C Koppelbares Elektro-Stadtauto - Belegarbeit WS 2013/14 - Lena Busse Stephan Rakitin
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Koppelbares Elektro-Stadtauto
Belegarbeit WS 2013/14
Fach: Fahrzeugkonzepte
c³
the connectable city car
Lena Busse
Stephan Rakitin
Markus Schneider
Marvin Kemnitz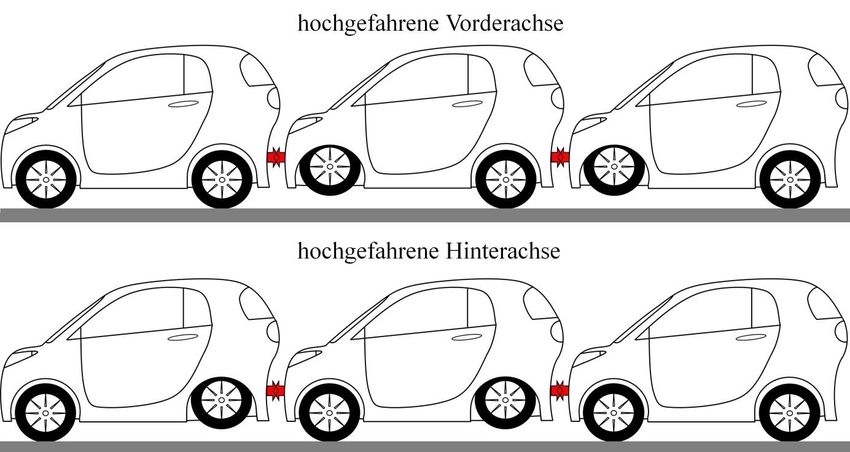
Koppelbares Elektro-Stadtauto
Belegarbeit WS 2013/14
Erstellt durch: Lena Busse
Stephan Rakitin
Markus Schneider
Marvin Kemnitz
Dozent: Prof. Dr.–Ing. Werner Stedtnitz
Abgabe: 25.02.2014
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Inhalt
Abbildungsverzeichnis ........................................................................................... III
Tabellenverzeichnis ................................................................................................ V
Abkürzungsverzeichnis........................................................................................... V
1 Einleitung .......................................................................................................... 1
2 Stand der Technik ............................................................................................. 2
2.1 Zulassungs- und Nutzungsverhalten von Kraftfahrzeugen in Deutschland .. 2
2.2 Micro-Wagen Konzepte .............................................................................. 3
2.3 Patentrecherche über koppelbare Fahrzeugkonzepte ................................ 6
3 Anforderungen .................................................................................................. 9
3.1 Anforderungen an ein Stadtauto ................................................................. 9
3.2 Anforderungen an das Konzept ................................................................ 10
3.3 Anforderungen an den Innenraum ............................................................ 13
4 Konzeption ...................................................................................................... 14
4.1 Antrieb des Fahrzeugs .............................................................................. 14
4.1.1 Grundlagen Elektromotoren ...................................................................... 14
4.1.2 Vergleich der Elektroantriebe.................................................................... 22
4.2 Traktionsbatterie ....................................................................................... 23
4.3 Kopplung.................................................................................................... 26
4.3.1 Grundlagen der Kopplung .......................................................................... 29
4.3.2 Vergleich der Kupplungssysteme .............................................................. 33
4.4 Achsen ...................................................................................................... 35
4.4.1 Vorderachse ............................................................................................. 36
4.4.2 Hinterachse............................................................................................... 38
4.4.3 Lenkung .................................................................................................... 40
II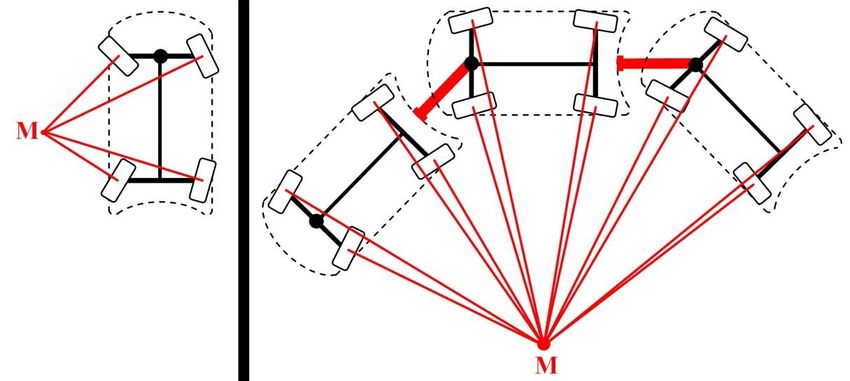
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
4.4.4 Vergleich der Achsen und Lenkung .......................................................... 42
5 Entwurf ............................................................................................................ 46
5.1 Gesamtkonfiguration ................................................................................. 46
5.2 Datenübertragung ..................................................................................... 48
6 Zusammenfassung .......................................................................................... 57
7 Ausblick ........................................................................................................... 58
8 Literaturverzeichnis ......................................................................................... 59
Abbildungsverzeichnis
Abbildung 2-1: Renault Twizzy ................................................................................... 4
Abbildung 2-2: DFKI EO1 ........................................................................................... 4
Abbildung 2-3: DFKI EO1 mit Zusatzmodul ................................................................ 4
Abbildung 2-4: Fahrzeugkonzept Hiriko ...................................................................... 5
Abbildung 2-5: Grundidee Platooning ......................................................................... 6
Abbildung 2-6: Motor-Einrad Ryno ............................................................................. 7
Abbildung 2-7: Verbindung der Einräder nebeneinander und hintereinander ............. 8
Abbildung 3-1: Nutzung der einzelnen Module ......................................................... 12
Abbildung 4-1: Kennlinienvergleich Verbrennungs- und Elektromotor ...................... 15
Abbildung 4-2: Energiefluss im Elektrofahrzeug ....................................................... 16
Abbildung 4-3: Antriebsstrang- Konfigurationen ....................................................... 16
Abbildung 4-4: Zentraler Elektromotor im Peugeot iON ............................................ 17
Abbildung 4-5: Tandemantrieb an einer Mehrlenkerhinterachse .............................. 18
Abbildung 4-6: Radnabenmotor als Innen- und Außenläufer .................................... 19
Abbildung 4-7: Michelin Active Wheel ...................................................................... 21
Abbildung 4-8: Siemens eCorner.............................................................................. 21
Abbildung 4-9: Anforderungen an die Traktionsbatterie ........................................... 24
III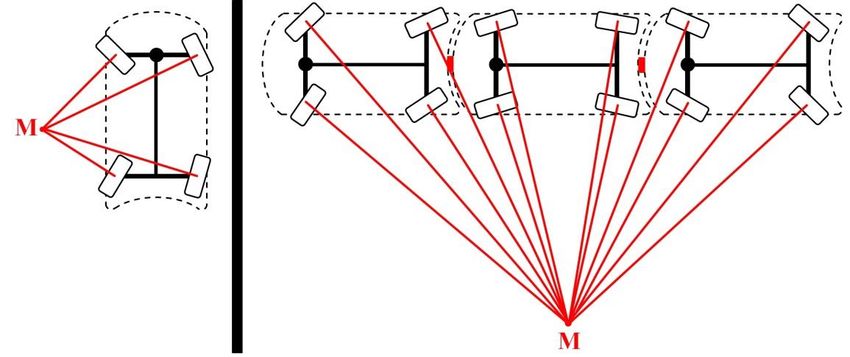
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Abbildung 4-10: Ragone-Diagramm ......................................................................... 26
Abbildung 4-11: Kopplungsvarianten am Bsp. einer beweglichen Kopplung ............ 27
Abbildung 4-12: Kugelkopfanhängerkupplung .......................................................... 29
Abbildung 4-13: Maulkupplung von Rockinger ......................................................... 30
Abbildung 4-14: Scharfenberg-Kupplung .................................................................. 30
Abbildung 4-15: Sattelzugkupplung .......................................................................... 31
Abbildung 4-16: Zuggabel......................................................................................... 32
