Methoden für die Bewertung der Mensch-Maschine-Interaktion beim teilautomatisierten Fahren - Berichte der Bundesanstalt für Straßenwesen
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Methoden für die
Bewertung der Mensch-
Maschine-Interaktion beim
teilautomatisierten Fahren
Berichte der
Bundesanstalt für Straßenwesen
Fahrzeugtechnik Heft F 141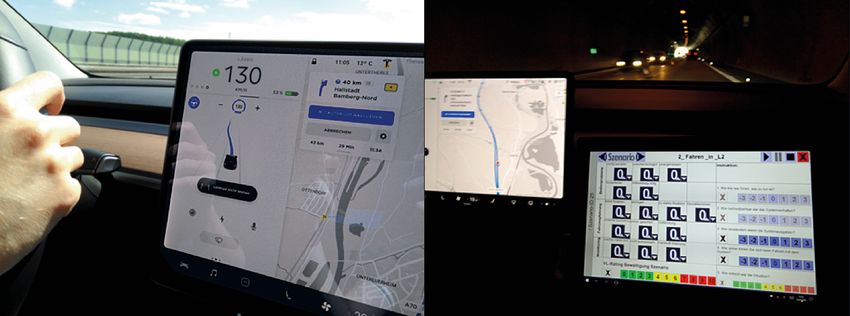
Methoden für die
Bewertung der Mensch-
Maschine-Interaktion beim
teilautomatisierten Fahren
von
Nadja Schömig
Katharina Wiedemann
Ruth Julier
Alexandra Neukum
Würzburger Institut für Verkehrswissenschaften
WIVW GmbH
André Wiggerich
Heike Hoffmann
Bundesanstalt für Straßenwesen
Berichte der
Bundesanstalt für Straßenwesen
Fahrzeugtechnik Heft F 141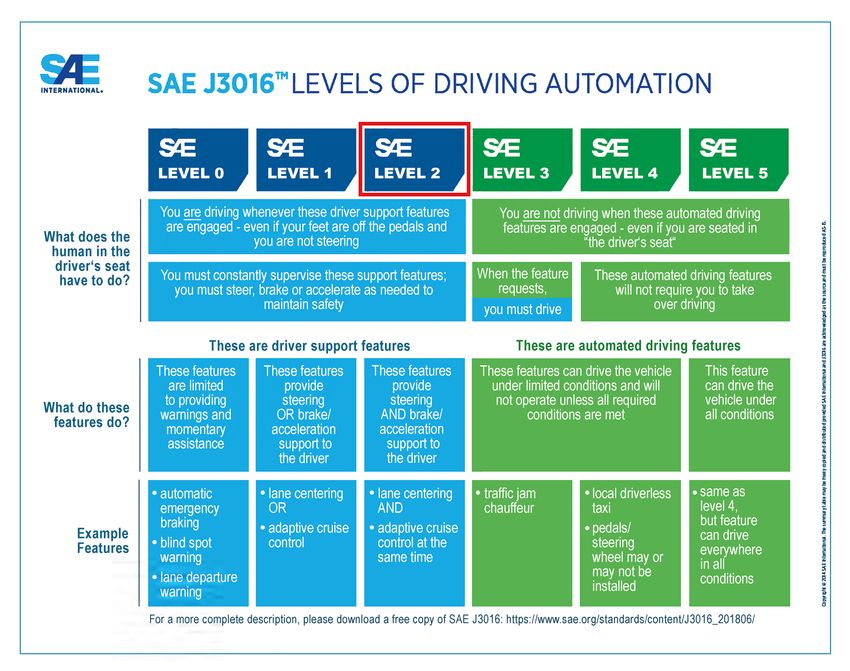
Die Bundesanstalt für Straßenwesen veröffentlicht ihre Arbeits- und Forschungs ergebnisse in der Schriftenreihe Berichte der Bundesanstalt für Straßenwesen. Die Reihe besteht aus folgenden Unterreihen: A - Allgemeines B - Brücken- und Ingenieurbau F - Fahrzeugtechnik M- Mensch und Sicherheit S - Straßenbau V - Verkehrstechnik Es wird darauf hingewiesen, dass die unter dem Namen der Verfasser veröffentlichten Berichte nicht in jedem Fall die Ansicht des Herausgebers wiedergeben. Nachdruck und photomechanische Wiedergabe, auch auszugsweise, nur mit Genehmigung der Bundesanstalt für Straßenwesen, Stabsstelle Presse und Kommunikation. Die Hefte der Schriftenreihe Berichte der Bundesanstalt für Straßenwesen können direkt bei der Carl Ed. Schünemann KG, Zweite Schlachtpforte 7, D-28195 Bremen, Telefon: (04 21) 3 69 03 - 53, bezogen werden. Über die Forschungsergebnisse und ihre Veröffentlichungen wird in der Regel in Kurzform im Informationsdienst Forschung kompakt berichtet. Dieser Dienst wird kostenlos angeboten; Interessenten wenden sich bitte an die Bundesanstalt für Straßenwesen, Stabsstelle Presse und Kommunikation. Die Berichte der Bundesanstalt für Straßenwesen (BASt) stehen zum Teil als kostenfreier Download im elektronischen BASt-Archiv ELBA zur Verfügung. https://bast.opus.hbz-nrw.de Impressum Bericht zum Forschungsprojekt 82.0708+82.0709 Methoden für die Bewertung der Mensch-Maschine-Interaktion beim teilautomatisierten Fahren Fachbetreuung André Wiggerich Heike Hoffmann Referat Automatisiertes Fahren Herausgeber Bundesanstalt für Straßenwesen Brüderstraße 53, D-51427 Bergisch Gladbach Telefon: (0 22 04) 43 - 0 Redaktion Stabsstelle Presse und Kommunikation Druck und Verlag Fachverlag NW in der Carl Ed. Schünemann KG Zweite Schlachtpforte 7, D-28195 Bremen Telefon: (04 21) 3 69 03 - 53 Telefax: (04 21) 3 69 03 - 48 www.schuenemann-verlag.de ISSN 0943-9307 ISBN 978-3-95606-591-0 Bergisch Gladbach, Juni 2021
3
Kurzfassung – Abstract
Methoden für die Bewertung der Mensch- eine Befragung des Fahrers zu einzelnen MMS-An-
Maschine-Interaktion beim teilautomatisierten zeigen und Systemreaktionen erfasst. Diese Be-
Fahren wertungskategorien sind in anschaulicher Form in
einer Tablet-Anwendung, der sog. S.A.D.E.-App
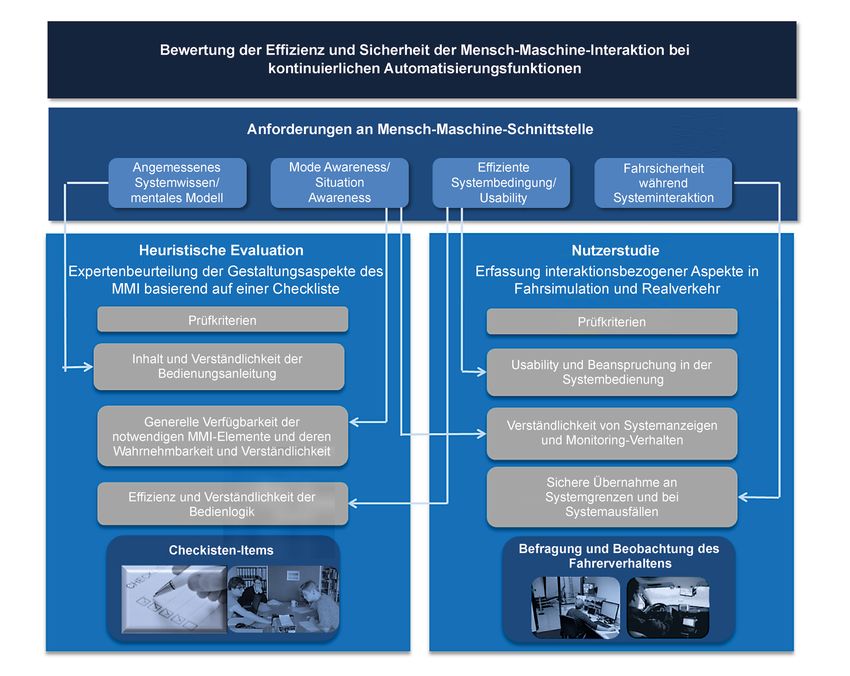
Der Bericht stellt zwei standardisierte methodische (Standardized Application for Automated Driving
Ansätze zur Bewertung der Effizienz und Sicherheit Evaluation), umgesetzt. Die Methode wurde in zwei
der Mensch-Maschine-Interaktion (MMI) bei der Simulatorstudien und während einer Fahrt im Real-
Nutzung von teilautomatisierten Fahrfunktionen vor. verkehr mit einem Seriensystem erprobt und vali-
Dazu wurden Prüfkriterien definiert, welche die Er- diert.
füllung der dazu notwendigen Anforderungen an die
Vermittlung eines angemessenen Systemwissens, Für eine umfassende, standardisierte Bewertung
eines adäquaten System- und Situationsbewusst- der Mensch-Maschine-Interaktion beim teilautoma-
seins, einer wenig beanspruchenden Systembedie- tisierten Fahren wird empfohlen, beide Methoden in
nung und einer sicheren Fahrerreaktion an System- Kombination zu verwenden. Das Verfahren kann
grenzen erfassen sollen. um zusätzliche Methodenbausteine zur Erfassung
der langfristigen Entwicklung von Systemvertrauen
Mittels einer Expertenbewertung als erste Methode und -akzeptanz sowie Verhaltensanpassungen er-
wird geprüft, ob die Mensch-Maschine-Schnittstelle weitert werden.
