SmartRTK: Präzise Positionsdaten und mobile Geodatenerfassung mit Low-Cost-GNSS eine Prototypenentwicklung für hochalpine Einsätze - gis.Point
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Full Paper 161 SmartRTK: Präzise Positionsdaten und mobile Geodatenerfassung mit Low-Cost-GNSS − eine Prototypenentwicklung für hochalpine Einsätze SmartRTK: Precise Positioning and Geospatial Data Acquisition with Low Cost GNSS − A Prototype Development for High Alpine Operations Marco Gabl1, Armin Heller1 1Universität Innsbruck · marco.gabl@protonmail.com Zusammenfassung: Für Vermessungsaufgaben zur Dokumentation von Gletscherständen und zur Bi- lanzierung des Massenhaushaltes sind zentimetergenaue Messdaten notwendig. Mit den eingesetzten Real-Time-Kinematic-(RTK-)fähigen Low-Cost-GNSS sind Messungen im geforderten Genauigkeits- bereich möglich. Die Kombination aus anwenderfreundlicher Software und preisgünstiger GNSS-Hard- ware sind eine ideale Basis, um für die Anforderungen hochalpiner Arbeitsgebiete einen „SmartRTK“- Prototypen zu entwickeln. „SmartRTK“ ist eine kompakte, robuste und leichte Receiver-Antennen Ein- heit, mit der die RTK-Position auf das Smartphone übertragen werden kann. Schlüsselwörter: Low-Cost-GNSS, RTK, mobiles GIS, Prototype, Gletschervermessung Abstract: For surveying tasks to document glacier levels and to evaluate the mass balance, measure- ment data with centimeter accuracy is required. With the RTK (Real Time Kinematic) − capable low cost GNSS in use, measurements in the required accuracy range are possible. The combination of user- friendly software and low cost GNSS hardware is an ideal basis to develop a “SmartRTK” prototype for the requirements of high alpine working areas. “SmartRTK” is a compact, robust and lightweight receiver-antenna unit that can transmit the RTK position to the smartphone. Keywords: Low Cost GNSS, RTK, mobile GIS, prototype, glacier surveying 1 Einleitung Mit der steigenden Leistungsfähigkeit von kostengünstigen externen GNSS-Multifrequenz- empfängern in Verbindung mit smarten GIS-App Lösungen besteht die Möglichkeit, maßge- schneiderte und intuitiv zu handhabende Anwendungen zu konfigurieren. GNSS-basierte Sy- steme zur Geodatenerfassung haben in den letzten Jahren eine sichtbare Weiterentwicklung erfahren. Selbst für GIS-basierte Fragestellungen kann ein Genauigkeitsanspruch im Zenti- meterbereich gefordert sein (Brand et al., 2017). Angesichts dessen wird in diesem Beitrag die Qualität der Positionsdatenaufzeichnung von Low-Cost-GNSS-Empfängern (Emlid Reach) untersucht. Die Evaluierung der horizontalen und vertikalen Lagegenauigkeit der Low-Cost- Sensoren folgt im direkten Vergleich mit einem geodätischen High-End-Receiver (Trimble R10). Neben den getesteten Emlid-Reach-Receivern sind mehrere kostengünstige RTK-fähige GNSS-Empfänger erhältlich. Tabelle 1 zeigt einen Auszug über gängige Low-Cost-RTK- Systeme. Im unteren Preissegment sind es zumeist Geräte, die mit einem Chipsatz der Marke u-blox ausgestattet sind. Aufgrund der geeigneten Systemarchitektur und der integrierten, AGIT ‒ Journal für Angewandte Geoinformatik, 7-2021, S. 161-169. © Wichmann Verlag, VDE VERLAG GMBH · Berlin · Offenbach. ISBN 978-3-87907-707-6, ISSN 2364-9283, eISSN 2509-713X, doi:10.14627/537707018. Dieser Beitrag ist ein Open-Access-Beitrag, der unter den Bedingungen und unter den Auflagen der Creative Commons Attribution Lizenz verbreitet wird (http://creativecommons.org/licenses/by-nd/4.0/).
162 AGIT – Journal für Angewandte Geoinformatik · 7-2021
umfassenden Steuerungssoftware ReachView, wurden Empfänger von Emlid in der vorlie-
genden Arbeit verwendet und für den Bau eines Prototypen als Basis eingesetzt.
