TECHNOLOGIEN UND ANWENDUNGEN VON GALILEO
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
TECHNOLOGIEN UND ANWENDUNGEN VON GALILEO Vortrag im Rahmen der Verleihung des August Euler-Luftfahrtpreises durch den Arbeitskreis Luftverkehr der TU Darmstadt am 30. Juni 2008 im Staatsarchiv Darmstadt 1. EINLEITUNG UND HINTERGRUND In den 80er Jahren hat die Europäische Union (EU) einen sowohl politischen als auch ökonomischen Bedarf für ein Satellitennavigationssystem identifiziert, ähnlich dem US-Amerikanischen Global Positioning System (GPS) aber unter Europäischer Kontrolle. Zu diesem Zweck wurde das Galileo Joint Undertaking (GJU) als gemeinsame Einrichtung des European Space Agencies (ESA) und der EU gegründet. Zum Ende 2006 wurde diese Einrichtung durch die Galileo Supervising Authority (GSA) mit Sitz in Brüssel abgelöst. Galileo wird aus einer Konstellation von 30 Satelliten in drei Bahnebenen auf einer Bahnhöhe von 23000 km und einem weltweiten Netzwerk aus Bodenstationen bestehen. Galileo ist der Europäische Beitrag zu einem Globalen Satellitennavigationssystem (GNSS). Mit der Fertigstellung wurde zunächst im Jahre 2008 gerechnet. Durch Verzögerungen in unterschiedlichen Bereichen, sowohl politisch als auch technisch, wird sich die Einsatzbereitschaft verzögern. Die ursprünglich avisierten Kosten belaufen sich auch 3.7 Milliarden Euro. Galileo wird unabhängig von bestehenden Systemen sein, soll mit diesen aber kompatibel mit bleiben. Dies gilt insbesondere für GPS aber soweit möglich auch für das Russische GLONASS-System. Nach erfolgreicher Systemdefinition bereitet sich Galileo derzeit auf die In- Orbit Validation (IOV)-Phase vor, mit dem Ziel, die Erfüllung der spezifizierten Anforderungen aus der Systemdefinition zu verifizieren, bevor mit dem eigentlichen Aufbau des Systems begonnen wird. Im Rahmen der IOV-Phasen sollen neben dem Ende 2005 erfolgreich gestarteten Experimentalsatelliten Giove-A ein zweiter Experimentalsatellit Giove-B und bis Ende 2008 vier weitere Galileo-Satelliten gestartet werden. Zwischenzeitlich wurde durch ESA die Beschaffung eines Giove-A2- Satelliten beschlossen, um Programmrisiken zu reduzieren. Alle Giove-
Satelliten haben die primäre Aufgabe, die Frequenzen von Galileo zu sichern, dienen aber darüber hinaus bereits einer Technologieerprobung. Bodeseitig wird bis ins Jahr 2008 die zur Systemverifikation benötigte Infrastruktur installiert. Insgesamt beläuft sich das Budget der IOV-Phase auf 1.5 Milliarden Euro und wird gemeinsam durch EU und ESA finanziert. Einsatzbereitschaft wird nach erfolgreich abgeschlossener IOV-Phase in der sich anschließenden Full Operational Capability (FOC)-Phase angestrebt. Die Kosten dieser Phase wurden auf bis zu 2.5 Milliarden Euro geschätzt und sollten ursprünglich über ein Public Private Partnership (PPP) bereitgestellt werden. Im Rahmen der FOC-Phase werden die verbleibenden Systemelemente aufgebaut. Galileo wird die erste Infrastruktur sein, welche Eigentum der EU wird, vertreten durch die Europäische Kommission (EC). Betrieben wird Galileo letztendlich durch einen Konzessionär – zunächst über einen Zeitraum von 20 Jahren. Dieses Betreiberkonsortium wurde zunächst im Rahmen einer Ausschreibung ermittelt, bestehend aus einer Zusammenführung der zuletzt konkurrierenden Konsortien. Ursprünglich war eine vertragliche Einigung bis Ende 2006 geplant. Die Verhandlungen gestalteten sich jedoch unerwartet schwierig, wobei nach Aussage der GSA neben den bekannten Risken hinsichtlich Technologen und Haftungsfragen sich insbesondere die komplexe Organisation und Entscheidungsfindung innerhalb des Konsortiums als Problem erwiesen hatte. Die wirkt sich auch nachteilig auf die Einbindung des European Geostationary Navigation Overlay Service (EGNOS) aus, welches seinem Betrieb entgegensieht und in die Galileo- Konzession mit eingebunden werden sollte. Überlegungen seitens der GSA berücksichtigen derzeit entsprechende Alternativen. Die Verhandlungen zwischen GSA und dem industrielle Betreiberkonsortium waren zwischen- zeitlich zum Stillstand gekommen. Am 10. Mai 2007 lief ein Ultimatum an das Betreiberkonsortium zur Einigung und Vertragsunterzeichnung aus und die EC hatte in Folge eine Empfehlung an das Europäische Parlament und den Rat formuliert. Demzufolge ist das bislang verfolgte PPP-Modell gescheitert und soll durch einen zweistufigen Prozess ersetzt werden, in dem der Aufbau des Galileo- Systems zunächst durch die öffentliche Hand finanziert wird und in einem zweiten Schritt ein privatwirtschaftliches Konsortium den Betrieb in PPP
übernimmt. Laut Aussage der EC ist das Scheitern insbesondere begründet in einer unterschiedlichen Bewertung des Marktrisikos, welches entgegen der ursprünglichen Erwartung nicht vom Betreiberkonsortium getragen werden kann. Des Weiteren bestätigt die EC in Ihrer Empfehlung zum einen die Notwendigkeit für Galileo als entscheidende Infrastruktur für eine moderne Gesellschaft zum anderen die Gültigkeit und Robustheit der Systemspezifikation als Ergebnis von rund 10 Jahren erfolgreicher Arbeit an Design und technischer Qualifikation des Galileo-Systems durch ESA und Industrie. Um die Auswirkungen eines verspäteten Markteintritts zu minimieren, insbesondere im Hinblick auf den Wettbewerb mit einem modernisierten GPS, sollen daher keine fundamentalen Änderungen am Systementwurf erfolgen. Die europäischen Transportminister sind auf ihrer Konferenz Anfang Juni 2007 der Empfehlung der EC gefolgt und haben das PPP-Modell für gescheitert erklärt. Eine abschließende Entscheidung über eine Finanzierung des Aufbaus von Galileo allein durch die öffentliche Hand erfolgte Ende 2007. Die neue Organisationsstruktur stellt sich nun wie folgt dar. Das Europäische Parlament und der Rat tragen die politische Verantwortung. Die Europäische Kommission hat die programmatische Leitung inne, unterstützt durch ein eigens eingerichtetes Komitee. Die GSA unterstützt die EC in Fragen der Zertifizierung und Marktentwicklung. Die ESA wird nach Empfehlung der EC für Systementwurf und Beschaffung verantwortlich bleiben und unter Führung der EC das Galileo-System verantwortlich aufbauen. Der spätere Betrieb erfolgt gemäß Empfehlung nach wie vor auf privatwirtschaftlicher Basis. Die Ausschreibung der verbleibenden Systemkomponenten erfolgt nicht nach ESA-Richtlinien sondern nach EU- Wettbewerbsrichtlinien und unterliegt daher nicht dem sogenannten „Geo Return“, bei dem darauf geachtet wird, dass seitens der ESA-Mitgliedstaten eingebrachte Mittel auch an die heimische Industrie zurückfließen. Aus diesem Grund wird die weltweite Ausschreibung in 6 Arbeitspakete untergliedert, wobei ein Konsortium nur für jeweils zwei Arbeitspakete gleichzeitig anbieten kann. In diesem Zusammenhang wurde auch die Frage nach Zulassung nicht-europäischer Vertragsnehmer kontrovers diskutiert.