(MMS, d. h. die Anzeigen, Systemausgaben und
die Bedienelemente) die Mindestanforderungen be-
züglich Wahrnehmbarkeit und Verständlichkeit von User studies for the evaluation of human-
Systemzuständen erfüllt. Der Fokus liegt dabei auf machine-interaction with partial automated
visuellen und akustischen Systemausgaben. Zu- driving functions
sätzlich werden Aspekte der Vermittlung eines an-
gemessenen Systemverständnisses über das Be- The report presents two standardized methodo-
nutzerhandbuch sowie der Systembedienung be- logical approaches for evaluating the efficiency and
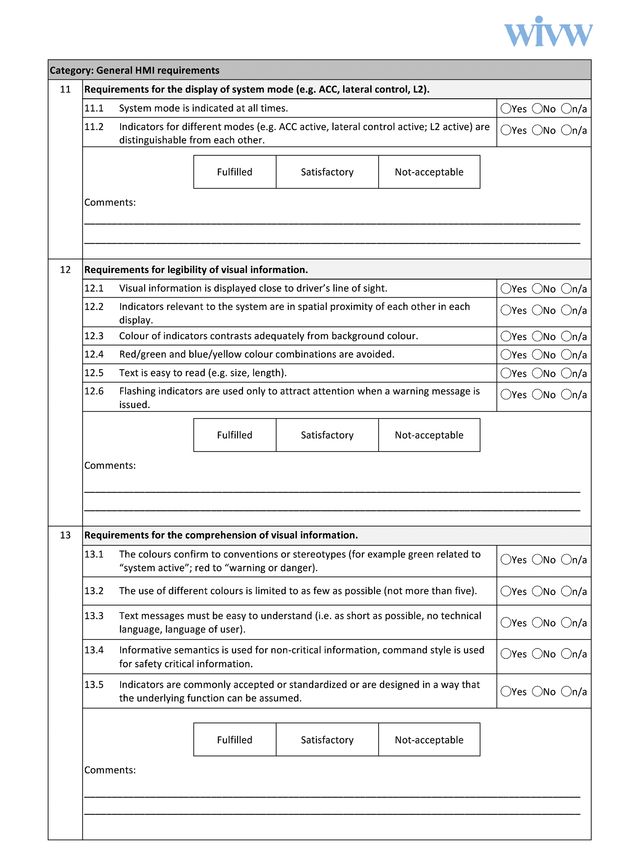
wertet. Zur Überprüfung dieser Aspekte wurde eine safety of human-machine interaction in the use of
Checkliste mit insgesamt 14 Anforderungen entwi- partially automated driving functions. For this
ckelt. Das Verfahren kann auf Teststrecken oder im purpose, test criteria were defined to assess the
Realverkehr angewendet werden. Dazu wird ein fulfilment of the necessary requirements for
Set an Use Cases durchfahren, anhand derer die conveying adequate system knowledge, adequate
Erfüllung der einzelnen Items abgeprüft wird. Die system and situation awareness, easy system
Checkliste wurde im Rahmen von zwei Realfahrstu- operation and safe driver reaction at system
dien und einer Fahrsimulatorstudie erprobt und wei- boundaries.
terentwickelt. Dabei stand die Überprüfung der Vali-
As a first method, an expert evaluation is used
dität (d. h. kann die Checkliste unterschiedlich gute
to check whether the human-machine interface
Mensch-Maschine-Interaktionskonzepte voneinan-
(HMI, i.e. displays, system outputs and operating
der unterscheiden) sowie der Reliabilität (d. h. in-
elements) meets the minimum requirements
wieweit kommen unterschiedliche Rater bei der Be-
regarding the perceptibility and comprehensibility of
wertung eines Systems auf vergleichbare Ergebnis-
system states. The focus is on visual and acoustic
se) im Vordergrund.
system outputs. In addition, aspects of conveying
Als zweite Methode wurde ein standardisiertes, an appropriate understanding of the system via the
szenarienbasiertes Beobachtungs- und Befra- user manual and system operation are evaluated.
gungsinstrument zur Bewertung der Systeminterak- A checklist with a total of 14 requirements was
tion entwickelt. Als Bewertungskriterien werden developed to check these aspects. The procedure
Probleme bei der Systembedienung, im Fahrverhal- can be applied in a driving simulator, on test tracks
ten sowie Einschränkungen des Überwachungsver- or in real traffic. For this purpose, a set of use cases
haltens erfasst, die in ein übergeordnetes Versuchs- is experienced, on the basis of which the fulfilment
leiterrating pro Use Case münden. Darüber hinaus of the individual items is checked. The checklist was
werden Aspekte des Systemverständnisses über tested and further developed in two real-life driving
4 studies and one driving simulator study. The focus was on evaluating the validity (i.e. can the checklist distinguish between human-machine interaction concepts of different quality?) and the reliability (i.e. to what extent do different experts arrive at comparable results when evaluating a system?) As a second method, a standardized, scenario- based observation and survey tool for the evaluation of system interaction in the context of user studies was developed. As evaluation criteria, problems with system operation, driving behaviour and inadequacy of the monitoring behaviour are recorded, which lead to a superordinate examiner rating per use case. In addition, aspects of system understanding are recorded by questioning the driver about HMI-indicators and system reactions. These evaluation categories are implemented in a tablet application, the so-called S.A.D.E.-App (Standardized Application for Automated Driving Evaluation). The method was tested and validated in two simulator studies and under real traffic conditions with a series production vehicle. For a comprehensive, standardized evaluation of the human-machine interaction during partially automated driving, it is recommended to use both methods in combination. The procedure can be extended by additional methods to evaluate the long-term development of system trust and acceptance as well as behavioural adaptations.
5
Summary direct interaction with the system it must be checked
to what extent the driver is able to understand the
presented information and use them safely and
effectively. It must be assured that the driver reaches
User studies for the evaluation of human- a sufficient level of system, mode and situation
machine-interaction with partial automated awareness and is not overloaded due to the
driving functions interaction with the system. For these issues, it is
necessary to directly observe the user’s interaction
with the system and the HMI. For the assessment of
the HMI of partial automated driving functions two
Objective methods are proposed that should be used in
By now many vehicle manufacturers offer vehicles combination. The subordinate goal is to develop a
comprehensive, standardized evaluation concept
with partial automation driving functions (so called
for HMI in automated driving which contains all
Level 2-systems) with continuously automated
relevant evaluation tools and criteria for a safe and
longitudinal and lateral vehicle control. In such
efficient human-machine-interaction.
systems, the driver remains responsible for
supervising traffic and the automated system. The first tool is the heuristic evaluation of the HMI
performed by experts. By means of a checklist,
Empirical research in this field shows that there is a
experts rate whether the minimal requirements on
relatively high level of acceptance and trust in such
the HMI regarding perceptibility and understandability
systems. The driver perceives a relief at least in
of system states are fulfilled. This is mainly focused
some driving situations, such as driving in traffic
on the design of the outputs of the HMI. In addition,
jams. In general, however, the monitoring task is
elements of system usage and the ability of the user
perceived as exhaustive. During the usage of these
manual to create an adequate system understanding
systems drivers tend to direct their attention to other
are included as evaluation items. The checklist
non-driving-related tasks. Contradictory statements
method was developed in a project running in
exist regarding the ability of drivers to react to
parallel to this project and is documented in a
system limits in Level-2-systems. It seems less
separate report.
problematic in cases where system limits are
expectable, full attention is at the road and a warning The second method proposed here are user studies
is given. However, for most of the situations in L2- in which the interaction-related aspects of a safe
systems this cannot be guaranteed. Drivers must human-machine-interaction of partial automated
also be able to immediately intervene in sudden, driving functions are investigated. Beside the
critical events. There are initial indications that an evaluation of HMI-aspects also effects of the system
appropriate design of the Human-Machine-Interface design can be assessed.
(HMI) might support drivers in this task.
