HG S-57652ZD GNSS Positioniersystem - Götting KG
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Systembeschreibung HG S-57652ZD
Satellitennavigation
GNSS Positioniersystem
HG S-57652ZD
Positionierung von Kranen mit Hilfe von RTK DGNSS
mit der Control Unit HG G-61430YD
Deutsch, Revision 08 Stand: 05.05.2021 Entw. von: LM Autor(en): RAD/LM/AF
Führung durch Innovation www.goetting.de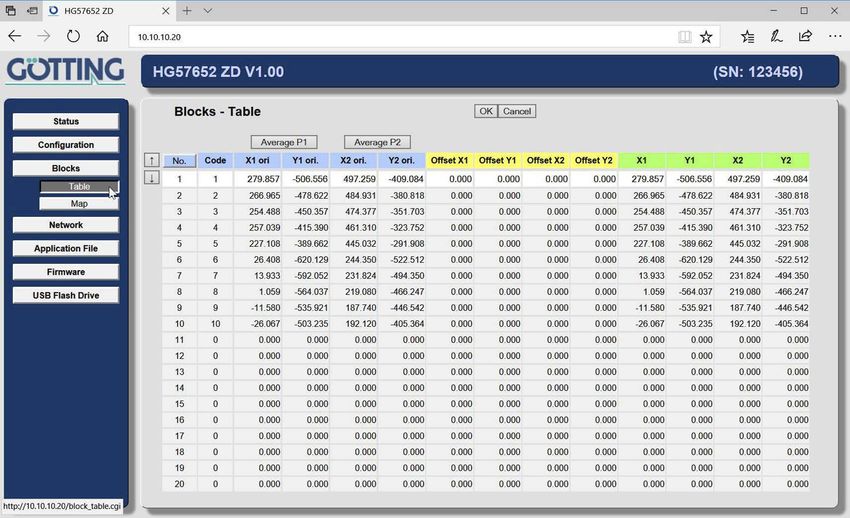
2 Übersicht
Übersicht
Merkmale des Systems HG S-57652ZD:
• RTG Positionierung/Autosteering oder • Benutzerfreundliches und komfortab-
Container Tracking mit Global Naviga- les Web Interface über Ethernet
tion Satellite Systems (GNSS) – alle Web Browser werden unter-
• RTK DGNSS nach dem Stand der Tech- stützt
nik – alle Betriebssysteme
– Positionsgenauigkeit besser als – Nutzung aus der Ferne möglich
±2 cm mit 20 Hz Updaterate
• Schnittstellen zu SPS/Fahrzeugsteue-
– Winkelgenauigkeit ~ 0.1° bei 2 m rung
Antennenabstand und 20 Hz
– CAN Schnittstelle
• Bis zu 255 Blöcke für Autosteering /
– Ethernet Schnittstelle
Container Tracking
– RS 232 Schnittstelle (optional)
– PROFINET Schnittstelle (optional
über das Erweiterungsmodul HG G-
61432ZA)
© 2021 Götting KG, Irrtümer und Änderungen vorbehalten.
Die Götting KG in D-31275 Lehrte besitzt
ein zertifiziertes Qualitätssicherungssystem
gemäß ISO 9001.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021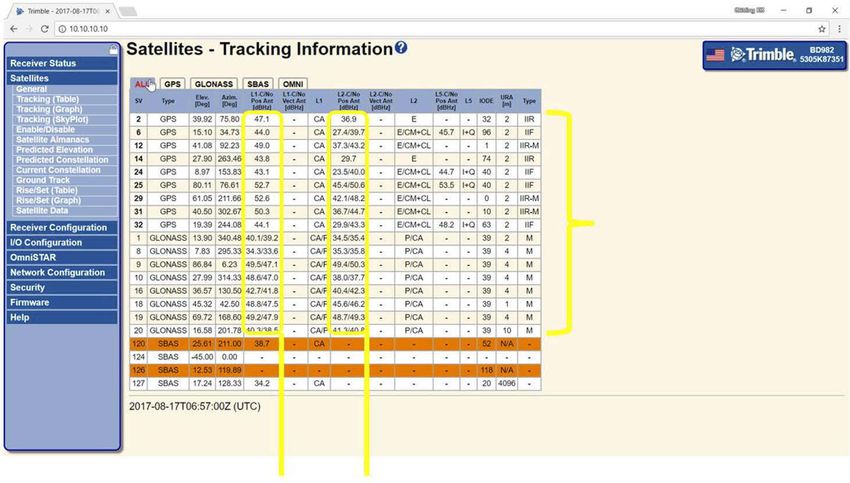
Inhaltsverzeichnis 3 Inhalt 1 Zu diesem Dokument ........................................................................ 6 2 Einleitung .......................................................................................... 7 2.1 Systemkomponenten ........................................................................................................... 7 2.2 Eingesetzte Technologien .................................................................................................. 9 2.2.1 Eigenständiges GNSS...................................................................................................... 9 2.2.2 Differentielles GNSS (DGNSS)...................................................................................... 9 2.2.3 Kinematisches DGNSS in Echtzeit .............................................................................. 9 2.2.4 Voraussetzungen für den Betrieb .............................................................................. 10 2.3 Funktionen des Systems................................................................................................... 10 2.3.1 Container-Verfolgung .................................................................................................... 10 2.3.2 RTG Autosteering ........................................................................................................... 10 3 Control Unit HG G-61430YD........................................................... 11 3.1 Gerätevarianten ................................................................................................................... 11 3.2 Montage ................................................................................................................................. 12 3.3 Frontplatte ............................................................................................................................ 12 3.4 Bedienelemente auf der Frontseite............................................................................... 12 3.5 Anzeigeelemente auf der Frontseite............................................................................. 13 3.6 Steckverbinder..................................................................................................................... 14 3.6.1 ETH...................................................................................................................................... 14 3.6.2 USB ..................................................................................................................................... 14 3.6.3 SIO 1 (GNSS Receiver).................................................................................................. 14 3.6.4 SIO 2 ................................................................................................................................... 15 3.6.5 CAN 1 ................................................................................................................................. 15 3.6.6 CAN 2 ................................................................................................................................. 15 3.6.7 SIO 3 ................................................................................................................................... 16 3.6.8 POWER .............................................................................................................................. 16 3.6.9 IO ......................................................................................................................................... 16 3.6.10 ENCODER 1 / ENCODER 2 .......................................................................................... 16 3.6.11 PROG ..................................................................................................................................17 3.6.12 ANT1 / ANT2 .................................................................................................................... 17 3.7 Erweiterungsmodul Feldbus............................................................................................ 17 4 Montage / Verkabelung .................................................................. 18 4.1 Systemkomponenten / Verkabelung............................................................................. 18 4.1.1 Referenzstation ............................................................................................................... 18 4.1.2 Rover ..................................................................................................................................20 4.2 Montage der Control Unit................................................................................................. 21 4.3 Anschlüsse zur Control Unit ............................................................................................ 21 4.3.1 Referenzstation ............................................................................................................... 21 4.3.2 Rover ..................................................................................................................................21 4.4 Verbindungen zum SATEL Funkmodem HW DEV00101 ........................................ 22 4.4.1 Referenzstation ............................................................................................................... 22 4.4.2 Rover ..................................................................................................................................22 4.5 Verbindungen zu USV und Batterie (nur Referenzstation) .................................... 23 4.6 Antennen ............................................................................................................................... 23 5 Software / Konfiguration................................................................ 27 5.1 Konfiguration der Control Unit ....................................................................................... 27 5.1.1 Startbildschirm ................................................................................................................ 28 5.1.2 Login / Passworteingabe.............................................................................................. 28 5.1.3 Status ................................................................................................................................. 29 5.1.3.1 Status – Main .............................................................................................................. 29 5.1.3.2 Status – GNSS............................................................................................................. 31 5.1.3.3 Status – TCP ................................................................................................................ 33 Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021
4 Inhaltsverzeichnis
5.1.3.4 Status – Errors.............................................................................................................34
5.1.4 Konfiguration ...................................................................................................................35
5.1.4.1 Configuration – General ...........................................................................................36
5.1.4.2 Configuration – Load Compensation ...................................................................38
5.1.4.3 Configuration – GNSS ...............................................................................................39
5.1.4.4 Configuration – Reset ...............................................................................................40
5.1.5 Blocks .................................................................................................................................41