Die akkumulierten Verzögerungen im Galileo-Programm belaufen sich
bereits jetzt auf insgesamt 5 Jahre. Mit dem Erreichen der vollen Einsatz-
bereitschaft von Galileo wird derzeit nicht vor 2013 gerechnet.
2. SYSTEMKOMPONENTEN
Das Galileo-System setzt sich einer Vielzahl von Komponenten zusammen,
welche wiederum einzelnen Segmenten zugewiesen werden können. Hierbei
unterscheidet man zwischen
- Raumsegment bestehend aus den Galileo Satelliten,
- Bodensegment bestehend aus einem Netzwerk von Sende- und
Empfangsstationen,
- Nutzersegment bestehend aus stationären und mobilen Endnutzern
- und Umgebungseinflüssen.
Letztere stellen zwar streng genommen kein Segment im herkömmlichen
Sinne dar, sind aber für die Systemdefinition und Leistungsanalyse relevant
und sollen daher ebenfalls dargestellt werden.
2.1 Raumsegment
Das Raumsegment besteht aus insgesamt 30 Satelliten, von denen 27
operativ genutzt werden und drei weitere als Reserve im Orbit platziert
werden, jeweils einer pro Bahnebene. Die Bahnenparameter der Satelliten
sind so gewählt, dass sich eine gleichmäßige Verteilung der jeweils 9
operationellen Satelliten entlang jeweils einer Bahn ergibt. Die Bahnebenen
sind um jeweils 56° gegenüber der Äquatorebene geneigt und um 120°
entlang des Äquators gegeneinander verschoben. Diese Konstellation ist in
Fehler! Verweisquelle konnte nicht gefunden werden. dargestellt und
ermöglicht eine gleichmäßige globale Abdeckung und ausreichende
Sichtbarkeit der Satelliten vom Boden. Die Umlaufzeit der Satelliten um die
Erde beträgt 14 Stunden. Nach 10 Tagen wiederholen sich die
geometrischen Verhältnisse für jeden Punkt auf der Erde.
Die Bahnhöhe von 23000 km weist auf einen so genannten Mittleren
Erdorbit (MEO) hin, welcher sich für derartige Systeme als vorteilhaft
erweist, insbesondere hinsichtlich der Abdeckung bei Vermeidung des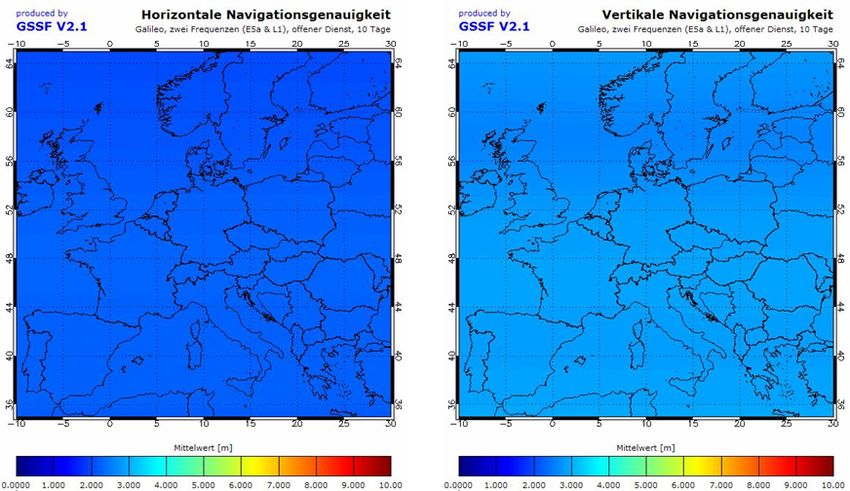
Luftwiderstands der Restatmosphäre. Andererseits ist der MEO
gekennzeichnet durch eine erhöhte Strahlungsbelastung, welche sich
nachteilig auf die Lebensdauer von elektrischen Komponenten und
insbesondere der Solarzellen und damit der Energieversorgung der Satelliten
auswirkt. Ein direkter Einfluss auf das Navigationssignal besteht jedoch
nicht. Die geforderte Lebensdauer der Galileo-Satelliten beträgt 12 Jahre.
Bei einem geplanten Systembetrieb von insgesamt 20 Jahre, ist somit ein
Austausch der Satelliten vorgesehen – verbunden mit einer möglichen
Technologieevolution ähnlich zu GPS.
Abbildung 1: Galileo-Bahnebenen im MEO
Die Galileo-Satelliten werden Navigationssignale auf mehreren Frequenzen
aussenden, welche in Tabelle 1 dargestellt sind. Die Sendeleistung differiert
für die einzelnen Frequenzen zwischen 25 und 90 W.