With this background a scenario-based, stand-
ardized assessment tool was developed in this
project. By means of a tablet-application it is
Overall evaluation concept possible to assess observation and survey variables
that can be used to derive aspects such as system
To date, there are no standardized tools for the understanding and system awareness, situation
assessment of the usability and safety of partial awareness, workload during the use of the system
automated driving functions. The goal of the project and the ability for a safe and efficient behavior in
was to develop approaches in order to evaluate case of system limits and system errors. The method
whether drivers are able to adequately deal with is applied in relevant use cases during user studies
such vehicles. in the driving simulation or in real vehicles.
On the one hand, it must be evaluated whether the
human-machine-interface (HMI) is able to support
driver’s understanding of system functionality and a Demand on user studies
safe management of system limits. This requires
the definition of minimal requirements on the design As precondition of the usage of the tablet-based
of HMI for automated systems. Furthermore, in the evaluation tool some basic, technical demands for
6
user studies in the driving simulation were defined. Development of the standardized
They refer to the relevant characteristics of a
prototypic L2-system and its HMI-elements that
evaluation tool
must be implemented in the simulation. These For the evaluation of interaction-related aspects of
characteristics were derived from a benchmark- the safe human-machine-interaction of continuous
analysis of existing serial L2-systems on the market. L2 automated driving functions the following
They include the implementation of the following relevant evaluation criteria were formulated: First,
features: an automated speed-and distance keeping aspects of the driver behavior which are assessed
function, an automated lateral control function, a by observation of the driver in the interaction with
lane-change assistance function, a hands-on the system via the human-machine-interface (HMI).
detection in the steering wheel, a system logic on Several errors/problems in three areas of system
the basis of a system state diagram and defined operation, driving behavior and monitoring behavior
transitions between the system states (by which are defined which can separately be coded by the
actions or events and under which conditions does test administrator. Based on predefined rules, a
a transition from one to another state happen?), a generic rating about the ability of handling the use
HMI-logic including the respective visual display case is then derived from the observed problems in
elements and a system operation logic including the
each scenario. Furthermore aspects of system
respective control elements. Some parameters
understanding should be assessed by a specific
should be freely configurable in order to vary them
survey to single HMI notifications and system
in the context of an empirical study such as the way
reactions (e.g. how clear was the system operation?
of operating the system, the hands-off strategy, the
How understandable were HMI outputs, how
presence of warnings in case of system limits, the
comprehensible was the system’s behavior?).
quality of lateral control and the frequency of failures
in lateral control (based on “simulated” sensor Those evaluation criteria were implemented in the
problems). so called tablet-application S.A.D.E. The acronym
stands for Standardized Application for Automated
The test scenarios for the evaluation of the systems
Driving Evaluations and is an application of the
were derived from a use case catalogue. This
driving simulation software SILAB® for the
defines use cases as all possible steady system
conduction of driver observations and driver surveys
states (driving in a certain automation level or
in partial automated driving on Level 2 via a tablet-
specific system state, such as change of system
PC. The test administrator can use the application
settings or degraded system systems, e.g. due to
for recording predefined error categories in system
temporary failures in lateral control) and all
operation (e.g. delayed, inadequate, operating
transitions between these system states. The
error, support necessary), driving behavior (e.g.
transitions are further categorized according to
delayed reaction, inadequate securing behavior,
whether they are initiated by the system or the driver
endangerment, collision, lane exceedance,
and whether they are directed upwards (towards
unprecise lane keeping) and monitoring behavior
higher automation levels) or downwards (towards
(insecure hands-on behavior, inadequate
lower automation levels). Based on the system logic
inattention, occurrence of hands-off warnings) via
of the evaluated system and the respective research
the touch interface, can rate the managing of the
question test scenarios are derived which contain a
scenario as a whole and can conduct a standardized
specification of the concrete human-machine-
interaction in a certain environmental condition. A questioning of the subject during a test drive. By the
prototypic test layout created from the defined clearly arranged and vivid graphical presentation of
requirements was implemented both in the driving the error categories and the questions including the
simulator of the Würzburg Institute for Traffic rating scales as well as by the partially automated
Sciences (WIVW GmbH) and in the simulator of the counting of driving errors for certain categories, the
Federal Highway Research Institute (BASt). test administrator is supported in the observation
and objectivity of the procedure is increased.
The application provides a data output file in a text-
format, which contains the data for each variable
per scenario. The usage and the graphical user
interface as well as the procedure of the test is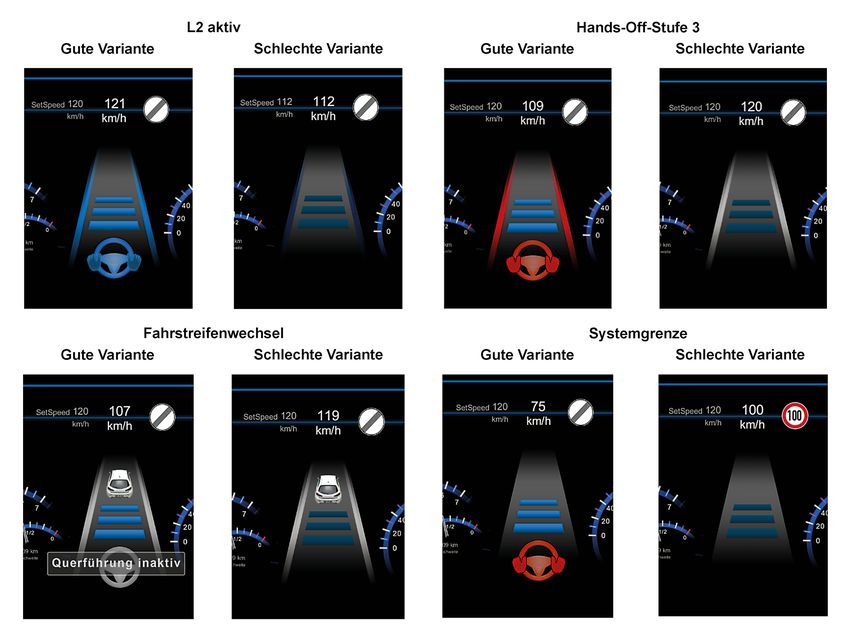
7
described in detail in the project report. For an The two designed HMI-variants were varied as a
optimal training in the application of the tool training between-subjects factor in the study. A second
materials are available. The tablet-app and its between-subject factor was the sequence of the two
evaluation criteria were explored and validated critical situations “sharp bend” and “stationary
within two simulator studies with different research vehicle”. In the two drive orders, these scenarios
questions. were changed while the sequence of the other
scenarios remained constant.
N = 24 drivers participated in the study. They
were recruited from the WIVW test driver panel.
Application of the evaluation tool 11 from them were female. Mean age was 41.2
in a driving simulator study at the years (SD = 14.3 years). N = 12 drivers each
WIVW facility experienced the HMI-variant A and B. Both
groups were comparable with regard to charac-
The first user study was conducted in the dynamic teristics such as age, driving performance, and prior
driving simulator of the WIVW GmbH. The objective experience with assistance systems and automated
was to evaluate whether HMI design issues defined systems (from other simulator studies).
from a previous expert evaluation using a checklist
are also reflected in the behavior and experience of The study procedure was the following: after a short
real users. For this purpose, two HMI variants were manual introduction drive the subjects read a short
designed that differed in mayor design aspects of user manual which was adapted to the two HMI-
the HMI, e.g. regarding the system operation logic variants. Then, they received general instructions
(way of activating ACC, location and labeling of for the simulator drive and the usage of the rating
control elements), the visual display elements (way scales. This was followed by the test drive in the
of displaying the active lateral control and the driving simulator where subjects experienced all
lane change, contrast between foreground and relevant use cases and where immediately asked
background), and the warning concept (presence of after each use case. The test administrator recorded
a visual and acoustic warning in situations with observed problems during system operation, driving
detected system limits). These differences were behavior and monitoring behavior by using the
deliberately designed that they result in different tablet-app for which they had received training
ratings on the developed checklist items. One “high before. After the test drive subjects had to fill out a
compliant” HMI-variant A and one “low-compliant questionnaire regarding different aspects about the
HMI-variant B resulted from that procedure. The HMI derived from the items of the checklist. The
test course in the simulation had a length of 36 km total duration of the study was 1 hour.
and consisted of the following use case set: system Beside the tablet-data also objective driving data
activation, longer driving with active L2-system were analyzed for the two critical scenarios.
