Intelligente Bauwerke Verfahren zur Auswertung, Verifizierung und Aufbereitung von Messdaten - Berichte der Bundesanstalt für Straßenwesen
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Intelligente Bauwerke
Verfahren zur
Auswertung,
Verifizierung und
Aufbereitung von
Messdaten
Heft B 164
Berichte der Bundesanstalt für Straßenwesen
Berichte der
Bundesanstalt für Straßenwesen
Brücken- und Ingenieurbau Heft B 164
ISSN 0943-9293
ISBN 978-395606-576-7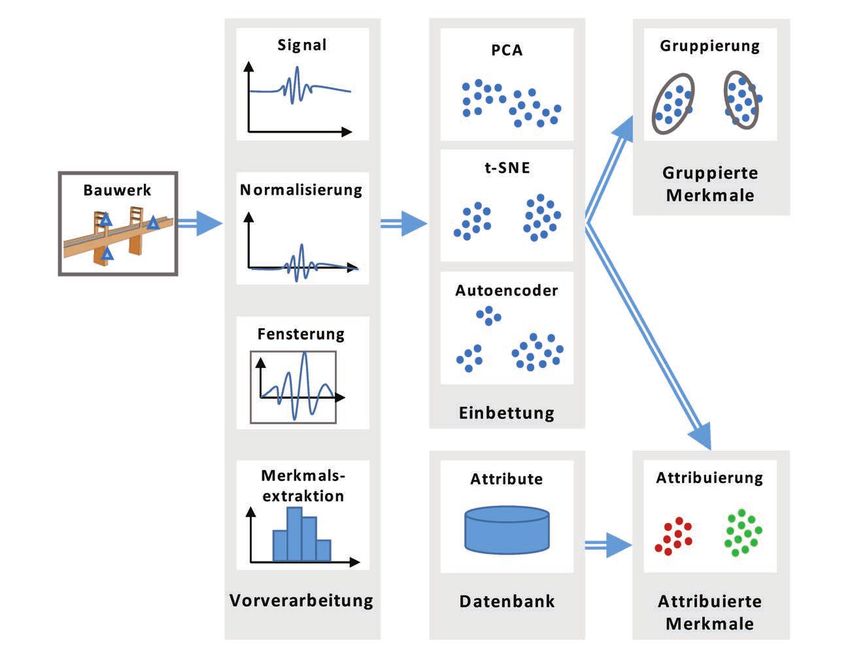
Intelligente Bauwerke
Verfahren zur
Auswertung,
Verifizierung und
Aufbereitung von
Messdaten
von
Markus Kleinert
Felix Sawo
Knowtion GmbH
Karlsruhe
Berichte der
Bundesanstalt für Straßenwesen
Brücken- und Ingenieurbau Heft B 164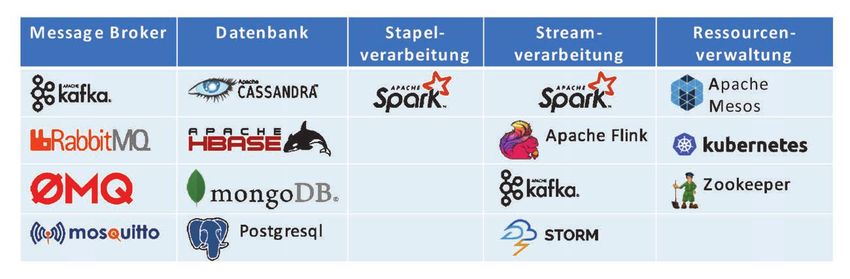
Die Bundesanstalt für Straßenwesen veröffentlicht ihre Arbeits- und Forschungs- ergebnisse in der Schriftenreihe Berichte der Bundesanstalt für Straßenwesen. Die Reihe besteht aus folgenden Unterreihen: A - Allgemeines B - Brücken- und Ingenieurbau F - Fahrzeugtechnik M- Mensch und Sicherheit S - Straßenbau V - Verkehrstechnik Es wird darauf hingewiesen, dass die unter dem Namen der Verfasser veröffentlichten Berichte nicht in jedem Fall die Ansicht des Herausgebers wiedergeben. Nachdruck und photomechanische Wiedergabe, auch auszugsweise, nur mit Genehmigung der Bundesanstalt für Straßenwesen, Stabsstelle Presse und Kommunikation. Die Hefte der Schriftenreihe Berichte der Bundesanstalt für Straßenwesen können direkt bei der Carl Ed. Schünemann KG, Zweite Schlachtpforte 7, D-28195 Bremen, Telefon: (04 21) 3 69 03 - 53, bezogen werden. Über die Forschungsergebnisse und ihre Veröffentlichungen wird in der Regel in Kurzform im Informationsdienst Forschung kompakt berichtet. Dieser Dienst wird kostenlos angeboten; Interessenten wenden sich bitte an die Bundesanstalt für Straßenwesen, Stabsstelle Presse und Kommunikation. Die Berichte der Bundesanstalt für Straßenwesen (BASt) stehen zum Teil als kostenfreier Download im elektronischen BASt-Archiv ELBA zur Verfügung. https://bast.opus.hbz-nrw.de Impressum Bericht zum Forschungsprojekt 15.0636 Intelligente Bauwerke - Verfahren zur Auswertung, Verifizierung und Aufbereitung von Messdaten Fachbetreuung Sarah Windmann Referat Betonbau Herausgeber Bundesanstalt für Straßenwesen Brüderstraße 53, D-51427 Bergisch Gladbach Telefon: (0 22 04) 43 - 0 Redaktion Stabsstelle Presse und Kommunikation Druck und Verlag Fachverlag NW in der Carl Ed. Schünemann KG Zweite Schlachtpforte 7, D-28195 Bremen Telefon: (04 21) 3 69 03 - 53 Telefax: (04 21) 3 69 03 - 48 www.schuenemann-verlag.de ISSN 0943-9293 ISBN 978-395606-576-7 Bergisch Gladbach, Mai 2021
3 Kurzfassung – Abstract Intelligente Bauwerke: Verfahren zur Aus Smart bridges: Techniques for assessment, wertung, Verifizierung und Aufbereitung verification and preparation of measurement von Messdaten data Das Forschungsvorhaben FE 15.0636/2016/GRB The research project FE 15.0636/2016/GRB follows schließt an das Forschungsvorhaben FE 15.0548/ the previous project FE 15.0548/2011/ GRB with the 2011/GRB an und hatte die Weiterentwicklung und aim to further develop and test model-based and Erprobung der im Rahmen dieses Projektes erar- statistical data analysis methods for bridge beiteten modellbasierten und statistischen Analyse- monitoring based on modern methods of artificial verfahren, bei denen auch moderne Methoden aus intelligence research. The focus was mainly on der künstlichen Intelligenzforschung eingesetzt techniques for sensor data validation and anomaly werden, zum Ziel. Der Fokus lag dabei vor allem auf detection as well as the extraction of relevant Verfahren zur Sensordatenplausibilisierung und Er- information from large datasets. For the validation kennung von Anomalien sowie auf Verfahren zur of sensor data a robust filtering algorithm was used, Extraktion relevanter Informationen aus umfangrei- which is tolerant to outliers in the measured signal. chem Datenmaterial. Für die Sensordatenplausibili- For this algorithm it was shown that the necessary sierung wurde ein besonders robustes Filterverfah- model parameters can be learned from represen- ren eingesetzt, das tolerant gegenüber Ausreißern tative datasets for simple signals of single physical in den Messwerten ist. Für dieses Verfahren wurde parameters. For more complex signals of multiple gezeigt, dass die benötigten Modellparameter bei related parameters the relationship between ex- einfachen Signalverläufen einzelner physikalischer ternal influences on a bridge structure and the Größen anhand von repräsentativen Beispielda- structure’s reactions was developed. The techniques tensätzen gelernt werden können. Für komplexere were evaluated based on data recorded at the Signale mehrerer zusammenhängender physikali- bridge BW 402e, which was equipped with partially scher Größen wurde gezeigt, wie eine Lösung redundant sensor networks for research purposes. durch explizite Modellierung erreicht werden kann. Finally, software architectures were developed, Außerdem wurde ein Verfahren zur Untersuchung which allow the realization of large-scale bridge von Zusammenhängen in Sensormessdaten entwi- monitoring systems. ckelt. Die Evaluation der Verfahren geschah an- hand von Daten, die an dem Brückenbauwerk BW 402e, welches zu Forschungszwecken mit teils re- dundanten Sensornetzen ausgestattet wurde, erho- ben wurden. Schließlich wurden Softwarearchitek- turen erarbeitet, die die Realisierung von Brücken- monitoringsystemen im großen Maßstab ermögli- chen sollen.