Tabelle 1: Übersicht gängiger Low-Cost-RTK-Systeme (eigene Darstellung)
Hersteller Typ GNSS-Modul Single Frequency Multi Frequency
Emlid Reach M+/RS+ u-blox M8T x
Emlid Reach M2/RS2 u-blox Zed-F9P x
Navspark PX1122R-EVB SkyTraq PX1122R x
Ardusimple SimpleRTK2B u-blox Zed-F9P x
Sparkfun GPS-RTK-2 u-blox Zed-F9P x
Drotek Sirius u-blox Zed-F9P x
Drotek DP0503 RTK- u-blox M8P-2
x
GNSS
Die Möglichkeit verschiedene Messmethoden (RTK, PPK) für zentimetergenaue Positions-
bestimmungen anzuwenden, die kompakte Bauform der Receiver sowie die einfache Steue-
rung der Sensoren mittels mobiler Endgeräte dienten als Grundbausteine, um eine für hoch-
alpine Einsätze konzipierte Kombination von externem RTK-GNSS und Smartphone zu ent-
wickeln. Vor diesem Hintergrund wurden in den durchgeführten Feldversuchen zur Vermes-
sung des Eiskargletschers in den Karnischen Alpen die geeigneten Messmethoden eruiert,
sowie adäquate Hard- und Softwarespezifikationen zur Prototypenentwicklung ausgearbeitet.
Neben der bereits angeführten auf GNSS basierenden Variante zur Kartierung von Gletscher-
ständen, können Einzelpunktmessungen auch mittels einer Totalstation (Tachymeter) durch-
geführt werden. Für detailliertere Analysen, wo auch kleinräumige Veränderungen im Zen-
timeterbereich erfasst werden, findet terrestrisches Laserscanning (TLS) oder luftgestütztes
Laserscanning (ALS) Anwendung. Ebenso werden Drohnen (UAVs) zur photogrammetri-
schen, flächenhaften Vermessung an Gletschern eingesetzt.
Der vorliegende Beitrag befasst sich mit der Fragestellung, ob die preisgünstigen GNSS-
Empfänger den zur Ermittlung der Winter- bzw. Sommerbilanz von Gletschern nötigen Ge-
nauigkeitsanspruch im Zentimeterbereich aufweisen. Dazu wurden im Vorfeld methodische
Testreihen in unterschiedlichen Umgebungsbedingungen durchgeführt. Neben der reinen
GNSS-gestützten Erhebung der Positionsdaten, fließen Überlegungen zur Umsetzung einer
softwaregestützten Geländeaufnahme mit ein, die dem vertrauten Gebrauch von Smartpho-
nes bzw. Tablets entspricht. Auf diese Weise entsteht die Möglichkeit, Geodaten nicht nur
auf reiner Expertenebene zu erfassen, sondern auch einer breiteren Nutzergruppe zugänglich
zu machen. Abschließend wird am Beispiel einer eigenständigen Entwicklung das Projekt
„SmartRTK“ vorgestellt.