Signal L1 E5a E5b E6
Trägerfrequenz (MHz) 1575.42 1176.45 1207.14 1278.75
Sendeleistung (W) 89.12 25.58 26.79 64.43
Tabelle 1: Galileo-Frequenzen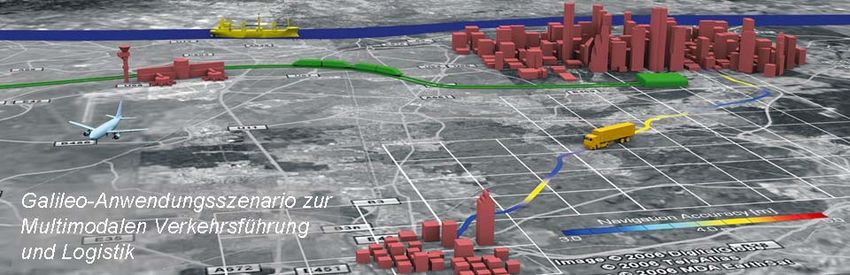
2.2 Bodensegment
Das Galileo-Bodensegment besteht aus einem Netzwerk von insgesamt 30
Sende- und Empfangsstationen, denen spezifische Aufgaben zukommen. Im
Rahmen der IOV-Phase wird eingeschränktes Segment für den
experimentellen Betrieb genutzt. Die Aufgaben der einzelnen
Bodenstationen definieren sich wie folgt, wobei einzelne Stationen für meh-
rere Aufgaben gleichzeitig genutzt werden:
- Telemetry, Tracking and Command (TTC) – Bahnverfolgung und
Satellitensteuerung, Element des Satellitenbetriebs (5 Stationen)
- Uplink Station (ULS) – bodenseitige Versorgung der Satelliten mit
aktuellen Positionsdaten (9 Stationen)
- Galileo Sensor Station (GSS) – Empfangsstationen für das
Navigationssignal zur Systemüberwachung (alle 30 Stationen)
Neben den designierten Kontrollzentren in Oberpfaffenhofen, dem German
Space Operation Centre (GSOC), in Fucino in Italien und dem European
Space Operations Centre (ESOC) in Darmstadt sind die folgenden
Einrichtungen von besonderer Bedeutung:
- Precision Timing Facility (PTF) – Synchronisation der Galileo-
Zeitreferenz
- Orbit Synchronisation Processing Facility (OSPF) – Bahnvorhersage
- Integrity Processing Facility (IPF) – Kontrolle der Galileo-
Navigationsdatenintegrität
2.3 Nutzersegment
Die potentiellen Nutzer von Galileo sind vielfältig. Im Rahmen dieser
Darstellung soll lediglich ein nicht abschließender Überblick gegeben
werden. Galileo-Anwendungen sind in den Folgenden Bereichen denkbar:
- Flugführung (Landung unter Schlechtwetterbedingungen)
- Unterstützung von Bahn-, Schiff- und Straßenverkehr (multimodale
Verkehrsführung)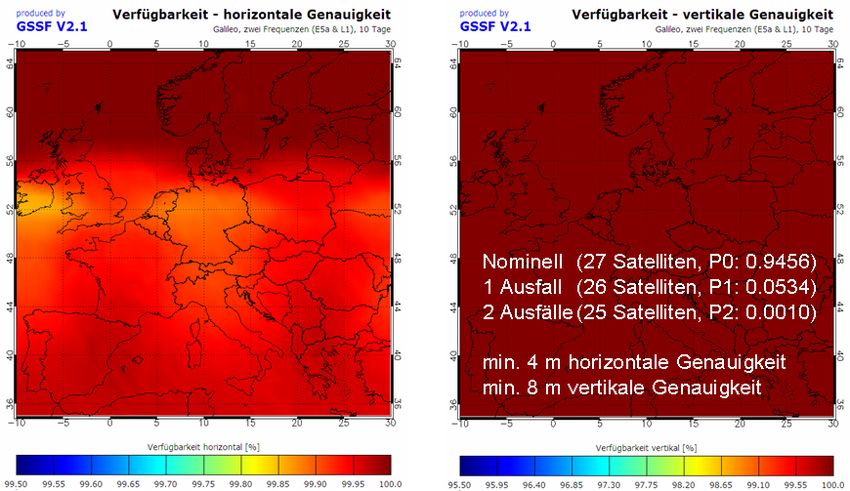
- Logistikanwendung in der Verfolgung von Frachtgütern
(Gefahrguttransporte, Flottenmanagement)
- Unterstützung hoheitlicher Aufgaben (Polizei, Feuerwehr,
Krankenwagen in Notfallszenarien)
- Positionsbasierte Dienstleistungen (z.B. Reiseführer und
Fluggastinformation)
- Landwirtschaft (Führung von Landmaschinen)
- Vermessungswesen und Geoinformation
- Raumfahrt (Positionsbestimmung von Satelliten)
und viele mehr …
Abbildung 2: Galileo-Anwenungsszenarien
2.4 Umgebungseinflüsse
Die folgenden Umgebungseinflüsse sind maßgeblich an der
Beeinträchtigung der mittels Satellitennavigation erzielbaren
Positionierungsgenauigkeit beteiligt:
- Störung des Navigationssignals durch Ionosphäre – Dieser
Atmosphärische Einfluss bewirkt eine Verzögerung der
Signallaufzeit. Da frequenzabhängig, kann dieser Einfluss unter
Verwendung zweier Sendefrequenzen empfängerseitig kompensiert
werden. Diese Störung ist dominant.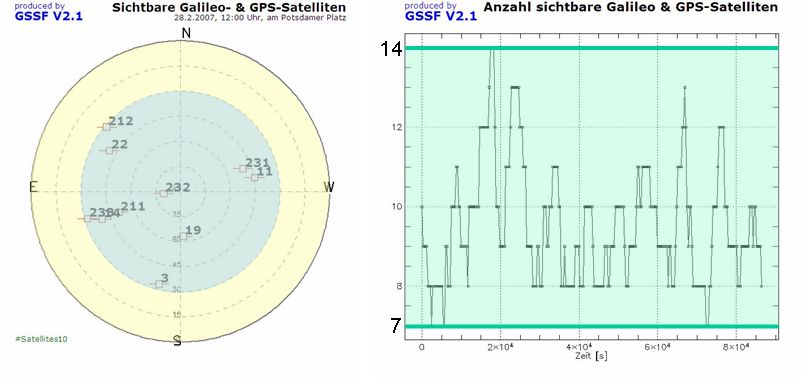
- Störung des Navigationssignals durch Troposphäre – Dieser
Atmosphärische Einfluss bewirkt eine Verzögerung der Signallaufzeit
und ist insbesondere abhängig von Temperatur und Luftfeuchtigkeit.