5
Inhalt
1 Einleitung . . . . . . . . . . . . . . . . . . . . . . 7 4.3.2 Plausibilisierung von Temperatur-
daten mit dem ORKF . . . . . . . . . . . . . . 23
1.1 Zielstellung . . . . . . . . . . . . . . . . . . . . . . 7
4.4 Plausibilisierung zusammenhängen-
1.2 Anwendungsszenarien . . . . . . . . . . . . . 7
der physikalischer Größen . . . . . . . . . . 26
1.2.1 Überwachung von Einzelkomponen-
ten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7 4.4.1 Plausibilisierung von Temperatur
und Luftfeuchte. . . . . . . . . . . . . . . . . . . 26
1.2.2 Überwachung des Gesamtbau-
werkes . . . . . . . . . . . . . . . . . . . . . . . . . 7 4.4.2 Explizite physikalische Modellierung:
Temperaturausgleichsmodell . . . . . . . . 28
1.3 Lösungsansätze . . . . . . . . . . . . . . . . . . 7
4.4.3 Modell für Wärmeaustausch zwischen
1.3.1 Anomalieerkennung . . . . . . . . . . . . . . . 7 Außenbereich, Hohlkastenwand und
1.3.2 Klassifikation . . . . . . . . . . . . . . . . . . . . 8 Hohlkasteninnern . . . . . . . . . . . . . . . . . 28
1.4 Überblick . . . . . . . . . . . . . . . . . . . . . . . 8 4.4.4 Modell für Wärmeaustausch
zwischen Außenbereich und Hohl-
kastenwand . . . . . . . . . . . . . . . . . . . . . 30
2 Literaturübersicht. . . . . . . . . . . . . . . . 9
4.5 Zusammenfassung. . . . . . . . . . . . . . . . 32
3 Erste Untersuchung der Sensor
daten . . . . . . . . . . . . . . . . . . . . . . . . . . 12 5 Gesamtkonzept für die algorith
3.1 Datenimport . . . . . . . . . . . . . . . . . . . . . 12 misch gestützte Sensordaten
analyse für Brückenbauwerke . . . . . 33
3.2 Abgeleitete Mindestanforderungen . . . 13
5.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . 33
3.2.1 Anforderungen an die Abtastrate . . . . . 13
5.2 Beschreibung des algorithmischen
3.2.2 Anforderungen an die Synchronisa- Ablaufs . . . . . . . . . . . . . . . . . . . . . . . . . 33
tion der Sensordaten . . . . . . . . . . . . . . 13
5.2.1 Datenerfassung . . . . . . . . . . . . . . . . . . 34
3.2.3 Anforderungen an die Datenqualität. . . 14
5.2.2 Vorverarbeitung . . . . . . . . . . . . . . . . . . 34
4 Plausibilisierung Messsystem 5.2.3 Einbettung . . . . . . . . . . . . . . . . . . . . . . 37
und Sensordatenfusion . . . . . . . . . . . 14 5.2.4 Gruppierung . . . . . . . . . . . . . . . . . . . . . 38
4.1 Einleitung . . . . . . . . . . . . . . . . . . . . . . . 14 5.2.5 Attribuierung . . . . . . . . . . . . . . . . . . . . . 39
4.2 Beschreibung der eingesetzten 5.2.6 Kombinierte Auswertung mehrerer
Verfahren . . . . . . . . . . . . . . . . . . . . . . . 15 Sensorsignale. . . . . . . . . . . . . . . . . . . . 40
4.2.1 Verfahren zur Filterung und Glättung
5.3 Detaillierte Beschreibung der
von Daten . . . . . . . . . . . . . . . . . . . . . . . 15
einzelnen Algorithmen . . . . . . . . . . . . . 42
4.2.2 Bestimmung von Modellparametern
5.3.1 Zuordnung von zu unterschiedlichen
mit dem Expectation-Maximization-
Zeitpunkten extrahierten Signal-
Algorithmus . . . . . . . . . . . . . . . . . . . . . 18
fenstern zu einzelnen Fahrzeug-
4.2.3 Verfahren zur Detektion von überfahrten . . . . . . . . . . . . . . . . . . . . . . 42
Anomalien . . . . . . . . . . . . . . . . . . . . . . 19
5.3.2 Skalenraumanalyse zur Bestimmung
4.3 Plausibilisierung einzelner physika- der Fenstergrößen . . . . . . . . . . . . . . . . 44
lischer Größen . . . . . . . . . . . . . . . . . . . 20
5.3.3 Fahrspurdetektionen . . . . . . . . . . . . . . 48
4.3.1 Plausibilisierung von Temperatur-
5.3.4 Einbettung . . . . . . . . . . . . . . . . . . . . . . 49
daten anhand von Smoothing
Splines . . . . . . . . . . . . . . . . . . . . . . . . . 20 5.3.5 Gruppierung . . . . . . . . . . . . . . . . . . . . . 51
6
5.4 Interpretation der Streudiagramme . . . 53
5.4.1 Auswertung einzelner Sensoren . . . . . 53
5.4.2 Kombinierte Auswertung mehrerer
Sensoren . . . . . . . . . . . . . . . . . . . . . . . 54
5.5 Anwendungsfälle . . . . . . . . . . . . . . . . . 54
5.5.1 Untersuchung von Temperatur-
einflüssen . . . . . . . . . . . . . . . . . . . . . . . 54
5.5.2 Untersuchung der Einflüsse von
Fahrzeugüberfahrten . . . . . . . . . . . . . . 55
5.5.3 Untersuchung des Zusammenhangs
zwischen Messdaten von Sensoren
am Lager und von in Querrichtung
zur Fahrbahn messenden Sensoren . . . 57
6 Softwarearchitekturen für die
Brückenüberwachung . . . . . . . . . . . . 59
6.1 Komponenten . . . . . . . . . . . . . . . . . . . . 59
6.2 Anpassung der Architektur an
verschiedene Anforderungen . . . . . . . . 59
6.2.1 Toleranz gegenüber Netzwerkausfall . . . 59
6.2.2 Anpassung an beschränkte Netz-
werkbandbreite und Speicherplatz . . . . 60
6.2.3 Echtzeit- und Stapelverarbeitung . . . . . 60
6.2.4 Skalierbarkeit . . . . . . . . . . . . . . . . . . . . 61
6.3 Übersicht vorhandener Technologien. . . 62
7 Zusammenfassung und Ausblick . . . 63
Literatur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
Bilder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
Tabelle . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
7
1 Einleitung 1.2.1 Überwachung von Einzelkomponenten
Für die Beurteilung der Zuverlässigkeit und Restle-
1.1 Zielstellung
bensdauer eines Bauwerkes ist es hilfreich, kriti-
Hauptziel dieses Projektes ist die Untersuchung ak- sche Einzelkomponenten zu überwachen, um mög-
tueller Verfahren aus den Bereichen der Sensorda- liche Ausfälle rechtzeitig vorhersagen zu können.
tenfusion und des maschinellen Lernens hinsicht- Im Falle der betrachteten Autobahnüberführung
lich ihrer Einsatzmöglichkeiten an intelligenten Bau- sind kritische Komponenten beispielsweise die La-
werken. Der Begriff „intelligentes Bauwerk“ bezeich- ger des Überbaus sowie der Fahrbahnübergang.
net hierbei Bauwerke, die mit Sensoren ausgestat- Diese Komponenten werden regelmäßig dyna-
tet sind, die es ermöglichen, über die gesamte Le- misch belastet und verschleißen daher besonders
benszeit des Bauwerkes hinweg Daten aufzuzeich- schnell. Deshalb wurden diese Komponenten sei-
nen, die Aufschluss über den augenblicklichen Zu- tens des Herstellers mit Kraft-, Druck-, Weg-, und
stand des Bauwerks geben. Beschleunigungssensoren ausgestattet, anhand
deren Messungen Aussagen bezüglich des Zu-
Zu diesem Zweck wird in diesem Forschungsprojekt stands dieser Komponenten abgeleitet werden kön-
an das Forschungsvorhaben „Intelligente Bauwerke nen sollen.
– Anforderungen an die Aufbereitung von Messgrö-
ßen und ihrer Darstellungsform“, siehe [1], ange- Die Konzentration auf Einzelkomponenten erfolgt
knüpft. Dort wurden bereits erste Verfahren im Hin- auch in der Erwartung, dadurch nützliche Aussagen
blick auf ihre Eignung für die Plausibilisierung und über Verhaltensänderungen des Bauwerkes treffen
Aufbereitung von Messreihen einzelner Sensoren zu können, ohne dazu das gesamte Bauwerk mo-
entwickelt und untersucht. Allerdings konnten da- dellieren zu müssen. Diese Reduktion der Komple-
mals noch keine Erfahrungen mit Sensordaten ei- xität soll zu einfacheren Modellen und Algorithmen
ner gesamtheitlich instrumentierten Brücke gesam- führen ohne Einbußen hinsichtlich der Aussagekraft
melt werden. Daher ist es ein Ziel dieses Vorha- der Modelle hinsichtlich der betrachteten Qualitäts-
bens, die entwickelten Konzepte anhand von der parameter in Kauf zu nehmen.
