen somit dem Kindchenschema.
Mit reduziertem Aufwand steigt die Der Roboter kann „sprechen“, indem er Sprachsamples über einen im Kör-
Reduction
Überzeugungskraft. per installierten Lautsprecher ausgibt. Antworten von Menschen kann er
jedoch nicht verstehen und nicht darauf reagieren. Passend zum Gesag-
Überblick und Erklärung der ausgewählten persuasiven Prinzipien ten, geben die Augen unterschiedliche Zustände und Emotionen wieder.
15 Hello, robot | User Interface Design GmbH | 20224.1.3 Teilnehmende
20 32,5 Jahre 51
70 % 30 %
Zustände der Augen von schlafend bis traurig Stichprobe der Teilnehmenden
4.1.4 Studienablauf
Die Sprachsamples wurden eingesprochen, technisch verzerrt und erhöht,
damit sie besser zum kindlichen Charakter passen. In einer ersten initialen Phase beobachtete das Projektteam das bisherige
Ausräumverhalten der Mitarbeitenden über zwei Wochen und ermittelte
Inhaltlich basieren die Sprachsamples auf den zehn ausgewählten per- dadurch den Ist-Zustand. In der zweiten Phase setzten wir den Roboter
suasiven Prinzipien. Hier zwei Beispiele: SKIWO zwei Wochen in der Küche ein. In diesem Wizard-of-Oz-Experiment
steuerte ein Mitarbeiter ihn aus der Ferne. In der Küche befand SKIWO
Praise: Lob wirkt sich positiv auf das Verhalten aus. Deswegen lobte sich normalerweise im Schlafzustand. Erst wenn die Spülmaschine aus-
und ehrte SKIWO die Mitarbeitenden und bedankte sich für ihre Hilfe. geräumt werden musste, erwachte er. Betraten Mitarbeitende die Küche,
Beispiel: „Auf Deine Hilfe kann ich doch immer zählen! Könntest Du mir sprach SKIWO sie mit den oben genannten Sprachsamples an und bat
einen kleinen Gefallen tun und vielleicht die Spülmaschine ausräumen?“ sie, die Spülmaschine auszuräumen. Gingen die Mitarbeitenden seiner
Reduction: Mit reduziertem Aufwand steigt die Überzeugungskraft. Bitte nach, lobte SKIWO sie. Entschieden sie sich, nicht zu helfen, bedau-
Deswegen ermutigte SKIWO, dass bereits das Ausräumen eines einzel- erte SKIWO dies und war traurig.
nen Geschirrelements eine Hilfe sei.
Beispiel: „Ich weiß, Du hast wenig Zeit. Schaffst Du es vielleicht
trotzdem, einen Teller auszuräumen?“
16 Hello, robot | User Interface Design GmbH | 2022Abschließend befragten wir die Mitarbeitenden zu ihren Erfahrungen mit
SKIWO. Sie beantworteten einen Godspeed Questionnaire, der die Wahr-
nehmung der Interaktion mit einer 5-Punkte-Skala misst. Danach stellte
der Interviewende offene Fragen, insbesondere zur Wahrnehmung der
Sprache des Roboters.
4.2 ERGEBNISSE
4.2.1 Einfluss auf Entscheidungen
Durch den Einsatz von SKIWO räumten die Mitarbeitenden die Spülma-
schine signifikant häufiger aus.
Entscheidung, die Spülmaschine nicht auszuräumen
Phase Anzahl Gesamt M Mdn
Spülgänge
Ohne Roboter 22 219 10.0 7
Mit Roboter 19 65 3.4 2
Vergleich der Phasen im Hinblick auf die Entscheidungen, die Spülmaschine nicht
auszuräumen
Ohne motivierenden Roboter trafen die Mitarbeitenden im Schnitt pro
Spülgang dreimal häufiger die Entscheidung, das Geschirr nicht auszu-
räumen. SKIWO hatte also einen deutlichen Effekt auf das Verhalten der
Mitarbeitenden.