Entsprechende Modelle zur empfängerseitigen Kompensation sind
verfügbar.
- Störung des Signalempfangs durch Mehrwegausbreitung (engl.
Multipath) – Diese Störung ist bedingt durch Reflexionen des
Navigationssignals in der Umgebung des Empfängers. Hierdurch
ergeben sich Mehrdeutigkeiten, die bei Positionierungsaufgaben im
Extremfall bis zu 100 m Abweichung von der realen Position ergeben
können (Wert gültig für GPS). Moderne Empfänger sind bis zu einem
gewissen Grade in der Lage derartige Mehrdeutigkeiten zu
identifizieren. Strategien zur Kompensation dieses Einflusses sind
allerdings noch Bestandteil von wissenschaftlichen Untersuchungen
z.B. durch Institute des Deutschen Zentrums für Luft- und Raumfahrt
(DLR).
- Weitere Störquellen, wie etwa empfängerseitiges Rauschen und
Phasensprünge seien an dieser Stell lediglich erwähnt.
2.5 Navigationsdienste
Folgende Galileo-Dienste sind geplant:
- Offener Dienst, engl. Open Service (OS) – Dieser Dienst steht in
direkter Konkurrenz oder als Ergänzung zum GPS-System. Er soll
ebenfalls frei und kostenlos empfangbar sein. Allerdings müssen
Hersteller entsprechender Empfänger voraussichtlich Lizenzgebühren
entrichten. Der Offene Dienst ermöglicht die Ermittlung der eigenen
Position und Geschwindigkeit und liefert zudem ein Zeitsignal.
Galileo wird den Empfang auf zwei Frequenzen ermöglichen. Damit
wird es mit Zweifrequenzempfängern möglich sein, insbesondere die
dominante Ionosphärenstörung zu korrigieren. Garantien für die
ständige Verfügbarkeit des OS wird es aber voraussichtlich nicht
geben.
- Kommerzieller Dienst, engl. Commercial Service (CS) – Dieser
Dienst wird kostenpflichtig sein und soll verschlüsselt zusätzliche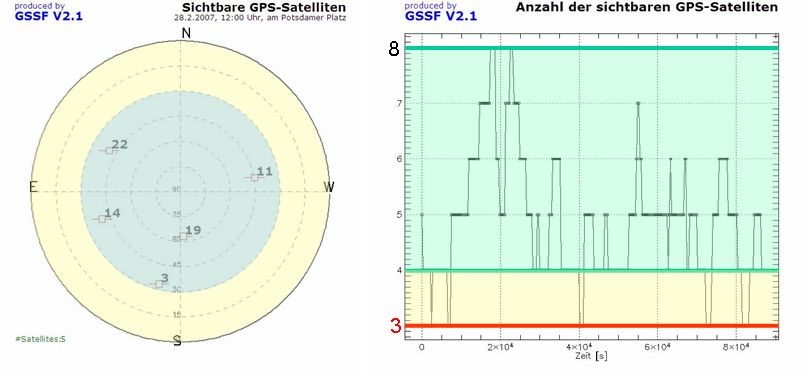
Sendefrequenzen und damit höhere Übertragungsraten von ca. 500
bit/s zur Verfügung stellen. So sind dann beispielsweise
Korrekturdaten zur Steigerung der Positionsgenauigkeit um ein bis
zwei Größenordnungen empfangbar. Es sind Garantien zur ständigen
Verfügbarkeit dieses Dienstes geplant.
- Sicherer Dienst, engl. Safety-of-Life (SoL) – Dieser Dienst steht
sicherheitskritischen Bereichen zur Verfügung, z.B. dem Luft- und
dem Schienenverkehr. Er ist das Korrektiv zu den Risiken, die sich
aus den kommerziellen Anwendungen ergeben können. Er liefert
Integritätsinformationen, welche den Nutzer vor Systemausfällen
warnt. Auch für diesen Dienst sind Garantien für die ständige
Verfügbarkeit geplant.
- Regulierter oder Staatlicher Dienst, engl. Public Regulated Service
(PRS) – Dieser Dienst steht ausschließlich für hoheitliche Aufgaben
zur Verfügung, sprich Polizei, Küstenwache oder Geheimdienste. Ein
militärische Einsatz ist ebenfalls möglich. Das ebenfalls verschlüsselte
Signal ist weitgehend gegen Störungen und Verfälschungen gesichert
und soll eine hohe Genauigkeit und Zuverlässigkeit bieten.
- Such- und Rettungsdienst, engl. Search And Rescue (SAR) – Dieser
Dienst soll das mit COSPAS-SARSAT und MEOSAR bereits
etablierte SAR-System unterstützen und eine schnelle und weltweite
Ortung von Notsendern von Schiffen oder Flugzeugen erlauben. In
diesem Zusammenhang soll eine Rückantwort von der Rettungsstelle
an den Notrufsender erstmalig möglich sein. Dies soll durch den so
genannten Galileo-Rückkanal realisiert werden, welcher jedoch
ausschließlich für diesen Zweck vorgesehen ist und im
Zusammenhang mit den anderen Diensten voraussichtlich nicht zur
Verfügung steht.
