HYDROGRAPHISCHE NACHRICHTEN - Fokusthema: KI in der Hydrographie - Journal of Applied Hydrography
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
HYDROGRAPHISCHE
NACHRICHTEN
Journal of Applied Hydrography 06/2021 HN 119
Fokusthema:
KI in der Hydrographie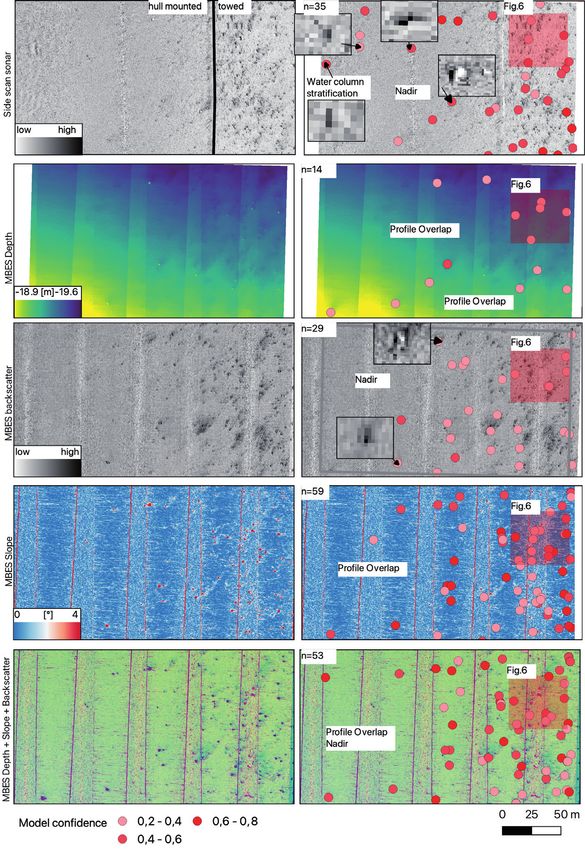
Ocean engineering
Consulting
from space into depth
Realise your projects in cooperation with our hydrographic services
Our hydrography engineers are happy to develop
systems tailored exactly to your needs and to
provide professional advice and support for
setting up your systems and training your staff.
MacArtney Germany benefits from being part of
the MacArtney Group and enjoys unlimited access
to cutting-edge engineering competences and
CTDs & SVPs advanced facilities.
Acoustic
sensors
Software
Position and
motion sensors
Integration
Denmark Norway Sweden United Kingdom France Italy Netherlands Germany
USA Canada South America Australia Singapore China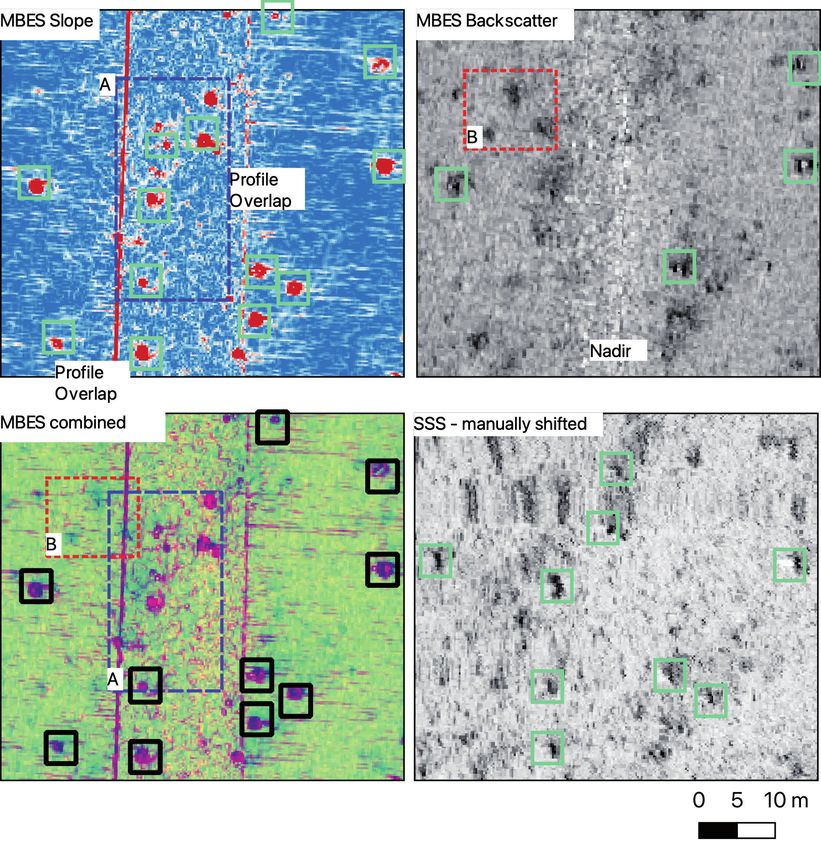
Vorwort
Liebe Leserinnen und Leser,
wir alle nutzen künstliche Intelligenz. Beinahe täg- thischen Arten mittels Deep Learning« (Lütjens
lich. Meist ohne es zu merken. Wenn wir uns von und Sternberg, Seite 18); es geht um den Mangel
Suchmaschinen durchs Web lotsen lassen, wenn an echten Trainingsdaten und um den Versuch,
wir online shoppen. Oder wenn wir für die Suche die künstliche Intelligenz mit synthetischen Bil-
nach dem rechten Weg Navigationssystemen ver- dern zu trainieren (Steiniger et al., Seite 30); und
trauen. es geht um Softwarelösungen, die dank maschi-
In Navigationssystemen steckt künstliche Intel- nellem Lernen neue autonome Anwendungen in
ligenz übrigens gleich dreifach drin. Da wird der der Hydrographie ermöglichen (McPherson Kimø,
kürzeste Weg ermittelt. Da gibt es eine Sprachaus- Seite 36).
gabe. Und da werden aktuelle Verkehrsinformatio- Auffallend ist, dass es bei den KI-Anwendungen
nen mit in die Routenplanung einbezogen. vor allem um das Erkennen von Mustern geht. Und
Ist das nun künstliche Intelligenz? Ja, auch. Aber dass künstliche Intelligenz gar nicht von sich aus
Lars Schiller
eben nicht nur das. Der Begriff lässt sich bislang intelligent ist, sondern erst von Menschen trainiert
nicht wirklich klar definieren. Es geht irgendwie werden muss. Von Science-Fiction keine Spur.
um Informatik, um abgefahrene Technologien Aber umso mehr von Science. Was in diesem Heft
und um immer mehr Anwendungen. präsentiert wird, ist überwiegend Stand der Wis-
Mit Blick auf die Hydrographie schafft hoffent- senschaft, noch nicht Stand der Technik. Die An-
lich diese Ausgabe der Hydrographischen Nach- wendungen finden erst allmählich Einzug in die
richten etwas mehr Klarheit. Wir haben die Frage Praxis.
gestellt, welche Rolle künstliche Intelligenz in der Außerdem im Heft: Die Beiträge von den bei-
Hydrographie spielt. Die Antworten erfahren Sie den für den DHyG Student Excellence Award nomi-
in fünf Fachbeiträgen – zwei davon sind im Peer- nierten Absolventinnen der HCU. Cigdem Askar
Review-Verfahren begutachtet worden – und im vergleicht verschiedene Sedimentecholote für die
Wissenschaftsgespräch mit Professor Alexander Anwendung in flachen Gewässern (Seite 54). So-
Reiterer vom Fraunhofer-Institut für Physikalische phie Andree entwickelt Open-Source-Bibliothe-
Messtechnik IPM in Freiburg (Seite 42). ken für die Prozessierung hydrographischer Daten
In den Fachbeiträgen geht es um Steine auf (Seite 48).
dem Gewässerboden, die künstliche Intelligenz Und Peter Ehlers blickt in einem angemessen
in Messdaten von Fächerecholoten bzw. Seiten- langen Beitrag auf die hundertjährige Geschichte
sichtsonaren erkennen soll (Feldens et al., Seite 6, der IHO zurück (Seite 62).
und Christensen, Seite 24); es geht um die auto- Ich wünsche Ihnen eine erkenntnisreiche Lektü-
matische »Erkennung und Klassifizierung von ben- re dieser Ausgabe.
Hydrographische Nachrichten Chefredakteur:
HN 119 – Juni 2021 Lars Schiller
E-Mail: lars.schiller@dhyg.de
Journal of Applied Hydrography
Redaktion:
Offizielles Organ der Deutschen Hydrographischen Peter Dugge, Dipl.-Ing.
