Masterarbeit Programmierung eines GNSS Planning Tools als Erweiterung für ArcMap - Universität Innsbruck
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Programmierung eines GNSS Planning Tools
als Erweiterung für ArcMap.
Masterarbeit
Zur Erlangung des akademischen Grades
Master of Science
Eingereicht von:
Daniel Suttor
Innsbruck, den 01.03.2020
Matrikelnummer: 01315925
Studienkennzahl: C 066 855
Betreuer: Ao. Univ.-Prof. Armin Heller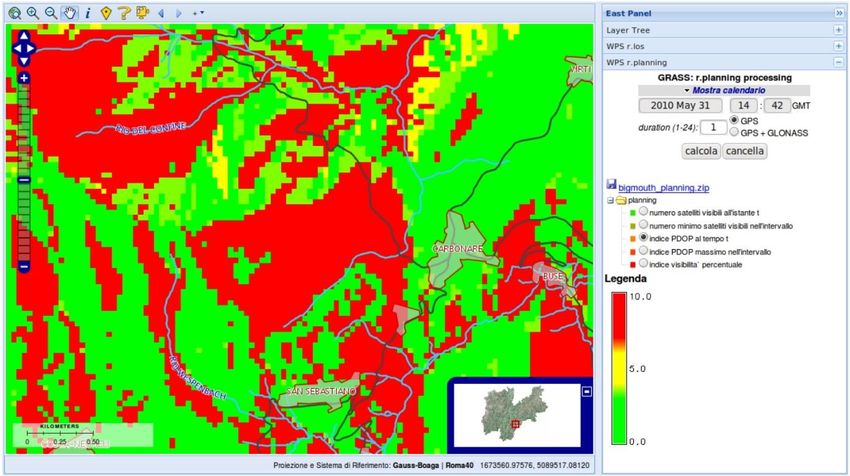
Eidesstattliche Erklärung
Ich erkläre hiermit an Eides statt durch meine eigenhändige Unterschrift, dass ich die vorliegende Arbeit
selbständig verfasst und keine anderen als die angegebenen Quellen und Hilfsmittel verwendet habe. Alle
Stellen, die wörtlich oder inhaltlich den angegebenen Quellen entnommen wurden, sind als solche kenntlich
gemacht.
Die vorliegende Arbeit wurde bisher in gleicher oder ähnlicher Form noch nicht als Masterarbeit eingereicht.
Datum Unterschrift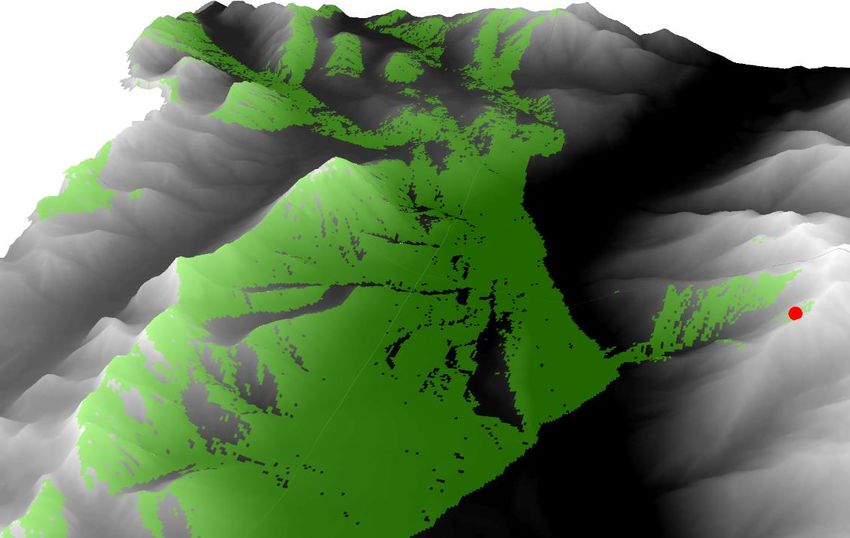
Inhaltsverzeichnis
1. Motivation & Ziel .......................................................................................................................1
2. Verfügbare Software ...................................................................................................................2
2.1. „Klassische“ Plansoftware .............................................................................................2
2.2. Wissenschaftliche Arbeiten ............................................................................................4
3. Grundlagen ….. ..........................................................................................................................8
3.1. Koordinatensysteme .......................................................................................................8
3.2. GNSS Systeme .............................................................................................................10
3.2.1. Global Navigation Satellite System ................................................................10
3.2.2. Galileo .............................................................................................................12
3.2.3. BeiDou ............................................................................................................13
3.3. NAVSTAR-GPS ..........................................................................................................14
3.3.1. Historische Entwicklung .................................................................................15
3.3.2. Kontrollsegment ..............................................................................................15
3.3.3. Weltraumsegment............................................................................................17
3.3.4. Benutzersegment .............................................................................................18
3.4. Positionsbestimmung ...................................................................................................18
3.4.1. Prinzip der Trilateration ..................................................................................18
3.4.2. Standortbestimmung bei GPS .........................................................................19
3.5. GPS-Signale .................................................................................................................20
3.5.1. Legacy Signale ................................................................................................20
3.5.2. Modernisierte Signale .....................................................................................20
3.5.3. GPS-Navigationsnachricht ..............................................................................22
3.6. Codes ............................................................................................................................23
3.6.1. C/A Code .........................................................................................................24
3.6.2. P-Code .............................................................................................................24
3.6.3. Modulationsverfahren .....................................................................................24
3.7. Enterfernungsmessung .................................................................................................25
3.7.1. Code-Messung.................................................................................................25
3.7.1. Phasenmessung ...............................................................................................27
3.8. Delusion of precision ...................................................................................................28
3.9. Fehler der Pseudostrecke ..............................................................................................30
3.9.1. Nutzerstreckenfehler ......................................................................................30
3.9.2. Signalausbreitungsfehler ................................................................................31
3.9.3. Atmosphärenfehler .........................................................................................31
3.9.4. Mehrwegausbreitungen ..................................................................................32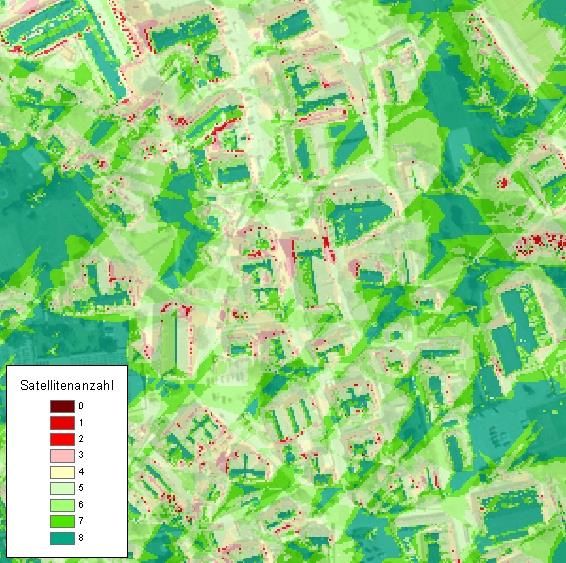
3.9.5. Empfängerfehler .............................................................................................33
3.10. GNSS-Erweiterungen ...................................................................................................34
3.10.1. DGPS ..............................................................................................................34
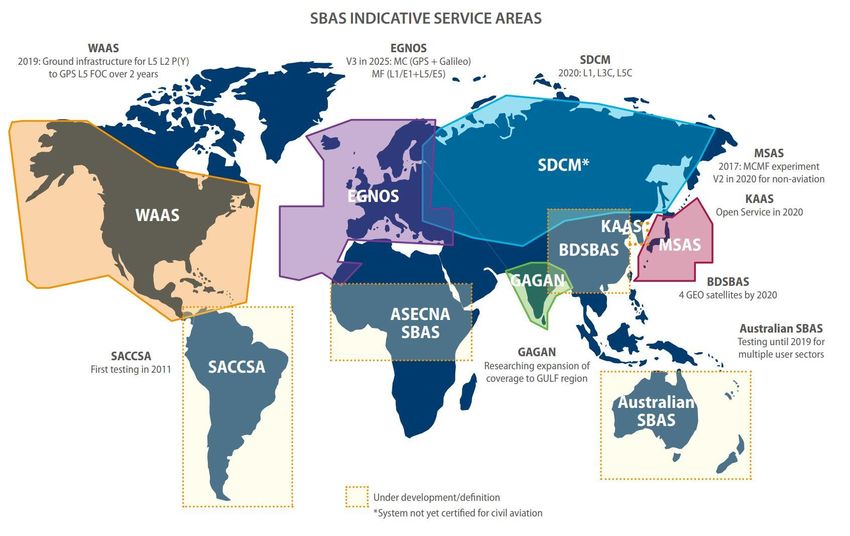
3.10.2. SBAS ..............................................................................................................35
3.10.3. RTK ................................................................................................................38
3.10.4. PPP .................................................................................................................39
3.10.5. RTK-PPP ........................................................................................................40
3.11. Digitale Höhenmodelle ................................................................................................40
3.11.1. Digitale Geländemodelle ................................................................................41
3.11.2. Digitale Oberflächenmodelle .........................................................................41
3.11.3. Rasterdaten .....................................................................................................41
3.11.4. TIN .................................................................................................................41
3.11.5. Höhenlinien ....................................................................................................42
4. Applikationsentwicklung...........................................................................................................43
4.1. Design ..........................................................................................................................43
4.1.1. Möglichkeiten zur Erstellung von ArcMap Werkzeugen ...............................43
4.1.2. ArcMap Werkzeuge für Sichtbarkeitsanalysen ..............................................44