SKIWO im Einsatz
17 Hello, robot | User Interface Design GmbH | 20224.2.2 Gründe für die Entscheidung 4.2.4 Das Bedanken des Roboters
SKIWO machte die Mitarbeitenden neugierig (8 von 20): Die Befragten Alle befragten Personen fanden es gut, dass sich der Roboter bedankt
wollten wissen, was passiert und wie der Roboter reagiert. Durch das hat. Auf die Frage, ob es für sie einen Unterschied mache, ob der Dank
angewendete Prinzip „Surprise“ wurde genau dem nachgegangen, dass von einem Menschen oder einem Roboter kam, waren die Antworten
der Nutzende sich immer wieder von neuen Sprachsamples überraschen ambivalent. Der eine Teil der Befragten sah hier keinen Unterschied,
lassen wollte. während der andere Teil die Meinung vertrat, dass Dankbarkeit von einem
Menschen authentischer ist als von einem Roboter, der nur einem vorge-
Einige Personen (5 von 20) fühlten sich „ertappt“ oder hätten ein „schlech- fertigten Skript folgt.
tes Gewissen“ gehabt (5), wenn sie die Bitte ignoriert hätten. Fünf Per-
sonen gaben an, dass sie sich durch den Roboter freundlich motiviert
4.2.5 Charakter des Roboters
fühlten. Ein Grund, warum nicht ausgeräumt wurde, war, dass schon vor
kurzem geholfen wurde und nun andere Personen an der Reihe wären Alle Befragten nahmen den Charakter des Roboters als positiv wahr. Die
(4 von 20). Mitarbeitenden charakterisierten ihn als freundlich (8 von 20), höflich (5
von 20), nett oder sympathisch (5 von 20). Zwei Befragte beschrieben ihn
explizit als motivierend und hilfsbereit oder „kleinen Helfer“.
4.2.3 Das Bedauern des Roboters
Das Bedauern des Roboters nach der Entscheidung, das Geschirr nicht
auszuräumen, verursachte, dass Personen ein schlechtes Gewissen be-
kamen und über ihre Entscheidung nachdachten (5 von 20). Eine Person
vermied beim nächsten Mal absichtlich die traurige Reaktion des Robo-
ters, indem sie ein Geschirrelement ausräumte. Drei Personen kehrten
sogar nach dem Bedauern des Roboters um, um die Spülmaschine doch
auszuräumen.
18 Hello, robot | User Interface Design GmbH | 20224.2.6 Wahrnehmung und Auswirkung der Sprache
Grund für diese positive Wahrnehmung SKIWOs waren laut der Befragten
die Sprache und das Aussehen. Die Befragten fanden SKIWO nicht nur
wegen des Inhalts des Gesagten, sondern auch aufgrund der Art und
Weise (Tonfall, Art der Formulierung) sympathisch. Die Formulierungen
wurden als bestimmt, aber nicht als befehlend wahrgenommen. Trotz
ständigen Bittens nahmen ihn die Mitarbeitenden immer als höflich und
freundlich wahr.
Kein Wunder: Bei der Erstellung der Sprachsamples achteten wir bewusst
darauf, keine unhöfliche, respektlose oder negative Sprache zu verwen-
den. Im Gegenteil: Dem Prinzip „Praise“ folgend wurden die Personen
gelobt, wertgeschätzt und ihnen wurde höflich und freundlich begegnet.
Die Mitarbeitenden vermissten die Möglichkeit, dem Roboter antworten
zu können. Zum Beispiel um zu erklären, warum sie gerade nicht helfen
konnten.
Zusammenfassend zeigte sich, dass ein Roboter Menschen motivieren
kann, zu helfen. Dabei wirkt sich die Sprache des Roboters in hohem
Maß auf dessen Persuasion aus. Wichtig ist hierbei nicht nur der Inhalt,
sondern auch die Art und Weise der Kommunikation und die verwendeten
Formulierungen. Deshalb sollten Gestalter sie gezielt und verantwortungs-
voll konzipieren.