BASt bereitgestellten realen Sensordaten eines
ausgewählten Bauwerks zu evaluieren. Weiterhin
1.2.2 Überwachung des Gesamtbauwerkes
lag der Fokus in dem Vorgängerprojekt auf der Ver-
arbeitung von Messreihen einzelner Sensoren. Im Zur Untersuchung einiger Eigenschaften des ge-
Gegensatz hierzu soll in diesem Projekt auch unter- samten Bauwerkes ist es nicht ausreichend, nur auf
sucht werden, inwiefern Messreihen mehrerer Sen- die Sensordaten der instrumentierten Einzelkompo-
soren für die Ableitung höherwertiger Informationen nenten zurückzugreifen. Vielmehr sind hierfür Da-
herangezogen werden können. ten verschiedenartiger, über das gesamte Bauwerk
verteilter Sensoren notwendig. Daher werden in
diesem Projekt synchron erfasste Messdaten von
1.2 Anwendungsszenarien Dehnungs-, Verschiebungs-, und Beschleunigungs-
sensoren eines Systems, das speziell für die Erfas-
An dem Bauwerk BW 402e, das die Fahrbahn der sung von Verhaltensänderungen des gesamten
BAB 3 mit zwei Fahrstreifen über die Verbindung Bauwerkes und von Verkehrslasten konzipiert wur-
der BAB 9 von Regensburg nach München führt, de (RTMS – Road Traffic Management System),
wurden im Zuge einer vollständigen Erneuerung im ausgewertet.
Jahr 2016 verschiedene Sensornetzwerke instal-
liert. Anhand der Messdaten sollen einerseits Infor-
mationen über den Zustand kritischer Einzelkompo-
nenten des Bauwerkes, nämlich des Fahrbahn- 1.3 Lösungsansätze
überganges und der Lager, andererseits aber auch 1.3.1 Anomalieerkennung
Aussagen über den Gesamtzustand des Bauwer-
kes und die Umweltbedingungen abgeleitet wer- Allgemein wird unter einer Anomalie eine Abwei-
den. Die zu diesem Zweck installierten Sensornetz- chung von einem üblicherweise beobachteten Ver-
werke motivieren die im Folgenden aufgeführten halten verstanden. Bei diesem Projekt entstehen
Anwendungsfälle für die Ableitung höherwertiger In- solche Unregelmäßigkeiten beispielsweise auf-
formationen aus den gegebenen Messreihen. grund von Sensordefekten, Bauwerksveränderun-
8
gen oder Einwirkungen auf das Bauwerk von au- 1.3.2 Klassifikation
ßen. Für die Anomalieerkennung sollten in diesem
Projekt hauptsächlich modellfreie Algorithmen oder Die Klassifikation unterscheidet sich von der im vor-
Algorithmen mit einfachen Modellen eingesetzt wer- herigen Absatz beschriebenen Anomalieerkennung
den. Modellfrei bedeutet hierbei, dass Modelle nicht dadurch, dass die aufgenommenen Sensordaten
vom Nutzer vorgegeben werden, sondern von den einer von mehreren Klassen zugeordnet werden
Algorithmen zur Laufzeit erstellt werden. Dies ist zu sollen. Zunächst kann die Anomalieerkennung als
unterscheiden von Verfahren, die sich auf detaillier- Spezialfall der Klassifikation mit genau zwei Klas-
te vorgegebene Modelle des Bauwerkes, wie bei- sen, einer Normalklasse und einer Fehlerklasse,
spielsweise Finite-Elemente-Modelle (FE-Modelle) aufgefasst werden. Bei der praktischen Anwendung
stützen. sind die Fehlerfälle jedoch oftmals nicht im Voraus
bekannt, sodass hier hauptsächlich Daten für den
Besteht die Aufgabenstellung darin, mögliche Feh- Normalfall zur Verfügung stehen, mit denen das
lerzustände zu erkennen, ist eine bewährte Vorge- Normal-Modell erstellt wird. Im Gegensatz hierzu
hensweise die Erstellung eines „Normal-Modells“, benötigen Klassifikationsverfahren typischerweise
vgl. [2]. Ein solches Normal-Modell beschreibt das eine große Menge Beispieldaten für jede Klasse.
Verhalten eines Systems im fehlerfreien Zustand
und wird anhand von an dem System im fehlerfrei-
en Zustand aufgezeichneten Sensordaten automa- 1.4 Überblick
tisch erstellt. Hierfür dienen die Sensordaten des
betrachteten Systems als Eingabe für ein maschi- Zunächst gibt Kapitel 2 einen Überblick über frühe-
nelles Lernverfahren, das relevante Merkmale aus re wissenschaftliche Arbeiten, bei denen Methoden
den Daten extrahiert und mit dem vorliegenden Ver- des maschinellen Lernens zur Überwachung von
halten im fehlerfreien Fall korreliert. Später aufge- Bauwerken eingesetzt wurden. Dabei liegt der Fo-
zeichnete Sensordaten werden dann mit diesem kus hauptsächlich auf Verfahren zur Tragwerks-
Normal-Modell verglichen und Abweichungen wer- überwachung.
den als Anomalie ausgegeben.
Kapitel 3 fasst die Ergebnisse einer zu Beginn des
Das hier allgemein beschriebene Vorgehen lässt Projektes durchgeführten ersten Analyse der Sen-
sich prinzipiell sowohl auf Einzelkomponenten, wie sordaten zusammen und leitet Mindestanforderun-
die instrumentierten Lager oder den Fahrbahnüber- gen an deren Qualität ab.
gang, als auch auf das gesamte Brückenbauwerk
In Kapitel 4 werden verschiedene Verfahren zur
anwenden. Allerdings ist davon auszugehen, dass
Anomalieerkennung für die Plausibilisierung von
sich die Verfahren je nach Anwendungsfall unter-
Sensordaten vorgestellt und ihre Anwendung auf
scheiden werden. Beispielsweise könnten für die
aufgezeichnete Wetterdaten demonstriert.
Untersuchung des Verhaltens des gesamten Bau-
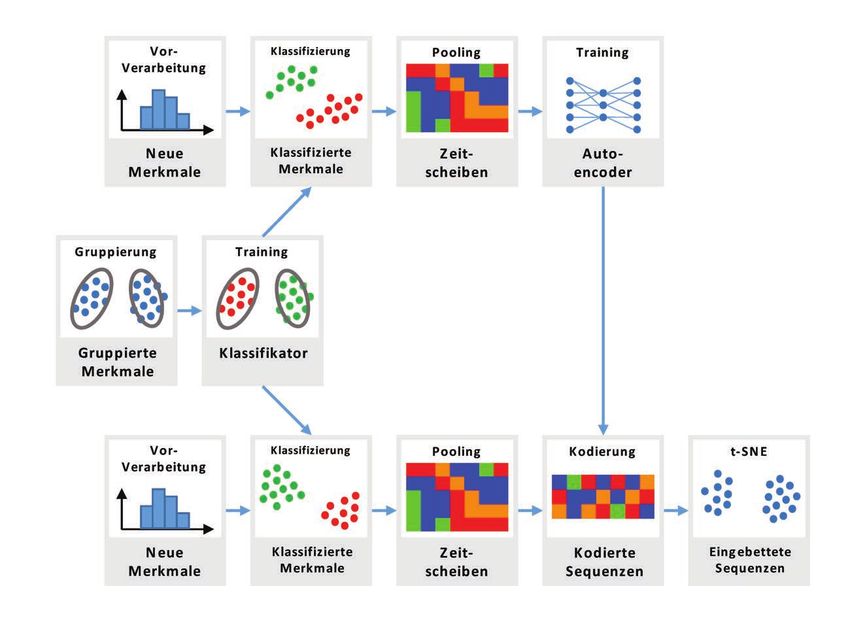
werks eher Verfahren geeignet sein, die das Kapitel 5 stellt das in diesem Projekt entwickelte
Schwingungsverhalten des Bauwerkes analysie- Konzept zur algorithmisch gestützten Sensordaten-
ren, während für die Untersuchung von Einzelkom- analyse für Brückenbauwerke vor. Das Verfahren
ponenten eher lokale, gradientenbasierte Merkmale soll Experten bei der Erkennung von Zusammen-
herangezogen werden könnten. hängen in umfangreichen an einem Brückenbau-
werk aufgezeichneten Daten unterstützen. Dazu
Für die Bewertung der Verfahren zur Anomalieer-
wird eine Kombination von Gruppierungsalgorith-
kennung eignen sich bestimmte Extremereignisse,
men und Klassifikationsverfahren eingesetzt, um
für die der Zeitpunkt des Auftretens bekannt ist. Ex-
Sequenzen von in mehreren Kanälen beobachteten
treme Wettersituationen sind ein Beispiel für solche
Signalmustern zu kodieren.