Abbildung 4-17: Schleppdeichsel montiert und einzeln ............................................ 32
Abbildung 4-18: Geliftete Vorder- bzw. Hinterachse im Koppelbetrieb ..................... 35
Abbildung 4-19: Anteile der Vorderachstypen weltweit ............................................. 36
Abbildung 4-20: McPherson-Vorderachse (VW Golf 5) ............................................ 36
Abbildung 4-21: Doppelquerlenker-Vorderachse (BMW 5er Limousine) .................. 37
Abbildung 4-22: Anteile der Hinterachstypen weltweit .............................................. 38
Abbildung 4-23: Anteile Hinterachstypen bezogen auf Antriebsart ........................... 38
Abbildung 4-24: Verbundlenker-Hinterachse mit Wattgestänge, Opel Astra ............ 39
Abbildung 4-25: Mehrlenker-Hinterachse, Porsche Panamera ................................. 39
Abbildung 4-26: Entwicklung der Lenkung................................................................ 40
Abbildung 4-27: Skizzenhafte Darstellung der Achsschenkellenkung ...................... 41
Abbildung 4-28: starre Kopplung und Vorderradlenkung .......................................... 43
Abbildung 4-29: starre Kopplung und Allradlenkung................................................. 43
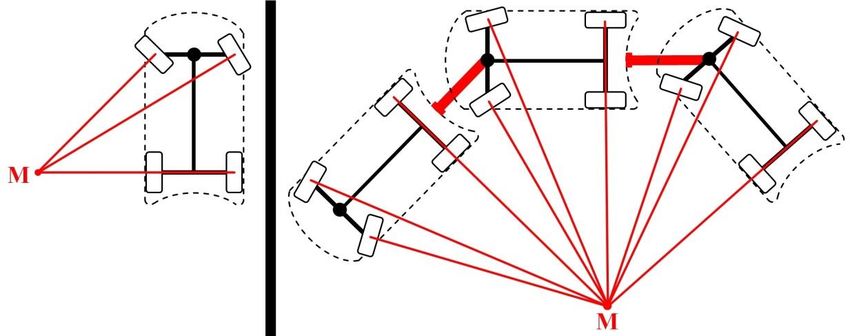
Abbildung 4-30: bewegliche Kopplung und Vorderradlenkung ................................. 44
Abbildung 4-31: bewegliche Kopplung und Allradlenkung ........................................ 44
IV
Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte Tabellenverzeichnis Tabelle 1: Bewertungsmatrix Antriebskonfiguration .................................................. 22 Tabelle 2: Vergleich von beweglicher und starrer Kopplung der Fahrzeuge............. 28 Tabelle 3: Bewertungsmatrix Kupplungssysteme ..................................................... 34 Tabelle 3: Bewertungsmatrix der Lenkvarianten ....................................................... 45 Abkürzungsverzeichnis ABS - Antiblockiersystem c³ - connectable city car CO2 - Kohlenstoffdioxid da - Ackermannwinkel außen di - Ackermannwinkel innen DFKI - Deutsches Forschungszentrum für künstliche Intelligenz ESC / P - Electronic Stability Control / Elektronisches Stabilitätsprogramm Fa. - Firma IAV - Ingenieurgesellschaft Auto und Verkehr kg - Kilogramm km/h - Kilometer pro Stunde kW - Kilowatt m - Meter M - Momentanpol / Drehpunkt MIT - Massachusetts Institute of Technology Nm - Newtonmeter Wh - Wattstunden V
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
1 Einleitung
Aufgrund des Klimawandels und der Erkenntnis über das nahende Ende der Erdölre-
serven ist die globale Automobilindustrie zu einem gesellschaftlichen und politischen
Umdenkprozess gezwungen.
Bis zum Jahr 2020 sollen in der Bundesrepublik Deutschland mindestens eine Million
Elektroautos auf den Straßen fahren, so das Ziel der Bundesregierung unter Bun-
deskanzlerin Angela Merkel: "Elektromobilität erfordert eine umfassende Zusam-
menarbeit, sowohl branchen- als auch grenzüberschreitend, um die Mobilität mög-
lichst weltweit klimafreundlicher gestalten zu können“ [1]
In der Bundesrepublik Deutschland wurden im Jahr 2013 mit 6051 verkauften Elekt-
rofahrzeugen doppelt so viele Elektroautos neu zugelassen als im Vorjahr. [2]
Neben dem Ziel der Bundesregierung, die Mobilität klimafreundlicher zu gestalten, ist
es notwendig geeignete Lösungen für verstopfte Autobahnen und Innenstädte zu
finden. Die Benutzung öffentlicher Verkehrsmittel, wie Busse und Bahnen, leistet da-
zu einen entscheidenden Beitrag. Jedoch wird durch deren Benutzung nicht die ge-
wünschte mobile Unabhängigkeit erreicht. Die Orte des alltäglichen Lebens sind mit
diesen Verkehrsmitteln oftmals nicht oder nur sehr schwer zu erreichen.
Um das Ziel einer klimafreundlichen, unabhängigen und stressfreien Mobilität zu er-
reichen sind neue Fahrzeug- und Mobilitätskonzepte erforderlich. Eine Unterstützung
dazu liefern Mitfahrgelegenheiten. Ein Fahrer bietet seine geplante Fahrt im Voraus
in einschlägigen Portalen an. Interessierte Personen finden auf den Portalen die in-
serierte Fahrt und können eine Anfrage für eine Mitfahrt stellen. Somit werden die
Straßen entlastet und die Umwelt geschützt. Jedoch wird auch damit keine mobile
Unabhängigkeit des Individuums erreicht. Der Mitfahrer ist auf die Zeiten und die
Strecke des jeweiligen Fahrers angewiesen.
Im Rahmen dieser Arbeit soll ein Fahrzeug- und Mobilitätskonzept vorgestellt wer-
den, welches die Kopplung von mehreren Elektrofahrzeugen vorsieht. Das Fahrzeug
soll insbesondere auf die Verwendung in der Stadt abgestimmt werden und variabel
nutzbar sein. Sowohl für Familien als auch für Alleinstehende soll das Fahrzeug op-
timal für den Alltag genutzt werden können. Dazu gehört neben dem Transport von
Personen auch die Möglichkeit kleine Gegenstände zu transportieren.
1
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Je nach Bedarf des Fahrers kann ein Fahrzeug mit weiteren gleichen Fahrzeugen
gekoppelt werden, um den Einsatzbereich zu verändern. Durch die Kopplung der
Fahrzeuge kann ebenfalls der Luftwiderstand gegenüber einzeln fahrenden Fahr-
zeugen verringert werden. Für die Anpassung an die speziellen Anforderungen an
ein Stadtauto werden diese zunächst vorgestellt. Daraufhin werden die verschiede-
nen Parameter des Fahrzeugkonzepts einzeln erläutert und verschiedene Lösungs-
ansätze ausgearbeitet. Abschließend werden die verschiedenen Komponenten des
Fahrzeugs aufeinander abgestimmt und ein Entwurf des Fahrzeugs vorgestellt.
2 Stand der Technik
Im folgenden Abschnitt werden zunächst aktuelle Fahrzeuge und Studien sowie Pa-
tente untersucht und vorgestellt, um einen Überblick über aktuelle Entwicklungen zu
schaffen.
2.1 Zulassungs- und Nutzungsverhalten von Kraftfahrzeugen
in Deutschland
Im statistischen Vergleich weist derzeit die Fahrzeugklasse der Klein- und Kleinstwa-
gen das größte Wachstumssegment auf. Studien zufolge werden Fahrzeuge der Mit-
telklasse und größere Fahrzeuge stetig an Bedeutung verlieren. Klein- und Kleinst-
wagen, zu denen klassische Vertreter wie der Smart, Volkswagen up!, Toyota iQ
oder der Opel Adam gehören, weisen einen Anteil von ca. 21 % der Neuzulassungen
auf. Seit dem Jahr 2005 ist hier ein steigender Anteil zu verzeichnen. [3]
Die Vorteile von Klein- sowie Kleinstwagen werden schnell ersichtlich. In der Regel
liegen die Anschaffungs- und Unterhaltskosten deutlich unter dem Niveau größerer
Fahrzeuge. Durch das geringere Gewicht und die kleinere mittlere Querschnittsfläche
der Fahrzeuge sind zum einen verbrauchsärmere Fahrten möglich. Zum anderen
erleichtert sich bei der Benutzung im innerstädtischen Bereich die Parkplatzsuche.
