DIESER VORTRAG WURDE AM 18. NOVEMBER 2004 IM RAHMEN DES FACHFORUMS VOGIS GEHALTEN - AUF GRUND DER KOMPLEXITÄT DES VORTRAGS WIRD NICHT DIE ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Dieser Vortrag wurde am 18. November 2004 im Rahmen des
Fachforums VoGIS gehalten.
Auf Grund der Komplexität des Vortrags wird nicht die
Präsentation selbst, sondern der Inhalt in Textform in
Kombination mit den Bildern wiedergegeben.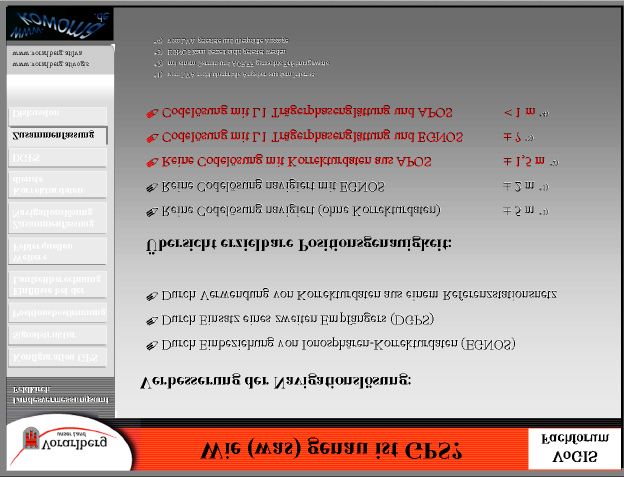
Vortrag vom 18.11.2004: „Wie (was) genau ist GPS?“
Inhaltsverzeichnis:
1. Einleitung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 2
• Wie genau ist GPS?
• Was genau ist GPS?
2. Konfiguration des GPS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 2
• Seit wann gibt es GPS?
• Konfiguration im Weltraum
• Was für Signale senden die Satelliten aus?
3. Positionsbestimmung über GPS. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 5
• Wie kann man diese Signale nun verwenden?
• Auswertung am Beispiel eines C/A Codes
4. Einflüsse und Fehlerquellen bei der Laufzeitberechnung . . . . . . . . . . . . Seite 7
• Uhrenfehler im Empfänger
• Uhrenfehler im Satelliten
• Verzögerungen der Signale durch die Atmosphäre:
• Was passiert in der Ionosphäre?
• Was passiert in der Neutrosphäre?
5. Andere Einflüsse und Fehlerquellen. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 9
• Mehrwegeffekte
• Satellitengeometrie
• Abschattungen
6. Erste Zusammenfassung. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 13
7. Verwendung von Korrekturdatendiensten bzw der Einsatz von
differentiellem GPS (DGPS) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 13
• Korrekturdatendienste WAAS und EGNOS
• DGPS – Differentielles GPS
• Referenzstationsnetz APOS
8. Zweite Zusammenfassung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Seite 15
Quellenangaben:
• Internet www.kowoma.de Copyright © Dr. Michael Wößner (mit freundlicher Genehmigung)
• Buch „Vermessung und Ortung mit Satelliten“ von Manfred Bauer, erschienen im Verlag
Wichmann, 1997
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 1
1. Einleitung:
Wie genau ist GPS?
Auf diese Frage bekommt der Interessierte so unterschiedliche Antworten, abhängig davon ob
er einen GPS-Geräte-Verkäufer oder einen Anwender fragt, dass er an der Glaubwürdigkeit
aller zweifeln wird. Obwohl weder die, die von Zentimeter-Genauigkeit gesprochen haben,
noch die, die von ± 50m ausgehen, übertrieben haben. Die Genauigkeit einer Position, die
über Satelliten bestimmt worden ist, hängt von so vielen Faktoren ab, dass wir nicht um die
Frage: „Was genau ist GPS?“ herumkommen.
Was genau ist GPS?
Wahrscheinlich weiß dies fast jeder ungefähr: Es schwirren ein paar Satelliten um die Erde,
die irgendwelche Signale aussenden und dann weiß unser Empfangsgerät, wo es ist. Und zeigt
seine Position in Koordinaten an. Dieses Wissen mag ausreichen, wenn man ein GPS-Gerät
zum Wandern oder Segeln nimmt. Sobald man es jedoch zum Erfassen von raumbezogenen
Daten verwenden will, oder sogar zur präzisen Vermessung, muss der Anwender genügend
Hintergrundinformation besitzen, um zu wissen, was er tut.
Deshalb beinhaltet dieser Vortrag einen breit angelegten theoretischen Teil unter dem Titel
„Was genau ist GPS?“. Es geht darum, einen Überblick über die Umstände zu schaffen, die
die GPS-Genauigkeiten beeinflussen, damit der Anwender ein Gefühl dafür bekommt, wo
GPS sinnvoll eingesetzt werden kann.
2. Konfiguration des GPS:
Seit wann gibt es GPS?