Extremereignisse. Das Auftreten von Extremwetter-
situation lässt sich unter Umständen aus den Mess- Schließlich stellt Kapitel 6 Softwarearchitekturen
daten der zu dem Bauwerk gehörenden Wettersta- vor, mit denen ein großflächiger Einsatz von Verfah-
tion ablesen. ren zur Bauwerksüberwachung im gesamten Fern-
straßennetz realisiert werden könnte.
9
2 Literaturübersicht schen Modellierung als Vergleichsgrundlage die-
nen.
Dieser Literaturüberblick stellt einige grundlegen-
de Arbeiten zur automatisierten Überwachung Weiterhin wird von den Autoren auf die Bedeutung
von Tragwerkskonstruktionen (Englisch: „Structural sorgfältig ausgewählter Merkmale hingewiesen.
Health Monitoring“ (SHM)) vor und soll einen Ein- Aussagekräftige Merkmale reduzieren die Anzahl
druck vom gegenwärtigen Stand der Forschung der benötigten Trainingsbeispiele, die typischerwei-
vermitteln. Da die Beurteilung und Vorhersage der se exponentiell mit der Dimension ansteigt. Zudem
Eigenschaften von Tragwerken auch im Maschi- sollten die Merkmale möglichst frei von Umge-
nenbau, hier insbesondere im Flugzeug- und Schiff- bungseinflüssen wie Wind oder Temperatur sein,
bau, eine große Rolle spielt, stammen einige der die keine Auswirkung auf die Schadensanalyse ha-
hier aufgeführten frühen, grundlegenden Arbeiten ben sollten.
aus diesen Anwendungsgebieten. In einer weiteren Arbeit wendeten WORDEN et al.
In einer grundlegenden Arbeit untersuchten WOR- diese Prinzipien auf die Überwachung von Flug-
DEN et al. die notwendigen Voraussetzungen für zeugtragflächen an [3]. Dabei wurden aufeinander
die automatisierte Überwachung der Stabilität von aufbauend die Detektion von Schäden, deren Loka-
Tragwerkskonstruktionen [2]. Auf der Basis ihrer ei- lisierung sowie die Beurteilung ihres Ausmaßes be-
genen Erfahrung und der zum Zeitpunkt der Studie handelt. Hierfür wurden die untersuchten Tragflä-
existierenden Literatur leiteten die Autoren einige chen zu mechanischen Schwingungen angeregt
Grundprinzipien solcher Systeme ab. und Transmissionsspektren von an den Tragflächen
angebrachten Beschleunigungssensoren aufge-
Die Autoren vertreten den Standpunkt, dass eine zeichnet. Da die Autoren die zu untersuchenden
über die bloße Erkennung und Lokalisierung von Tragflächen nicht beschädigen durften, haben sie
Schäden hinausgehende Schadensanalyse, die stattdessen Teile der Tragflächen, die zu Inspekti-
beispielsweise eine Bewertung der Schadensstärke onszwecken demontiert werden können, durch ei-
oder eine Kategorisierung umfasst, in der Regel nur gene Teile ersetzt, in die gezielt Fehler eingebracht
durch den Einsatz überwachter Lernverfahren zu werden können. Dies ermöglichte eine spätere Eva-
erreichen ist. Dabei werden dem Überwachungs- luierung der Algorithmen sowie eine über die Scha-
system initial Messdaten von Schadensfällen und denserkennung und -lokalisierung hinausgehende
die damit verbundene Bewertung bzw. Kategorisie- Datenauswertung. In einem ersten Schritt wurden
rung präsentiert, anhand derer das System den Zu- die Abschnitte der Transmissionsspektren, die für
sammenhang zwischen Messdaten und Schadens- die Schadensvorhersage geeignet sind, identifi-
fällen lernen soll. Weil der gesuchte Zusammen- ziert. Diese dienten später als Merkmal für die
hang zwischen Sensormessungen und möglichen Schadenserkennung. Diese Beschränkung auf aus-
Schadenszuständen üblicherweise nicht aus der sagekräftige Abschnitte der Transmissionsspektren
Theorie abgeleitet werden kann, gibt es hierzu war den Autoren zufolge notwendig, weil die Befes-
oft keine Alternativen. Der praktische Einsatz von tigung der untersuchten Tragflächenabdeckungen
maschinellen Lernverfahren wird durch die notwen- ebenfalls einen großen Einfluss auf die aufgezeich-
dige zeit- und kostenintensive Datenerhebung er- neten Spektren hatte, und sonst mehr Trainingsda-
schwert. ten nötig gewesen wären, um den Einfluss der Be-
schädigungen von dem Einfluss der Befestigung
Allgemein weisen die Autoren darauf hin, dass für auf die Spektren zu trennen. Die Detektion von Feh-
den Einsatz von Überwachungssystemen immer lern wurde von den Autoren nur an einzelnen Teilen
eine Vergleichsgrundlage vorhanden sein muss. Im der Abdeckung demonstriert. Hierfür verwendeten
einfachsten Fall sind dies lediglich Messdaten, die sie eine Ausreißererkennung anhand der Mahalano-
im störungsfreien Betrieb erhoben wurden. Damit bis-Distanz, die auf einer einfachen, zuvor für den
kann, den Autoren zufolge, immerhin noch eine fehlerfreien Fall erstellten Statistik der extrahierten
Schadenserkennung und eventuell auch -lokalisie- Merkmale beruht. Für die Lokalisierung von Fehlern
rung durch unüberwachte Lernverfahren, die an- wurde ein Sensornetzwerk eingesetzt, mit dem Aus-
hand von im störungsfreien Betrieb aufgezeichne- reißerindikatoren berechnet werden können. Diese
ten Daten trainiert wurden, erfolgen. Unter Umstän- dienen als Eingabe für ein neuronales Netzwerk,
den können auch die Ergebnisse einer theoreti- das daraus die Nummer des entfernten Tragflä-10
chenteils vorhersagen soll. Dieses Netzwerk wurde werden, wobei keine kontrollierte externe Anregung
zuvor anhand von Daten aus dem Experiment trai- des Bauwerkes erfolgen muss, siehe [7].
niert, sodass es sich daher insgesamt um ein über-
wachtes Verfahren handelt. Ausgehend von der Beobachtung, dass mögliche
Umgebungseinflüsse vor Anwendung einer Ausrei-
SOHN et al. geben einen aktualisierten Literatur- ßerelimination mit der Mahalanobisdistanz kompen-
überblick für die Jahre 1996 – 2001 auf der Basis siert werden müssen, erweiterten CROSS et al. frü-
eines früheren Rückblicks von 1995 [4]. Auch in die- here Arbeiten von WORDEN [5] durch Verfahren
ser Arbeit wurde das Problem der Tragwerksüber- zur Kompensation der Umgebungseinflüsse [8]. Zu
wachung hauptsächlich als Mustererkennungspro- diesem Zweck führten sie das aus der Ökonometrie
blem angesehen, das mit statistischen Methoden stammende Verfahren der Kointegration von Zeit-
zu lösen ist. Bezüglich der Methodik werden die reihen ein und verglichen die damit erzielten Ergeb-
Verfahren nach Art der verwendeten Merkmale und nisse mit denen einer Kompensation durch Projekti-
der statistischen Modellierung der Merkmalsklassifi- on auf die kleinsten Hauptkomponenten. Die Koin-
kation unterschieden. Bei den Merkmalen dominie- tegration lässt sich auf Messreihen nicht-stationärer
ren solche, die aus dem Schwingungsverhalten des Prozesse mit stationärer erster Ableitung anwen-
betrachteten Bauwerks abgeleitet werden können, den. Das Verfahren identifiziert die Koeffizienten ei-
während bei der statistischen Modellierung für den ner stationären Linearkombination der nicht-statio-
Fall, dass lediglich Betriebsdaten vorhanden sind, nären Größen. Diese Linearkombination beschreibt
eine einfache Ausreißererkennung eingesetzt wird in den Messwerten gemeinsam vorkommende
und komplexere Verfahren, wie neuronale Netze Trends, die wahrscheinlich von Umgebungseinflüs-
oder genetische Algorithmen verwendet werden, sen herrühren. Dies ermöglicht die Kompensation
wenn auch Daten zu Schadensfällen vorliegen. Als der Umgebungseinflüsse. Den Autoren zufolge kön-
kritische Punkte wurden die Anfälligkeit der gemes- nen sowohl mit Kointegration als auch mit PCA
senen Frequenzparameter von Umgebungseinflüs- Merkmale generiert werden, die unabhängig von
sen und der Mangel an Erfahrungen mit realen Umgebungseinflüssen sind, aber dennoch mit den
Tragwerken genannt. Dies stimmt mit den Aussa- Schadensfällen korreliert sind. Die Autoren favori-
gen von WORDEN et al. überein [5]. sieren das Verfahren der Kointegration, da die Or-
thogonalitätsforderung an die Eigenvektoren bei
Eine Alternative zu der Auswertung von Spektren der PCA ihrer Meinung nach die Möglichkeit ein-
wurde von ZANG et al. vorgestellt [6]. Dabei werden schränkt, optimale Lösungen für den zu eliminieren-
die aufgezeichneten Zeitreihen mehrerer Sensoren den Unterraum zu finden.
einer Unabhängigkeitsanalyse (Englisch: Indepen-
dent Component Analysis, ICA) unterzogen. Die In einer vergleichenden Studie zur Schadenserken-
hierbei in einer initial durchzuführenden Lernphase nung an stabförmigen oder ebenen Strukturen un-
tersuchten FAN et al. verschiedene Verfahren hin-
bestimmte Mischmatrix enthält Merkmale der Zeit-
sichtlich ihrer Fähigkeiten zur Erkennung einfacher,
reihen, die verwendet werden, um ein neuronales
mehrfacher sowie großflächiger Schäden und ihrer
Netz zur Schadensvorhersage zu trainieren.