2 Hardware, Messmethoden und Positionsgenauigkeit
Um die Position mit GNSS-Empfängern zu berechnen, gibt es verschiedene Methoden und
Ansätze. Welche Technik Anwendung findet, hängt von der geforderten Genauigkeit als auch
vom Typ des GNSS-Empfängers ab. Die messtechnische Herausforderung zur Erfassung
wichtiger Basispunkte an Gletschern sind untrennbar mit einem sehr hohen Genauigkeitsan-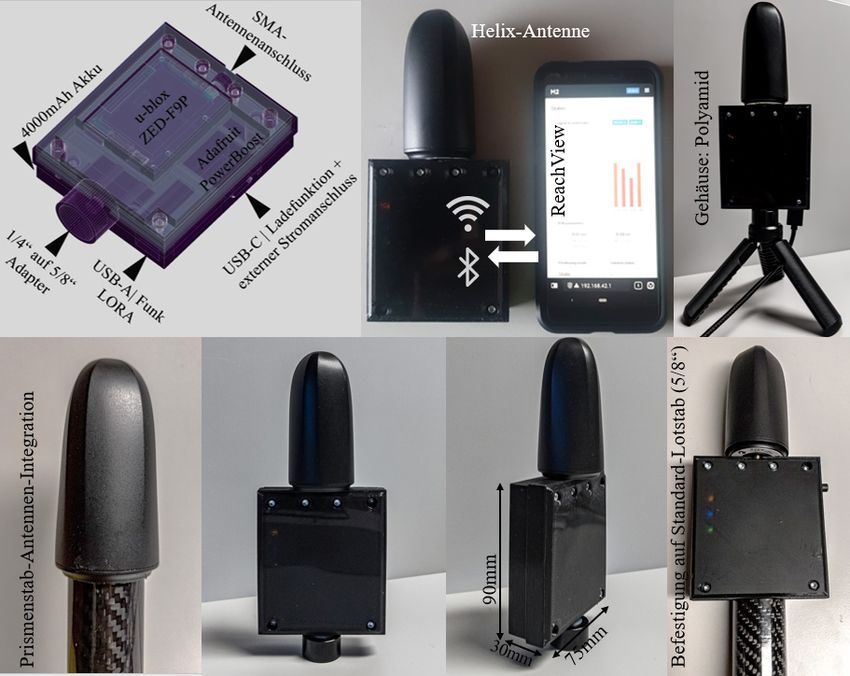
M. Gabl, A. Heller: Präzise Positionsdaten und mobile Geodatenerfassung 163
spruch verbunden. Dazu zählen etwa Profilmessungen zur Abschätzung der höhenzonalen
Eisdickenänderung, das Einmessen von Pegelnetzen oder die Definition von Referenzpunk-
ten. Dafür sind RTK- bzw. PPK-gestützte Positionierungsmethoden erforderlich. Die nach-
folgenden Receiver-Spezifikationen und Vergleichsmessungen mit dem geodätischen Refe-
renz-GNSS geben einen ersten Aufschluss über die Tauglichkeit der verwendeten Low-Cost-
Empfänger.
2.1 Low-Cost- vs. High-Cost-GNSS
Wie in vielen RTK-fähigen Receivern des Low-Cost-Segments, sind auch in den angeführten
GNSS-Empfängern von Emlid, Chipsätze des Schweizer Unternehmens u-blox verbaut. So-
wohl für die Variante der Singlefrequenz-Receiver (u-blox M8T) als auch für die Mehrfre-
quenz-Empfänger (u-blox ZED-F9P) sind laut Herstellerangaben Positionslösungen im Zen-
timeterbereich möglich (u-blox, 2021). Technologisch haben Multifrequenz-GNSS mehrere
Vorteile, wie eine stark verkürzte Initialisierungszeit (Time to First Fix) zur Auflösung der
Mehrphasendeutung oder längere Basislinien im Bereich von bis zu 60 km, anstelle von
10 km bei Einfrequenz-Empfängern (RTK-Modus). Ein weiterer Vorteil von Multi-Band-
Receivern ist eine verbesserte Signalrobustheit, vor allem bei schwierigeren Messbedingun-
gen (Emlid Ltd., 2021)
Zur Überprüfung, welche Variante sich in Bezug zu den Anschaffungskosten am besten eig-
net, wurden beide Receivertypen mehrfach getestet (Kap. 2.2). Tabelle 2 zeigt die wichtig-
sten technischen Unterschiede der Emlid Low-Cost-Geräte im Vergleich mit dem für die
Referenzmessungen eingesetzten High End Empfänger Trimble R10.
