High-Sensitivity GPS: Möglichkeiten und Grenzen der Anwendung
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
High-Sensitivity GPS: Möglichkeiten und Grenzen
der Anwendung
Andreas Wieser, Graz
Zusammenfassung
Der Wunsch, einen Mobiltelefonbenutzer automatisch zu lokalisieren, wenn er eine Notruf-
nummer wählt, sowie die steigende Nachfrage nach ortsbezogenen Diensten hat die Entwick-
lung von sogenannten high-sensitivity (HS) GPS Empfängern angetrieben. Sie ermöglichen
die Positionsbestimmung im Wald, in Straßenschluchten und selbst in Innenräumen. Während
sich solche Empfänger bereits in Mobiltelefonen, einfachen Navigationsgeräten und anderen
Massenmarkt-Artikeln finden, konnten sie sich in technischen Bereichen mit hohen Genauig-
keitsanforderungen noch nicht etablieren. Woran liegt das? Haben die Anwender das Potenti-
al noch nicht erkannt? Ist die Entwicklung noch nicht weit genug vorangeschritten?
Dieser Beitrag gibt einen Einblick in die Grundlagen von HS-GPS. Es wird diskutiert, warum
GPS Positionsbestimmung in abgeschatteten Bereichen überhaupt möglich ist, wie die Emp-
findlichkeit eines GPS Empfängers gesteigert werden kann, und welche zukünftigen Entwick-
lungen absehbar sind. Es zeigt sich, dass die Steigerung der Empfindlichkeit unweigerlich
eine Reduktion der Genauigkeit bewirkt. Auch zukünftig wird HS-GPS in erster Linie für
Anwendungen interessant sein, wo die Verfügbarkeit von Positionslösungen im Vordergrund
steht, nicht die Genauigkeit.
Abstract
The development of high-sensitivity (HS) GPS receivers has been driven by the US mandate
on location of cell phone users who place an emergency call, and by the increasing interest in
location based services. HS-GPS receivers increase the availability of position solutions in
environments with limited line-of-sight satellite visibility and may allow positioning even
indoors. They are now commonly used within the latest cell phones, car navigation systems
and other consumer products but have not entered technical areas with stringent accuracy re-
quirements. The paper highlights the reasons. The basic concept of HS-GPS is reviewed, ex-
amples of applications are given, and the limitations are discussed. It is shown that HS-GPS is
primarily useful for applications which require position availability rather than accuracy.
Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
1 Einleitung
GPS Satelliten strahlen den C/A-Code mit einer Leistung von 27 W ab. Beim Empfang auf
der Erdoberfläche beträgt die Signalleistung nur noch etwa 10–16 W bzw. −160 dBW.1 Der
enorme Verlust resultiert hauptsächlich aus der sogenannten Freiraumdämpfung, also der Ab-
nahme der Leistungsdichte mit dem Quadrat der Entfernung. Eine ausführliche Diskussion
des Leistungsbudgets und Angaben zu den anderen GPS Signalen findet man z.B. in [18] und
[10, S.183ff].
Die praktische Erfahrung mit konventionellen GPS Empfängern verleitet zur Annahme, dass
Gebäude und andere Objekte die Signale blockieren ("abschatten") und dass GPS Empfänger
deshalb im Schatten solcher Objekte — oder in ihrem Inneren — nicht einsetzbar sind. Tat-
sächlich breiten sich elektromagnetische Wellen aber nicht nur entlang der direkten Sichtver-
bindung aus, sondern auch indirekt durch Reflexion, Beugung und Streuung, siehe z.B. [14].
Darüber hinaus können elektromagnetische Wellen Hindernisse sogar durchdringen. Dabei
werden sie jedoch je nach Materialeigenschaften, Dicke des Hindernisses, Wellenlänge und
Auftreffwinkel abgeschwächt, [8]. GPS Signale existieren also auch in abgeschatteten Berei-
chen, wie in Innenräumen, im Inneren von Fahrzeugen, oder unter dichter Beschirmung im
Wald. Sie sind dort jedoch normalerweise so schwach, dass ein konventioneller GPS Emp-
fänger sie weder erfassen noch verfolgen kann.
Die Signalstärke in abgeschatteten Bereichen resultiert aus der Überlagerung reflektierter,
gebeugter und transmittierter Wellen. Sie hängt von vielen nur nährungsweise bekannten Pa-
rametern ab und ist in der Regel zeitlich und räumlich stark variabel. Daher kann man die
Signalstärke nicht deterministisch vorhersagen; eine Abschätzung auf Basis stochastischer
Modelle ist jedoch möglich. Eine hilfreiche Einführung findet man in [14], konkrete Anwen-
dungsbeispiele für GPS z.B. in [9] und [7].
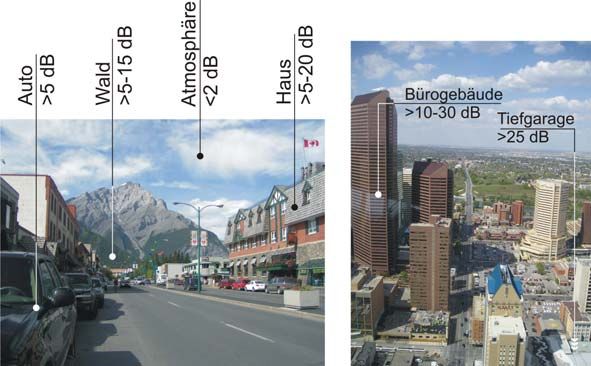
Abb. 1 zeigt typische Größenordnungen der Dämpfung von GPS Signalen (C/A-Code) in un-
terschiedlicher Umgebung bzw. durch unterschiedliche Hindernisse. Die Werte stammen
größtenteils aus experimentellen Untersuchungen des Autors, entsprechen aber auch den mitt-
leren Dämpfungswerten die für verschiedenste Materialien und Umgebungen in der Literatur
angeführt sind, [14], [2]. Konventionelle GPS Empfänger sind so ausgelegt, dass sie Signale
bis zu einer Stärke von etwa –170 dBW nutzen können. Solche Empfänger sind in stark abge-
schatteten Bereichen nicht mehr einsetzbar, wo die Dämpfung 10 dB häufig übersteigt.2
Marktbedürfnisse (z.B. "Location based services") und gesetzliche Rahmenbedingungen in
den USA (E911 Mandat, [3], [4]) haben in den vergangenen Jahren die Entwicklung von GPS
Empfängern angetrieben, die auch im Wald, in stark verbautem Gebiet und sogar im Inneren
von Gebäuden funktionieren. Die prinzipielle Machbarkeit wurde 1997 von Peterson et al.