2
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Kraftfahrzeugnutzer in Industrieländern legen mit ihren Fahrzeugen vor allem kurze
Strecken zurück. Davon fallen sehr viele Kilometer auf den innerstädtischen Bereich.
Laut einer Umfrage von „TNS Infratest“ in Zusammenarbeit mit der Fa. Continental
zum Thema Hybridfahrzeuge liegen knapp 70 % aller gefahrenen Kilometer von
Kunden mit einer Jahresfahrleistung unter 30.000 km im innerstädtischen Kurzstre-
ckenbereich bei bis zu 50 km. [4]
Diese Statistiken unterstützen die Tatsache, dass für sehr viele Kraftfahrzeugnutzer
der Elektroantrieb eine geeignete und umweltfreundliche Alternative zum konventio-
nellen Verbrennungsmotor darstellt. Der Elektroantrieb befindet sich bereits in vielen
Klein- und Kleinstwagen im Serieneinsatz. So bieten Automobilhersteller wie z.B.
Volkswagen oder Smart die oben genannten Fahrzeuge mit Elektroantrieb an. Um
möglichen Käufern dieser Elektrofahrzeuge den Unmut über Unzulänglichkeiten bei
der Benutzung eines Elektrofahrzeugs zu nehmen, bieten die Hersteller derzeit ver-
schiedene Aktionen an. Volkswagen stellt z.B. Käufern des VW e-up! in den ersten
drei Jahren für 30 Tage kostenlos ein Leihfahrzeug für weite Strecken oder den
Transport sperriger Gegenstände zur Verfügung.
2.2 Micro-Wagen Konzepte
Vor allem in den letzten Jahren ist eine fortschreitende Entwicklung elektrischer
Stadtautokonzepte im unteren Kleinstwagen- bzw. im Micro-Wagen-Segment wahr-
nehmbar. Neben Serienfahrzeugen wie dem Renault Twizzy existieren zahlreiche
Prototypen.
Bei dem im Januar 2011 durch den französischen Automobilhersteller Renault vor-
gestellten Twizzy handelt es sich um ein vierrädriges vollelektrisches Fahrzeug. Das
in Abbildung 2-1 dargestellte, in der Regel zweisitzige Fahrzeug weist ein Gewicht
von 398 kg und eine Höchstgeschwindigkeit von 80 km/h auf. Ebenfalls ist eine ein-
sitzige Variante des Twizzy mit Hecktür und Kofferraum erhältlich.
3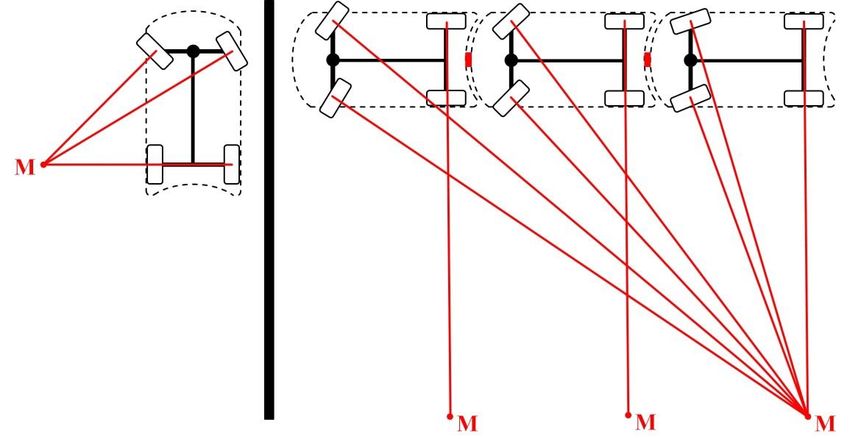
Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte Abbildung 2-1: Renault Twizzy [5] Neben dem Renault Twizzy existieren zahlreiche Prototypen im Micro-Wagen Seg- ment. Diese Fahrzeugklasse ist unterhalb der Kleinstwagen angeordnet. Auf der Computermesse Cebit im Jahr 2012 wurde das koppelbare Elektroauto EO1 Smart Connecting Car vom Deutschen Forschungszentrum für künstliche Intelligenz (DFKI) ausgestellt (Abbildung 2-2). Der 2,5 m lange Prototyp EO1 verfügt über vier Räder mit Einzelradaufhängung sowie Einzelradlenkung. Zwei der Räder werden durch Radnabenmotoren angetrieben. Durch eine einklappbare Hinterachse kann der Radstand des Fahrzeugs verkürzt werden. So soll die Parklatzsuche in der In- nenstadt deutlich erleichtert werden. Abbildung 2-2: DFKI EO1 [6] Abbildung 2-3: DFKI EO1 mit Zusatzmodul [7] Außerdem greift das Forschungszentrum die Idee der Kopplung auf. Das Fahrzeug kann mit weiteren Fahrzeugen bzw. mit einem Anhänger für zusätzliche Passagiere gekoppelt werden (Abbildung 2-3). 4
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Ein ähnlicher Prototyp mit dem Namen „Hiriko“ wurde durch das Massachusetts Insti-
tute of Technology (MIT) vorgestellt. Der Fahrzeugaufbau des Hirikos ähnelt dem
des EO1. Durch die Regentropfenform des Fahrzeugs wird zudem ein möglichst ge-
ringer Luftwiderstand erreicht. Die Steuerung des Hirikos erfolgt ausschließlich mit
dem Lenkrad, wodurch das Fahrzeug weder Gas- noch Bremspedal besitzt. Durch
den eingebauten Faltmechanismus ist eine Verkürzung des Radstands gemäß
Abbildung 2-4 ebenfalls möglich.
Abbildung 2-4: Fahrzeugkonzept Hiriko [8]
Micro-Fahrzeuge schöpfen einige Vorteile der Kleinstwagen weiter aus. Hierzu zäh-
len z.B. der geringe Kraftstoff- bzw. Akkuverbrauch und die erleichterte Parkplatzsu-
che. Problematisch gestaltet sich sowohl das Sicherheitsempfinden als auch die sehr
eingeschränkte Möglichkeit des Warentransportes. Eine Knautschzone mit Fußgän-
gerschutz, Kompatibilitäts- und Eigenschutzzone ist bei den vorgestellten Fahrzeu-
gen nicht zu erkennen. Zudem wird die gesamte Steifigkeit der Konstruktion durch
die einklappbare Hinterachse geschwächt. Eine allgemeine Akzeptanz der Fahrzeu-
ge wird unter diesen Umständen durch eine breite Käuferschicht nicht zu erwarten
sein.
5Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte 2.3 Patentrecherche über koppelbare Fahrzeugkonzepte Im Folgenden sollen verschiedene Patente vorgestellt werden, welche sich mit der Kopplung von mehreren Fahrzeugen beschäftigen. Elektronische Kopplung ohne Mechanik - Platooning Patentnummer: DE 102010028637 A1 Veröffentlichungsdatum: 10. November 2011 Antragsteller: BMW AG Das oben genannte Patent der BMW AG basiert auf dem sogenannten Platooning. Der Begriff "platoon" bezeichnet im Englischen einen militärischen Zug. Dabei wer- den mehrere Fahrzeuge ohne eine feste Verbindung miteinander in einem engen Abstand gekoppelt. Die Kopplung erfolgt lediglich in elektronischer Form und soll den Luftwiderstand der einzelnen Fahrzeuge vermindern. Das Fahrzeug an der Spitze bestimmt dabei die Fahrtroute sowie die Geschwindigkeit. Durch intelligente elektro- nische Systeme wie automatische Abstandshaltung sowie autonome Lenkung kön- nen sich die Fahrer, wie in Abbildung 2-5 sichtbar, während der Fahrt mit anderen Aufgaben beschäftigen. Somit wird zum einen Kraftstoff eingespart und zum anderen werden Staus verhindert. Möchte ein Fahrer wieder die manuelle Fahrzeugführung übernehmen, kann er den Zug problemlos verlassen. Abbildung 2-5: Grundidee Platooning [9] 6
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Durch die Kolonnenfahrt kann der Luftwiderstand der geführten Fahrzeuge um bis zu
30 % reduziert werden. Der Abstand zwischen den Fahrzeugen wird in einem Be-
reich zwischen 3 und 15 m festgelegt. Je geringer der Abstand zwischen den Fahr-
zeugen ausfällt, desto höher ist die Reduzierung des Luftwiderstands. [10]
In einem ähnlichen von der EU finanzierten Projekt namens SATRE wurden bereits
erfolgreiche Tests auf dem Volvo Testgelände in Göteborg durchgeführt. Besonders
LKW eignen sich als Zugfahrzeuge. Dies ist zum einen auf die geschulten und ärzt-
lich untersuchten Fahrer zurückzuführen und zum anderen auf die große Quer-
schnittsfläche der LKW. Somit kann ein größerer Windschattenbereich erzeugt wer-
den. [11]
Modulares Elektromotor Einrad
Patentnummer: DE 102011056561 A1
Veröffentlichungsdatum: 20. Juni 2013
Antragsteller: TU Chemnitz
Das Patent des modularen Einrads mit Elektromotor baut auf dem Motor-Einrad „Ry-
no“ auf. Das in Abbildung 2-6 dar-
gestellte Einrad ist eine Erfindung
des Hamburgers Chris Hoffmann.
Gesteuert wird das 57 kg schwere
Einrad durch Gyro-Sensoren. Durch
das Vor-, Zurück- oder Seitwärtsleh-
nen wird das Mobil ähnlich einem
Segway gesteuert. Die Fahrtstabili-
sierung wird ebenfalls durch die intel-
ligente Sensorik sichergestellt. [12]
Abbildung 2-6: Motor-Einrad Ryno [12]
7Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte Sowohl die Mitnahme von Gepäck als auch die Mitnahme weiterer Personen gestal- tet sich auf dem Einrad sehr schwierig bis unmöglich. Aus diesem Grund sieht das Patent der Technischen Universität Chemnitz die Verbindung mehrerer Motor- Einräder durch eine mechanische Verbindung gemäß Abbildung 2-7 vor. Die Einräder können nach dem Patent sowohl nebeneinander als auch hintereinan- der gekoppelt werden. Die notwendige Stabilität wird über die Neigeeigenschaften und die Gewichtsverlagerung des Fahrers erreicht. Dazu sind die Module mit geeig- neten Gelenken auszustatten. Es besteht die Möglichkeit sowohl weitere Personen- module als auch Gepäckmodule zu koppeln. Mögliche Gepäckmodule sollen dabei ohne eigenen Antrieb und Energiespeicher auskommen. [13] Abbildung 2-7: Verbindung der Einräder nebeneinander (li.) und hintereinander (re.) [13] Modulares Elektrofahrzeug DFKI EO1 Patentnummer: DE 202012002846 U1 Veröffentlichungsdatum: 20. Juli 2012 Antragsteller: Deutsches Forschungszentrum für künstliche Intelligenz Das am 20. Juli 2012 vom DFKI veröffentlichte Patent wurde bereits im Kapitel 2.2 vorgestellt. Das Fahrzeugkonzept des Micro-Fahrzeugs sieht eine Kopplung mit an- deren Modulen vor. Auf eine weitere Beschreibung soll daher in diesem Abschnitt verzichtet werden. 8
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
3 Anforderungen
3.1 Anforderungen an ein Stadtauto
Aufgrund des steigenden Verkehrsaufkommens insbesondere in Städten wird die
Nachfrage nach besonders stadtfreundlichen Fahrzeugen immer größer. Dabei gibt
es verschiedene Anforderungen an ein sogenanntes Stadtauto:
- Klein
- Wendig
- Einfache Bedienbarkeit
- Sparsam
- Umweltbewusst
- Günstig
- Sicher
- Variabel
- Komfortabel
Für die spezielle Ausrichtung eines Fahrzeugs für die Innenstadt ist besonders die
Größe entscheidend. Ist ein Fahrzeug klein und wendig, kann der Fahrer auch in der
Innenstadt problemlos einen Parkplatz finden und ist in der ganzen Stadt mobil. In
der heutigen Generation muss ein Fahrzeug jedoch noch viele weitere Faktoren er-
füllen, welche sich teilweise gegenseitig einschränken oder ausschließen.
Ein kleines Stadtauto sollte sehr einfach zu bedienen sein, damit jeder Fahrer das
Fahrzeug ohne Aufwand durch die Stadt manövrieren kann. Bedingt durch steigende
Kraftstoffpreise und ein höheres Bewusstsein für den Umweltschutz muss das Fahr-
zeug möglichst sparsam und umweltbewusst sein. Dazu kann das Fahrzeug auch
über alternative Antriebe verfügen, wenn die Bedien- und Nutzbarkeit des Fahrzeugs
nicht oder nur in annehmbarem Maße eingeschränkt wird. Der steigende Markt für
Klein- und Kleinstwagen lässt die Kaufpreise der Fahrzeuge sinken. Aufgrund der
gestiegenen Konkurrenz ist jeder Hersteller gezwungen, die Fahrzeuge so günstig
wie möglich anzubieten.
Neben den wichtigsten Anforderungen klein, sparsam und günstig gibt es weitere
Anforderungen, welche bei der Kaufentscheidung berücksichtigt werden. Dazu gehö-
ren der Komfort und die Variabilität des Fahrzeugs.
9Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Das bedeutet, dass das Fahrzeug nicht nur zum Parken in kleinen Parklücken ge-
nutzt werden kann sondern auch für den Transport von mindestens zwei Personen
und den Einkauf. Selbstverständlich muss ein Fahrzeug alle gängigen Vorschriften
bezüglich der Sicherheit der Fahrzeuginsassen und weiterer Verkehrsteilnehmer er-
füllen, bevor es für den Markt zugelassen wird. Darüber hinaus ist heute der Sicher-
heitseindruck, welchen das Fahrzeug vermittelt besonders wichtig geworden. Jeder
Autofahrer möchte sich in seinem Auto sicher fühlen, auch wenn es sich um einen
Kleinwagen handelt.
Die Erfüllung dieser in den letzten Jahren gestiegenen Anforderungen speziell an ein
Stadtfahrzeug ist nicht leicht und erfordert bei der Umsetzung immer neue Ideen,
Erfindungen und Kreativität. Da nicht immer alle Anforderungen erfüllt werden kön-
nen oder die Hersteller besondere Anforderungen verfolgen, müssen für jedes Fahr-
zeugkonzept die eigenen Anforderungen formuliert werden. Erst dann kann mit der
Konzeption des Fahrzeugs begonnen werden.
3.2 Anforderungen an das Konzept
Im Rahmen des Belegs Fahrzeugkonzepte soll ein koppelbares Stadtauto konzeptio-
niert werden. Angepasst an neue Ideen, allgemeine Anforderungen an ein Stadtauto
und die Umsetzung der Fahrzeugkopplung werden nachfolgend die Anforderungen
an das spezielle Fahrzeugkonzept erläutert. Im Verlauf der Fahrzeugkonzeption wer-
den verschiedene Überlegungen der Umsetzung der Anforderungen dargestellt.
Sämtliche Entscheidungen im Konzeptionierungsprozess werden getroffen, um die
Anforderungen an das koppelbare Stadtauto bestmöglich zu erfüllen.
- Klein
- Wendig
- Simple Handhabung
- Führerschein Klasse B
- Sicher
- Elektroantrieb
- Variabilität
- Koppelbar
10Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Das zu konzeptionierende Fahrzeug soll gemäß den Anforderungen an ein Stadtauto
klein und wendig sein. Dazu ist gegebenenfalls die Lenkbarkeit der Vorder- und Hin-
terachse denkbar. So soll die Handhabung des Fahrzeugs in verschiedensten Situa-
tionen gewährleistet werden. Bei der gesamten Bedienung und Nutzung des Fahr-
zeugs soll die einfache Handhabung berücksichtigt werden.