Gesellschaft – DHyG Horst Hecht, Dipl.-Met.
Holger Klindt, Dipl.-Phys.
Herausgeber: Dr. Jens Schneider von Deimling
Deutsche Hydrographische Gesellschaft e. V. Stefan Steinmetz, Dipl.-Ing.
c/o Innomar Technologie GmbH Dr. Patrick Westfeld
Schutower Ringstraße 4
18069 Rostock Hinweise für Autoren und Inserenten:
www.dhyg.de > Hydrographische Nachrichten >
ISSN: 1866-9204 © 2021 Mediadaten und Hinweise
HN 119 — 06/2021 3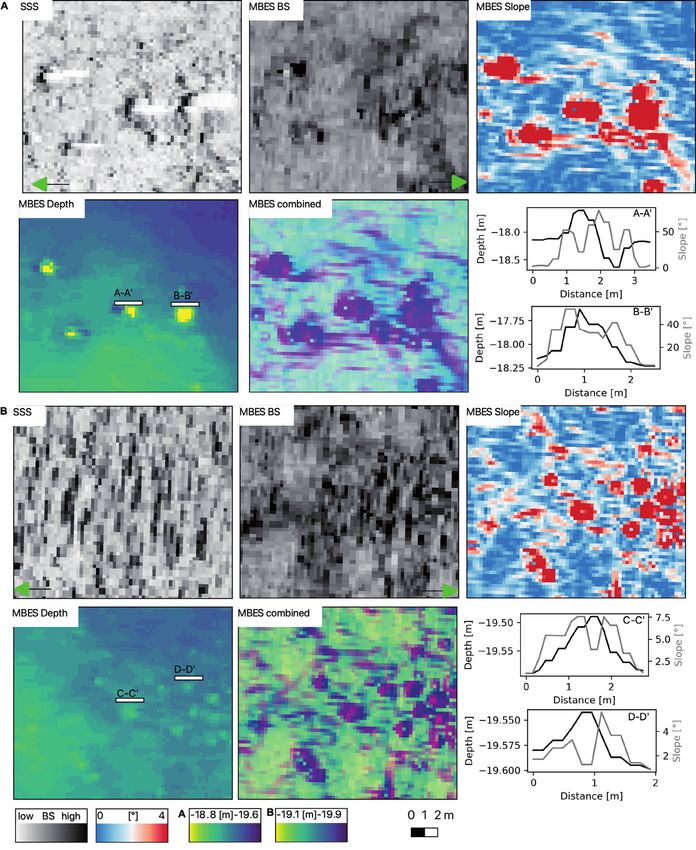
Sonic 2020 Sonic 2022
Sonic 2024 Sonic 2026
Beispiellose Leistungsfähigkeit mit 256 Beams und 1024
Soundings bei 160° Öffnungswinkel (einstellbar) und einer Pingrate
von 60 Hz
Breitbandtechnologie mit Frequenzwahl in Echtzeit zwischen 200
bis 400 kHz sowie 700 kHz optional
Dynamisch fokussierende Beams mit einem max. Öffnungswinkel
von 0,5° x 1° bei 400 kHz bzw. 0,3° x 0,6° bei 700 kHz
Höchste Auflösung bei einer Bandbreite von 60 kHz, bzw. 1,25 cm
Entfernungsauflösung
Kombinierbar mit externen Sensoren aller gängigen Hersteller
Flexibler Einsatz als vorausschauendes Sonar und der Fächer ist
vertikal um bis zu 30° schwenkbar
Zusätzliche Funktionen wie True Backscatter und Daten der
Wassersäule
MultiSpectral Modus™, der es den R2Sonic-Systemen ermöglicht,
Backscatter Daten mehrerer Frequenzen in einem einzigen Durch-
lauf zu sammeln
Nautilus Marine Service GmbH ist der kompetente Partner in
Deutschland für den Vertrieb von R2Sonic Fächerecholotsystemen.
Darüber hinaus werden alle relevanten Dienstleistungen wie Instal-
lation und Wartung kompletter hydrographischer Vermessungssys-
teme sowie Schulung und Support für R2Sonic Kunden angeboten.
R2Sonic ist ein amerikanischer Hersteller von modernen Fächerecho-
loten in Breitbandtechnologie. Seit Gründung des Unternehmens
im Jahr 2009 wurden weltweit bereits mehr als 1.500 Fächerlote
ausgeliefert und demonstrieren so eindrucksvoll die
außergewöhnliche Qualität und enorme Zuverlässigkeit dieser
Vermessungssysteme.
Nautilus Marine Service GmbH · Alter Postweg 30 · D-21614 Buxtehude · Phone: +49 4161-559 03-0 · info@nautilus-gmbh.com
R2Sonic, LLC · 5307 Industrial Oaks Blvd. · Suite 120 · Austin, Texas 78735 · U.S.A. · Phone: +1-512-891-0000 · r2sales@r2sonic.com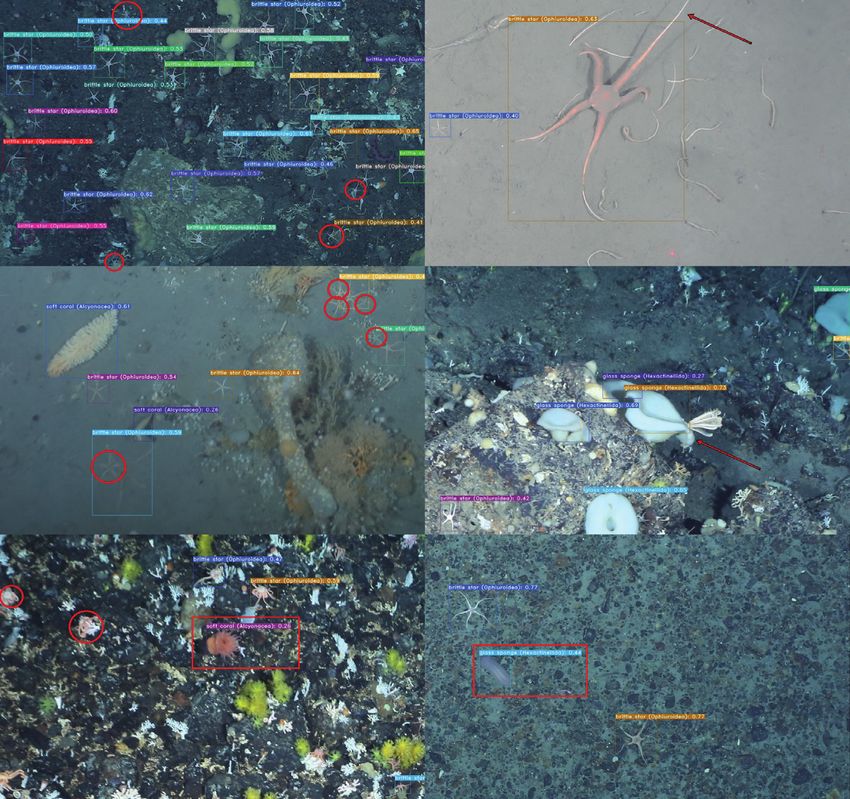
Inhaltsverzeichnis
KI in der Hydrographie
Bolder detection I
6 Automatic detection of boulders by neural networks
A comparison of multibeam echo sounder and side-scan sonar performance
A peer-reviewed paper by PETER FELDENS, PATRICK WESTFELD, JENNIFER VALERIUS,
AGATA FELDENS and SVENJA PAPENMEIER
Image classification
18 Deep learning-based detection of marine images
and the effect of data-driven influences
A peer-reviewed paper by MONA LÜTJENS and HARALD STERNBERG
Boulder detection II
24 Automatic boulder identification in side-scan sonar
An article by JESPER HAAHR CHRISTENSEN
Synthetische Trainingsdaten
30 Erzeugung von synthetischen Seitensichtsonar-Bildern mittels Generative Adversarial Networks
Ein Beitrag von YANNIK STEINIGER, JANNIS STOPPE, DIETER KRAUS und TOBIAS MEISEN
Autonomous operations
36 AI is enabling a transformation toward autonomous hydrographic operations
An article by SARAFINA MCPHERSON KIMØ
Wissenschaftsgespräch
42 »Die riesigen Flächen unterhalb der Wasseroberfläche bilden
das perfekte Szenario für KI-basierte Ansätze«
Ein Wissenschaftsgespräch mit ALEXANDER REITERER
DHyG Student Excellence Award I
48 Interactive processing of MBES bathymetry and backscatter data
using Jupyter Notebook and Python
An article by SOPHIE ANDREE
DHyG Student Excellence Award II
54 Comparison of different sub-bottom profiling systems to be
used in very shallow and tide-influenced areas
A case study in the backbarrier tidal flat of Norderney, Germany
An article by CIGDEM ASKAR
Company presentation
60 Meeting requirements for new types of on-demand survey campaigns
An article by ANDRES NICOLA and DANIEL ESSER
IHO anniversary
62 100 years of international cooperation in hydrography
An article by PETER EHLERS
Die nächsten Fokusthemen
HN 120 (Oktober 2021) Habitatkartierung
HN 121 (Februar 2022) Häfen und Verkehre der Zukunft
HN 122 (Juni 2022) Meerestechnik
HN 119 — 06/2021 5
Boulder detection I DOI: 10.23784/HN119-01
Automatic detection of boulders
by neural networks
A comparison of multibeam echo sounder
and side-scan sonar performance
An article by PETER FELDENS, PATRICK WESTFELD, JENNIFER VALERIUS, AGATA FELDENS and SVENJA PAPENMEIER
Neural networks show great promise in the automatic detection of boulders on the
seafloor. Maps derived from bathymetric data show better performance compared to
backscatter mosaics in this study. However, we find the lack of training data ground-
truthed to a high standard the largest challenge for automated object detection based
on acoustic data.