5.1.5.1 Blocks – Table .............................................................................................................41
5.1.5.2 Blocks – Map ...............................................................................................................42
5.1.6 Network .............................................................................................................................43
5.1.7 Application File ................................................................................................................43
5.1.8 Firmware Update ............................................................................................................44
5.1.9 USB Flash Drive...............................................................................................................45
5.2 Konfiguration des GNSS Empfängers ...........................................................................45
5.2.1 Referenzstation ...............................................................................................................46
5.2.2 Rover...................................................................................................................................50
5.3 Konfigurierung des Funkmodems (Referenzstation & Rover) ...............................52
5.3.1 Power-Up / Einschalt- Verhalten ...............................................................................52
5.3.2 Ändern der Einstellungen .............................................................................................53
5.3.3 Speichern der geänderten Einstellungen ................................................................53
5.3.4 Beispiel — Änderung der Funkfrequenz ..................................................................54
5.3.5 Liste der Einstellwerte ..................................................................................................54
5.4 Überprüfung der GNSS-Signalqualität (Referenzstation & Rover) ......................55
5.5 Verifizierung der GNSS-Positionslösung (Rover) ......................................................56
6 USB Datenaufzeichnung (Logging) ................................................ 57
7 Kommunikation mit der übergeordneten Steuerungseinheit ......58
7.1 CAN Kommunikation..........................................................................................................58
7.1.1 Konfigurationssätze CFG_1, CFG_2, CFG_3 und CFG_4 ...................................58
7.1.2 Konfigurationssätze CFG_1 & CFG_2 ......................................................................58
7.1.2.1 GNSS Control Unit –> Kransteuerung (CFG_1 & CFG_2) ..............................58
7.1.2.1.1 CAN Identifier 192 hex / 402 dec, Länge: 8 Byte.........................................58
7.1.2.1.2 CAN Identifier 193 hex / 403 dec, Länge: 8 Byte.........................................59
7.1.2.2 GNSS Control Unit –> Kransteuerung (nur CFG_2) .........................................59
7.1.2.2.1 CAN Identifier 194 hex / 404 dec, Länge: 5 Byte.........................................59
7.1.2.2.2 CAN Identifier 195 hex / 405 dec, Länge: 8 Byte.........................................60
7.1.2.2.3 CAN Identifier 196 hex / 406 dec, Länge: 6 Byte.........................................60
7.1.2.2.4 CAN Identifier 197 hex / 407 dec, Länge: 8 Byte.........................................60
7.1.2.3 Kransteuerung –> GNSS Control Unit (CFG_1 & CFG_2) ..............................61
7.1.2.3.1 CAN Identifier 181 hex / 385 dez, Länge: 8 Byte .........................................61
7.1.2.3.2 CAN Identifier 182 hex / 386 dez, Länge: 2 Byte .........................................61
7.1.3 Konfigurationssätze CFG_3 & CFG_4 .....................................................................61
7.1.3.1 GNSS Control Unit –> Kransteuerung (CFG_3 & CFG_4) ..............................61
7.1.3.1.1 CAN Identifier 192 hex / 402 dec, Länge: 8 Byte.........................................61
7.1.3.1.2 CAN Identifier 193 hex / 403 dec, Länge: 8 Byte.........................................62
7.1.3.2 GNSS Control Unit –> Crane Controller (CFG_4 only) ....................................62
7.1.3.3 Crane Controller –> GNSS Control Unit (CFG_3 & CFG_4) ...........................62
7.1.3.3.1 CAN Identifier 181 hex / 385 dez, Länge: 8 Byte .........................................62
7.2 Ethernet/UDP Kommunikation & PROFINET Kommunikation ..............................63
7.2.1 GNSS Control Unit –> Kransteuerung (CFG_1 & CFG_2)...................................63
7.2.2 Kransteuerung –> GNSS Control Unit (CFG_1 & CFG_2)...................................64
7.3 Erläuterungen .......................................................................................................................64
7.3.1 Status Control Unit .........................................................................................................64
7.3.2 Qualität Parameter GNSS -Position ..........................................................................65
7.3.3 Spreader Status...............................................................................................................65
7.3.4 Status Kransteuerung / Controller.............................................................................66
8 Inbetriebnahme ...............................................................................67
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021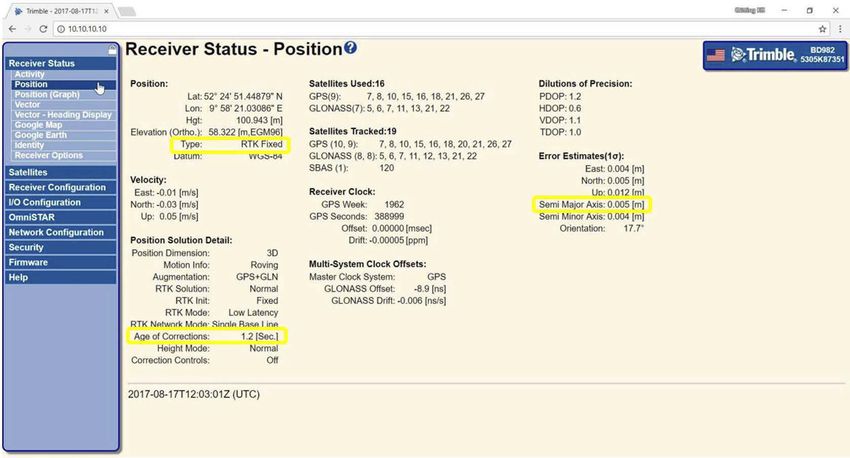
Inhaltsverzeichnis 5
8.1 Referenzstation ................................................................................................................... 67
8.2 Rover....................................................................................................................................... 68
9 Fehlersuche ..................................................................................... 69
10 Wartung ........................................................................................... 70
11 Technische Daten ........................................................................... 71
11.1 Control Unit .......................................................................................................................... 71
11.2 GNSS Antenne ..................................................................................................................... 71
11.3 RF Antennen ......................................................................................................................... 72
11.4 Antennenkabel ..................................................................................................................... 72
12 Anhang ............................................................................................ 73
12.1 Algorithmus für die automatische Lenkung (Automatic Steering) ...................... 73
12.2 Firmware-Update über die USB-Schnittstelle ........................................................... 75
12.3 Migration HG G-61430ZA/ZB —> HG G-61430YD.................................................... 78
12.3.1 Bereits bestehende Anlage mit Control Unit HG G-61430ZA...........................78
12.3.2 Defekte Control Unit HG G-61430ZA ....................................................................... 78
12.3.3 Control Unit HG G-61430ZA muss ersetzt werden .............................................. 78
12.4 Bestehende Installation mit Control Unit HG G-61430ZB...................................... 79
12.4.1 Defekte Control Unit HG G-61430ZB ....................................................................... 79
12.4.2 Control Unit HG G-61430ZB muss ersetzt werden .............................................. 79
12.5 Abschließende Installation mit Control Unit HG G-61430YD................................ 80
12.6 Geänderte Leistungsmerkmale (neues Gerät im Vergleich zum abge-
kündigten Modell) ............................................................................................................... 80
12.7 Darstellung und Abmessungen ...................................................................................... 82
13 Abbildungsverzeichnis.................................................................... 83
14 Tabellenverzeichnis ........................................................................ 86
15 Stichwortverzeichnis ...................................................................... 88
16 Hinweise .......................................................................................... 90
16.1 Urheberrechte ......................................................................................................................90
16.2 Haftungsausschluss ........................................................................................................... 90
16.3 Markenzeichen und Firmennamen ................................................................................ 90
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021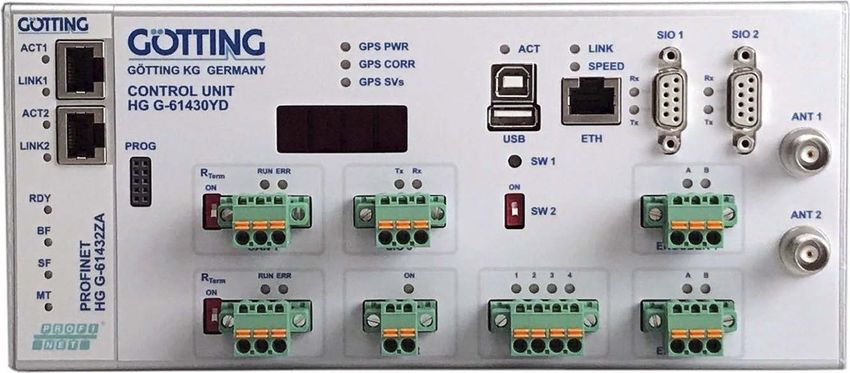
6 Kapitel 1 – Zu diesem Dokument
1 Zu diesem Dokument
In Dokumentationen der Götting KG werden folgende Symbole und Auszeichnun-
gen verwendet:
Weist auf technische Informationen hin, die bei der Bedienung des Gerätes beachtet
werden sollten.