Wenn man von GPS spricht – übrigens die Abkürzung für Global Positioning System – meint
man das von den USA errichtete und betreute System. Es existieren nebenbei noch andere
Systeme, wie zB GLONASS, das russische Pendant, oder zukünftig hoffentlich Galileo
(geplante Inbetriebnahme 2008), das europäische Satellitenpositionierungssystem. Der
Einfachheit halber bleibe ich beim Ausdruck GPS.
In den 70er Jahren begann die Entwicklungsarbeit in den USA und
erste Systemtests mit Bodenstationen wurden durchgeführt. Zu
Beginn der 80er Jahre starteten die ersten Satelliten, die Kosten
waren enorm hoch, das Projekt drohte immer wieder an der
Finanzierung zu scheitern. Ursprünglich sollte das
Positionierungssystem ausschließlich dem Militär dienen, doch
viele zivile Nutzer bedienten sich der kostenlosen Signale. Die
USA befürchteten, dass auch andere Staaten das GPS für
militärische Zwecke verwenden könnten und verfälschten deshalb
die Satellitensignale. Dadurch konnten Positionen nur auf ± 100 m
genau bestimmt werden.
1994 wurde der letzte Satellit in seine Umlaufbahn gebracht und
das System erreichte damit seine volle Betriebsbereitschaft.
Im Jahr 2000 hat die USA die künstliche Verfälschung der Signale
eingestellt, die Positionierungsgenauigkeit stieg somit auf ± 15 m
an.
Bild von www.kowoma.de
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 2
Nachfolgend zwei Diagramme, die die Verbesserung der Positionsbestimmung nach der Abschaltung der
Signalverfälschung verdeutlichen. Die Kantenlänge der Diagramme beträgt jeweils 200 Meter, die Daten wurden
am 1. Mai 2000 bzw. am 3. Mai 2000 jeweils über 24 Stunden aufgenommen.
Während mit der Verfälschung 95 % der Messwerte innerhalb eines 45 m Radius liegen, sind nach Abschaltung
der Verfälschung 95 % der Werte innerhalb eines 6,3 m Radius.
Konfiguration im Weltraum:
Zuerst möchte ich auf die Konfiguration des Systems im Weltraum eingehen:
Es ist sinnlos, den Blick auf den Himmel zu richten, wie es oft Passanten tun, sobald sie
hören, dass man mit Hilfe von Satelliten vermisst.
Denn die Satelliten sind recht klein, haben mit ihren ausgeklappten Sonnensegeln eine
Spannweite von lediglich 5 Metern. Sie umkreisen die Erde in einer Entfernung von
20.200 km! Das ist ein gutes Stück weiter als von hier nach Australien! – Also, da kann man
wirklich nichts mehr erkennen.
Das System benötigt 24 Satelliten, um zu
garantieren, dass auf jedem Punkt der Erde
jederzeit Signale von mindestens 4
Satelliten empfangen werden können.
Warum es vier Satelliten sein müssen,
erkläre ich etwas später.
Die Satelliten befinden sich auf 6
Umlaufbahnen, deren Ebenen um 55° von
der Äquatorebene abweichen und um 60°
zueinander
versetzt sind. Vier
Satelliten teilen
sich je eine
Umlaufbahn.
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 3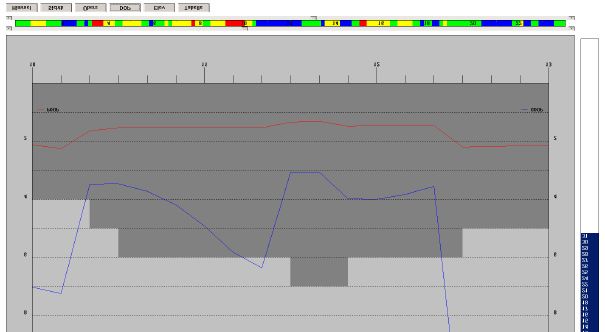
Die Satelliten sind sehr schnell unterwegs, sie umkreisen die Erde mit rund 12.000 km/h und brauchen für eine volle Umrundung 11 Stunden und 58 Minuten. (Dies entspricht einer Umlaufzeit von 12 Stunden Sternzeit). In der Erdenzeit fehlen jedoch 2 Minuten, was dazu führt, dass der gleiche Satellit am nächsten Tag etwa 4 Minuten früher über der gleichen Position steht. Diese Zeitverschiebung ist zu berücksichtigen, wenn eine GPS-Messung für einige Wochen in der Zukunft geplant wird – doch mehr dazu später. Die Satelliten sind mit bis zu drei Atomuhren (zumindest die neue Satellitengeneration) bestückt. Denn die exakte Zeitmessung spielt bei der GPS-Messung eine wesentliche Rolle. Die Uhren sind so präzis, dass ihre Ganggenauigkeit in einer Million Jahre ± 1 Sekunde beträgt. Noch etwas Erstaunliches: Die Sendeleistung der Satelliten liegt lediglich bei 50 Watt. Zum Vergleich strahlen die Fernsehsatelliten mit der doppelten Leistung, dennoch benötigt man eine halbmetergroße Parabolantenne, um einen guten Empfang zu haben. GPS-Antennen hingegen sind manchmal bloß wenige Zentimeter groß! Was für Signale senden die Satelliten aus? Extrem vereinfacht teilt jeder Satellit über ein Datensignal mit, wer er ist, wo er sich befindet und zu welcher Zeit er diese Mitteilung macht. Für diese Daten musste ein geeignetes „Transportmittel“ gefunden werden, eine sogenannte Trägerfrequenz. Es gab einige physikalische Vorgaben und Bedingungen (mit denen möchte ich Sie hier verschonen), die schlussendlich zur Wahl von zwei Trägerfrequenzen geführt haben: L1 – mit 1,5 Gigahertz und einer Wellenlänge von rund 20 cm und L2 – mit 1,2 Gigahertz und einer Wellenlänge von rund 25 cm Diese Signale liegen im elektromagnetischen Spektrum im Bereich der Mikrowellen. Das ist insofern für uns interessant, da sich Wellen, je näher sie sich im Spektrum beim sichtbaren Licht befinden, dessen Eigenschaften übernehmen. Lichtwellen können relativ einfach gestört werden: Das ergibt Schatten. Dasselbe gilt auch für GPS-Signale, die im „Schatten“ von Gebäuden, Bergen oder auch durch die Vegetation nicht empfangen werden können. Man spricht deshalb wortgetreu von „Abschattungen“. In unserem gebirgigen Land kann sich das fatal auswirken. Da sich auf unserem Breitengrad (47°) die meisten Satelliten am südlichen Himmel tummeln, ist zB in Brand im „Schatten“ der Schesaplana kaum eine GPS-Messung möglich. Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 4
Auch in städtischen oder sonstwie verbauten Gebieten gibt es massive Beeinträchtigungen. Waldgebiete stellen ebenfalls ein ernstzunehmendes Hindernis dar. Es ist deshalb unerlässlich, dass vor dem geplanten Einsatz von GPS das Messgebiet bekannt ist. Darauf komme ich im praktischen Teil am Ende des Vortrags nochmals zurück. Auf diese zwei Trägersignale L1 und L2 werden nun Daten aufmoduliert. Am bekanntesten ist der C/A code (coarse aquisition = grobe Bestimmung) auf L1, der von den Handheldgeräten zur Positionsbestimmung verwendet wird. Dieser Code ist ein pseudozufälliger Code (PRN – pseudo random code), der wie zufällig aussieht, jedoch für jeden Satelliten eindeutig festgelegt ist. Er wird mit 1,023 MHz übertragen und wiederholt sich jede Millisekunde. Bei einer Ausbreitungsgeschwindigkeit der Trägerwelle mit Lichtgeschwindigkeit ergibt das eine „Codelänge“ von rund 300 km. Um sich das soeben Gesagte besser vorstellen zu können hier ein Bild: Wenn sich der Code von 1 auf 0 ändert und umgekehrt, dann wird die Sinusschwingung des Trägersignals abgebrochen und mit einer Phasenverschiebung von 180° wieder aufgenommen. So folgen bei einem Phasenwechsel plötzlich Wellenberge oder Wellentäler aufeinander, die von einem geeigneten Empfänger erkannt und ausgewertet werden können. Bild von www.kowoma.de Es gibt dann auch noch eine P-Code (P für Präzis), der jedoch nur militärische Zecke genutzt werden kann, da er von der USA verschlüsselt wird. Zusätzlich zum C/A Code wird noch eine Navigationsnachricht in L1 hineinmoduliert. Die Nachricht beinhaltet allgemeine Informationen über den Zustand des Satelliten, ob er „gesund“ ist (oder zB gerade einer Bahnkorrektur unterworfen wird), über mögliche Uhrenfehler und Bahndaten. Darauf folgen die Almanachdaten (Infos über Bahnparameter aller Satelliten, deren technischer Zustand, usw). Die vollständige Übertragung dieser Navigationsnachricht benötigt 12,5 Minuten. Wenn ein Gerät lange Zeit ausgeschaltet war oder sich seine Position um mehr als 300 km zur zuletzt gemessenen Station verändert hat, muss unter Umständen die vollständige Übertragung dieser Almanachdaten abgewartet werden. Denn die „sichtbaren“ Satelliten stimmen nicht mit den vom Gerät erwarteten Aufenthaltsort der Satelliten überein. Deshalb gibt es in allen GPS-Geräten auch die Möglichkeit ungefähre Positionskoordinaten anzugeben, damit diese Zeit des Suchens verkürzt wird. 1. Positionsbestimmung über GPS: Wie kann man diese Signale nun verwenden? Die GPS-Messung basiert auf der Laufzeitmessung der von den Satelliten ausgesandten Signale. Aus der Laufzeit wird die Entfernung zwischen Satellit und dem Signalempfänger bestimmt. Da ein Signal für die gesamte Strecke von 20.000 km bloß ca 7 Hundertstelsekunden benötigt, wird klar, welchen Anforderungen an Uhren und Auswerteverfahren gestellt wird. Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 5
Auswertung am Beispiel eines C/A Codes:
Nach einer unbekannten Anzahl von ganzen „Codes“ (mit einer Länge von 300 km) kommt
ein Code-Reststück beim Empfänger an. Angenommen, die Uhren des Satelliten und des
Empfängers gehen exakt gleich, dann kann das Signal, wie es zum Zeitpunkt des Sendens
aufgebaut war, mit dem Signal, wie es beim Empfänger eingetroffen ist, überlagert werden.