boulder detection | neural networks | hydrographic surveying | bathymetry | backscatter
Erkennung von Felsbrocken | neuronale Netze | Seevermessung | Bathymetrie | Backscatter
Neuronale Netze sind sehr vielversprechend bei der automatischen Erkennung von Felsbrocken auf dem
Meeresboden. Aus bathymetrischen Daten abgeleitete Karten zeigen in dieser Studie eine bessere Leis-
tung im Vergleich zu Rückstreumosaiken. Die größte Herausforderung für die automatische Objekterken-
nung auf Basis akustischer Daten ist jedoch der Mangel an Trainingsdaten, die auf einem hohen Standard
erprobt sind.
Authors 1 Introduction ity and generalisation. Against a background of
Dr. Peter Feldens, Agata Multibeam echo sounders (MBES) have been used increasing user requirements (e.g. nautical infor-
Feldens and Dr. Svenja for decades to provide high-quality bathymetric mation service needs a consistent separation of
Papenmeier work at the maps of the seafloor (Lurton 2002; Augustin et al. seabed and boulders for chart production; marine
Leibniz Institute for Baltic Sea 1996; Pickrill and Todd 2003). The German Hydro- spatial planning requires information about condi-
Research Warnemünde. graphic Office (Federal Maritime and Hydrograph- tions on the seabed to assess the impact of off-
Dr. Patrick Westfeld and ic Agency, BSH) collects bathymetry and detects shore construction projects) and the compliance
Jennifer Valerius work at objects underwater by vessel-mounted MBES with international standards (IHO S-44 Order 1a
the Federal Maritime and systems (Dehling and Ellmer 2012). The data sur- and 1b require the reliable detection of obstacles
Hydrographic Agency (BSH) in veyed in German waters are processed into official along all main shipping routes), automation of the
Rostock and Hamburg. nautical charts and nautical publications to ensure processing chain is indispensable in terms of ac-
navigational safety at sea. Accurate and reliable in- curacy, reliability and reproducibility of the results.
peter.feldens@io-warnemuende.de formation of seabed’s topography further forms a It is also required in the sense of an efficient evalu-
decisive basis for political and technical decisions ation of large areas.
relating to the sea, including applications depend- Next to hydrographic applications, recent de-
ing on spatio-temporal-resolved 3-D geodata. velopments in habitat mapping require the de-
Echo sounding is a measurement technique al- tection of cobbles and larger hard substrates. The
lowing for the 3-D reconstruction of the surface of identification of marine hard substrates based on
the seafloor and all objects located on it. As a pri- acoustic remote sensing is important for the de-
mary result, a digital surface model (DSM) is avail- tection, delineation and ecological assessment of
able. During the following data processing chain seafloor habitats (Papenmeier et al. 2020) as well
conducted at BSH, the task is to separate between as for marine spatial planning. This need is ac-
the surface measured and the actual seabed, to counted for in several international frameworks,
derive a digital terrain model (DTM) of the seafloor. such as the Convention on Biological Diversity
The detection and extraction of boulders are chal- and the Marine Strategy framework directives.
lenging. At BSH, it is realised in a semi-automatic Boulder detection in the German Baltic and the
process based on geometric filtering, with interac- North Sea for these purposes is done using side-
tive post-processing and a final visual inspection scan sonar (SSS) systems. Next to the ease of op-
by well-trained experts. This procedure is time- eration over large scales, the survey geometry
consuming and error-prone because of subjectiv- of a side-scan sonar, towed above the seafloor,
6 Hydrographische Nachrichten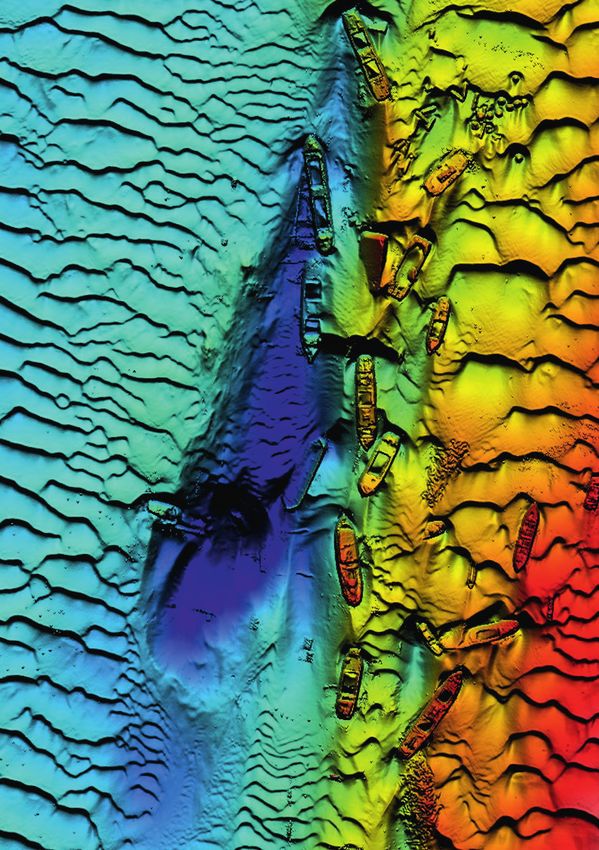
Peer-reviewed paper Boulder detection I Fig. 1: Location of the investigation site west of Fehmarn (left). Water depths in the area range between 16 m and 25 m (centre), dashed lines are the survey lines run during MBES data collection. Right: Slope calculated from the local bathymetry aids the detection of small objects. Both for man- 2 Methods ual and automatic methods, boulder detection was found to be more reliable, with an increas- 2.1 MBES ing number of pixels forming an object’s repre- Multibeam echo sounder data were collected in sentation in backscatter (BS) mosaics (Feldens summer 2019 from the hydrographic survey ves- et al. 2019). Acoustic shadows, which form be- sel VWFS Deneb, operated by BSH, by a state-of- hind boulders, increase the number of pixels of the-art MBES system Teledyne-Reson Seabat 7125- boulder representations in backscatter mosaics. SV2. The system operates at 400 kHz with a 140° Shadow sizes increase with grazing angle, thus opening angle, a pulse length of 300 µs and 512 favouring towed sonar systems (Papenmeier et beams per swath. The seafloor of the study area al. 2020). Therefore, while the spatial resolution (Fig. 1, left) was fully covered by 50 survey lines of modern MBES derived backscatter information with 100 % overlap (Fig. 1, centre). The software can rival that of side-scan sonar systems in many Teledyne PDS was used for real-time data acquisi- relevant practical applications (depending on tion. A combined GNSS (Global Navigation Satellite water depth), their survey geometry is unfavour- Systems; good global but poor relative accuracy) able for boulder detection in backscatter data. and INS (Inertial Navigation System; good local ac- However, the pixel-perfect co-registration of curacy but drifts without external reference) forms depth and backscatter and derived data sets may the basis for an accurate and reliable real-time di- offset this disadvantage and facilitate boulder rect georeferencing of MBES measurements. MBES detection based on MBES data. Considering the instruments require an accurate portrayal of the interpretation of extensive areas, human experts sound speed structure of the water column. In this have difficulties in combining information of mul- campaign, the distribution of water sound velocity ti-dimensional data sets, while machine learning was determined by continuous profile measure- algorithms are less limited by dimensionality and ments using the multi-parameter online probe more efficient (Yokoya et al. 2017). Sea & Sun Technology CTD 60Mc. Bathymetry data In the last decade, object detection frame- were processed using Teledyne CARIS HIPS & SIPS. works based on convolutional neural networks The processing chain holds techniques for i.a. cor- (CNN) were applied to different topics, including rection of sound velocity induced effects, calcula- remote sensing in the earth sciences (Ghamisi et tion of a georeferenced 3-D point cloud, genera- al. 2017; Zhu et al. 2017) with great success. CNNs tion of 3-D surface representation of the bottom were used to find boulders in side-scan sonar topography, outlier detection and filtering. backscatter mosaics, showing performance com- To create backscatter grids with a resolution of parable to human experts in areas of moderate to 0.25 m based on the multibeam echo sounder good data quality (Feldens et al. 2019). It is the aim data provided as s7k-files, angular variations in of this case study to compare the performance of intensities were removed using the open-source multibeam echo-sounder and side-scan sonar to processing toolbox MB-System (Caress and image boulders in single-band and multi-band Chayes 1996). A grazing angle of 40° (here, minor data sets including depth, slope and backscatter variations in incidence angle have little effect on intensity. An object detection framework based backscatter intensity) was used as a reference on a neural network is used to identify boulders angle. A low pass Gaussian mean filter stretching in the data sets, and the results are compared with five samples in the across-track and three samples the interpretation of human experts. in the along-track direction was applied once to HN 119 — 06/2021 7