4.1.3. Skyfield ..........................................................................................................46
4.1.3. NASA / NORAD Two Line Elements ...........................................................46
4.2. Aufbau der Nutzeroberfläche .......................................................................................48
4.3. Aufbau des Skriptes .....................................................................................................52
4.3.1. Vorbereitungen ................................................................................................54
4.3.2. Haupteil ...........................................................................................................57
5. Kontrollmessungen....................................................................................................................63
5.1. GNSS-Hardware...........................................................................................................63
5.2. Vorgehensweise ...........................................................................................................63
5.3. Ergebnisse ....................................................................................................................64
5.4. Fazit ..............................................................................................................................67
6. Ausblick ....................................................................................................................................68
Abbildungsverzeichnis ..............................................................................................................69
Tabellenverzeichnis ..................................................................................................................70
Literaturverzeichnis ..................................................................................................................71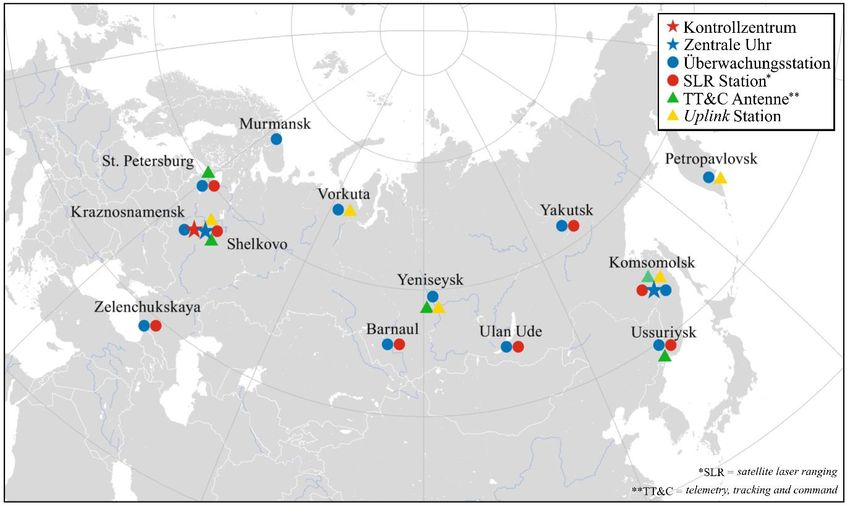
Zusammenfassung Bei den GNSS-Anwendungen, bei denen hochgenaue Messungen erforderlich sind, ist es sinnvoll die Satellitenkonstellation zum geplanten Messzeitpunkt vorherzusagen. Zu diesem Zweck steht diverse GNSS Planning Software zur Verfügung. Da sich die Analysen solcher Software jedoch auf ein Erdellipsoid ohne Erhebungen beziehen, sind die Ergebnisse solcher Programme unzureichend, wenn das Gelände Sichthindernisse aufweist, etwa im Gebirge oder im urbanen Raum. Im Zuge dieser Masterarbeit entstand ein GNSS Planning Tool als Erweiterung für ArcMap, das diese Abschattung der Satelliten berücksichtigt. Das Werkzeug wurde als ArcMap Skriptwerkzeug erstellt. Dadurch kann das Werkzeug auf alle Funktionen von ArcMap zugreifen, und diese mit sämtlichen Python Paketen kombinieren. Die Sichtbarkeitsanalysen wurden mit dem ArcMap Hillshade Werkzeug durchgeführt. Das Hillshade Tool wird für gewöhnlich herangezogen, um Gelände in einer Karte durch Schummerung optisch ansprechend zu gestalten, und dem Betrachter einen dreidimensionalen Eindruck zu vermitteln. Mit dem Hillshade Werkzeug können zusätzlich die Schatten von einer fiktiven Lichtquelle aus simuliert werden. Ersetzt man die Lichtquelle gedanklich durch einen Satelliten, können so die vom Satelliten aus sichtbaren und unsichtbaren Pixel bestimmt werden. Das Hillshade Werkzeug benötigt als Eingabe einen Azimut- und einen Elevationswinkel, sowie ein DHM. Diese Winkel werden anhand des Python Pakets Skyfield ermittelt. Skyfield kann anhand von Satellitenbahnelementen in Form von Two Line Element Dateien (TLE) die Position von Himmelskörpern für einen angegebenen Zeitpunkt ermitteln. Zusätzlich können die benötigten Azimut- und Elevationswinkel bestimmt werden, sofern ein Beobachtungspunkt angegeben wird. Diese Vorhersage basiert auf dem SGP-4 Modell. Die TLE-Dateien werden automatisch von der online Plattform CelesTrak heruntergeladen. Zusätzlich können nutzereigene TLE-Dateien eingebunden werden. Die berechneten Winkel werden dem Hillshade Tool übergeben, und das resultierende Raster wird anschließend in sichtbare und nicht sichtbare Pixel reklassifiziert. Dieser Vorgang wird für alle Satelliten wiederholt, und die sichtbaren Pixel aller reklassifizierten Raster werden aufsummiert. Im aufsummierten Raster entspricht jedes Pixel der Anzahl der von dort aus sichtbaren Satelliten. Diese Sichtbarkeitsanalyse lässt sich entweder für einen einzelnen Zeitpunkt oder eine Zeitreihe durchführen. Um zu überprüfen, inwieweit die Ergebnisse des Tools mit der Wirklichkeit übereinstimmen, wurden im Feld Kontrollmessungen durchgeführt. Als Messgerät kam dabei ein Trimble Geo7x mit externer Zephyr 2 Antenne zum Einsatz. Die Messungen wurden an fünf verschiedenen Standorten durchgeführt, die so gewählt wurden, dass sie unterschiedlich große Abschattungen durch das Gelände aufweisen. Bis auf eine Ausnahme lag die Abweichung der gemessenen Anzahl an Satelliten zu der vorausgesagten jeweils bei eins. Damit liegen die Abweichungen in einem akzeptablen Bereich.
1. Motivation & Ziel
Globale Navigationssatellitensysteme (GNSS) sind aus dem modernen Alltag nicht mehr wegzudenken.
Sie ermöglichen es dem Nutzer in Echtzeit seine dreidimensionale Position in einem einheitlichen
Bezugssystem zu bestimmen. Bei zahlreichen Anwendungen sind dabei Genauigkeiten im Meter-
Bereich ausreichend, so zum Beispiel bei herkömmlichen Navigationssystemen für Fahrzeuge. Andere
Anwendungen erfordern jedoch weitaus höhere Genauigkeiten, etwa im Fachbereich des
Vermessungswesens. Mit der entsprechenden Ausrüstung sind solche hochgenauen Messungen im
Millimeter-Bereich mit GNSS erreichbar.
Grundsätzlich braucht ein GNSS-Empfänger freie Sicht auf mindestens vier Satelliten, um die Position
zu bestimmen. Eine höhere Anzahl an sichtbaren Satelliten erhöht dabei die erreichbaren Genauigkeiten.
Neben der Anzahl der Satelliten, hat auch die Geometrie der Konstellation Einfluss auf die Genauigkeit.
Für geodätische Anwendungen ist demnach eine vorteilhafte Satellitenkonstellation ausschlaggebend,
wenn hochgenaue Messungen erforderlich sind. Die GNSS-Satelliten sind auf mehrere Bahnebenen in
etwa 20.000 km Höhe verteilt und bewegen sich mit Geschwindigkeiten von rund 14.000 km/h fort. Die
Satellitenkonstellation unterliegt also einem ständigen Wandel.
Sind hochgenaue Messungen erforderlich, ist es demnach sinnvoll die Satellitenkonstellation zum
geplanten Messzeitpunkt vorherzusagen. Zu diesem Zweck steht diverse GNSS Planning Software zur
Verfügung. Solche Programme erlauben es dem Nutzer, anhand der Bahndaten die Anzahl der
sichtbaren Satelliten an einzelnen Standorten für einen gewünschten Zeitraum zur bestimmen. Da sich
solche Sichtbarkeitsanalysen jedoch auf ein Erdellipsoid ohne Erhebungen beziehen, kommt die
Aussagekraft dieser Vorhersagen schnell an ihre Grenzen, wenn das Gelände Sichthindernisse aufweist.
Auch die Messwerte der Konstellationsgeometrie werden dadurch verfälscht. So kann es vorkommen,
dass als ideal eingestufte Zeitpunkte aufgrund der GNSS Abschattung sich als ungeeignet für
hochgenaue Messungen erweisen. Besonders in Gebirgen und im urbanen Raum ist die Nützlichkeit
herkömmlicher GNSS Planning Software demnach eingeschränkt.
Ziel dieser Masterarbeit ist es, ein GNSS Planning Tool als Erweiterung für das GIS Programm ArcMap
zu erstellen. Dieses Tool soll alle grundsätzlichen Funktionen herkömmlicher Plansoftware umfassen.