ACHTUNG!
Weist auf Gefahren hin, die zu einer Zerstörung oder Beschädigung des Geräts füh-
ren können.
VORSICHT!
Weist auf Gefahren hin, die zu Körperverletzungen bzw. erheblichen Sachschäden
führen können.
WARNUNG!
Weist auf Gefahren hin, die zu Körperverletzungen, möglicherweise mit Todesfol-
ge, bzw. erheblichen Sachschäden führen können.
Tipp
Gibt Hilfestellungen, die den Umgang mit dem Gerät erleichtern.
Verweist auf weiterführende Informationen im Internet, z. B. auf unser Angebot
www.goetting.de. Diese lassen sich in der PDF-Version der Dokumentation direkt
anklicken.
Programmtexte und -variablen werden durch Verwendung einer Schriftart
mit fester Buchstabenbreite hervorgehoben.
Wenn für Eingaben bei der Bedienung von Programmen Tastenkombinationen
verwendet werden, dann werden dazu jeweils die benötigten asten ervor-
gehoben (bei den Programmen der Götting KG können üblicherweise große
und kleine Buchstaben gleichwertig verwendet werden).
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021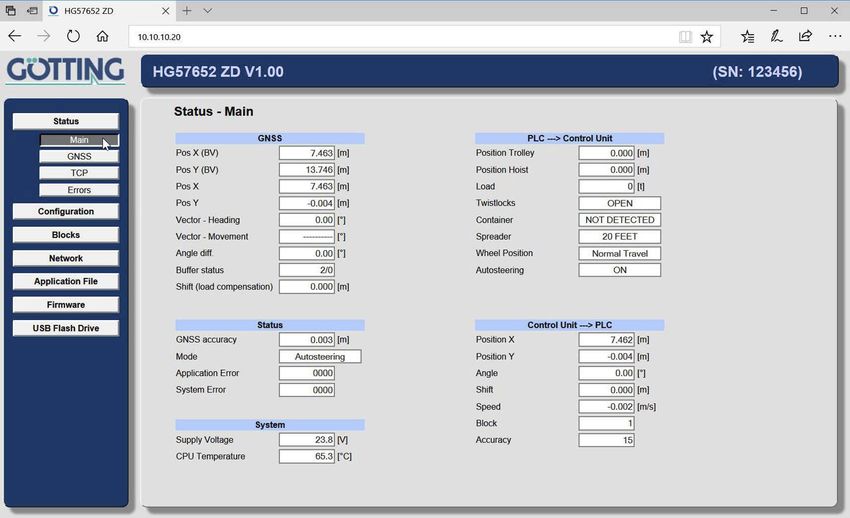
Einleitung – Kapitel 2 7
2 Einleitung
Gegenstand des in diesem Dokument beschriebenen Systems ist die millimeterge-
naue Positionsbestimmung von sich bewegenden Maschinen, insbesondere von
Containerkranen. Darüber hinaus können diese Maschinen mit dem hier beschrie-
benen System automatisch spurgeführt und die Position der Ladung kann präzise
bestimmt werden.
Zum Einsatz kommt ein GNSS-Empfänger der neuesten Generation. Abhängig von
seiner Konfiguration kann der Empfänger alle verfügbaren Satellitennavigationssys-
teme verarbeiten. Die Positionsberechnung erfolgt in Echtzeit. Mit einer zweiten
GNSS-Antenne kann der Empfänger auch den Winkel bestimmen.
Zusätzlich können 255 verschiedene gerade, virtuelle Spuren (Blöcke) im System
durch Programmierung des Anfangs- und Endpunktes jedes Blocks gespeichert
werden.
2.1 Systemkomponenten
Das Verfahren kann entweder für eine Referenzstation oder einen Rover verwendet
werden. Es gibt nur eine Referenzstation pro Anlage. Diese verfügt über einen hoch-
präzisen GNSS-Empfänger. Die GNSS-Antenne (z. B. auf dem Dach eines Gebäudes)
der Referenzstation wird als Nullpunkt eines anlage- und standortspezifischen Refe-
renzkoordinatensystems verwendet.
Bild 1 Referenzstation und Rover
Y
Referenzstation
Koordinatensystem Container
N
Stacks
Rover (Kräne)
X
Antenne Referenzstation
Das GNSS-System besteht aus mehreren Komponenten. Diese Komponenten sind
zum Teil projektspezifisch und variieren zwischen dem Einsatz Referenzstation oder
Rover.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021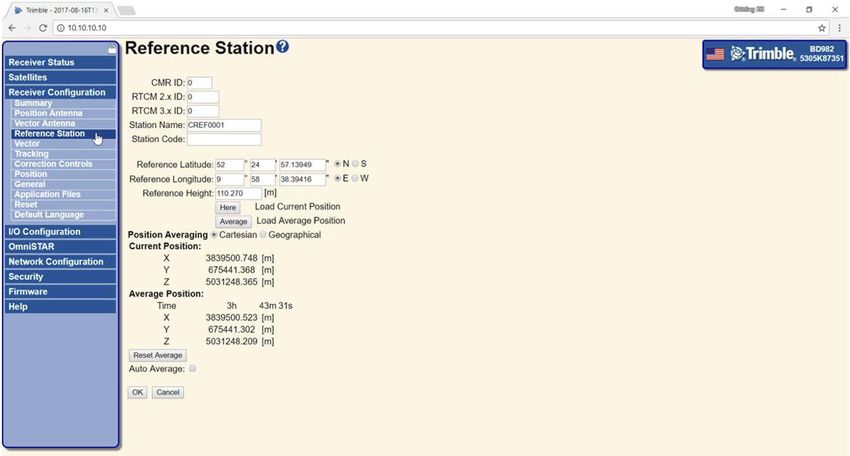
8 Kapitel 2 – Einleitung
Bild 2 Systemkomponenten: Referenzstation und Rover
REFERENZSTATION ROVER
RF-Antenne GNSS-Antenne RF-Antenne GNSS-Antennen
power
supply
24 V
USV + power
Funk Radio
Batt. supply
24 V
SIO1 POWER ANT1 SIO1 POWER ANT1 ANT2
ETHERNET
PROFINET Fahrzeug-
CAN1 steuerung
HG G-61430YD HG G-61430YD
Eine ausführlichere Komponentenübersicht, einschließlich der Verkabelung, gehen
Sie zu Abschnitt 4.1 auf Seite 18 .
