Spannungsfeld hochautomatisiertes Fahren - zwischen Euphorie und Ablehnung - Deutsche Messe
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
DLR.de • Folie 1 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Spannungsfeld hochautomatisiertes Fahren –
zwischen Euphorie und Ablehnung
Prof. Dr.-Ing. Karsten Lemmer
Deutsches Zentrum für Luft- und Raumfahrt e.V.
Institut für Verkehrssystemtechnik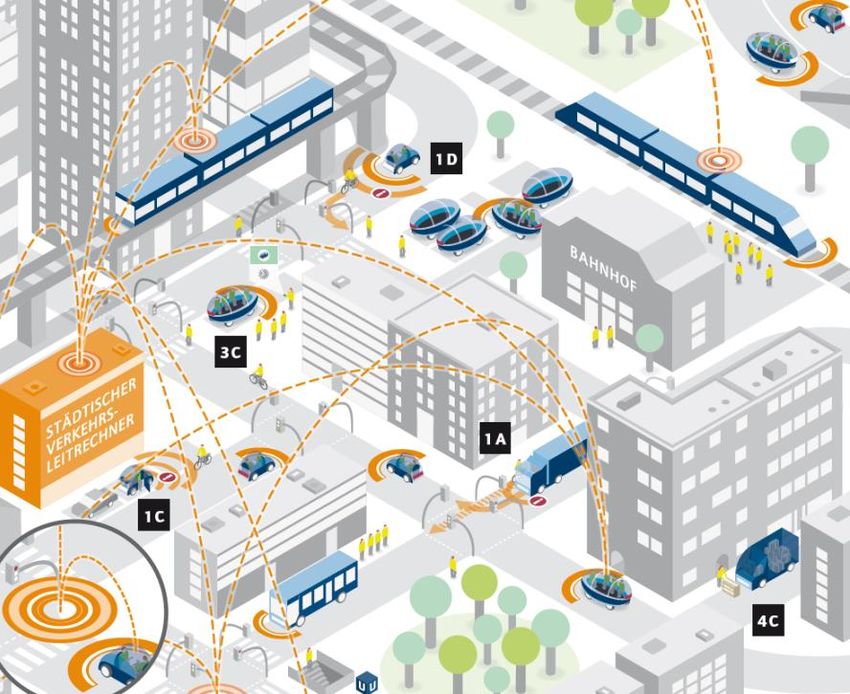
DLR.de • Folie 2 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016 Die Frage ist nicht, ob wir in Zukunft automatisiert fahren – sondern wie wir Automation im Straßenverkehr für den Menschen nutzen und gestalten.
DLR.de • Folie 3 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Herausforderungen für unser Mobilitätssystem
Verkehrs- • Bevölkerungswachstum, Urbanisierung und Zunahme des
stau Güterverkehrs
• 38 Stunden verbringt jeder Autofahrer/-in jährlich im Stau
Umwelt- • 18 Prozent des CO² Ausstoßes durch Verkehr
belastung • 1,3 kg CO²-Emissionen pro Parkplatzsuche
Unfälle • 3.475 Getötete und 393.744 Verletzte im Straßenverkehr
• 88 Prozent der Unfälle durch Fehler des Fahrzeugführers
Mobilität • Demografie: bis 2030 steigt der Anteil der über 65-
im Alter Jährigen in unserer Gesellschaft von heute 21 Prozent auf
27,5 Prozent
Digitali- • individueller, intermodaler, effizienter durch Information &
sierung Kommunikation
• Geschäftsmodelle: von produkt- zu nutzerorientiert
Alle Angaben für Deutschland. Quellen: Verkehr in Zahlen 2015/2016; Centre for Economics and Business Research 2014; APCOA PARKING Parkplatzstudie 2013; Ergebnisse der 13.
koordinierten Bevölkerungsvorausberechnung, Statistisches Bundesamt; Darstellung: v.a. acatech; Bilder: shutterstock.com: Khongkit Wiriyachan, Vinogradov Illya, OliverSved, Andresr
DLR.de • Folie 4 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Automatisiertes und vernetztes Fahren verfügt über
große Potentiale, unsere Mobilität vielfältig zu optimieren
Freiräume
schaffen für Seriennahe
„Digital Technik
Natives“ verfügbar
Alternder
Entspannt Gesellschaft
reisen gerecht
werden
Staus
vermeiden
durch
Fahrstrategie
Unfälle Stressfrei
verhindern Parken in
Städten
Emissionen Wirtschafts-
reduzieren standort
durch Deutschland
Fahrstrategie stützen
DLR.de • Folie 5 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Schritt für Schritt zu mehr Automatisierung
Definition der Automatisierungsgrade
Driver only Assistiert Teilautomatisiert Hochautomatisiert Vollautomatisiert Fahrerlos
FAHRER
Fahrer führt Fahrer führt Fahrer muss Fahrer muss Kein Fahrer Von Start bis Ziel kein
dauerhaft Längs- dauerhaft Längs- System dauerhaft System nicht erforderlich im Fahrer erforderlich
und Querführung oder Querführung überwachen. dauerhaft über- spezifischen
aus. aus. wachen. Fahrer Anwendungsfall
muss potentiell in
der Lage sein zu
übernehmen.