Allerdings sollen die Vorhersagen nicht auf einem Erdellipsoid ohne Erhebungen basieren, sondern auf
von den Nutzern eingebundenen digitalen Höhenmodellen. Dabei können sowohl digitale Oberflächen-
als auch Geländemodelle verwendet werden. Der entscheidende Vorteil einer solchen Vorgehensweise
liegt darin, dass dadurch die Abschattung der GNSS-Satelliten bestimmt werden kann. Das erhöht die
Qualität der Bestimmung von optimalen Stand- und Zeitpunkten für die Messung, und es können
unnötige Wartezeiten im Feld vermieden werden. Weiterhin werden die Berechnungen für die gesamte
Fläche des eingebundenen Höhenmodells durchgeführt, anstatt nur für einzelne Standorte, wodurch die
Auswahl des Messstandorts erleichtert wird.
1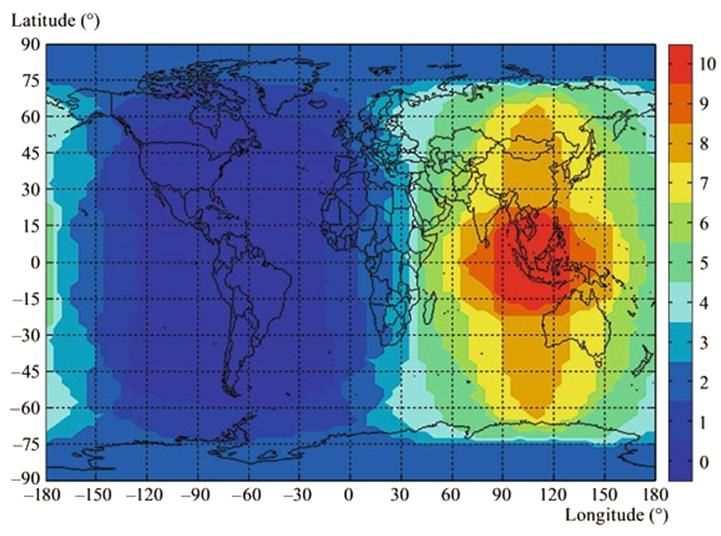
2. Verfügbare Software
Folgendes Kapitel gibt einen Überblick über die bestehende GNSS-Plansoftware. Dabei wird zunächst
die „klassische“ Plansoftware vorgestellt, bevor auf diverse wissenschaftliche Arbeiten eingegangen
wird, die das Abschattungsproblem bereits angegangen sind.
2.1. „Klassische“ Plansoftware
Zur Vorhersage der Satellitenkonstellation und der Sichtbarkeit der Satelliten an bestimmten
Standorten, stehen dem Nutzer zahlreiche Programme zur Verfügung. Solche Planwerkzeuge sind teils
eingebunden in umfangreichere Softwarepakete (z.B. Leica Infinity), sie stehen teils als eigenständige
Programme zur Verfügung (z.B. RTKLIB), und sie sind teils in Webseiten integriert (z.B. Trimble GNSS
Planning). Dabei gibt es sowohl kostenpflichtige Lösungen namenhafter Hersteller, als auch kostenfreie
Open Source Angebote. Zwar gibt es zahlreiche Optionen, doch ihr Funktionsset ist meist sehr ähnlich,
sie unterscheiden sich primär in der Nutzeroberfläche und Bedienung. Zudem haben alle gemein, dass
das Abschattungsproblem nicht ausreichend berücksichtigt wird. Die Funktionsweise solcher
„klassischer“ Plansoftware wird im Folgenden anhand des Trimble GNSS Planning Werkzeugs
beispielhaft dargestellt.
Abbildung 1: Die Einstellungsparameter des Trimble GNSS Planning Tools. In diesem Beispiel wird die
Simulation für den vierten Juli 2020 durchgeführt, ab 7 Uhr morgens, für einen Zeitraum von 6 Stunden. Der
Standort ist das Gelände der Universität Innsbruck.
Das Trimble GNSS Planning Werkzeug steht online kostenfrei zur Verfügung, und soll es dem Nutzer
erlauben bestmögliche Zeitpunkte für geplante GNSS Messungen zu ermitteln. Im Vergleich zu
alternativen Anwendungen ist beim Trimble GNSS Planning vor allem die hohe Benutzerfreundlichkeit
2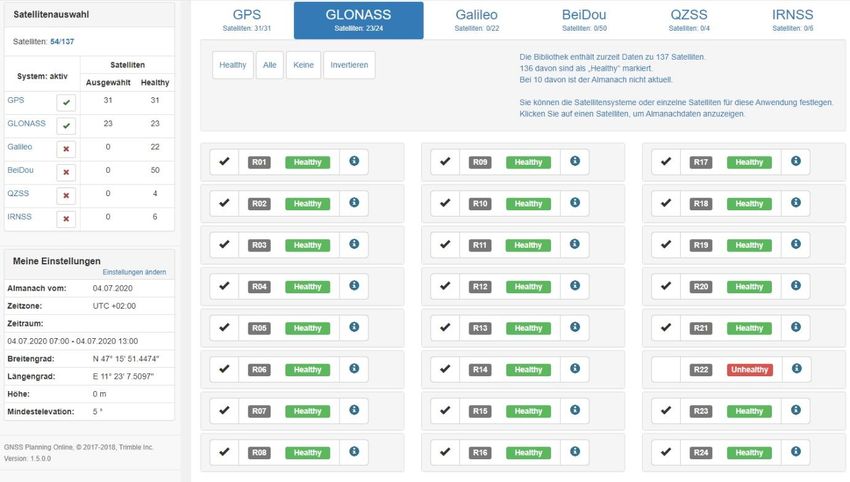
hervorzuheben. Das Tool benötigt dabei drei wesentliche Eingaben durch den Nutzer: die Position, den
Zeitraum der Simulation, und die zu berücksichtigten Satelliten (Abbildung 1 und 2). Die Eingabe der
Position erfolgt entweder durch die manuelle Angabe des Breiten- und Längengrads, oder durch die
Auswahl anhand einer interaktiven Karte. Zusätzlich kann die Höhe des Standorts angegeben werden.
Der Zeitraum wird über den gewünschten Startzeitpunkt und die Dauer, unter Angabe einer Zeitzone,
ermittelt. Die unterstützten GNSS-Systeme sind GPS, GLONASS, Galileo, BeiDou, QZSS und IRNSS.
Die entsprechenden Almanac-Dateien, welche Informationen über die Satellitenlaufbahnen enthalten,
werden automatisch heruntergeladen. Dabei kann im Einzelnen angegeben werden, welche Satelliten
der jeweiligen Systeme berücksichtigt werden sollen. Für jeden Satelliten wird außerdem der
momentane Status angegeben (ob healthy oder unhealthy). Eine weitere Angabe betrifft die
Mindestelevation: der dabei angegebene Wert beschreibt den kleinstmöglichen Winkel über dem
Horizont den ein Satellit haben muss, um für die Simulation berücksichtigt zu werden. Dies ist insofern
relevant, dass das Signal tiefer stehender Satelliten eine längere Strecke durch die Ionosphäre
zurücklegt, was sich negativ auf die Qualität des Signals auswirkt (siehe Kapitel 3.8.3).
Abbildung 2: Die Auswahl der GNSS Anbieter erfolgt über die Kachel oben Links. In diesem Fall werden nur die
GPS und GLONASS Satelliten berücksichtigt. Die Kachel unten Links gibt einen Überblick über die gewählten
Einstellungen. Das Hauptfeld zeigt den Status der Satelliten und erlaubt eine genaue Auswahl der zu
berücksichtigten Satelliten. In diesem Fall werden die GLONASS Satelliten angezeigt, von denen einer den Status
„Unhealthy“ aufweist, und entsprechend nicht für die Simulation herangezogen wird.
Die Ergebnisse der Simulation werden in diversen Diagrammen und anhand einer Weltkarte dargestellt.
Die Diagramme liefern Angaben über die Anzahl der sichtbaren Satelliten, ihren Elevationswinkel, die
DOP-Werte (siehe Kapitel 3.8), sowie Informationen bezüglich der Ionosphäre (Elektronengehalt und
Iono-Index) (Abbildung 3). Anhand des Skyplot-Diagramms lässt sich zudem die Lage der Satelliten im
3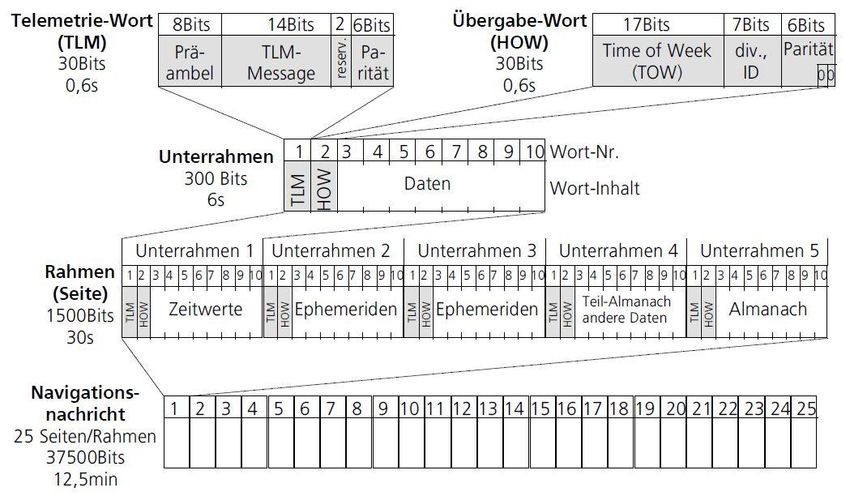
Himmel auslesen. Die Weltkarte stellt die zweidimensionale Position der Satelliten dar, und gibt
Auskunft über deren Bahnen. Zusätzlich besteht auch dort die Möglichkeit den Zustand der Ionosphäre
darzustellen.