1
Leistungsverhältnisse werden häufig logarithmisch angegeben, weil damit unterschiedlichste Größenordnungen bequem
gehandhabt werden können. Mit der Beziehung RdB=10⋅log (P1/P2) kann das Verhältnis von P1 zu P2 in Dezibel (dB) ausge-
drückt werden. Leistungen selbst können ebenfalls in dB angegeben werden, wenn man sie als Verhältnis zu 1 W oder zu
1 mW auffasst. Dies wird durch die Dimensionen dBW oder dBm gekennzeichnet. −160 dBW entspricht daher 10−16 W bzw.
10−13 mW und −130 dBm.
2
–170 dBW = –160 dBW –10 dB; aufgrund der logarithmischen Skala sind Dämpfungen, ausgedrückt in dB, additiv.Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
experimentell nachgewiesen, [13]: mit einem Versuchsaufbau gelang es, GPS Pseudostrecken
in einer Umgebung zu messen, wo die Signalleistung um 60 dB (d.h., um einen Faktor 106!)
schwächer war als bei direkter Sichtverbindung zu den GPS Satelliten. Inzwischen werden
von fast allen namhaften Herstellern massenmarkttauglicher Einfrequenzempfänger auch
hoch sensible GPS Empfänger, sogenannte high-sensitivity (HS) Empfänger, angeboten, die
Signale mit einer Leistung von ≤–180 dBW erfassen können.
In diesem Beitrag wird zunächst skizziert, wie sich die Empfindlichkeit eines GPS Empfän-
gers steigern lässt (Abschnitt 2). Diese Steigerung kann zu einer höheren Anzahl verfügbarer
Satelliten-Beobachtungen führen; die zusätzlich gewonnenen Beobachtungen sind jedoch
üblicherweise weniger genau als die Beobachtungen zu Satelliten mit direkter Sichtverbin-
dung. In Abschnitt 3 wird die erreichbare Genauigkeit von HS-GPS unter diesem Aspekt dis-
kutiert. Daraus ergeben sich dann Limitierungen für gegenwärtige und absehbare Anwen-
dungsfelder, die in Abschnitt 4 exemplarisch vorgestellt werden.
Abb. 1: Typische Dämpfung von GPS Signalen durch unterschiedliche Hindernisse im direk-
ten Signalweg.
2 Vom konventionellen zum hoch-sensitiven GPS
Empfänger
2.1 Signal-Rausch-Verhältnis
Es mag zunächst naheliegend scheinen, in den Empfänger einen besseren Signalverstärker
einzubauen, um auch die Signale abgeschatteter Satelliten nutzbar zu machen. Die kritische
Größe ist jedoch nicht primär die Signalleistung pS, sondern das Signal-Rausch-Verhältnis
pS
SNR := 10 ⋅ log10 . (1)
pN
Dieses wird durch einen Verstärker nicht verbessert. Im Fall von GPS resultiert die Rausch-
leistung pN zum überwiegenden Teil aus dem thermischen Rauschen, welches im Antennen-
Empfänger-System selbst entsteht, siehe [10]. Die Energie des thermischen Rauschens ist
gleichmäßig über alle Frequenzen verteilt (weißes Rauschen). Damit ergibt sich die Rausch-Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
leistung aus dem Produkt der sogenannten Rauschdichte n0 (in W/Hz) und der Bandbreite b
(in Hz) des Systems:
pN = n0 ⋅ b . (2)
Setzt man Gl. (2) in Gl. (1) ein und drückt alle beteiligten Größen logarithmisch aus, dann
kann man das Signal-Rausch-Verhältnis auch wie folgt schreiben:
SNR = PS − N 0 − B := C/N 0 − B , (3)
worin PS, N0 und B die Signalstärke (in dBW), die Rauschdichte (in dBW/Hz) und die Band-
breite in (dBHz) sind, und die ersten beiden Terme zum Signal-Rauschdichte-Verhältnis C/N0
(carrier-to-noise-density ratio) zusammengefasst werden. Der C/N0-Wert kann im Empfänger
praktisch nicht beeinflusst werden3 und ist ein direktes Maß für die Signalstärke, weil der
Anteil N0 durch Antenne und Vorverstärker weitgehend vorgegeben ist. Für eine typische
Antennen-Empfänger-Kombination beträgt die Rauschdichte ca. –201 dBW/Hz und das C/N0
eines ungestörten C/A-Code Signals damit ca. 41 dBHz , [10], [22].
2.2 Signalerfassung und -verfolgung
Die Bandbreite B — und damit das Signal-Rausch-Verhältnis SNR — hängt von der Abtast-
rate und den eingesetzten Filtern ab. Die Bandbreite ist an verschiedenen Punkten im Anten-
nen-Empfänger-System unterschiedlich groß. Aufgrund der C/A-Code Chiprate von 1.023
MHz muss die Digitalisierung des empfangenen GPS Signals mit mehr als 2.046 MHz erfol-
gen, und die Bandbreite der vorgeschalteten Filter zur Rauschunterdrückung muss diesen
Wert ebenfalls übersteigen, daher gilt zunächst
b > 2.046 ×106 Hz ⇒ B > 63dBHz , (4)
weil die Bandbreite der Abtastrate gleichgesetzt werden kann. Für ein typisches, nicht zusätz-
lich abgeschwächtes GPS Signal mit C/N0 = 41 dBHz folgt:
SNR < 41 − 63dB = −22 dB . (5)
Das Rauschen (Varianz) ist nach der Digitalisierung also um einen Faktor 100 stärker als das
Signal. Zur Messung kann das Signal jedoch nur genutzt werden, wenn SNR > 0. Um das zu
erreichen muss nach Gl. (3) die Bandbreite verringert werden. Rein rechnerisch scheint das
durch die Wahl einer geringeren Abtastrate erreichbar. Praktisch führt das nicht zum Ziel,
weil das Signal dann gemäß dem Abtasttheorem nicht mehr (eindeutig) aus den digitalisierten
Werten rekonstruierbar ist, [11].