19 Hello, robot | User Interface Design GmbH | 20225 8 GESTALTUNGSPRINZIPIEN Die Ergebnisse der Einzelstudien bündeln wir in 8 Gestaltungsprinzipien,
die Euch dabei helfen sollen, eine optimale Mensch-Roboter-Interaktion
für die Mensch-Roboter-Interaktion zu gestalten.
1 Sprache ist die natürlichste und 4 Multimodalität sorgt für mehr 7 Ein positives Nutzungserlebnis
intuitivste Art, um mit Robotern Klarheit. und emotionales Design erhöhen
zu interagieren. die Akzeptanz von Robotern.
2 Was und wie ein Roboter spricht, 5 Eine menschlich anmutende 8 Nutzende und der jeweilige
wirkt sich auf die Wahrnehmung Körpersprache trägt zu einem Nutzungskontext müssen im
und Persuasion aus. optimalen Nutzungserlebnis bei. Mittelpunkt stehen.
3 Die Sprach- und Soundinter- 6 Roboter sollten sich hierarchisch
aktion sollte klar und eindeutig unterordnen.
verständlich sein.
20 Hello, robot | User Interface Design GmbH | 20221 2
Sprache ist die natürlichste und intuitivste Was und wie ein Roboter spricht, wirkt sich
Art, mit Robotern zu interagieren. auf die Wahrnehmung und Persuasion aus.
Alle drei Studien zeigen: Die Nutzenden möchten mit Robotern sprechen. Wichtig ist nicht nur, was ein Roboter sagt. Auch die Art und Weise, wie er
Sie bevorzugen die Sprache deutlich vor anderen Interaktionsformen wie spricht, beeinflusst die (persuasive) Wirkung des Roboters. Ein höflicher
der Gestensteuerung. Besonders für die Zielgruppe der Senioren und ein- Roboter ist persuasiver: Eine respektvolle, höfliche und freundliche Spra-
geschränkten Personen eignet sich ein gut gestaltetes Sprach-Interface. che erhöht die Akzeptanz seitens der Nutzenden. So können Tonfall und
Denn diese Art von Interface setzt kein Zusatzwissen voraus. Die Sprach- Formulierungen dazu beitragen, dass sie den Roboter positiv wahrneh-
interaktion bietet sich beispielsweise auch an, wenn der Roboter sich in men. Die sprachlichen Formulierungen von Voice User Interfaces sollten
einem anderen Raum befindet und der Nutzende ihn erst zu sich rufen daher sehr gezielt und sensibel konzipiert werden. Dabei sollte man fol-
muss und keine Steuerung parat hat. gende UX-Prinzipien einhalten: Während bei visuellen User Interfaces die
Sprache als Interaktionsform zu verwenden, führt jedoch nicht zwingend Verwendung von gleichen Patterns zu mehr Konsistenz beiträgt, sollten
zu einem besseren Nutzungserlebnis (User Experience). Die Nutzenden Voice User Interfaces möglichst abwechslungsreich gestaltet sein, damit
verzeihen dieser Interaktionsform nicht mehr Fehler als anderen Interak- sie nicht monoton wirken. Aussagen sollten kurz und prägnant formuliert
tionsarten. werden. Anfang und Ende einer Interaktion sollten klar signalisiert werden
und dem Nutzenden sollte jederzeit Feedback über den aktuellen Zustand
des Roboters gegeben werden.
21 Hello, robot | User Interface Design GmbH | 20223 4
Die Sprach- und Soundinteraktion sollte klar Multimodalität sorgt für mehr Klarheit.
und eindeutig verständlich sein.
Ob Lichtinteraktion, Projektionen oder Körpersprache – andere Kommuni-
Die Sprach- und Soundinteraktion muss klar und deutlich verständlich kationsmodalitäten können Nutzende dabei unterstützen, die Intentionen
sein – sowohl inhaltlich als auch technisch. Bei letzterem spielt auch die und Aussagen des Roboters richtig zu deuten.