Eine weitere sehr wichtige Rolle spielt die Sicherheit des Fahrzeugs. Bei sämtlichen
Entscheidungen und Konzeptionierungen muss die Sicherheit der Fahrzeuginsassen
mit berücksichtigt werden, damit am Ende ein Fahrzeug entsteht, was neben der
Wendigkeit und der guten Nutzbarkeit in der Stadt, auch ein sicheres Gefühl vermit-
telt.
An die Variabilität des Fahrzeugs werden hohe Anforderungen gestellt. Dazu soll das
Fahrzeug koppelbar sein. Das bedeutet das Fahrzeug verfügt über zwei Sitzplätze
zum Transport von maximal zwei Personen und einem kleinen Einkauf. Dieses Fahr-
zeug soll mit einem weiteren genau gleichen Fahrzeug verbunden werden können.
Damit können entweder zwei weitere Sitzplätze oder Laderaum geschaffen werden.
Für die Nutzung des Fahrzeugs als Laderaum ist der Innenraum variabel zu gestal-
ten. So können zum Beispiel Sitze einfach und schnell ausgebaut oder weggeklappt
werden, um den Platz als Laderaum zu verwenden. Insgesamt sollen bis zu drei
Fahrzeuge zu einem Gesamtfahrzeug gekoppelt werden und im Stadtverkehr genutzt
werden können. Die Fahrzeuge sollen dabei alle gleich sein und erst durch kleine
Handgriffe zu unterschiedlich nutzbaren Modulen werden.
Die Handhabung der Fahrzeuge soll auch im gekoppelten Zustand sehr einfach sein.
Jeder volljährige Fahrer in Deutschland, der im Besitz eines Führerscheins der Klas-
se B ist, soll das Fahrzeug sicher fahren und manövrieren können.
Für den Antrieb der Fahrzeuge soll ein Elektromotor genutzt werden, um die Emissi-
onen in der Innenstadt so gering wie möglich zu halten. In welcher Form dieser ver-
wendet wird, ist zunächst nicht vorgeschrieben. Somit soll der Faktor Umweltschutz
und Sparsamkeit verfolgt werden. Durch die Kopplung der Fahrzeuge soll ein Modul
ebenfalls als weiterer Energiespeicher dienen können und so die Reichweite des
Fahrzeugs erweitern.
11Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Die zu verfolgende Idee hinter dem Konzept soll die speziell auf die Stadt abge-
stimmte individuelle Nutzung des Fahrzeugs sein. So kann beispielsweise eine Fami-
lie mehrere der Fahrzeuge besitzen und diese an ihren Lebensalltag angepasst nut-
zen (Abbildung 3-1).
Für eine dreiköpfige Familie mit einem bereits volljährigen Kind kann das bedeuten,
dass die Mutter morgens ein Fahrzeug nutzt, um damit zur Arbeit zu fahren. Der Va-
ter nutzt ebenfalls ein Fahrzeug und fährt zur Arbeit. Außerdem nimmt das Kind das
dritte verfügbare Fahrzeug, um damit zur Schule oder zur Uni zu fahren. Am Abend,
Wochenende oder in den Ferien können die drei Fahrzeuge dann einfach zu einem
Gesamtmodul gekoppelt werden, um für gemeinsame Unternehmungen genutzt zu
werden oder um mehr Laderaum oder Reichweite zu erhalten.
Abbildung 3-1: Nutzung der einzelnen Module [14]
Entstehen soll den erläuterten Anforderungen entsprechend ein koppelbares Stadt-
auto mit Elektroantrieb. Übertragen auf die englische Sprache bedeutet das:
- connectable city car -
In diesem Begriff sind die wichtigsten Anforderungen an das Konzept enthalten. Da-
her trägt das Konzept im Folgenden den Namen:
- c³ -
12Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
3.3 Anforderungen an den Innenraum
Außen klein, innen groß – so wird das Raumkonzept des c³ für den Passagier wirken.
Nur weil das Fahrzeug klein ist, braucht es sich nicht klein anzufühlen. Im c³ genießt
der Passagier das großzügige Raumgefühl eines Minivans, sei es durch die vorgezo-
gene Frontscheibe oder durch die aufrechte Sitzposition. So finden auch groß ge-
wachsene Menschen ausreichend Platz, um sich wohl zu fühlen. Die erhöhte Sitzposi-
tion trägt dazu bei, dass der Fahrzeugführer auch im dichten innerstädtischen Verkehr
den Überblick behält.
Weiterhin soll der c³ über einen modularen Innenraum verfügen. Dieser ermöglicht es
den Gepäckraum je nach Bedarf leicht und schnell zu vergrößern oder zu verkleinern.
Durch die variabel ein- und ausklappbaren Sitze sind folgende Innenraumkonfigurati-
onen des c³ möglich:
Platz für zwei Personen mit kleinem Gepäckraum
Diese Konfiguration werden wahrscheinlich die meisten Personen im Alltag nutzen, da
so problemlos zwei Personen mit einem Fahrzeugmodul fahren können und dabei
hinter den Sitzen kleine Gepäckstücke, wie z.B. eine Aktentasche unterbringen kön-
nen.
Platz für eine Person und Gepäck
In dieser Konfiguration wird der Beifahrersitz zusammen geklappt, sodass der Stau-
raum hinter den Sitzen sich um die Fläche des Beifahrerraumes vergrößert. Dies kann
praktisch sein, wenn man spontan viel Gepäck transportieren muss.
Gepäckmodul
In dieser Konfiguration werden Fahrer- und Beifahrersitz zusammen geklappt, sodass
das komplette Fahrzeug zu einem Laderaum wird. Dies geht nur, wenn das Modul
von einem anderen Modul gezogen wird.
13Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte 4 Konzeption Im Folgenden werden Konzeptideen für die einzelnen Fahrzeugkomponenten vorge- stellt und miteinander verglichen. Anhand der Bewertung der verschiedenen Mög- lichkeiten kann im Anschluss die beste Fahrzeugkonfiguration bestimmt werden. 4.1 Antrieb des Fahrzeugs In diesem Abschnitt werden unterschiedliche Antriebsvarianten für das Konzept des c³ vorgestellt. 4.1.1 Grundlagen Elektromotoren Wie aus den Anforderungen des Konzepts hervorgeht, soll der Antrieb des Konzept- fahrzeugs ausschließlich durch einen Elektromotor erfolgen. Durch den Antrieb des Fahrzeugs mit einem Elektromotor entstehen lokal keine gefährlichen Schadstoffe. Emissionen entstehen mitunter lediglich bei der Erzeugung der elektrischen Energie in Kraftwerken. Im Rahmen der Energiewende ist jedoch ein steigender Anteil an regenerativer Energieerzeugung zu verzeichnen, sodass zukünftig der CO2-Ausstoß bei der Energieerzeugung weiter abnimmt. Für das koppelbare Elektroauto werden ein oder mehrere Elektromotoren benötigt. Aufgrund der geforderten geringen Maße des Fahrzeugs, sollen kompakte Motoren mit einem geringen Gewicht verwendet werden. Zudem benötigt das Fahrzeug aus- reichend Leistung, um als Zugfahrzeug von mehreren Autos in Frage zu kommen. Elektromotoren weisen generell ein hohes Anfahrmoment sowie einen hohen Wir- kungsgrad auf. Wie in Abbildung 4-1 sichtbar, steht beim Elektromotor von Beginn an das volle Drehmoment zur Verfügung. Durch die Charakteristik des Elektromotors steht die maximale, konstante Leistung in einem großen Bereich zur Verfügung. Fer- ner gilt der Elektromotor als idealer Antriebsmotor für Fahrzeuge, da ein großer Drehzahl- und Drehmomentbereich abgedeckt wird. Eine Kupplung wird zum Anfah- ren mit einem Elektromotor nicht benötigt. Der Verbrennungsmotor hingegen benötigt eine bestimmte Mindestdrehzahl, wodurch eine Kupplung bzw. ein Drehmoment- wandler unausweichlich ist. 14
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Zudem erzeugt ein Verbrennungsmotor sein maximales Drehmoment erst bei höhe-
ren Drehzahlen.