Abbildung 3: Die beiden primären Ausgaben des Trimble GNSS Planning Tools sind die Diagramme
„Satellitenanzahl“ und „DOPs“. Im hier dargestellten Beispiel liegt der günstigste Messzeitpunkt bei 10:40 Uhr.
Dieser Zeitpunkt weist sowohl die höchste Anzahl an Satelliten, als auch die günstigste Geometrie der
Konstellation auf. Um 7:40 Uhr ist die Anzahl der Satelliten zwar identisch, die DOP-Werte sind jedoch höher,
was auf eine ungünstigere Konstellation hinweist.
2.2. Wissenschaftliche Arbeiten
Neben der „klassischen“ Plansoftware wurden bereits mehrfach Programme entworfen, mit denen sich
zusätzlich die Abschattung der GNSS-Satelliten durch das Gelände erfassen lässt. Solche Programme
entstanden im Rahmen diverser wissenschaftlicher Arbeiten. Diese Tools haben dabei allesamt ähnliche
Funktionsweisen wie das Werkzeug, das im Rahmen dieser Masterarbeit erstellt wurde. Keines dieser
Werkzeuge steht jedoch öffentlich zur Verfügung.
4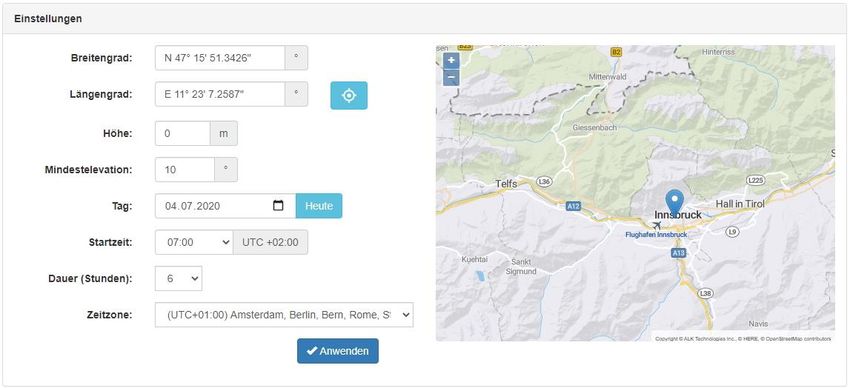
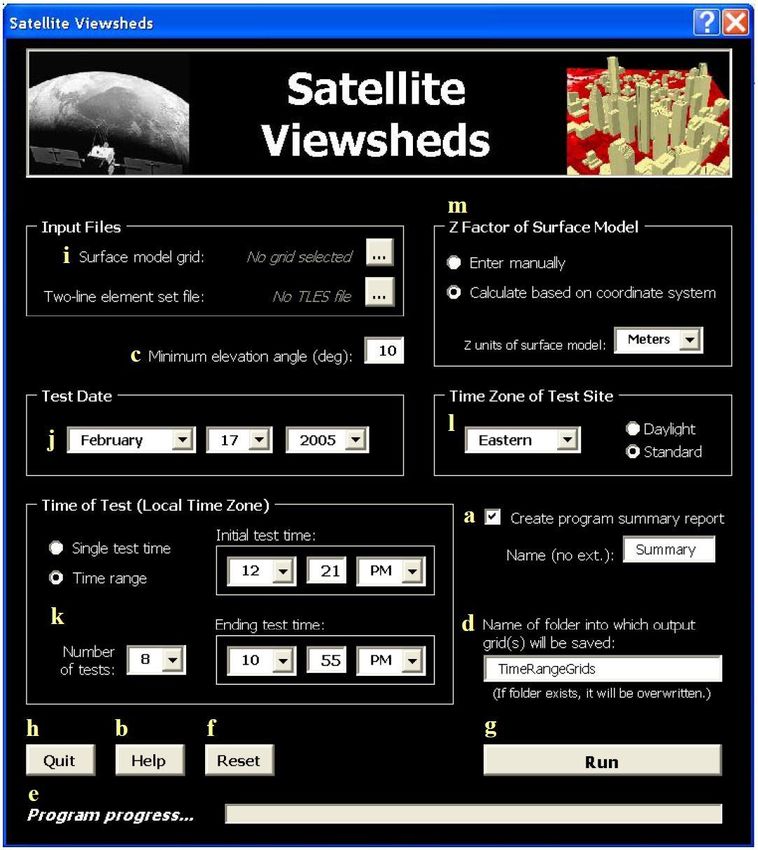
Abbildung 4: Die Nutzeroberfläche des Werkzeugs von Germoth und Carstensen (2005). Quelle: Germoth und
Carstensen 2005, S.9.
Bei Germoth und Carstensen (2005) entstand eine Erweiterung für ArcMap 9 (Abbildung 4). Anhand
dieser Erweiterung lässt sich die Abschattung von Satelliten durch das Gelände ermitteln. Die
Informationen zum Gelände ergeben sich aus nutzergeladenen digitalen Höhen- oder Geländemodellen.
Zur Bestimmung der Sichtbarkeit der Satelliten wird auf das Hillshade Werkzeug zurückgegriffen. Die
Positionen der Satelliten und deren Winkel zum Nutzer, die an das Hillshade Werkzeug übergeben
werden, ergeben sich aus nutzergeladenen Two line element Dateien (TLE) (siehe Kapitel 4.1.4). Über
die Berechnungen, die durchgeführt wurden um aus den TLE-Dateien die Winkel zu bestimmen, geben
die Autoren keine Auskunft. Dadurch, dass TLE-Dateien verwendet werden, ist das Werkzeug mit allen
GNSS kompatibel, und auch die Abschattung von SBAS-Satelliten lässt sich bestimmen. Das Werkzeug
lässt sich entweder für einen einzelnen Zeitpunkt oder für eine Zeitreihe durchführen. Die Dillusion of
Precesion Werte (DOP), die Auskunft über die Qualität der Konstellationsgeometrie geben, lassen sich
mit diesem Werkzeug nicht berechnen (siehe Kapitel 3.7). Das Ausgabeformat sind Raster die pro Pixel
die Anzahl der sichtbaren Satelliten zum angegebenen Zeitpunkt enthalten.
5Abbildung 5: Ein Ausgaberaster des Werkzeugs von Greifender (2007). Dargestellt ist die Anzahl der sichtbaren
GPS-Satelliten pro Pixel zum 31.12.2006 um 17:00 Uhr in Bad Goisern. Quelle: Greifender 2007, S.49.
Ein ähnliches Programm entstand bei Greifeneder (2007) im Rahmen einer Masterarbeit. Dabei handelt
es sich um ein eigenständiges Programm, welches mit Hilfe von ArcObjects auf die Funktionen von
ArcMap 9.1 zugreift. Die Funktionsweise in grundsätzlich identisch zum Tool von Germoth und
Carstensen. Die beiden Werkzeuge unterscheiden sich lediglich hinsichtlich der Methode zur Ermittlung
der Satellitenpositionen. Bei Greifeneder wird statt einer TLE-Datei eine Almanac-Datei verwendet.
Dadurch lassen sich potenziell höhere Genauigkeiten erreichen. Das Werkzeug ist auf GPS-Satelliten
beschränkt, andere GNSS können in Greifeneders Werkzeug nicht berücksichtigt werden. Auch die
DOP-Werte können nicht berechnet werden. Die Ausgabe sind Raster, in denen pro Pixel die Anzahl
der sichtbaren Satelliten dargestellt ist (Abbildung 5).
Bei Gandolfi und La Via (2010) entstand ein komplett eigenständiges Programm, das nicht auf einem
bestehendem GIS basiert. Als Programmiersprache wurde dabei C++ verwendet. Das Programm kann
sowohl die Sichtbarkeit von GNSS-Satelliten, als auch die DOP-Werte bestimmen. Es bietet diverse
Ausgabeformate, etwa verschiedene Arten von Diagrammen (Skyplots, Liniendiagramme der DOP-
Werte und der Anzahl an sichtbaren Satelliten) und Raster (Anzahl an sichtbaren Satelliten pro Pixel,
6DOP-Werte pro Pixel). Die nutzergeladenen digitalen Höhenmodelle müssen in UTM projiziert sein,
damit das Programm sie verwenden kann. Weiterhin handelt es sich um ein reines Kommando-
zeilenprogramm ohne graphische Nutzeroberfläche.