Am folgenden Beispiel ist die durch die Laufzeit ergebene Signalverschiebung eines C/A
Codes dargestellt. Die Signale werden solange gegeneinander verschoben, bis sie sich exakt
decken. Die Größe der Verschiebung entspricht der Laufzeit des Code-Reststückes.
Nachfolgendes Bild zeigt zwei identische Codes. Ausgefüllte Felder sollen binär 1, weiße Zwischenräume eine
0 darstellen. Das violette
Signal sei das Signal des
Satelliten, das Orange das
Signal des Empfängers.
Man kann jetzt einfach
bestimmen, wie weit man
das Signal verschieben
muss, damit man es direkt
zur Deckung bringt. Aus der Verschiebung, die ja einer Zeit - nämlich der Signallaufzeit vom Satelliten zur
Erde - entspricht lässt sich die Entfernung zum Satelliten berechnen
Mithilfe dieser Signalverschiebung kann ein
modernes Gerät das Reststück des 300 km langen
Codes im Idealfall auf 3 m genau berechnen. Nun
hat man aber erst das Reststück. Wie kommt man
zur gesamten Streckenlänge zwischen Satellit und
Empfänger?
Das geschieht über ein iteratives Verfahren mit
Hilfe von mehreren Satellitensignalen. Die
Entfernungen werden dabei in 300 km Schritte
unterteilt (ganze Codelänge). Es schaut jetzt hier
komplizierter aus, als es ist, da sich die möglichen
Positionen schon dadurch einschränken, dass wir
uns (sehr wahrscheinlich) auf der Erdoberfläche
befinden. Dieses Verfahren kann wesentlich
verkürzt werden, wenn bereits ungefähre
Positionsdaten bekannt sind.
Bild von www.kowoma.de
Bei GPS-Geräten, die zur hochgenauen Vermessung verwendet werden, wird zudem die
Verschiebung der beiden Trägerwellen L1 und L2 ausgewertet. Die Code-Auswertung dient
nur zur annähernden Positionsbestimmung. Im Empfänger wird die Trägerwelle erzeugt und
mit dem ankommenden Signal überlagert. Das selbst erzeugte Signal wird solange
„verschoben“, bis sich die Phasen decken. Über diese Signalverschiebung wird das
Phasenreststück exakt bestimmt. Zur Lösung „Wieviele ganze Phasen?“ das Signal vom
Satellit bis zum Empfänger hat wird die Code-Lösung als Näherungsposition benötigt. Die
Ermittlung der Anzahl der ganzen Phasen wird auch als Lösung der „Ambiguitäten“ genannt
und erfolgt durch ein komplexes statistisches Rechenverfahren. Die Handempfänger werten
nur die Codes aus.
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 6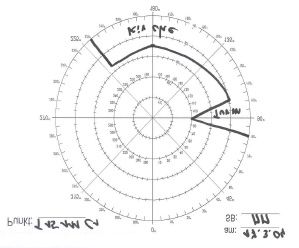
2. Einflüsse und Fehlerquellen bei der Laufzeitberechnung:
Nun haben wir einen Einblick bekommen, welche entscheidende Rolle präzise Zeitmessung
spielt. Mehr als in der Formel I, wo es maximal um Tausendstel-Sekunden geht. Beim GPS
geht es sogar um Mikrosekunden!
Wie sieht das in der Praxis aus?
Uhrenfehler im Empfänger:
Kein GPS-Empfänger besitzt Atomuhren, sondern „bloß“ eine Quartzuhr. Wie kann man dann
so genau messen? Zumal wir vorher bereits gehört haben, dass die Abweichung von
1 Hundertstelsekunde bereits 3.000 km ausmacht?
Zur Veranschaulichung der Vorgangsweise bemühen wir die Geometrie:
Bilder von www.kowoma.de
2D Positionsbestimmung mit zwei 2D Positionsbestimmung mit
Satelliten (2-dimensionale Welt) angenommenen Uhrenfehler
führt zu zwei Lösungen
2D Positionsbestimmung mit
angenommenen Uhrenfehler
führt mit 3 Satelliten zu einer
Lösung
In diesem zweidimensionalen Beispiel
werden also drei Satelliten benötigt, um
die Position des Empfängers feststellen
zu können. Im realen dreidimensionalen
Raum müssen daher 4 Satelliten
empfangen werden können. Deshalb ist
das GPS-System im Weltraum so
angelegt, dass auf jedem Punkt der Erde
jederzeit Signale von mindestens 4
Satelliten empfangen werden können.