(several times during the route), driver-initiated lane
change, temporary failures in lateral control due to The study showed that the designed differences
missing lane markings, system failure at a broken- in the two HMI-variants did also affect driver’s
down vehicle (a stationary vehicle is not detected by behavior and subjective experiences of the system.
the sensors, system stays active, driver has to The warning strategy in case of the system limit at
intervene) and a system limit (system is not able to the sharp bend had an influence. The absence of
manage a sharp bend, lateral control is deactivated), a visual and acoustic warning resulted in a worse
system deactivation by driver. The test course was lane keeping behavior and a worse system under-
on a four lane highway (two lanes in each direction). standing. The differences in system operation
The target speed was 120 km/h. Drivers should stay resulted in a higher frequency of problems, such as
on the right lane with exceptions for the lane change a more frequent insecure or delayed activation
and the avoidance maneuver at the stationary behavior or incomplete activation which required a
vehicle. On the left lane there was moderate traffic. support by the test administrator. The variation in
In the scenarios lane change and stationary object the distinctness of system states which were
there was no other traffic present to create influenced by the visual contrast and the used
comparable situations for all subjects. The complete indicators for the active lateral control function
duration of the drive was 20 minutes. were also perceived as different by the two HMI-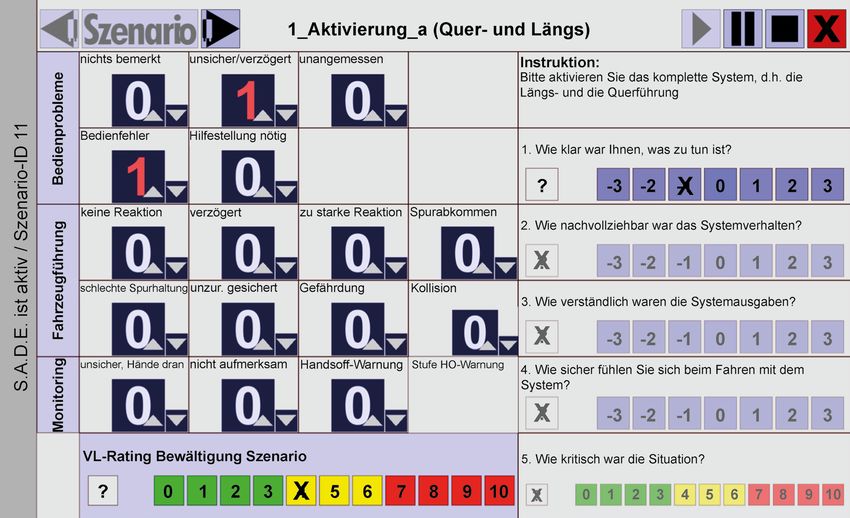
8
variants although they had no effect on the driving Application of the evaluation tool
performance (at least in the non-critical temporary
failures in lateral control). Altogether however, due
in a driving simulator study at the
to the small sample size most effects only reached BASt facility
a tendency in significance.
A second user study had the objective to investi-
The global rating of the test administrator per gate the effects of different system behavior
scenario mainly reflected the subordinate categories characteristics, especially the quality of lane keeping
which makes it very suitable to reach a fast and performance, on the behavior and experience of a
efficient global impression of the system. The fact user. In the present report only the methodology of
that the identified differences in the observed dri- the study is described. The conduction and results
ving behavior on the dichotomous categories of the study will be documented in the final public
correspond with the analysis of time-based objec- BASt report by the authors of the study.
tive data (e.g. more frequent events of lane
The user study was conducted in the static driving
exceedances → higher maximum lateral deviation
simulator of BASt. In advance a suitable control
values, more frequent delayed braking reactions
element, a hands-on detection and a second
and endangerment → smaller minimum time-to-
camera in order to observe the driver’s inputs at
collision values) make the latter which are more
the steering wheel had been implemented. The
time and resource-intensive obsolete. This makes
standardized evaluation tool S.A.D.E. was im-
the evaluation tool especially useful for the
plemented on a tablet-PC and integrated in the
application in the real vehicle which does not
network. As partial automated driving system the
provide data about driving performance.
same one was used as in the WIVW study. It
In contrast to expectations the results showed a combines automated longitudinal and lateral vehicle
difference in the two experimental conditions with a control. The system is operated via buttons at the
worse driver behavior for the HMI-variant A in the steering wheel.
scenario stationary vehicle although the system
For answering the research question the quality of
behavior and the HMI outputs were identical for
lane keeping assistance was varied on two
the two HMI-variants. This effect was independent
dimensions: the extent of lane centering of the
from scenario sequence or sample characteristics
lateral control (perfect vs. within a range) and the
such as age, gender, driving performance or prior
frequency of “simulated” sensor problems (no vs.
experience with assistance and automated systems.
frequent). These two factors were combined to four
At this point, it can only be speculated what the
system variants and varied as between-subject-
reasons for this difference are. Probably the
factor.
experience of a “good” HMI led to a higher system
trust and to the impression of a higher system The driving course consisted of two 15-minutes
performance. As a result subjects might have waited sections in which the subjects could drive with the
longer before they realized that the system would automated system on Level 2, each condition with
not manage the situation. However, the data of the its system variant of lateral control. After these
study do not provide any more evidence for that longer sections a critical scenario followed. One test
hypothesis. scenario was the system limit at the sharp bend
where the lateral control was deactivated and the
Beside the described content-related results also
driver had to steer to avoid leaving the lane. The
some methodological issues arose that can be
other test scenario was the stationary object which
used for further improvements of the tool. Some
was announced by a warning sign at the road shortly
recommendations were made by the test ad-
before. The driver had to notice that the system will
ministrator regarding the integration of single
not detect the stationary vehicle and will stay active
observation categories into one. In general, there
so that they had to intervene by steering and/or
was a low need for corrections of the error recordings
braking (both scenarios where identical to those in
and the test administrator had no problems in the WIVW study). Online driver behavior and survey
creating the global ratings based on the single error were conducted by the S.A.D.E.-App.
categories and the predefined rules. This makes the
method and the unidimensional rating scale a very The results of the study will show whether aspects
effective tool. of system behavior, such as the design of the lateral
9
control function will affect driver monitoring behavior Potential constraints of the method mainly refer to
and the resulting take-over ability at system limits. the component of questioning the subjects. It can
be expected that users are not very good in rating
the relevant single HMI elements objectively and in
the expected accuracy. For such design aspects it
Application of the method in real seems more appropriate to use the expert-based
traffic heuristic evaluation method.
For the application of the method in real traffic the Further constraints refer to the application of the
app was reconfigured so that it can also be used method in real traffic. Due to safety reasons it is not
flexible in a less controlled environment as it is the possible to test potentially dangerous situations
case in the real world. Some observation cate- such as unpredictable system limits or system
gories were summarized, some were deleted. The failures and their effects on driving behavior (in the
graphical user interface was adapted so that the sense of controllability testing). In addition, it is
name of the current use case was placed in a problematic that it is not possible to guarantee
prominent location and that it included the instruction controlled and comparable conditions for all subjects
for the subjects how to behave in respective use experiencing the system. Due the named reason it
cases. With regard to the operation of the app the is recommended to better use the method on test
test administrator can now actively switch to a new tracks.
use case and can also deviate from the given use Altogether, the user study and the checklist tool
case sequence by using a forward and backward are recommended as two methods that should
function. be used in combination. Those can be further ex-
panded by other method-elements, e.g. a structured
The app was tested in a real drive with the auto-
interview for the evaluation of the mental model
pilot function integrated in a Tesla Model 3. It helped
developed during the usage of the system and
to give useful recommendations for the usage
naturalistic driving studies for the assessment of
of the tool and the test procedure in real traffic.
longterm-effects such as the developments of
Furthermore, suggestions for the choice of a
system trust, acceptance, intentions to use and
suitable on-road test course are given.
behavioral adaptations.
Final evaluation of the method
In summary, the developed instrument is considered
as a valuable tool for the evaluation of the human-
machine-interaction in partial automated driving
within the scope of user studies. It can be flexibly
applied in various test environments and provides
an efficient data entry and analysis. The testing
procedure, the test scenarios and the evaluation
criteria are standardized. The ratings of the ob-
served behavior and experiences of the drivers are
based on defined guidelines and therefore objective
and normative.
