Elektrohydraulische Reglerbaugruppe Serie PACHC Betriebsanleitung - Bulletin MSG11-5715-720/DE
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Elektrohydraulische Reglerbaugruppe Serie PACHC Betriebsanleitung Bulletin MSG11-5715-720/DE
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Serie PACHC Inhalt
1 Vorbemerkungen 6
1.1 Haftungsausschluss 6
1.2 Produktionsstätte 6
1.3 Hinweis auf Online-Version 6
1.4 Eingetragene Warenzeichen 6
1.5 Urheberschutz / Copyright 6
2. Einleitung 7
2.1 Gerätezuordnung 7
2.2 Typenschild PACHC 7
2.3 Sicherheitshinweise 8
2.3.1 Zielgruppe dieses Handbuchs 8
2.3.2 Gefahren- und Warnhinweise 8
2.3.3 Allgemeine Gefahren 8
2.3.4 Bestimmungsgemäßer Gebrauch 8
2.3.5 Sicherheitsbewusstes Arbeiten 9
2.3.6 Spezielle Sicherheitshinweise 9
2.4 Elektromagnetische Verträglichkeit 10
3 Systembeschreibung 12
3.1 PAC 12
3.2 Entwicklungsumgebung V3.5 12
4 Gerätebeschreibung 12
4.1 PACHC 12
4.2 Auslieferungszustand / Lieferumfang 12
4.3 Einsatzbereich 12
4.4 Front-/ Seitenansicht 13
4.5 Steckerübersicht 13
4.6 Anzeige und Bedienelemente 14
4.6.1 Statusanzeigen 14
5 Inbetriebnahme 15
5.1 Montage / Installation 15
5.1.1 Mechanische Installation 15
5.1.2 Elektrische Installation 16
5.2 Entwicklungsumgebung CODESYS V3.5 17
5.2.1 Gerätebeschreibung installieren 18
5.2.2 Gerätespezifische Bibliotheken installieren 19
ACHTUNG - VERANTWORTUNG DES ANWENDERS 5.2.3 Verwendung von Projekttemplates 20
5.2.4 PACHC einfügen (online) 20
VERSAGEN ODER UNSACHGEMÄßE AUSWAHL ODER UNSACHGEMÄßE VERWENDUNG DER HIERIN BESCHRIE-
BENEN PRODUKTE ODER ZUGEHÖRIGER TEILE KÖNNEN TOD, VERLETZUNGEN VON PERSONEN ODER SACHSCHÄDEN 5.2.5 PACHC einfügen (offline) 21
VERURSACHEN. 5.2.6 Kommunikation 22
Dieses Dokument und andere Informationen der Parker-Hannifin Corporation, ihren Tochtergesellschaften und Vertragshändlern enthalten
Produkt- oder Systemoptionen zur weiteren Untersuchung durch Anwender mit technischen Kenntnissen. 5.2.7 Steuerwerte 22
Der Anwender ist durch eigene Untersuchung und Prüfung allein dafür verantwortlich, die endgültige Auswahl des Systems und der 5.2.8 Statuswerte 22
Komponenten zu treffen und sich zu vergewissern, dass alle Leistungs-, Dauerfestigkeits-, Wartungs-, Sicherheits- und Warnanforde- 5.3 Konfiguration 23
rungen der Anwendung erfüllt werden. Der Anwender muss alle Aspekte der Anwendung genau untersuchen, geltenden Industrienormen
folgen und die Informationen in Bezug auf das Produkt im aktuellen Produktkatalog sowie alle anderen Unterlagen, die von Parker oder 5.3.1 Einheit 25
seinen Tochtergesellschaften oder Vertragshändlern bereitgestellt werden, zu beachten. 5.3.2 Richtungssinn 25
Soweit Parker oder seine Tochtergesellschaften oder Vertragshändler Komponenten oder Systemoptionen basierend auf technischen
5.3.3 Applikation 25
Daten oder Spezifikationen liefern, die vom Anwender beigestellt wurden, ist der Anwender dafür verantwortlich festzustellen, dass
diese technischen Daten und Spezifikationen für alle Anwendungen und vernünftigerweise vorhersehbaren Verwendungszwecke der 5.3.4 Zylinder 26
Komponenten oder Systeme geeignet sind und ausreichen. 5.3.5 Wegmesssystem 27
5.3.5.1 SSI Binär / SSI Gray Code 27
5.3.5.2 Encoder TTL / Encoder HTL / Encoder RS422 28
5.3.5.3 Analoggeber 28
5.3.5.4 EtherCAT-Geber 29
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
2 3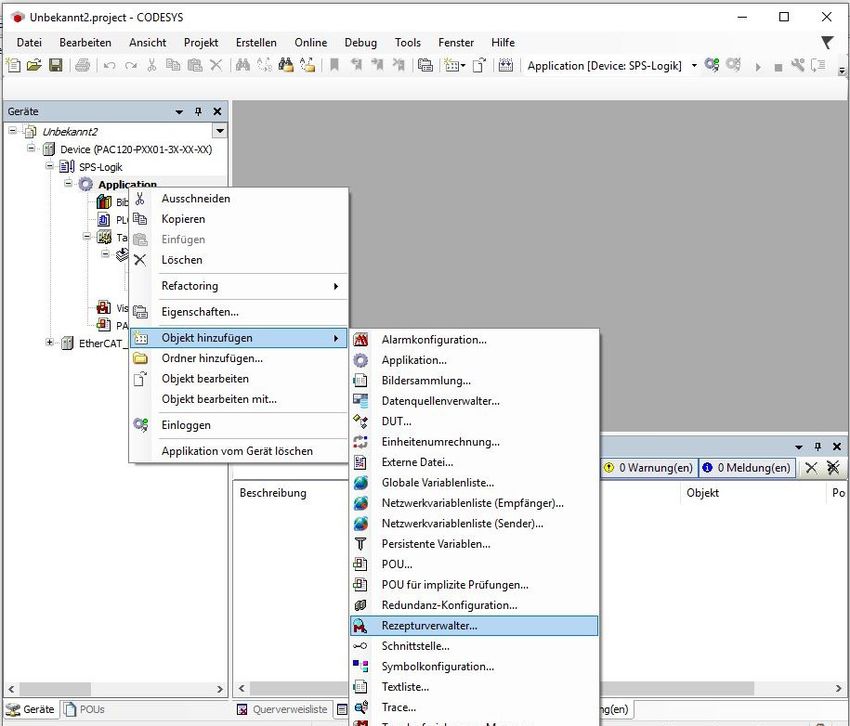
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inhalt Serie PACHC Inhalt
5.3.6 Drucksensoren 30 6.6 Stop (PACHC_Stop) 50
5.3.7 Kraftsensor 31 6.6.1 Stop bei Druck/Kraft-Regelung 51
5.3.8 Ventile 32 6.6.2 Stop: Beispiel 1 51
5.4 Optimierung 33 6.6.3 Stop: Beispiel 2 52
5.4.1 Reglerfunktionen 33 6.6.4 Ruckbeschreibung 52
5.4.2 Positionsregler 34 6.6.5 Ruckfrei nach VDI2143 52
5.4.2.1 Reglerstruktur 34 6.7 Absolute Positionierung (PACHC_MoveAbsolute) 53
5.4.2.2 Einstellwerte 35 6.8 Relative Positionierung (PACHC_MoveRelative) 54
5.4.3 Kraft-/Druckregler 36 6.9 Kraft/Druck stellen (PACHC_PressureForceAbsolute) 56
5.4.3.1 Reglerstruktur 36 6.10 Endlose Positionierung (PACHC_MoveVelocity) 56
5.4.3.2 Einstellwerte 37 6.11 Direktes Positionieren (PACHC_DirectDynamicPositioning) 58
5.4.2 Analogeingänge 38 6.12 Direktes Anfahren eines Druck-/Kraftsollwertes (PACHC_DirectDynamicPressureForce) 58
5.4.3 Linearisierung 39 6.13 Positionierung mit überlagerter Kraftregelung (PACHC_PositionForceAbsolute) 59
5.4.3.1 Richtungsabhängige Verstärkung 39 6.14 Handbetrieb (PACHC_Jog) 60
5.4.3.2 Invertierung 39 6.15 Handbetrieb (PACHC_Jog_Force) 61
5.4.3.3 Totbandkompensation 39 6.16 Maschinennull (PACHC_Home) 61
5.4.3.4 Stellgrößenbegrenzung 40 6.17 Abfahren eines Sollprofiles (PACHC_MoveProfile) 62
5.4.3.5 Einstellwerte 40 6.18 Synchronlauf von 2 Achsen (PACHC_2Axes_Synchronization) 63
5.5 Überwachung und Fehlerhandling 41 6.19 Synchronlauf von 4 Achsen (PACHC_4Axes_Synchronization) 64
5.5.1 Fehlerreaktion 41 6.20 Synchronregler für 2 Achsen (PACHC_2Axes_SyncController) 65
5.5.2 Schleppfehlerüberwachung 41 6.21 Synchronregler für 4 Achsen (PACHC_4Axes_SyncController) 66
5.5.3 Verfahrbereichsgrenzen 41 6.22 Analoge Ausgänge schreiben (PACHC_Analog_Out) 67
5.5.4 Überwachung maximale Geschwindigkeit 41 6.23 Fehlerreaktion festlegen (PACHC_SetErrorReaction) 67
5.5.5 Überwachung maximale Kraft 41 6.24 Aktuelle Fehlernummer auslesen (PACHC_ReadAxisError) 68
5.5.6 Dialog Positionsüberwachung 42 6.25 Aktuellen Gerätezustand, DeviceState auslesen (PACHC_ReadStatus) 68
5.5.7 Dialog Kraft / Druck 43 6.26 Lesen und Schreiben von Parametergruppen 39
5.5.8 Dialog Fehlerhistorie 43 7 Diagnose 70
5.6 Parameter laden / speichern 44 7.1 Fehler 70