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 7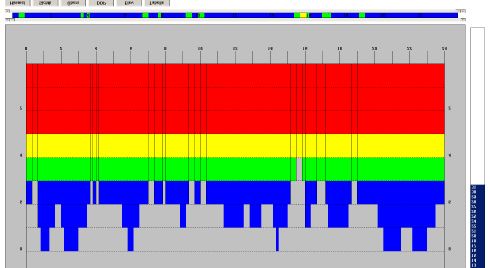
Es gibt aber immer wieder Leute, die behaupten, dass drei Satelliten bereits ausreichend sind.
Lügen die?
Nein. Wenn GPS-Empfänger mit nur drei Satelliten eine Position berechnen, dann gehen
diese von der Annahme aus, dass sich der Empfänger auf der Erdoberfläche befindet und der
4. Kreis ist daher durch den Erdmittelpunkt und den Erdradius definiert. Erdoberfläche meint
hier jedoch Meereshöhe und wenn dies im Konkreten nicht der Fall ist, wird die Position
falsch berechnet. Also lieber 4 Satelliten verwenden!
Uhrenfehler im Satelliten:
Jetzt habe ich zu Beginn gesagt, wie exakt diese Atomuhren sind und nun rede ich doch von
Uhrenfehlern? Diese Fehler sind angesichts der übrigen Einflüsse wirklich vernachlässigbar.
Ich möchte jedoch noch schnell einen Abstecher in die Relativitätstheorie machen. Nicht um
Sie völlig zu beeindrucken, sondern um Ihnen zu zeigen, was alles in die GPS-Messung
hineinspielt.
Also Einstein hat herausgefunden, dass bei schnellen
Bewegungen die Zeit langsamer vergeht als im Stillstand. Für
die Satelliten, die mit rund 12.000 km/h um die Erde sausen,
bedeutet das, dass ihre Uhren von der Erde aus gesehen
langsamer gehen. Es gibt aber einen weiteren Aspekt in der
Relativitätstheorie. Dieser besagt, dass die Zeit umso langsamer
vergeht, je stärker das Gravitationsfeld ist, in dem man sich
befindet. Also für einen Beobachter auf der Erde (starkes
Gravitationsfeld) geht die Uhr des Satelliten in über 20.000 km
Höhe und damit in geringer Erdanziehung zu schnell. Dieser
Effekt ist um einiges größer als der mit der Geschwindigkeit.
Also scheinen die Satellitenuhren in Summe aller
relativistischen Phänomene zu schnell zu gehen. Um etwa 3,8
Tausendstelsekunden pro Tag. Was einem Tagesfehler von 10
km entspricht!
Zum Glück ist das nicht unser Problem, denn die Erfinder des GPS-Systems haben sich mit
einen Trick beholfen und die Uhren um einen minimalen Betrag langsamer eingestellt und so
wird dieser Fehler automatisch kompensiert.
Verzögerungen der Signale durch die Atmosphäre:
Jetzt kommen wir der praxisorientierten Theorie näher. Wir erinnern uns nochmals:
Entscheidend für die GPS-Messung ist die Laufzeitbestimmung des Signals vom Satellit zum
Messgerät!
Das Signal breitet sich in der „Leere“ des Weltalls mit Lichtgeschwindigkeit aus. Sobald es in
die Erdatmosphäre eintritt wird es
abgebremst, abgelenkt und
beeinflusst, je nach Beschaffenheit
der Schicht, die das Signal
durchläuft. Die Erdatmosphäre ist
nämlich unterschiedlich geschichtet,
das bedeutet, sie besitzt keinen
einheitlichen Brechungsindex. Ein
elektromagnetisches Signal schlägt
stets den Weg ein, der am
schnellsten zum Ziel führt. Dies ist
Bild von www.kowoma.de
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 8nicht der kürzeste Weg. Das Signal beschreibt eine Raumkurve! Denn nur in einem Medium mit konstantem Brechungsindex ist der schnellste Weg eine Gerade. Der Einfachheit halber teilen wir die Atmosphäre in zwei Schichten von außen (wie das Signal) kommend ein: Die Ionosphäre (400 km bis 80 km) und darunter die Neutrosphäre. Was passiert in der Ionosphäre? Die hochenergetische UV- und Röntgenstrahlung der Sonne spaltet aus den Gasmolekülen Elektronen ab. Zurück bleiben positiv geladene Ionen. Die freien Elektronen heften sich an neutrale Teilchen, bilden negative Ionen und eine elektrische Ladung baut sich in der Atmosphäre auf. Die höchste Ionisierung tritt ca zwei Stunden nach der stärksten Sonnenstrahlung auf, das ist um ca 14:00 Ortszeit. Die ionisierten Teilchen stören die Ausbreitung des GPS-Signals und verzögern es. Die Beeinträchtigung der Signale hängt von deren Frequenz ab. Niederfrequente Wellen werden stärker abgebremst als hochfrequente. Diese Eigenschaft ermöglicht den Zweifrequenzempfängern aufgrund der unterschiedlichen Verzögerung von L1 und L2 die Ionosphärenstörung zu korrigieren. Einfrequenzempfänger behelfen sich mit Standardmodellen. Die Ionosphäre lässt sich jedoch nicht standardisieren. Starke Sonnenaktivität führt zu hohen