In general, user studies have the advantage that not
only hypothetical problems can be identified but
also the real problems occurring in the direct
interaction of a real user with the system. It allows
the assessment of both the intuitive behavior in
the first contact with the system and learning or
sequence effects. By using realistic test scenarios
the effects on driving safety can be estimated.11
Inhalt
1 Herleitung der Methoden zur 2.5.2 Erprobung im Rahmen einer Simula-
Bewertung von teilautomatisierten torstudie . . . . . . . . . . . . . . . . . . . . . . . . 39
Fahrfunktionen . . . . . . . . . . . . . . . . . . 13
2.5.3 Finale Erprobung im Realverkehr . . . . . 44
1.1 Definition und Beschreibung teilauto-
2.6 Gesamtbewertung und Limitationen
matisierter Fahrfunktionen . . . . . . . . . . 13
des Verfahrens . . . . . . . . . . . . . . . . . . . 45
1.2 Potenzielle Problembereiche des teil-
automatisierten Fahrens . . . . . . . . . . . . 15
3 Szenarienbasiertes Beobachtungs-
1.3 Bewertungsmethoden: Experten- instrument für die Bewertung der
bewertung und Nutzerstudie . . . . . . . . . 18 Mensch-Maschine-Interaktion in
1.4 Definition von Anforderungen und Nutzerstudien . . . . . . . . . . . . . . . . . . . 46
Prüfkriterien . . . . . . . . . . . . . . . . . . . . . . 19 3.1 Anforderungen an das Bewertungs-
1.5 Definition der zu testenden Use instrument . . . . . . . . . . . . . . . . . . . . . . . 46
Cases . . . . . . . . . . . . . . . . . . . . . . . . . . 22 3.2 Definition der Bewertungskategorien . . 48
1.6 Übersicht Methodenbeschreibung . . . . 24 3.2.1 Beobachtungskategorien . . . . . . . . . . . 48
3.2.2 Befragungskategorien . . . . . . . . . . . . . . 49
2 Checkliste für die Expertenbewer-
tung der Mensch-Maschine- 3.2.3 Gesamturteil . . . . . . . . . . . . . . . . . . . . . 50
Schnittstelle . . . . . . . . . . . . . . . . . . . . . 25
3.3 Umsetzung der Methode in eine
2.1 Aufbau der Checkliste . . . . . . . . . . . . . . 25 Tablet-Applikation . . . . . . . . . . . . . . . . . 50
2.2 Definition der Bewertungskategorien 3.3.1 App-Oberfläche . . . . . . . . . . . . . . . . . . . 51
und -prinzipien . . . . . . . . . . . . . . . . . . . . 27
3.3.2 Anwendung der App in der Fahr-
2.3 Itemherleitung . . . . . . . . . . . . . . . . . . . . 27 simulation . . . . . . . . . . . . . . . . . . . . . . . 52
2.3.1 Anforderung an das Benutzerhand- 3.3.3 Anwendung der App im Realverkehr . . 54
buch . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3.4 Prüfszenarien . . . . . . . . . . . . . . . . . . . . 55
2.3.2 Anforderungen an die Ausgaben der
Mensch-Maschine-Schnittstelle . . . . . . 31 3.4.1 Definition von Prüfszenarien für
Simulatorstudien . . . . . . . . . . . . . . . . . . 55
2.3.3 Anforderungen an die System-
bedienung . . . . . . . . . . . . . . . . . . . . . . . 34 3.4.2 Auswahl einer geeigneten Prüf-
strecke im Realverkehr . . . . . . . . . . . . . 56
2.3.4 Anforderungen an das System . . . . . . . 35
3.5 Erprobung der Bewertungsmethode . . . 57
2.4 Anwendung der Checkliste . . . . . . . . . . 36
2.4.1 Anforderungen an die Rater . . . . . . . . . 36 3.5.1 Nutzerstudie zum Vergleich verschie-
dener MMS-Konzepte im WIVW-
2.4.2 Zu prüfende Assistenzfunktion und Simulator . . . . . . . . . . . . . . . . . . . . . . . . 57
MMS-Elemente . . . . . . . . . . . . . . . . . . . 36
3.5.2 Nutzerstudie zur Auswirkung der
2.4.3 Testumgebung . . . . . . . . . . . . . . . . . . . . 37 Spurhaltegüte im BASt-Simulator . . . . . 65
2.4.4 Benötigte Ausrüstung . . . . . . . . . . . . . . 37 3.5.3 Erprobung im Realverkehr . . . . . . . . . . 71
2.4.5 Testablauf . . . . . . . . . . . . . . . . . . . . . . . 37
3.6 Gesamtbewertung und Limitationen
2.5 Erprobung und Anpassung der des Verfahrens . . . . . . . . . . . . . . . . . . . 72
Checkliste . . . . . . . . . . . . . . . . . . . . . . . 38
2.5.1 Erste Erprobung im Realverkehr . . . . . . 38 4 Fazit Gesamtbewertungskonzept . . . 7412 Literatur . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77 Bilder . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 82 Tabellen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 83 Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
13
1 Herleitung der Methoden zur muss bei Systemgrenzen oder -fehlern jederzeit in
der Lage sein, korrigierend in die Fahrzeugführung
Bewertung von teilautomati- einzugreifen (siehe Bild 1-1 mit Klassifikation der
sierten Fahrfunktionen Automatisierungsstufen der SAE, 2018: für ähnli-
che Kategorisierungen siehe GASSER et al., 2012;
1.1 Definition und Beschreibung teil NHTSA, 2017).
automatisierter Fahrfunktionen
Die Verantwortlichkeiten des Fahrers beim teilauto-
Viele Hersteller bieten mittlerweile Fahrzeuge mit matisierten Fahren können demnach wie in Tabelle
teilautomatisierten Fahrfunktionen (sog. Level-2- 1-1 zusammengefasst werden. Die Aufgabe des
Systeme oder kurz L2-Systeme, gemäß SAE-Defi- Fahrers ist in der SAE-Definition als OEDR (Object
nition, 2013, 2016, 2018) an, bei denen die Fahr- and event detection and response) bezeichnet und
zeuge die kontinuierliche Längs- und Querführung meint die Objekt- und Eventerkennung, deren Klas-
übernehmen. Gemäß der Klassifikation von Auto- sifikation, die Verhaltensplanung und schließlich die
matisierungsstufen nach SAE ist der Fahrer1 auf Verhaltensreaktion selbst.
dieser Automationsstufe weiterhin für die Überwa-
chung der Verkehrsumgebung verantwortlich und In Abgrenzung zum sog. teilautomatisierten Fahren,
das Gegenstand dieses Berichts ist (im vorliegen-
den Bericht auch Fahren mit Level-2-System oder
L2-System/-Fahrzeug genannt), das aus der Kom-
1 bination einer kontinuierlichen Querführungsassis-
Aus Gründen der einfachen Lesbarkeit wird im Text das gene-
rische Maskulinum verwendet, die Angaben beziehen sich tenz (z. B. einem Spurhalteassistenten) mit einer
jedoch auf alle Geschlechter. kontinuierlichen Längsführungsassistenz (z. B. Ad-
Bild 1-1: Automatisierungsstufen nach SAE (2016) – Rot markiert ist Level 2, die sog. Teilautomation (partial driving automation)14
L2 Verantwortlichkeiten
Fahrer (kontinuierlich) Automatisiertes System (wenn aktiv)
• Führt die Teilaufgaben der dynamischen Fahraufgabe aus, • Führt Teile der Fahraufgabe aus, indem es die laterale (Quer-
die nicht vom automatisierten System ausgeführt werden. führung) und longitudinale (Längsführung) Fahrzeugkontrolle
übernimmt.
• Überwacht das automatisierte System und greift notfalls ein, • Deaktiviert sich sofort nach Eingriff durch den Fahrer.
um die sichere Fahrzeugführung zu gewährleisten.
• Entscheidet selbstständig, ob/wann das System aktiviert vs.
deaktiviert werden sollte.
• Übernimmt sofort die komplette Fahraufgabe, wenn erforder-
lich oder gewünscht.