5.7 Typische Vorgehensweise zur Reglerinbetriebnahme 45 7.2 Fehlerspeicher 70
6 Programmierung 46 7.3 Firmware-Update 70
6.1 PACHC Bibliothek 46 8 Wartung / Instandhaltung 72
6.2 PLCopen motion control 46 8.1 Allgemeines 72
6.2.1 Zustandsdiagramm 47 8.2 Wartungsarbeiten 72
6.3 Generelle Regeln / Timing 47 8.3 Instandhaltung 72
6.3.1 Zugriff auf PACHC Parameter 47 8.4 Reparaturen / Kundendienst 72
6.3.2 Positionieren und Kraft/Druck stellen 48 8.5 Gewährleistung 72
6.3.3 Dynamische Umschalten zwischen Positions- auf Kraft-/Druckregelung 48 8.6 Außerbetriebnahme 72
6.3.4 Status der Ausgänge 48 9 Bestellschlüssel 73
6.3.5 Eingangsparameter 48 10 Technische Daten 73
6.3.6 Fehlende Eingangsparameter 48 11 Zubehör 74
6.3.7 Position und Distance 48 12 Anhang 75
6.3.8 Vorzeichen 48 Mapping 75
6.3.9 Fehlerhandling 48 Achs- und Geräteparameter 76
6.3.10 Verhalten des "Done"-Ausgangs 48 Fehlermeldungen 82
6.3.11 Verhalten des "CommandAborted"-Ausgangs 48 Objektverzeichnis 83
6.4 Aktivieren des Antriebs (PACHC_Power) 49 Startparameter 107
6.5 Quittieren von Fehlern (PACHC_Reset) 49 Index 108
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
4 5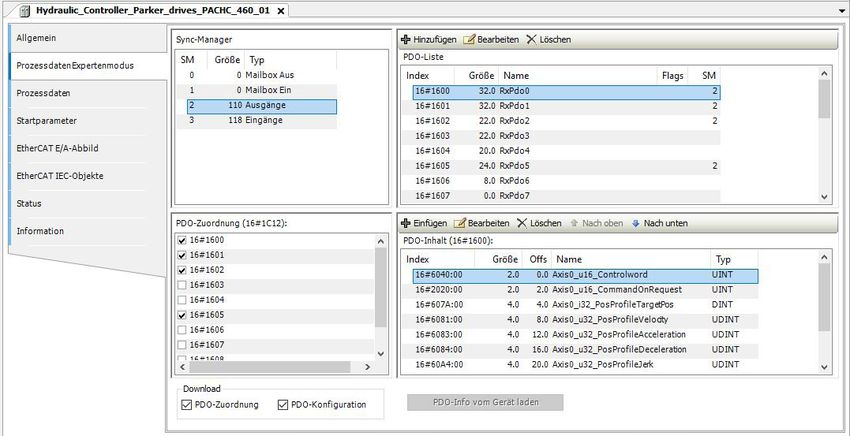
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Vorbemerkungen Serie PACHC Einleitung
1. Vorbemerkungen 2. Einleitung
1.1 Haftungsausschluss 2.1 Gerätezuordnung
Wir haben den Inhalt dieser Publikation auf Übereinstimmung mit der zugeordneten Hard- und Software geprüft. Dieses Handbuch gilt für folgendes Gerät:
Abweichungen können jedoch nicht ausgeschlossen werden, sodass wir für die vollständige Übereinstimmung kei-
• PACHC
ne Gewähr übernehmen. Die Angaben in dieser Publikation werden regelmäßig überprüft, notwendige Korrekturen
sind in den nachfolgenden Versionen enthalten. 2.2 Typenschild PACHC
1.2 Produktionsstätte Die genaue Bezeichnung des Geräts finden Sie auf dem Typenschild:
Parker Hannifin Manufacturing Germany GmbH & Co. KG
Industrial Systems Division Europe Erläuterung des Typenschilds
1
Gutenbergstraße 38
2 1 EtherCAT Logo
41564 Kaarst (Germany) 3
Tel.: +49 (0) 2151 513-0 2 QR Code
4
Fax: +49 (0) 2151 513 260
3 CE-Konformität
Internet: www.parker.com/ISDE
E-Mail: valvesisde@parker.com 4 UL zertifiziert
Parker Hannifin Manufacturing Germany GmbH & Co. KG · Sitz: Bielefeld · Amtsgericht: Bielefeld HRA 15699 5
5 Hersteller Logo
Persönlich haftende Gesellschafterin: Parker Hannifin GmbH · Sitz: Bielefeld · Amtsgericht: Bielefeld HRB 35489
Geschäftsführung der Parker Hannifin GmbH: Dr.-Ing. Hans-Jürgen Haas, Kees Veraart 6 Gerätebezeichnung
6
Vorsitzender des Aufsichtsrates: Dr.-Ing. Gerd Scheffel 7
8 7 Eingangsbereich analoge Eingänge
9
1.3 Hinweis auf Online-Version 10 8 Ausgangsbereich analoge Ausgänge
11
Dieses Handbuch wird regelmäßig aktualisiert. Die aktuellste Version finden Sie auf unserer Homepage www.par- 12 9
Unterstützte Schnittstellen für Positions-
ker.com/ISDE unter „Support“. geber
10 max. Umgebungstemperatur
1.4 Eingetragene Warenzeichen
11 Versorgungsspannung
Microsoft®, Windows® und das Windows® Logo sind eingetragene Warenzeichen der Microsoft Corp. in den USA
und anderen Ländern. EtherCAT® ist ein eingetragenes Warenzeichen und patentierte Technologie, lizenziert von 12 Steckerbelegung
Beckhoff Automation GmbH, Deutschland.
13 Hersteller-Adresse
CODESYS V3© ist ein Produkt der 3S-Smart Software GmbH.
13
1.5 Urheberschutz / Copyright
Diese Bedienungsanleitung ist urheberrechtlich geschützt. Typenschild auf der rechten Seitenwand
Die Wiedergabe und Vervielfältigung in jeglicher Art und Form, ganz oder auch auszugsweise, ist ohne schriftliche Seriennummernetikett auf dem Aluminiumträger
Genehmigung der Parker Hannifin Manufacturing Germany GmbH & Co. KG nicht gestattet.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
6 7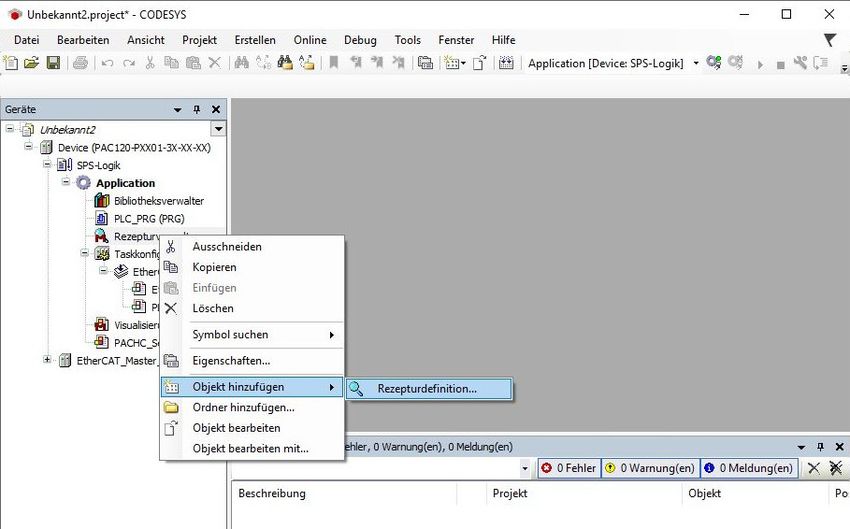
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Sicherheitshinweise Serie PACHC Gefahren
2.3 Sicherheitshinweise 2.3.5 Sicherheitsbewusstes Arbeiten
2.3.1 Zielgruppe dieses Handbuchs Das Gerät darf nur von qualifiziertem Personal eingesetzt werden.
Das vorliegende Handbuch enthält die notwendigen Informationen für den bestimmungsgemäßen Gebrauch des Qualifiziertes Personal im Sinne dieser Betriebsanleitung sind Personen, die:
beschriebenen Produkts (Steuergerät, Bedienterminal, Software usw.). Es wendet sich an Fachpersonal aus Kon-
struktion, Projektierung, Service und Inbetriebnahme. Zum richtigen Verständnis und zur fehlerfreien Umsetzung • aufgrund ihrer Ausbildung, Erfahrung und Unterweisung sowie ihrer Kenntnisse über einschlägige Normen, Be-
der technischen Beschreibungen, Bedieninformationen und insbesondere Gefahren- und Warnhinweise werden stimmungen, Unfallverhütungsvorschriften und Betriebsverhältnisse von dem für die Sicherheit der Anlage Ver-
umfassende Kenntnisse in der Automatisierungstechnik vorausgesetzt. antwortlichen berechtigt worden sind, die jeweils erforderlichen Tätigkeiten auszuführen und dabei mögliche
Gefahren kennen und vermeiden (Definition der Fachkräfte laut VDE 105 oder IEC 364),
2.3.2 Gefahren- und Warnhinweise
• Kenntnisse über Erste-Hilfe-Maßnahmen und die örtlichen Rettungseinrichtungen haben, die Sicherheitshin-
Bitte beachten Sie die zusätzlichen Hinweise, die wir in diesem Handbuch durch Symbole gekennzeichnet haben. weise gelesen haben und beachten,
Einige dieser Hinweise machen auf Gefahren aufmerksam, andere dienen mehr der Orientierung. In der Reihenfol-
• die Betriebsanleitung bzw. die Hilfe (bzw. den für die auszuführenden Arbeiten entsprechenden Teil) gelesen
ge abnehmender Wichtigkeit sind sie weiter unten beschrieben.
haben und beachten.