Tabelle 1 Systemkomponenten
Bauteil Version Erläuterung
YD 001 GNSS Referenzstation
YD 002 GNSS Crane Positioning Rover/ GNNSS Kran-
Control Unit
Positionierung Rover
HG G-61430
YD 003 GNSS Crane Positionierung Rover/Referenzsta-
tion
HW ANT00044 GNSS Antenne
HW DEV00058 USV Referenzstation
HW DEV00059 USV Batterie Referenzstation
HW DEV00101 *) Funkmodem
HW ANT00007 *) RF Antenne Referenzstation
HW ANT00004 *) RF Antenne Rover
*) Projektspezifisch, die aufgeführten Komponenten werden in den meisten Pro-
jekten eingesetzt.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021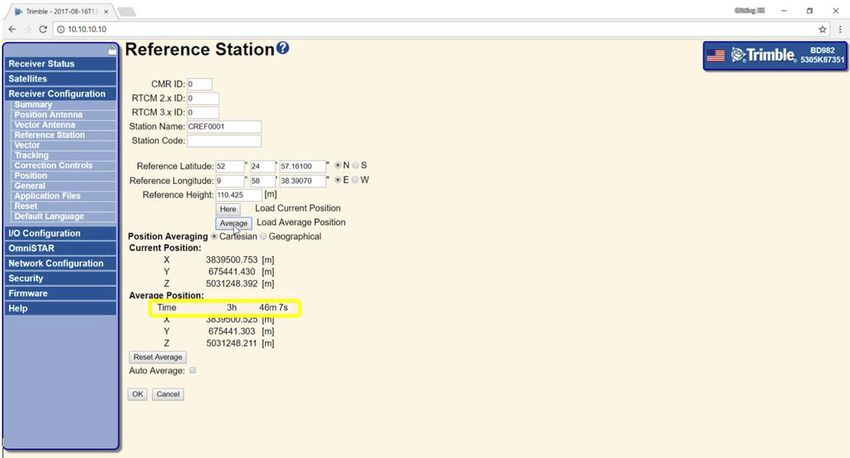
Einleitung – Kapitel 2 9
2.2 Eingesetzte Technologien
2.2.1 Eigenständiges GNSS
Mit dem universell einsetzbaren Global Navigation Satelliten System (GNSS) kann
eine geografische Position bestimmt werden. Das üblicherweise verwendete Stan-
dard-GNSS bietet eine Genauigkeit von ca. 10 m.
2.2.2 Differentielles GNSS (DGNSS)
Bild 3 DGNSS Struktur
GNSS Satelliten
= GNSS Antenne
min. 4 gleichzeitig sichtbar
= HF Antenne
Referenzstation
Korrekturdaten-
übertragung über
Funkmodem
Kräne (Rover)
Autosteering /
Container Tracking
Die standardmäßige GNSS-Genauigkeit reicht für das hier dargestellte System nicht
aus. Deshalb wird neben dem am Kran verbauten GNSS-System (mobile Einheit, Ro-
ver) ein weiteres stationäres GNSS-System (Referenzstation) installiert. Die Position
dieser Referenzstation kann genau berechnet werden. Das System kann so seine
tatsächliche Position mit der durch das Satellitensignal übermittelten aktuellen Po-
sition vergleichen und der daraus berechnete Fehlerfaktor wird über einen drahtlo-
sen Sender-Empfänger an die mobilen Einheiten übertragen. Diese können dann
ihre Positionen mit einer Genauigkeit von bis zu ±1 m berechnen (differentielles
GNSS; DGNSS).
2.2.3 Kinematisches DGNSS in Echtzeit
Durch zusätzliche Auswertung der Trägerphase des Satellitensignals – nach dem
ersten Start benötigt das System 60 Sekunden um Mehrdeutigkeiten auszuschlie-
ßen – können Real Time Kinematic (RTK) DGNSS- Empfänger die Genauigkeit der
Ausgangsposition auf ca. ±2 cm verbessern (RTK DGNSS). Zweifrequenz-GNSS
Empfänger nutzen beide Positionierungssignale, die von den Satelliten gesendet
werden, daher ist die Initialisierungszeit wesentlich kürzer als bei Einfrequenz-
GNSS-Empfängern.
Das GNSS-System ist über einen längeren Zeitverlauf sehr zuverlässig, aufgrund
von Abschattungen oder Reflexionen kann es allerdings zu kurzfristigen Ausfällen
kommen.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021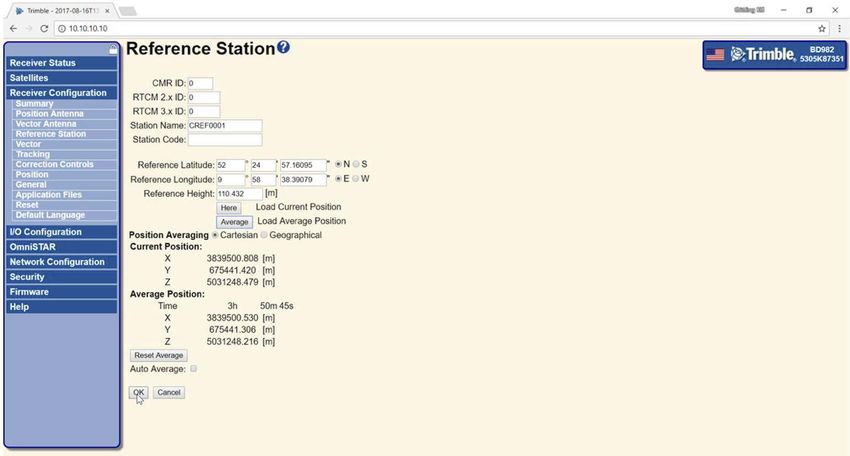
10 Kapitel 2 – Einleitung
2.2.4 Voraussetzungen für den Betrieb
Es muss unbedingt berücksichtigt werden, dass Hindernisse, die sich oberhalb des
Antennenhorizonts befinden, den Satellitenempfang grundsätzlich negativ beein-
flussen können. Infolge dieser Abschattungen und/oder Reflexionen kann sich die
Genauigkeit der GNSS- Antennen verringern. Sogar ein Totalausfall des GNSS ist
möglich. Daher ist es sinnvoll, die Götting KG bereits in die Projektierung mit einzu-
beziehen.
2.3 Funktionen des Systems
2.3.1 Container-Verfolgung
Die Zwischenlagerung von Containern mit Hilfe visueller Verfahren und Handbestä-
tigung führt zu einer Fehlerquote bei der Lagerverwaltung, die eine effiziente
Schiffsbe- und -entladung stark erschweren kann. Der Einsatz von GNSS bietet er-
hebliche Verbesserungen, um die Position von Containern auf einem Hafengelände
zu kontrollieren und zu dokumentieren.
Die seit Jahren für den Containertransport in Seehäfen verwendeten Rubber Tired
Gantry Cranes (RTG) melden über Datenfunk an das übergeordnete Container-Ma-
nagementsystem, wenn ein Container an einer bestimmten Lagerposition im Con-
tainerlager abgestellt und von dort wieder wegtransportiert wird. Dies führt sowohl
zur Entlastung des Kranführers, als auch zu einer Reduzierung der Fehlerquote, wo-
durch komplizierte und zeitaufwändige Containersuchen verhindert werden.
2.3.2 RTG Autosteering
Aufgrund der erreichbaren Genauigkeit der Positionsbestimmung von ca. ±2 cm ist
es möglich, die Bewegungen eines Fahrzeugs zu verfolgen. Mittels einer Reihe von
Messungen in Kombination mit den geographischen Positionsdaten sind somit auch
die Bewegungsrichtung sowie die Geschwindigkeit des Fahrzeugs bestimmbar.
Mit Hilfe dieser Funktionen kann ein RTG automatisch über eine vorgegebene Route
innerhalb eines Containerdepots gelenkt werden. Neben den Vorteilen der uneinge-
schränkten Beweglichkeit, die gummibereifte Fahrzeuge haben, können diese nun
auch wie Schienenfahrzeuge innerhalb des Containerlagers eingesetzt werden,
ohne die Aufmerksamkeit des Kranführers durch unnötige Anforderungen an die
Spurführung oder durch manuelle Lenkkorrekturen zu beeinträchtigen. Ein beson-
derer Vorteil dieses Systems besteht darin, dass für beide Funktionen keinerlei Ele-
mente innerhalb der Fahrbahnoberfläche des Containerlagers verbaut werden müs-
sen.
All diese Punkte dienen somit der Verbesserung der Betriebssicherheit – sie führen
zu einer Entlastung des Kranführers, die ihrerseits wiederum in einer Fehlervermei-
dung resultiert. Im Falle einer Störung oder während der Testphase stellt ein Ring-
speicher alle relevanten Zwischenergebnisse zur Verfügung, sodass eine schnelle
und einfache Fehlerdiagnose gewährleistet ist. Für Sonder- oder Notfalleinsätze sind
alle diese Funktionen auch manuell bedienbar, um eine vollständige Betriebsunter-
brechung zu vermeiden.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Control Unit HG G-61430YD – Kapitel 3 11
3 Control Unit HG G-61430YD
Die in diesem Kapitel dargestellte Control Unit (Steuergerät) beschreibt die Basis-
Hardwarekomponente zweier unterschiedlicher Systeme. Die Bezeichnung des
übergeordneten Systems richtet sich nach der im Gerät verwendeten Betriebssoft-
ware (Firmware). Die Control Unit ist mit unterschiedlichen Schnittstellen und An-
schlüssen für verschiedenste Systemkonfigurationen lieferbar.