Tabelle 2: Vergleich der Hardware-Spezifikationen (Daten: Emlid Ltd. & Trimble)
Emlid Reach RS+/M+1 Emlid Reach RS2/M22 Trimble R10 V1
M8T Single Frequency ZED-F9P Multi
Frequency
Messung GPS/QZSS: L1C/A GPS/QZSS L1C/A, L2C GPS: L1C/A, L1C, L2C,
GLONASS L10F GLONASS L1OF, L2OF L2E, L5 GLONASS:
GNSS-Signal
Galileo E1, BeiDou B1 BeiDou B1, B2 L1C/A, L1P, L2C/A, L2P,
SBAS Galileo E1, E5b L3 Galileo: E1, E5a, E5b
BeiDou: B1, B2
SBAS
Kanäle 72 184 672
statisch 5 mm+1 ppm (H)* 4 mm+0,5 ppm (H)* 3 mm+0,1 ppm (H)*
Positio-
nierung
10 mm+2 ppm (V)* 8 mm+1 ppm (V)* 3,5 mm+0,4 ppm (V)*
RTK 7 mm+1 ppm (H)* 7 mm+1 ppm (H)* 8 mm+0,5 ppm (H)*
14 mm+2 ppm (V)* 14 mm+1 ppm (V)* 15 mm+0,5 ppm (V)*
Gewicht 690 g 35 g1 950 g 35 g2 1.120 g
kationen
Spezifi-
Speicher 8 GB 16 GB 6 GB
Akku 30 h Extern1 22 h Extern2 6,5 h
Preis [$] ~ 799.- ~ 2651.- ~ 1.899.- ~ 4492.- ~ 25500.-
(H)* horizontale Genauigkeit (V)* vertikale Genauigkeit164 AGIT – Journal für Angewandte Geoinformatik · 7-2021
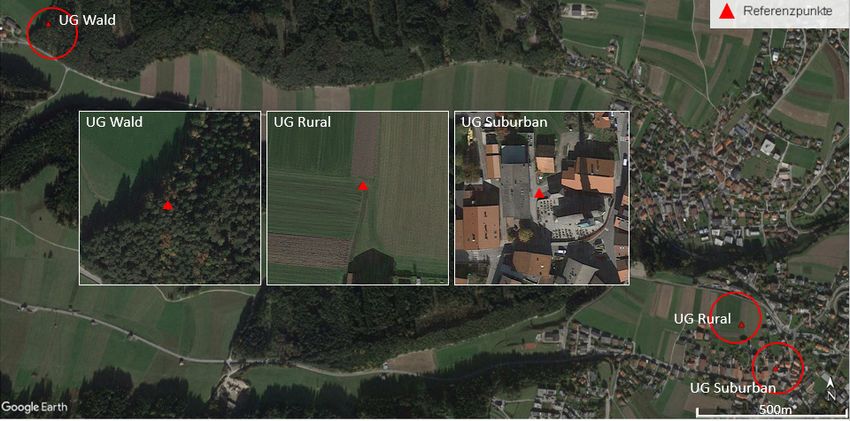
2.2 Messkampagnen
Die Vergleichsmessungen wurden an einem Standort mit uneingeschränkter Sicht zum Him-
mel und optimalen Messbedingungen (UG Rural) sowie inmitten eines dicht verbauten Sied-
lungsgebietes (UG Suburban) erhoben. Die Messungen am Waldstandort (UG Wald) stellen
aufgrund der Abschattungen ein Maximum an Störeinflüssen aller Testmessungen dar. Zu-
sätzlich wurde im UG Wald die Lageabweichung zu einem terrestrisch vermessenen Fest-
punkt des BEV ermittelt.
Abb. 1: Untersuchungsgebiet (UG) Gde. Mutters, Tirol (eigene Darstellung, Daten: Google
Earth, 2021)
Die Tabellen 3-5 zeigen die horizontale Abweichung in ΔE (East) und ΔN (North) sowie den
berechneten horizontalen Lagefehler in Meter, den Status der Mehrphasendeutigkeit (Ambi-
guity resolution, AR) und die Messmethode. Für die Beobachtungsdauer von 1 Minute je
RTK-Messung (APOS & NTRIP) und 60 Minuten je PPK-Messung wurden aus dem Mittel-
wert die Punktkoordinaten bestimmt. Die Basisstation zur Aufzeichnung der Rohdaten für
Postprocessing mit dem Programmpaket RTKLIB (2.4.3 b33) und zur Echtzeit-Korrektur via
NTRIP, besteht aus der Kombination eines Emlid M2 und einer u-blox Patch Antenne (ANN-
MB). Mit Ausnahme der Emlid RS+ und RS2, die eine interne Antenne besitzen, wurde für
die Rover-Einheiten ebenso eine u-blox-Antenne (ANN-MB) verwendet. Es muss berück-
sichtigt werden, dass es sich bei den angegebenen Genauigkeiten, mit Ausnahme der Mes-
sungen im Waldsektor (Tabelle 5), um relative Differenzen zu dem geodätischen GNSS von
Trimble handelt.