Der Inhalt in den Gefahren- und Warnhinweisen ist wie folgt gegliedert: Dies gilt für alle Arbeiten, die das Aufstellen, die Inbetriebnahme, das Konfigurieren, das Programmieren, das Än-
Art und Quelle der Gefahr dern der Einsatzbedingungen und Betriebsarten und die Wartung betreffen.
Mögliche Folgen bei Nichtbeachtung Die Betriebsanleitung bzw. die Hilfe müssen bei allen Arbeiten am Gerät verfügbar sein.
à Maßnahmen zur Vermeidung 2.3.6 Spezielle Sicherheitshinweise
• Prüfen Sie die Zuordnung von Gerät und Dokumentation.
GEFAHR • Lösen Sie die elektrischen Anschlüsse nie unter Spannung.
GEFAHR verweist auf eine unmittelbar gefährliche Situation, die bei Missachtung des Hinweises unabwendbar zu einem schwe- • Durch Sicherheitseinrichtungen muss verhindert werden, dass bewegte oder rotierende Teile berührt werden
ren oder tödlichen Unfall führen wird. können.
• Achten Sie darauf, dass das Gerät nur in einwandfreiem Zustand betrieben wird.
VORSICHT • Implementieren Sie Sicherheits-Funktionen.
VORSICHT verweist auf eine eventuell gefährliche Situation, die bei Missachtung des Hinweises möglicherweise zu einem Unfall • Betreiben Sie das Gerät nur mit geschlossenem Gehäuse.
oder zu Beschädigungen an diesem Gerät oder anderen Geräten führen kann.
• Achten Sie darauf, dass alle Geräte ausreichend befestigt sind.
Bei Projektierung beachten:
HINWEIS
• Versorgung 24 V DC: Erzeugung als sicher elektrisch getrennte Kleinspannung. Geeignet sind z. B. Transfor-
HINWEIS verweist auf eine möglicherweise gefährliche Situation, die bei Missachtung des Hinweises möglicherweise zu Beschä- matoren mit getrennten Wicklungen, die nach EN 60742 (entspricht VDE 0551) aufgebaut sind.
digungen an diesem Gerät oder anderen Geräten führen kann.
• Bei Spannungsausfällen bzw. -einbrüchen: Das Programm muss so aufgebaut werden, dass beim Neustart ein
definierter Zustand hergestellt wird, der gefährliche Zustände ausschließt.
2.3.3 Allgemeine Gefahren
• Not-Aus-Einrichtungen müssen nach EN 60204/IEC 204 (VDE 0113) realisiert werden und jederzeit wirksam
Das beschriebene Gerät ist nach dem Stand der Technik gebaut und betriebssicher. Dennoch können von dem Ge-
sein.
rät Gefahren ausgehen, wenn es unsachgemäß oder zu nicht bestimmungsgemäßem Gebrauch eingesetzt wird.
• Die für den spezifischen Einsatzfall geltenden Sicherheits- und Unfallverhütungsvorschriften sind zu beachten.
Durch spannungsführende, bewegte oder rotierende Teile kann
• Beachten Sie bitte insbesondere die Gefahrenhinweise, die jeweils an geeigneter Stelle auf mögliche Fehler-
• Gefahr für Leib und Leben des Benutzers und quellen aufmerksam machen sollen.
• materieller Schaden • In jedem Fall sind die einschlägigen Normen und VDE-Vorschriften einzuhalten.
drohen. • Bedienelemente so installieren, dass unbeabsichtigte Betätigung ausgeschlossen ist.
2.3.4 Bestimmungsgemäßer Gebrauch • Steuerleitungen so verlegen, dass keine Einstreuungen (induktiv oder kapazitiv) auftreten, die die Funktion des
Parker Produkte sind für den gewöhnlichen Einsatz in der Industrie entworfen, entwickelt und hergestellt worden Steuergeräts beeinflussen können.
und dürfen nur für die im Katalog und in der zugehörigen technischen Dokumentation vorgesehenen Einsatzfälle Bei Instandhaltung oder Wartung beachten:
verwendet werden. Der einwandfreie und sichere Betrieb der Produkte setzt sachgemäßen Transport, sachgemä-
• Bei Mess- und Prüfarbeiten am eingeschalteten Steuergerät ist die Unfallverhütungsvorschrift VBG 4.0 zu be-
ße Lagerung, Aufstellung, Montage, Installation, Inbetriebnahme, Bedienung und Instandhaltung voraus. Die zu-
achten, insbesondere § 8 (Zulässige Abweichungen beim Arbeiten an Teilen).
lässigen Umgebungsbedingungen müssen eingehalten werden. Hinweise in den zugehörigen Dokumentationen
müssen beachtet werden. • Reparaturen dürfen nur von Parker Fachpersonal durchgeführt werden. Andernfalls erlischt jede Gewährleis-
tung.
Das Gerät ist für den Einsatz in Starkstromanlagen konstruiert (VDE0160). Mit dem Gerät können Bewegungsab-
• Nur solche Ersatzteile verwenden, die von Parker zugelassen sind. In den modularen Steuergeräten dürfen nur
läufe automatisiert werden. Durch Zusammenschalten von mehreren Geräten lassen sich mehrere Bewegungsab-
Parker Originalmodule eingesetzt werden.
läufe miteinander kombinieren. Dabei müssen gegenseitige Verriegelungen eingebaut werden.
• Bei modularen Systemen: Module dürfen nur im spannungslosen Zustand in die Steuerung gesteckt bzw. her-
ausgezogen werden. Sie können sonst zerstört oder aber in ihrer Funktion (evtl. nicht sofort erkennbar!) beein-
trächtigt werden.
• Batterien und Akkumulatoren, sofern vorhanden, nur als Sondermüll entsorgen.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
8 9
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Elektromagnetische Verträglichkeit Serie PACHC Elektromagnetische Verträglichkeit
2.4 Elektromagnetische Verträglichkeit
Definition Installationsort
Elektromagnetische Verträglichkeit ist die Fähigkeit eines Gerätes, in der elektromagnetischen Umwelt zufrieden- Achten Sie darauf, dass hinsichtlich Temperatur, Verunreinigungen, Stoß, Schwingung und elektromagnetischem
stellend zu arbeiten, ohne dabei selbst elektromagnetische Störungen zu verursachen, die für andere in dieser Um- Einfluss keinerlei Beeinträchtigungen auftreten.
welt vorhandene Geräte unannehmbar wären.
Temperatur
Von allen bekannten elektromagnetischen Störphänomenen tritt je nach Einsatzort eines betreffenden Gerätes nur
ein entsprechender Teil von Störungen auf. Diese Störungen sind in den entsprechenden Produktnormen festgelegt. Beachtung von Wärmequellen wie z. B. Raumbeheizung, Sonnenstrahlung, Wärmestau in Montageräumen und
Steuerschränken.
Für den Aufbau und die Störfestigkeit speicherprogrammierbarer Steuerungen gilt international die Norm
Verunreinigungen
IEC 61131-2, die auf europäischer Ebene in die Norm
Verwendung entsprechender Gehäuse, um mögliche nachteilige Beeinflussung durch Feuchtigkeit, korrosive Gase,
EN 61131-2 umgesetzt worden ist. Flüssigkeiten und leitfähigen Staub zu vermeiden.
HINWEIS Stoß und Schwingungen
Allgemeine Installationsvorschriften, die eingehalten werden müssen, um die Kopplungsfaktoren und folglich Störspannungen auf Beachtung möglicher Beeinflussung durch Motoren, Kompressoren, Transferstraßen, Pressen, Rammen und Fahr-
Pegel, denen standgehalten werden kann, zu begrenzen, sind in IEC 61131-4, Leitfaden für Anwender, enthalten. zeuge.
Störemission Elektromagnetischer Einfluss
Störaussendung elektromagnetischer Felder, HF nach EN 55011, Grenzwertklasse A, Gruppe 1 Beachtung elektromagnetischer Störungen aus verschiedenen Quellen am Standort: Motoren, Schaltvorrichtun-
gen, Schaltthyristoren, funkgesteuerte Geräte, Schweißgeräte, Lichtbögen, Schaltnetzteile, Leistungswandler/-
HINWEIS Wechselrichter.
Soll das Steuergerät in Wohngebieten eingesetzt werden, muss bezüglich der Störaussendung die Grenzwertklasse B nach EN Besondere Störquellen
55011 eingehalten werden. Dieses kann u. U. durch Einbau der Steuerung in geerdete Metallschränke und durch Einbau von Fil-
tern in die Versorgungsleitungen erreicht werden. Induktive Aktuatoren
Beim Abschalten von Induktivitäten (z. B. von Relaisspulen, Schützen, Magnetventilen und Betätigungsmagne-
Allgemeine Installationshinweise
ten) entstehen Überspannungen. Es ist erforderlich, diese Störspannungen auf ein zulässiges Maß zu bedämpfen.