Robustheit gegenüber Rauschen und der Platzie-
Die in jüngster Zeit veröffentlichen Arbeiten basie- rung der Sensoren [9]. Als Vergleichsgrundlage
ren auf den gleichen Prinzipien wie die zuvor vorge- dient ein Finite-Elemente-Modell (FE-Modell). Eine
stellten grundlegenden Arbeiten und erweitern die- Besonderheit dieser Arbeit ist, dass Verfahren, die
se vor allem hinsichtlich der für die Merkmalsextrak- auf einer Auswertung der Eigenfrequenzen, der Ei-
tion und statistischen Modellierung eingesetzten Al- genformen sowie der Spannungsenergie beruhen,
gorithmen. miteinander verglichen werden. Bei dem Vergleich
schneiden die mit Mode Shape Curvature (MSC)
Viele Verfahren zur Überwachung von Bauwerken und Damage Index Method (DIM) benannten Ver-
stützen sich auf eine Analyse der Eigenfrequenzen fahren, die die Krümmung der Eigenformen bezie-
und zugehörigen Eigenformen des gesamten unter- hungsweise die Spannungsenergie analysieren,
suchten Tragwerks. Mit Methoden, die unter dem am besten ab, während Verfahren, die die Frequenz-
Sammelbegriff „Operational Mode Analysis“ (OMA) eigenschaften analysieren, als ungeeignet für die
zusammengefasst werden, können diese Analysen Schadenserkennung an komplexen Tragwerken
für bestehende Bauwerke im Betrieb durchgeführt angesehen werden.11
COMANDUCCI et al. vergleichen sechs verschie- Verfahren trotzdem noch besser ab. Die Ergebnisse
dene Verfahren zur Schadenserkennung an Brü- hängen kaum davon ab, ob Zeitreihen oder Spek-
ckenbauwerken [10]. Die Schadenserkennung ba- tren als Merkmalsvektoren verwendet werden.
siert dabei in jedem Fall auf einer Ausreißererken-
nung mit der Mahalanobisdistanz. Zunächst werden Die oben vorgestellten Verfahren haben gemein,
die Eigenfrequenzen und Eigenformen der Brü- dass sie auf einem Vergleich der an einer Struktur
ckenschwingungen in einer Trainingsphase aufge- im Normalbetrieb erhobenen Daten mit aktuellen
zeichnet. Mit diesen Daten werden verschiedene Messdaten beruhen. Abweichungen werden dann
Modelle trainiert, die den Einfluss der Umgebungs- als Schadensereignis interpretiert. Eine andere He-
bedingungen auf die Moden beschreiben sollen. rangehensweise ist, einen Vergleich mit einem Mo-
Die dabei aufgetretenen Residuen dienen als Refe- dell durchzuführen. Hierfür wird oft die sogenannte
renz für die spätere Auswertung. In der Anwen- Finite Element Model Updating-Methode einge-
dungsphase werden die gelernten Modelle einge- setzt. Grundsätzlich werden bei diesem Verfahren
setzt, um die Umgebungsbedingungen zu kompen- an der Struktur erhobene Messdaten regelmäßig
sieren, und die dabei festgestellten Residuen wer- mit Vorhersagen aus einem Finite-Elemente-Modell
den mit den Residuen aus der Trainingsphase mit (FEM) verglichen. Dann werden die Parameter des
den Methoden der Ausreißererkennung verglichen. FEM mit nicht-linearen Optimierungsverfahren so
Das Verfahren wird mit Daten, die an einem realen angepasst, dass die Abweichung zwischen Vorher-
Brückenbauwerk aufgezeichnet wurden, evaluiert. sage und Messdaten minimal ist. Sind hierbei große
Dazu wird mit einem FE-Modell ein Schadensfall si- Parameteranpassungen notwendig, so deutet dies
muliert und die dadurch hervorgerufenen Abwei- auf Fehler an der Struktur hin, die mit dem Modell
chungen auf die tatsächlichen Messwerte aufge- auch lokalisiert werden können. Ein Nachteil dieser
schlagen. Bei dem Vergleich schneidet eine Kombi- Verfahren ist die für die nicht-lineare Optimierung
nation von PCA und linearer Ausgleichung am bes- benötigte Rechenzeit.
ten ab, wenn die aufgeschlagenen Fehlerterme li-
near sind. Wenn nicht-lineare Fehler simuliert wer- MORDINI et al. stellen eine Scilab-Implementierung
den, schneidet ein lokales PCA Verfahren, bei dem eines solchen FEM-Updating Algorithmus vor, der
mehrere Hauptkomponentenanalysen auf einer auf offene FEM-Programmbibliotheken zugreift
Zerlegung des Merkmalsraums durchgeführt wer- [12]. Damit wird ein Modell für die Schadenserken-
den, am besten ab. Die Methode der Kointegration nung an Trägern und Spannseilen realisiert, das Ei-
schneidet bei der Schadenserkennung eher genfrequenzen und Eigenformen als Eingabepara-
schlecht ab, benötigt dafür aber die kürzeste Trai- meter benötigt. Die Eigenfrequenzen sollen die Er-
ningsphase. kennung von Schäden erlauben, während die Ei-
genformen Aussagen über die Ausdehnung von
TAMURA et al. verwenden die Daten von Beschleu- Schäden möglich machen sollen. Bei einer Erpro-
nigungssensoren, die an Fahrbahnübergängen ei- bung an realen Schwingungsdaten, die an Stahlsei-
ner mehrspurigen Straßenbrücke befestigt sind, um len einer Hängebrücke erhoben wurden, konnten
Defekte an Fahrbahnübergängen zu detektieren so durch Korrosion beschädigte Kabel erkannt wer-
[11]. Hierzu wurden ein unüberwachtes und ein den.
überwachtes Lernverfahren mit der Methode der
Support-Vektor-Maschinen realisiert. Als Merkmale Neben den zuvor diskutierten Verfahren zur Über-
werden sowohl Zeitreihen fester Länge als auch de- wachung der Stabilität des gesamten Tragwerks
ren Spektren verwendet. Um eine gewisse Unab- gibt es auch Verfahren zur Erfassung der individuel-
hängigkeit von Umgebungseinflüssen zu erreichen, len auf eine Brücke einwirkenden Achslasten, siehe
womit in diesem Fall vor allem die Abhängigkeit der [13] sowie [14] für einen Überblick. Diese Verfahren
Messdaten von den Typen und Geschwindigkeiten sollen eine zeitnahe Überwachung des Lastver-
der überfahrenden Fahrzeuge gemeint ist, werden kehrs sowie der auf einzelne Bauwerke wirkenden
nur Merkmale aus Zeitabschnitten verwendet, bei Spitzenlasten ermöglichen. Prinzipiell basieren die-
denen die Höhe der in dem Signal detektierten Ma- se Verfahren auf einem in [15] entwickelten Verfah-
xima einer bestimmten Reihenfolge folgt. Die Aus- ren, bei dem eine mit Dehnungssensoren ausge-
wertung ergibt, dass das unüberwachte Verfahren stattete Brücke gewissermaßen als Waage verwen-
durch diese Merkmalsauswahl deutlich verbessert det wird. Unter Zuhilfenahme von Zusatzinformatio-
werden kann. Insgesamt schneidet das überwachte nen, insbesondere Achszahl und Fahrzeugge-12
schwindigkeit, können dann unter der Annahme,
dass die Durchbiegung der Brücke proportional zu
dem Produkt aus der Fahrzeuglast und der aus der
Statik bekannten Einflusslinie ist, die individuellen
Achslasten bestimmt werden. Aufgrund dieses Vor-
gehens werden diese Verfahren im Englischen un-
ter dem Begriff „Bridge Weight in Motion (B-WIM)“
zusammengefasst.