Boulder detection I
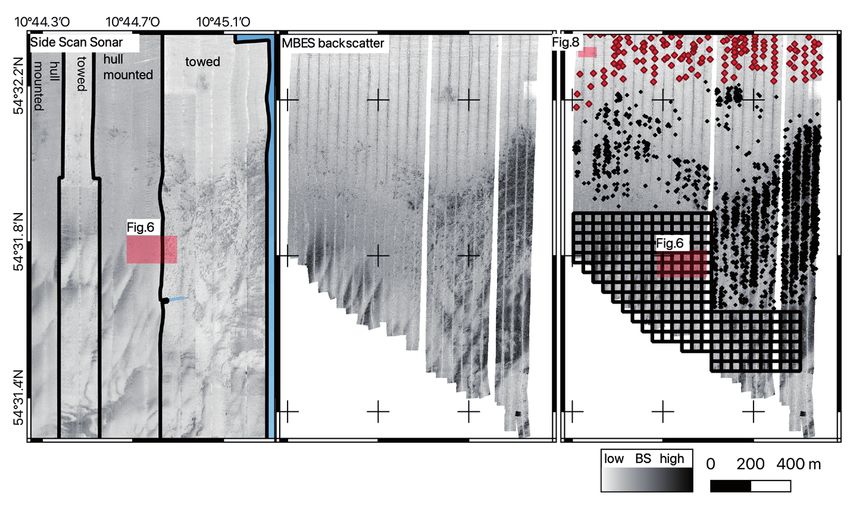
Fig. 2: Left: Side-scan sonar backscatter mosaic (0.25 cm pixel size) used for boulder
classification in this study. Centre: Multibeam echo sounder backscatter mosaic.
Right: Location of the boulders (black dots) and empty image examples (red dots) used for training of the models
based on multibeam echo sounder data. The red box represents the test area for the manual identification of
individual boulders in Fig. 6 and false positives examples in Fig. 8, respectively. The raster grid used for the manual
determination of boulders densities is indicated
the data to remove high frequency speckle noise. 4.5 kn. Using a swath-width of 200 m the profile
Data gaps of up to 1.25 m were interpolated. The distance was set to 180 m to allow an overlap of
grid was built by applying a Gaussian Weighted approximately 10 % at the edges.
Mean. As available profiles are overlapping, sam- Processing of the backscatter amplitudes was
ples of higher grazing angles were given an in- done with the software package SonarWiz 7.3.
creased priority during gridding. Profiles were run Only the higher frequency of the CSS-2000 has
in both N-S and S-N directions on the same pro- been used (600 kHz). The 4300 MPX used a fre-
file track. For the backscatter maps, one of these quency of 410 kHz. After bottom tracking and em-
directions was used, the other line was discarded. pirical gain normalisation, the data of the towed
Backscatter intensities were clipped at the 0.2 % system additionally required a correction of the
and 99.8 % percentile to improve image contrast. navigation data. The sheave offset was adjusted,
In this study, higher backscatter intensities are dis- and a layback correction was executed basing on
played in darker colours. All backscatter intensities data of a cable counter and a pressure sensor. To
are uncalibrated, relative values (Lamarche and generate a final backscatter mosaic both data sets
Lurton 2018) and were exported as 8-bit greyscale were merged. The overlapping profiles were cut at
mosaics following processing. Multi-band images the edges as far as possible without causing gaps.
of MBES-derived grids of backscatter, slope and Finally, a mosaic (8-bit greyscale) with a spatial res-
depth were created using the open source GDAL olution of 25 cm was exported (Fig. 2, left).
utilities (GDAL/OGR contributors 2021), by plac-
ing slope information in the green image channel 2.3 Manual boulder count
(Fig. 1, right), backscatter information in the red im- Two experienced human interpreters did a manual
age channel (Fig. 2, centre) and depth values in the count of individual boulders in a test area (Fig. 2,
blue image channel (Fig. 1, centre). red box) based on the side-scan sonar mosaics.
Human interpreters generally recognise boulders
2.2 SSS by an increased backscatter intensity facing to-
The side-scan sonar data were recorded in May wards the side-scan sonar, followed by an acoustic
2019 during cruise #164 with the vessel VWFS shadow forming behind. The human interpret-
Deneb. The Edgetech CSS-2000 was towed at an ers were not involved in picking the training data
altitude of approximately 12 ± 3 m above the sea- for the neural networks. To interpret larger areas,
bed. Due to technical problems with the CSS-2000 a raster approach is used. For 50 m × 50 m cells
a change to the hull-mounted side-scan sonar (Fig. 2, black raster grid), the same human experts
(Edgetech 4300 MPX) became necessary dur- decided whether it includes no boulders, one to
ing the cruise (Fig. 2 shows the coverage of both five boulders, or over five boulders. This procedure
data sets). The vessel speed varied between 4 and is in line with currently published recommenda-
8 Hydrographische Nachrichten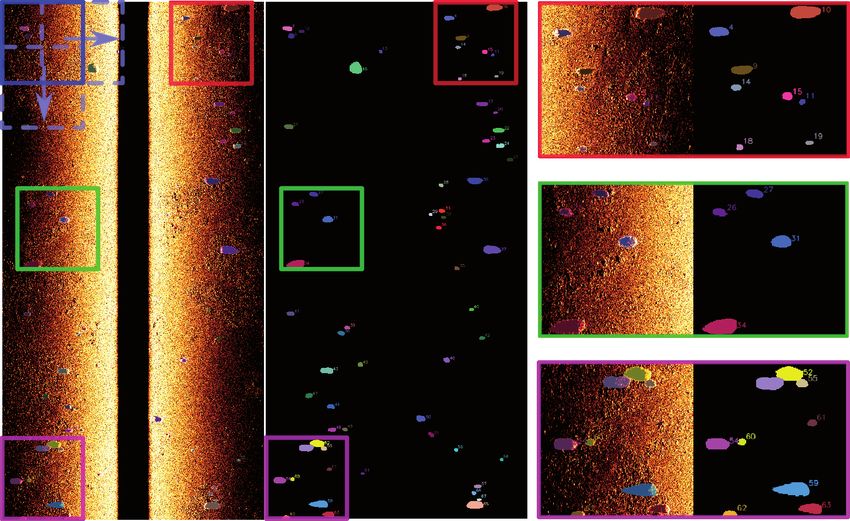
Boulder detection I tions for mapping geogenic reefs (Heinicke et al., backbone and neck) to extract object features and in press), used to characterise geogenic reefs over divide the input image into grids at three different larger areas. The agreement between the human resolutions. For each grid cell at each resolution, experts is calculated using the F₁ score of the re- it predicts the probability that the cell includes a sulting confusion matrix. An F₁ score of 1.0 indi- learned object within anchor boxes of predefined cates perfect agreement, while the lowest value is size. These probabilities and the corresponding 0, when either precision or recall are 0. The F₁ score bounding box coordinates are the output of the is calculated from the confusion matrix by F₁ = 2 × trained model. YOLO networks are available in dif- (precision × recall) / (precision + recall). Values for ferent configurations of the backbone, of which each class (no boulders, one to five boulders and we here utilise the standard configuration of YOLO more than five boulders) were averaged. version 4. 2.4 Automatic boulder count 2.4.2 Model training and application 2.4.1 Neural network To create the training data sets, a human inter- Artifical neural networks are composed of series preter identified bounding boxes of boulders in of interconnected layers of artificial neurons. In training areas in QGIS 3.16. Boulders were required a trained neural network, input signals are trans- to have a shadow. The boulders were exported as formed by changing weights at each connection, an SQLite database. The training database for the until the last layer of the network reports the re- SSS model includes 13,847 boulder instances. A sult of the computation. Convolutional neural model was trained on a data set with an empha- networks are a subset of neural networks and sis on small boulders comprising only a few pixels. were developed for image classification with over- This data set comprises 4,070 entries. The MBES whelming success. While the architecture of CNNs training database was only started with the inves- varies, all include a series of convolutional layers, tigation site reported here (Fig. 2). It is not possible that operate by convolving a small part, often 3 × 3 to use the same training data sets for MBES and pixels, of the underlying image (or the output of an SSS models, since the position accuracy of the earlier layer in the network) with weights initialised side-scan sonar is not good enough to co-locate at random. This assumes that pixels in close vicin- features of only a few pixels in size. Therefore, the ity are more likely to form patterns significant for MBES training data set comprises 2,654 instances the image context than those pixels with greater of boulders (Fig. 2), with typical sizes of 3 × 3 to distance. The weights are adjusted during model 8 × 15 pixels including shadows. The training mo- training with annotated images to minimise a loss saics were cut into small georeferenced images of function. Loss functions compare the predictions 64 × 64 pixels (corresponding to approximately of the neural network to the annotations. To allow 16 m × 16 m in this study), overlapping by six pix- CNNs learning non-linear features, activation func- els to minimise the number of training boulders tions change the output of layers in the network, that are cut by image boundaries. In the following, while regular downsampling of the image size al- the pixel coordinates of the annotated examples lows the network to learn features of larger scales. were calculated and used as an input for training. The automated boulder count was done using Besides the annotated boulder examples, 182 ex- the YOLO (You Look Only Once) framework, de- amples of empty images (defined as containing no veloped by Joseph Redmon (Redmon et al. 2015), boulders) were selected for the MBES data set and with the current implementation available under a 2,349 examples of empty images for the SSS data permissive license on GitHub (https://github.com/ set. AlexeyAB/darknet). Lary et al. (2016) and Schmid- For training, we used the YOLO network ver- huber (2015) give a detailed description of convo- sion 4, in contrast to earlier case studies that used lutional neural networks and their application for the two-stage RetinaNet framework (Lin et al. image interpretation. 