Tab. 1-1: Verantwortlichkeiten des Fahrers und der Automation in L2-Systemen gemäß SAE (übersetzt aus SAE, 2018, Seite 21)
aptive Cruise Control ACC) besteht und vom Fahrer 2018; analysiert wurden Volvo XC60 PILOT AS-
weiterhin die Überwachungstätigkeit erfordert, sind SIST, Tesla Model S Lenkassistent, BMW Driving
weitere sog. Automationsstufen nach SAE zu unter- Assistant Plus, Cadillac CT6 Supercruise, Merce-
scheiden, die sich im Grad der Unterstützung in der des E-Klasse Lenk-Pilot, Audi Q7 Stauassistent,
kontinuierlichen Fahraufgabe sowie in der Notwen- VW Passat Stauassistent) zeigt sich, dass in den
digkeit zur Überwachung der Verkehrsumgebung meisten Systemen die Längs- und die Querführung
unterscheiden (siehe Bild 1-1). als zwei voneinander getrennte Systeme betrachtet
werden, die gemeinsam genutzt werden können,
• Das sog. manuelle Fahren (ohne kontinuierliche
aber nicht müssen. Häufig ist die Aktivierung des
Assistenzsysteme, aber evtl. mit temporär ein-
ACC-Systems (Adaptive Cruise Control) eine Vo
greifenden Notfallsystemen, wie dem Notbrems
raussetzung, um die Querführung aktivieren zu
assistenten; im vorliegenden Bericht nach SAE
können. Entsprechend können die Systeme auch
auch Level 0 oder L0 genannt)
über verschiedene Bedienelemente – in der Regel
• Das sog. assistierte Fahren (d. h. entweder nur über Tasten am Lenkrad – aktiviert und deaktiviert
kontinuierliche Querführungsassistenz oder nur werden. In einigen Systemen ist die Querführung
kontinuierliche Längsführungsassistenz; im vor- standardmäßig aktiv und muss im Menü explizit de-
liegenden Bericht nach SAE auch Fahren mit aktiviert werden, wenn sie nicht genutzt werden
Level-1-System oder L1-System genannt) soll. Bei allen Systemen auf dem europäischen
Markt handelt es sich um sog. Hands-on-Systeme,
• Das sog. hochautomatisierte Fahren, bei dem d. h. der Fahrer ist aufgefordert, seine Hände wäh-
der Fahrer von der kontinuierlichen Überwa- rend der Systemnutzung am Lenkrad zu lassen. Tut
chungsaufgabe befreit ist, aber weiterhin als er dies nicht, wird nach einer bestimmten Zeit eine
Rückfallebene im Fall einer Systemgrenze zur sog. Hands-Off-Warnung ausgegeben (siehe UN/
Verfügung stehen muss (im vorliegenden Be- ECE R 79, 2010 für eine genaue Spezifikation der
richt nach SAE auch Fahren mit Level-3-System visuellen und akustischen Ausgaben). An System-
oder L3-System genannt) grenzen ist häufig ein sofortiger Fahrereingriff erfor-
derlich, wenn sich das System entweder unmittel-
• Das sog. vollautomatisierte bzw. autonome Fah-
bar abschaltet (z. B. in sehr scharfen Kurven) oder
ren, bei dem der Fahrer nicht mehr als Rückfal-
das System in Situationen, in denen beispielweise
lebene benötigt wird (im vorliegenden Bericht
aufgrund von Sensorproblemen Hindernisse nicht
nach SAE auch Fahren mit L4-/L5-System oder
erkannt werden, trotzdem aktiv bleibt. Bis auf weni-
L4 bzw. L5 genannt). L4- und L5-Systeme unter-
ge Ausnahmen geben die meisten Systeme an Sys-
scheiden sich dahingehen, dass für L5-Systeme
temgrenzen keine explizite Warnung aus. In Fällen,
keinerlei Beschränkungen vorliegen, während
in denen die Sensorik keine Fahrstreifenmarkierun-
die Nutzung von L4-Systemen bestimmten ein-
schränkenden Bedingungen unterliegt (z. B. be- gen erkennt, wechselt die Querführungsassistenz
stimmte Straßentypen). häufig still, d. h. ohne eine Rückmeldung an den
Fahrer in den Stand-by-Zustand, und aktiviert sich
Bei einer Analyse der wesentlichen Systemcharak- selbstständig wieder, sobald die Voraussetzungen
teristika von L2-Serienfahrzeugen (Stand: Frühjahr wieder erfüllt sind.15
Die Mensch-Maschine-Schnittstelle (MMS; d. h. die level erhöht. BIONDI, LOHANI, HOPMAN, MILLS,
Anzeigen, Systemausgaben und Bedienelemente), COOPER & STRAYER (2018) konnten während ei-
unterscheidet sich ebenfalls zwischen den Syste- ner Realfahrt mit einem teilautomatisierten Fahr-
men. Die Anzeige eines Lenkrads als Symbol für zeug eine verringerte physiologische Aktivierung
die Querführungsassistenz (Visualisierung der ver- der Fahrer sowie eine verschlechterte Reaktion auf
schiedenen Systemzustände, d. h. aktiv vs. Stand- eine periphere visuelle Entdeckungsaufgabe (PDT)
by, durch unterschiedliche Farbigkeit) wird weitge- messen, was sie als Out-of-the-Loop Phänomen in-
hend in allen Systemen verwendet. Zum Teil findet terpretierten.
eine Ergänzung durch die Visualisierung der er-
kannten Fahrstreifenmarkierung statt. Die Aktivität Hinsichtlich der Reaktion auf Systemgrenzen gibt
der Längsregelung wird häufig durch Querbalken es unterschiedliche Befunde dahingehend, wie gut
angezeigt, die gleichzeitig den eingestellten Folge- sie vom Fahrer gelöst werden können. In Notbrems-
abstand zu Vorderfahrzeugen kodieren. Ein voraus- situationen beispielsweise besteht im Vergleich
fahrendes Fahrzeug wird eingeblendet, wenn die- zum manuellen Fahren und assistierten Fahren mit
ses erkannt, oder wenn auf dieses geregelt wird. ACC die Gefahr, dass Fahrer mit teilautomatisier-
Neben der automatischen Quer- und Längsführung ten Systemen verzögert reagieren (STANTON,
bieten einige Hersteller auch eine integrierte Spur- YOUNG, WALKER, TURNER & RANDLE, 2001).
wechselassistenz an, die allerdings immer vom Auch bei SCHALLER, SCHIEHLEN & GRADEN
Fahrer initiiert und überwacht werden muss. In der EGGER (2008) zeigten sich verzögerte Reaktionen
Regel wird diese Assistenz durch Betätigung des in kritischen Situationen im Vergleich zum manuel-
Blinkers (z. B. Blinkerhebel muss länger gedrückt len Fahren, jedoch kam es mit Systemwarnung nie
gehalten werden) aktiviert. Daraufhin unterstützt zu Kollisionen. LARGE, BANKS, BURNETT, BA-
das System den Fahrer bei der Lenkung des Fahr- VERSTOCK & SKRYPCHUK (2017) fanden beim
zeugs auf den benachbarten Zielfahrstreifen. teilautomatisierten Fahren ein geringes Maß an
subjektiv wahrgenommenem Situationsbewusst-
sein sowie eine Beeinträchtigung der Leistung in
der primären Fahraufgabe (Spurhaltung) und der
1.2 Potenzielle Problembereiche des
sekundären Nebenaufgabe unmittelbar nach einer
teilautomatisierten Fahrens akustischen Übernahmesituation. De WINTER,
Teilautomatisierte Fahrfunktionen sollen den Fahr- STANTON, PRICE & MISTRY (2016) konfrontierten
komfort erhöhen, bringen aus Sicht der Human-Fac- Fahrer auf verschiedenen Automationsstufen (von
tors-Forschung jedoch spezielle Herausforderun- manuell bis hochautomatisiert) mit Situationen, die
gen mit sich, da dem Fahrer auf der einen Seite Tei- eine Fahrerreaktion erforderten. Auf besonders auf-
le der Fahraufgabe abgenommen werden, er je- fällige Reize (Stoppschilder, Fußgänger oder brem-
doch weiterhin in der Verantwortung der Fahrzeug- sendes Vorderfahrzeug) reagierten die Fahrer
führung bleibt und jederzeit bereit sein muss, in rechtzeitig, gerade bei geringen Geschwindigkeiten
zeitkritischen Situationen einzugreifen. hatten sie aber häufiger Probleme, auf einen unvor-
hersehbaren Systemausfall zu reagieren. Generell
In den oft zitierten „Ironies of Automation“ beschrieb führte eine fehlerbehaftete Automation zu hoher
LISANNE BAINBRIDGE (1983) schon in den 80er Frustration, während der physische Aufwand und
Jahren, dass der Mensch kein guter Überwacher die Beanspruchung sich verringerten. KIRCHER,
von Automationssystemen sei. Dies gilt besonders LARSSON & HULTGREN (2014) berichten hinge-
dann, wenn ihm in einem Mensch-Maschine-Sys- gen, dass Fahrer in Situationen, die das System er-
tem die Aufgabe zufällt, plötzlich eingreifen zu müs- wartungsgemäß nicht selbst bewältigen konnte,
sen, wenn die Automation an ihre Grenzen stößt. rechtzeitig die Kontrolle übernahmen. Auch NAU-
GREENLEE, DELUCIA & NEWTON (2018) fanden JOKS, PURUCKER & NEUKUM (2016) fanden in
heraus, dass das Fahren mit einem teilautomatisier- Realfahrstudien ebenfalls keine Beeinträchtigung
ten System zu einer Vigilanzminderung beiträgt, die der subjektiven und objektiven Sicherheit beim as-
zu einer Verschlechterung der Entdeckungsrate sistierten Fahren mit ACC vs. L2-System (im Ver-
von potenziellen Gefahren mit zunehmender Fahrt- gleich zum manuellen Fahren). KLEEN (2014)
dauer und zunehmender Anforderung an die Über- konnte in einer Realfahrstudie zeigen, dass die
wachungsleistung führt. Zudem waren die subjektiv Fahrer beim Fahren mit einem L2-System sehr gut
wahrgenommene Beanspruchung und das Stress- und verhältnismäßig zügig auf eine nicht zurückge-16
meldete Deaktivierung der Querführung, zum Bei- dauern auf das Display gar als potenziell sicher-
spiel an einer Baustelleneinfahrt oder in Kurvensze- heitsgefährdend in unerwarteten kritischen Situatio-
narien, mit einem Lenkeingriff reagierten. Auch sub- nen beurteilt. Ein sog. „Driver Safety Device“ (eine
jektiv bewerteten die Fahrer die Situationen als gut Art Totmann-Schalter, der nach Ablauf einer vorge-
beherrschbar. Allerdings geben die Autoren zu be- gebenen Zeit regelmäßig gedrückt werden musste)
denken, dass die Fahrer sich bewusst waren, an ei- führte im Vergleich zu einer schnelleren Reaktions-
ner Untersuchung teilzunehmen, was gegenüber fähigkeit (weil bereits eine Hand am Lenkrad gehal-
Alltagsfahrten eine höhere Aufmerksamkeit erwar- ten wurde), hatte aber keine positiven Auswirkun-
ten lässt. gen auf das Situationsbewusstsein (gemessen über
das SAGAT-Verfahren, siehe ENDSLEY, 1988).