Die geforderte Leistungsfähigkeit des Galileo-Systems wird anhand der
Parameter Navigationsgenauigkeit, Integrität, Kontinuität, Verfügbarkeit
bestimmt welche in Abhängigkeit des jeweiligen Dienstes im sogenannten
„Galileo System Requirements Document (GSRD)“ definiert sind.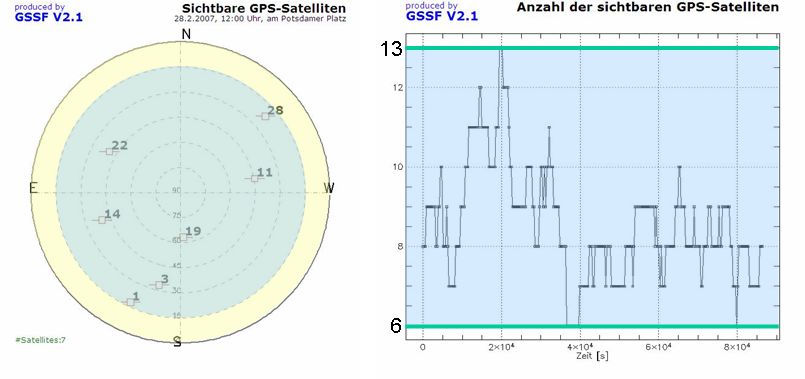
3. PRINZIP DER SATELLITENNAVIGATION Im Folgenden sei das Funktionsprinzip kurz erläutert. Die Navigationssatelliten befinden sich in hohen Erdumlaufbahnen, über 20.000 km. Dies erlaubt eine globale Abdeckung, wobei ein Empfänger den Abstand zum Satellit durch Messung der Signallaufzeit ermittelt. Die in den Satelliten verwendeten Atomuhren sind zwar hoch genau, dennoch sind Abweichungen im Nanosekundenbereich unvermeidbar und die Empfängeruhren sind zudem wesentlich ungenauer. Daher sind Signale von mindestens 4 Satelliten erforderlich zur Bestimmung der eigenen Position, drei für die eigentliche Triangulation und ein weiterer für die Zeitkorrektur. 3.1 Zeitsynchronisation und Bahnvorhersage Die Unterschiede zwischen den Atomuhren der Satelliten werden in der Precision Time Facility (PTF) des Bodensegments ermittelt. Diese Information wird dem Nutzer über die Galileo-Satelliten als Teil des Navigationssignals zur Fehlerkorrektur zur Verfügung gestellt. Die Orbit Synchronisation Processing Facility (OSPF) berechnet die genauen Satellitenpositionen. Hierzu werden Messdaten aus einem Netzwerk von Empfängern sowie Laserdistanzmessungen genutzt. Diese Information wir in regelmäßigen Abständen and die Galileo-Satelliten übertragen und über das Navigationssignal an den Nutzer weitergegeben. Hier liegen am ESOC fundierte Erfahrungen mit GPS vor, die eine Prognose für Galileo von 10 cm Bahnbestimmungsgenauigkeit in Empfängerrichtung erlauben. Die Bestimmung der genauen Satellitenpositionen ist die Basis für die nutzerseitige Positionsbestimmung im Empfänger – aber nicht mit dieser zu verwechseln. 3.2 Integrität und Satellitensteuerung Integrität bezieht sich auf das Vertrauen in die Richtigkeit der durch das Navigationssystem bereitgestellten Information. Durch die Integrity Processing Facility (IPF) werden fehlerhafte Satelliten in Echtzeit erkannt und im Navigationssignal für den Nutzer identifiziert (in 6 Sekunden bei Überschreiten von 12 m horizontal, 20 m vertikal). Das Navigationssignal liefert weitere Daten (SISMA), welche im Empfänger zur Bestimmung einer Kenngröße (PHMI) dienen, welche die Wahrscheinlichkeit bezeichnet, dass der Nutzer über einen Ausfall nicht informiert wird.
Die Steuerung der Satelliten teilen sich insgesamt drei Galileo- Kontrollzentren, das German Space Operation Centre (GSOC) in Oberpfaffenhofen, das Kontrollzentrum in Fucino in Italien sowie das European Space Operations Centre (ESOC) in Darmstadt. 4. SYSTEMVERIFIKATION 4.1 Simulation Im Auftrag der ESA/ESTEC hat ein internationales Konsortium unter Führung von VEGA einen Galileo-Systemsimulator entwickelt. Die „Galileo System Simulation Facility (GSSF)“ erlaubt lange vor Inbetriebnahme von Galileo bereits einen Blick in die Zukunft der Satellitennavigation. Die Hauptaufgaben von GSSF bestehen in der Vorhersage der Leistungsfähigkeit des Galileo-Systems sowie in der Bereitstellung simulierter Galileo-Daten, welche für experimentelle Zwecke eingesetzt werden können. Hierzu stellt GSSF unterschiedliche Modelle zur Verfügung, deren Komplexität an die jeweilige Zielsetzung angepasst ist. Hierbei werden neben der Bewegung der Navigationssatelliten insbesondere auch die Einflüsse der Umgebungsbedingungen auf das Signal, das Galileo- Bodensegment sowie der eigentliche Nutzer im lokalen Umfeld modelliert. GSSF erlaubt Analysen zur Vorhersage der Navigationsgenauigkeit und Integrität für spezifizierte Zeiträume und Positionen, bis hin zu einer regionalen oder globalen Abdeckung. Im Einzelnen können Bewertungsgrößen wie Sichtbarkeit, Geometrie, Positionsfehler und Integrität bestimmt werden, sowie die zugehörige Verfügbarkeit und Kontinuität des Navigationsdienstes über der Zeit. Neben Analysen zur Interferenz mit anderen Navigationssystemen ermöglicht GSSF auch eine Analyse des Fehlerbudgets, d.h. der individuellen Beiträge umgebungsbedingter Störeffekte auf die Qualität des Navigationssignals. Neben statischen sind auch mobile Empfänger darstellbar. Zudem ist GSSF nicht auf die Simulation von Galileo beschränkt, sondern erlaubt für vergleichende Untersuchungen auch die Simulation von GPS und EGNOS. Weitere Systeme können nutzerseitig definiert werden, dies wurde beispielsweise bereits für QZSS und WAAS realisiert.