Ionisierungsgraden. Diese treten in zyklischen Abständen alle 11 Jahre auf. Am besten man misst zwischen Mitternacht und Morgendämmerung, dann fallen diese Störungen weg. Es gibt auch jahreszeitliche Schwankungen, wobei seltsamerweise die Sommermonate als begünstigt erscheinen, am ärgsten sind die Wintermonate, einschließlich Frühling und Herbst. Es gibt eigene Korrekturdatendienste, die die Ionosphärenparameter den Anwendern zur Verfügung stellen. Mehr dazu jedoch später. Was passiert in der Neutrosphäre? Die heißt neutro, weil in ihr kaum ionisierte Teilchen zu finden sind. Sie teilt sich in weitere Schichten wie Troposphäre (Wetterschicht), Stratosphäre und Mesosphäre auf. Ich will auf die Details gar nicht näher eingehen, es sei hier nur so viel gesagt, dass der Wasserdampfgehalt sehr unterschiedlich verteilt sein kann und diese Moleküle das Satellitensignal ebenfalls bremsen. Die Korrekturen werden mithilfe von bekannten Modellen (zB Hopfield) berechnet. Die verbleibende Ungenauigkeit liegt im Dezimeterbereich. Es sei denn, man verwendet ein sogenanntes differentielles GPS, aber dazu komme ich noch. 3. Andere Einflüsse und Fehlerquellen: Es gäbe hier noch einige zu erwähnen, wie zB Abweichungen der Satellitenbahnen. Sonne und Mond können durch ihre Gravitationskraft die Satelliten von ihrer Bahn abbringen. Die Bahndaten werden jedoch von Bodenstationen überwacht und in den Ephemeriden den Benutzern stets aktuell zur Verfügung gestellt. Es gibt aber auch noch andere Einflüsse, die in der Praxis vom Benutzer erkannt und vielleicht vermieden werden können: Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 9
Mehrwegeffekte:
Die Satellitensignale haben, wie bereits zu Beginn des Vortrags erwähnt, ähnliche
Eigenschaften wie das sichtbare Licht. Das heißt, sie können von glatten Oberflächen
reflektiert werden. Dadurch kommt das Signal nicht direkt zum Messgerät sondern über einen
Umweg oder eben „Mehrweg“.
Das Messgerät ahnt nichts von diesem
Umweg, sondern glaubt aufgrund der
längeren Signallaufzeit weiter vom
entsprechenden Satellit entfernt zu sein.
Es kommt zu einem Fehler in der
Positionsberechnung. Wenn genügend
Satelliten empfangen werden, fällt so ein
Umwegesignal auf und kann aus der
Berechnung entfernt werden. Auch
längere Beobachtungsdauer (~ 30 min)
vermeidet diesbezügliche Fehler, da sich
mit der Zeit die Satellitenpositionen
ändern und somit die Reflexionen.
Aber am besten ist, man meidet bei der
Messung reflektierende Objekte. Dies können Hausdächer sein, Wasser- oder Schneeflächen,
manchmal aber auch ein in der Nähe geparktes Auto.
Satellitengeometrie:
Wir berechnen die Position unseres Empfängers aus der Entfernung der Satelliten zu unserem
Gerät. Stehen nun die Satelliten von uns aus gesehen hintereinander, kann es zu schleifenden
Schnitten kommen. Man spricht von einer schlechten Geometrie.
guter Schnitt
schlechter Schnitt
Bilder von www.kowoma.de
Es gibt einen Wert, der uns am Messgerätedisplay angezeigt wird und über die Geometrie
Auskunft gibt: Der DOP.
Es gibt verschiedene DOPS (dilution of precision = Verschlechterung der Genauigkeit). Bei
Handempfänger der PDOP (Positionsgenauigkeit) bei den genauen Messgeräten der GDOP
(Gesamtgenauigkeit). Der Wert gibt in einer Zahl größer Null die Verschlechterung der
Messung durch die Satellitengeometrie an. Daraus folgt, je geringer der Wert, desto besser
das Messergebnis.
Als Faustregel für die Messung gilt: Werte unter 4 sind super, zwischen 4 – 6 noch brauchbar,
von 6 - 8 mit Vorsicht zu betrachten und über 8 zu vergessen.
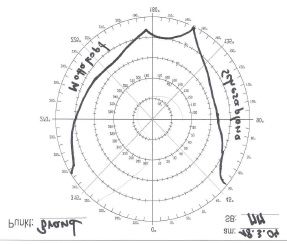
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 10Abschattungen:
Bereits zu Beginn ist erwähnt worden, dass GPS-Signale durch Gebäude, Berge oder
Vegetation abgeschirmt werden. Das führt im schlimmsten Fall dazu, dass in gewissen Orten
keine GPS-Messung möglich ist. Oft verschlechtert sich durch Abschattungen die
Satellitengeometrie so sehr, dass zwar Messergebnisse möglich aber nicht brauchbar sind.
Deshalb ist die Planung einer GPS-Messung in den meisten Fällen unumgänglich (außer man
geht segeln).