Für die Messungen unter optimalen Bedingungen (UG Rural) können die Herstellerangaben
bestätigt werden. Alle Messungen weisen einen horizontalen Lagefehler von maximal 1 cm
gegenüber dem geodätischen Empfänger Trimble R10 auf, unabhängig der Messmethode
(RTK oder PPK). Studien von Hamza et al. (2020), Cobb et al. (2019), Gabl & Heller (2019),
Hill et al. (2019) und Gebre-Egziabher et al. (2018) belegen diese Ergebnisse. Die erwartbare
vertikale Genauigkeit liegt in einem Bereich von unter 2 Zentimeter für die Multifrequenz-
Empfänger und unter 3,1 Zentimeter für die Singlefrequenz-Receiver. Auch im Bereich desM. Gabl, A. Heller: Präzise Positionsdaten und mobile Geodatenerfassung 165
verbauten Gebietes (UG Suburban) liegt die Messgenauigkeit im Zentimeterbereich, wobei
der Multifrequenz-Empfänger näher an den Referenzkoordinaten des R10 liegt. Am Wald-
standort konnte die Mehrphasendeutung (AR) von keinem Gerät vollständig aufgelöst wer-
den. Aufgrund der relativ kurzen Beobachtungszeiten muss der absolute Lagefehler vorsichtig
interpretiert werden. Es zeigt sich jedoch die Tendenz, dass die Multiband-GNSS (RS2/M2)
mit dem u-blox Zed-F9P Chipsatz geeigneter für messtechnisch schwierige Bedingungen
sind und deshalb für die Prototypenentwicklung eingesetzt werden.
Tabelle 3: Vergleichsmessung UG Rural
Horizontale Vertikale
Messpunkte AR Messmethode,
ΔE [m] ΔN [m] Genauig- Genauig-
UG Rural Status Datum
keit [m] keit [m]
R10 APOS REF 0 0 REFERENZ REFERENZ Fix APOS RTK, 24.11.20
RS+ APOS 0,002 0,003 0,004 0,029 Fix APOS RTK, 24.11.20
RS+ PPK 0,003 −0,003 0,004 0,031 Fix PPK, 24.11.20
RS2 PPK 0,007 0,003 0,008 0,013 Fix PPK, 24.11.20
R10 PPK 0,008 −0,002 0,008 0,010 Fix PPK, 24.11.20
RS2 NTRIP 0,007 0,007 0,009 0,018 Fix NTRIP RTK,
24.11.20
RS2 APOS II 0,005 0,009 0,010 0,001 Fix APOS RTK, 24.11.20
Tabelle 4: Vergleichsmessung UG Suburban
Horizontale Vertikale
Messpunkte AR Messmethode,
ΔE [m] ΔN [m] Genauig- Genauig-
UG Suburban Status Datum
keit [m] keit [m]
R10 APOS REF 0 0 REFERENZ REFERENZ Fix APOS RTK, 16.09.20
RS2 APOS 0,013 −0,012 0,018 0,040 Fix APOS RTK, 16.09.20
M+ APOS 0,027 −0,003 0,027 0,083 Fix APOS RTK, 16.09.20
Tabelle 5: Vergleichsmessung UG Wald
Horizontale Vertikale
Messpunkte AR Messmethode,
ΔE [m] ΔN [m] Genauig- Genauig-
UG Wald Status Datum
keit [m] keit [m]
BEV TP 199-148 0 0 REFERENZ REFERENZ − terrestrisch, 09.06.61
R10 APOS −0,086 0,577 0,583 0,544 Float APOS RTK, 16.09.20
RS2 APOS 0,095 0,164 0,191 0,410 Float APOS RTK, 08.01.21
RS2 APOS 0,662 0,698 0,962 1,040 Float APOS RTK, 16.09.20
RS2 APOS 0,939 0,943 1,331 1,520 Float APOS RTK, 16.09.20
M+ APOS 1,920 –0,65 2,027 3,140 Float APOS RTK, 16.09.20
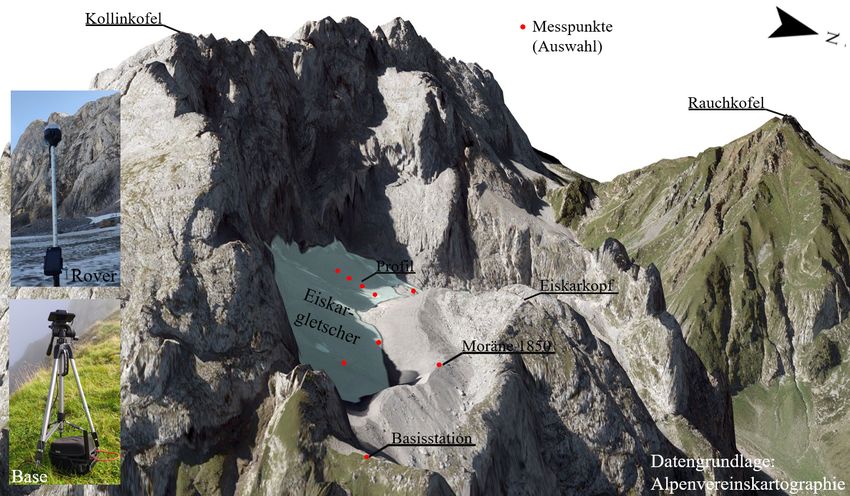