2017). We adhered to suggestions published on The YOLO network was developed for object the project’s GitHub page and changed the de- detection. To identify and locate different objects fault configuration of the YOLO network. There- in images is more complicated than the classifica- fore, the maximum number of training batches tion of entire images and requires a different net- was reduced to 6,000 for MBES models and 24,000 work architecture. YOLO is a one-stage detector, for SSS models, the number of classes reduced to meaning it analyses images in one pass (hence the one, and the filter number of the convolutional abbreviation, You Only Look Once) while keeping layers before the object detection layers reduced high accuracy. One-stage detectors are a faster to 18. Images were magnified to 512 × 512 pixels approach compared to other object detection before training. Random variations in hue, expo- frameworks that rely on multiple stages for object sure and saturation applied to the image were re- detection in images. The YOLO architecture is de- duced from their standard settings to 0.1. The size scribed by Bochkovskiy et al. (2020). In principle, it of the input image was changed by 40 % every uses a series of different convolutional layers (the ten batches at random, and the size and aspect HN 119 — 06/2021 9
Boulder detection I Fig. 3: The appearance of boulders in the different data sets. A) At a distance of 45 m to the nadir individual boulders are recognised in SSS backscatter. The same boulders (27 m to the nadir) are more difficult to recognise in MBES backscatter. The boulders are visible in bathymetry, slope, and combined data sets. B) Small boulders as imaged in the outer part (75 m to nadir) of a side-scan sonar swath. The characteristic boulder pattern is hard to recognise and appears smeared in the along-track direction, due to yaw movements or decreasing along-track resolution. The appearance of boulders is difficult to interpret in MBES (20 m to nadir) backscatter, but the objects are recognised in slope, bathymetry and combined data sets. The position of SSS images was shifted by several metres to account for positional differences to the MBES. The green arrow points to the nadir. SSS data was recorded with a CSS-2000 10 Hydrographische Nachrichten
Boulder detection I
ratio were also changed by ±60 % for each image. up also controls the local slope shown in Fig. 1.
The optimal anchor sizes for the YOLO network While high pixel-to-pixel slopes exceeding 60° at
were calculated. 15 % of the training samples were maximum prevail in the areas of glacial lag depos-
randomly selected for validation and used to cal- its due to the presence of boulders and near the
culate the average precision for the boulder class trawl marks, the remaining area is flat with slope
(AP) of the different networks. After the image set values below 2°.
for validation was separated, a Python script ro- Based on a visual inspection, we find most boul-
tated every image in 45° steps to account for vari- ders in the area composed of glacial lag deposits,
able survey directions. The training took place on with some also present in the sandy facies. The
a NVIDIA 2080 TI graphic card (11 GB RAM). Training boulders have different characteristics in the data
of the MBES models required about twelve hours sets that are displayed in Fig. 3. In the SSS-derived
for the MBES models and 40 hours for the large backscatter mosaics, boulders can be recognised
SSS model. by a high backscatter front, an intermediate in-
For model application, the training procedure is tensity signal behind and an acoustic shadow at
reversed. The (single or multi-band) mosaic is cut the back, relative to the side-scan sonar position.
into small georeferenced image tiles of 64 × 64 However, small boulders are often more difficult to
pixels. Threshold values for include objects were interpret. This is caused either by their small size
set to 0.2 for all models except the SSS model for or their position in the outer part of the swath (a
small objects, which was set to 0.35. The model is combination of which is shown in Fig. 3B). In addi-
run on these small tiles. The detection of objects tion, artefacts in side-scan sonar data can resem-
on a single image requires about 10 ms on an ble smaller boulders. Such artefacts include scatter
NVIDIA 2080 TI. The pixel-coordinates of the result- from water column stratification or areas near the
ing bounding boxes are converted to geographic side-scan sonar nadir.
coordinates and displayed using QGIS. To emulate In MBES-derived backscatter, boulders are rec-
the raster approach used by human experts to ognised by an increase in backscatter intensity
cover large areas, detected boulders in each grid compared to the surrounding seafloor (Fig. 3) but
cell are counted. are often lacking a pronounced acoustic shadow.
The backscatter representation of boulders is less
3 Results distinct compared to SSS imagery in close to inter-
mediate distance to the nadir. Boulders are imaged
3.1 Local geology and appearance of boulders as circular to elliptic features in maps of the local
Water depths in the investigation site (approxi- slope. Slope values for boulders range from 3.5° to
mately 2 km²) vary between 16 m and 25 m, with more than 60° degrees, related to the large vari-
depths increasing towards the north. Backscatter ety of boulder shapes in transported lag deposits
maps derived from MBES and SSS show different transported by glaciers. Also, boulders may be par-
seafloor facies at the site (Fig. 2), with fine-grained tially buried in the subsurface. However, not all cir-
deposits and intensive disturbance by bottom cular features correspond to increased backscatter
trawling activities in the north (low backscatter). intensities, for example in the areas of overlapping
High backscatter intensities characterise glacial profiles. In MBES-derived maps of depth, boulders
lag deposits towards the south and east. A high are displayed as circular features elevated 2.5 cm
number of boulders are part of these deposits. In- to over 50 cm compared to the adjacent seafloor.
termediate backscatter intensities towards south
and west characterise fine to medium sands and 3.2 Manual boulder identification
partial outcrops of glacial lag deposits. In the side- For a test area of about 30,000 m², two experi-
scan sonar mosaics, which cover a larger area, a enced human interpreters picked boulders on the
series of elongated, elevated ridges exist in the side-scan sonar backscatter mosaic (Fig. 4). The
southeast. The general sedimentological build- test area showcases instances of water column
Fig. 4: Manual interpretation of boulder occurrence in the test area based on SSS backscatter data.
The number of identified objects is 26 and 54. Refer to Fig. 2 for location
HN 119 — 06/2021 11Boulder detection I
Fig. 5: Top: Number of boulders identified with the raster approach by the slope-model and to human experts.