Abbildung 4-1: Kennlinienvergleich Verbrennungs- und Elektromotor [15]
Um einen Zug aus mehreren Fahrzeugen in Bewegung zu bringen und somit die
Trägheit von mehreren Autos zu überwinden, ist der Einsatz eines Elektromotors
sehr von Vorteil. Die beim Bremsen frei werdende Energie kann zudem in die Batte-
rie zurückgespeist werden und erneut als Antriebsenergie zur Verfügung stehen
(Abbildung 4-2). Weiterhin weisen Elektromotoren nur sehr geringe Betriebsgeräu-
sche auf.
Nachteilig wirkt sich die relativ geringe Reichweite von Elektrofahrzeugen aus. Das
Problem wird jedoch von der Batterie verursacht. Da das zu konzipierende Fahrzeug
hauptsächlich im innerstädtischen Bereich eingesetzt werden soll, ergeben sich aus
der beschränkten Reichweite keine Nachteile.
Für den Antrieb eines Fahrzeugs mit Elektromotor werden diverse Komponenten be-
nötigt. Dabei handelt es sich um die Sicherstellung der Energiespeicherung im Fahr-
zeug. Zur Energiespeicherung wird eine Traktionsbatterie bzw. eine Brennstoffzelle
benötigt. Die gespeicherte Energie muss dem im Fahrzeug verbauten Elektromotor
bzw. den Elektromotoren zugeführt werden. Außerdem wird ein Ladegerät zum Auf-
laden der Traktionsbatterie benötigt. Dieses Ladegerät ist entweder als On-Board-
Ladegerät oder als externes Gerät realisierbar.
15Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte Abbildung 4-2: Energiefluss im Elektrofahrzeug [14] Der Umrichter bzw. die Leistungselektronik dient als Verbindungsglied zwischen Bat- terie und Elektromotor. Er hat die Aufgabe den Elektromotor aus der Batterie zu speisen bzw. anzusteuern. Der Umrichter muss nach dem verwendeten Elektromotor ausgewählt werden. Da die Traktionsbatterie eine Gleichspannung speichert, wird bei Verwendung von Gleichstrommaschinen als Antriebsmotor der Umrichter als Gleichstromsteller ausgeführt. Hier wird lediglich auf ein höheres oder niedrigeres Spannungsniveau invertiert. Kommen hingegen Drehstrommotoren, wie Synchron- oder Asynchronmaschinen zum Einsatz wird ein symmetrisches Drehfeld benötigt. Der Gleichstrom aus der Batterie muss demzufolge wechselgerichtet werden. Die beim Bremsen erzeugte Wechselspannung muss zur Speicherung in der Batterie zunächst durch den Umrichter gleichgerichtet werden. Außerdem benötigt der Elekt- romotor eine Kühlung um eine Überhitzung zu verhindern. Wird der Motor als Zentralmotor ausgeführt, wird außerdem ein Getriebe mit Differential sowie eine Kraftübertragungseinrichtung auf die Antriebsräder benötigt. [17] In der Abbildung 4-3 sind verschiedene Antriebsstrang-Konfigurationen dargestellt. Die Konfigurationen sollen im Folgenden näher erläutert werden. Abbildung 4-3: Antriebsstrang- Konfigurationen [17] 16
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Das System "Vorder- oder Hinterradantrieb" bietet sich vor allem für bestehende
Fahrzeugmodelle an. Dabei kann der Verbrennungsmotor durch einen zentralen
Elektromotor ersetzt werden und die Batterie den Platz des Kraftstofftanks einneh-
men. Das Fahrwerk kann zudem weitestgehend aus dem bestehenden Fahrzeug-
modell übernommen werden, wodurch die Achsen am Auto ebenfalls gleich bleiben
können.
Die Fa. IAV bietet z. B. ein Aggregat an, welches Elektromotor, Leistungselektronik,
Achsgetriebe sowie das Differential in einem Gehäuse vereint. Dieses Modul ist so-
wohl für den Verbau an der Hinterachse- als auch an der Vorderachse geeignet. In
der Abbildung 4-4 ist die starre Hinterachse des Peugeots iON abgebildet. Die Ab-
bildung dient als Beispiel für einen zentralen Elektromotor.
Abbildung 4-4: Zentraler Elektromotor im Peugeot iON [16]
Bei der Verwendung eines zentralen Elektromotors ist ein Achsgetriebe meist zwin-
gend erforderlich. Dies hat zum einen den Grund, dass das Drehmoment auf beide
Räder verteilt und Drehzahlunterschiede des kurveninneren und kurvenäußeren Ra-
des ausgeglichen werden müssen. Zum anderen werden zentrale Elektromotoren
meistens als Schnellläufer mit Drehzahlen über 6000 U/min verwendet. In diesem
Fall ist ein Getriebe mit ein bis zwei Untersetzungsstufen notwendig, um die Dreh-
zahl herabzusetzen.
17Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte Die Konfigurationen Tandemantrieb sowie Radnabenanrieb gelten als radnahe An- triebsformen. Bei dieser Antriebsform wird jedes Rad durch einen eigenständigen Elektromotor angetrieben. Dadurch entfällt das beim Zentralmotor nötige Differential. Drehzahlunterschiede können individuell über den jeweiligen Elektromotor gesteuert werden und somit ist eine Drehmomentverteilung auf die Antriebsräder realisierbar. Dieses System wird in der Fahrzeugtechnik als "Torque-Vectoring" bezeichnet und stellt die Umkehrung des Electronic Stability Control (ESC) dar. Befindet sich das Fahrzeug in einer gefährdeten Situation, z.B. durch Glatteis oder überhöhte Ge- schwindigkeit in Kurven, kann das Drehmoment individuell verteilt werden und die Fahrzeugsicherheit erhöht werden. Aber auch die Einzelradabbremsung, wie es das Sicherheitssystem ESP vorsieht, ist durch zwei Elektromotoren einfach realisierbar. Zudem ergibt sich eine verbesserte Manövrierbarkeit. Durch die gezielte Drehzahl- und Drehmomentverteilung kann bei dem Verbau der Motoren an der Hinterachse eine gezielte Lenkunterstützung über die Hinterachse erfolgen. Komplexe Hinterrad- lenkungen, wie sie z.B. in den Ober- und Luxusklassefahrzeugen von BMW angebo- ten werden, sind nicht erforderlich. Bei der Tandemkonfiguration wird der Elektromotor radnah mit einer Wellenverbin- dung zur Radnabe angebracht. In der Abbildung 4-5 ist exemplarisch ein System der Fa. Bosch abgebildet. Abbildung 4-5: Tandemantrieb an einer Mehrlenkerhinterachse [16] 18
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Weiterhin besteht die Möglichkeit, die Elektromotoren direkt am Radträger der Achse
zu befestigen. Dadurch können kürzere Antriebswellen realisiert werden. Zudem ent-
steht mehr Platz im Innenraum des Fahrzeugs und die klassischen Antriebselemente
wie Kardanwelle, Differential sowie das Getriebe fallen weg. Durch den Wegfall der
Übertragungsverluste wird zudem eine Wirkungsgradsteigerung des Antriebs er-
reicht.
Es ergibt sich jedoch der Nachteil von höheren ungefederten Massen. Die maximale
Größe der Elektromotoren ist zudem an die Größe des Rades gebunden. Außerdem
sind die Motoren durch die Lage im Rad äußeren Umweltbedingungen ausgesetzt.
Eine völlige Abschirmung gegen Staub, Spritzwasser oder Salz ist kaum möglich.
Beim Radnabenmotor sind sämtliche Antriebsfunktionen im Rad integriert, wodurch
das Rad mit dem Elektromotor eine Einheit bildet. Der Radnabenmotor ist sowohl als
Innenrotor oder Außenrotor ausführbar (Abbildung 4-6). Bei einem Radnabenmotor
mit Innenrotor ist die drehende Welle des Motors (Rotor) direkt mit der Radnabe ver-
bunden.