Die Lösung besteht in der Berechnung der Kreuzkorrelationsfunktion aus empfangenem Sig-
nal x(t) (inklusive Rauschen) und im Empfänger erzeugter Signalkopie y(t) (replica code).
Der Wert der Kreuzkorrelationsfunktion wird aus n aufeinanderfolgenden abgetasteten Wer-
ten xi und yi wie folgt geschätzt:
3
Die Bestimmung dieses Wertes erfolgt im Empfänger durch Schätzverfahren und auf Basis von Annahmen. Unterschiedli-
che Empfänger können daher selbst bei Verwendung identischer Antennen und Signale verschiedene C/N0-Werte anzeigen.Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
1 n
Rˆ xy[ n ] (τ ) := ∑ xi ⋅ yi + k , (6)
n i =1
mit
xi := x(ti ), yi := y (ti ), τ = k ⋅ Δts , Δts = ti +1 − ti = const., k ∈ Z . (7)
Die Pseudostrecke ergibt sich dann aus der Lichtgeschwindigkeit und jenem Zeitversatz τ, für
den die Kreuzkorrelationsfunktion maximal wird. Der interessierte Leser wird für eine umfas-
sende Darstellung von Signalerfassung, Signalverfolgung und Bestimmung der Pseudostre-
cken auf [18] und [16] verwiesen; eine Zusammenfassung des Prozesses in deutscher Sprache
wurde z.B. in [22] gegeben.
Die Schätzung der Kreuzkorrelation nach Gl. (6) wird in der GPS Literatur als "Integration"
bezeichnet und entspricht im Prinzip einer Mittelung über n Messwerte. Das Rauschen (Vari-
anz) geht bei einer solchen Mittelung um den Faktor 1/n zurück, während die Signalleistung
unverändert bleibt. Damit bewirkt die Integration über Tint=n×Δts Sekunden also eine Verbes-
serung des Signal-Rausch-Verhältnisses um 10⋅log10 n dB (und entspricht einer Reduktion der
Bandbreite um 10⋅log10 n dB). Je länger integriert wird, umso größer wird das SNR. Konkret
lässt sich aus Gl. (3) das SNR nach der Integration wir folgt berechnen:
SNR = C/N 0 − Bs + 10 ⋅ log10 n , (8)
wobei die Bandbreite des abgetasteten Signals mit Bs bezeichnet wurde. Aus Gründen der
Einfachheit sind Implementierungsverluste in dieser Arbeit nicht berücksichtigt. Im realen
GPS Empfänger treten bei der praktischen Umsetzung des Prinzips aus Gl. (6) noch Verluste
von einigen dB auf, die von Details der Implementierung abhängen und in Gl. (8) bzw. (10)
als konstanter, additiver Term berücksichtigt werden könnten.
Aus Gl. (8) erhält man wegen
Tint
n= = f s ⋅ Tint ⇒ 10 ⋅ log10 n = Bs + 10 ⋅ log10 Tint , (9)
Δts
die einfachere Beziehung
SNR = C/N 0 + 10 ⋅ log10 Tint , (10)
das SNR hängt also nur vom C/N0 und der Integrationsdauer ab.
Die zuverlässige Bestimmung der Pseudostrecken erfordert, dass das Signal deutlich stärker
als das Rauschen ist; als Richtwert dafür kann SNR > 10 dB angenommen werden, was einem
Verhältnis 10:1 von Signalleistung zu Varianz — und damit etwa einem Verhältnis 3:1 von
Signalamplitude zu Standardabweichung — entspricht. Mit Hilfe von Gl. (10) kann man die
minimale Integrationsdauer als Funktion der Signalstärke abschätzen. Dieser Zusammenhang
ist in Abb. 2 veranschaulicht.Reprint Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293. Abb. 2: Nach Gl. (10) abgeschätzte minimal erforderliche Integrationsdauer für SNR≥10 dB. Für die oben erwähnte typische Signalstärke von 41 dBHz ist demnach eine Integration über etwa 1 ms erforderlich. Die Abbildung suggeriert, dass sich die Sensitivität des Empfängers durch längere Integration nahezu beliebig steigern lässt. In Innenräumen können GPS Signale um mehr als 30 dB gedämpft sein; nach Abb. 2 scheinen selbst solche Signale noch erfassbar, wenn die Integrationszeit 1 s oder mehr beträgt. Allerdings kann man die Zeitdauer der sogenannten kohärenten Integration, mit der der Wert der Kreuzkorrelation gemäß Gl. (6) geschätzt wird, nicht beliebig ausdehnen. Die Ursache liegt in der unbekannten exakten Trägerfrequenz des empfangenen Codes (aufgrund der Rela- tivbewegung zwischen Empfänger und Satellit kommt es zu einer zeitlich veränderlichen Dopplerverschiebung von bis zu ±4.5 kHz) und in den Navigationsdaten, die dem C/A-Code mit einer Bit-Rate von 50 Hz aufmodulierten sind. Beide Effekte bewirken letztlich einen Vorzeichenwechsel im digitalisierten Signal x(t), der im replizierten Code y(t) nicht enthalten ist. Bei der Integration über einen solchen Vorzeichenwechsel hinweg kommt es mit zuneh- mender Integrationsdauer zu einer Auslöschung des Signalanteils und damit zu einer Reduk- tion anstatt zu einer Steigerung des SNR. Um diesen Effekt zu vermeiden, beträgt die Integra- tionsdauer bei einem konventionellen GPS Empfänger typischerweise nicht mehr als 5 ms, und Signale mit einem C/N0 unter 33 dBHz können gemäß Abb. 2 nicht mehr erfasst werden. Für Details wird auf [18], [10] und [22] verwiesen. 2.3 Sensitivitätssteigerung Trotz der oben angeführten Schwierigkeiten liegt der Schlüssel zu HS-GPS in einer Verlänge- rung der Integrationszeit. Dies wird insbesondere durch eine sogenannte nicht-kohärente In- tegration ermöglicht, bei der die Ergebnisse mehrerer aufeinanderfolgender kohärenter Integ- rationen zunächst quadriert und dann aufsummiert werden. Dadurch kann der Einfluss von Vorzeichenwechseln im modulierten Signal reduziert und die Integration über die Grenzen der Datenbits hinweg durchgeführt werden. Der Preis dafür ist ein einmaliger Quadrierverlust
