Heuristic search planning - Stefan Ender / Matthias Raps Hauptseminar "Problemlösen und Planen"
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Heuristic search planning
Hauptseminar
„Problemlösen und Planen“
Stefan Ender / Matthias Raps
1Agenda
Einleitung mit Definitionen
STRIPS und Zustandsraummodell
Eingesetzte Heuristiken
HSP 2.0 (Heuristic search planner)
Bewertung und Ausblick
2Was ist eine Heuristik? [1]
eine allgemeine Definition:
{ abgeleitet aus dem Altgriechischen
{ zu deutsch „ich finde“
{ Als Heuristik bezeichnet man eine Strategie,
{ die das Streben nach Erkenntnis
{ und das Finden von Wegen zum Ziel
{ planvoll gestaltet.
(aus www.wikipedia.org)
3Was ist eine Heuristik? [2]
d.h. eine „Heuristik" ist
{ eine Daumenregel,
{ eine Strategie,
{ ein Trick,
{ eine Vereinfachung oder
{ ein anderes Hilfsmittel,
{ das die Problemlösungssuche in großen Problemräumen
drastisch begrenzt.
garantiert keine optimale Lösung
{ eigentlich garantiert sie nicht einmal irgendeine Lösung
4Was ist eine Heuristik? [3]
aus Sicht der Informatik:
{ Lehre zur methodischen Gewinnung neuer Erkenntnisse,
mit Hilfe der Erfahrung
{ beruht meist auf Faustregeln bzw. Algorithmen
{ liefern häufig keine optimalen
{ aber meist gute Lösungen
{ Einsatzgebiet: Aufwand zu groß für die Berechnung der
optimalen Lösung
5Beispiel für eine Heuristik:
„nächster Nachbar“
wird häufig im täglichen Leben angewandt
Ausgangspunkt: Reisender muss verschiedene Kunden
besuchen
{ sucht zuerst nächsten Nachbarn seines aktuellen Standortes
{ bewegt sich zu diesem und
{ wendet die Heuristik erneut an
{ wenn er alle Kunden besucht hat, fährt er nach Hause zurück.
Nachteil: oftmals schlechte Resultate, da
{ Heimweg und
{ andere unterwegs vergessene Punkte
hohe Kosten verursachen.
6Planungsproblem in STRIPS [1]
Planungsproblem wird in STRIPS dargestellt als Tupel P =
(A,O,I,G) mit
{ A: Menge von Atomen
{ O: Menge von Operatoren mit Prec(op), Add(op), Del(op)
{ I: Initialzustand
{ G: Zielzustände
Ein STRIPS Problem definiert dabei einen Zustandsraum
bestehend aus:
{ Menge von Zuständen
{ Startzustand
{ Zielzustände
{ Menge von möglichen Aktionen (Operatoren)
{ Zustandsübergangsfunktion ( s´= s \ Del (a ) ∪ Add (a ))
{ Kosten der Aktionen (sind für jeden Übergang 1!)
7Planungsproblem in STRIPS [2]
heuristic search planning kann jetzt als
Suche im Zustandsraum angesehen werden
d.h. Überführung des Startzustands in
Zielzustand durch eine Folge von Aktionen
HSP nutzt Beschreibungen in PDDL
{ Planning Domain Definition Language
{ Erweiterung von STRIPS
{ Standard für Darstellung von Plannungsproblemen
8Domänendefinition für die
Blockswelt in PDDL
; Block World Domain definition
Definition der
(define (domain blocks_world)
(:requirements :strips) möglichen Prädikate
(:predicates (on-table ?x) (on ?x ?y) (clear ?x))
(:action MoveToTable
:parameters (?x ?y) Block x wird von Block y auf
:precondition (and (clear ?x) (on ?x ?y))
den Tisch gelegt
:effect (and (clear ?y) (on-table ?x)
(not (on ?x ?y))))
(:action MoveToBlock1
:parameters (?x ?y ?z)
:precondition (and (clear ?x) (clear ?z) (on ?x ?y)) Block x wird von Block y
:effect (and (clear ?y) (on ?x ?z) auf Block z gelegt