Studien zeigen ebenfalls, dass Fahrer dazu neigen,
sich vermehrt Nebentätigkeiten zuzuwenden und Eine weitere Gefahr des teilautomatisierten Fah-
die Überwachung der Fahraufgabe zu vernachläs- rens besteht in der potenziellen Verwechslung mit
sigen, wenn sie durch die entstehende Monotonie höheren Automationsstufen. Endkonsumenten sind
aufgrund der Wegnahme der Fahrtätigkeit unter sich der immer noch währenden Verantwortung für
fordert sind (LLANERAS, SALINGER & GREEN, die Fahraufgabe bei der Nutzung dieser neuen
2013). GASPAR & CARNEY (2019) untersuchten in Technologien möglicherweise nicht bewusst, falls
einer Naturalistic Driving Studie das Blickverhalten diese nicht eindeutig als Fahrerunterstützung ge-
von Fahrern beim teilautomatisierten Fahren. Dabei kennzeichnet sind. Hersteller wie Tesla, die ihre teil
beobachteten sie, dass Fahrer eher bereit waren, automatisierte Fahrzeugfunktion unter dem Namen
einzelne, besonders lange Blickabwendungen von „Autopilot“ vermarkten, könnten dem Benutzer –
der Straße zuzulassen und ihre Aufmerksamkeit etwa aufgrund eines subjektiven Vergleichs mit Sys-
insgesamt länger auf Bereiche außerhalb der Fahr- temen aus der Luftfahrt – ein falsches Verständnis
bahn richteten als ohne Teilautomation. LOUW, über das tatsächliche Unterstützungsniveau des
KUO, ROMANO, RADHAKRISHNAN, LENNÉ & Systems und die eigene Verantwortlichkeit sugge-
MERAT (2019) konfrontierten Fahrer insgesamt rieren (IIHS, 2019) und ein übermäßiges Vertrauen
sechsmal in einer Simulationsstudie mit sog. „stil- in dessen Leistungsfähigkeit bewirken (siehe bei-
len“ Systemausfällen (d. h. ohne Rückmeldung an
spielsweise der Unfall eines Tesla mit einem Truck
den Fahrer) auf Geraden und in Kurven und stellten
im Mai 2016 in Florida; NTSB-Bericht, 2017). In den
dabei fest, dass die Fahrer, wenn sie durch eine vi-
Medien wurde in der Vergangenheit bereits von kriti-
suelle Nebenaufgabe zusätzlich abgelenkt waren,
schen Fahrsituationen und Unfällen mit teilautomati-
zwar alle Ausfälle bemerkten und auf diese reagier-
sierten Funktionen berichtet, die mit einem Fehlver-
ten, dabei aber verzögert übernahmen und häufiger
ständnis der Fähigkeiten der Automation in Zusam-
den Fahrstreifen verließen.
menhang zu stehen scheinen (BANKS, PLANT &
Darüber hinaus scheint die Gestaltung der System STANTON, 2018). Wissenschaftliche Untersuchun-
anzeigen wesentlich dazu beizutragen, inwieweit gen stützen diese Annahme (LLANERAS, SALIN-
diese als zusätzliche Ablenkung wirken. KRAFT, GER & GREEN, 2013; ABRAHAM, SEPPELT, MEH-
NAUJOKS, WÖRLE & NEUKUM (2018) konnten LER & REIMER, 2017; NAUJOKS, PURUCKER,
zeigen, dass ein kritischer Grad der Ablenkung WIEDEMANN, NEUKUM, WOLTER & STEIGER,
durch die Systemanzeigen bei einer angemesse- 2017). Aus Sicht potenzieller Nutzer teilautomati-
nen, d. h. reduzierten Gestaltung der MMS verhin- sierter Fahrfunktionen kommt für das Systemver-
dert werden kann. WULF, ZEEB, RIMINI-DÖRING, ständnis erschwerend hinzu, dass unter anderem in
ARNON & GAUTERIN (2013) untersuchten, ob den Medien verschiedene Bezeichnungen für sol-
spezifische Strategien der Mensch-Maschine-Inter- che L2-Funktionen kommuniziert werden. So wer-
aktion das Situationsbewusstsein des Fahrers und den die Begriffe „autonom“, „selbstfahrend“ und „tei-
dessen Fahrsicherheit verbessern können. Vorteil- lautomatisiert“ mitunter für dieselben teilautomati-
haft in Bezug auf ein erhöhtes Situationsbewusst- sierten Funktionen verwendet. Auch in der Wissen-
sein erwies sich ein Videobild, über das der Fahrer schaft gab es lange keine einheitliche Definition,
während der Beschäftigung mit einer visuellen Ne- obwohl die Forschung zur Mensch-Maschine-Inter-
benaufgabe die Fahrszenerie peripher beobachten aktion (MMI) im Kontext des automatisierten Fah-
konnte. Allerdings hatte diese Variante vernachläs- rens bis in die 90er Jahre des letzten Jahrhunderts
sigbare Auswirkungen auf die Fahrsicherheit und zurückgeht (z. B. DESMOND, HANCOCK & MO-
wurde von den Autoren durch die längeren Blick- NETTE, 1998). Zudem ist davon auszugehen, dass17
die wissenschaftliche Definition und Abgrenzung Fahraufgabe zeigte sich auch bei STANTON et
von Automationsstufen, wie z. B. die Klassifikation al. (2001). BEGIATTO, HARTWICH, SCHLEINITZ,
nach SAE (siehe Bild 1-1) den Verbrauchern nicht KREMS, OTHERSEN & PETERMANN-STOCK
geläufig ist. Eine Einweisung oder Erklärung der in (2015) berichten allerdings davon, dass im direkten
Fahrzeugen vorhandenen Assistenzsysteme findet Vergleich zwischen manuellem, teilautomatisiertem
außerdem nicht systematisch statt (ABRAHAM, und hochautomatisiertem Fahren das teilautomati-
MCANULTY, MEHLER & REIMER, 2018; CASNER sierte Fahren am anstrengendsten bewertet wurde,
& HUTCHINS, 2019), obwohl sich in der Literatur weil dort permanent überwacht werden muss (hö-
gezeigt hat, dass die Vorerfahrung und das Vorwis- here Anzahl an Kontrollblicken in die Spiegel und
sen über die automatisierte Fahrfunktion das Sys- auf das Kombi-Instrument-Display; ähnliche Befun-
temverständnis und die Art und Weise, wie Fahrer de auch von LARGE et al., 2017). Fahrer wünschen
mit der Automation interagieren, beeinflussen kön- sich hier insbesondere Informationen, die die Über-
nen (FORSTER, HERGETH, NAUJOKS, KREMS & wachung unterstützen (BEGGIATO et al., 2015).