3.1 Gerätevarianten
Die Control Unit ist in verschiedenen Versionen erhältlich.
Tabelle 2 Ausführungen der Control Unit HG G-61430YD
System / Geräte No.: HG G-61430
Firmware YD 001 YD 002 YD 003
HG S-57652 GNSS Referenzsta- GNSS Kranpositio- GNSS Kranpositio-
(dieses Sys- tion nierung Rover nierung Rover/Refe-
tem) renzstation
Die Control Unit ist in einer Basisausführung oder in einer Ausführung mit einem
Modul, das den Anschluss weiterer Bustypen ermöglicht, erhältlich (s. Abschnitt 3.7
auf Seite 17).
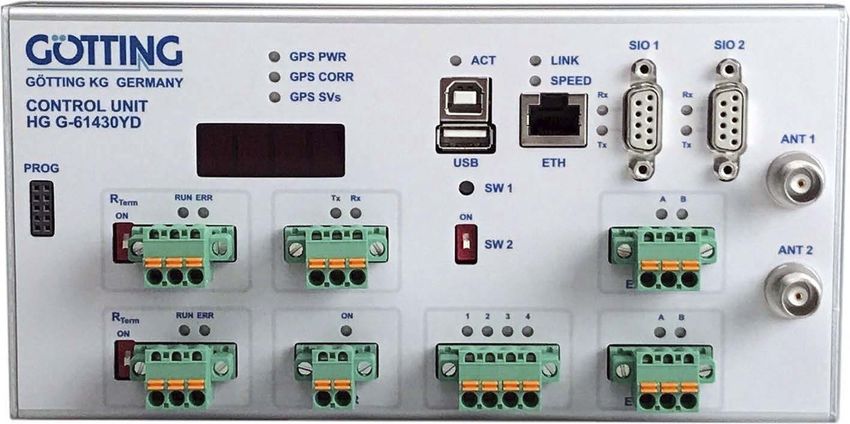
Bild 4 Foto der Control Unit: Basiskonfiguration mit GNSS und Version mit Feldbus / Profinet
Erweiterungsmodul HG G-61432ZA
Basiskonfiguration HG G-61430YD mit integriertem GNSS
Mit Erweiterungsmodul HG G-61432ZA für Profinet (Feldbus)
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202112 Kapitel 3 – Control Unit HG G-61430YD
3.2 Montage
Bild 5 Abmessungen der Control Unit Hardware HG G-61430YD
66 m m
49 m m 208 m m
105 m m
Die Control Unit ist zur Befestigung auf einer 35 mm Hutschiene nach EN50022 aus-
gelegt. Der Installationsort muss vor Feuchtigkeit geschützt werden. Für weitere
Komponenten der Fahrzeugsteuerung steht häufig ein Schaltschrank zur Verfügung.
3.3 Frontplatte
Bild 6 Control Unit: LEDs und Anschlüsse
3.4 Bedienelemente auf der Frontseite
Tabelle 3 Bedienelemente der Control Unit
Element Position Bedeutung
SW 1 Taste drü- Beenden Sie die Datenaufzeichung und entfernen
cken > 1 s Sie den USB-Stick. Sobald die LED ACT nicht mehr
blinkt, kann der Stick sicher abgezogen werden.
Taste drü- USB-Stick Formatierung (Achtung: Löscht alle
cken > 10 s Daten auf dem Stick ohne erneute Rückmel-
dung)
SW 2 EIN Firmware Update über USB-Schnittstelle, siehe
Anhang, Abschnitt 12.2 auf Seite 74
AUS Normalbetrieb der Steuereinheit
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Control Unit HG G-61430YD – Kapitel 3 13
Tabelle 3 Bedienelemente der Control Unit
Element Position Bedeutung
RTerm CAN 1 EIN 120 Ohm Abschlusswiderstand (Terminator) für CAN
1 aktiviert
AUS Kein interner Abschlusswiderstand für CAN 1
RTerm CAN 2 EIN 120 Ohm Abschlusswiderstand für CAN 2 aktiviert
AUS Kein interner Abschlusswiderstand für CAN 2
3.5 Anzeigeelemente auf der Frontseite
Tabelle 4 Anzeigeelemente
LED Bedeutung bei leuchtender / blinkender LED
Anzeige 7 Segment-Anzeige mit 4 Zeichen
POWER/An Stromversorgung
ETH/LINK Aktive Datenübertragung über Ethernet-Schnittstelle
ETH/SPEED – An –> Ethernet Übertragungsrate 100 Mbit/s
– Aus –> Ethernet Übertragungsrate 10 Mbit/s
USB/ACT Datenaufzeichnung aktiv
GPS PWR Stromversorgung GNSS Empfänger ok
GPS CORR Empfang von GNSS Korrekturdaten
GPS SVs Empfang von GNSS Satelliten
SIO 1/Rx SIO 1 Empfang von Daten
SIO 1/Tx SIO 1 Übertragung von Daten
SIO 2/Rx SIO 2 Empfang von Daten
SIO 2/Tx SIO 2 Übertragung von Daten
SIO 3/Tx SIO 3 Empfang von Daten
SIO 3/Rx SIO 3 Übertragung von Daten
CAN 1/RUN CAN Bus 1 OK
CAN 1/ERR CAN Bus 1 Fehler
CAN 2/RUN CAN Bus 2 OK
CAN 2/ERR CAN Bus 2 Fehler
ENCODER 1/A Inkrementalgeber 1 / Kanal A
ENCODER 1/B Inkrementalgeber 1 / Kanal B
ENCODER 2/A Inkrementalgeber 2 / Kanal A
ENCODER 2/B Inkrementalgeber 2 / Kanal B
IO/1 Eingang/Ausgang 1 Signal > programmierter Schwellenwert
IO/2 Eingang/Ausgang 2 Signal > programmierter Schwellenwert
IO/3 Eingang/Ausgang 3 Signal > programmierter Schwellenwert
IO/4 Eingang /Ausgang 4 Signal > programmierter Schwellenwert
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202114 Kapitel 3 – Control Unit HG G-61430YD
3.6 Steckverbinder
3.6.1 ETH
Bild 7 Skizze des Steckverbinders ETH
Funktion: Kommunikation mit übergeordneter Steuerung
und/oder PC
Schnittstelle: Ethernet
Steckertyp: RJ-45
3.6.2 USB
Bild 8 Skizze USB Stecker Typ A und Typ B
Funktion: Datenaufzeichnung auf USB-Stick (Typ A) oder
Firmware Update (Typ B, siehe Abschnitt 12.2 auf Seite 75 Typ B
im Anhang)
Schnittstelle: USB 1.1
Steckertyp: USB Typ A und B (wahlweise) Typ A
3.6.3 SIO 1 (GNSS Receiver)
Bild 9 Skizze des Steckverbinders SIO 1
Funktion: Kommunikation mit internem GNSS Empfänger
(optional)
5
9
Schnittstelle: RS 232 + Spannungsversorgung für externes 4
8
3
7
Funkmodem 6
2
1
Steckertyp: Sub-D 9 Pin (DE9) female
Tabelle 5 Pinbelegung SIO 1
Pin Funktion Richtung
1
2 TxD O
3 RxD I
4
5 GND O
6 +Ub (12-24 V) O
7
8
9
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Control Unit HG G-61430YD – Kapitel 3 15
3.6.4 SIO 2
Bild 10 Skizze des Steckverbinders SIO 2
Funktion: Konfiguration der Ethernet Schnittstelle
Schnittstelle: RS 232 9
5
4
8
Steckertyp: Sub-D 9 Pin (DE9) female 7
3
2
6
1
Tabelle 6 Pinbelegung SIO 2
Pin Funktion Richtung
1
2 TxD O
3 RxD I
4
5 GND
6
7
8
9
3.6.5 CAN 1
Bild 11 Skizze des Anschlusses CAN 1
Funktion: CAN Bus 1
Schnittstelle: CAN Spez. V2.0 Teil B
Steckertyp: Phoenix-Kontakt FKCT 2,5/3-STF-5,08
1 2 3
Tabelle 7 Pinbelegung SIO 2
Pin Funktion Richtung
1 GND
2 CAN High I/O
3 CAN Low I/O
3.6.6 CAN 2
Bild 12 Skizze des Anschlusses CAN 2
Funktion: CAN Bus 2
Schnittstelle: CAN Spez. V2.0 Teil B
Steckertyp: Phoenix-Kontakt FKCT 2,5/3-STF-5,08
1 2 3
Tabelle 8 Pinbelegung SIO 2
Pin Funktion Richtung
1 GND
2 CAN High I/O
3 CAN Low I/O
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202116 Kapitel 3 – Control Unit HG G-61430YD