System übernimmt
Längs- und
AUTOMATISIERUNG
Querführung in
spezifischem
Anwendungsfall*. System übernimmt
Es erkennt System- System kann im Fahraufgabe
System übernimmt grenzen und fordert spezifischen vollumfänglich bei
Längs- und Fahrer zur Anwendungsfall* allen Straßentypen,
System übernimmt Querführung in Übernahme mit alle Situationen Geschwindigkeits-
Kein eingreifendes die jeweils andere spezifischem ausreichender automatisch bereichen und
Fahrzeugsystem aktiv Funktion. Anwendungsfall. Zeitreserve auf. bewältigen. Umfeldbedingungen
Nomenklatur gemäß VDA. *Anwendungsfälle beinhalten Straßentypen, Geschwindigkeitsbereiche und Umfeldbedingungen
DLR.de • Folie 6 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Schritt für Schritt zu mehr Automatisierung
Definition der Automatisierungsgrade
Driver only Assistiert Teilautomatisiert Hochautomatisiert Vollautomatisiert Fahrerlos
FAHRER
Fahrer führt Fahrer führt Fahrer muss Fahrer muss Kein Fahrer Von Start bis Ziel kein
dauerhaft Längs- dauerhaft Längs- System dauerhaft System nicht erforderlich im Fahrer erforderlich
und Querführung oder Querführung überwachen. dauerhaft über- spezifischen
aus. aus. wachen. Fahrer Anwendungsfall
muss potentiell in
der Lage sein zu
Nächste
übernehmen. Neue
Heutige
Generation Handlungsfelder
Fahrerassistenz-
Fahrerassistenz- für Assistenz &
Systeme
Systeme Automation
System übernimmt
Längs- und
AUTOMATISIERUNG
Querführung in
spezifischem
Anwendungsfall*. System übernimmt
Es erkennt System- System kann im Fahraufgabe
System übernimmt grenzen und fordert spezifischen vollumfänglich bei
Längs- und Fahrer zur Anwendungsfall* allen Straßentypen,
System übernimmt Querführung in Übernahme mit alle Situationen Geschwindigkeits-
Kein eingreifendes die jeweils andere spezifischem ausreichender automatisch bereichen und
Fahrzeugsystem aktiv Funktion. Anwendungsfall. Zeitreserve auf. bewältigen. Umfeldbedingungen
gesetzlich geregelt gesetzlich nicht geregelt
Nomenklatur gemäß VDA. *Anwendungsfälle beinhalten Straßentypen, Geschwindigkeitsbereiche und Umfeldbedingungen
DLR.de • Folie 7 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Schritt für Schritt zu mehr Automatisierung
Definition der Automatisierungsgrade
Driver only Assistiert Teilautomatisiert Hochautomatisiert Vollautomatisiert Fahrerlos
Fahrer führt Fahrer führt Fahrer muss Fahrer muss Kein Fahrer Von Start bis Ziel kein
dauerhaft Längs- dauerhaft Längs- System dauerhaft System nicht erforderlich im Fahrer erforderlich
und Querführung oder Querführung überwachen. dauerhaft über- spezifischen
aus. aus. wachen. Fahrer Anwendungsfall
Runder Tisch
muss potentiell in
der Lage sein zu
Automatisiertes Fahren
übernehmen.