Abbildung 4-6: Radnabenmotor als Innen- und Außenläufer [16]
In der Ausführungsform Außenrotor dreht sich das Gehäuse des Motors. Dazu ist
eine spezielle Felge für den Antrieb des Fahrzeugs notwendig. Durch den größeren
Wellendurchmesser ergibt sich jedoch auch ein größerer Hebelarm, wodurch ein hö-
heres Drehmoment resultiert.
19Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte Neben die bereits aufgezählten Vorteile der Tandemkonfiguration, fallen bei Verwen- dung von Radnabenmotoren die Antriebswellen weg. Durch den Wegfall der An- triebswellen können größere Radeinschlagwinkel des Fahrzeugs realisiert werden. Somit stellt sich eine noch bessere Manövrierbarkeit des Fahrzeugs ein. Das vom Radnabenmotor erzeugte Drehmoment erzeugt eine direkte Zugkraft an dem jeweiligen Rad. Dazu äußerte sich Peter Gutzmer als Leiter der Entwicklung bei der Fa. Schaeffler wie folgt: „So bieten hochintegrierte Radnabenantriebe neben ei- ner perfekten Raumnutzung auch deutliche Vorteile in puncto Manövrierbarkeit, Fahrdynamik sowie aktiver Sicherheit. Dies kann zukünftig insbesondere in Kombina- tion mit autonomem Fahren eine bedeutende Rolle spielen. Damit könnte der elektri- sche Radnabenantrieb zu einem Antrieb von übermorgen und einer wertvollen Er- gänzung des Antriebsfächers werden, der global gesehen weiterhin von dem zu- nehmend elektrifizierten verbrennungsmotorischen Antriebsstrang bestimmt werden wird.“ [18] Als kritisch gilt die Erhöhung der ungefederten Massen bei der Verwendung von Radnabenmotoren. Radnabenmotoren weisen im Allgemeinen ein Gewicht von bis zu 50 kg auf. Im Bereich des innerstädtischen Betriebs mit langsamen Fahrzeugge- schwindigkeiten relativiert sich jedoch dieses Problem. Weitere Nachteile bestehen bei Radnabenmotoren vor allem durch höhere Kosten und einen geringeren Wirkungsgrad des Elektromotors. Der geringe Wirkungsgrad der Radnabenmotoren resultiert durch die Verwendung von Gleichstrommaschinen als Antriebsform. Bei einem Zentralmotor sowie Tandemantrieb kommen hauptsäch- lich Asynchronmaschinen zum Einsatz, welche einen höheren Wirkungsgrad aufwei- sen. Außerdem ist das Fahrwerk bei der Verwendung von Radnabenmotoren neu auszu- legen. Dazu existieren Lösungen verschiedener Zulieferer. Die Fa. Schaeffler stellte im Jahr 2013 den Radnabenmotor "E-Wheel Drive" vor. Dieser flüssigkeitsgekühlte Radnabenantrieb integriert Antrieb, Leistungselektronik sowie Bremse im Rad. Die Firmen Bridgestone und Michelin entwickelten in der Vergangenheit einen Rad- nabenantrieb, welcher neben Bremse und Leistungselektronik auch die Federung- und Dämpfung des Fahrzeugs integriert. Die neu entwickelten Bremsen benötigen keine Hydraulikflüssigkeit und bremsen rein elektrisch. 20
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Zudem werden konventionelle Stoßdämpfer nicht mehr benötigt. Mit dem in Abbil-
dung 4-7 dargestellten Active Wheel der Fa. Michelin kann das Problem der höheren
ungefederten Massen somit verringert werden. Der Active Wheel ist sowohl mit einer
mechanischen Fahrwerksfeder als auch mit einer aktiven elektromechanischen Fe-
der-Dämpfer-Einheit ausgestattet. Dadurch kann das Fahrwerk an verschiedene
Umgebungs- und Fahrzustände angepasst werden.
Abbildung 4-7: Michelin Active Wheel [19] Abbildung 4-8: Siemens eCorner [20]
Der Prototyp eCorner von der Fa. Siemens geht noch einen Schritt weiter und inte-
griert eine elektrische Lenkung im Modul (Abbildung 4-8). Mit diesem Radnabenan-
trieb ist das Fahrzeug völlig frei von Servo- und Bremsflüssigkeiten und somit auch
von dessen Trägheit. Lenkungs- und Bremsvorgänge können daher noch direkter
und präziser stattfinden. Allerdings ist zu beachten, dass bei einem derartigen Ein-
satz die elektronischen Systeme völlig störungsfrei arbeiten müssen, um Gefahren
vorzubeugen. "Mit einer Markteinführung ist jedoch nicht vor 2020 zu rechnen." [16]
Alle Radnabenmotoren weisen den Vorteil auf, dass völlig neue Fahrzeugkonzepte
realisierbar sind. Jeglicher Bauraum, welcher heute für Verbrennungsmotor, Getriebe
oder Mitteltunnel genutzt wird, wird bei der Verwendung von Radnabenmotoren nicht
mehr benötigt. Somit kann das Package flexibel gestaltet werden und der Fahrzeug-
innenraum völlig neue Strukturen aufweisen. Mit diesen Radnabenantrieben können
somit neuartige Fahrzeugkonzepte realisiert werden.
Die Auswahl einer geeigneten Antriebskonfiguration erfolgt im Kapitel 5.
21Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
4.1.2 Vergleich der Elektroantriebe
Nach Vorstellung der verschiedenen Antriebsformen sollen im folgenden Abschnitt
die Konfigurationen Vorder- oder Hinterradantrieb, Tandemantrieb und Radnabenan-
trieb verglichen werden. Für die genannten Varianten wird im Folgenden eine Bewer-
tungsmatrix angelegt, die die spezifischen Vor- und Nachteile der Prinzipien verdeut-
licht. Dabei bedeuten die Bewertungskriterien ausformuliert folgendes:
Ein-/Ausstieg: Auswirkungen auf die Platzierung der Insassen in Bezug
zu den Achsen und den damit verbundenen möglichen
Türkonturen
Package: gute Raumausnutzung im Fahrzeug,
Nähe der Antriebskomponenten zueinander
Kosten: Aufwand der Konstruktion, Anzahl der Teile
Gewicht: möglichst geringe Gesamtmasse
Manövrier- gute Rangier- und Einparkfähigkeiten
Kühlung: mögliche Lage der Kühlsysteme in Bezug zum Antrieb
Stauraum: Freihaltung von Bauraum für das Gepäck
Wirkungsgrad Motor: Verhältnis von abgegebener und zugeführter Leistung
Wirkungsgrad Antrieb: Verhältnis von abgegebener und zugeführter Leistung
Tabelle 1: Bewertungsmatrix Antriebskonfiguration [14]
Zentralmotor Tandemantrieb Radnabenantrieb
Ein-/Ausstieg 0 + ++
Package 0 + ++
Kosten ++ 0 -
Gewicht ++ 0 0
Dynamik + + +
Manövrierfähigkeit 0 + ++
22Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Kühlung ++ + -
Stauraum - 0 ++
Wirkungsgrad Motor ++ ++ -
Wirkungsgrad Antrieb - 0 ++
Der Zentralmotor hat insbesondere Vorteile in den Bereichen Kosten, Gewicht, Küh-
lung und Wirkungsgrad. Wie bereits erwähnt wurde, eignet sich der Zentralmotor vor
allem für den Einbau in bestehenden Modellen. Der Elektromotor kann in diesem Fall
den Platz des Verbrennungsmotors einnehmen. Die Kühlung des Verbrennungsmo-
tors ist an dieser Position uneingeschränkt und unproblematisch möglich. Somit ist
jedoch auch bei Verwendung eines Zentralmotors das bestehende Package der je-
weiligen Fahrzeugklasse weitestgehend einzuhalten. Durch die Verwendung von An-
triebswellen, Differential und Achsgetriebe ergeben sich wesentliche Nachteile im
Wirkungsgrad des Antriebs.