LUBASCH stellt in seiner Dissertation ein solches
System zur Identifikation statischer Verkehrslasten
auf der Basis gemessener Querschnittsdehnungen
vor [16]. Dabei wird eine Kombination von evolutio-
nären Optimierungsverfahren und künstlichen Neu-
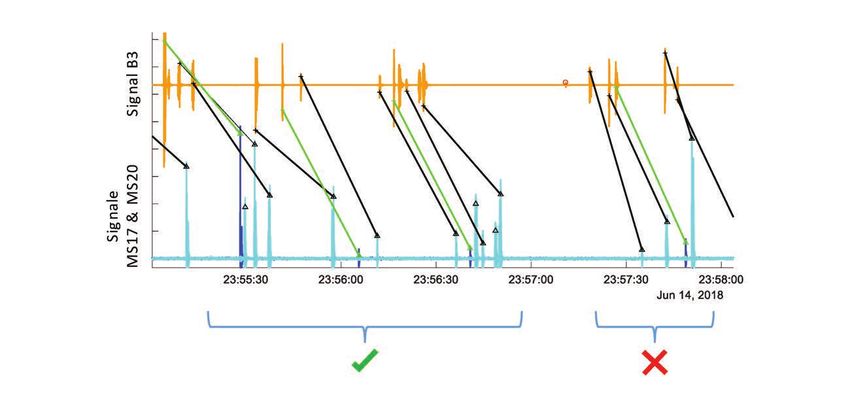
Bild 1: Messreihenausschnitt und halblogarithmische Dar
ronalen Netzen eingesetzt. Ein Vorteil dieses Ver- stellung des zugehörigen Leistungsspektrums für
fahrens ist, dass die unbekannten Parameter Fahr- den Dehnmessstreifen ‚MS17‘ des RTM-Systems
zeuggewicht, -geschwindigkeit und Achsabstände
bei der Optimierung ebenfalls bestimmt werden und
daher nicht separat erfasst werden müssen.
3 Erste Untersuchung der
Sensordaten
3.1 Datenimport
Die bereitgestellten Sensordaten konnten in die
Entwicklungsumgebung MATLAB importiert wer-
den. Für das Einlesen des binären 32-bit Diadem
Formates und der von dem Road Traffic Manage-
ment System (RTMS) aufgenommenen CSV-Datei-
en wurden zu diesem Zweck eigene Funktionen im- Bild 2: Messreihenausschnitt und halblogarithmische Darstel-
plementiert und frei verfügbare Skripte angepasst. lung des zugehörigen Leistungsspektrums für den Be-
Die an den instrumentierten Lagern aufgenomme- schleunigungssensor ‚B4‘, der zu dem instrumentierten
Fahrbahnübergang gehört
nen und im CATMAN-Dateiformat gespeicherten
Daten konnten mithilfe des mitgelieferten Skriptes
eingelesen werden. Bild 1, Bild 2 sowie Bild 3 zei-
gen beispielhaft importierte Sensordaten von jedem
der drei Messsysteme. In Bild 1 und Bild 2 wurde
der Ausschnitt so gewählt, dass ein zeitlich abge-
grenztes Signal, das sich klar vom Sensorrauschen
unterscheidet, vollständig enthalten ist. Dieser Sig-
nalverlauf ist auf die Überfahrt eines Fahrzeugs zu-
rückzuführen. Bild 3 zeigt den Temperaturverlauf,
der von einem drahtlosen Sensor des iBASt-Sys-
tems innerhalb von sieben Tagen aufgezeichnet
wurde.
Bild 3: Messreihenausschnitt für den Temperatursensor
‚1CBF4‘ des iBASt-Systems13
3.2 Abgeleitete Mindestanforderungen wurde. Ob eine weitere Reduktion der Abtastraten
möglich ist, muss unter Berücksichtigung der Auf-
3.2.1 Anforderungen an die Abtastrate gabenstellung und der dafür eingesetzten Verfah-
ren im Einzelfall untersucht werden.
Bild 1 und Bild 2 zeigen neben den Sensordaten
auch das zugehörige Leistungsspektrum in halb-
logarithmischer Darstellung. Dieses beschreibt die
3.2.2 Anforderungen an die Synchronisation
Verteilung der Signalenergie auf die einzelnen Fre-
der Sensordaten
quenzanteile. Beide Spektren weisen ein Maximum
bei der Frequenz von 0 Hz auf. Dies entspricht der Dieses Kapitel behandelt die Frage, wie gut die
konstanten Verschiebung der Signale von der Null- Sensordaten synchronisiert werden müssen, um in
linie (Gleichanteil). der Einleitung dargelegten Anwendungsszenarien
nutzbar zu sein. Generell sind die Anforderungen
Davon abgesehen gibt es deutliche Unterschiede in
an die Synchronisation der Sensordaten eng ver-
den Spektren. Das in Bild 1 gezeigte Spektrum des
knüpft mit den Anforderungen an die Abtastrate, die
Dehnungssensors weist zwei eng benachbarte,
im vorigen Kapitel diskutiert wurden. Beide hängen
stark abgegrenzte Maxima in der Nähe von 110 Hz
letztendlich davon ab, wie dynamisch das System
auf. Der Signalverlauf ähnelt daher auch einer
bzw. der zu untersuchende Teilaspekt des Systems
Schwebung, deren Amplitude exponentiell abklingt.
Dies lässt vermuten, dass hier zwei Eigenfrequen- ist. Für die Rekonstruktion verteilter Systeme sollte
zen angeregt wurden, die kritisch gedämpft sind. Im zudem auch bei der Synchronisation das Abtastthe-
Gegensatz hierzu weist das Spektrum des Be- orem eingehalten werden, d. h. die Synchronisation
schleunigungssensors in Bild 2 ein breiteres Maxi- sollte mindestens so genau sein, dass die Abtast-
mum bei ca. 150 Hz auf und fällt dann langsam ab. zeitpunkte bis zur durch das Abtasttheorem vorge-
Hier ist in dem Signal ebenfalls ein Schwebungs- gebenen Grenzfrequenz einander eindeutig zuge-
muster erkennbar, das aber stärker von weiteren Ef- ordnet werden können, wie in Bild 4 gezeigt. Aus
fekten überlagert wird. dieser Überlegung folgt die folgende Abschätzung
für die maximal tolerierbare Abweichung δtmax der
Die Spektren geben Aufschluss darüber, ob die Ab- korrespondierenden Abtastzeitpunkte der zu syn-
tastrate bei der Aufzeichnung ausreichend hoch ge- chronisierenden Signale:
wählt wurde, um das Abtasttheorem einzuhalten.
Hierzu wurden entsprechende Spektren für alle (1)
Sensoren des RTMS und der instrumentierten La-
ger sowie des Fahrbahnübergangs für jeweils zwei
Zeitfenster ausgegeben und begutachtet. Dabei In Formel (1) sind f1 und f2 die gewählten Abtastfre-
wurden keine Hinweise auf eine Verletzung des quenzen der beiden zu synchronisierenden Signale
Abtasttheorems (Aliasing) gefunden. und δtmax ist der maximal tolerierbare Synchronisie-
rungsfehler.
Für den hier gezeigten Dehnungssensor des RTMS
scheint die relevante Signalinformation im Fre-
quenzbereich bis 300 Hz enthalten zu sein, sodass
die Abtastrate von 600 Hz ausreichend ist. Die von
den Beschleunigungs- und Kraftsensoren an dem
Fahrbahnübergang aufgezeichneten Daten weisen
generell ein etwas breiteres Spektrum bis ca.
1.000 Hz auf. Die gewählte Abtastrate von 2.500 Hz
scheint hier ebenfalls ausreichend zu sein.
Ebenso wurde auch in den übrigen betrachteten
Sensordaten kein Hinweis auf Aliasing gefunden, Bild 4: Synchronisation zweier Signale. Die schwarzen und
sodass die gewählten Abtastraten insgesamt als blauen Pfeilspitzen markieren die Abtastzeitpunkte zwei-
ausreichend angesehen werden können. Allerdings er Signale. Die korrespondierenden Messungen dürfen
nicht weiter als ein halbes Abtastintervall voneinander
muss hierbei eingeschränkt werden, dass nur ein abweichen, damit eine eindeutige Zuordnung erfolgen
kleiner zeitlicher Ausschnitt der Daten untersucht kann.14
3.2.3 Anforderungen an die Datenqualität schon vor Installation der Sensoren im Labor cha-
rakterisiert wurde, kann sie daher nur durch anbrin-
Die Qualität von Sensormessungen wird durch ver- gen zusätzlicher, redundanter Sensoren erkannt
schiedene, sich überlagernde stochastische Pro- werden. Für eine quantitative Kompensation wer-
zesse beeinflusst. Die für die Untersuchung von den in jedem Fall redundante Messungen benötigt.