Elektronische Steuerungssysteme als Bestandteil von Maschinen, Anlagen und Systemen erfordern je nach Ein-
Bedämpfungselemente können Dioden, Z-Dioden, Varistoren und RC-Glieder sein. Für die geeignete Dimensionie-
satzgebiet die Berücksichtigung geltender Regeln und Vorschriften.
rung sind die technischen Angaben des Herstellers oder Lieferanten der Aktuatoren zu beachten.
Allgemeine Anforderungen an die elektrische Ausrüstung von Maschinen mit dem Ziel der Sicherheit von Maschi-
nen sind in der Norm EN 60204 Teil 1 (entspricht VDE 0113) enthalten.
Schutz vor äußeren elektrischen Einwirkungen
Steuerungssystem, wenn vorgesehen, zur Ableitung von elektromagnetischen Störungen an den Schutzleiter bzw.
Funktionserder anschließen. Günstige Leitungsführung sicherstellen.
Leitungsführung
Getrennte Verlegung von Energiestromkreisen, nicht gemeinsam mit Steuerstromkreisen:
• Gleichspannung 60 V ... 400 V
• Wechselspannung 25 V ... 400 V
Gemeinsame Verlegung von Steuerstromkreisen möglich:
• Datensignale, abgeschirmt
• Analogsignale, abgeschirmt
• Digitale E/A-Leitungen, ungeschirmt
• Gleichspannungen < 60 V, ungeschirmt
• Wechselspannung < 25 V, ungeschirmt
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
10 11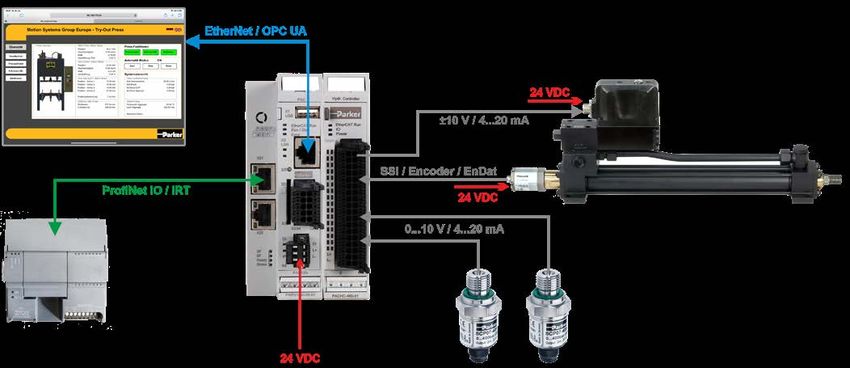
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Gerätebeschreibung Serie PACHC Gerätebeschreibung
3. Systembeschreibung 4.4 Front- und Seitenansicht
3.1 PAC
Parker PAC ist ein System von Regel- und I/O-Modulen für den Anschluss der Prozesssignale in einem EtherCAT-
Netzwerk.
3.2 Entwicklungsumgebung CODESYS V3.5
Für den Einsatz des PACHCs ist die Entwicklungsumgebung CODESYS V3.5 mit Service Pack 16 erforderlich.
4. Gerätebeschreibung
4.1 PACHC
Der PACHC ist eine Reglerbaugruppe zur hochdynamischen Regelung von 1-2 hydraulischen Achsen. Er wurde
für den Betrieb an einem Parker Automation Controller (PAC) entwickelt. Das Gerät ist ein EtherCAT-Slave und wird
am Parker E-Bus betrieben. Es lässt sich in Verbindung mit dem Buskoppler PACIO-400-00 auch in einem Stan-
dard-EtherCAT-Netz betreiben.
4.5 Steckerübersicht
Die Anschlussebene für alle externen Anschlüsse befindet sich frontseitig auf dem Gerät. Die Anschaltung an ein
PAC120/PAC320 System erfolgt über das an der linken Seite befindliche EtherCAT E-Bus Interface. Über das rech-
te EtherCAT E-Bus-Interface unter der abnehmbaren Abdeckung können weitere PACHC- und PACIO-Module an-
geschlossen werden.
Alternative Funktion
Pin Belegung Belegung Pin
SSI EnDAT
1 AIN_I/U_0+ AIN_I/U_2+ 19
2 AIN_I/U_0- AIN_I/U_2- 20
3 AIN_I/U_1+ AIN_I/U_3+ 21
An den PACHC werden lokal analoge Sensoren wie Druck- und Kraftsensoren und digitale Wegmesssysteme zur 4 AIN_I/U_1- AIN_I/U_3- 22
Erfassung von Istwerten angeschlossen. Über die analogen Ausgänge werden Hydraulikventile angesteuert.
5 Versorgungsspannung Wegmesssystem 0 V Versorgungsspannung Wegmesssystem 0 V 23
Eigenschaften:
Versorgungsspannung Wegmesssystem Versorgungsspannung Wegmesssystem
• Positions-, Kraft- und Druckregelung für 1-2 Achsen 6 24
5V / 150 mA 5V / 150 mA
• Abtastzeit 250 µs 7 Encoder_0_A+ SSI_CLK+ EnDAT_CLK+ Encoder_1_A+ 25
• 2 digitale Schnittstellen für Wegmesssysteme (SSI, Encoder TTL/HTL/RS422, EnDAT) 8 Encoder_0_A - SSI_CLK- EnDAT_CLK- Encoder_1_A - 26
• 4 Analogeingänge (0..10 V, 0..20 mA) 9 Encoder_0_B+ SSI_DAT+ EnDAT_DAT+ Encoder_1_B+ 27
• 4 Analogausgänge (-10..10 V, 0..20 mA) 10 Encoder_0_B - SSI_DAT- EnDAT_DAT- Encoder_1_B - 28
• Ausfallsichere Speicherung aller Geräteparameter im Flash 11 Encoder_0_N+ EnDAT_CNT+ Encoder_1_N+ 29
• Bibliothek mit umfangreichen Bewegungsfunktionen 12 Encoder_0_N - EnDAT_CNT- Encoder_1_N - 30
13 AOUT_I/U0+ AOUT_I/U2+ 31
4.2 Auslieferungszustand/Lieferumfang
14 AOUT_I/U0- AOUT_I/U2- 32
Der Lieferumfang des PACHC besteht aus:
15 AOUT_I/U1+ AOUT_I/U3+ 33
• PACHC
16 AOUT_I/U1- AOUT_I/U3- 34
• Stecker
17 L+ 24 VDC L+ 24 VDC 35
4.3 Einsatzbereich 18 L- 0V L- 0V 36
Das Gerät ist nur für den Betrieb in geschlossenen Schaltschränken oder Räumen zugelassen. Die Abwärme des
Gerätes entwickelt sich im am Seitenteil, dem Aluminium Kühlkörper. Es ist eine ausreichende Belüftung des Ein-
baubereiches zu gewährleisten.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
12 13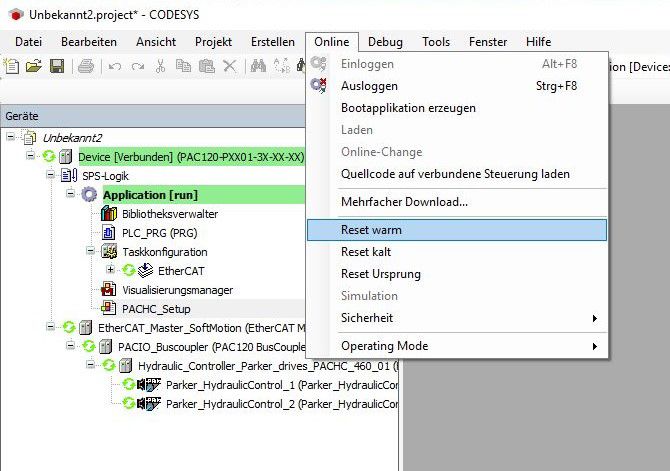
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Gerätebeschreibung Serie PACHC Inbetriebnahme
4.6 Anzeige und Bedienelemente 5. Inbetriebnahme
4.6.1 Statusanzeigen Dieses Kapitel beschreibt die Konfiguration und Inbetriebnahme für den Betrieb des PACHC an einem PAC.
Die Statusanzeigen geben Auskunft über den Zustand der Baugruppen des PACHC.
5.1 Montage/Installation
EtherCAT Run 5.1.1 Mechanische Installation
Status LED, Blinkcode Bedeutung à Die PAC120/PACHC/PACIO Module sind für die Montage auf Tragschie-
Init aus Status: Initialisation, kein Datenaustausch nen (nach DIN EN 50022, 35 x 7,5 mm) bestimmt.
Pre-Op aus/grün 1:1 Status: Preoperational, kein Datenaustausch Aufrasten eines einzelnen Moduls
Safe-Op aus/grün 5:1 Safe operational, Eingänge lesbar à Führen Sie das Modul gemäß Abbildung so von unten gegen die Trag-
Op grün, dauerhaft Operational, kompletter Datenaustausch schiene, dass sich die Metallfeder zwischen Tragschiene und Montage-
fläche eindrückt.
Gerätestatus à Drücken Sie das Modul oben gegen die Montagewand, bis es einrastet.
Status LED, Blinkcode Bedeutung 2
Ok grün, dauerhaft kein Fehler Verbinden zweier Module
Fehler rot, blinkend Verbindungsfehler à Nachdem Sie das erste Modul auf der Tragschiene aufgerastet haben, ras-
Start, Defekt rot, dauerhaft Modul nicht initialisiert ten Sie das zweite Modul rechts in etwa 1 cm Abstand vom ersten Modul
auf die Tragschiene.
Spannungsversorgung à Schieben Sie das zweite Modul auf der Tragschiene an das erste Modul
heran, bis der Entriegelungshebel einrastet.