M2 APOS 0,204 2,047 2,057 2,130 Float APOS RTK, 08.01.21166 AGIT – Journal für Angewandte Geoinformatik · 7-2021 3 Feldversuche Um eine grundlegende Praxistauglichkeit der Low-Cost-Empfänger einschätzen zu können, wurden im Zuge der Sommerbilanzierung am Eiskargletscher erste Messungen durchgeführt. Das Hauptaugenmerk lag darin, ein geeignetes Setup für die Geländeaufnahmen zu finden. Hardwareseitig fand eine Kombination aus einer adaptierten Basisstation, bestehend aus ei- nem Reach M2 und einer u-blox-ANN-MB-Antenne, Anwendung. Für die Rover-Einheit wurde vorerst auf einen handelsüblichen RS2 zurückgegriffen. Emlid’s Steuerungssoftware ReachView beinhaltet bereits alle nötigen Funktionen (u. a. NTRIP Caster, Raw Logging, NMEA-Output), um die Receiver via Smartphone zu konfigurieren, zudem eine integrierte Mapping Funktion (u. a. Point stakeout). Weiterhin kann die RTK-Position der Receiver mit beliebigen GIS-Apps gekoppelt werden. Die Datenaufzeichnung kann somit in Abhängigkeit des geforderten Projektumfanges und auf die jeweiligen Nutzergewohnheiten angepasst wer- den. Abb. 2: Funktionsweise der Systemkomponenten (eigene Darstellung) Die Aufgabenstellung sah vor, mehrere bereits vorhandene Referenzmarken zur Gletscher- kartierung nachzumessen bzw. die Koordinaten und die Geländehöhe an den Pegelstangen sowie an einer definierten Profillinie zu erheben. Mit der integrierten Software ReachView können als Beispiel die gespeicherten Koordinaten der Profillinie einfach für Nachfolgemes- sungen im Gelände aufgefunden werden und die Höhendifferenz zur Massenbilanzierung er- mittelt werden. Die Position der Basisstation konnte mit dem Korrekturdienst APOS eingemessen werden. Ein mobiles Modem sorgte für die notwendigen Internetdaten. Die Korrekturdaten wurden im RTCM-Format (Multi Signal Messages) über eine Funkverbindung von der Basisstation zum Rover übertragen, da kein ausreichendes mobiles Datennetz auf der gesamten Gletscher- fläche verfügbar war. Die Reichweite der Funkverbindung (~ 1 km) stellte auch ohne direkte Sichtverbindung keine Probleme dar. Trotz großer Abschattungsbereiche der im Süden des Eiskargletschers aufragenden Kellerwand (Abb. 3), konnte für alle Messungen eine fixierte Lösung (vollständige Auflösung der Mehrphasendeutung-Zentimeterlevel) erreicht werden. Vergleichsmessungen mit einem unabhängigen Messverfahren konnten aufgrund fehlender bzw. ungenügender Referenzdaten zum Zeitpunkt der Kartierung noch nicht durchgeführt werden und müssten für eine noch genauere Einschätzung nachgeholt werden. Abbildung 3 zeigt anhand eines 3D-Modelles die Umgebungsbedingungen am Eiskargletscher, die Posi- tion der Basisstation und ausgewählte Messpunkte der Kartierung vom 08.09.2020.