Reprint Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293. (Verringerung des SNR), der umso stärker ausfällt, je geringer das Signal-Rausch-Verhältnis vor dem Quadrieren ist. Der Zusammenhang zwischen C/N0 und erforderlicher Integrationszeit aus Abb. 2 gilt nur für starke Signale (die allein mit kohärenter Integration erfasst werden können). Abb. 3 zeigt den Zusammenhang unter Berücksichtigung des Quadrierverlustes und gilt auch für schwache Signale. Die erforderliche Integrationszeit hängt nicht nur vom C/N0 sondern auch von der Dauer Tcoh der kohärenten Integration ab, die ja das SNR vor dem Quadrieren mitbestimmt. Die Treppenform der Kurven in Abb. 3 entsteht, weil die gesamte Integrationszeit Tint nur ein ganzzahliges Vielfaches von Tcoh sein kann. Wie zuvor, sind auch hier Implementierungsver- luste (von typischerweise 2–10 dB) nicht berücksichtigt. Abb. 3: Theoretisch erforderliche Integrationsdauer für SNR≥10 dB unter Verwendung nicht- kohärenter Integration (Quadrierverlust berücksichtigt, Implementierungsverluste vernachläs- sigt). Leider ist die Integrationszeit auch mit nicht-kohärenter Integration auf etwa 1 s beschränkt. Die Hauptgründe dafür liegen in der Instabilität des Empfängeroszillators und in der Bewe- gung von Empfänger bzw. Antenne relativ zur Erdoberfläche. Dadurch ändert sich die Fre- quenz des empfangenen Signals während der Integration in nicht prädizierbarer Weise, was den SNR-Gewinn mit zunehmender Integrationsdauer wieder auslöscht, [1]. Daher ist für die Erfassung von Signalen in stark abgeschatteten Bereichen oder in Innenräumen (C/N0 < 20 dBHz) auch eine Ausdehnung der kohärenten Integration über die oben angeführ- ten 5 ms hinaus nötig, siehe Abb. 3. Tatsächlich gelingt das, wenn dem Empfänger Informati- on über die Datenbits der Navigationsnachricht sowie den Frequenzfehler des Empfängeros- zillators zur Verfügung gestellt wird (aiding). Das kann mit Hilfe entsprechender Dienste über eine Telekommunikationsverbindung (z.B. GSM) erfolgen — man spricht dann von as- sisted GPS (A-GPS), siehe z.B. [23] —, oder über kürzere Zeiträume auch durch Prädiktion- salgorithmen im Empfänger selbst (z.B. beim Übergang von abschattungsfreier Umgebung in abgeschattete Bereiche, oder bei einem Warmstart).
Reprint Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293. Schließlich ergeben sich bei der technischen Umsetzung noch beträchtliche Probleme durch den Rechenaufwand, insbesondere während der Signal-Akquisition. Da sich der Trägerfre- quenzunterschied δfD zwischen empfangenem und repliziertem Signal auf den geschätzten Wert der Kreuzkorrelation auswirkt, muss der Empfänger nämlich die Integration für hinrei- chend viele Werte von τ und δfD durchführen, um das Maximum der Kreuzkorrelation zu finden. Damit die Signalakquisitionszeit trotzdem im Bereich weniger Sekunden (oder darun- ter) bleiben kann, ist massive Parallelrechnung oder der Einsatz von Fourier-Transformations- Algorithmen erforderlich. Für weitere technische Details und Referenzen wird auf [19], [17], [2] und [22] verwiesen. Kommerziell erhältliche HS-GPS Empfänger können Pseudostrecken bis zu einem C/N0 von ca. 12 dBHz noch verfolgen und sind damit um ca. 20 dB sensitiver als konventionelle Emp- fänger. Allerdings können derzeitige HS-GPS Empfänger bei Signalstärken unter ca. 27 dBHz keinen Kaltstart (keine Vorinformation über Uhrfehler, Position und Satellitenverteilung) mehr durchführen, weil die Navigationsdaten bei so schwachen Signalen nicht demoduliert und die Pseudostrecken nicht vollständig bestimmt werden können. Für einen längeren Be- trieb in stark abgeschatteten Bereichen benötigen HS-GPS Empfänger daher externe Zusatz- informationen (A-GPS). Eine Verbesserung der Kaltstart-Fähigkeit ist durch neue Aquisitions- und Demodulations- Algorithmen auf Basis erweiterter Kalman Filter und sogenannter Viterbi-Algorithmen ab- sehbar, siehe [24]. Eine Verbesserung der Tracking-Fähigkeit zeichnet sich nicht ab, obwohl sie durch tiefe Integration von Inertialsensoren sowie die Verwendung besserer Oszillatoren theoretisch möglich wäre. Die Ursache liegt in den damit verbundenen Kosten, die für die Ziel-Märkte von HS-GPS (s. Abschnitt 4) noch zu hoch sind. Für Spezialanwendungen könn- te der in [12] vorgestellte Ansatz nützlich sein, bei dem die Signalintegration und Ableitung der Messgrößen erst im Post-Processing erfolgt; allerdings fallen dabei gewaltige Datenmen- gen an, die zunächst gespeichert werden müssen (4 MB/s, wenn die Abtastfrequenz 16 MHz beträgt und mit einer Auflösung von 2 Bit digitalisiert wird). Applikationen, welche die Trägerphasenmessungen benötigen, können von HS-GPS kaum profitieren. Selbst wenn es durch neue Algorithmen (wie in [24]) in Zukunft gelingen sollte, Trägerphasenmessungen auch unter 27 dBHz durchzuführen, werden diese Messungen mit häufigen Cycle-Slips kontaminiert sein und wegen des Signalempfangs über Beugung und Reflexion (statt entlang der direkten Sichtverbindung) große systematische Fehler aufweisen. 3 Erreichbare Genauigkeit 3.1 Präzision der Messungen Die Präzision der rohen Messwerte (Pseudostrecke, Trägerphase, Dopplerfrequenz) im Emp- fänger hängt insbesondere vom Signal-Rauschverhältnis ab. Die ausführliche Darstellung in [18] zeigt, dass mit abnehmendem C/N0 die Standardabweichung der Tracking-Loop-Ausgabe steigt. Man muss daher erwarten, dass die schwachen Signale, die ein HS-GPS Empfänger erfasst, weniger präzise Messwerte liefern, als jene Signale, die auch ein konventioneller GPS Empfänger nutzt.
Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
3.2 Externe Effekte
Bei terrestrischen GPS Anwendungen geht die Signalabschwächung in der Regel nicht nur
mit geringerer Präzision einher, sondern auch mit starken systematischen Abweichungen und
damit geringerer Genauigkeit. Dies wird in Abb. 4 an einem Beispiel veranschaulicht. Die
zugrundeliegenden Messdaten wurden mit einem u-blox TIM-LH GPS Empfänger im Februar
2006 am Dach eines TU Gebäudes in Graz aufgezeichnet. Die GPS low-cost Antenne befand
sich am Boden ("Station A"), in unmittelbarer Nähe der Wand eines Dachaufbaus, siehe Abb.
5.
In der stereographischen Darstellung (Abb. 4a) sind für jede volle Sekunde zwischen 10:00
und 14:00 Azimut und Elevation der Satelliten dargestellt, von denen der Empfänger eine
Pseudostreckenmessung ausgeben konnte. Die Farbcodierung der Punkte zeigt die Signalstär-
ke. Die graue Fläche kennzeichnet den durch Aufbauten abgeschatteten Bereich. Wie erwar-
tet, sind die erfassten Signale in diesen Bereichen deutlich schwächer als im abschattungsfrei-
en Sektor. Das sogenannte Gain-Pattern der Antenne verursacht auch im abschattungsfreien
Bereich eine Abnahme des C/N0 Wertes mit abnehmender Elevation.
Die Koordinaten der Antennenposition waren durch lokale Einmessung mittels Totalstation
von Messpfeilern am selben Dach mit einer Genauigkeit von wenigen Zentimetern bestimmt
worden. Diese Koordinaten konnten nun für eine Analyse der Pseudostreckenmessungen als
wahre Koordinaten betrachtet und in einer Ausgleichung festgehalten werden, mit deren Hilfe
der Empfängeruhrfehler geschätzt wurde. Die Residuen dieser Auswertung entsprechen (bis
auf das Vorzeichen) weitgehend den Abweichungen der Pseudostreckenmessungen von ihren
wahren Werten, siehe Abb. 4b. Diese Abweichungen beinhalten neben dem Rauschen aus der
Tracking-Loop auch externe Effekte wie nicht-modellierte Anteile der troposphärischen und
ionosophärischen Laufzeitverzögerung, oder Mehrwege- und Beugungseffekte.
Abb. 4: (a) Satellitenverteilung und C/N0 auf Station A, (b) Abweichung der gemessenen
Pseudostrecken von den Referenzwerten (siehe Text; ublox TIM-LH Empfänger, C/A Code).Reprint Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293. Abb. 5: Station A mit Umgebung. Mit HS-GPS Empfängern können Signale von Satelliten genutzt werden, die vom Empfänger aus gar nicht mehr direkt sichtbar sind, wie hier etwa von PRN 8, 27 und 28. Solche Signale gelangen in der Regel ausschließlich über indirekte Wege zum Empfänger und die entspre- chenden Messungen sind daher systematisch zu lang (positiver Bias). Dieser Bias bewirkt unweigerlich einen entsprechenden systematischen Fehler der geschätzten Empfängerpositi- on. Er lässt sich weder durch längere Beobachtungszeit auf einer Station noch durch mehr- weg-resistentere Tracking-Loops reduzieren. Abhilfe könnte nur durch Qualitätskontrolle (Ausreißerdetektion) und Modellanpassung im Rahmen der Datenauswertung erfolgen, was aber ausreichende Redundanz oder Integration zusätzlicher Sensoren voraussetzt und letztlich zu einer Eliminierung der mittels HS-GPS (mühsam) gewonnenen zusätzlichen Beobachtun- gen führen würde. Folglich kann HS-GPS zwar helfen, Position, Geschwindigkeit und Zeit an Orten zu bestim- men, wo das mittels konventioneller Empfänger aufgrund der Abschattungsbedingungen nicht möglich ist (z.B. in Innenräumen), die dabei erzielbare Genauigkeit ist jedoch wesentlich ge- ringer als mit konventionellem GPS in abschattungsarmer Umgebung. Dies wurde in [20] ausführlich diskutiert. Die erzielbare Genauigkeit der Positionierung mittels HS-GPS lässt sich nicht pauschal ange- ben. Eine Größenordnung kann jedoch mit Hilfe der Abb. 6 abgeschätzt werden. Diese Abbil- dung zeigt die Verteilung der Pseudostreckenabweichungen aus dem obigen Beispiel, ge- trennt für die direkt sichtbaren Satelliten (LOS) und die abgeschatteten Satelliten. Während nur 5% der LOS Beobachtungen Abweichungen von mehr als 4m haben, weisen 50% der abgeschatteten Beobachtungen größere Fehler auf; 5% der abgeschatteten Beobachtungen haben sogar Abweichungen von mehr als 70m. In anderen Datensätzen wurden teilweise noch größere Abweichungen festgestellt (>1 km), die durch sogenannte Kreuzkorrelationseffekte auftreten können wenn das direkte Signal nicht stark genug ist. Nicht selten weisen Positions- lösungen, die unter Verwendung stark abgeschwächter Signale gewonnen werden, systemati- sche Abweichungen mit Größenordnungen von 10–100 m, oder mehr, auf.
Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
Abb. 6: Empirische Verteilung der Pseudostreckenabweichungen aus Abb. 4b.
3.3 Varianzmodell
Wegen der stark unterschiedlichen Genauigkeit der Beobachtungen kommt der Modellierung
der Varianzen bei HS-GPS besondere Bedeutung zu, siehe [21]. Ohne realistische Varianz-
modellierung können Ausreißer (wie z.B. km-Abweichungen) nicht zuverlässig detektiert
werden. Weiters sind in diesem Fall die geschätzten Parameter suboptimal und ihre berechne-
ten Standardabweichungen falsch.
Das in anderem Zusammenhang eingeführte SIGMA-ε Varianzmodell [6] eignet sich beson-
ders gut für die Auswertung von HS-GPS Daten, [21]. Mit diesem Modell können die Varian-
zen der undifferenzierten Beobachtung aus den vom Empfänger gemessenen und ausgegebe-
nen C/N0-Werten sowie einem empirisch bestimmbaren Koeffizienten C berechnet werden:
C/N0,i
−
σ i2 = C ⋅10 10
. (11)
Für die weitere Auswertung darf dann angenommen werden, dass die Beobachtungsabwei-
chungen unkorreliert und normalverteilt sind, mit Erwartungswert 0 und (jeweils unterschied-
licher) Varianz σi2. Wie in [21] gezeigt wurde, repräsentiert dieses Modell in abschattungsar-
mer Umgebung typischerweise mehr als 99% der Beobachtungen, und selbst in stark abge-
schatteten Bereichen wie z.B. in engen Straßenschluchten noch 80–90%. Die restlichen Beo-
bachtungen müssen im Rahmen der Qualitätskontrolle als Ausreißer erkannt und eliminiert
oder ausreichend abgewichtet werden.
3.4 Experimentelles Beispiel
Abb. 7 zeigt exemplarische Resultate aus dem angeführten Experiment. Ein konventioneller
GPS Empfänger (Ashtech G12) und ein HS-GPS Empfänger (u-blox TIM-LH) waren mittels
Signalsplitter zugleich an dieselbe Antenne in Station A (s. Abb. 5) angeschlossen. Die Zeit-
reihen zeigen die Abweichungen der geschätzten Ostkoordinaten vom bekannten Wert für
unterschiedliche Berechnungsvarianten. Epochen, zu denen die interne QualitätskontrolleReprint Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293. nicht möglich (weniger als 5 Beobachtungen) oder nicht erfolgreich war (Modelltest negativ, Ausreißer nicht identifizierbar oder nach Modelladaption zu wenige Beobachtungen übrig), sind nicht dargestellt. Nord- und Höhenkomponenten liefern ein ähnliches Bild, werden hier aber nicht präsentiert. Abb. 7: Zeitreihen der geschätzten Koordinaten (Ostkomponente, C/A-Code) für Epochen mit ≥5 Beobachtungen und erfolgreichem globalen Modelltest: (a) konventioneller Empfän- ger (Beobachtungen gleich gewichtet), (b) HS-GPS Empfänger (Beobachtungen gleich ge- wichtet), (c) HS-GPS Empfänger mit SIGMA-ε Varianzmodell, (d) HS-GPS Empfänger mit SIGMA-ε Varianzmodell, nur ausgewählte Beobachtungen verwendet (siehe Text); ausge- wiesene Standardabweichung bezieht sich nur auf markierten Bereich (ab 13:00). Die Pseudostreckenmessungen des konventionellen Empfängers liefern Koordinaten mit ho- her Präzision und Genauigkeit (Abb. 7a, RMS über gesamte Zeitreihe: 3.7 m, maximale Ab- weichung 9 m). Aufgrund der starken Abschattungen liefert dieser Empfänger in der vorlie- genden Umgebung jedoch zu wenige Beobachtungen, und eine kontrollierte Lösung steht während 50% der Zeit nicht zur Verfügung. Der HS-GPS Empfänger liefert fast über die gesamte Zeitdauer (98.5%) eine kontrollierte Lösung, allerdings mit erheblich reduzierter Präzision und Genauigkeit, wenn in der Auswer- tung gleiche Varianz aller Beobachtungen angenommen wird (Abb. 7b); der RMS Wert be- trägt dann 15 m, 10% der Abweichungen sind größer als 28 m. Die Verwendung des SIGMA- ε Varianzmodells in der Auswertung verbessert Präzision und Genauigkeit der Lösung signi- fikant: der RMS Wert beträgt 7.8 m, 90% der Abweichungen sind kleiner als 13 m (Abb. 7c). Prinzipiell sollten zusätzliche Beobachtungen das Ergebnis nicht verschlechtern, wenn die Beobachtungen untereinander richtig gewichtet sind und die Qualitätskontrolle im Rahmen der Auswertung funktioniert. Abb. 7a–c scheint jedoch eine solche Verschlechterung durch zusätzliche Beobachtungen anzuzeigen, wie z.B. die ausgewiesenen Standardabweichungen