Zeitgebern entwickelte Allen-Varianz-Analyse bietet
eine Möglichkeit, verschiedene Störeinflüsse an- Ein weiteres wichtiges Merkmal für die Qualität
hand von aus langen Zeitreihen bestimmten Kurven von Sensordaten ist das Signal-Rauschverhältnis
grafisch zu ermitteln. Für die Charakterisierung von (Engl.: Signal-to-noise ratio (SNR)). Hierbei wird
Beschleunigungssensoren wird dies in [17] be- ebenfalls davon ausgegangen, dass das zu unter-
schrieben. suchende Signal aus einer additiven Überlagerung
des eigentlichen Nutzsignals mit einem störenden
Dabei wird davon ausgegangen, dass die Sensor-
weißen Rauschsignal besteht. Nullpunktfehler wer-
messungen die folgende Form haben:
den allerdings vernachlässigt.
= st + b t + n t (2)
Dann kann ein sogenannter Optimalfilter (Engl.:
Hier ist der verfälschte, aufgezeichnete Mess- matched filter) definiert werden, für den das Signal-
wert, st der unbekannte, wahre Wert und bt, nt sind Rausch-Verhältnis maximal ist [18]. Das Signal-
Störterme. Der Störterm nt beinhaltet zeitlich un- Rausch-Verhältnis ρ nimmt dann den folgenden
korreliertes, normalverteiltes Rauschen mit Stan- Wert an:
dardabweichung σt, während bt einen sich langsam
mit der Zeit verändernden Nullpunktfehler (Bias)
(3)
beschreibt.
Erste Schätzungen für bt und σt können durch die
Hier ist Ef die Energie des zu detektierenden Sig-
Berechnung von Mittelwert und Varianz einer aus-
nals, die durch Integration über dessen Fourier-
reichend langen Messreihe bei konstantem und be-
Spektrum bestimmt wird, und die spektrale
kannten Eingangssignal st (meist das Nullsignal) er-
Leistungsdichte des weißen Rauschens. Damit ist
halten werden. Dabei wird die langsame Verände-
ein Kriterium für die Detektion von Ereignissen in
rung des Bias allerdings vernachlässigt. Um diese
den aufgezeichneten Sensordaten gegeben.
Biasdrift ebenfalls charakterisieren zu können, wer-
den lange Zeitreihen, bei denen der Sensor in Ruhe
ist, benötigt. Solche Messreihen können normaler-
weise nur unter Laborbedingungen aufgenommen
werden.
4 Plausibilisierung Mess
system und Sensordaten
Für die Verwendung der Messdaten in Algorithmen
zur Sensordatenfusion und Anomalieerkennung ist
fusion
vor allem wichtig, dass sich die Charakteristik der 4.1 Einleitung
Störterme nicht unvorhergesehen mit der Zeit än-
dert. Beispielsweise ist es möglich, zeitlich verän- Ziel der Plausibilisierung ist es, Sensormessungen
derliches Rauschen zu modellieren. Wenn dies je- daraufhin zu überprüfen, ob ihre Werte nachvoll-
doch unterlassen wird, wird wahrscheinlich eine ziehbar sind. Es geht also darum, grobe Fehler oder
Anomalie erkannt, sobald sich beispielsweise die unmögliche Messwerte zu identifizieren. Ziel der
Varianz des Rauschens zu stark von ihrem Wert Sensordatenfusion ist hingegen die Verbesserung
während der Trainingsphase unterscheidet. Proble- der Genauigkeit durch optimale Kombination der In-
matisch sind in diesem Zusammenhang vor allem formationen aus unterschiedlichen Datenquellen.
langsame Veränderungen, wie z. B. die Biasdrift, Die Kombination unterschiedlicher Datenquellen
weil diese in Trainingsdaten, die sich über ver- bei der Sensordatenfusion erlaubt zudem die Ablei-
gleichsweise kurze Zeitabschnitte erstrecken, keine tung neuer Größen, die mit den Messungen einzel-
Rolle spielen und außerhalb des Labors nicht von ner Sensoren nicht bestimmbar wären. Diese bei-
tatsächlichen langsamen Veränderungen, z. B. auf- den Problemstellungen sind eng miteinander ver-
grund von Veränderungen der Statik von Gebäu- knüpft: Algorithmen zur Sensordatenfusion berech-
den, unterscheiden lassen. Wenn die Biasdrift nicht nen oftmals auch Genauigkeitsmaße, die als Güte-15
kriterium bei der Plausibilisierung verwendet wer- 4.2 Beschreibung der eingesetzten
den können. Ein Beispiel hierfür sind die Kovarianz- Verfahren
matrizen, die die Genauigkeit der Schätzung eines
Kalman-Filters beschreiben. Weiterhin ist die Mög- 4.2.1 Verfahren zur Filterung und Glättung
lichkeit, verschiedene Messgrößen mit Sensorda- von Daten
tenfusion zusammenzuführen, für die Plausibilisie-
4.2.1.1 Smoothing Splines
rung zusammenhängender physikalischer Größen
von Bedeutung ist. Smoothing Splines [22], [23] sind ein Beispiel für
eine Methode zur modellfreien Plausibilisierung, die
Die Ansätze zur Sensordatenfusion und Plausibili-
sich auf Annahmen zur Dynamik eines Systems
sierung unterscheiden sich auch darin, inwiefern sie
stützt. Ein Smoothing Spline ist eine stückweise po-
ein genaues physikalisch-mathematisches Modell
lynomiale Funktion, die bestimmte Stetigkeitseigen-
der untersuchten Vorgänge voraussetzen. Ansätze,
schaften hat1, und folgenden Fehlerterm minimiert:
für die kein solches Modell erstellt werden muss,
werden im Folgenden als modellfrei bezeichnet.
Diese bieten sich besonders für die Plausibilisie- (4)
rung einzelner physikalischer Größen an, da hier
die Zusammenhänge zwischen verschiedenen phy-
In obiger Formel bezeichnet s(t) den Smoothing
sikalischen Größen keine Rolle spielen und daher
Spline, der die Messwerte yk zu den Zeitpunkten tk
auch nicht modelliert werden müssen. Trotzdem lie-
approximiert. Der erste Term bestraft Abweichun-
gen modellfreien Methoden in diesem Sinne in der
gen von einem geraden Funktionsverlauf, während
Regel bestimmte Annahmen zu Grunde, beispiels-
die Summe im zweiten Term Abweichungen zwi-
weise, dass sich ein Messwert nur langsam verän-
schen dem Smoothing Spline und den Messwerten
dert, oder dass ein Messwert innerhalb bestimmter
bestraft. Über den Parameter α werden diese bei-
Grenzen liegen muss. Diese Annahmen folgen oft
den Strafterme gegeneinander gewichtet. Die oben
aus einem groben physikalischen Verständnis der
angesprochene Annahme über die Dynamik des
Vorgänge, benötigen aber keine genaue mathema-
Systems findet hier also über die Wahl eines geeig-
tische Modellbildung. Beispielsweise folgt die An-
neten α Eingang in die Plausibilitätsprüfung.
nahme, dass sich ein Messwert nur langsam verän-
dert, aus Vorwissen über die Dynamik eines Sys-
tems. 4.2.1.2 KalmanFilter
Im Gegensatz hierzu bieten modellbasierte Metho- An dieser Stelle wird zunächst die Funktionsweise
den die Möglichkeit, das Hintergrundwissen über des herkömmlichen Kalman-Filters beschrieben,
die physikalischen Abläufe in dem untersuchten vgl. [24]. Dieser spielt eine wichtige Rolle bei Ver-
System zur Verbesserung der Schätz- und Plausi- fahren zur Sensordatenfusion und bei der Plausibi-
bilisierungsergebnisse einzusetzen. Allerdings be- lisierung von Sensormessungen. Zudem ist ein Ver-
steht hier auch in größerem Maße die Gefahr der ständnis des Kalman-Filters auch für das Verständ-
systematischen Verzerrung der Ergebnisse, wenn nis des Outlier Robust Kalman-Filters in Kapitel
das Modell die physikalischen Gegebenheiten nicht 4.2.1.3 hilfreich.
gut beschreibt. Dies kann beispielsweise auftreten,
Bild 5 zeigt eine grafische Darstellung der Annah-
wenn sich die Umgebungsbedingungen mit der Zeit
men über den modellierten Prozess, die dem Kal-
verändern.
man-Filter zugrunde liegen. Dabei handelt es sich
In Kapitel 4.2 werden Verfahren zur Plausibilisie- um ein sogenanntes Bayes-Netz [25]. Die kreis-
rung vorgestellt. Die unterschiedliche Funktionswei- förmigen Knoten in einem solchen Netz repräsen-
se dieser Verfahren und ihre jeweiligen Stärken und tieren Zufallsvariablen und Pfeile repräsentieren
Schwächen werden in Kapitel 4.3 und Kapitel 4.4 stochastische Abhängigkeiten. Bei den Zufallsvaria-
am Beispiel der Plausibilisierung von Temperatur- blen kann es sich auch um mehrdimensionale Zu-
messungen dargestellt. Hierfür wurden Temperatur- fallsvektoren handeln. Die eckigen Kästchen ste-
daten gewählt, weil für die Modellierung des Wär-
metransports in Gebäuden bereits Modelle existie-
ren, anhand derer die Vorgehensweise gut erläutert
1
werden kann. Meist wird C2-Stetigkeit garantiert.16
enthält, wenn die Werte der Zufallsvariablen aus
den Elternknoten festgehalten werden.