Federici et al. bieten seit 2011 ein webbasiertes Planning Tool an (wobei dieses Stand Juli 2020 nicht
aufrufbar ist). Das Werkzeug basiert auf dem Open Source GIS GRASS. Hier können zwei Arten von
Raster generiert werden: die Anzahl der sichtbaren Satelliten pro Pixel und die DOP-Werte pro Pixel,
jeweils für einen einzelnen Zeitpunkt (Abbildung 6). Das Tool ist auf die italienische Region Trentino
beschränkt, ein entsprechendes Geländemodell ist integriert. Das Werkzeug ist zudem auf GPS und
GLONASS beschränkt.
Abbildung 6: Das Web-Tool von Federici et al. (2011). Die Karte zeigt pro Pixel den PDOP Wert der GPS-
Konstellation. Quelle: Federici et al. 2011, S.7.
73. Grundlagen
In folgendem Kapitel werden die grundlegenden Informationen zum Verständnis der Arbeit dargelegt.
Als erstes wird dabei auf die Koordinatensysteme eingegangen. Darauf folgt ein Überblick zu den
bestehenden GNSS Anbieter, bevor die Funktionsweise eines GNSS anhand von GPS näher erläutert
wird. Anschließend wird auf die Faktoren eingegangen, die Genauigkeit der Standortmessung negativ
beeinflussen und die Systeme zum Ausgleich dieser Fehler werden erläutert. Abschließend wird das
Thema der digitalen Höhenmodelle kurz angerissen.
3.1. Koordinatensysteme
Eine Herausforderung bei der Nutzung von GNSS besteht darin, dass weltweit zahlreiche
unterschiedliche Koordinatensysteme genutzt werden. Eine mit GNSS gemessene und berechnete
Position muss demnach oft erst in ein lokales Bezugsystem transformiert werden, bevor sie
weiterverwendet werden kann. Der Grund für diese zahlreichen Koordinatensysteme liegt im
Wesentlichen darin, dass die tatsächliche Gestalt der Erde nicht einer Kugel entspricht, sondern einer
geometrisch nicht berechenbaren Form. Eine erste Annährung an die tatsächliche Form der Erde wird
als Geoid bezeichnet und richtet sich nach einem hypothetischen Meeresspiegel. Das Geoid ist ein
theoretischer Körper, der durch das Schwerefeld der Erde definiert ist. Die Oberfläche des Geoids
schneidet die Feldlinien der Schwerkraft dabei überall im rechten Winkel (Abbildung 7). Da die
Schwerkraft der Erde ungleichmäßig verteilt ist, liegt das Niveau des Meeresspiegels nicht auf einer
geometrisch definierbaren Form. Um mathematische Operationen leichter durchführen zu können wird
daher eine Annäherungsform verwendet: das Rotationsellipsoid (Zogg 2009, S.18).
Abbildung 7: Die Beziehung zwischen Erde, Geoid und Ellipsoid. Die Geoidondulation N ergibt sich aus der
Abweichung der gemessenen, orthmometrischen Höhe H und der ellipsoidischen Höhe h. Eigene Darstellung,
nach Zogg 2009, S.21.
Ein Rotationsellipsoid entsteht durch die Drehung einer Ellipse um eine ihrer Achsen. Als
Annäherungsform kann es das globale Schwerefeld der Erde nicht korrekt darstellen. Im Gegensatz zum
Geoid trifft die natürliche Lotrichtung (d.h. die Richtung der Schwerebeschleunigung) nicht im rechten
8Winkel auf das Rotationsellipsoid. Der Unterschied der wahren Lotlinie und der Ellipsoidnormale wird
als Lotabweichung bezeichnet (Abbildung 7). Diese Lotabweichung führt zu einer falschen Projektion
von Punkten der Erdoberfläche. Allerdings ist es möglich, durch das Erstellen von kleineren, lokal
angepassten Rotationsellipsoiden diesen Fehler für gewisse Flächen zu minimieren. So hat quasi jedes
Land eigene Ellipsoide entwickelt, die für das eigene Land als Bezugsfläche für Vermessungen gelten
(Tabelle 1). Sie bilden das Geoid für den jeweiligen Raum möglichst genau ab. Da sie nur für relativ
kleine Flächen gelten, ist die Anzahl der verfügbaren Referenzellipsoide entsprechend hoch (Zogg 2009,
S.19-20).
Große Halbachse Abplattung
Land Name Referenzellipoid Lagerungspunkt (m) (1: … )
Deutschland Potsdam Bessel 1841 Rauenberg 6377397.155 299.1528128
Frankreich NTF Clarke 1880 Pantheon, Paris 6378249.145 293.465
Monte Mario,
Italien SI 1940 Hayford 1928 6378388.0 297.0
Rom
Niederlande RD / NAP Bessel 1841 Amersfoort 6377397.155 299.1528128
Österreich MGI Bessel 1841 Hermannskogel 6377397.155 299.1528128
Alte Sternwarte,
Schweiz CH1903 Bessel 1841 6377397.155 299.1528128
Bern
Abhängig vom
International Hayford Hayford 6378388.0 297.0
Land
Tabelle 1: Übersicht zu denen in Europa verwendeten Referenzellipsoiden. Bei gleichen Ellipsoiden liegt der
Unterschied im verwendeten Lagerungspunkt. Quelle: Zogg 2009, S.22.
Den GNSS liegen jeweils unterschiedliche Koordinatensysteme zu Grunde. Da die GNSS globale
Systeme darstellen, versuchen diese Koordinatensysteme die tatsächliche Form der Erde möglichst
exakt als Rotationsellipsoid zu beschreiben. GPS etwa basiert auf dem World Geodetic System aus dem
Jahr 1984. WGS84 ist ein geozentrisches Koordinatensystem, welches an der Drehung des Erdkörpers
teilnimmt (rechtsdrehend). Zwar ist WGS84 ein kartesisches System, es werden jedoch meist
ellipsoidische Koordinaten (φ, λ, h) anstelle kartesischer Koordinaten (x, y, z) verwendet (Zogg 2009,
S.21. Bei Galileo wird das Galileo reference frame (GTRF) verwendet, bei GLONASS das Parametry
Zemli 1990 (PZ-90) und BeiDou das BeiDou Coordinate System (BDC) (Sanz et al. 2011 und Yuanxi
et al. 2012, S.83).
Die Beziehung zwischen einem globalen, geozentrischen und einem lokalen System bezeichnet man als
geodätisches Datum. Bei einer Datumstransformation werden Verschiebung, Drehung und Streckung
angewandt. Sind die Achsen des globalen und des lokalen Systems parallel, reichen für die
Transformation drei Verschiebeparameter. Andernfalls werden zusätzlich drei Drehwinkel und ein
9Skalierungsfaktor benötigt. Eine solche Datumstransformation wird als 7-Parameter-Transformation
bezeichnet und stellt die häufigste Art der Transformation dar (Zogg 2009, S.22).
Im Vermessungswesen wird die Position eines Punktes üblicherweise anhand ellipsoidischer
Koordinaten angegeben (Breitengrat, Längengrat und Höhe). Da selbst einfache Distanzmessungen
anhand solcher Koordinaten umständlich sein können, wird das Ellipsoid auf eine zweidimensionale
Fläche projiziert, um geodätische Berechnungen zu vereinfachen. Dadurch entstehen ebene,
rechtwinklige, kartesische Koordinaten. Solche Projektionen sind immer mit Verzerrungen verbunden.
Je nach Projektionsverfahren kann entweder Flächen-, Längen-, und Winkeltreue erreicht werden (Zogg
2009, S.26).
3.2. GNSS Systeme
Der Begriff GPS (Global Positioning System) wird oftmals als Synonym für alle GNSS-Systeme
verwendet, steht aber eigentlich nur für das amerikanische System (offiziell NAVSTAR GPS). Neben
GPS gibt es drei weitere GNSS anderer Nationen, die sich entweder im Aufbau befinden, oder bereits
vollausgebaut sind. In diesem Abschnitt werden diese weiteren GNSS vorgestellt, bevor im nächsten
Kapitel anhand von GPS der prinzipielle Aufbau eines GNSS dargelegt wird.
3.2.1. Global Navigation Satellite System
Das Global Navigation Satellite System (GLONASS) ist ein russisches GNSS. Es hat seine Ursprünge
in der ehemaligen Sowjetunion und wurde ab Mitte der 1970er Jahre im Rahmen des Wettrüstens des
kalten Krieges entwickelt. Wie das amerikanische GPS ist GLONASS ebenfalls ein militärisches
System und steht auch heute noch unter militärischer Kontrolle. Das System wurde 1995 jedoch
zusätzlich für die zivile Nutzung freigeschaltet (Hofmann-Wellenhof et al 2007, S.341). Die
Funktionsweise von GLONASS unterscheidet sich zwar in Details von GPS, sie erfolgt aber im Grunde
nach den gleichen Prinzipien, sodass die beiden Systeme interoperabel sind. Die Laufbahnen der
Satelliten sind zudem im Vergleich zu GPS zugunsten einer besseren Abdeckung der Polarregionen
ausgerichtet. Weiterhin sind aus historischen Gründen die Kontrollstationen des Bodensegments nicht
global verteilt, sondern auf Standorte der ehemaligen Sowjetunion limitiert, was eine globale
Überprüfung des Systems erschwert (Xu und Xu 2016, S.7) (Abbildung 8).