Status LED, Blinkcode Bedeutung
Trennen zweier Module
An grün 24VDC vorhanden
à Drücken Sie den Entriegelungshebel (siehe Abbildung 2) des Moduls, das 1
Aus aus 24VDC nicht vorhanden
Sie vom links davon befindlichen Modul trennen wollen. Bild 1:
Montage eines Moduls
à Schieben Sie gleichzeitig beide Module auf etwa 1 cm Abstand auseinan-
Analogeingänge
der.
Status LED, Blinkcode Bedeutung
3
Ok grün, dauerhaft kein Fehler 2
Entriegelung
Fehler rot Verbindungsfehler, Außerhalb des zulässigen Wertebereichs Abnehmen eines einzelnen Moduls
à Drücken Sie das Modul gegen die Metallfeder, die sich auf der Unterseite
Digitale Wegmesssysteme der Aufnahme befindet, nach oben.
Status LED Bedeutung à Schwenken Sie das Modul gemäß Abbildung von der Tragschiene weg
An grün Eingangssignal hoch nach vorn.
Aus aus Eingangssignal niedrig à Ziehen Sie das Modul nach unten aus der Tragschiene.
Analogausgänge
Status LED Bedeutung
An grün Analogausgang aktiv 1
Bild 2:
Aus aus Analogausgang inaktiv Demontage eines Moduls
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
14 15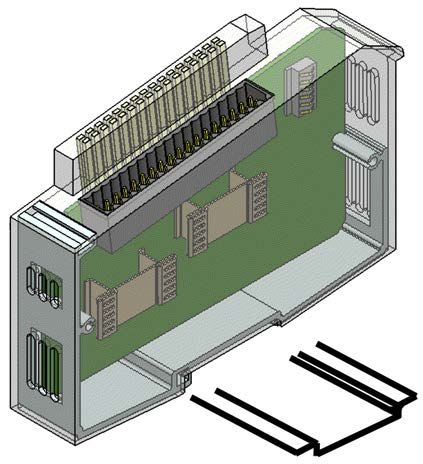
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.1.2 Elektrische Installation 5.2 Entwicklungsumgebung CODESYS V3.5
Erdung CODESYS V3.5 Installation auf dem Projektierungs-PC
Die PAC Module sind zu erden. Dazu ist das Metallgehäuse mit einer Funktionserde zu verbinden. CODESYS V3.5 ist ein geräteunabhängiges Steuerungsprogrammiersystem. In Übereinstimmung mit der Norm IEC
61131-3 unterstützt es alle Standard-IEC-Programmiersprachen und unterstützt objektorientierte Programmierung.
Die Funktionserde dient zur Ableitung von HF-Strömen und ist für die Störfestigkeit des Moduls von großer Be-
deutung. Zusammen mit dem CODESYS Control Win V3 Laufzeitsystem erlaubt es “Multi-Device”- und “Multi-Application”-
Programmierung. Die komponentenbasierte Struktur macht eine kundenspezifische Konfiguration und Erweiterung
HF-Störungen werden von der Elektronik-Platine auf das Metallgehäuse abgeleitet. Das Metallgehäuse braucht nun der Benutzeroberfläche möglich.
eine geeignete Verbindung mit einem Funktionserder.
Bevor Sie CODESYS V3.5 installieren, beachten Sie bitte die folgenden Hinweise zu den Sys-
Im Regelfall ist dafür zu sorgen, dass temvoraussetzungen:
• das Modulgehäuse gut leitend mit der Hutschiene verbunden ist, Windows XP / 7 / 8 / 10, geeignete PC-Hardware für die entsprechende Windows-Plattform.
• die Hutschiene gut leitend mit dem Schaltschrank verbunden ist,
• der Schaltschrank eine gute Erdung besitzt.
Im Sonderfall kann auch die Erdung direkt am Modul angeschraubt werden.
Gerätebeschreibung
Um ein Gerät mit dem IEC 61131-3 Entwicklungswerkzeug CODESYS V3.5 bedienen zu können, muss ihm das
Laufzeitsystem dieses Gerät mit seinen Eigenschaften bekannt machen.
Die Funktionen zum Verwalten von Gerätedefinitionen auf dem lokalen System und in Projekten werden vom 'De-
vice Repository' Plug-In bereitgestellt. Es liefert u. a. Befehle der Befehlskategorie 'Geräte', die standardmäßig im
Hier Kabelschirm auflegen
à Öffnen Sie das 'Geräte Repository...' im Menü 'Tools'
à Der Dialog Geräte-Repository wird gestartet
à Erweitern Sie den Baum mit der Bezeichnung 'EtherCAT-Slave'
Das Geräte-Repository ist die Datenbank für Gerätebeschreibungen, die auf dem lokalen System installiert sind,
um für das Programmieren im CODESYS verfügbar zu sein. Das Installieren und Deinstallieren der Geräte wird im
Geräte-Repository selbst vorgenommen.
Im Fenster 'Installierte Gerätebeschreibungen' werden die bereits installierten Geräte jeweils mit Angabe von „Name“,
„Hersteller“ und „Version“ des Geräts angezeigt. Die „Äste“ können mit Hilfe der Plus- und Minus-Zeichen geöff-
net/geschlossen werden.
DIN-Hutschiene mit
Befestigung mit Bolzen M3x5 Funktionserder verbinden
HINWEIS
Erdungsleitungen sollen kurz sein und eine große Oberfläche haben. (Kupfergeflecht).
Hinweise finden Sie z. B. unter http://de.wikipedia.org/wiki/Masse_(Elektronik).
Verbindung zwischen den Modulen
Die elektrische Verbindung zwischen den PAC Modulen wird durch das Zusammenschieben der einzelnen Modu-
le erreicht. Der Anschluss an das EtherCAT Bussystem und die Spannungsversorgung der EtherCAT Kommunika-
tionsbausteine wird somit automatisch realisiert.
Bitte beachten Sie, dass die montierte Anzahl von PAC Modulen in einem Block durch den maximalen Abgabe-
strom des PAC120 begrenzt wird.
Logikversorgung (24 V DC)
Die Logikversorgung erfolgt über die Anschlüsse L+ und L- über den Modulstecker.
VORSICHT
Gefahr vor elektrischer Spannung
Eine Versorgungsspannung außerhalb des zulässigen Versorgungsspannungsbereichs kann das Gerät zerstören.
à Vergewissern Sie sich vor dem Einschalten der Versorgungsspannung, dass sich diese im zulässigen Spannungsbereich be-
findet.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
16 17
Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.2.1 Gerätebeschreibung installieren 5.2.2 Gerätespezifische Bibliotheken installieren
• Es müssen 3 Geräte eingefügt werden: Ähnlich wie die Gerätebeschreibungsdateien werden auch die Bibliotheken unter CODESYS in einem Repository
- HydraulicController_ParkerMotion_ETC_Parker.devdesc.xml verwaltet, und zwar im Bibliotheksrepository. Für den PACHC stehen folgende gerätespezifische Bibliotheken zur
- Parker_Drive_ETC_Parker_HydraulicControl1.devdesc.xml Verfügung:
- Parker_Drive_ETC_Parker_HydraulicControl2.devdesc.xml - PKR_PACHC
• Wird der PACHC zusammen mit der Softmotion von 3S verwendet, sind zusätzlich noch die Beschreibungen - SM3_Drive_ETC_Parker_HydraulicControl_Itfs
- HydraulicControl_CodesysSoftMotion_ETC_Parker.devdesc.xml - SM3 Drive ETC Parker Hydraulic Control
- SM3_Drive_ETC_ParkerControl1.devdesc.xml à Öffnen Sie das Bibliotheksepository im Menü 'Tools'
- SM3_Drive_ETC_ParkerControl2.devdesc.xml à Der Dialog Bibliotheksrepository wird gestartet
zu installieren.
• Das Gerät befindet sich unter 'Feldbusse à EtherCAT à Slave à Parker Hannifin – HydraulicControl'
• Die Achsen befinden sich im Baum 'SoftMotion Antriebe à EtherCAT Antriebe'.
Abbildung: Bibliothek-Repository
Verwenden Sie die Schaltfläche „Installieren...“, um eine Bibliothek neu auf dem lokalen System zu installieren und
Abbildung: PACHC in Geräte-Repository
sie so im Programmiersystem verfügbar zu machen.
Browsen Sie zu dem Ablageort, in dem Sie die Bibliotheken gespeichert haben. Der Filter steht auf „Übersetzte Bi-
bliotheken (*.compiled-library). In diesem Format werden die Bibliotheken in der Regel auch zur Verfügung gestellt.
Wählen Sie die zu installierende Bibliothek aus und betätigen Sie anschließend die Schaltfläche "Öffnen". Nach der
Installation wird die Bibliothek im Baum „Installierte Bibliotheken“ angezeigt.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
18 19Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.2.3 Verwendung von Projekttemplates 5.2.5 PACHC einfügen (offline)
Auf der Parker Internetseite des PACHC (http://ph.parker.com/us/17581/en/hydraulic-axis-controller-series-PACHC) EtherCAT Teilnehmer können auch offline hinzugefügt werden.
befinden sich Projektvorlagen für verschiedene Anwendungen, die als Startpunkt für eine eigene Programment- • Mit der rechten Maustaste auf das Gerät „PAC120_Buscoupler“ klicken
wicklung genutzt werden können. Die Vorlagen sind als Projektarchiv gespeichert und beinhalten alle erforderlichen
• Option „Gerät anhängen“ wählen
Gerätebeschreibungen und Bibliotheken. Beim Öffnen werden sie automatisch installiert, sodass die Arbeitsschrit-
te unter 4.2.1 und 4.2.2 entfallen.