Bottom: Individual detection of the slope-model are plotted on top of the expert II interpretation. Coloured cell boundaries
visualise the difference in interpretation between the human experts. A) Example of a potential boulder not noticed by
the experts. B) A potential false positive detection of the model. C) Detections near the side-scan sonar nadir, where no
judgment of the model detections is possible. For C, the slope map is shown in addition
stratification on the eastern side, a nadir stripe in F₁ score, measuring the agreement between the
the centre of the area and an overlap of two differ- two experts, is 0.61 based on 196 raster cells.
ent profiles recorded with different side-scan so-
nars towards the west. The experts found 26 and 3.3 Automated boulder detection
54 boulders. No human misinterpreted the water The Average Precision (AP) of the models on the
column artefacts, nadir stripes or overlapping pro- validation data is shown in Table 1. The highest
files as boulders. A higher variability exists in the performance is 64 % by the slope-only model, fol-
outer parts of the swath near the overlapping pro- lowed by a model working on a 3-band data set
files, where the appearance of potential boulders comprising MBES backscatter, slope and depth
varies. The same human experts interpreted boul- with 61 % AP. The MBES backscatter-only model
der densities over a larger area using the raster ap- achieves an AP of 18 %. The side-scan sonar per-
proach applied to 50 m × 50 m cells (Fig. 5). Dense formance is 37 % to 43 %, with the lower AP for the
boulder assemblages were confirmed in the east training data set with a focus on small objects. The
towards the outcropping glacial till, while boulders detections of the best-performing slope-model
are sparse towards west. Corresponding to the dif- are plotted on top of boulder densities as deter-
ferent number of individual boulders found in the mined by human experts (Fig. 5).
test area, expert I identified a larger area covered The resulting detections of the models in the
by one to five boulders compared to expert II. The test area are shown in Fig. 6. The SSS models
find a total of 35 boulders, all including a discern-
Data set Model AP ible shadow on visual inspection. One likely false
MBES SLOPE 64 % positive occurs around water column stratifica-
tion artefacts and one false positive in the nadir
MBES DEPTH SLOPE BACKSCATTER 61 %
region. The MBES backscatter model finds a total
SSS BACKSCATTER large objects 43 % of 29 boulders. Of these, seven have no discern-
ible shadow, while the remaining display at least
SSS BACKSCATTER small objects 37 %
one pixel of acoustic shadows behind. The mod-
MBES DEPTH 36 % el working on the area-wide bathymetric grids
MBES BACKSCATTER 18 % detects 14 boulders with elevations of 6 cm to
40 cm compared to the surrounding seafloor,
Table 1: Overview of performance on the validation data set albeit most boulders smaller than 15 cm are not
(measured in AP) for the different models and data sets recognised in the data set. The slope model finds
12 Hydrographische NachrichtenBoulder detection I 59 objects at the test site, characterised by slopes slope data set. However, several potential boulders ranging from 35° to less than 3.5°. However, most found in the slope data set were not found by the identified boulders show slope values of over 4°. combined model and vice versa, with examples The model running on the combined data set of shown in Fig. 7. Here, a comparison with the in- backscatter, slope and depth detects 53 boulders. dependently recorded side-scan sonar data – bar- Most of these boulders are also recognised in the ring some uncertainty because of the positional Fig. 6: Boulders found by the models in the test area in the different data sets. For the SSS backscatter mosaic, magnified insets show the similarity of small boulders and artefacts due to water column stratification and near- vertical incidence. Refer to Fig. 2 for location HN 119 — 06/2021 13
Boulder detection I
inaccuracy that required shifting the side-scan 4 Discussion
sonar mosaic location by a few metres – seems The high difference of boulder detection by very
to show that the slope data is correct, and these experienced human interpreters (Fig. 3) shows
objects should have been identified as boulders. the need for an objective, automatic method for
In contrast, in the northern test area (Fig. 8), circu- boulder detection. The different count of individ-
lar elevated features are identified as boulders by ual boulders transfers to an agreement of 0.61 (F₁
the slope-model. We find similar examples, not score) over 196 cells that were interpreted with the
displayed here, in areas with remaining outliers in raster approach. This poses a significant challenge
morphological data which have a similar appear- both for quantification of model performance
ance. Such outliers cause artificial slopes but do and for the establishment of correctly annotated
not affect backscatter data information. training images, a problem faced by many other
The results of the raster approach using the applications of neural networks to remote sensing
model with the highest AP (the slope-model) are data (Zhu et al. 2017). The same person interpret-
shown in Fig. 5. The slope-model identifies be- ing the training database and the reference sites
tween 0 and 42 boulders in the 50 × 50 m cells. for boulder detection (Feldens et al. 2019) partially
The agreement with the human experts I and II as mitigates the problem. However, this approach
measured by the F₁ score for 182 cells (cells where does not scale to more than one involved person
both SSS and MBES data are available) is 0.75 and or to applications where objective results without
0.63, respectively. interpreter bias are required. Almost no study in-
cludes an extensive ground truthing for boulders
Fig. 7: Boulders detected by the MBES-models are displayed. Boulders are verified in the side-scan
sonar image, whose position was shifted to account for positional inaccuracies. Near the nadir, potential
boulders are not imaged in MBES backscatter data, while present in the slope map (blue rectangle).
Vice versa, the backscatter map displays increased backscatter intensities in areas where no increased
slope exists (red rectangle). No boulders are detected in both areas by the combined model working on
depth-slope and backscatter channels. Refer to Fig. 6 for colour scales
14 Hydrographische NachrichtenBoulder detection I Fig. 8: Test area composed of fine sediments with a marked impact of bottom trawling activity. Because of the fine sediment composition, it can be assumed no boulders are present in this area. The model working on slope data detects several false positives in the area, while models running on backscatter, depth and the combined multi-band image report no false positives. Refer to the northwest of Fig. 2 for location in acoustic data, and – except for obvious instanc- model to detect small boulders – as required by es – the interpretation of a human interpreter of regulations – is increased, the amount of false what is and what is not a boulder varies based on positive identifications increases as well. Because his/her experience, with no possibility to judge of the absence of well ground-truthed reference what is the correct interpretation. The appearance sites, a calculation of meaningful precision-recall and visibility of boulders in backscatter data can curves to find optimal threshold values is not pos- change with swath width and incidence angle (Pa- sible. Tuning the threshold level of the model to penmeier et al. 2020; von Rönn et al. 2019). While a the local conditions (e.g., the number of artefacts methodological description on how to assess geo- in the data) is done manually, which is a subjec- genic reefs exists (Heinicke et al., in press), it de- tive procedure. A possible solution is to include fines no sufficient criteria to decide which objects nadir and water column stratification effects as are to be identified as boulders in acoustic data. distinct classes and define these areas as insuffi- Still, our case study allows qualitative insight cient for boulder detection. While MBES snippet- into the advantages and disadvantages of SSS derived backscatter data is not affected by water and MBES-based boulder mapping by neural net- column stratification and is used for object detec- works. To mitigate the impact on AP for the dif- tion (e.g., Kunde et al. 2018), individual boulders ferent models, a single person confirmed all sam- are not displayed in the specular regime (Fig. 7) at ples in the training database used for this study. near-vertical incidence angle and are resolved in Therefore, model performance is only compared less detail compared to side-scan sonar images in relative to the interpretation of the acoustic data the data (Fig. 2). The loss of detail may be caused by one human expert and not to the true seafloor by a different along-track resolution due to dif- conditions. Both SSS and MBES systems supply ferent opening angles of the used systems (0.5° backscatter information. A problem of SSS-based at 400 kHz for the Reson 7125, CSS-2000: 0.26° boulder detection are artefacts (Wilken et al. 2012), at 600 kHz, respectively 0.29° at 410 kHz for the e.g., near the nadir or in areas of water column 4300 MPX). Combined with the less pronounced stratification that can in their structure resemble acoustic shadows, the AP of the MBES backscatter small boulders (Fig. 6). Due to the requirements to model data set, therefore, is worse compared to detect tiny objects comprising only 7 to 9 pixels in the model trained on side-scan sonar backscatter the examples shown here and even less if objects data (Table 1). MBES-based backscatter maps can- of 25 cm in size are to be detected in acoustic data not be recommended as the principal data source (von Rönn et al. 2019), there is limited information for boulder detection based on our case study. to differentiate between artefacts and real objects. An obvious problem related to the use of MBES This causes a trade-off during the training of side- bathymetry and derived slope values is the re- scan sonar-based models: if the sensitivity of the quired thorough cleaning of the data, with outli- HN 119 — 06/2021 15
Boulder detection I
ers or morphological features having similarities possible (Beisiegel et al. 2019), and changing depth
to small boulders in slope maps. An example of intervals between different sites (and thus chang-
such morphological feature in the German Baltic ing resolution in colour-coded depth images) may
Sea is related to bottom trawling (Fig. 8). The trawl be problematic. We suggest exploring the use of
doors create steep local, almost circular morpho- further depth-derived information, such as the
logical features when lifted off the seafloor. These bathymetric position index, or texture parameters
features are misinterpreted by the slope-only derived from backscatter mosaics in the future.