Aufnahme- und Lautsprecherqualität eine große Rolle. Lichtfeedback beispielsweise ist eine schnelle und wenig aufdringliche
Insbesondere bei älteren Menschen empfehlen wir Sprachsamples und Möglichkeit, um Nutzenden Feedback über den Systemzustand eines
keine Soundsamples, da sie intuitiver verwendet werden können. Gerade Roboters zu geben. Es gibt eine Reihe von Zuständen, die der Roboter
in Situationen, in denen keine Zeit für Fehler oder zum Erlernen von Tönen im Zuge einer positiven User Experience visualisieren sollte, um Un-
gegeben ist, spielen sie ihre Stärke aus. sicherheiten über den Zustand und die Absichten des Roboters beim
Nutzenden zu reduzieren.
Für jüngere Zielgruppen können Soundsamples wie Pieptöne jedoch
durchaus interessant sein: Pieptöne sind schneller als gesprochene
Sprache. Einmal erlernt, können sie sogar präziser sein. Insbesondere ANFORDERUNGEN
jüngere Zielgruppen, zum Beispiel aus der Generation Y und Z, sind meist 3 c = Grünes Licht
ungeduldig und warten nicht, bis ein Sprachinterface fertig gesprochen SINA hat den Gegenstand sicher
gegriffen
hat. Pieptöne lassen sich beispielsweise gut in zwanglosen oder kreativ-
innovativen Situationen einsetzen, in denen Fehler nicht kritisch sind und/ 3 d = Orangenes Licht
SINA hat den Gegenstand dreimal
oder die Nutzenden Zeit haben, die Sound-Bedeutungen zu erlernen. In erfolglos versucht zu greifen
einer Einlern-Phase könnten beispielsweise Sprache und Töne parallel
3 e = Rotes Licht
eingesetzt werden. Nach und nach kann der Einsatz von Sprache redu- SINA kann den Gegenstand
ziert werden, wenn die Nutzenden die Bedeutung der Töne erlernt haben. auch nach dem fünften
Versuch nicht greifen
Lichtfeedback am Beispiel des SINA-Roboters (Studie 3)
22 Hello, robot | User Interface Design GmbH | 20225 6
Eine menschlich anmutende Körpersprache Der Roboter sollte sich hierarchisch
trägt zu einem optimalen Nutzungserlebnis unterordnen.
bei. Für die Interaktion zwischen Mensch und Roboter ist nicht nur die Kom-
Für ein optimales Nutzungserlebnis sollte die Kommunikation von munikation, sondern auch das Produktdesign und die Persönlichkeit des
menschlich anmutenden Bewegungen wie Kopfnicken oder ein fragendes Roboters von Bedeutung. Sie beeinflussen erheblich, welche Fähigkeiten
Schräglegen des Kopfs begleitet werden. Denn die Körpersprache eines Nutzende von einem Roboter erwarten.
Roboters beeinflusst in großem Maße dessen Wahrnehmung: Sie vermit- Die Ergebnisse aus Studie 2 und 3 zeigen, dass die Nutzenden sich Assis-
telt Vertrauen, Empathie, Sicherheit und Verlässlichkeit. Für das Kohärenz- tenzroboter als „süß“ vorstellen bzw. wünschen. Das wirkt sich auf Größe
erleben der Nutzenden müssen Kommunikation und Körpersprache des und Produktdesign aus:
Roboters zeitlich präzise auf die Spracheingabe der Nutzenden abge-
stimmt sein. Bewegungen sollten daher nicht irregulär, ruckelig, wackelig
Größe + Aussehen
oder abrupt ablaufen. Sie sollten möglichst gemäßigt, reibungslos, sanft
und den menschlichen Dynamiken von Be- und Entschleunigung folgen. Die Nutzenden erwarten einen Roboter von 1 bis 1,5 m Größe. Damit
Nur wenn die Interaktion zeitlich flüssig und reibungslos abläuft, nehmen wäre er kleiner als ein Erwachsener. Der Mensch könnte auf ihn herab-
Nutzende den Roboter als kompetent und sympathisch wahr. schauen. Das gibt ihm ein höheres Gefühl der Kontrolle.