5.2.4 PACHC einfügen (online)
Angeschlossene EtherCAT-Komponenten können vom PAC120 automatisch erkannt werden. Hierzu muss der PAC
mit dem Computer verbunden sein.
à Mit rechter Maustaste auf „EtherCAT_Master“ klicken.
à Gerät suchen
à Eine Liste mit angeschlossenen EtherCAT Slaves wird angezeigt. Falls ein Slave fehlt, stellen Sie sicher, dass
er angeschlossen und mit Strom versorgt ist und klicken Sie für einen erneuten Scan-Vorgang nochmals auf
„Gerät suchen“.
• Wählen Sie Parker Hannifin als Anbieter aus und wählen Sie den Hydraulic Controller (PACHC-460-01) aus. Kli-
cken anschließend Sie 'Gerät hinzufügen'.
• Das PACHC-Modul wird in den Objektbaum eingefügt und die benötigten Bibliotheken werden dem Projekt
hinzugefügt. Zusätzlich werden zwei Achsen mit dem Namen „Parker_HydraulicControl_x” erstellt und unter-
halb des Geräts in den Objektbaum eingefügt. Wenn Sie mit der rechten Maustaste auf die Achsen klicken und
„Umbenennen“ auswählen, können Sie den Namen ändern. Diese Achsnamen werden im Anwendungspro-
gramm als Referenz für die Funktionsblöcke und zum Zugriff auf Achsobjekte verwendet.
Wenn Sie die 3S Softmotion verwenden wollen, wählen Sie Hydraulic Controller Softmotion drives (PACHC-460-01)
statt des Hydraulic Controllers (PACHC-460-01) aus. Die beiden Achsen heißen in diesem Fall „SM3_Drive_ETC_
Parker_HydraulicControl_x”.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
20 21Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
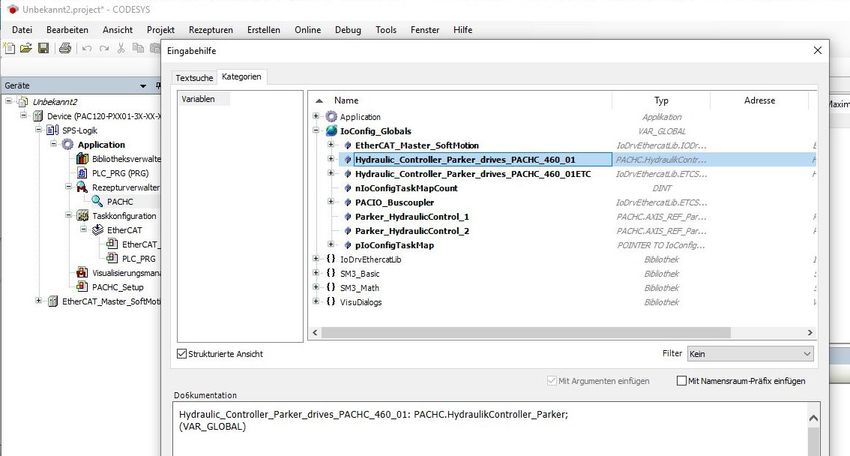
5.2.6 Kommunikation 5.3 Konfiguration
Der PACHC wird vollständig über die EtherCAT-Schnittstelle parametriert und betrieben. Am Gerät ist keine zusätz- Die Konfiguration und die Inbetriebnahme der an den PACHC angeschlossenen hydraulischen Achsen können über
liche Kommunikationsschnittstelle vorhanden. D.h. alle Parameter, die während der Konfiguration oder auch zur die Visualisierungsseite PACHC_Setup gesetzt werden. Hierzu muss die Visualisierung aus der PKR_PACHC-Bi-
Laufzeit vom IEC-Programm benötigt werden, werden über die Busschnittstelle ausgetauscht. Das Anwendungs- bliothek im Anwendungsprogramm in einem Frame auf einer Visualisierungsseite aufgerufen werden. Hierbei wird
programm kann über SDOs und PDOs auf alle Parameter des PACHCs zugreifen. der Visualisierung der jeweilige Gerätename des PACHC aus dem Objektbaum als Parameter übergeben.
Alle Parameter können ausfallsicher auf dem Gerät gespeichert werden. Hierzu ist ein zusätzlicher Speicherbe- Der Aufruf der Visualisierung erfolgt über den Visualisierungsmanager. Falls noch nicht im Projekt enthalten, fü-
fehl nötig. gen Sie ihn unter Applikation in den Objektbaum ein und fügen eine Webivisualisierung hinzu (à rechte Maustaste
Die Parameter können entweder direkt in der Entwicklungsumgebung über die Inbetriebnahmeoberfläche oder über à Objekt hinzufügen). Verknüpfen Sie anschließend die Visualisierung mit der Webvisualisierung und geben einen
Parameterlisten (Rezepte) gelesen und geschrieben werden. Namen für die Webseite an (z.B. pachc_setup).
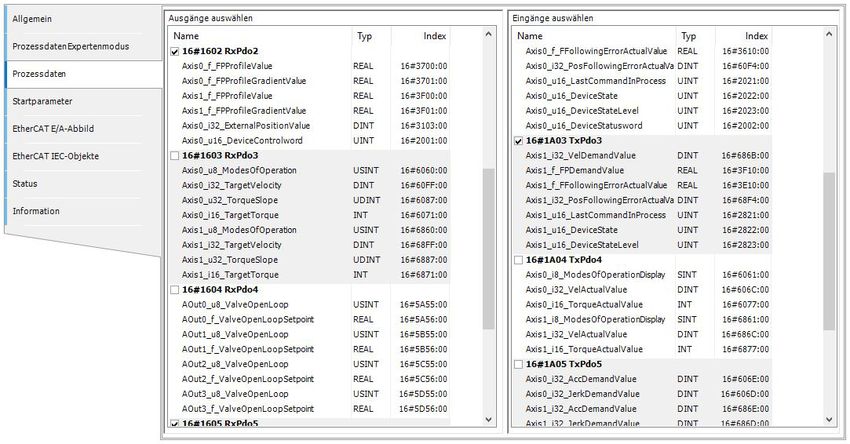
Die wichtigsten Ein- und Ausgangswerte werden zyklisch übertragen. Das Defaultmapping enthält alle erforderli- Die Konfigurationsoberfläche kann entweder innerhalb von CODESYS oder auch über einen Standard-Webbrow-
chen Werte. Die Werte, die nicht im PDO-Mapping enthalten sind, werden nur nach Bedarf als SDOs übertragen. ser genutzt werden.
Als Protokoll wird CAN over EtherCAT (CoE) verwendet.
Der PACHC unterstützt das Geräteprofil CiA 402: Device profile for drives and motion control. Zusätzlich zu den
Objekten nach CiA 402 sind weitere herstellerspezifische Objekte implementiert, die für die Funktionen der Parker
Bibliothek PACHC erforderlich sind.
5.2.7 Steuerwerte
Zur Ansteuerung des PACHCs werden zyklisch Steuerwerte wie beispielsweise Sollwerte vom PAC120/320 oder
einer vergleichbaren EtherCAT-Master-Steuerung an den PACHC übertragen. Diese Werte sind mit dem Prefix Rx
gekennzeichnet.
5.2.8 Statuswerte
Als Statuswerte werden die Werte bezeichnet, die einen bestimmten Status oder Zustand des Geräts bzw. des An-
triebs beschreiben. Alle Parameter, die vom PACHC an den EtherCAT-Master gesendet werden, haben das Prefix Tx.
Um die Konfigurationsseite innerhalb von CODESYS zu nutzen, verbinden Sie sich mit dem PAC120/320 und öff-
nen die eingefügte Visualisierung aus dem Projektbaum mit einem Doppelklick.
Beim Webbrowser geben Sie die IP-Adresse '8080/Name_der_Webseite.htm' ein, um die Konfigurationsseite zu
starten. Als IP-Adresse ist die Adresse des verwendeten PAC120 oder PAC320 einzutragen.
Die IP-Adresse kann in CODESYS ausgelesen werden (Gerät à Log). Die Werkseinstellung der IP-Adresse finden
Sie in der jeweiligen PAC Gerätedokumentation.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
22 23Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.3.1 Einheit
In beiden Fällen muss ein aktives Projekt auf dem PAC120/320 vorhanden sein und das Gerät sich im Status Run Alle Werte werden, soweit sinnvoll, in physikalischen Einheiten dargestellt. Es wird das Metrische System mit den
befinden. Ein Beispielprogramm kann als Vorlage von der Produkt-Homepage http://ph.parker.com/us/17581/en/ Einheiten bar, kg, m, mA, N und V verwendet.
hydraulic-axis-controller-series-PACHC geladen werden.
5.3.2 Richtungssinn
Um die Konfiguration des PACHCs zu starten, klicken Sie auf die Schaltfläche "Konfiguration".
Der Richtungssinn des PACHCs wurde so festgelegt, dass bei ansteigendem Wegsignal der Zylinder ausfährt. Hierzu
fließt ein Volumenstrom zur größeren Fläche des Zylinders (A) und ein Volumenstrom von der kleineren Fläche (B) ab.
Wird die größere Fläche des Zylinders (A) mit Druck beaufschlagt und die kleinere Fläche (B) entlastet, baut der Zy-
linder eine positive Kraft auf.
In beiden Fällen öffnet das Ventil bei positivem Ansteuersignal P nach A und B nach T.
Wegsignal
0 + Bewegung / Kraft
- +
A B
P T
Sollwertsignal
Der Richtungssinn des Wegmesssystems und des Ventils kann in der Konfiguration so verändert werden, dass das
Soll eine bestehende Gerätekonfiguration geändert werden, muss sie zuerst gelesen werden. Mit der Schaltfläche Verhalten der obengenannten Definition entspricht.