Des Weiteren können die stochastischen Unabhän-
gigkeitsbeziehungen zwischen Zufallsvariablen un-
ter Zuhilfenahme einiger einfacher Regeln mithilfe
eines Bayes-Netzes bestimmt werden. Für das
Netz aus Bild 5 folgt daraus, dass jeder Zustand xt
nur von seinem Vorgängerzustand xt–1 abhängt.
Diese Markov-Annahme ist somit auch eine der Vo-
raussetzungen für das Kalman-Filter.
Weiterhin wird bei dem Kalman-Filter von normal-
verteilten Zufallsvariablen und linearen Abhängig-
Bild 5: Bayes-Netz zu dem generativen Modell, das die dem
keiten für das System- und Messmodell ausgegan-
Kalman-Filter zugrundeliegenden Annahmen über den gen. Das Netz in Bild 5 repräsentiert daher eine
beobachteten Prozess beschreibt. Wahrscheinlichkeitsdichte mit folgenden Faktoren:
hen für Steuergrößen, die als Eingabe für den Pro- (5)
zess dienen. Diese werden in der Regel nicht als
(6)
Zufallsvariablen aufgefasst.
In Bild 5 stehen die mit xt bezeichneten Zufallsvari- In obigen Gleichungen steht N(x,P) für die Normal-
ablen für den aktuellen Systemzustand zum Zeit- verteilung mit Mittelwert x und Kovarianzmatrix P
punkt t. Dieser könnte beispielsweise aus Tempera- und ~ bedeutet „verteilt wie“.
tur und Luftfeuchte sowie deren zeitlichen Ableitun-
Die Matrizen A, B und H, die das Zustandsüber-
gen bestehen, um die Dynamik auf einfache Weise
gangs- und Messmodell beschreiben, können sich
zu modellieren. Sensormessungen oder Beobach-
mit der Zeit ändern, die durch sie beschriebenen
tungen werden in Bild 5 durch kreisförmige Knoten
Zusammenhänge müssen jedoch näherungsweise
mit dicken hellblauen Rändern dargestellt und mit
linear sein. Eine häufig verwendete Variante des
zt bezeichnet. Kalman-Filters ist das sogenannte Extended Kal-
Bei dieser Modellierung werden die Messungen man-Filter, bei dem die Matrizen für Zustandsüber-
bzw. Beobachtungen strikt von dem eigentlichen gangs- und Messmodell durch die Jakobimatrizen
Zustand, der die Beobachtungen erzeugt und oft beliebiger analytischer Zustandsübergangs- und
das eigentliche Ziel einer Schätzung ist, unterschie- Messgleichungen ersetzt werden. Dabei handelt es
den. Der Zustand kann nicht direkt beobachtet wer- sich jedoch um eine Approximation, die mit zuneh-
den, es handelt sich um eine latente Variable, deren mender nicht-Linearität schnell zu unbrauchbaren
Schätzwert teilweise erst nach mehreren Zeit- Schätzergebnissen führt.
schritten aus den Beobachtungen bestimmt werden
Treffen die hier beschriebenen Voraussetzungen
kann. Dabei hilft neben dem Messmodell auch das
zu, dann bietet das Kalman-Filter eine effizien-
zeitliche Modell, das die Dynamik des untersuchten
te Methode zur Berechnung des bestmöglichen
Prozesses beschreibt.
Schätzwertes aus den Beobachtungen z1, z2, z3,
Aus einem Bayes-Netz kann die Wahrscheinlich- …, zt bis zum Zeitpunkt t. Hierfür wird der geschätz-
keitsdichte über die beteiligten Zufallsvariablen di- te Zustand und dessen Kovarianz zunächst gemäß
rekt abgelesen werden. Jeder Wurzelknoten ohne dem Zustandsübergangsmodell aus Gleichung (5)
eingehenden Pfeil trägt einen Faktor p(x) zu der in der Zeit fortgeschrieben:
gemeinsamen Dichtefunktion bei, der die Rand- (7)
verteilung über die in dem Knoten enthaltene Zu-
fallsvariable x enthält. Für jeden Knoten mit ein- (8)
gehendem Pfeil wird ein Faktor p(x|Eltern(x)) zu
der Wahrscheinlichkeitsdichtefunktion hinzugefügt, Hierbei kennzeichnen die hochgestellten Zeichen
der die bedingte Wahrscheinlichkeitsdichte für x +, – die Schätzungen für den Zustand xt und des-17
sen Kovarianz Pt vor bzw. nach der Verarbeitung
einer Messung. Die Prädiktion wird dann verwen-
det, um das Residuum st und dessen Kovarianzma-
trix S zu bestimmen:
(9)
(10)
Damit kann schließlich der neue Filterzustand unter
Berücksichtigung der Messung berechnet werden:
(11)
(12)
Bild 6: Bayes-Netz zu dem generativen Modell, das die dem
(13) Outlier Robust Kalman-Filter zugrundeliegenden Annah-
men über den beobachteten Prozess beschreibt.
Den optimalen Schätzwert für xt erhält man nun
durch abwechselnde Ausführung der Gleichungen zt von weiteren Knoten Rt abhängen. Diese enthal-
(7)-(8) für die Prädiktion und (9)-(13) für die Aktuali- ten die Parameter der Verteilung des Messrau-
sierung mit neuen Messungen. schens.
Die Residuen und ihre Kovarianz aus den Gleichun- Hierbei wird für das Messrauschen selbst eine mit-
gen (9) und (10) sind für die Erkennung von Ausrei- telwertfreie Normalverteilung mit Kovarianzmatrix
ßern in den Messwerten von großer Bedeutung und Mt angenommen. Diese Kovarianzmatrix wird aller-
können somit auch für die Plausibilisierung verwen- dings ebenfalls als Zufallsvariable aufgefasst, de-
det werden. ren Inverse Wishart-verteilt ist:
4.2.1.3 Outlier Robust KalmanFilter (14)
Das Outlier Robust Kalman-Filter (ORKF) ist eine
Variante des Kalman-Filters, die besonders robust Hierbei steht W(X, f) für eine Wishart-Verteilung mit
gegenüber Ausreißern in den Messdaten ist [26]. Präzisionsmatrix X und f Freiheitsgraden. Der Pa-
Bei dem herkömmlichen Kalman-Filter wird ange- rameter ρ bestimmt, wie stark die Verteilung der
nommen, dass das Messrauschen normalverteilt ist Kovarianzmatrizen um ihren Mittelwert schwankt.
und dass sich die Parameter dieser Verteilung nicht
ändern. Im Gegensatz hierzu wird bei dem ORKF Falls der latente Zustand xt bekannt ist, sind die Be-
von einer Student-t Verteilung der Messfehler aus- obachtungen zt Student-t-verteilt. Die a-posteriori
gegangen. Diese Verteilung misst groben Ausrei- Wahrscheinlichkeit ρ(xt|zt, zt-1, …, z1) ist bei exak-
ßern mehr Wahrscheinlichkeit bei und soll so eine ter Rechnung nach diesem Modell nicht mehr nor-
separate Behandlung von Ausreißern überflüssig malverteilt, wodurch eine effiziente rekursive Be-
machen. Hierfür wird bei jeder Filteraktualisierung rechnung erschwert wird. Daher verwenden die Au-
eine Fixpunktiteration durchgeführt, um eine an das toren in [26] eine möglichst optimale Approximation
aktuelle Residuum angepasste Kovarianzmatrix für der wahren a-posteriori Verteilung durch eine Nor-
das Messrauschen zu bestimmen, mit der dann malverteilung. Die Optimalität wird hierbei durch Mi-
eine Filteraktualisierung ganz analog zu dem nimierung der Kullback-Leibler Distanz zwischen
herkömmlichen Kalman-Filter durchgeführt werden der analytisch korrekten a-posteriori Dichte und ih-
kann. rer Approximation erreicht. Bei der Kullback-Leibler
Distanz handelt es sich dabei um eine Metrik auf
Bild 6 zeigt das Bayes-Netz, das der Modellierung dem Raum der Wahrscheinlichkeitsdichten.
des ORKF zugrunde liegt. Das Netz ähnelt dem
entsprechenden Bayes-Netz für das Kalman-Filter Für die Berechnung der approximierten a-posteriori
aus Bild 5 stark. Der wesentliche Unterschied be- Verteilung wird der Erwartungswert Γt = E[Mt] der
steht darin, dass die Knoten für die Beobachtungen Kovarianzmatrix des Messrauschens benötigt. InSie können auch lesen