Mittels GSSF hat VEGA im Auftrag der ESA/ESTEC eine Analyse zur Bestätigung der Richtigkeit des Galileo-Systementwurfs durchgeführt, deren Ergebnisse in den Galileo „Critical Design Review (CDR)“ eingegangen sind. Neben dieser Vorhersage der Galileo-Systemparameter stellt die Bereitstellung von simulierten Rohdaten im RINEX-Format einen weiteren Einsatzbereich von GSSF dar. Diese Rohdaten eignen sich für experimentelle Zwecke. Hierzu zählt zum einen die Verifikation der Elemente des Galileo-Missionsbodensegments zum anderen aber insbeson- dere auch die Entwicklung möglicher Galileo-Anwendungen. Die Validierung von GSSF erfolgte in enger Zusammenarbeit mit ESA/ESOC unter Verwendung von realen GPS-Messdaten und wird derzeit um eine Kalibrierung mittels Daten des Experimentalsatelliten GIOVE-A ergänzt. 4.2 Experiment Neben numerischen Analysen sind insbesondere die Galileo-Testsatelliten GIOVE-A und B ein wesentliches Element der Systemverifikation. Der erfolgreiche Start von GIOVE-A mit Soyuz-Fregat von Baikonur erfolgte am 28. Dezember 2005, das erste Galileo Navigationssignal am 12. Januar 2006 empfangen. Diese war schon repräsentativ für Galileo wodurch die Frequenzen offiziell gesichert waren. Weiter Missionsziele bestanden im Test der Rubidium-Atomuhren und der Charakterisierung des MEOs für diese Anwendung. Die Betriebsdauer ist auf 3 Jahre beschränkt, GIOVE -A wird daher in wenigen Monaten abgeschaltet. GIOVE-B wurde, wiederum mit Soyuz-Fregat, von Baikonur am 26. April 2008 erfolgreich gestartet und ein Navigationssignal erstmals am 7. Mai 2008 empfangen. Es gelang ein Nachweis der Verbundfähigkeit zwischen Galileo & GPS und die Frequenzen sind weiterhin gesichert. GIOVE-B ist zusätzlich mit noch genaueren Uhren ausgestattet, zwei passive H-Maser liefern 1ns Genauigkeit pro Tag. Die Lebensdauer des Satelliten wird mit 2,5 Jahren angegeben.
4.3 In-Orbit Validation (IOV) Die sogenannte IOV-Phase ist für einen Zeitraum von 2 Jahern von 2010 bis 2011 vorgesehen. In ihr wird eine Konstellation aus 4 Galileo-Satelliten sowie ein reduziertes Bodennetzwerk mit nur einem Kontrollzentrum für experimentelle Zwecke genutzt, um repräsentative Leistungsdaten des Galileo-Systems zu ermitteln. Bei der gewählten Konstellation ist im Mittel jeweils nur ein Satellit vom Boden sichtbar, über beschränkte Zeiträume aber auch maximal 4 Satelliten gleichzeitig. Daher erfordert diese Testphase eine gründliche Planung und Ergebnisanalyse mittels einer derzeit im Aufbau befindlichen Testinfrastruktur, bestehend aus Software und Hardware. Die Verifizierung der Systemgenauigkeit erfolgt zudem auch in Kombination mit GPS 5. ANWENDUNGSBEISPIELE 5.1 Anwendungsbereich Verkehrsführung Im Rahmen des EU-Projekts „Co-operative Networks for Intelligent Road Safety (COOPERS)“ hat VEGA gemeinsam mit seinem Partner pwp- Systems GmbH eine Methodik entwickelt, welche der Analyse des Mehrwerts bei Nutzung von Galileo zur Verkehrsführung dient. Diese Methodik kombiniert GPS-Messfahrten zur Kalibrierung mit einer Galileo- Simulation zur Bestimmung der erzielbaren Verfügbarkeit und Genauigkeit. Im Rahmen eines Forschungsvorhabens zum Einsatz von Galileo im Verkehrsmanagement, welches die genanten Partner im Auftrag des Ministerium für Landesentwicklung und Verkehr des Landes Sachsen- Anhalt in Vertretung des Bundesministeriums für Verkehr, Bau und Stadtentwicklung unterstützt haben, wurde diese Methodik erstmals angewandt. Kern der Analyse war die Genauigkeit der Positionsbestimmung bei Fahrten im urbanen Umfeld, wo die Sichtbarkeit der Satelliten durch Hindernisse eingeschränkt ist. GPS (L1) liefert bereits Genauigkeiten unter 10 Metern in 95% der Fälle. Dies ist der Verkehrsanwendungen relevanter Genauigkeitsbereich. Eine alternative Nutzung von Galileo verbessert Genauigkeit im Mittel um 20%. Bei schwierigen Umgebungsbedingungen wächst der GPS-Fehler auf bis zu 40 Meter an. Eine gemeinsame Nutzung von GPS & Galileo reduziert den Fehler wiederum um etwa 20%, erreicht
aber nicht die oben genannten 10 Meter Genauigkeit. Demnach verbessert prinzipiell eine höhere Anzahl von empfangenen Satelliten die Qualität der Positionsbestimmung, allerdings stehen in kritischen Fällen - mit geringer Anzahl zu empfangener GPS-Satelliten - auch nur wenige Galileo-Satelliten zur Verfügung. Für die Mehrzahl der relevanten Anwendungen im Verkehr ist eine Koppelung der GNSS-Daten mit weiterer Sensorik und der Verschneidung mit digitalen Karten erforderlich. Hier schafft Galileo mit besseren Ausgangswerten die Basis für eine höhere Qualität. Das Maß dieser Verbesserung ist noch zu bestimmen. 5.2 Anwendungsbereich Flugführung Als wichtiges zukünftiges Element der Satellitennavigation, insbesondere im Luftverkehr, hat sich mittlerweile das Verfahren der bodengestützte Augmentierung etabliert, engl. „Ground Based Augmentation Systems (GBAS)“. Einzelne Flugphase des Präzisionsanflugs mit anschließender Landung stellen hohe Systemanforderungen an Genauigkeit, Verfügbarkeit, Kontinuität und Integrität. Neben dem bekannten ILS gewinnt GBAS immer mehr an Interesse. So werden seitens der Deutschen Flugsicherung in einem Pilotprojekt am Standort Bremen Präzisionsanflugverfahren mittels GBAS erprobt (CAT I, „ILS look-alike“). Es wird eine erhebliche Kosteneinsparungen gegenüber ILS erwartet, insbesondere hinsichtlich Anschaffung, Wartung und Flugvermessung. GNSS Landing System (GLS) bezeichnet in diesem Kontext die Nutzung von Verfahren der Satellitennavigation zur Kursbestimmung für den Landeanflug. Sogenannte Space-Based Augmentation Systeme (SBAS) beobachten die Genauigkeit und Zuverlässigkeit von GPS und zukünftig Galileo mittels eines Netzwerks von Referenzbodenstationen. Die Übermittlung geeigneter Korrekturen an den Nutzer erfolgt in Echtzeit und im Falle des Europäischen Vertreters EGNOS (European Geostationary Navigation Overlay Service) über drei geostationäre Satelliten. Mit der Kombination aus GPS & EGNOS sowie mit Galileo stehen damit zukünftig zwei unabhängige Systeme zur Verfügung. Dies ermöglicht eine
„robuste“ Satellitennavigation insbesondere für den Streckenflug und Non-
Precision Approach (NPA).