M. Gabl, A. Heller: Präzise Positionsdaten und mobile Geodatenerfassung 167 Abb. 3: Messungen am Eiskargletscher, Karnische Alpen (eigene Darstellung) 4 Prototypenentwicklung Die Entwicklung der für hochalpine Einsätze ausgelegten GNSS-Sensoren zielte darauf ab, eine möglichst kosteneffiziente, kompakte und robuste RTK-Lösung zu entwickeln. Für die Empfängereinheit wurde ein Emlid Reach M2 in ein stoßfestes, wasserdichtes Gehäuse aus Polyamid integriert. Der intern verbaute Akku versorgt das Gerät mit 4000 mAh und kann zusätzlich via USB C mit einer externen Powerbank oder dem „Battery Share“ des Smart- phones betrieben werden. Die erforderliche Internetverbindung zum Empfang der Korrektur- signale (integrierter NTRIP Support) wird über den „Hotspot Mode“ des Feldrechners (Smartphone, Tablet, PC) oder einem externen, mobilen Modem ermöglicht. Die Übertra- gung der Korrekturdaten von der Basisstation zum Rover ist zusätzlich mit einem koppelba- ren Funkmodul (LORA) realisiert, das sich besonders für Gebiete ohne oder nur mit einge- schränkter Internetverbindung eignet. Für die Wahl der geeigneten Antenne, besteht die Möglichkeit über den in das Gehäuse integrierten und standardisierten SMA-Anschluss, ver- schiedene Antennen zu kombinieren. Die Empfänger-Antenneneinheit kann mit einem dafür vorgesehenen Adapter an das Smartphone/Tablet gekoppelt werden oder über eine gängige 5/8“ Buchse an einen klassischen Prismenstab montiert werden. Die GNSS-Einheit kann als Basisstation und/oder als Rover verwendet werden (Abb. 4). Speziell für Geländeerhebungen in schwer erreichbaren oder abgelegenen Gebieten, wo der Einfluss von Gewicht und Materialeinsatz nicht außer Acht gelassen werden können, eignet sich die Lotstab-Antennen-Integration zur senkrechten Ausrichtung der Messung. Der Pris- menstab (Kohlefaser) ist mittig teilbar, die Antenne und das Anschlusskabel sind im Schaft integriert. Detaillierte Spezifikationen des Prototypenbaus können der Abbildung 4 entnom- men werden.
168 AGIT – Journal für Angewandte Geoinformatik · 7-2021 Abb. 4: Prototyp „SmartRTK“ (eigene Darstellung) 5 Fazit und Ausblick Die Entwicklung, einer für die Anforderungen im Hochgebirge tauglichen RTK-fähigen Messeinheit bietet die Möglichkeit, zentimetergenaue Geländedaten mit geringen finanziel- len Mitteln zu gewinnen. Speziell für die Gegebenheiten alpiner Einsatzgebiete konnte eine kompakte, gewichtsoptimierte und auf Low-Cost-GNSS ausgerichtete „Smart RTK“-Mess- einheit realisiert werden. Im Kontext von Gletschervermessungen ist die auf RTK-basierte Messtechnik im Vergleich zu aufwendigerem Laserscanning oder der terrestrischen Vermessung via Tachymetrie be- reits eine effiziente Methode. Zudem handelt es sich bei GNSS im Vergleich mit ALS, TLS oder Luftbildaufnahmen durch UAVs um eine witterungsunabhängige Methode. Neben den vergleichsweise geringen Anschaffungskosten der Geräte, ist es auch die Bedienung der GNSS-Empfänger, die aufgrund ihrer bekannten Smartphone-Umgebung leichter verständ- lich ist. Somit ist die Handhabung nicht nur auf eine reine Expertenanwendung begrenzt, sondern kann auch von einer breiteren Nutzergruppe angewendet werden. „Einfache“ Mes- sungen von Punktkoordinaten, zum Beispiel die Bestimmung der höhenzonalen Veränderung der Gletscheroberfläche, die Zu- bzw. Abnahme der Längenverhältnisse oder das Anlegen von Profillinien kann mit der integrierten ReachView-Software im Feld aufgezeichnet wer-
M. Gabl, A. Heller: Präzise Positionsdaten und mobile Geodatenerfassung 169
den. Alternativ kann auf eine Vielzahl mobiler GIS-Lösungen aus den App Stores für An-
droid oder iPhone zurückgegriffen werden.