3.6.7 SIO 3
Bild 13 Skizze des Anschlusses SIO 3
Funktion: Nicht benutzt
Schnittstelle: RS 232
Steckertyp: Phoenix-Kontakt FKCT 2,5/3-STF-5,08
1 2 3
Tabelle 9 Pinbelegung SIO 2
Pin Funktion Richtung
1 GND
2 TxD O
3 RxD I
3.6.8 POWER
Bild 14 Skizze des Anschlusses POWER
Funktion: Energieversorgung 12 – 24 V
Steckertyp: Phoenix-Kontakt FKCT 2,5/2-STF-5,08
Tabelle 10 Pinbelegung SIO 2 1 2
Pin Funktion Richtung
1 GND
2 +Ub (12 – 24 V) I
3.6.9 IO
Bild 15 Skizze des Steckverbinders IO
Funktion: Anschluss von Transponderantennen und
Not-Aus
Schnittstelle: Konfigurierbar, standardmäßig 3 Ein- 1 2 3 4
gänge (Schaltschwelle 0 - 24 V) und ein Ausgang 0
bis +Ub
Steckertyp: Phoenix-Kontakt FKCT 2,5/4-STF-5,08
Tabelle 11 Pinbelegung SIO 2
Pin Richtung Funktion
1 Eingang Transp.-Ant.
2 Eingang Transp.-Ant.
3 Eingang Transp.-Ant.
4 Ausgang Not-Aus
3.6.10 ENCODER 1 / ENCODER 2
Bild 16 Skizze der Anschlüsse ENCODER 1 / ENCODER 2
Funktion: Anschluss von Inkrementalgebern
Schnittstelle: Schaltschwelle 5 – 24 Volt (konfigu-
rierbar)
1 2 3
Steckertyp: Phoenix-Kontakt FKCT 2,5/3-STF-5,08
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Control Unit HG G-61430YD – Kapitel 3 17
Tabelle 12 Pinbelegung ENCODER 1 / ENCODER 2
Pin Funktion Richtung
1 GND
2 Kanal A I
3 Kanal B I
3.6.11 PROG
Bild 17 Skizze des Anschlusses PROG
ACHTUNG!
Nur für den internen Gebrauch durch Götting! Nicht anschließen!
3.6.12 ANT1 / ANT2
2 X TNC-Stecker für den Anschluss von GNSS Antennen (s. Bild 4 auf Seite 11)
3.7 Erweiterungsmodul Feldbus
Die Control Unit kann mit dem Zusatzmodul HG G-61432ZA bestellt werden, das
eine Profinet Schnittstelle hinzufügt.
Bild 18 Abmessungen Steuergerät inkl. Feldbus-Erweiterungsmodul HG G-61432ZA
66 m m 237 m m
49 m m 208 m m
ACT1
LINK1
ACT2
LINK2
105 m m
RDY
HG G-61432ZA
BF
PROFINET
SF
MT
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202118 Kapitel 4 – Montage / Verkabelung
4 Montage / Verkabelung
ACHTUNG!
Sämtliche Kabel und Geräte müssen sorgfältig verlegt und eingebaut werden! Ach-
ten Sie darauf, dass sie während des Montagevorgangs nicht beschädigt werden.
Beachten Sie die jeweiligen Krümmungsradien der Kabel, siehe Abschnitt 11.4 auf
Seite 72.
4.1 Systemkomponenten / Verkabelung
4.1.1 Referenzstation
Bild 19 Komponenten und Verkabelung Referenzstation
HF Antenne *) GPS Antenne
N TNC Montiert
1
N
2
3
N N
TNC
4 TNC
5
Radio *) HG 61430YD
6
*)
24 VDC
8
7 USV 100 – 240 VAC
USV
Batterie
Tabelle 13 Komponenten Referenzstation (Abschnitt 1 von 2)
Komponente Bestell-Nr. Beschreibung
RG58, 0.5 m, an der GNSS Antenne befestigt
und mit Schrumpfschlauch versiegelt, TNC Ste-
Kabel 1 HW CAB00042
cker (männlich) gerade / N Buchse (weiblich)
gerade
Kabel 2 ECOFLEX10, projektspezifische Länge, N Ste-
HW CAB00079
Kabel 3 cker (männlich) gerade
Kabel 4 RG58, 2 m, TNC Stecker (männlich) gerade / N
HW CAB00042
Kabel 5 Buchse (weiblich) gerade
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Montage / Verkabelung – Kapitel 4 19
Tabelle 13 Komponenten Referenzstation (Abschnitt 2 von 2)
Komponente Bestell-Nr. Beschreibung
Projektspezifisches Schnittstellenkabel bereit-
Kabel 6 *) HW CAB00135
gestellt von Götting
1x Kabel für 24 V Stromversorgung zwischen
Kabel 7 USV und Control Unit, nicht im Lieferumfang
enthalten
1x Stromkabel, nicht im Lieferumfang enthal-
Kabel 8
ten
Control Unit HG G-61430YD Siehe Kapitel 3 auf Seite 11
GNSS-
HW ANT00044 1x, siehe Abschnitt 4.6 auf Seite 23
Antenne
USV HW DEV00058
Siehee Abschnitt 4.5 auf Seite 23
USV Batterie HW DEV00059
Funk *) HW DEV00101 Siehe Abschnitt 4.4 auf Seite 22
RF- Antenne *) HW ANT00007 Siehe 4.6 auf Seite 23
*) Projektspezifisch, die aufgeführten Komponenten werden in den meisten Pro-
jekten verwendet.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202120 Kapitel 4 – Montage / Verkabelung
4.1.2 Rover
Bild 20 Komponenten und Verkabelung Rover
HF Antenne *) GPS Antennen
TNC TNC TNC Montiert
1 2 3
N N N
4 5 6
N N N
TNC
7 TNC
8 TNC
9
CAN
Fahrzeug-
Funk *) HG 61430YD Ethernet Steue-
10 PROFINET rung
11
24 VDC
Tabelle 14 Komponenten Rover
Komponen-
Bestellnr. Beschreibung
ten
RG58, 2 m, TNC Einbaubuchse (weiblich)
Kabel 1 HW CAB00055
gerade / N Buchse (weiblich) gerade
Kabel 2 RG58, 0,5 m, an der GNSS-Antenne befestigt
und mit Schrumpfschlauch versiegelt, TNC Ste-
HW CAB00042
Kabel 3 cker (männlich) gerade / N Buchse (weiblich)
gerade
Kabel 4 ECOFLEX10, projektspezifische Länge, N Ste-
Kabel 5 HW CAB00079 cker (männlich) gerade / N Stecker (männlich)
Kabel 6 gerade
Kabel 7
RG58, 2 m, TNC Stecker (männlich) gerade / N
Kabel 8 HW CAB00042
Buchse (weiblich) gerade
Kabel 9
Projektspezifisches Schnittstellenkabel, bereit-
Kabel 10 *) HW CAB00135
gestellt von Götting
Kabel 11 1x Stromkabel nicht im Lieferumfang enthalten
Control Unit HG G-61430YD Siehe Kapitel 3 auf Seite 11
GNSS -
HW ANT00044 2x, siehe Abschnitt 4.6 auf Seite 23
Antenne
Funk *) HW DEV00101 Siehe Abschnitt 4.4 auf Seite 22
RF Antenne *) HW ANT00004 Siehe Abschnitt 4.6 auf Seite 23
*) Projektspezifisch, die aufgeführten Komponenten werden in den meisten Pro-
jekten verwendet
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Montage / Verkabelung – Kapitel 4 21
4.2 Montage der Control Unit
Die Control Unit kann auf eine 35 mm Hutschiene entsprechend EN50022 montiert
werden, siehe Abschnitt 3.2 auf Seite 12.