System übernimmt
Längs- und
Querführung in
spezifischem
Anwendungsfall*. System übernimmt
Es erkennt System- System kann im Fahraufgabe
System übernimmt grenzen und fordert spezifischen vollumfänglich bei
Längs- und Fahrer zur Anwendungsfall* allen Straßentypen,
System übernimmt Querführung in Übernahme mit alle Situationen Geschwindigkeits-
Kein eingreifendes die jeweils andere spezifischem Perspektive 2020
ausreichender automatisch bereichen und
Fahrzeugsystem aktiv Funktion. Anwendungsfall. Zeitreserve auf. bewältigen. Umfeldbedingungen
Bild: Fotolia / cherezoff
DLR.de • Folie 8 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Schritt für Schritt zu mehr Automatisierung
Definition der Automatisierungsgrade
Driver only Assistiert Teilautomatisiert Hochautomatisiert Vollautomatisiert Fahrerlos
Fahrer führt Fahrer führt Fahrer muss Fahrer muss Kein Fahrer Von Start bis Ziel kein
dauerhaft Längs- dauerhaft Längs- System dauerhaft System nicht erforderlich im Fahrer erforderlich
und Querführung oder Querführung überwachen. dauerhaft über- spezifischen
aus. aus. wachen. Fahrer Anwendungsfall
muss potentiell in
der Lage sein zu
übernehmen.
System übernimmt
Längs- und
Querführung in
spezifischem
Anwendungsfall*. System übernimmt
Es erkennt System- System kann im Fahraufgabe
System übernimmt grenzen und fordert spezifischen vollumfänglich bei
Längs- und Fahrer zur Anwendungsfall* allen Straßentypen,
System übernimmt Querführung in Übernahme mit alle Situationen Geschwindigkeits-
Kein eingreifendes die jeweils andere spezifischem ausreichender Perspektive 2030
automatisch bereichen und
Fahrzeugsystem aktiv Funktion. Anwendungsfall. Zeitreserve auf. bewältigen. Umfeldbedingungen
DLR.de • Folie 9 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016 Kernfrage: Wie können wir Technik für den Menschen nutzbar machen und gestalten?

DLR.de • Folie 10 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Runder Tisch Automatisiertes Fahren
Erarbeitung deutscher Position für 2020 im Auftrag des BMVI
Definition realistischer Einsatzszenarien und strategischer Eckpunkte bis 2020
Basis für nationale Strategie Automatisiertes Fahren bis 2020
Konzeption des Programms Automatisiertes Fahren 2020
Beteiligte: u.a. BMVI, VDA, BASt, GDV, DVR, VDIK, ADAC, DLR, Dekra, VdTÜV, FZD/TU Darmstadt
Einsatzszenarien:
Autobahn Parkhaus
(strukturiertes, weniger komplexes Verkehrsumfeld) (strukturiertes, komplexes Verkehrsumfeld)
• zuerst hochautomatisiertes Fahren bei Staufolge- • Parken und Rangieren, d. h.
fahrten durch Autobahn-Stau-System (max. 60 km/h) vollautomatisiertes Fahren in definierten
• später hochautomatisiertes Fahren bei Lang- Parkumgebungen durch Parkhaus-
streckenfahrten durch Autobahn-System (max.130km/h) System (geringe Geschwindigkeiten)
• Bereitstellung von Funktionsausprägungen erfolgt
situationsbedingt (z.B. Fahrstreifenwechsel)
Entlastung bei beanspruchenden, ermüdenden Zugewinn an nutzbarer Lebenszeit
Fahraufgaben
Bild: Fotolia / cherezoffDLR.de • Folie 11 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
acatech-Projekt Neue autoMobilität
Zielbild automatisierter Straßenverkehr 2030
• Bedürfnisse der Nutzer stehen im Mittelpunkt
• Service-orientierte Geschäftsmodelle: Mobility-as-a-Service
• Mischverkehr aus nicht-automatisierten, teil-automatisierten und fahrerlosen
Fahrzeugen
• Multimodales Verkehrssystem
• verknüpfte Themen: Mensch-Maschine-Interaktion, Vernetzung, Smart City,
IT-Sicherheit, Datenschutz etc.
Disziplin- und branchenübergreifendes Zielbild als Baustein für eine
gemeinsame
2016 Strategie von Politik, Wirtschaft2025
2020 und Wissenschaft 2030
Analyse zum
Status Quo &
internationaler Vergleich
Infos und POSITION unter www.acatech.de/neue-automobilitaet Quelle: acatechDLR.de • Folie 12 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Anwendungsbeispiel „ Autobahn-Pilot“
Zeithorizont 2020-2025
• Beteiligte:
nicht-automatisierte und automatisierte Fahrzeuge
• Situation:
Fahrzeug im Mischverkehr auf der Autobahn.
• Die Steuerung des Fahrzeuges wird auf der Autobahn
vollständig durch den Autobahn-Piloten
übernommen. Durch Sensorik und kooperatives
Fahren bilden automatisierte Fahrzeuge Platoons.
• Nutzen:
Der Fahrer gewinnt Zeit für andere Tätigkeiten.