10Abbildung 8: Das GLONASS Bodensegment. Quelle: Teunissen und Montebruck 2017, S.239, eigene Übersetzung.
In einer ersten Phase starteten ab 1982 bis 1985 diverse Testsatelliten welche dazu dienten, die Funktion
des Systems zu Überprüfen und gegebenenfalls Verbesserungen zu ermöglichen. In der zweiten Phase
wurde bis 1992 als Vorbereitung auf die operationale Phase die Satellitenkonstellation auf 12 erhöht.
Die Satelliten der ersten Generation erreichten nur Lebenszeiten von drei bis vier Jahren, so dass die
Anzahl der Satelliten in den Folgejahren stetig abnahm. Durch einen Mangel an Finanzierung wurden
die fehlenden Satelliten zunächst nicht ersetzt, so dass das System zeitweise nicht voll funktionsfähig
war. Der Tiefpunkt wurde 2001 erreicht, als nur noch sechs Satelliten verfügbar waren. Die finanzielle
Situation verbesserte sich ab 2002 wieder, was einen erneuten Vollausbau des Systems ermöglichte.
Dazu wurden ab 2003 modernisierte GLONASS-M Satelliten gestartet, welche eine verbesserte
Lebenszeit von sieben bis acht Jahren aufweisen. Ab 2011 wurden erstmals neuartige GLONASS-K1
Satelliten eingesetzt. Der Vollausbau des Systems von 24 operativer Satelliten wurde schließlich 2011
erreicht (Hofmann-Wellenhof et al 2007, S.342) (Bauer 2017, S.335f) (Abbildung 9). Der Start der
GLONASS-K2 Satelliten war ursprünglich für 2014 geplant, wurde dann zunächst auf 2018 verschoben
und ist stand März 2020 für das Jahr 2022 angesetzt (Zak 2020). Ab 2023 soll die Flotte um sechs
GLONASS-V Satelliten erweitert werden. Diese sollen durch einen hohen Orbit die Signalverfügbarkeit
in Städten verbessern (RIA 2018). Stand März 2020 sind neben den 24 operativen Satelliten zwei
Reservesatelliten und ein Satellit im Testbetrieb im Einsatz (Information and Analysis Center for
Positioning, Navigation and Timing 2020).
11Abbildung 9: Die Anzahl der aktiven GLONASS Satelliten seit 1982. Über die genauen Zahlen gibt es
unterschiedliche Angaben, feststeht aber, dass Ende der 1990er Jahren ein erster Höhepunkt erreicht wurde, und
die Anzahl darauf hin stark gesunken ist. Seit 2002 hat sich die Lage dann wieder stetig verbessert. Eigene
Darstellung, nach Teunissen und Montebruck 2017, S.220.
3.2.2. Galileo
Seit 2016 ist mit Galileo erstmals auch ein europäisches GNSS verfügbar. Es wurde von der
Europäischen Union in Zusammenarbeit mit der European Space Agency (ESA) realisiert. Anders als
das amerikanische und das russische System, hat Galileo seinen Ursprung nicht in militärischen
Anliegen, sondern es wurde vor dem Hintergrund einer verstärkten europäischen Unabhängigkeit
entwickelt (GMV 2020). Weiterhin sollte Galileo die Genauigkeit der Positionsbestimmung für die
zivile Nutzung erhöhen, besonders im Vergleich mit der durch die Selective Availability bis ins Jahr
2000 für zivile Anwendungen auf rund 100 Meter gedrosselte Genauigkeit von GPS. Aufgrund einer
höheren Neigung zur Äquatorialebene bietet Galileo im Verglich zu GPS zudem eine bessere
Abdeckung höherer Breiten, wovon Nutzer in Nordeuropa profitieren. Galileo ist voll kompatibel mit
GPS und GLONASS, es leistet demnach einen Beitrag zur Gewährleistung einer global starken
Signalverfügbarkeit (GMV 2020).
Die Umsetzung des Systems erfolgte in zwei Phasen: die In-Orbit Validation Phase (IOV) und die Full
Operational Capacity Phase (FOC). Die IOV diente der Überprüfung des Systems anhand diverser Tests
und des Betriebs zweier experimenteller Satelliten, sowie einer auf vier Satelliten reduzierten Flotte
operativer Satelliten. Die experimentellen Satelliten starteten 2005 und 2008. Ihre Aufgaben bestanden
darin, die Eigenschaften der mittleren Erdumlaufbahn zu erfassen, sowie die Leistung der
Satellitenhardware (Atomuhren, strahlenfeste Bordcomputer, etc.) zu überprüfen. Die ersten vier
Satelliten der operativen Flotte erreichten 2011 und 2012 die Erdumlaufbahn. Sie dienten der
Überprüfung des gesamten Galileo Systems, inklusive des Bodensegments. Die erste Positions-
12bestimmung gelang am 12. März 2013. Die FOC hat das Ziel, Galileos Infrastruktur zu
komplementieren. In mehreren Intervallen folgten bis ins Jahr 2018 26 weitere operative Satelliten
(Europäische Kommission 2020). Mit dem Start der letzten beiden Satelliten erreicht Galileo
voraussichtlich Ende 2020 schließlich seine komplette Flotte von 30 Satelliten (ESA, 2020b). Dabei ist
anzumerken, dass der Ausbau des Systems ursprünglich für 2008 angesetzt war, es jedoch mehrmals zu
Verzögerungen kam. Außerdem liegt der finanzielle Aufwand mit rund 13 Milliarden Euro weitaus über
den anfangs geschätzten Kosten von 2,3 – 2,9 Milliarden Euro (Reillon, 2017).
Galileos Serviceangebot beinhaltet fünf Dienste (European Global Navigation Satellite Systems Agency
2020):
▪ Open Service (OS): Ein kostenloser und frei verfügbarer Dienst zur Positionsbestimmung
anhand gewöhnlicher Verbrauchergeräten und mit einer Genauigkeit im Meter Bereich.
▪ Public Regulated Service (PRS): Ein Dienst für von der Regierung autorisierte Nutzer für
Anwendungen die einen hohen Grad an Servicekontinuität voraussetzen, inklusive
Schutzfunktion gegen Störungen und zuverlässiger Problemerkennung.
▪ High Accuracy Service (HAS) (ehemals Galileo Commercial Service): Eine ehemals
kostenpflichtige und nun frei verfügbare Ergänzung zum OS, die Positionsbestimmungen
mit einer Genauigkeit im Sub-Meter Bereich ermöglicht.
▪ Commercial Authentication Service: Eine Ergänzung zum OS, die kontrollierten Zugang
ermöglicht und Authentifikationsfunktionen beinhaltet.
▪ Search and Rescue Service (SAR): Europas Beitrag zu COSPAS-SARSAT, einem
internationalen, satellitengestützten Such- und Rettungssystem.
3.2.3. BeiDou Navigation Satellite System
Das BeiDou Navigation Satellite System (BDS) ist ein Chinesisches GNSS. Der Name BeiDou stammt
von der Beidou Sternenkonstellation, die in China seit der Antike zur Navigation herangezogen wird.
BDS ist das jüngste vom International Committee on Global Navigation Satellite Systems (IGS) der
Vereinten Nationen als GNSS anerkanntes Navigationssystem. Die Funktionsweise und der Aufbau von
BeiDou sind vergleichbar mit den anderer GNSS, mit einem Weltraum-, Boden- und Nutzersegment.
Die BDS Signale stehen internationalen Nutzern weltweit frei zur Verfügung. Das System wurde zudem
gezielt auf Kompatibilität und Interoperationalität mit anderen GNSS hin entwickelt (Kaplan et al 2017,
S.273-274).
13Abbildung 10: Anzahl der BeiDou Satelliten zu Beginn der dritten Phase im Jahr 2013. Quelle: Teunissen und
Montenbruck 2017, 2.93.
Der Aufbau von BDS erfolgte in der drei Phasen. In der ersten Phase entstand zwischen 1994 und 2000
ein experimentelles aktives Navigationssystem mit regionaler Abdeckung für den asiatisch-pazifischen
Raum. Als aktives System ist dabei eine wechselseitige Kommunikation zwischen Satelliten und
Empfänger erforderlich, was die Anzahl der gleichzeitigen Nutzer einschränkt. Ab 2004 wurde mit der
Umsetzung des passiven Systems begonnen, zunächst ebenfalls nur für den asiatisch-pazifischen Raum.
Bei diesem passiven System senden nur die Satelliten Signale aus, die Empfänger hingegen verarbeiten
diese Signale lediglich und senden ihrerseits nichts aus. Dadurch ist die Anzahl der Nutzer nicht
eingeschränkt. Diese zweite Phase wurde 2012 abgeschlossen. In der aktuellen finalen Phase wird BDS
vom regionalen zum globalen System ausgebaut (Kaplan et al 2017, S.274) (Abbildung 10). Die
komplette BDS Konstellation besteht aus 35 Satelliten: fünf geostationäre Satelliten über dem asiatisch-
pazifischen Raum, drei Satelliten im inclined Orbit und 27 Satelliten mittlerer Erdumlaufbahn (MEO)
(ESA, 2014). Davon befinden sich derzeit (Stand Mai 2020) 34 im Orbit. Mit dem für Juni 2020
geplanten Start eines MEOs ist die Konstellation fertig gestellt (Xinhuanet 2020).