Reprint Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293. für den letzten Abschnitt zeigen, während dessen schon der konventionelle Empfänger ausrei- chend viele Beobachtungen zur Verfügung stellt. Man muss jedoch zusätzlich in Betracht ziehen, dass der konventionelle Empfänger (Abb. 7a) und der HS-GPS Empfänger (Abb. 7b– c) sich nicht nur in der HS Funktionalität und damit der Anzahl der ausgegebenen Beobach- tungen unterscheiden, sondern dass es sich um gänzlich unterschiedliche Empfänger handelt. Damit weisen auch die Beobachtungen der von beiden Empfängern erfassten Satelliten unter- schiedliche Präzision und möglicherweise unterschiedliche Verzerrung durch Mehrwegeef- fekte auf. Zur Vervollständigung des Bildes wurde in Abb. 7d noch das Ergebnis einer Be- rechnungsvariante dargestellt, bei der nur die Beobachtungen des HS-GPS Empfängers Ver- wendung fanden, welche auch beim konventionellen Empfänger verfügbar sind. Diese Selek- tion von Beobachtungen simuliert ein Wegfallen der HS Funktionalität beim u-blox Empfän- ger. Im vorliegenden Fall weisen die Messwerte des u-blox HS-GPS Empfängers eine gerin- gere Präzision auf als jene des G12 Empfängers, weshalb auch die Präzision der Koordinaten- lösungen geringer ist (vgl. Abb. 7a und d). 4 Anwendungsmöglichkeiten HS-GPS Empfänger wurden aufgrund massiver Nachfrage aus Anwendungsbereichen mit geringen Genauigkeitsanforderungen entwickelt, insbesondere für die möglichst ubiquitäre Ortung von Mobiltelefonbenutzern, die eine Notrufnummer wählen. Für solche Applikationen können Positionierungsfehler von mehr als 100 m tolerierbar sein, das Hauptaugenmerk liegt auf der Verfügbarkeit von Positionslösungen auch in stark abgeschatteten Bereichen und in Innenräumen, sowie auf minimalen Kosten. Wie oben gezeigt wurde, ist die Steigerung der Verfügbarkeit von Positionslösungen tech- nisch realisierbar. Sie geht jedoch nicht mit einer Steigerung der Genauigkeit einher. Viel- mehr sind jene Beobachtungen, die erst durch die HS Funktionalität eines Empfängers ver- fügbar werden, stärker verrauscht und häufig durch Ausbreitungseffekte stark verzerrt. Positi- onslösungen, die hauptsächlich auf schwachen Signalen beruhen, können daher um 1–2 Grö- ßenordnungen ungenauer sein als typische GPS Positionslösungen in abschattungsarmer Um- gebung. Ebenso helfen einzelne zusätzliche Beobachtungen eines HS-GPS Empfängers in der Regel nicht, die Genauigkeit einer bereits ohne diese Beobachtungen möglichen Positionslö- sung zu verbessern, weil sie bei falscher Gewichtung die Lösung verzerren und bei richtiger Gewichtung kaum etwas zur Lösung beitragen. Neben der Aufgabe, Mobiltelefonbenutzer zu lokalisieren (siehe [3],[4]), profitieren daher wohl ortsbezogene Dienste (location based services) am meisten von HS-GPS, wo die Infor- mation z.B. über naheliegende Sehenswürdigkeiten, Fahrpläne öffentlicher Verkehrsmittel oder lokales Verkehrsaufkommen selbst dann relevant sind, wenn die geschätzte Position um mehr als 100 m von der wahren Position abweicht. Auch Navigationssysteme für Landfahrzeuge werden zunehmend mit HS-GPS Empfängern ausgerüstet. In Streckenabschnitten mit häufig wechselnder Abschattungssituation, z.B. in bewaldeter Umgebung, oder auf Strecken mit zahlreichen Tunnels und Überführungen kön- nen solche Empfänger wesentlich zu einer Stabilisierung der Positionslösungen beitragen, weil sie die GPS Signale nicht so häufig verlieren und unmittelbar nach dem Verlassen der jeweiligen Abschattung wieder genaue Messwerte liefern können, während konventionelle Empfänger nach dem Austritt aus dem Signalschatten unter Umständen mehrere Sekunden
Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
benötigen, um die Signale wieder zu akquirieren. In Kombination mit gespeicherten Karten
und möglicherweise mit zusätzlichen Sensoren, können HS-GPS Empfänger das Navigations-
system auch besser gegen häufige Ausfälle in stark verbauten städtischen Bereichen rüsten.
In der Literatur finden sich zahlreiche weitere Applikationen auf Basis von Pseudostrecken-
beobachtungen, wo HS-GPS erfolgreich eingesetzt wird oder werden könnte. Beispiele rei-
chen von der näherungsweisen Ortung von Lawinenopfern (zum Eingrenzen des Suchbe-
reichs), [15], bis zur Verfolgung der Beute von Bankräubern, [5].
Für geodätische Anwendungen und insbesondere für Anwendungen, die die Auswertung der
Trägerphasen erfordern, sind HS-GPS Empfänger aus den bereits diskutierten Gründen kaum
geeignet. Eine Ausnahme stellt das Verfahren der GPS Okkultation dar, bei dem GPS Emp-
fänger in "tief-fliegenden" Satelliten verwendet werden, um Signale zu erfassen, die die Erd-
atmosphäre durchdringen und damit Information über die Atmosphäre liefern. Aufgrund der
großen Distanz zwischen GPS Satellit und Empfänger können die Signale bei dieser Anwen-
dung stark gedämpft sein, ohne jedoch durch indirekte Signalwege verzerrt zu sein. Hier kann
HS-GPS helfen, präzise Trägerphasenmessungen besonders schwacher Signale zu erhalten.
Eine nützliche technische Anwendung von HS-GPS Empfängern stellt schließlich noch ihre
Verwendung zur Zeitsynchronisierung dar, z.B. in Sensornetzwerken, weil eine Genauigkeit
von einigen Microsekunden selbst bei Beeinträchtigung durch indirekte Signalwege erreich-
bar ist.