6. SIMULATIONSERGEBNISSE
Die folgenden Ergebnisse entstammen einer seitens VEGA IT GmbH
durchgeführten Leistungsanalyse und sind als exemplarisch zu bewerten.
Die folgenden Abbildungen zeigen den Einfluss einer Beschränkung der
Sichtbarkeit. Durch eine zunehmende urbane Bebauung geht bei alleiniger
Nutzung von GPS die Anzahl der sichtbaren Satelliten zurück. Ausgewertet
für einen Tag sind bei geringer Bebauung noch minimal 6 Satelliten
sichtbar, bei hoher Bebauungsdicht geht diese Zahl im vorliegenden Beispiel
auf zeitweise unter 4 zurück, was eine Navigationslösung unmöglich macht.
Unter Einbeziehung des zukünftigen Galileosystems steigt die Zahl der
minimal sichtbaren Satelliten wieder auf über 7.
Abbildung 3: Positionsbestimmung im urbanen Umfeld mit geringer Bebauungsdichte und
bei reiner GPS-NutzungAbbildung 4: Positionsbestimmung im urbanen Umfeld mit hoher Bebauungsdichte und
bei reiner GPS-Nutzung
Abbildung 5: Positionsbestimmung im urbanen Umfeld mit hoher Bebauungsdichte und
bei kombinierter Galileo & GPS-Nutzung
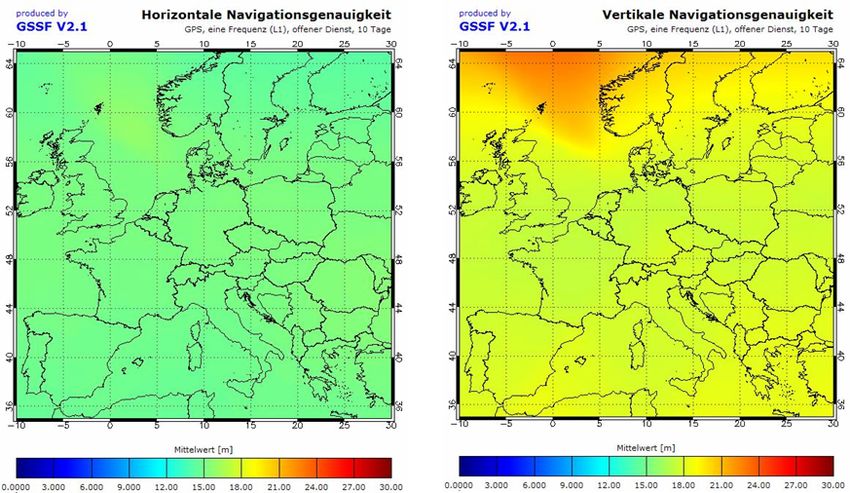
Die folgenden Simulationsergebnisse zeigen gemittelt über einen Zeitraum
von 10 Tagen die Genauigkeit der Positionsbestimmung über Europe mittels
GPS und Galileo, jeweils im Einfrequenzbetrieb auf L1. Hierbei wird
unterschieden zwischen horizontaler und vertikaler Genauigkeit.
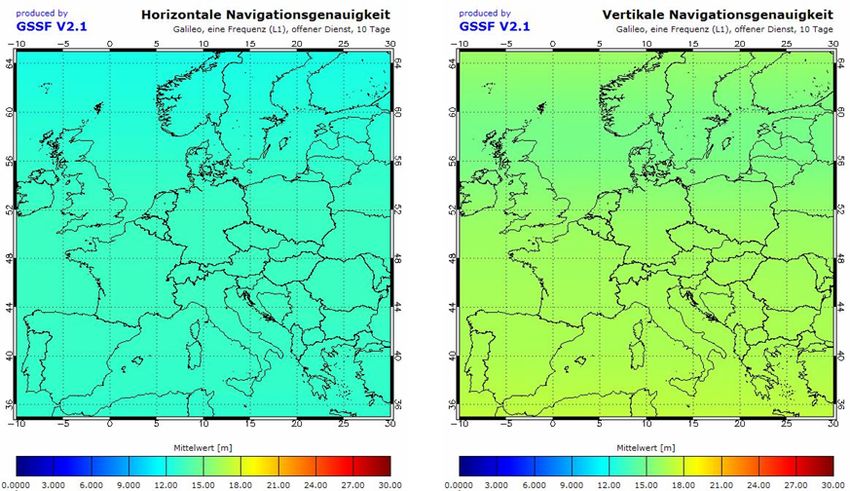
Erwartungsgemäß zeigt sich nur eine leichte Verbesserung der ausgehend
von 15 m horizontal im Falle von GPS auf knapp über 10 m im Falle von
Galileo. Allerdings ist die Verschlechterung der Genauigkeit in vertikaler
Richtung gegenüber der horizontalen bei Galileo wesentlich geringer
ausgeprägt als bei GPS. Dies scheint insbesondere in der Geometrie derKonstellation begründet. Erst ein Vergleich mit Simulationsergebnissen für
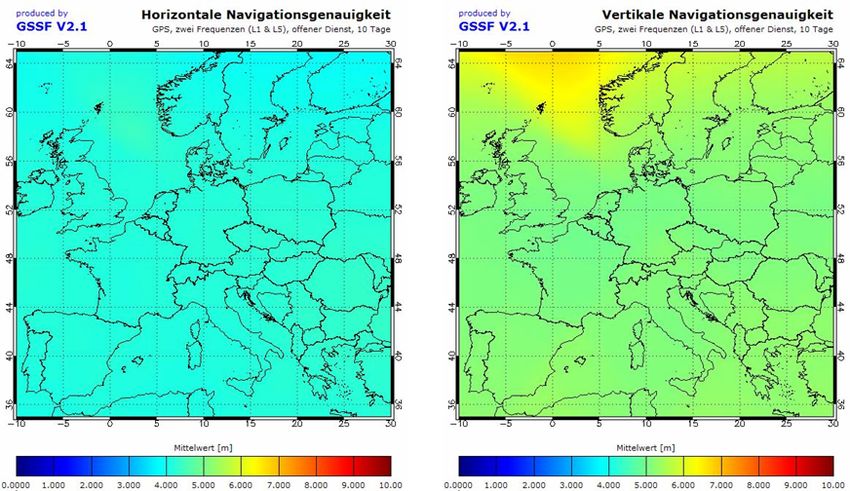
Galileo im Zweifrequenzbetrieb ergibt sowohl horizontal also auch vertikale
eine signifikante Steigerung der Genauigkeit auf unter 2 m. Allerdings trifft
dies analog auch auf ein modernisiertes GPS, ebenfalls im Zweifrequenzbe-
trieb zu. Dort werden immerhin Genauigkeiten im Bereich von 5 m erzielt.