3.3 NAVSTAR-GPS
Das Navigation Satellite Timing and Ranging Global Position System, kurz NAVSTAR-GPS ist das
US-amerikanische GNSS. Der Begriff GPS wird häufig irrtümlicherweise synonym zum Begriff GNSS
als Überbegriff für alle Navigationssysteme verwendet. Im folgenden Abschnitt wird zunächst die
historische Entwicklung von GPS dargelegt, bevor die einzelnen Komponenten näher beschrieben
werden.
143.3.1. Historische Entwicklung
Das Navigation Satellite Timing and Ranging Global Position System, kurz NAVSTAR-GPS ist das
US-amerikanische GNSS. Es wird seit Anfang der 1970er-Jahren vom Verteidigungsministerium der
Vereinigten Staaten als Dual-Use-System für militärische Zwecke und zivile Nutzung entwickelt. Die
Anforderungen, die bei der Entwicklung an GPS gestellt wurden, waren dabei folgende: GPS soll dem
Nutzer zu jederzeit genaue Informationen über seine dreidimensionale Position, seine Geschwindigkeit
und die Zeit liefern, unabhängig von den Wetterbedingungen, seinem Bewegungszustand und seiner
Lage auf der Erde (Bauer 2017, S.297). Die Entwicklung des Systems verlief in drei Phasen (Hoffmann-
Wellenhof 2007, S.309 – 310) (Bauer 2017, S.297):
1. Überprüfungsphase (1974 – 1979): Diese Phase diente dazu zu überprüfen, ob die geplante
Konzeption dazu geeignet war, die Anforderungen zu erfüllen. Auch der militärische Wert des
Systems wurde geprüft und Kostenrechnungen wurden angestellt. Erste Testsatelliten wurden
gestartet.
2. Entwicklungsphase (1979 – 1985): Das Hauptaugenmerk dieser Phase lag auf der technischen
Entwicklung des Systems. Weitere Testsatelliten wurden gestartet und die Empfangssysteme
wurden entwickelt.
3. Ausbauphase (1985 – 1995): Das System wurde voll ausgebaut. Am 17. Juli 1995 wurde die
Erreichung der Full Operational Capacity bekannt gegeben.
GPS wurde von Anfang an, auch bereits vor der Fertigstellung, von zivilen Anwendern genutzt, so dass
bereits früh 80% aller GPS-Anwendungen ziviler Natur waren. Rund um GPS entstand besonders in den
USA eine neue Industrie mit Tausenden Arbeitsplätzen. Aus wirtschaftlichem Interesse der USA, und
zur Anpassung an militärische Anforderungen, wurde bereits 1995 über mögliche Modernisierungen
nachgedacht. Zudem drohte GPS und der amerikanischen Satelliten-navigationsindustrie durch das 1999
von der EU angekündigte GNSS Galileo Konkurrenz aus Europa. Die Modernisierung von GPS ist
spätestens seit 2005 durch den Start verbesserter Satelliten im Gange (Bauer 2017, S.298).
3.3.2. Kontrollsegment
Die Rolle des Kontrollsegments besteht darin, die Satelliten instand zu halten, und deren richtige
Funktionsweise sicherzustellen (Kaplan 2018, S. 107). Es besteht aus einer Masterstation in der US-
amerikanischen Stadt Colorado Springs, 11 S-Band Ground Antennas, 15 L-Band Monitorstationen,
sowie einer alternativen Masterstation in der Vandenberg Air Force Base (Abbildung 11). Durch die
globale Verteilung der Monitorstationen ist dabei sichergestellt, dass alle Satelliten jederzeit zu zwei
Stationen Sichtkontakt haben (Bauer 2017, S. 307). Die Monitorstationen, sowie die Ground Antennas
sind unbemannt und werden von der Masterstation überwacht. Von den Monitorstationen aus werden
täglich die Pseudostrecken, Trägerphasen, und die lokalen meteorologischen Verhältnisse gemessen.
15Diese Daten werden in ihrer rohen Form an die Masterstation weitergeleitet. Dort werden sie zunächst
vorbehandelt (Korrektur der ionosphärischer und troposphärischer Refraktion, Verringerung des
Messrauschens und der Mehrwegeinflüsse) und zur Berechnung der Satellitenbahnen (Ephemeriden)
und Uhrenfehler herangezogen. Aus diesen Informationen generiert die Masterstation die
Navigationsnachrichten, welche schließlich über die Ground Antennas an die Satelliten übermittelt
werden (Bauer 2017, S. 307-308) (Kaplan 2018, S. 137).
Abbildung 11: Das GPS-Kontrollsegment. Anders als bei GLONASS, ist das Bodensegment bei GPS global
verteilt. Quelle: NOAA (2020d).
Weiterhin überwacht die Masterstation den Zustand der Satelliten und deren Subsysteme, etwa den
Status der Solaranlagen, sowie den Batterie- und Treibstoffstand. Durch Stationkeeping werden zudem
die Orbitalpositionen der Satelliten korrigiert, falls diese fehlerhaft sind (Kaplan 2018, S. 107). Die
Masterstation hat ebenfalls die Kontrolle über die Sicherungsmaßnahmen des Systems, etwa die
Selective Availability (SA) und das Anti-Spoofing (AS). Durch die SA kann die Genauigkeit der
Messungen für zivile Nutzung auf 100m gedrosselt werden. Dazu werden die Satellitenbahndaten
verfälscht, und künstliches Verrauschen der Trägersignale eingeführt. Die SA ist momentan (stand März
2020) deaktiviert. Sie war zwischen Januar 1994 und Mai 2000 aktiv und kann jederzeit wieder
eingeschaltet werden (Bauer 2017, S.315 und Zogg 2009, S.52). Da die Satelliten der fünften Generation
(GPS III), von denen sich derzeit einer im Orbit befindet (Stand März 2020), SA nicht mehr unterstützen,
ist das endgültige Ende der SA jedoch absehbar (National Oceanic and Atmospheric Administration,
16kurz NOAA 2020a). Das AS dient dazu, das System manipulationsresistent gegenüber gefälschten
Signalen zu machen, indem der P-Code verschlüsselt wird. Dadurch wird vermieden, dass die GPS-
Empfänger von fremden Sendern ausgestrahlte Signale mit falschen Informationen als GPS-Signal
interpretieren und falsche Ortungen durchführen (Bauer 2017, S.315).
3.3.3. Weltraumsegment
Das Weltraumsegment besteht aus einer Konstellation von Satelliten, zu denen der Nutzer
Distanzmessungen durchführt. Die Satelliten senden PRN (pseudorandom noise) Signale an die
Erdoberfläche, anhand derer die Distanzmessungen durchgeführt werden. Da die Nutzer dabei nur das
Signal empfangen und selbst kein Signal aussenden, ist GPS für die Empfänger ein passives System.
Dadurch wird es ermöglicht, dass GPS von unendlich vielen Nutzern gleichzeitig verwendet werden
kann (Kaplan 2018, S. 106).
Die nominelle GPS-Satellitenkonstellation besteht aus 24 Satelliten, wovon drei Satelliten als aktive
Reservesatelliten dienen (Tabelle 2). Diese Konstellation wird momentan um sieben Satelliten erweitert
(Stand März 2020). Die zusätzlichen Satelliten dienen einer Verbesserung der Leistung des Systems, sie
zählen jedoch nicht zur zentralen GPS-Flotte (NOAA 2020b). Die Satelliten sind in sechs Bahnen in
20.180 km Höhe angeordnet, mit jeweils vier bis sechs Satelliten pro Bahn. Die aufsteigenden Knoten
der Bahnebenen sind um je 60° getrennt und die Bahnneigung beträgt 55°. Die große Halbachse der
Bahnen ist 26.609 km lang (Bauer 2017, S. 300 und Zogg 2009, S.44). Die Umlaufzeit der Satelliten
beträgt einen halben Sternentag, nach zwei Umrundungen nehmen die Satelliten demnach wieder die
gleiche Position relativ zum Erdkörper ein. Da ein Sternentag jedoch vier Minuten kürzer ist als ein
Sonnentag, erreichen die Satelliten die gleiche Position jeweils vier Minuten früher als am Tag zuvor
(Bauer 2017, S. 300). Aufgrund dieser Konstellation, und der großen Umlaufhöhe, ist sichergestellt,
dass zu jedem Zeitpunkt überall auf der Erde jeweils mindestens vier Satelliten sichtbar sind, sofern das
Signal nicht abgeschattet wird (Zogg 2009, S.46).