KEINATH, 2019b; HERGETH, LORENZ & KREMS, STAPEL, MULLAKKAL-BABU & HAPPEE (2017)
2017; GOLD, KÖRBER, HOHENBERGER; LECH- konnten zeigen, dass die wahrgenommene Bean-
NER & BENGLER, 2015; KÖRBER; BASELER & spruchung von der Erfahrung mit derartigen Syste-
BENGLER, 2018; BEGGIATO & KREMS, 2013; men abhängt: Während Fahrer, die bereits Erfah-
ZHOU, ITOH & KITAZAKI, 2019). rung mit automatisierten Fahrzeugen gemacht ha-
ben, eine Reduktion des Workloads wahrnehmen,
Dabei kann die selbst erworbene Vorerfahrung mit
ist dieser Aspekt bei unerfahrenen Fahrern sogar
ähnlichen Systemen und Assistenzfunktionen eine
erhöht. Die Anforderungen an die visuelle Aufmerk-
Rolle spielen (WRIGHT, SAMUEL, BOROWSKI,
samkeit reduzierten sich während des Fahrens mit
ZILBERSTEIN & FISHER, 2016). Dies ist auch des-
Teilautomation im Vergleich zum manuellen Fahren
halb relevant, da vielen Fahrern oft nicht bewusst
nicht.
ist, über welche Funktionen sie in ihrem oder einem
geliehenen Fahrzeug verfügen, und sie deren Zusammenfassend zeigt sich für die Nutzung von
Funktionsweise durch Erfahrung im Umgang mit L2-Systemen eine relativ hohe Akzeptanz und Ver-
den Funktionen erlernen (VIKTOROVÁ & SUCHA, trauen. Der Fahrer nimmt zumindest in manchen
2018). Die Erfahrung von Systemgrenzen während Fahrsituationen, wie dem Fahren im Stau, eine Ent-
der Nutzung und die vorhandene Systemauslegung lastung wahr. Generell wird die Überwachungsauf-
(bspw. maximal möglicher Lenkwinkel oder Querbe- gabe aber als erschöpfend bewertet. Während der
schleunigung) des Systems kann das mentale Mo- Nutzung der Systeme besteht die Gefahr von er-
dell entscheidend beeinflussen (PRICE, VENKAT- höhter Ablenkung durch die Zuwendung zu anderen
RAMAN, GIBSON, LEE & MUTLU, 2016). Häufige- Tätigkeiten, aber auch durch die Systemanzeigen
re Systemausfälle führen beispielsweise zu stärke- selbst. Aktuell noch widersprüchliche Befunde gibt
rem Überwachungsverhalten und früherem Eingrei- es dazu, wie gut Fahrer an Systemgrenzen reagie-
fen im Falle einer Systemgrenze (SCHWARZ, GAS- ren. Es scheint, dass Fahrer eher dann keine Pro
PAR & BROWN, 2019). Das Vertrauen in die Funk- bleme erfahren, wenn Situationen antizipierbar
tion und damit die adäquate Verwendung kann sich sind, eine hohe Aufmerksamkeit auf der Fahrsituati-
ebenfalls auf das Eingreifen im Falle einer System- on liegt und das System zusätzlich eine Warnung
grenze auswirken(ZEEB, BUCHNER & SCHRAUF, ausgibt. Davon ist aber in L2-Systemen nicht immer
2015). auszugehen, da die Fahrer in der Lage sein müs-
sen, bei unerwarteten Situationen unmittelbar ein-
Im Kontrast zu den genannten Einschränkungen
zugreifen. Es gibt erste Anhaltspunkte dafür, dass
zeigt die empirische Forschung mit L2-Systemen je-
eine angemessene MMS-Gestaltung dies unterstüt-
doch ein hohes Vertrauen (KIRCHER et al., 2014)
zen kann. Die potenzielle Verwechslungsgefahr mit
sowie eine hohe Akzeptanz solcher Systeme, zu-
höheren Automationsstufen und damit einherge-
mindest bei geringen Geschwindigkeiten, wie bei-
hendem übermäßigen Vertrauen in teilautomatisier-
spielsweise im Stau, weil der Fahrer eine deutliche
tes Fahren muss durch die Vermittlung eines aus-
Entlastung erlebt (nachgewiesen sowohl über Be-
reichenden Systemwissens und eines angemesse-
fragung als auch über die Bereitschaft, die Querfüh-
nen mentalen Modells erfolgen.
rung im Stau dem System zu überlassen; SCHAL-
LER et al., 2008). Eine Verringerung der wahrge-
nommenen kognitiven Beanspruchung durch die18
1.3 Bewertungsmethoden: Experten- verschiedene Prüfkriterien und Prüfverfahren für
bewertung und Nutzerstudie eine effiziente und sichere MMI definiert sind.
Vor dem Hintergrund der dargestellten zu erwarten- In der Usability-Forschung werden im Rahmen des
den Probleme im Umgang mit teilautomatisierten Produktentwicklungszyklus zur Bewertung von As-
Systemen ist zu fordern, dass abgesichert werden pekten der MMS zwei grundsätzliche Ansätze vor-
sollte, ob Nutzern von teilautomatisierten Systemen geschlagen (NIELSEN, 1994):
ein adäquates Verständnis der Automation vermit-
• Die expertenbasierte Bewertung durch Human-
telt wird. Ziel ist die Entwicklung einer ganzheit
Factors Spezialisten (z. B. im Rahmen einer
lichen Methode, die unabhängig von verschiede-
heuristischen Evaluation, d. h. der Sammlung
nen Systemausgestaltungen Aussagen über die
von potenziell auftretenden Problemen durch
Gebrauchstauglichkeit (engl. Usability) und Ge-
selbstständiges Erproben und/oder anhand von
brauchssicherheit machen kann. Während erste
bestehenden Guidelines und Ableitung eines
Ansätze zur Überprüfung der Gebrauchstaug
Expertenurteils) und
lichkeit für hochautomatisiertes Fahren (SAE L3;
NHTSA, 2017; NAUJOKS, HERGETH, WIEDE- • die empirische Bewertung, d. h. die Durchfüh-
MANN, SCHÖMIG, FORSTER & KEINATH, 2019a; rung einer Nutzerstudie mit einer repräsentati-
NAUJOKS, WIEDEMANN, SCHÖMIG, HERGETH ven Stichprobe potenzieller Endnutzer des Sys-
& KEINATH, 2019c) sowie der Kontrollierbarkeit tems (NIELSEN & MOLICH, 1990).
(NAUJOKS, WIEDEMANN, SCHÖMIG, JAROSCH
& GOLD, 2018a, sog. TOC-Rating) bereits existie- Die Methoden ergänzen sich in optimaler Weise
ren, gibt es bisher noch keine standardisierte und darin, Usability- und Verständnisprobleme aufzu
ganzheitliche Bewertungsmethodik dieser Aspekte decken, die in der Interaktion mit dem Produkt
von Fahrzeugen mit teilautomatisierten Fahrfunktio- über die MMS bestehen (JEFFRIES & DESURVIRE
nen. Diesbezüglich müssen Ansätze entwickelt 1992). Während die Bewertung durch Experten
werden, mit deren Hilfe geprüft werden kann, ob die in der Lage ist, potenzielle Probleme in einem frü-
MMS die Voraussetzungen für eine sichere und hen Entwicklungsstadium zu identifizieren, und ein-
dem Automationslevel angemessene Interaktion er- fach anzuwenden ist, ist die Nutzerstudie in der Re-
füllt, sodass Fahrer dementsprechend mit den Fahr- gel besser dafür geeignet, reale Probleme in der
zeugen umgehen können. tatsächlichen Nutzung des Produkts aufzudecken,
wobei sie allerdings wesentlich aufwendiger in
Zum einen ist hierbei zu bewerten, inwieweit die der Planung und Durchführung ist. Nachdem die
MMS geeignet ist, den Fahrer beim Verständnis der beiden Methoden unterschiedliche Arten von
Systemfunktionalität und einem sicheren Umgang Usability-Aspekten aufdecken, ist es empfehlens-
mit Systemgrenzen zu unterstützen. Hierzu müssen wert, beide Methoden im Rahmen eines umfassen-
entsprechende Mindestanforderungen an die Ge- den Bewertungskonzepts einzusetzen (JEFFRIES,
staltung der MMS von automatisierten Systemen MILLER WHARTON & UYEDA, 1991; IS0 9241
definiert werden (NAUJOKS, 2019c). Darüber hi 2018).
naus ist zu prüfen, inwieweit der Fahrer in der direk-
ten Interaktion mit dem System die ihm dargebote- Als Methode für die Bewertung der MMI von L3-
nen Informationen verstehen und effektiv und sicher Fahrfunktionen haben NAUJOKS et al. (2019a) sich
nutzen kann (NAUJOKS, HERGETH, WIEDE- bereits auf dieses Vorgehen verständigt und einen
MANN, SCHÖMIG & KEINATH, 2019b). Es sollte zweistufigen, konsekutiven Bewertungsansatz vor-
sichergestellt sein, dass der Fahrer über ein ausrei- geschlagen. Als heuristische Evaluation empfehlen
chendes Maß an Systemverständnis, System- und die Autoren die Anwendung einer Checkliste durch
Situationsbewusstsein verfügt und dabei nicht in Human Factors Experten, anhand derer die Erfül-
übermäßigem Grad beansprucht wird. Für diese lung von bestehenden Standards und Guidelines
Fragen ist die Beobachtung der Interaktion des Nut- einer MMS überprüft werden kann. Zusätzlich wird
zers mit dem System und der MMS notwendig. ein Testprotokoll für Nutzertest im Fahrsimulator
vorgestellt. In Anlehnung an diese Vorgehensweise
Das übergeordnete Ziel ist die Entwicklung eines werden die folgenden zwei Bausteine für eine Ge-
umfassenden, standardisierten Bewertungskon- samtbewertung von teilautomatisierten Fahrfunktio-
zepts für MMS beim automatisierten Fahren, in dem nen vorgeschlagen.Sie können auch lesen