model as boulders. The backscatter model cor- Models working on a combination of depth,
rectly ignores these features. The combination of slope and backscatter data produced false nega-
backscatter and slope data also prohibit false posi- tives in the near-nadir region, as boulders are not
tives in the combined model. Therefore, while the imaged in the backscatter channel. They also show
AP of the slope model is the best on the valida- fewer false positives and are less susceptible to re-
tion data overall (Table 1), it also produced unde- maining outliers in bathymetric data. Therefore,
sirable false positives in areas where boulders are while the performance of the joint depth-slope-
very unlikely to appear (Fig. 7). The pixel-perfect backscatter data set is worse than for the slope-
coregistration of depth and backscatter informa- only model (due to validation examples in the
tion by multibeam echo sounders can mitigate nadir region) in our case study, its inherent robust-
this downside. Being the best model in our case ness to false positives by combining independent
study, the slope-model results were compared data sets makes it the method of choice for practi-
with the human raster-based interpretation of a cal applications in the future. Ideally, and needed
larger area. The F₁ score of the model compared to for many commercial applications anyway, an over
the human experts is 0.75 and 0.62. Both scores are 100 % overlap would remove the near-vertical in-
higher than the score for the direct comparison of cidence backscatter data and is expected to im-
the human experts, although the number of raster prove model results. Multi-band images with cali-
cells counted is not identical due to the different brated backscatter data collection (Lamarche and
extension of available SSS and MBES data. Position- Lurton 2018) would also allow for a quantitative
al inaccuracies between the side-scan sonar and definition of boulders, e.g., by measuring increase
multibeam echo sounder data of approximately of backscatter intensity in addition to local slope
5 m may negatively impact the comparison of cells and local bathymetric position index.
where boulders are situated close to the edges. In
hindsight interpretation of the model-human dif- 5 Conclusion
ferences, potential errors on both sides were iden- Our case study shows that boulders are detected
tified (examples shown in Fig. 5). In addition, the with higher precision in bathymetric data com-
slope data is less affected than backscatter inten- pared to backscatter mosaics recorded by either
sity by survey geometry and finds boulders that multibeam echo sounder or side-scan sonar. The
could not be identified in the side-scan sonar data results of the best model are comparable to the
because they are located close to the nadir. range of results achieved by human interpret-
The poorer performance of the MBES depth-de- ers. We recommend combining bathymetry and
rived model compared to the slope model is not backscatter data into a multi-band image to limit
surprising, given that the maximum resolution of false positive detections. However, the limiting
the input image is the regional depth interval di- factor for the automated detection of boulders in
vided by the available discrete pixel values. In our acoustic data is not the technology, but the do-
study, this is 9 m divided by 256 (28 bpp, bit per main knowledge and the availability of accurately
pixel), artificially limiting the vertical resolution to annotated training images. Future activities should
ca. 0.035 m in the single band 8-bit image. Given involve the careful choice of sites for ground-truth-
that many boulders have smaller elevations (Fig. 2) ing and acoustic surveys, to create a high-quality
and are visible in slope maps, the performance training data set. //
of the depth model is good and may have great
potential for models operating on point clouds Acknowledgment
and derived statistics which became available in The authors thank Elham Al-Akrami for initial prep-
the last years (Held and Schneider von Deimling aration of MBES-related training data set, and Mer-
2019; Guo et al. 2020). The advantages and disad- le Hennig for support in digitising boulders on the
vantages of including absolute depths as an input SSS mosaics. We thank the crew of VWFS Deneb
channel for neural networks must be considered, for their great support during the measurement
however. In the Baltic Sea, for example, finding campaigns, and the two reviewers who provided
boulders in deeper muddy basins is unlikely, but helpful and constructive comments.
16 Hydrographische NachrichtenBoulder detection I References Augustin, Jean-Marie; Raymond Le Suavé et al. (1996): Lamarche, Geoffray; Xavier Lurton (2018): Recommendations Contribution of the multibeam acoustic imagery to for improved and coherent acquisition and processing of the exploration of the sea-bottom. Marine Geophysical backscatter data from seafloor-mapping sonars. Marine Researches, DOI: 10.1007/BF00286090 Geophysical Research, DOI: 10.1007/s11001-017-9315-6 Beisiegel, Kolja; Franz Tauber et al. (2019): The potential Lary, David J.; Amir H. Alavi et al. (2016): Machine learning in exceptional role of a small Baltic boulder reef as a solitary geosciences and remote sensing. Geoscience Frontiers, habitat in a sea of mud. Aquatic Conservation: Marine and DOI: 10.1016/j.gsf.2015.07.003 Freshwater Ecosystems, DOI: 10.1002/aqc.2994 Lin, Tsung-Yi; Priya Goyal et al. (2017): Focal Loss for Dense Bochkovskiy, Alexey; Chien-Yao Wang, Hong-Yuan Mark Liao Object Detection. arxiv: 1708.02002 (2020): YOLOv4: Optimal Speed and Accuracy of Object Lurton, Xavier (2002): An introduction to underwater Detection. arXiv: 2004.10934 acoustics: principles and applications. Springer Science & Caress, David W.; Dale N. Chayes (1996): Improved processing Business Media of Hydrosweep DS multibeam data on the R/V Maurice Papenmeier, Svenja; Alexander Darr et al. (2020): Ewing. Marine Geophysical Researches, DOI: 10.1007/ Hydroacoustic Mapping of Geogenic Hard Substrates: BF00313878 Challenges and Review of German Approaches. Dehling, Thomas; Wilfried Ellmer (2012): Zwanzig Jahre Geosciences, DOI: 10.3390/geosciences10030100 Seevermessung seit der Wiedervereinigung. AVN Vol. 119, Pickrill, Richard A.; Brian J. Todd (2003): The multiple roles Nr. 7, S. 243–248 of acoustic mapping in integrated ocean management, Feldens, Peter, Alexander Darr et al. (2019): Detection of Canadian Atlantic continental margin. Ocean & Coastal Boulders in Side Scan Sonar Mosaics by a Neural Network. Management, DOI: 10.1016/S0964-5691(03)00037-1 Geosciences, DOI: 10.3390/geosciences9040159 Redmon, Joseph; Santosh Divvala et al. (2015): You Only Look GDAL OGR contributors (2021): GDAL/OGR Geospatial Data Once: Unified, Real-Time Object Detection. DOI: 10.1109/ Abstraction software Library. Open Source Geospatial CVPR.2016.91 Foundation Schmidhuber, Juergen (2015): Deep learning in neural Ghamisi, Pedram; Javier Plaza et al. (2017): Advanced Spectral networks: An overview. Neural Networks, DOI: 10.1016/j. Classifiers for Hyperspectral Images: A review. IEEE neunet.2014.09.003 Geoscience and Remote Sensing Magazine, DOI: 10.1109/ von Rönn, Gitta Ann; Klaus Schwarzer et al. (2019): Limitations MGRS.2016.2616418 of Boulder Detection in Shallow Water Habitats Using Guo, Yulan; Hanyun Wang et al. (2020): Deep learning High-Resolution Sidescan Sonar Images. Geosciences; for 3d point clouds: A survey. IEEE Transactions on DOI: 10.3390/geosciences9090390 Pattern Analysis and Machine Intelligence, DOI: 10.1109/ Wilken, Dennis; Peter Feldens et al. (2012): Application of 2D TPAMI.2020.3005434 Fourier filtering for elimination of stripe noise in side-scan Heinicke, Kathrin; Tim Bildstein; Dieter Boedecker (in press): sonar mosaics. Geo-Marine Letters, DOI: 10.1007/s00367- Leitfaden zur großflächigen Abgrenzung und Kartierung 012-0293-z des LRT 1170 »Riffe« in der deutschen Ostsee (Untertyp: Yokoya, Naoto; Claas Grohnfeldt; Jocelyn Chanussot geogene Riffe) (2017): Hyperspectral and Multispectral Data Fusion: Held, Philipp; Jens Schneider von Deimling (2019): New A comparative review of the recent literature. IEEE Feature Classes for Acoustic Habitat Mapping – A Geoscience and Remote Sensing Magazine, DOI: 10.1109/ Multibeam Echosounder Point Cloud Analysis for Mapping MGRS.2016.2637824 Submerged Aquatic Vegetation (SAV). Geosciences, Zhu, Xiao Xiang; Devis Tuia et al. (2017): Deep learning in DOI: 10.3390/geosciences9050235 remote sensing: A comprehensive review and list of Kunde, Tina; Philipp Held et al. (2018): Ammunition detection resources. IEEE Geoscience and Remote Sensing Magazine, using high frequency multibeam snippet backscatter DOI: 10.1109/MGRS.2017.2762307 information. Marine Pollution Bulletin, DOI: 10.1016/j. marpolbul.2018.05.063 HN 119 — 06/2021 17
Image classification DOI: 10.23784/HN119-02
Deep learning-based detection of
marine images and the effect of
data-driven influences
An article by MONA LÜTJENS and HARALD STERNBERG
Throughout recent years convolutional neural networks have been applied for various
image detection tasks. Training data thereby plays an important role for the perfor-
mance of those models. Not only the amount of images is crucial but also the number
of annotations, classes as well as image dimensions. In view of changing underwater
environments, the study of benthic communities is increasingly important especially
in the Southern Ocean as they provide a key link for ecosystem shifts. This study con-
centrates on the automatic detection and classification of benthic species using deep
learning. It could be shown that glass sponges, brittle stars and soft corals could suc-
cessfully be detected even on few input data and highly biased class distributions in
varying underwater scenes. Further analyses considering data-driven influences show
significant performance declines regarding the training on single objects and classes
per image and the evaluation on large image dimensions.