"Laden von PACHC" werden alle Einstellwerte vom Gerät ausgelesen.
Nachfolgend werden die einzelnen Schritte der Konfiguration beschrieben. 5.3.3 Applikation
Anhand des Applikationstyps wird die Darstellung des Hydrauliksystems im Inbetriebnahme-Tool
Applikationstyp
ausgewählt.
Der Wert gibt den maximalen Versorgungsdruck während des normalen Betriebs an. Über diesen Wert
Max. Versorgungsdruck
wird die maximale Geschwindigkeitsverstärkung des Ventils berechnet.
Hiermit ist der Wert der maximalen vom Zylinder zu bewegenden Masse inklusive Kolbenstange ge-
Max. Masse
meint. Der Wert wird für die Eigenfrequenzberechnung der Achse benötigt.
Über das Listenfeld wird der Typ des Kraft-/Druckreglers ausgewählt. Es kann entweder die Kraft, der
Kraft-/Druckregler
Differenzdruck in Abhängigkeit des Flächenverhältnisses oder der Druck pA oder pB geregelt werden.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
24 25Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.3.4 Zylinder 5.3.5 Wegmesssystem
Als Wegmesssystem können Geber mit den folgenden Schnittstellen verwendet werden:
• SSI Binär
• SSI Gray Code
• Encoder TTL
• Encoder HTL
• Encoder RS422
• EnDat 2.2
• Analog
• EtherCAT (via Master)
5.3.5.1 SSI Binär / SSI Gray Code
Kolbendurchmesser [mm] Der Wert gibt den Kolbendurchmesser des Zylinders an.
Der Wert gibt den Stangendurchmesser auf der Seite mit der größeren Zylinderfläche an. Bei Diffe-
Stangendurchmesser A [mm]
rentialzylindern ist dieser Wert Null.
Stangendurchmesser B [mm] Der Wert gibt den Stangendurchmesser auf der Seite mit der kleineren Zylinderfläche an.
Der Wert gibt den max. Hub des Zylinders an. Der tatsächliche Hub in der Anwendung ist üblicher-
Kompletter Zylinderhub [mm]
weise deutlich kleiner.
Der Wert gibt den Lagewinkel des Zylinders in Grad an. 90° bedeutet, der Zylinder steht senkrecht
Orientierung [°]
und die Kolbenstange (B-Seite) zeigt nach oben.
Der Wert gibt die maximal zulässige Geschwindigkeit des Zylinders an. Im Betrieb überwacht der
Max. zulässige Geschwindigkeit [mm/s] PACHC die Soll- und die Istgeschwindigkeit des Zylinders. Wird die zulässige Geschwindigkeit um
mehr als 10 % überschritten, löst der PACHC eine Fehlerreaktion aus.
Werden mehrere gleiche Zylinder parallel an einer Achse betrieben, kann hier die Anzahl der Zylin-
Anzahl Zylinder der eigegeben werden. Der PACHC berechnet aus der Zylinderanzahl und den angegebenen Durch-
messer die Gesamtfläche, die zur Berechnung der Kraft verwendet wird. Der Standardwert ist „1”. Auflösung Die Auflösung gibt den Umrechnungsfaktor Längeneinheit pro Inkrement des Wegmesssystems an.
Wortlänge Die Wortlänge gibt die Telegrammlänge des Gebers in Bit an.
Baudrate [kbit/s] Die Baudrate legt die Übertragungsgeschwindigkeit der Daten zwischen Geber und PACHC fest.
Änderung des Richtungssinns
Richtungssinn Falls die Bewegungsrichtung des Wegmesssystems nicht dem vorgegebenen Richtungssinn ent-
spricht, kann er über den Parameter Richtungsumkehr invertiert werden. Der Wert „1“ bedeutet, die
Invertierung ist eingeschaltet.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
26 27Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.3.5.2 Encoder TTL / Encoder HTL / Encoder RS422 5.3.5.4 EtherCAT-Geber
Es besteht die Möglichkeit, die Istposition auch direkt über den EtherCAT-Bus vom EtherCAT-Master an den PACHC
zu übertragen.
HINWEIS
Bitte beachten Sie, dass durch die Übertragung der Istposition über den EtherCAT-Bus der Istwert verzögert wird. Diese Verzöge-
rung wirkt sich negativ auf die Gesamtdynamik der Regelachse und somit auf die Positions- und/oder Kraft-/Druckregelung aus.
Die Auflösung gibt den Umrechnungsfaktor Längeneinheit pro Inkrement des Wegmesssystems an.
Auflösung Bei Encoder TTL und HTL wertet der PACHC alle 4 Flanken der Messspuren aus und berechnet das
Sensorsignal intern mit einer viermal so hohen Auflösung.
Änderung des Richtungssinns
Richtungssinn Falls die Bewegungsrichtung des Wegmesssystems nicht dem vorgegebenen Richtungssinn ent-
spricht, kann er über den Parameter Richtungsumkehr invertiert werden. Der Wert „1“ bedeutet, die
Invertierung ist eingeschaltet.
5.3.5.3 Analoggeber Die Auflösung gibt den Umrechnungsfaktor Längeneinheit in mm pro Inkrement des Wegmesssystems an.
Auflösung Typischerweise wird die Istposition über den EtherCAT-Bus bereits in der Einheit mm übertragen, so-
dass in diesem Fall die Auflösung = 1 zu wählen ist.
Änderung des Richtungssinns
Richtungssinn Falls die Bewegungsrichtung des Wegmesssystems nicht dem vorgegebenen Richtungssinn ent-
spricht, kann er über den Parameter Richtungsumkehr invertiert werden. Der Wert „1“ bedeutet, die
Invertierung ist eingeschaltet.
Schnittstelle Analoge Schnittstelle, an die der Sensor angeschlossen ist.
Signaltyp des Ausgangssignals des Sensors.
Eingangssignaltyp
Es können Strom- und Spannungssensoren verwendet werden.
Position min. [mm] Minimale Position des Gebers
Position max. [mm] Maximale Position des Gebers
Signal min. [mA oder V] Minimales Ausgangsignal des Wegmesssystems
Signal max. [mA oder V] Maximales Ausgangsignal des Wegmesssystems
Änderung des Richtungssinns
Richtungssinn Falls die Bewegungsrichtung des Wegmesssystems nicht dem vorgegebenen Richtungssinn ent-
spricht, kann sie über den Parameter Richtungsumkehr invertiert werden. Der Wert „1“ bedeutet, die
Invertierung ist eingeschaltet.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
28 29Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.3.6 Drucksensoren 5.3.7 Kraftsensor
Drucksensoren können zur Druck- oder Kraftregelung verwendet werden. Werden Drucksensoren zur Kraftrege- Für eine verbesserte Regelgenauigkeit kann alternativ zu den Drucksensoren auch ein Kraftsensor für die Kraft-
lung eingesetzt, so wird über die Zylinderflächen A und B und die Drücke in den Zylinderkammern pA und pB die regelung eingesetzt werden. Ist ein Kraftsensor parametriert, so wird er zur Berechnung der Istkraft verwendet. In
resultierende Kraft berechnet. diesem Fall werden die Drücke der optionalen Drucksensoren nicht mehr zur Berechnung der Istkraft verwendet.
Es können bis zu 4 Drucksensoren pro Achse parametriert werden. Die logische Zuordnung der Sensoren ergibt Der Kraftistwert kann entweder über einen der 4 Analogeingänge oder über den EtherCAT-Bus eingelesen werden.
sich aus dem nachfolgenden Bild.
HINWEIS
Logische Anordnung der Drucksensoren
Bitte beachten Sie, dass durch die Übertragung des Kraft-Istwerts über den EtherCAT-Bus der Istwert verzögert wird. Diese Ver-
zögerung wirkt sich negativ auf die Gesamtdynamik der Regelachse und somit auf die Kraftregelung aus.
A B
P T
An den PACHC können insgesamt bis zu 4 analoge Drucksensoren für beide auf dem PACHC verfügbaren Regel-
achsen angeschlossen werden. Wahlweise kann der Druckistwert auch über den EtherCAT-Bus vom EtherCAT-
Master an den PACHC übertragen werden.
HINWEIS
Bitte beachten Sie, dass durch die Übertragung des Druckistwerts über den EtherCAT-Bus der Istwert verzögert wird. Diese Verzö-
gerung wirkt sich negativ auf die Gesamtdynamik der Regelachse und somit auf die Positions- und/oder Kraft-/Druckregelung aus.
Bei einem konstanten Druck an einem Anschluss kann auf einen Drucksensor verzichtet und stattdessen ein kon-
stanter Druckwert vorgegeben werden.
Schnittstelle Schnittstelle, an die der Sensor angeschlossen ist.
Typ des Ausgangssignals des Sensors
Signaltyp
Es können Strom- und Spannungssensoren verwendet werden.
Kraft min. [kN] Minimale Kraft des Sensors
Kraft max. [kN] Maximale Kraft des Sensors
Gebersignal min. [mA oder V] Minimales Ausgangsignal des Kraftsensors
Gebersignal max. [mA oder V] Maximales Ausgangsignal des Kraftsensors
Schnittstelle: Schnittstelle, an der der Sensor angeschlossen ist.
Signaltyp des Ausgangssignals des Sensors
Signaltyp
Es können Strom- und Spannungssensoren verwendet werden.
