(Global Positioning System) - Seminararbeit Jan-Hendrik Borth
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
Positionsbestimmung per GPS
(Global Positioning System)
Seminararbeit
vorgelegt von
Jan-Hendrik Borth
Betreuer: Dr. Merten Joost
Institut für Integrierte Naturwissenschaften, Abteilung Physik
Koblenz, im Juni 2010Inhaltsverzeichnis
1 Vorwort
2 GPS
2.1 Allgemeine Funktionsweise
2.2 Positionsbestimmung
2.3 Signalübertragung
2.3.1 Frequenz
2.3.2 Codemodulation
2.3.3 Vereinfachtes Rechenbeispiel zur Verdeutlichung der Funktionsweise des
Codemultiplexing
2.3.4 Autokorrelation
2.3.5 Datensignal
3 Fazit und Ausblick
4 Quellenangaben1 Vorwort
Das Global Positioning System wurde ursprünglich für das Militär und die Seefahrt
entwickelt und ist aus der heutigen Zeit gar nicht mehr wegzudenke.
Seit Mitte der 90er Jahre steht ist das System auch für die zivile Nutzung öffentlich
gemacht worden.
Anfang 2000 wurde eine künstliche Signalverschlechterung abgeschaltet, wodurch GPS
zu einer genauen und kostengünstigen Lösung geworden ist, um seinen Standort auf der
Erde zu ermitteln.
Die technische Realisierung des Systems soll in dieser Arbeit erklärt und
veranschaulicht werden.
2. GPS
2.1 Allgemeine Funktionsweise
GPS (Global Positioning System) ist ein System zur Orts- und Zeitbestimmung auf der
Erde, welches mittels Weltraumsatelliten realisiert wird.
Das System besteht aus den Segmenten:
-Satelliten
-Empfänger
-Kontrollstationen
Die Satelliten senden permanent ihre genaue Position und Zeit. Durch die Signallaufzeit
kann ein Empfangsgerät die Entfernung zu einem Satelliten errechnen.
Eine Position auf der Erde kann durch die Entfernungen zu mindestens vier Satelliten
errechnet werden.
Auf der Erde befinden sich an sechs verteilten Standorten Systeme zur Kontrolle der
GPS-Satelliten, welche von der US-Armee errichtet und geleitet werden.
Es befinden sich ausreichend Satelliten im Weltraum, damit GPS weltweit zur
Positionsbestimmung genutzt werden kann.2.2 Positionsbestimmung
Damit ein Empfangsgerät seine aktuelle Position errechnen kann, müssen die Daten von
mehreren Satelliten gleichzeitig empfangen und gespeichert werden.
Vereinfacht gesagt, muss bekannt sein, welcher Satellit wann und von wo aus ein Signal
gesendet hat.
Die Entfernung zu einem Satelliten kann mittels der Signallaufzeit errechnet werden.
Für eine zweidimensionale Positionsbestimmung reichen die Daten von drei Satelliten
aus. Um eine nun auch die Höhe bestimmen zu können, wird das Signal eines vierten
Satelliten benötigt.
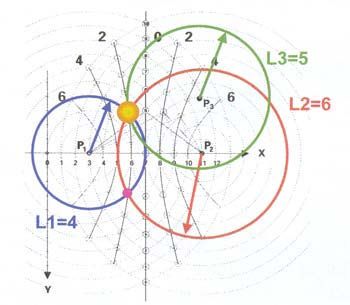
Die Berechnung einer zweidimensionalen Positionsbestimmung lässt sich anhand eines
Schaubildes verdeutlichen. Kennt man die Position und die
Entfernung von einem Satelliten, so
werden die möglichen
Positionspunkte durch einen Kreis
beschrieben. Durch die Berechnung
eines zweiten Satelliten, kann man die
möglichen Positionen auf die
Schnittpunkte der zwei bekannten
Kreise begrenzen. Ein dritter Kreis
bestätigt einen der zwei Schnittpunkte
und die Position auf einer Ebene ist
Positionsbestimmung in der Ebene (2) vollständig berechnet.