(not (clear ?z)) (not (on ?x ?y))))
(:action MoveToBlock2
:parameters (?x ?y)
:precondition (and (clear ?x) (clear ?y) (on-table ?x))
:effect (and (on ?x ?y) Block x wird vom Tisch
(not (clear ?y)) (not (on-table ?x))))) auf Block y gelegt
9Problemdefinition in PDDL -
Ein Beispiel für die Blockswelt
(define (problem hs1) Zugehörige
(:domain blocks_world)
(:objects A B C D E F)
Domänendefinition
(:init
(on-table A) (on D A) (clear D)
(on-table F) (on B F) (on C B) (clear C) C
(on-table E) (clear E)) D B
A F E
(:goal
Startzustand
(and (on B C) (on-table C) (on A F)
(on-table F) (on-table D) (on E D) (clear B)
(clear A) (clear E))))
B A E
C F D
Endzustand
10Suche im Zustandsraum
Einsatz von Heuristiken um diese effizient
zu gestalten
Heuristik soll dabei automatisch aus der
Problemrepräsentation gewonnen werden
=> Domänenunabhängigkeit
11Gewinnung der Heuristik [1]
Heuristische Funktion h(s)
{ Betrachtung eines vereinfachten Problems
(relaxed problem P´), in dem
{ delete lists ignoriert werden
{ Kosten h´(s) sind untere Schranke für h*(s)
(Kosten des Problems P)
{ => h´(s) zulässige (admissible) Heuristik
12Gewinnung der Heuristik [2]
Aber: auch Lösung von P´ und damit
Gewinnung der Funktion h´ ist NP-hard
=> Annäherung an h´(s):
{ Kosten für die Gewinnung der einzelnen
Zielatome (Teilziele) aus Zustand s werden
geschätzt
{ h(s) ist dann eine geeignete Kombination aus
diesen einzelnen Schätzungen
13Die additive Heuristik
„Summe der Kosten um alle Teilziele zu erreichen“
hadd ( s ) = ∑ g S (r )
r∈C
Beispiel:
gS (Teilziel 1) = 3, gS(Teilziel 2) = 5, gS(Teilziel 3) = 2
=> hadd = 3 + 5 + 2 = 10
nicht admissible,
{ da Teilziele nicht unabhängig voneinander sind
{ d.h. es kann auch zu Überschätzungen kommen
14Die Max – Heuristik
„die höchsten Kosten um ein Teilziel zu erreichen“
hmax ( s ) = max g S (r )
r∈C
Beispiel:
gS (Teilziel 1) = 3, gS(Teilziel 2) = 5, gS(Teilziel 3) = 2
=> hmax = 5
ist admissible,
{ d.h. keine Überschätzung möglich
15Berechnung der Kosten für die
Erreichung der Teilziele
Version des Bellman–Ford Algorithmus (findet den
kürzesten Weg in einem Graphen)
falls Teilziel im Zustand s vorhanden ist, so werden die
Kosten hierfür auf gS(p)= 0, andernfalls auf ∞ gesetzt
Ausführung aller anwendbaren Operatoren
Hinzufügen der Atome aus den zugehörigen Add-Listen
zum Zustand s.
gS(p) verändern auf: g S ( p ) := min[ g S ( p),1 + g S (Prec(op ))]
Vorgang wiederholen bis sich gS(p) nicht mehr verändert
16Berechung der Kosten für die
Erreichung der Teilziele - Beispiel
Bewertung der bereits erfüllten Teilziele mit 0:
C gs(on-table(F)) = 0; gs(clear (E)) = 0
D B Ausführung aller möglichen Operatoren
A F E
Startzustand z.B. MoveToTable (D A), MoveToBlock2 (E D)
S = ((on-table A) (on-table E)
usw.
(on-table F) (on D A) (on B F) Atome der Add-Listen zu S hinzufügen
(on C B) (clear C) (clear D)
(clear E)) z.B. on-table (D), clear(A), on(E D) usw.
Jetzt erreichte Teilziele werden mit Kosten 1
B A E bewertet
C F D
z.B. gs(on-table(D)) = 1; gs(clear(A)) = 1;
Endzustand
G = ((on-table C) (on-table D)
gs(on(E D)) = 1 usw.
(on-table F) (on B C) (on E D) Wieder alle möglichen Operatoren ausführen
(on A F) (clear A) (clear B)
(clear E)) usw.