Zu diesem Zweck gibt es Formulare, in die bei kritischen Punkten die Sichthindernisse vor
Ort mithilfe eines Neigungskompasses eingetragen werden können.
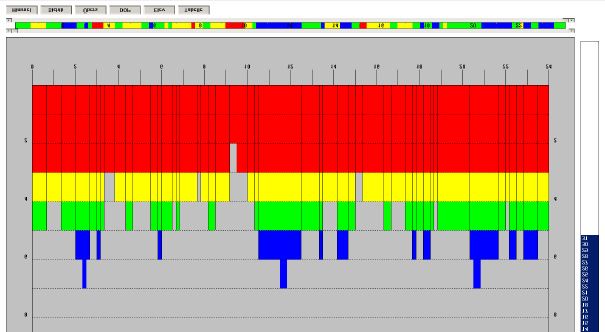
Programme zur Messplanung können mit einem aktuellen Almanach diese Sichthindernisse
berücksichtigen und zeigen für den gewünschten Messtag die Satellitenverteilung am
Himmel, deren Sichtbarkeit und der Geometrie: Sprich dem DOP. Somit kann
herausgefunden werden, wann der günstigste Messzeitpunkt herrscht um kritische Punkte zu
bestimmen.
Beispiel Brand
ohne
Berücksichtigung
der
Geländeformation
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 11Beispiel Brand mit
Berücksichtigung der
Geländeformation
Beispiel Brand: Messzeit
beschränkt sich auf
10:20 – 12:20 Uhr
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 124. Erste Zusammenfassung:
Wir wissen jetzt, wie GPS funktioniert:
• Satelliten senden zwei Signale aus (L1 und L2), die mit Codes versehen sind
• Über deren Laufzeit kann man die Entfernung zum Satellit berechnen
• Aus der Entfernung des Empfängers zu mindestens 4 Satelliten ist seine Position
bestimmbar
Es gibt Beeinträchtigungen der Signallaufzeit:
• Durch diverse Fehler (Bahnabweichung, Uhrenfehler, relativistische Effekte), die wir
nicht beeinflussen können
• Durch die Ionosphäre, deren verursachte Fehler bloß von Zweifrequenzempfängern
herausgerechnet wird
• Durch die Troposphäre, deren Verzögerung im Messwert verbleibt
• Durch Reflexionen (Mehrwegeffekte), die unter Umständen vermeidbar sind
Es gibt Verschlechterungen in der Genauigkeit
• Durch schlechte Satellitengeometrie und
• Durch Signalabschattungen, die durch gute Messplanung kompensierbar sind
Die dadurch erreichbare Genauigkeit der Position liegt im besten Fall im Bereich von
± 5 m.
Das ist zwar unter Berücksichtigung aller bisher angeführten Umstände verständlich aber
dennoch ernüchternd.
Deshalb gibt es weitere Möglichkeiten die Genauigkeit zu verbessern:
5. Verwendung von Korrekturdatendiensten bzw der Einsatz von
differentiellem GPS (DGPS).
Korrekturdatendienste WAAS und EGNOS:
Ich werde diese zwei Dienste hier nur kurz streifen, da sie für unsere Anwendungen kaum in
Frage kommen. Zwischen WAAS und EGNOS besteht kaum ein Unterschied, WAAS wurde
von den Nordamerikanern entwickelt, EGNOS von den Europäern. Zweck des Dienstes ist die
Flugsicherung.
Am Boden verteilte Empfänger zeichnen Signale von GPS und Glonass Satelliten auf
(zukünftig auch von Galileo) und berechnen die Korrekturen für die Signalverzögerung durch
die Ionosphäre für jeden einzelnen Satelliten. Zudem werden Informationen über Uhrenfehler,
Bahndatenschwankungen und Zustand der Satelliten gesammelt. In einem Zentralrechner
werden diese Daten ausgewertet und neben den Integritätsinformationen auch ein
Ionosphären-Korrekturgitter berechnet. Alle Ergebnisse gemeinsam werden an geostationäre
Satelliten gesendet, die das Signal wiederum abstrahlen.
Für die Flugsicherung ist die Integritätsinformation von entscheidender Bedeutung, denn
innerhalb von 6 Sekunden kann ein GPS-Empfänger vor auftretenden Problemen gewarnt
werden. Das ist besonders wichtig, wenn sich ein Flugzeug soeben auf eine GPS-navigierte
Landung vorbereitet.