In der Praxis sieht es aber so aus, dass für eine zweidimensionale Positionsbestimmung
vorerst zwei Satelliten ausreichen, da sich einer der zwei Schnittpunkte weit entfernt
von der Erde befindet.Es werden dennoch, wie bei der
Einführung richtig erwähnt wurde, drei
Satelliten benötigt. Grund dafür ist eine
benötigte Fehlerkorrektur in der
Zeitmessung. Es ist unmöglich, dass die
Uhren aller GPS-Empfänger ganz genau
mit denen der GPS-Satelliten
http://www.kowoma.de/gps/Positionsbestimmung.htm übereinstimmen.
Daraus ergibt sich, dass die gemessene Zeit nicht mit der tatsächlichen Signallaufzeit
übereinstimmen kann, da der Sendezeitpunkt im Signal enthalten, aber ein anderer als
im Empfänger ist.
In dem Schaubild wird der Fehler
verdeutlicht. Es wird angenommen, dass
die Uhr des Empfängers eine halbe
Sekunde von dem des Satelliten vor
geht. Ohne eine Fehlerkorrektur würde
man berechnen, dass man sich am Punkt
B befindet, während Punkt A der
korrekte Standort wäre.
http://www.kowoma.de/gps/Positionsbestimmung.htm
In der folgenden Abbildung erkennt man, dass ein dritter Satellit den Fehler nicht direkt
verbessern kann. Um den Punkt A zu berechnen, werden die Radien so lange
gleichmäßig verschoben, bis nur noch
ein Schnittpunkt existiert. Dieser
Schnittpunkt wäre der Punkt A, der nun
korrekt Berechnet wurde.
Bei einer räumlichen Darstellung muss,
wie auch bereits erwähnt ein vierter
Satellit hinzugenommen werden. Eine
Veranschaulichung ließe sich durch
Kugeln realisieren, da in die dritte
http://www.kowoma.de/gps/Positionsbestimmung.htm
Dimensionen übergegangen werden
Zu den Abbildungen sei gesagt, dass es sich hier nur um Beispielwerte handelt, welche
stark von den tatsächlichen Signallaufzeiten abweichen.2.3 Signalübertragung
Das Signal eines GPS-Satelliten muss diverse Eigenschaften erfüllen, damit die
Positionsbestimmung auf der Erde reibungslos funktionieren kann.
2.3.1 Frequenz
Die Frequenz darf nicht zu hoch sein, da für den Empfang Richtantennen notwendig
wären. Jedoch auch nicht zu niedrig, da niedrige Frequenzen sich nicht so schnell
ausbreiten und dies die Laufzeitberechnung negativ beeinflussen würde.
Die Frequenz sollte außerdem störunabhängig gegenüber von z.B. wetterbedingen
Einflüssen, wie Wolken und Regen sein und möglichst viele Daten in kurzer Zeit
übertragen können.
GPS-Satelliten funken mit zwei Frequenzen, eine dieser Frequenzen ist für die zivile
Nutzung frei zugänglich, die andere wird fast ausschließlich vom Militär benutzt und
daher wird in dieser Ausarbeitung nicht näher erläutert.
Aufgrund der oben erwähnten Eigenschaften, welches das Signal aufweisen muss, hat
man sich für die Frequenzen
-L1: 154*10,23MHZ = 1575,42 MHz
-L2: 120*10,23MHZ = 1227,60 MHz
entschieden.
Dabei ist 10,23 MHz die Grundfrequenz, mit welcher die Atomuhren in den Satelliten
betrieben werden.
Die Frequenzen liegen im sogenannten L-Band, wobei L1 die Frequenz ist, welche für
zivile Zwecke genutzt wird.
2.3.2 Codemodulation
Ein GPS-Empfänger hat das Problem, dass alle Satelliten ihre Daten über die selbe
Frequenz senden, aber wissen muss, welcher Satellit welche Daten gesendet hat.
Um dies zu ermöglichen, wurde ein Codemultiplexverfahren für die Signalübertragung
verwendet.