17HSP 2.0
(Heuristic search planner)
domänenunabhängig (general problem
solver)
automatische Gewinnung der Heuristik aus
der Problemdefinition
verschiedene Funktionalitäten des HSP 2.0
{ Vorwärts- bzw. Rückwärtsplanung
{ Verschiedene Heuristiken (add, max, h2)
implementiert in C
18HSP 2.0 [1]
Best-First-Search Planner (entspricht einer
Breitensuche)
Suchalgorithmus in HSP 2.0
{ nutzt WA* - Algorithmus (Abwandlung von A*)
{ A*: Entscheidung anhand Evaluierungsfunktion
welcher Knoten als nächstes generiert wird
f(n) = g(n) + h (n)
g(n): tatsächliche Kosten bis Knoten n
h(n): geschätzte Kosten bis zum Ziel
19HSP 2.0 [2]
WA*: f(n) = g(n) + W*h(n)
W: Parameter zur Gewichtung der Heuristik
Für W = 1 entspricht WA* dem A* -
Algorithmus
Für W > 1: Lösungen werden schneller
gefunden, aber wahrscheinlich sind diese
weiter entfernt von der optimalen Lösung,
d.h. mehr Schritte vom Startzustand in den
Zielzustand
20Berechnung der
Evaluierungsfunktion - Beispiel
C
D B
A F E
Startzustand
Kosten sind bekannt
=> hier z.B. g(n) = 2
Evaluierungsfunktion
B
A F E C D f(n) = g(n) + W * h(n)
aktueller Zustand => hier z.B f(n) = 2 + 2 * 3 = 10
mit W = 2
Kosten werden vom
Planer geschätzt
=> hier z.B. hAdd(n) = 4
A B E
F C D
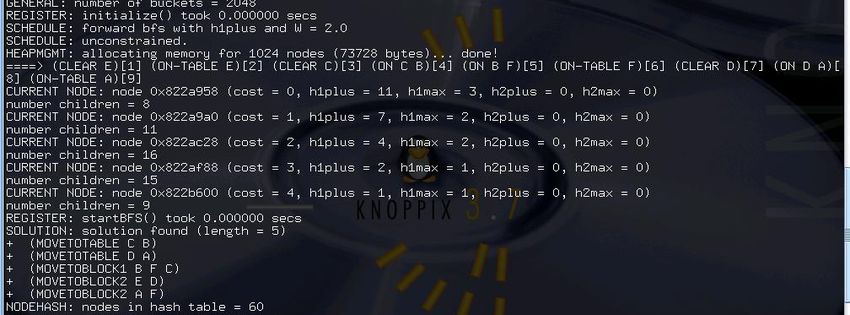
21
EndzustandHSP 2.0 in Aktion
cost = g(n)
Default-Modus: Vorwärtssuche mit h1plus = hadd(n)
der additiven Heuristik und W=2
h1max = hmax(n)
22HSP 2.0 – Die Lösung
unseres Beispiels Schritt 1
Schritt 2
Schritt 3
C
D B Schritt 4
A F E
Startzustand Endzustand
D B B
A F E C A F E C D
Schritt 1 Schritt 2
B E B
A F C D A F E C D
Schritt 4 Schritt 3
A B E
F C D
23
EndzustandBewertung von HSP 2.0
komplett,
{ d.h. es wird eine Lösung gefunden, wenn
eine existiert
nicht optimal,
{ da hadd nicht admissible ist
Nachteil vom Vorwärtsplanen: Heuristik
muss in jedem Zustand neu berechnet
werden
24Ergebnisse der AIPS-00 Planning
Competition für die Blockswelt
BlackBox
Mips
1000
System R
FF
HSP2
10 IPP
Seconds
PropPlan
TokenPlan
12
14
16
18
22
24
32
34
36
83
40
42
44
50
10
20
26
28
30
46
48
5
6
8
9
4
STAN
0.1
BDDPlan
AltAlt
GRT 25
0.001Ausblick: FF Planer
FF = Fast Forward
entwickelt an der Universität Freiburg (Hoffmann,
Nebel)
Vorwärtsplaner
Erweitert Heuristik des HSP
{ Informationen aus der Extraktionsphase des Graphplan –
Algorithmus
Suchstrategie: Kombination aus
{ Hill-Climbing und
{ systematischer Suche
Top Performer in der AIPS–Competition ´02
26Sie können auch lesen