4.3 Anschlüsse zur Control Unit
4.3.1 Referenzstation
Bild 21 Verbindungen zur Control Unit (Referenzstation)
Schnittstellenkabel Kabel zu
HW CAB00135 GNSS Antenne 1
HW CAB00042
GND +24 VDC Versorgung
4.3.2 Rover
Bild 22 Verbindungen zur Control Unit (Rover)
Schnittstellenkabel Kabel zu
HW CAB00135 GNSS Antenne 1
HW CAB00042
CAN_H
GND CAN_L
Kabel zu
GNSS Antenne 2
GND +24 VDC Versorgung HW CAB00042
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202122 Kapitel 4 – Montage / Verkabelung
4.4 Verbindungen zum SATEL Funkmodem HW DEV00101
4.4.1 Referenzstation
Bild 23 Verbindungen zum SATEL Funkmodem (Referenzstation)
Kabel zu
RF Antenne
HW CAB00042
Blinkt beim Senden von
Korrekturdaten
1x pro Sekunde
Schnittstellenkabel
HW CAB00135
4.4.2 Rover
Bild 24 Verbindungen zum SATEL Funkmodem (Rover)
Kabel zur
RF Antenne
HW CAB00042
Modem hört zu
Modem empfängt
Daten
Schnittstellenkabel
HW CAB00135
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Montage / Verkabelung – Kapitel 4 23
4.5 Verbindungen zu USV und Batterie (nur Referenzsta-
tion)
Bild 25 Verbindungen zur USV HW DEV00058 (Referenzstation)
Ausgang: +24 VDC
zur Control Unit Batterie
Brücke
Eingang: 100-240 VAC
Bild 26 Verbindungen zur Batterie HW DEV00059 (Referenzstation)
Zur USV
Sicherung
4.6 Antennen
Die GNSS-Antennen sollten:
– oben auf dem RTG installiert werden.
– am höchsten Punkt des Krans montiert werden, oberhalb von allen Hinder-
nissen.
– soweit wie möglich voneinander entfernt sein, mindestens 2 m.
Die RF-Antenne:
– sollte am höchstmöglichen Punkt auf dem RTG befestigt sein.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202124 Kapitel 4 – Montage / Verkabelung
– sollte die GNSS-Antennen nicht überragen.
– benötigt freie Sicht in alle Richtungen.
Bild 27 Befestigungspositionen für die Antennen (Beispiele)
GNSS Antennen auf einem RTG
RF Antenne
m
sta nd 2
Min. Ab
Skizze, die mögliche Montage-
positionen demonstriert
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Montage / Verkabelung – Kapitel 4 25
Bild 28 Abmessungen der GNSS Antenne HW ANT00044
Bild 29 Referenzstation: Einbau der HF-Antenne HW ANT00007
AufOn
derthe
Spitze
tip Seitlich an at
Laterally derthe
Spitze
tip
Die Antenne kann mit dem mitgelieferten Montagekit auf zwei Arten befestigt wer-
den:
1. Auf der Spitze eines Rohrmasts von 40 – 54 mm Durchmesser (Anschlusskabel
verläuft innerhalb des Masts).
2. Seitlich an der Spitze eines Rohrmasts von 20 – 54 mm Durchmesser
(Anschlusskabel verläuft außerhalb des Masts).
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202126 Kapitel 4 – Montage / Verkabelung
Bild 30 Rover: Montage der HF-Antenne HW ANT00004
NNBuchse
socket
(female)
(female)
HW ANT0004
300 mm
HW CAB00055
Montagebohrung
Mounting drill hole
12
TNC
TNCMontagesockel
assembly
ø13
(female)
socket (female)
Mounting plate
Montageplatte
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Software / Konfiguration – Kapitel 5 27
5 Software / Konfiguration
ACHTUNG!
Nur eigens dafür qualifiziertes Personal sollte Systemeinstellungen vornehmen, da
fehlerhafte Eingaben zu eingeschränkter Systemfunktionalität oder sogar zu ei-
nem Totalausfall des Gesamtsystems führen können!
Für jedes Projekt wird von Götting ein eigens hierfür bestimmter Satz von Konfigu-
rationsdateien erstellt. Diese Dateien werden dem Kunden, z. B. per E-Mail oder auf
einem USB-Stick zur Verfügung gestellt. In der folgenden Konfiguration werden ei-
nige dieser Dateien verwendet.
5.1 Konfiguration der Control Unit
In der Control Unit befindet sich ein HTTP Server, auf den von außen zugegriffen
werden kann. Hierzu verwenden Sie einen geeigneten Internet Browser. Es sollte ein
möglichst aktueller Browser benutzt werden.
Bild 31 Ethernet Verbindung Control Unit
Ethernet
Anschluss
Um die Control Unit zu konfigurieren, schließen Sie einen handelsüblichen PC/Lap-
top über die Ethernet-Schnittstelle ETH an das Gerät an. Stellen Sie sicher, dass die
Geräte kompatible Netzwerkeinstellungen haben (z. B. PC IP: 10.10.10.1, Control
Unit IP: 10.10.10.20, beide Subnetz Masken 255.255.255.0). Sobald PC und Control
Unit über das Netzwerkkabel miteinander verbunden sind, starten Sie den Browser
auf dem PC und geben in die Adresszeile die IP der Control Unit ein, hier im Beispiel
ist es 10.10.10.20 (dies ist auch die Standardadresse der Control Unit). Dann öff-
net sich das Hauptmenü der Control Unit.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202128 Kapitel 5 – Software / Konfiguration
5.1.1 Startbildschirm
Bild 32 Screenshot: Startbildschirm
IP Adresse der Control Unit (Beispiel)
Anzeige von Gerätetyp Anzeige der Seriennummer
und Firmware Version
Auswahlmenü mit Unterpunkten
für die weitere Konfiguration
5.1.2 Login / Passworteingabe
Das Ändern, Speichern oder Hochladen einer Konfiguration sowie das Hochladen ei-
ner Blocktabelle ist passwortgeschützt. Das entsprechende Kennwort lautet 3141.
Die Ansicht einer Konfigurations- oder Blocktabelle sowie das Herunterladen ist
ohne Passworteingabe möglich.
Bild 33 Screenshot: Passworteingabe / Authentifizierung
Passworteingabe
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Software / Konfiguration – Kapitel 5 29
5.1.3 Status
5.1.3.1 Status – Main
Bild 34 Screenshot: Status – Main
Tabelle 15 Status – Main: GNSS
GNSS
Element Funktion
Pos X (BV) X-Koordinate vom GNNSS im Referenzkoordinatensystem
Pos Y (BV) Y-Koordinate vom GNSS im Referenzkoordinatensystem
Pos X X-Koordinate vom GNSS im Fahrzeugkoordinatensystem
Pos Y Y-Koordinate vom GNSS im Fahrzeugkoordinatensystem
Vector-Heading Fahrzeugwinkel aus dem von den beiden GNSS-Antennen
gebildeten Vektor
Vector-Move- Fahrzeugwinkel, berechnet aus der Bewegungsrichtung der
ment GNSS-Hauptantenne
Angle diff. Gemittelte Differenz zwischen: Vektor-Heading und Vektor-
Movement
Buffer Status Interner Zähler
Shift (load com- Seitliche Abweichung durch Bewegung des Trolleys bzw. der
pensation) Last
Tabelle 16 Status – Main: Status
Status
Element Funktion
GNSS Accuracy GNSS-Genauigkeit
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202130 Kapitel 5 – Software / Konfiguration
Tabelle 16 Status – Main: Status
Status
Element Funktion
Mode Initialisierung (Init) / Tracking / Hochpräzision
Application Error Anwendungsfehler (siehe Tabelle 23 auf Seite 35)
System Error Systemfehler (siehe Tabelle 22 auf Seite 34)
Tabelle 17 Status – Main: System
System
Element Funktion
Supply Voltage Gemessene Versorgungsspannung
CPU Temperature Gemessene innere Temperatur der CPU
Tabelle 18 Status – Main: PLC —> Control Unit
PLC —> Control Unit
Element Funktion
Position Trolley Trolley Position
Load Gewicht des Containers
Twistlocks Drehverschlüsse offen / geschlossen
Container Erfasst / Nicht erfasst
Spreader 20 Fuß / 40 Fuß / 45 Fuß
Wheel Position Radposition normal / Querfahrt / Spin Turn
Autosteering Status des Autosteerings, aktiv = ON, inaktiv = OFF
Tabelle 19 Status – Main: Control Unit —> PLC
Control Unit —> PLC
Element Funktion
Position X X-Koordinate im Blockkordinatensystem
Position Y Y-Koordinate im Blockkoordinatensystem
Angle Fahrzeugwinkel im Blockkordinatensystem
Shift Seitliche Abweichung durch Bewegung des Trolleys bzw.