deep learning | automatic detection | underwater imagery | benthos
Deep Learning | automatische Detektion | Unterwasserbilder | Benthos
In den letzten Jahren wurden gefaltete neuronale Netze für verschiedene Aufgaben der Bilderkennung
eingesetzt. Die Trainingsdaten spielen dabei eine wichtige Rolle für die Leistungsfähigkeit dieser Modelle.
Dabei ist nicht nur die Menge der Bilder entscheidend, sondern auch die Anzahl der Annotationen, Klas-
sen sowie die Bilddimensionen. Angesichts sich verändernder Unterwasserumgebungen wird die Unter-
suchung benthischer Lebensgemeinschaften vor allem im Südlichen Ozean immer wichtiger, da sie hier
vor allem sensibel auf Veränderungen reagieren. Diese Arbeit konzentriert sich auf die automatische Er-
kennung und Klassifizierung von benthischen Arten mittels Deep Learning. Es konnte gezeigt werden,
dass Glasschwämme, Schlangensterne und Weichkorallen selbst bei wenigen Eingabedaten und stark
unterrepräsentierten Klassen in unterschiedlichsten Unterwasserlandschaften erfolgreich erkannt werden.
Weitere Analysen zu datengetriebenen Einflüssen zeigen deutliche Leistungseinbußen bei einzelnen Ob-
jekten und Klassen pro Bild während des Trainings und großen Bilddimensionen während der Evaluation.
Authors 1 Introduction an increasing amount of underwater imagery has
Mona Lütjens is Research Global ocean temperature rise and ocean acidifica- emerged raising the need for automatic analytical
Associate at HafenCity tion are ubiquitous and threaten especially benthic methods. Recent research in full automatic detec-
University in Hamburg. communities in the Southern Ocean where many tion and classification of marine images deploy
Harald Sternberg is Professor species survive only in a narrow thermal range deep learning algorithms as they show superior re-
for Hydrography at HafenCity (Griffiths et al. 2017). To detect current ecosystem sults for unconstrained underwater environments,
University in Hamburg. shifts, studies regarding the abundance of mega non-iconic images and variant image deformations
benthic species can provide information as they (Gonzalez-Cid et al. 2017). The latter is one of the
mona.luetjens@hcu-hamburg.de are very sensitive to environmental change (Pie- main challenges as objects in marine images are
penburg et al. 2017). Sponges should be especially greatly changing due to different lightning condi-
investigated as they create and shape habitats for tions, rotation of the camera system, lens distor-
other species like brittle stars and a decrease in tion and noise (Pavoni et al. 2021). To account for
sponges might directly lead to a decrease in many this, multilayer convolutional neural network (CNN)
other species as well (Mitchell et al. 2020). models are introduced. Learned features can be
One of the main methods to study megaben- recognised regardless of their position or imaging
thic species is through optical imagery. It is a fast condition and without previous image preproc-
and non-destructive sampling method and opti- essing or human supervision. In computer vision
cal systems are typically mounted on towed or re- tasks, two main methods for recognising multiple
motely operated vehicles. In light of its advantages, objects have emerged: object detection and in-
18 Hydrographische NachrichtenPeer-reviewed paper Image classification
stance segmentation. The output of an object de-
tector is a set of bounding boxes around detected
objects whereas instance segmentation computes
pixel-accurate masks around detected objects and
is thus able to grasps the shape of objects. Gen-
erating training data for instance segmentation is
very laborious and masks are typically generated in
a second step after the bounding box detection.
Since this study simply focuses on the detection
of marine species without the necessity to capture
shapes of features, instance segmentation was not
implemented. Several previous works deal with the
classification and detection of fish (Salman et al.
2016; Christensen et al. 2018) or benthic communi-
ties (Boulais et al. 2020) using state-of-the art mod-
els such as LeNET, SSD via MobileNet and RetinaNet
via ResNet50, respectively.
For CNNs the amount of training data is consid-
ered to be the main driver for accurate network
Fig. 1: Synthetically derived image compositions by placing cut out foregrounds
inference. Also, better results are achieved with
onto cropped backgrounds
deeper layered networks because features can
be learned at more diverse levels of abstractions.
As more layers of neurons are added to the net- in the western Weddell Sea in 2019 (Purser et al.
work, different feature details ranging from low- 2021). Seafloor images were obtained using the
level features such as lines or dots to high-level towed Ocean Floor Observation and Bathymetric
features such as common objects or shapes are System (Purser et al. 2019). For this study images
trained to be recognised. Networks with multi- from seven different sampling stations at distinct
ple layers are thus better at generalising because depths and with diverse seafloor types were used
they learn more discriminative features (Pauly et al. to incorporate various environmental alterations
2017). However, deeper layered networks typically in the network training process. The original 3840
consists of several million of parameters, increas- × 5760 sized images were tiled rather than down
ing the demand of more training data. Therefore, sampled to 1440 × 960 to keep the input resolu-
training data sets are commonly augmented by tion but decreasing the need for computational re-
changing the rotation, sharpness, perspective and sources during training. Image annotation for the
brightness (Huang et al. 2019) to produce more in- three object classes was conducted on 1000 im-
put data in a cost and time effective way. In view of ages using the web-based annotation tool COCO
successful training, it is further important to con- Annotator (Brooks 2019). The selected image set
sider data related design choices such as number was split so that 700 images belong to the training
of annotations and classes per image during train- set, 100 images to the validation set and 200 im-
ing as well as the image input size. While consider- ages to the test set. After labelling it was evident
ing image sizes ranging from 96 to 224 pixels, it that a high class imbalance persists because of the
could be shown that the accuracy linearly increas- 3550 annotations from the training set, 87 % of the
es (Mishkin et al. 2017). labels belong to the class brittle stars, 8 % to the
This paper investigates the effect of data driven class glass sponges and 5 % to the class soft corals.
influences on the model accuracy in an attempt to
create a road map for optimal input training data 2.2 Data augmentation
with regards to number of annotations and classes Data augmentation was conducted using the
per image, class imbalance and image sizes ex- image generator COCO Synth (Kelly 2019) which
ceeding those in previous mentioned studies. For composes new images by placing cut out objects
the detection of benthic morphotypes the state- as foreground over plain seafloor images. The
of-the-art network CenterMask (Lee and Park 2019) foregrounds are randomly altered in brightness,
via ResNeXt-101 (Xie et al. 2017) was utilised which rotation, scale and amount. For training, a total
is trained on the three classes: glass sponges, soft of 12,000 synthetic images were created from 30
corals and brittle stars. foregrounds per class and 30 background images
(Fig. 1). It is noted, that the selected foregrounds
2 Data and backgrounds originate from images that are
not part of the original training set mentioned in
2.1 Underwater imagery data set section 2.1. Also, to alleviate class imbalance 4000
A seabed survey to investigate the epibenthos was images of the 12,000 images are solely composed
carried out during the PS118 cruise of RV Polarstern of glass sponges and soft corals changing the ratio
HN 119 — 06/2021 19Sie können auch lesen