Aufgrund eingeschränkter quantitativer Vergleichsdaten bzw. der relativ kurzen Beobach-
tungszeiten, müssten die durchgeführten Testmessungen der vorliegenden Studie ausgebaut
und verbessert werden, um eine verbesserte Datenlage zu gewährleisten. Ebenso sollten Ver-
gleichserhebungen mit alternativen Messmethoden am Eiskargletscher für noch genauere
Aussagen durchgeführt werden.
Die zündholzschachtelgroßen Receiver-Einheiten, die standardmäßig bei UAVs oder für
Photogrammetrie zum Einsatz kommen, besitzen großes Potenzial, für die verschiedensten
Einsatzbereiche adaptiert werden zu können. Für ein Folgeprojekt wäre die Entwicklung ei-
ner permanenten, solarbetriebenen Low-Cost-Basisstation denkbar. Aber auch kinematische
Messaufbauten zur Ermittlung der Fließgeschwindigkeit von Gletschern wäre für eine Fol-
gestudie interessant. Die stetige Weiterentwicklung der Positionierungstechniken, insbeson-
dere von Precise Point Positioning (PPP), wird in einer separaten Studie ausgewertet und ist
noch nicht abgeschlossen.
Literatur
Brand, K., & Kolbe, T. H. (Eds.) (2020). Leitfaden Mobile GIS – Von der GNSS-basierten
Datenerfassung bis zu Mobile Mapping. Version 4.0. Runder Tisch GIS e. V. c/o Tech-
nische Universität München. München. Retrieved Dec 27, 2020, from http:/www.runder-
tischgis.de/publikationen/leitfaeden.
Cobb, P. J., Earley-Spadoni, T., & Dames, P. (2019). Centimeter-Level Recording for All:
Field Experimentation with New, Affordable Geolocation Technology. Adv. archaeol.
pract., 7(4), 353–365. Retrieved Dec 10, 2020, from doi:10.1017/aap.2019.21.
Emlid Ltd. (2021). Emlid Reach. Retrieved Januar 10, 2021, from https://emlid.com.
Gabl, M., & Heller, A. (2019). Möglichkeiten und Grenzen von Low-Cost-RTK-GNSS-
Receiver. AGIT – Journal für Angewandte Geoinformatik, 5-2019, 306–314. Retrieved
Dec 01, 2020, from
https://gispoint.de/fileadmin/user_upload/paper_gis_open/AGIT_2019/537669029.pdf.
Gebre-Egziabher, D., Davis, B., Ghazanfar, S.A., Jackson, J., & Sabrio, R. (2018). Evalua-
tion of Low-Cost, Centimeter-Level Accuracy OEM GNSS Receivers. Final Report. Ed.
by Department of Aerospace Engineering and Mechanics. Minneapolis (MN/RC 2018-
10). Retrieved Dec 01, 2020, from http:// mndot.gov/research/reports/2018/201810.pdf.
Hamza, V., Stopar, B., Ambrožič, T., Turk, G., & Sterle, O. (2020). Testing Multi- Frequency
Low-Cost GNSS Receivers for Geodetic Monitoring Purposes. Sensors, 20(16). Re-
trieved Jan 16, 2021, from doi:10.3390/s20164375.
Hill, A. C., Limp, F., Casana, J., Laugier, E. J., & Williamson, M. (2019). A New Era in
Spatial Data Recording: Low-Cost GNSS. Adv. archaeol. pract., 7(2), 169–177. Re-
trieved Dec 18, 2020, from doi:10.1017/aap.2018.50.
Trimble (2021). Trimble R10 Datasheet. Retrieved Jan 10, 2021, from
https://geospatial.trimble.com.
u-blox (2021). u-blox AG. Retrieved Dec 19, 2020, from https://www.u-blox.com.Sie können auch lesen