Der Straßenraum wird effizienter genutzt und der Verbrauch der Platooning-
Teilnehmer verringert sich.DLR.de • Folie 13 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Anwendungsbeispiel „ÖV-Shuttle“ auf dem Land
Zeithorizont 2030+
• Beteiligte:
Renter/-in aus der ländlichen Region
• Situation:
Viele Senioren fahren im höheren Alter nicht mehr
gerne mit dem eigenen Pkw, möchten aber
trotzdem am gesellschaftlichen Leben teilnehmen.
• Das ÖV-Shuttle ermöglicht es, auch ohne eigenen
Pkw kostengünstig und flexibel mobil zu sein.
• Nutzen:
Älteren Menschen wird der Zugang zur Versorgung und zum kulturellen
Angebot erleichtert. Davon profitieren auch Unternehmen in der Region.
Zugleich wird die Attraktivität der Lebensqualität im ländlichen Raum gesteigert.DLR.de • Folie 14 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Dimensionen einer systemischen Roadmap
zur Erreichung des Zielbildes
Mensch-Maschine-Interaktion
Fahrermodelle
Verhaltenspflicht Mensch Akzeptanz
Haftung
Regelung Testbetrieb
Technische Standards Automation
Handelsbarrieren Rahmen- Vernetzung
Fin. Rahmenbedingungen beding- Fahrzeug Umfeldwahrnehmung
ungen
Bildung & Qualifikation
Logistik/ÖPNV
(Funktionale Sicherheit) Architektur
Safety Digitale Karten
Safety & Vernetztes
Security Mobilitäts- Technische Infrastruktur
Privacy/Datenschutz Security
system Verkehrsmanagement
Quelle: acatechDLR.de • Folie 15 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Vernetzung und Automatisierung
müssen zusammen gedacht werden!
Automatisierung ist ohne Vernetzung zwar möglich,
• aber für den vernetzten Menschen der Zukunft ist sie selbstverständlich!
• und sie generiert einen zusätzlicher Mehrwert:
• flexible Anpassung von Route oder
Fahrstrategie durch Echtzeit-Verkehrs-
informationen (z.B. Staumeldungen,
Unfallwarnungen)
• verbesserte Entscheidungen bei
Steuerung und Navigation sowie größere
Robustheit der Steuerungssysteme
• Verknüpfung mit anderen Verkehrsträgern
(ÖPNV, Carsharing etc.) zu intermodalen
ReisekettenDLR.de • Folie 16 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016 Wie gut muss Automation sein? Wie testen wir das? BMWi-Projekt PEGASUS: von Prototypen zu Produkten • Schließen der Lücken in den Bereichen Testen und Freigabe automatisierter Fahrzeuge • Entwicklung zentraler Elemente einer Werkzeugkette zur Absicherung automatisierter Fahrzeuge (am Beispiel der hochautomatisierter Fahrfunktion „Autobahn-Chauffeur“) • generell akzeptierte Kriterien statt herstellerspezifischen Vorgehens Paradigmenwechsel: von Forschung und Entwicklung zu konkreten Zulassungsbedingungen!
DLR.de • Folie 17 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016 Tests unterstützen menschzentrierte Entwicklung und technische Absicherung automatisierten, vernetzen Fahrens • Tests und Erprobungen in Simulation und im Realverkehr sind für eine sichere und effiziente Entwicklung von automatisierten und vernetzten Fahrzeugen unerlässlich • Dazu benötigen wir u.a. Fahrsimulatoren, Verkehrssimulationen, Testfahrzeuge, Teststrecken, Testfelder (z.B. Testfeld A9, Anwendungsplattform Intelligente Mobilität [AIM], Testfeld Niedersachsen)
DLR.de • Folie 18 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Der Traum vom automatisierten Fahren ist alt –
jetzt ist er zum Greifen nah! Gestalten wir ihn jetzt –
mit und für die Menschen unserer Zeit.
www.retro-futurismus.de, Günter Radtke, 1974DLR.de • Folie 19 > Spannungsfeld hochautomatisiertes Fahren – zwischen Euphorie und Ablehnung > Prof. Dr.-Ing. Karsten Lemmer > 25.04.2016
Spannungsfeld hochautomatisiertes Fahren –
zwischen Euphorie und Ablehnung
Prof. Dr.-Ing. Karsten Lemmer
Deutsches Zentrum für Luft- und Raumfahrt e.V.
Institut für VerkehrssystemtechnikSie können auch lesen

















