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 13Für die zivilen Nutzer ist das IONO-Korrekturgitter interessanter. Garmin-Geräte zum Beispiel können nun, wenn sie im Abdeckungsbereich eines geostationären Satelliten sind, diese Signale kostenlos empfangen. Am Display ist dann ersichtlich, für welchen Satelliten die Korrekturdaten mitgeliefert wurden (Buchstabe D im Signalbalken des jeweiligen Satellits). Dadurch kann die Genauigkeit der Positionsbestimmung auf unter 10 Meter gesteigert werden. Das Problem ist, dass sich die geostationären Satelliten über dem Äquator befinden und daher von uns aus gesehen relativ tief im Südhimmel stehen (ca 35°). Das führt zu Problemen durch Abschattungen. Es sind bei der Verwendung dieser Daten auch andere Dinge zu beachten, die jedoch den Rahmen dieses Vortrags sprengen würden. Es sei nur noch erwähnt, dass momentan gerade neue geostationäre Satelliten die WAAS und EGNOS Aufgabe übernehmen und das System erst im 1. Quartal 2005 wieder voll funktionstüchtig ist. DGPS – Differentielles GPS: Für diese Art der Positionsbestimmung braucht man mindestens zwei GPS Empfänger. Ein Messgerät steht auf einer bereits bekannten Position, deren Werte als Referenz dienen. Aus den Satellitensignalen wird nun die Position erneut bestimmt und mit der Sollposition verglichen. Die daraus entstandenen Differenzwerte werden nun als Korrekturwerte beim zweiten Empfänger bei dessen Positionsbestimmung berücksichtigt. Passiert diese Berücksichtigung nachträglich im Büro, so nennt man das „post processing“, passiert das bei der Messung an Ort und Stelle, so nennt man das „real time“ Messung. Dazu benötigt man allerdings noch eine Sendestation am Referenzgerät und eine Empfangseinheit am „Rover“, dem beweglichen GPS-Empfänger, mit dem man von Punkt zu Punkt geht. Dieser Messvorgang liefert eine hohe Genauigkeit, vor allem wenn sich die Referenzstation in der Nähe des mobilen Empfängers befindet. Dies ist logisch, da sich Korrekturwerte ja auf dieselben Satelliten mit denselben Laufzeitverzögerungen durch die Atmosphäre beziehen sollten! Eine Streckenangabe in Bezug zur Genauigkeit zu machen ist gewagt, da man die aktuelle Situation vor Ort nicht kennt. Es kann sich zB über der Referenzstation ein Gewitter zusammenbrauen, dessen stark geladene Atmosphäre und massiver Wassergehalt die Satellitensignale stark verzögern, während im nur 10 km entfernten Nebental noch blauer Himmel strahlt und die Signale kaum beeinträchtigt werden. Eine weitere Rolle spielt natürlich auch der Höhenunterschied zwischen der Referenzstation und dem Rover. Befindet sich erstere auf einem Berggipfel, ist der Signalweg durch die Atmosphäre deutlich kürzer als beim Rover im Talboden. Referenzstationsnetz: Noch vor einigen Jahren hat die Arbeitsgemeinschaft von Ziviltechnikern (AGREF) am Pfänder eine Referenzstation betrieben und die Korrekturdaten gegen Entgelt über Ö1 ausgestrahlt (DARC-Technik = Data Radio Channel). Diese einzelne Referenzstation am Pfänder hatte den großen Nachteil nicht zentral im Land zu liegen. Da die Genauigkeit mit der Entfernung zur Referenzstation abnimmt, war der Süden Vorarlbergs benachteiligt. Es standen nun Überlegungen im Raum, dass sich einige GPS-Anwender in Vorarlberg selbst eine Referenzstation aufs Hausdach stellen. Aber da die Interessensgebiete über die ganze Landesfläche verteilt lagen, wären mehrere solcher Stationen nötig gewesen. Die Überlegungen gingen daher in Richtung einer gemeinsamen Nutzung und Vernetzung der Stationen weiter. Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 14
In der Schweiz und in Teilen Deutschlands existiert bereits so ein Netz, in Österreich befindet
es sich im Aufbau. Auf Drängen der Interessengemeinschaft LVA, VKW, VIW und VEG hat
das BEV (Bundesamt für Eich- und Vermessungswesen) im letzten Jahr die Prioritäten in
Westösterreich gesetzt und konnte im Jänner 2004 die Test-Inbetriebnahme von vier Stationen
verkünden. Alles weitere über dieses Projekt – APOS genannt – wird Ihnen Dipl. Ing. Norbert
Höggerl, Leiter des Referates „Geophysikalische Grundlagen und Präzisionsnivellement“ in
der Abteilung Grundlagen des BEV, gleich anschließend präsentieren.
6. Zweite Zusammenfassung:
Wir wissen jetzt, wie man die GPS-Positionsbestimmung optimieren kann:
• Durch Einbeziehung von Ionosphären-Korrekturdaten (WAAS, EGNOS)
• Durch Einsatz eines zweiten GPS-Empfängers: Differentielles GPS
• Oder durch die Verwendung von Korrekturdaten aus Referenzstationsnetzen (zB APOS)
Die dadurch erreichbare Genauigkeit der Position liegt mit den geodätischen
Zweifrequenzempfängern im Bereich von wenigen Zentimetern.
Mit den Codeempfängern ist je nach Preisklasse eine Genauigkeit von 0,5 Metern oder
1-2 Metern zu erzielen.
Landesvermessungsamt Feldkirch/Martina Mittelberger Seite 15Sie können auch lesen

















