Dank
Dieser Beitrag beruht auf einem Vortrag, den der Autor im Rahmen der Verleihung des "Karl-
Rinner-Preises" der Österreichischen Geodätischen Kommission im November 2006 gehalten
hat. Besonderer Dank gilt Herrn DI Michael Schmid, dem Sponsor des Preises, und der Öster-
reichischen Geodätischen Kommission. Weiters wird dankend erwähnt, dass Dr. Horst Har-
tinger und Dr. Raoul Schild HS-GPS Empfänger für die Testmessungen zur Verfügung ge-
stellt und die in diesem Beitrag angeführten Untersuchungen teilweise ermöglicht haben.
Literaturverzeichnis
[1] Chansarkar, M.M., Garin, L. (2000): Acquisition of GPS Signals at Very Low Signal to
Noise Ratio. In: Proc. ION NTM 2000, Anaheim, California, 26.–28. Jänner, 731–737
[2] Eisfeller, B., Teuber, A., Zucker, P. (2005): Untersuchung zum GPS-Satellitenempfang
in Gebäuden. AVN 4/2005: 137–145
[3] FCC (1996) Report and order and further notice of proposed rulemaking (FCC 96-264),
http://hraunfoss.fcc.gov/edocs_public/attachmatch/FCC-96-264A1.pdf
[4] FCC (2004) 911 Sevices. http://www.fcc.gov/911, Federal Communications Commis-
sion, 24.11.2004
[5] Fuller, R., Grimm, P. (2006): Tracking System for Locating Stolen Currency. In: Proc.
ION GNSS 2006, Fort Worth, Texas, 26.–29. September, 3094–3104
[6] Hartinger, H., Brunner, F.K. (1999): Variances of GPS Phase Observations: The
SIGMA-ε Model. GPS Solutions 2/4: 35–43Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
[7] Hu, T., Lachapelle, G., Klukas, R. (2007): Controlled GPS Signal Simulation for In-
doors. Journal of Navigation, 60: 265–280
[8] Jackson, J.D. (1998): Classical Electrodynamics. 3. Aufl., John Wiley & Sons, New
York
[9] Klukas, R., Lachapelle, G., Ma, C., Jee, G.-I. (2003): GPS signal fading model for ur-
ban centres. In: IEEE Proc.-Microw. Antennas Propag., Vol. 150, No. 4, August, 245–
252
[10] Misra, P., Enge, P. (2001): Global Positioning System—Signals, Measurement, and
Performance. Ganga-Jamuna Press, Lincoln, Massachusetts
[11] Oppenheim, A.V., Willsky, A.S. (1997): Signals and Systems. 2. Aufl., Prentice Hall,
Upper Saddle River, New Jersey, 957p
[12] Pany, Th. (2006): Nutzen des Post-Processings von aufgezeichneten GPS-
Zwischenfrequenzsignalen zur Positionierung bei Abschattungen und im Indoor-
Bereich. Vermessung & Geoinformation 94: 195–205
[13] Peterson B., Bruckner D., Heye S. (1997): Measuring GPS Signals Indoors. In: Proc.
ION GPS 1997, Kansas City, Kansas, 16.–19. September, 615–624
[14] Rappaport, T.S. (2002): Wireless Communications: Principles and Practice. 2. Aufl.,
Prentice Hall, Upper Saddle River, New Jersey
[15] Schleppe, J.B., Lachapelle, G. (2006): GPS Tracking Performance under Avalance De-
posited Snow. In: Proc. ION GNSS 2006, Fort Worth, Texas, 26.–29. September, 3105–
3116
[16] Van Dierendonck, A.J. (1996): GPS Receivers. In: Parkinson, B.W., Spilker, J.J. (eds)
Global Positioning System: Theory and Applications, vol 1, American Institute of Ae-
ronautics and Astronautics, Washington, DC, 329–407
[17] van Diggelen, F. (2002): Indoor GPS theory & implementation. In: Proc. IEEE Position,
Location, and Navigation Symposium, Palm Springs, California, 15.–18. April, 240–
247
[18] Ward, P.W., Betz, J.W., Hegarty, C.J. (2006) Satellite Signal Acquisition, Tracking, and
Data Demodulation. In: Kaplan, E.D., Hegarty, C.J. (Hrsg.) Understanding GPS: Prin-
ciples and Applications. 2nd ed, Artech House, Boston-London, 153–241
[19] Watson, J.R.A. (2005): High-Sensitivity GPS L1 Signal Analysis for Indoor Channel
Modelling. MSc thesis, University of Calgary, UCGE Report 20215,
http://www.geomatics.ucalgary.ca/links/GradTheses.html
[20] Wieser, A. (2006): High-Sensitivity GNSS: The trade-off between availability and ac-
curacy. In: Proc. 3rd IAG Sympoisum on Geotechnical and Structural Engineering, Ba-
den, Österreich, 22.–24. Mai, 12p
[21] Wieser, A., Hartinger, H., Gaggl, M. (2005): Improved positioning accuracy with high-
sensitivity GNSS receivers and SNR aided integrity monitoring of pseudo-range obser-
vations. In: Proc. ION GNSS 2005, Long Beach, California, 13.–16. September, 1545–
1554
[22] Wieser, A., Hartinger, H. (2006): High-sensitivity GPS: Technologie und Anwendun-
gen. In: DVW Schriftenreihe 49, 251–274Reprint
Öst. Z. f. Vermessung u. Geoinformation 95 (2007): 284 – 293.
[23] Wunderlich, Th.A., Preis, S., Su, C. (2006): Wireless Assisted GPS — Technische
Möglichkeiten und notwendige Infrastruktur. In: DVW Schriftenreihe 49, 241–250
[24] Ziedan, N.I. (2006): GNSS receivers for weak signals. Artech House, Boston - London,
234p
Anschrift des Autors
Dr. Andreas Wieser
Institut für Ingenieurgeodäsie und Messsysteme,
Technische Universität Graz
Steyrergasse 30
8010 Graz, Österreich
E-mail: andreas.wieser@tugraz.atSie können auch lesen