Druck min. [bar] Minimaler Druck
Druck max. [bar] Maximaler Druck
Gebersignal min. [mA oder V] Minimales Ausgangsignal des Drucksensors
Gebersignal max. [mA oder V] Maximales Ausgangsignal des Drucksensors
Ist kein Sensor angeschlossen, aber der Druck bekannt und konstant, kann er als konstanter Wert
Konstanter Druck
vorgegeben werden.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
30 31Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.3.8 Ventile 5.4 Optimierung
Zur Regelung einer hydraulischen Achse können an einem PACHC bis zu 4 Ventile betrieben werden. Innerhalb der Die Optimierung dient dazu, die Steuerungs- und Regelparameter einzustellen und so die Bewegung des Antriebs
Applikation sind verschiedenste Kombinationen möglich. So kann beispielsweise ein Antrieb mit unterschiedlichen zu optimieren. Über die Schaltfläche Optimierung wird die Anzeige umgeschaltet.
Ventilen für Kolben- und Stangenseite des Zylinders oder für Positions- und Kraft-/Druckregelung geregelt werden.
Die 4 Ventile lassen sich beliebig auf die beiden Achsen aufteilen. Nicht verwendete Ventilausgänge können als
Analogausgänge im IEC-Programm verwendet werden.
Über die linken Schaltflächen kann die zu optimierende Funktion gewählt werden und die jeweilige Parameterliste
erscheint. Über die Schaltfläche "Parameter senden" werden die Parameter an den PACHC übertragen. Sie wer-
den aber nicht auf automatisch auf dem Gerät gespeichert. Zum Speichern der Parameter verwenden Sie bitte die
Schaltfläche 'In Flash speichern'.
VORSICHT
Bauart des Ventils
Zur Auswahl stehen die folgenden Typen: Das Speichern der Parameter in den Flash kann die Regelung negativ beeinflussen, da die Abtastzeit des Reglers kurzzeitig über-
• 4/3-Wegeventil (+100 %=p->A) schritten werden kann. Es wird empfohlen, Werte nur zu speichern, wenn beide Achsen im Zustand "Power off" sind.
Ventiltyp • 4/3-Wegeventil (+100 %=p->B)
• 3/3-Wegeventil (+100 %=p->A)
• 2/2-Wegedrosselventil
• Druckventil 5.4.1 Reglerfunktionen
Typ des Ansteuersignals des Ventils Der PACHC verfügt über je einen Regler für Position- und Kraft bzw. Druck pro Achse. Die Bewegungsbefehle der
Es können Strom- und Spannungsventile mit folgenden Eingangssignalen verwendet werden: PACHC-Bibliothek schalten automatisch zwischen den beiden Reglern um. Die Stellgröße der Regler wird beim
-10..10 V
Sollsignal 0..10 V Umschalten abgeglichen, um einen Stellgrößensprung am Reglerausgang zu vermeiden. Die Abtastzeit der Regler
4..20 mA beträgt 250 µs. Das nachfolgende Bild gibt einen Überblick über die Gerätestruktur.
0..20 mA
EtherCAT
Mit dem Parameter wird ausgewählt, ob das Ventil vom Positionsregler oder mit dem Defaultwert an- Sollwert- Positions- Analog-
Aktiv in Positionsreglung generator regler Linearisierung
gesteuert wird. ausgang 0
EtherCAT
Achse 1 Achse 1
Mit dem Parameter wählen Sie aus, ob das Ventil vom Kraftregler oder mit dem Defaultwert ange-
Aktiv in Kraftreglung Regler-
steuert wird. umschaltung
Ansteuerwert des Ventils für den nicht konfigurierten Regler. Achse 1
Defaultwert [%] Kraft-/
Das Ventil wird mit diesem Wert angesteuert, wenn es für den aktiven Regler nicht konfiguriert wurde. Istwerte Linearisierung Analog-
Druckregler ausgang 1
Der Wert gibt an, wie der Anschluss in der Anwendung verwendet wird. Achse 1 1
Achse 1
Zur Auswahl stehen:
Zylinderanschluss A
Ventilanschluss A
Zylinderanschluss B
Sollwert- Positions-
Versorgungsdruck Linearisierung Analog-
Schnittstellen
generator regler
Tank 2 ausgang 2
Achse 2 Achse 2
Zur Auswahl stehen: Regler-
Zylinderanschluss A umschaltung
Ventilanschluss B Zylinderanschluss B Achse 2
Versorgungsdruck Kraft-/ Analog-
Istwerte Linearisierung
Tank Druckregler ausgang 3
Achse 2 3
Achse 2
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
32 33Elektrohydraulische Reglerbaugruppe Elektrohydraulische Reglerbaugruppe
Serie PACHC Inbetriebnahme Serie PACHC Inbetriebnahme
5.4.2 Positionsregler 5.4.2.2 Einstellwerte
5.4.2.1 Reglerstruktur
Der Positionsregler besteht im Kern aus einem Proportionalregler mit einem parallel geschalteten Integrierer. Um
die Regelabweichung weiter zu reduzieren, sind Vorsteuerungen für die Geschwindigkeit und Beschleunigung vor-
handen. Zusätzlich können die Geschwindigkeit und die Beschleunigung als Rückführung verwendet werden.
Bevor die Rückführungen für Geschwindigkeit und Beschleunigung verwendet werden können, müssen die Sig-
nalqualitäten überprüft und die Filterwerte sinnvoll angepasst werden. Bei unzureichender Signalqualität wird die
Regelung instabil.
In typischen Anwendungen werden zumeist nur die Geschwindigkeitsvorsteuerung, der Proportionalregler und der
Integrierer verwendet, wobei der Integrierer häufig nur zur Feinpositionierung bei kleinen Geschwindigkeiten und
geringen Schleppfehlern arbeiten soll. Ist der Betrag der Istgeschwindigkeit kleiner als die Geschwindigkeitsgrenze
für den I-Anteil und der Betrag des Schleppfehlers kleiner als das äußere Fenster und größer als das innere Fens-
ter, wird die Stellgröße des Integrierers verändert. Anderenfalls bleibt der Ausgang konstant.
Um den Wind-up-Effekt zu verhindern, kann die Stellgröße des Integrierers durch eine obere und untere Grenze
begrenzt werden.
Zusätzlich zu den oben beschriebenen Regleranteilen kann im Anwendungsprogramm ein zusätzlicher Stellgrößen-
anteil aufgeschaltet werden. Hierzu kann das Objekt 'PosCtrlDisturbanceOffset' verwendet werden. Es ist nicht im
Standardmapping des EtherCATs enthalten und muss noch von Hand hinzugefügt werden (àRxPd06).
Am Reglerausgang gibt es einen zusätzlichen Filter erster Ordnung, über den das Reglerausgangssignal zusätzlich
gefiltert werden kann, um eine hochfrequente Anregung der Regelstrecke zu vermeiden.
P-Anteil [%/mm] Proportionale Reglerverstärkung Kp
Beschleunigungs-
vorsteuerung I-Anteil [%/(s*mm)] Integrale Reglerverstärkung Ki
Soll- Inneres Schleppfehlerfenster für den I-Anteil
Beschleunigung
Inneres Fenster I Anteil [mm] Ist der Betrag des Schleppfehlers kleiner als dieser Wert, wird der Stellgrößenanteil des Integrierers
nicht mehr verändert.
Äußeres Schleppfehlerfenster für den Integrierer
Geschwind.- Äußeres Fenster I Anteil [mm] Ist der Betrag des Schleppfehlers größer als dieser Wert, wird der Stellgrößenanteil des Integrierers
vorsteuerung
Soll-
nicht mehr verändert.
Geschwindigkeit Negative Begrenzung des Stellgrößenanteils des Integrierers
I-Grenze negativ [%]
Die Stellgröße wird nach unten auf diesen Wert begrenzt.
Positive Begrenzung des Stellgrößenanteils des Integrierers
I-Grenze positiv [%]
Geschwind.- Fenster I-Anteil Begrenzung Die Stellgröße wird nach oben auf diesen Wert begrenzt.
grenze
Geschwindigkeitsgrenze des Integrierers
Geschw.-Grenze [mm/s] Ist der Betrag der Istgeschwindigkeit größer als dieser Wert, wird der Stellgrößenanteil des Integrie-
IEC- rers nicht mehr verändert.
Stellgröße
Geschwindigkeitsvorsteuerung
Geschw.-Vorst. [%/(mm/s)] Mit diesem Faktor wird die Sollgeschwindigkeit multipliziert und zu der Gesamtstellgröße des Reg-
P-Anteil
+ + + + Filter lers addiert.
Soll- Beschleunigungsvorsteuerung
Position + - + + + +
- - Beschl.-Vorst. [%/(mm/s²)] Mit diesem Faktor wird die Sollbeschleunigung multipliziert und zu der Gesamtstellgröße des Reg-
lers addiert.
Geschwindigkeitsrückführung
Differenzierer Filter
Geschwind.-
rückführung
Geschw.- Rück. [%/(mm/s)] Mit diesem Faktor wird die Istgeschwindigkeit multipliziert und von der Gesamtstellgröße des Reg-
Ist-
lers subtrahiert.
Position Beschleunigungsrückführung
Beschl.- Rück. [%/(mm/s²)] Mit diesem Faktor wird die Istbeschleunigung multipliziert und von der Gesamtstellgröße des Reg-
lers subtrahiert.
Beschleunigungs- Filter Geschw. [µs] Filterzeitkonstante des PT1-Filters des Geschwindigkeitswerts.
Differenzierer Filter rückführung
Filter Ctrl.-Signal [µs] Filterzeitkonstante des PT1-Filters am Reglerausgang.
PACHC 5715-720DE.indd 09.06.20 PACHC 5715-720DE.indd 09.06.20
34 35Sie können auch lesen