Durch dieses Verfahren kann ein GPS-Empfänger die Nutzdaten jedes einzelnen
Satelliten aus einem einzigen Signal decodieren. Alle Satelliten besitzen einen
festgelegten „Pseudo Random Noise Code“(PRN-Code).Anders als durch den Namen vermutet wird, ist ein PRN-Code keine Zufallsfolge. Er
besteht aus 1023 Bits. Bei einer Länge von 1023 Bits ließen sich theoretisch 21023
Satelliten identifiziert werden, jedoch werden nur 32 dieser theoretischen Möglichkeiten
genutzt werden, da es sich bei diesen Möglichkeiten um GOLD-Codes (benannt nach
einem Mathematiker) handelt. Da es sich bei dieser Folge um keine Daten handelt,
sondern ausschließlich zur Identifizierung dient, spricht man hier von “Chip“ und nicht
„Bit“. Diese 32 Folgen haben die Eigenschaft, dass unter ihnen die Korrelation
besonders schwach ist, wodurch eine genaue Identifizierung sichergestellt werden kann.
Um einen Satelliten zu identifizieren, müssen dem Empfangsgerät alle PRN-Codes
bekannt sein. Der PRN-Code und die Daten werden mit einer unterschiedlichen
Frequenz in das Trägersignal hinein moduliert. Die Chiplänge ist hier wesentlich kürzer
als die Bitlänge.
http://www.kowoma.de/gps/Signale.htm
2.3.3 Vereinfachtes Rechenbeispiel zur Verdeutlichung der Funktionsweise des
Codemultiplexing
In diesem Beispiel wird von drei Sendestationen ausgegangen.
Als vereinfachten PRN-Code verwendet:
-Station A (1, -1,-1,1)
-Station B (1,1,-1,-1)
-Station C (-1,1,-1,1)
Dabei fällt auf, dass die Codes zueinander orthogonal sind und der Low-Pegel mit -1
angegeben wird, was auch bei den wirklichen PRN-Codes der Fall ist.Alle Stationen senden gleichzeitig folgende Daten:
-Station A (1,1)
-Station B (-1,-)
-Station C (1,-1)
Gesendetes Signal:
Sender Chips Daten Gespreizte Signal
A 1 -1 -1 1 11 -1 1 1 -1 -1 1 1 -1
B 1 1 -1 -1 -1 - 1 1 -1-1 0000
C -1 1 -1 1 1 -1 1 -1 1 -1 -1 1 -1 1
Gesamtsignal 1 1 1 -3 -2 2 0 0
Wie bereits erwähnt, ist die Chiplänge wesentlich kürzer als die Bitlänge. Es ergibt sich
ein gespreiztes Signal, welches dadurch kennzeichnet, dass mehr Signale als Daten
gesendet werden.
Das gespreizte Signal ergibt sich durch eine Modulo-2 Addition eines gesamten Chips
einem Bit. Das Gesamtsignal ist die Summe aller gespreizten Signale.
Empfangenes Signal:
Sender Chips Empfangssignal Dekodiert Daten
A 1 -1 -1 1 1 1 1 -3 1 -1 -1 -3 -4 H
-2 2 0 0 -2 -2 0 0 -4 H
B 1 1 -1 -1 1 1 1 -3 1 1 -1 3 4L
-2 2 0 0 -2 2 0 0 0-
C -1 1 -1 1 1 1 1 -3 -1 1 -1 -3 -4 H
-2 2 0 0 2200 4L
Zur Decodierung wird das Empfangssignal mit dem jeweiligen Chip multipliziert und
die einzelnen Werte addiert. Ist das Ergebnis ein negativer Wert, so wurde eine 1, beieinem positivem eine -1 als Datenbit gesendet. Wurde nichts gesendet, so ist das Ergebnis 0(4.). 2.3.4 Autokorrelation Die Autokorrelation wird benutzt um die Signallaufzeiten der einzelnen Satelliten zu ermitteln. Das Empfangene Signal wird jeweils mit den bekannten PRN-Codes multipliziert. Aus dem Produkt wird die Quersumme gebildet. Dieser Vorgang wird für jedes Bit des PRN-Codes wiederholt, wobei der PRN-Code immer um eine Stelle verschoben wird. Bei dem Punkt, an dem die Quersumme maximal ist, befindet sich der Anfang des Signals. Der gewählte PRN-Code stimmt dabei mit dem des Satelliten überein. Die PRN-Codes wurden so gewählt, dass sich ein eindeutiges Maximum nur mit einem richtig gewählten PRN-Code erreichen lässt. Durch die Anzahl der Verschiebungen bis zum Maximum, ergibt sich die Signallaufzeit(2). In der Abbildung wird verdeutlicht, wie ein Satellitensignal aus dem Empfangssignal gefiltert wird. An den Peaks der Kurven erkennt man deutlich den Signalanfang. http://www.ottmarlabonde.de/L1/krzkor.Applet1.html (5.)