Abbildung 6: Navigationsgenauigkeit mit GPS auf L1
Abbildung 7: Navigationsgenauigkeit mit Galileo auf L1Abbildung 8: Navigationsgenauigkeit mit Galileo auf E5a & L1
Abbildung 9: Navigationsgenauigkeit mit modernisiertem GPS auf E5a & L1
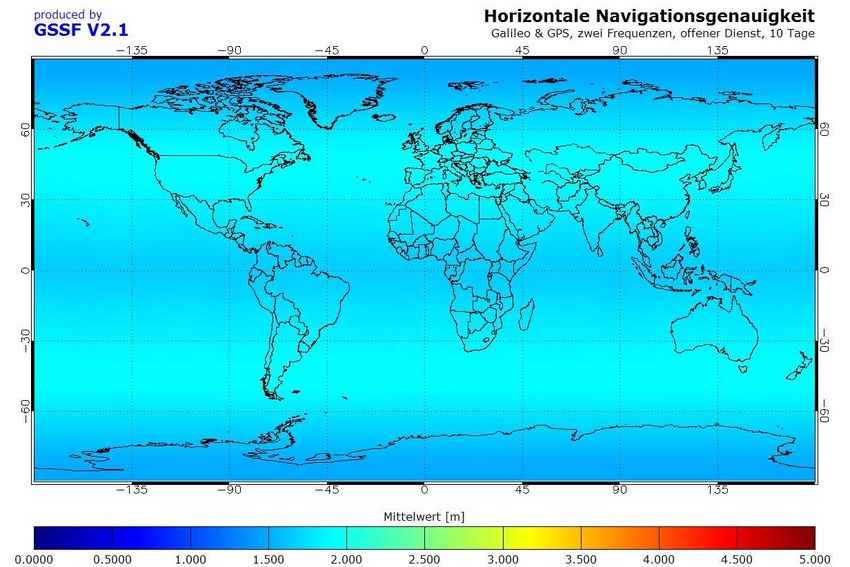
Die voraussichtlich wahrscheinlichste Anwendung beider Systeme durch
den Endnutzer besteht in der kombinierten Nutzung. In der folgenden
Abbildung werden hier, wiederum im Mittel und über einen Zeitraum von
10 Tagen, global Genauigkeiten von etwa 1,5 m erzielt. Dies wiederum
unter der Annahme eines modernisierten GPS und Zweifrequenzbetrieb.Alternativ wurde für dasselbe Szenario die Genauigkeit ermittelt, welche in
99,5% aller Fälle erzielt wurde. Auch hier wird global eine Genauigkeit
unter 2 m horizontal und unter 3,5 m vertikal erreicht.
Abbildung 10: Horizontale Navigationsgenauigkeit mit Galileo und modernisiertem GPS
auf zwei Frequenzen (Mittelwert)
Abbildung 11: Galileo-Verfügbarkeit (Forderung >99.5%)Unter Einbeziehung von Ausfällen eines oder zweier Satelliten mit entsprechender Wahrscheinlichkeit kann mittels GSSF die Verfügbarkeit sowohl horizontal als auch Vertikal bestimmt werden. Diese wurde in der in Abbildung 11 dargestellten Simulation für Galileo über einen Zeitraum von 10 Tagen im Zweifrequenzbetrieb analysiert. Die Anforderung von 4 m horizontaler Genauigkeit und 8 m vertikaler Genauigkeit in 99,5% aller Fälle wird leicht erreicht. 7. PERSPEKTIVEN VON GALILEO Die Schaffung neuer Arbeitsplätze erfordert eine Umsetzung von Innovationen in Anwendungen. Hauptanwendungsbereich von Galileo liegt voraussichtlich im Verkehr mit seinem großen Umsatzpotenzial in der Verkehrstelematik und hohen Wachstumsraten. Galileo wird eine gesteigerte Redundanz im Luftverkehr ermöglichen. Mit Galileo und GPS/EGNOS werden zwei völlig unabhängige aber kompatible Systeme zur Verfügung stehen. Im Bereich Logistik wird Galileo eine nahtlose Verfolgung von Gütern vom Außenbereich bis hinein in Gebäude durch die Kombination mit anderen kompatiblen Technologien erlauben. Galileo wir voraussichtlich bis 2013 betriebsbereit sein, weitere Verzögerungen sind zu vermeiden, um neben einem modernisierten GPS am Markt bestehen zu können. Eine Förderung und Beschleunigung der Marktentwicklung für Anwendungen der Satellitennavigation zur Schaffung von Hochtechnologie- Arbeitsplätzen sind Ziele von Initiativen wie dem Centrum für Satellitennavigation Hessen (cesah) mit Sitz in Darmstadt.
Sie können auch lesen

















