Bei der Verwendung eines Tandemantriebs können alle Vorteile des Torque-
Vectoring optimal genutzt werden. Achsgetriebe und Differential entfallen. Jedoch
werden zum Antrieb der Räder weiterhin Antriebswellen benötigt. Zudem ergeben
sich höhere Kosten für die Motoren als bei der Verwendung eines Zentralmotors.
4.2 Traktionsbatterie
Zum Betrieb des Elektromotors ist eine Traktionsbatterie erforderlich. Für die Ver-
wendung von Batterien in Kraftfahrzeugen kommen ausschließlich wiederaufladbare
Batterien in Betracht. Diese werden auch als Sekundärzellen oder Akkumulatoren
bezeichnet. Für den Einsatz im Fahrzeug werden viele Sekundärzellen zu einem
Modul zusammengefasst. Zur Erhöhung der Spannung werden diese Module in Rei-
he zusammengeschaltet. Durch die Bündelung von mehreren Reihenschaltungen
wird die Kapazität der Batterie entsprechend erhöht. Neben den Zellen befinden sich
in einem Batteriesystem Funktionen zum Thermomanagement sowie Sicherheitsein-
richtungen. [15]
23Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte Die Batterie gilt als wichtigstes und teuerstes Element im Antriebsstrang des Elekt- romotors. In erster Linie wird die mögliche Reichweite des Fahrzeugs von den physi- kalischen, elektrochemischen und wirtschaftlichen Randbedingungen der Batterie bestimmt. [17] Die Energiespeicherung mit Batterien ist der ausschlaggebende Grund, weshalb der Elektroantrieb für Kraftfahrzeuge noch nicht flächendeckend eingesetzt wird. In der Abbildung 4-9 sind weitere Anforderungen an die Batterie dargestellt. Insbe- sondere konkurrieren die Zielanforderungen an die Leistungs- und Energiedichte. Die Energiedichte beschreibt, welcher Energieinhalt bezogen auf die Masse in der Ener- gie gespeichert werden kann. Die Leistungsdichte beschreibt hingegen, welche Leis- tung pro Masse abgegeben werden kann. Demzufolge ist zur Realisierung einer ho- hen Reichweite eine möglichst hohe Energiedichte erforderlich. Für eine akzeptable Beschleunigung ist jedoch eine hohe Leistungsdichte erforderlich. Eine hohe Leis- tungsdichte ist bei dem koppelbaren Elektroauto vor allem notwendig, wenn das Fahrzeug als Zugfahrzeug zum Einsatz kommen soll. Im schlechtesten Fall muss ein Auto zwei Fahrzeuge mit leerer Batterie ziehen. In diesem Fall ist ein hohes Be- schleunigungsvermögen notwendig, um den Zug in Bewegung zu setzen. [15] Abbildung 4-9: Anforderungen an die Traktionsbatterie [14] 24
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Vergleicht man die Energiedichte einer modernen Metall-Hybrid-Batterie (80 Wh/ kg),
mit dem Flüssigkraftstoff Diesel [12640 Wh/kg], so übersteigt die Energiedichte von
Diesel die der Batterie um das 158-fache. Eine hohe Energie der Traktionsbatterie
steht demzufolge im Zielkonflikt mit deren Gewicht. [21]
Zudem sollen die Kosten der Batterie so gering wie möglich sein. In den meisten Fäl-
len tragen die Kosten der Batterie zu einem Drittel des Fahrzeugpreises bei. Der
Preis der Batterie steigt zudem mit der Energiedichte. Die Zyklenbeständigkeit der
Batterie steht in einem engen Zusammenhang mit der Lebensdauer. Zu dieser zählt
vor allem die kalendarische Lebensdauer der Batterie. Des Weiteren müssen Batte-
rien eine hohe Sicherheit aufweisen. Dies trifft vor allem im Falle eines Crashs oder
einem Fahrzeugbrand zu.
In Abbildung 4-10, dem sogenannten Ragone-Diagramm sind gängige Batterietypen
dargestellt. Darin sind deren Energiedichte auf der X-Achse und deren Leistungs-
dichte auf der Y-Achse aufgetragen. Insbesondere bei den heute verwendeten Li-
Ionen-Batterien geht eine hohe Energiedichte auf Kosten der Leistungsdichte.
Die wichtigsten Traktionsbatterien sollen im Folgenden kurz aufgelistet werden:
Blei kostengünstigste Batterievariante, geringe Energiedichte,
oftmals in Kleinfahrzeugen
Nickel-Kadmium Schnellladeeigenschaft, günstige Herstellungskosten,
(NiCd) geringe Energiedichte, hoher Wartungsaufwand
Nickel-Metallhybrid ungiftig, hohe Zyklenfestigkeit,
(NiMH) geringe kalendarische Lebensdauer,
oftmals in Hybridfahrzeugen eingesetzt (Toyota Prius)
Lithium-Ionen hohe Energiedichte, kein Memory-Effekt,
hohe Zyklenfestigkeit
25Koppelbares Elektro-Stadtauto Belegarbeit Fahrzeugkonzepte Abbildung 4-10: Ragone-Diagramm [15] Die Entwicklung der Li-Ionen-Batterie ist noch nicht völlig ausgereift. Die Energie- dichte liegt bei Spitzen-Akkus derzeit bei Werten zwischen 160 und 180 Wh/kg. Bis zum Jahr 2020 sollen Werte bis zu 500 Wh/kg erreicht werden. [15] Dadurch wird der Li-Ionen-Akkumulator zukünftig eine immer größere Bedeutung erlangen. 4.3 Kopplung Durch eine Kopplung wird die Möglichkeit geschaffen, bis zu drei Elektro-Stadtautos miteinander zu verbinden (siehe Abbildung 4-11). Die Fahrzeuge c³ können so wie ein Zug vom vordersten Fahrer gelenkt werden und sich trotzdem separat wie ein Einzelfahrzeug fahren lassen. Als Kopplung wird im Folgenden die Verbindung der Fahrzeuge bezeichnet. Mit Kupplung ist das Bauteil gemeint, welches diese Verbin- dung herstellt. Bei der spezifischen Gestaltung der Fahrzeugkopplung müssen die an das Konzept gestellten Anforderungen berücksichtigt werden und bei der Auslegung der Kupplung Beachtung finden. Allgemeine Anforderungen an eine Fahrzeugkupp- lung, wie die störfreie Funktion oder dass sie verschleißfest ist, werden in der folgen- den Auswahl voraus gesetzt. 26
Koppelbares Elektro-Stadtauto
Belegarbeit Fahrzeugkonzepte
Abbildung 4-11: Kopplungsvarianten am Bsp. einer beweglichen Kopplung [14]
Die folgenden spezifischen Anforderungen müssen bei der Kopplung der Konzept-
fahrzeuge erfüllt werden:
- sichere Verbindung der Fahrzeuge
- platzsparend
- einfache Handhabung der Kupplung
- einfache Handhabung der gekoppelten Fahrzeuge
Zunächst besteht die Frage, ob die Fahrzeugmodule starr oder beweglich miteinan-
der verbunden sein sollen. Bei einer starren Verbindung sind die Fahrzeugkarossen
unbeweglich verbunden und wirken somit wie eine große Karosserie. Diese Art der
Kopplung bietet die konstruktiv einfachste Auslegung der Fahrzeugkupplung, hat je-
doch fahrdynamische Nachteile. Da sich die Achsen aller Fahrzeugmodule auf der
Fahrbahn befinden, werden Schwingungen und Bewegungen, welche durch Fahr-
bahnunebenheiten entstehen, immer auf alle Fahrzeuge übertragen. Dies könnte den
Komfort der Passagiere beeinträchtigen.
Weiterhin ist das Manövrieren mit einem Fahrzeug dieser Länge und mit bis zu sechs
Fahrachsen besonders im innerstädtischen Verkehr schwierig. Ebenso müssten bei
einer starren Kopplung der Fahrzeuge alle Achsen des c³ lenkbar ausgeführt sein,
damit sie einen gemeinsamen Momentanpol bilden (zu sehen in Kapitel 4.4.4).
27Sie können auch lesen