Angenehmes, freundliches Aussehen
Der Roboter sollte funktional, aber dennoch niedlich sein.
Er sollte hell, freundlich und warm anmuten.
23 Hello, robot | User Interface Design GmbH | 20227
Ein positives Nutzungserlebnis und
emotionales Design erhöhen die Akzeptanz
von Robotern.
Emotionen können auf unterschiedliche Weise transportiert werden:
Augen können an die Situation angepasste und auf den Kommunika-
tionsinhalt abgestimmte Emotionen zeigen.
Der Roboter als Buddy
Zusätzlich zum Sprach-Interface können Basisemotionen wie Freude
Fordern die Nutzenden auch soziale und Unterhaltungsaspekte, sehen oder Überraschung durch Sounds transportiert werden.
manche in dem Assistenzroboter einen „kleinen Buddy“. Die Körpersprache kann emotionale Zustände verdeutlichen. Zum
Beispiel zeigt ein Hängenlassen des Kopfes an, dass der Roboter
In diesen verschiedenen Punkten zeigen sich nicht zuletzt die psychologi- traurig ist.
schen Bedürfnisse der Nutzende nach Sicherheit und Kontrolle über den
Roboter. Der Roboter soll sich dem Menschen hierarchisch unterordnen Die emotionale Äußerung von Robotern wird mit Hinsicht auf soziale und
– und das auch optisch. Die Erwartung an die Größe und die Assoziation ethische Aspekte aber auch kritisch diskutiert. Kritiker befürchten, dass
„süß“ unterstreicht dieses Machtasymmetrie. Roboter Menschen emotional von sich abhängig machen können.
24 Hello, robot | User Interface Design GmbH | 2022Exkurs: Tool-Tipp 8
Um ethische und soziale Aspekte in Roboter-Projekten systematisch zu
erheben und im Blick zu behalten, könnt Ihr Tools wie EVA (Ethical Value Nutzende und der jeweilige Nutzungs-
Assessment) nutzen. Mit dem Tool unterzieht Ihr Euer Projekt einem kontext müssen im Mittelpunkt stehen.
Ethikstress-Test, der ethische Angriffsflächen aufdeckt. Dafür bewertet Ihr
verschiedene Designvarianten in unterschiedlichen, frei wählbaren Dimen- Diese Gestaltungsprinzipien basieren auf den Erkenntnissen aus unseren
sionen wie Datenschutz, Sicherheit und Profitabilität. In jeder Dimension Projekten. Abhängig von Nutzungskontext und Zielgruppe, können Nut-
gebt Ihr an, welche Chancen und Risiken mit den jeweiligen Varianten für zende jedoch ganz andere Anforderungen an Roboter-Design und Interak-
Eure Stakeholder einhergehen. Ein Dashboard visualisiert die unterschied- tion stellen. Im Sinne des menschzentrierten Gestaltungsprozesses sollte
lichen Varianten anschaulich und übersichtlich. Ihr könnt mögliche Risiken daher immer der Nutzende in den Fokus der Entwicklung gerückt und die
schnell erkennen und Maßnahmen ergreifen, um diese zu reduzieren. Interaktionsform an die jeweiligen Bedürfnisse und den Nutzungskontext
angepasst werden. Nur so können Gestaltende sicherstellen, dass die
https://evatool.org/ Nutzenden den Roboter akzeptieren und von seiner Assistenz profitieren.
25 Hello, robot | User Interface Design GmbH | 2022Ludwigsburg
Berlin
Dortmund
Mannheim
DIE AUTOREN München
STEPHANIE HÄUSLER-WEISS KILIAN RÖHM JULIANE MARKOTSCHI
Senior User Experience Designer User Experience Consultant Lead Corporate Communications
IHR WOLLT MEHR ERFAHREN?
Wenn Ihr Fragen oder Anmerkungen habt,
wendet Euch gern jederzeit an uns:
info@uid.com
www.uid.comSie können auch lesen