der Last
Speed Gantry Geschwindigkeit
Block Aktuelle Blocknummer / 0 = kein Block gefunden
Accuracy Genauigkeit, siehe Tabelle 40 auf Seite 65
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Software / Konfiguration – Kapitel 5 31
5.1.3.2 Status – GNSS
Bild 35 Screenshot: Status – GNSS
Tabelle 20 Status – GNSS (Abschnitt 1 von 2)
GNSS
Element Funktion
UTC Koordinierte UTC- Weltzeit
Status Aktuelle Form der Positionsbestimmung, mögliche
Zustände:
– „3D Autonomous“, „3D DGNSS“, „3D RTK (Float)“, „3D
SBAS“, „3D RTK Location“, „3D RTK (Fixed)“
– Der Status zeigt die aktuelle Genauigkeit an. Für Auto-
steering muss der Status „3D RTK (Fixed)“ lauten
Diff. Data Age Zeit seit der letzten Übermittlung der Korrekturdaten
Satellites Anzahl der genutzten Satelliten
Accuracy Positionsgenauigkeit
Distance to Base Abstand zwischen der GNSS-Antenne der Referenzstation
und der GNSS-Antenne ANT1
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202132 Kapitel 5 – Software / Konfiguration
Tabelle 20 Status – GNSS (Abschnitt 2 von 2)
GNSS
Element Funktion
Position (WGS84) Geodätisches Weltsystem 1984, geodätisches Bezugssys-
tem
Position (Local) Anzeige der 3 Dimensionen im kartesischen Koordinaten-
system relativ zur Referenzstation (Basiskoordinatensys-
tem)
Heading Ausgang des zweiten GNSS-Empfängers
– Heading: Anzeige des Winkels in Bezug auf den geo-
graphischen Nordpol
– Distance Antennas: Abstand zwischen ANT1 und ANT2
– Status: Aktuelle Form der Positionsbestimmung des
zweiten Empfängers, mögliche Zustände:
„Autonomus“, „RTK (Float)“, „RTK (Fixed)“, „DGNSS“,
„not available“ (nicht verfügbar, für eine korrekte Funk-
tion muss der Status „RTK (Fixed)“ sein
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Software / Konfiguration – Kapitel 5 33
5.1.3.3 Status – TCP
Bild 36 Screenshot: Status – TCP
Tabelle 21 Status – TCP
TCP
Element Funktion
Socket Anzahl der TCP-Verbindungen
State Status, mögliche Zustände:
„FREE“, „CLOSED“, „LISTEN“, „SYN_REC“, „SYN_SENT“,
„FINW1“, „FINW2“, „CLOSING“, „LAST_ACK“, „TWAIT“,
„CONNECT“
Rem IP IP-Adresse des externen (remote) Kommunikationspart-
ners dieser TCP-Verbindung
Rem Port Port des externen Kommunikationspartners dieser TCP-
Verbindung
Loc Port Lokaler Port dieser TCP-Verbindung
Timer Zeitüberschreitung für diese TCP-Verbindung
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202134 Kapitel 5 – Software / Konfiguration
5.1.3.4 Status – Errors
Bild 37 Screenshot: Status – Errors
Siehe Kapitel 9 auf Seite 69 zu Lösungsstrategien zur Fehlerbehebung.
Tabelle 22 Status – Errors: System Error (Abschnitt 1 von 2)
System Error
Wert Fehler Ursache
0x0001 Flash Erase Ein Fehler ist während des Löschens des internen
Flash-Speichers aufgetreten
0x0002 Flash Programming Bei der Programmierung des internen Flash-Spei-
chers ist ein Fehler aufgetreten
0x0004 Flash Read Beim Lesen aus dem internen Flash-Speicher ist
ein Fehler aufgetreten
0x0008 Drive F Init Initialisierung des Dateisystems fehlgeschlagen
0x0010 Drive F Check Bei der Überprüfung des Dateisystems ist ein Feh-
ler aufgetreten
0x0020 Drive F Defrag Bei der Defragmentierung des Dateisystems ist ein
Fehler aufgetreten
0x0040 Parameter File Parameterdatei fehlerhaft
0x0080 USB Fehler bei der Ausführung des USB-Stacks
0x0100 Ethernet Fehler während der Ausführung des Ethernet-
Stacks
0x0200
0x0400
0x0800
0x1000
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Software / Konfiguration – Kapitel 5 35
Tabelle 22 Status – Errors: System Error (Abschnitt 2 von 2)
System Error
Wert Fehler Ursache
0x2000
0x4000
0x8000
Tabelle 23 Status – Errors: Application Error
Application Error (Anwendungsfehler)
Wert Fehler Ursache
0x0001 Bad GNSS Data Daten vom GNSS-Empfänger nicht ausreichend
0x0002 No Base Vector Kein Basisvektor verfügbar
0x0004 No Heading Richtungsbestimmung über zweite Antenne nicht
möglich
0x0008 No Correction Data Kein Empfang von Korrekturdaten
0x0010
0x0020
0x0040
0x0080
0x0100
0x0200
0x0400
0x0800
0x1000
0x2000 Profinet Profinet Kommunikation gestört
0x4000 Ethernet UDP Ethernet UDP-Kommunikation gestört
0x8000 CAN1 CAN1 Kommunikation gestört
5.1.4 Konfiguration
Um Parameter ändern zu können, müssen Sie sich zunächst authentifizieren.
Geben Sie das Passwort ein (wie in Abschnitt 5.1.2 auf Seite 28 gezeigt).
Geänderte Parameter werden nur gespeichert, wenn auf der entsprechenden Konfi-
gurationsseite auf die Schaltfläche OK geklickt wird.
Bei der Konfiguration einer neuen Anlage ist die Vorgehensweise in der Regel fol-
gendermaßen:
1. Konfigurieren eines Master-Krans.
2. Speichern der Werte des Master-Krans auf einem USB-Stick, siehe Abschnitt
5.1.7 auf Seite 43.
3. Übertragen der Werte des Master-Krans auf nachfolgende Krane, indem Sie den
Parametersatz des Master-Krans importieren, siehe Abschnitt 5.1.7 auf Seite 43.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.202136 Kapitel 5 – Software / Konfiguration
4. Überprüfen Sie, ob die nachfolgenden Krane ebenso gut fahren, wie der Master-
Kran. Manchmal reagieren sie etwas anders. Wenden Sie in diesen Fällen Off-
sets auf die importierten Einstellungen des Master-Krans an, anstatt die Master-
Werte zu ändern. Ein Beispiel hierfür ist der Parameter Antenne 1 reference dis-
tance Y. Stellen Sie ihn auf dem Masterkran ein, danach stellen Sie, falls erfor-
derlich, bei den nachfolgenden Kranen Antenne 1 offset X und Antenne 1 offset
Y ein (siehe Abschnitt 5.1.4.3 auf Seite 39).
5.1.4.1 Configuration – General
Bild 38 Screenshot: Configuration – General
Tabelle 24 Configuration – General
General
Element Funktion
Device Number Frei einstellbare Fahrzeugnummer
Device Type „Basis“ (Referenzstation) oder„Rover“
Interface to PLC „CAN1“, „Ethernet/UDP“ oder „PROFINET“
Je nach Schnittstelle sieht der Bildschirm anders aus, siehe
unten.
Systembeschreibung HG S-57652ZD | Deutsch, Revision 08 | Stand: 05.05.2021Sie können auch lesen

















