17Legacy Satelliten Modernisierte Satelliten
Block IIR
Generation Block IIA Block IIR Block IIF GPS III
(M)
Anzahl 1 in Betrieb 12 in Betrieb 7 in Betrieb 12 in Betrieb 1 in Betrieb
Lebensdauer 7,5 Jahre 7,5 Jahre 7,5 Jahre 12 Jahre 15 Jahre
Inbetriebname 1990 – 1997 1997 – 2004 2005 – 2009 seit 2010 seit 2018
▪ C/A Code ▪ C/A Code ▪ Alle legacy ▪ Alle IIR(M) ▪ Alle IIF
auf L1 auf L1 Signale Signale
Signale Signale
▪ P(Y) Code ▪ P(Y) Code ▪ Neues M- ▪ Drittes, zivile
▪ Viertes, zivile
auf L1 und L2 auf L1 und L2 Code Signal auf L5
Militärsignal Signal auf L1
▪ On-board ▪ Verbesserte ▪ keine S/A
Sonstiges Uhren- Signalstärke ▪ verbess. Ver-
überwachung lässlichkeit,
▪ Verbesserte
Genauigkeit
Genauigkeit & Integrität
Tabelle 2: Die fünf GPS-Generationen im Überblick. Quelle: Tamazin 2015 S.16, Zahlen aktualisiert.
3.3.4. Benutzersegment
Das Benutzersegment umfasst alle Geräte die in der Lage sind, GPS-Signale zu empfangen und daraus
die dreidimensionale Position, die Geschwindigkeit und die genaue Zeit zu bestimmen (ESA 2014). Der
Trend hin zur Miniaturisierung und Massenanfertigung der Komponenten hat in den letzten Jahrzenten
dazu geführt, dass kostengünstige GNSS Empfänger heute stark verbreitet sind. Sie befinden in
zahlreichen Geräten, die im Alltag gebräuchlich sind, etwa Smartphones, Kameras und Autos (Kaplan
2018, S. 156). Waren es 2006 noch rund 500.000 GPS-Empfänger (FAA 2006, zitiert nach DiBiase
2014, S.129), ist ihre Anzahl seitdem rasant angestiegen, allein die Anzahl der aktiven Smartphone
Nutzer wird für 2019 auf 3,12 Milliarden geschätzt (Tenzer 2019).
3.4. Positionsbestimmung
In diesem Abschnitt wird erläutert, wie es GPS gelingt die Position des Empfängers zu ermitteln. Dabei
wird zunächst das dabei angewandte Prinzip der Trilateration erklärt, bevor genauer auf die
Funktionsweise der Positionsbestimmung von GPS eingegangen wird.
3.4.1. Prinzip der Trilateration
Die GNSS Positionierung basiert auf dem Prinzip der Trilateration. Die Trilateration basiert auf Time-
of-arrival (TOL) Messungen von Signalen, deren Ausbreitungsgeschwindigkeit bekannt ist. Dabei wird
die Zeit gemessen, die ein Signal von einem Sender, dessen Position bekannt ist, bis zum Empfänger,
dessen Position bestimmt werden soll, benötigt. Die Signallaufzeit wird mit der Ausbreitungs-
18geschwindigkeit multipliziert, um die Distanz zwischen dem Sender und dem Empfänger zu bestimmen.
Misst man die Distanz zu mehreren Sendern, deren Positionen bekannt sind, lässt sich die Position des
Empfängers berechnen. Für eine dreidimensionale Position sind dabei in der Theorie drei Messungen
erforderlich (Länge, Breite und Höhe) (Kaplan et al. 2018, S.36).
3.4.2. Standortbestimmung bei GPS
Die Positionierung funktioniert bei allen GNSS nach den gleichen Prinzipien und wird im Folgenden
am Beispiel von GPS näher erläutert. Zunächst ist anzumerken, dass GPS ein passives System darstellt.
Demnach werden nur von den Satelliten aus Signale übermittelt. Die Nutzergeräte hingegen empfangen
und verarbeiten diese Signale lediglich, sie senden selbst keine Signale aus. Das hat den Vorteil, dass
das System von unbegrenzt vielen Nutzern gleichzeigt verwendet werden kann. Dadurch muss der
Informationsgehalt der GPS-Signale jedoch entsprechend hoch sein (Van Sickle 2015, S.1).
Um Trilateration anwenden zu können, werden zwei wesentliche Informationen benötigt: die Position
der GPS-Satelliten und die Entfernung des Nutzers zu den Satelliten. Die Position der Satelliten wird
über das Bodensegment an die GPS-Satelliten gesendet, und von dort aus anhand der so genannten GPS-
Navigationsnachricht an die Nutzer weitergeleitet. Die Distanz vom Empfänger zu den Satelliten wird
über Code- und Phasenmessung erfasst (siehe Kapitel 3.6). Da die dadurch gemessene Distanz stets
fehlerbehaftet ist, wird sie als Pseudostrecke oder Pseudoentfernung bezeichnet (siehe Kapitel 3.8). Bei
einer Messung zu nur einem Satelliten liegt die Position des Nutzers irgendwo auf der Oberfläche einer
Kugel. Wird ein zweiter Satellit hinzugenommen, kann der Standort des Nutzers auf einen Schnittkreis
zweier Kugeln eingegrenzt werden. Durch Messungen zu drei Satelliten ist eine dreidimensionale
Positionsbestimmung theoretisch möglich (Abbildung 12) (Kaplan et al. 2018, S.23). GPS benötigt
jedoch zusätzlich eine vierte Messung, um die Position eindeutig zu bestimmen.
Abbildung 12: Bei Distanzmessungen zu zwei Satelliten liegt die gesuchte Position in einem Schnittkreis zweier
Kugeln (1). Durch die Hinzunahme einer dritten Messung kann die Position theoretisch bestimmt werden (2).
Eine vierte Messung wird benötigt, um den Uhrenfehler des Empfängers auszugleichen. Quelle: Kaplan et al
2018, S.24 & S.25, verändert.
19Diese vierte Messung wird benötigt, um den Uhrenfehler des Empfängers auszugleichen. In den
Satelliten werden hochgenaue Atomuhren eingesetzt. Dadurch kann der Zeitpunkt, zu dem das Signal
versendet wird, genau bestimmt werden. Die Empfangsgeräte sind jedoch aus Kostengründen mit
weitaus ungenaueren Uhren ausgestattet. Dadurch kann der Zeitpunkt, an dem das Signal ankommt,
weniger genau bestimmt werden. Da die Messung der Strecke zwischen Satelliten und Empfänger auf
Zeitmessung basiert, wird die gemessene Strecke durch die Ungenauigkeit der Empfängeruhr verfälscht.
Durch eine vierte Messung kann dieser Uhrenfehler ausgeglichen werden (El-Rabbany 2001, S.8)
3.5. GPS Signale
GPS ist als dual-use System konzipiert, mit einer zivilen und einer militärischen Komponente. Die
Funktionen, die den zivilen Nutzern zur Verfügung stehen, werden als Standard Positioning Service
(SPS) bezeichnet. Jene die dem Militär vorbehalten sind, gehören zum Precise Positioning Service
(PPS). Dabei stehen den beiden Diensten unterschiedliche GPS-Signale zur Verfügung (ESA 2015).
3.5.1. Legacy Signale
Die GPS-Satelliten senden Signale in Form von elektromagnetischen Wellen auf zwei
Trägerfrequenzen. Die primäre Frequenz ist das L1 Signal (1575,42 MHz) mit einer Wellenlänge von
rund 19 cm. Die sekundäre Frequenz ist das L2 Signal (1227,6 MHz) mit einer Wellenlänge von rund
24 cm. Die Signale werden an Bord der Satelliten von der Atomuhr (entweder auf Rubidium oder
Cäsium Basis) generiert. Der Abstand der beiden Frequenzen von mehreren hundert Megahertz ist so
gewählt, damit sich durch Zweifrequenz-Messungen die ionosphärische Refraktion abschätzen lässt
(Kaplan et al 2018, S.169). Jeder Satellit generiert zwei Arten von Pseudozufallsfolgen (pseudorandom
noise codes): Ein Coarse/Acquisition-Code (seltener Clear Acquisition-Code) (C/A-Code) und ein
Protected-Code (seltener Precise-Code) (P-Code). Durch diese Codes können die Satelliten eindeutig
zugeordnet und identifiziert werden. Weiterhin dienen sie der Laufzeitmessung zur Bestimmung der
Distanz zwischen Empfänger und Satellit (El-Rabbany 2001, S.13-14). Der C/A Code (nur auf L1) steht
allen SPS Nutzern zur Verfügung und erlaubt Messungen mit einer Genauigkeit von 5 - 10 m (bei
standalone Messungen ohne Erweiterung). Der P-Code (auf L1 und L2) ist PPS Nutzern vorenthalten
und erlaubt Messungen mit einer Genauigkeit von 2 - 9 m (GMV 2015).
3.5.2. Modernisierte Signale
Seit 2005 unterliegt GPS einem Modernisierungsprozess. Im Rahmen dieses Prozesses werden der C/A
und der P-Codes um drei weitere zivile Signale ergänzt: L2C, L5 und L1C (Tabelle 3). Der C/A Code
wurde dabei in L1 C/A umbenannt. Weiterhin wurden auch die militärischen Signale erweitert, die im
Folgenden nicht näher beschrieben werden (NOAA 2020c).
L2C wird auf der L2 Trägerfrequenz übermittelt. Durch dieses Signal sollen Zweifrequenz-Messungen
kommerziellen zivilen Nutzern zugänglich gemacht werden. Professionelle Anwender, die bereits mit
Zweifrequenz-Messungen arbeiten, profitieren von schnelleren Erfassungszeiten und verbesserter
20Sie können auch lesen