2.3.5 Datensignal Ein Satellit sendet ununterbrochen Datensignale aus. Darin enthalten sind z.B. sogenannte Ephemeriden, welche die Parameter zur Satellitenbahn enthalten, die zur Positionsbestimmung der Satelliten benötigt werden. Desweiteren befinden sich hier Zeit- und Statusangeben des Satelliten sowie der Almanach, mit welchem man die grob berechnen kann, welche Satelliten zur Verfügung stehen. Die Almanach und Ephemeriden werden gespeichert und verhelfen zu einer schnelleren Positionsbestimmung, wenn das Signal kurzzeitig unterbrochen wurde. http://www.kowoma.de/gps/Signalaufbau.htm Ein Datensignal besteht aus 25 Frames. Diese Frames enthalten 5 Subframes in welchen 10 Worte a 30Bit gespeichert sind. Jedes Frame besteht daher aus 1500 Bit und wie bereits erwähnt, werden die Daten mit 50Hz auf das Trägersignal modelliert. Das heißt, dass ein Frame 30s braucht, bis es komplett übertragen wurde. Der Anfang jedes Subframes besteht aus dem TLM (telemetry word) und dem HOW (hand over word). Das TLM informiert über die Aktualität der Ephemeriden und enthält zusätzlich ein Synchronisationsmuster, welches den Zugang zu den Daten erleichert. Das HOW enthält die Anzahl der vergangenen sechs Sekunden seit dem letzten Sonntag 0:00. Desweiteren enthält das HOW Informationen darüber, ob die Daten des Satelliten brauchbar, bzw. unbrauchbar sind, wenn z.B. ein Fehler im Satelliten vorliegt. Die empfangenen Daten können in diesem Fall vom Empfänger verworfen werden. Das TLM und HOW sind die einzigen Worte, welche von jedem Satelliten selber erzeugt werden. Alle anderen Worte werden von der Kontrollstation erstellt und von dem Satelliten lediglich aus dem Speicher gelesen(2. S.23).
3 Fazit und Ausblick
Das Global Positioning System ist aus der heutigen Zeit nicht mehr wegzudenken und
wird von den meisten als selbstverständlich und alltäglich betrachtet. Dabei ist es ein
kompliziertes System, welches sich nicht in kurzer Zeit erklären lässt.
Dennoch wird an weiteren Systemen gearbeitet um eine noch genauere
Positionsbestimmung zu erreichen.
Der Nachfolger von GPS wird voraussichtlich „Galileo“ welches 2014 starten soll(6.).
Dieses System soll eine Genauigkeit von ca. 4m aufweisen (zum Vergleich: GPS weicht
in 90% der fällt ca.7,8m ab(8.)).
4 Quellenangaben
(1.) Wie funktioniert GPS. Alles Wissenswerte
- http://www.kowoma.de/gps/
(2.) Braun, Matthias: Das GPS-System –Funktionsweise und
Einsatzmöglichkeiten im Physikunterricht
- http://www.physik.uniwuerzburg.de/~wilhelm/arbeiten/ZulaGPS.pdf
(3.) Bohdanowicz, Frank
- https://userpages.uni-koblenz.de/~bohdan/UNI/GdRN/Blatt3/Blatt3loesung.pdf
(4.) Zwei Applets zur Veranschaulichung des Prinzip der Kreuzkorrelation
- http://www.ottmarlabonde.de/L1/krzkor.Applet1.html
(5.) Zwei Galileo-Navigationssystem GPS-Glonass News und Infos
- http://www.galileo-navigationssystem.com/
(6.) Zwei Galileo-Navigationssystem GPS-Glonass News und Infos
- http://www.galileo-navigationssystem.com/
(7.) http://de.wikipedia.org/wiki/Global_Positioning_SystemSie können auch lesen