Seminararbeit Bau eines Wii Quadrocopters
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Berufliche Oberschule Inn-Salzach
Staatliche Fachoberschule und Berufsoberschule Altötting
Seminar 2011
Seminararbeit
Bau eines Wii Quadrocopters
vorgelegt von: Max Wolfgang Aigner
Klasse 13T1
Schmied in Lindach 28
84503 Altötting
Tel.: 08671/9580299
Max_aigner@web.de
Betreuende Lehrkraft: Herr Marcus Wendlinger
Abgabetermin: 4. Oktober 2011
~1~ 1 Einleitung 4 1.1 Funktionsprinzip 4 1.2 Lagestabilisation 5 1.2.1 Gyrosensoren (Wii Motion Plus) 5 1.2.2 Luftdruck-Höhenmessung 7 1.2.3 GPS System 7 1.2.4 Heading Hold-Modus 7 1.2.5 ACC-Modus 8 1.3 First Person View (FPV) 8 2 Materialien 8 2.1 Luftschrauben 9 2.2 Trägersystem 9 2.3 Motoren 10 2.4 Platinen Bausätze 11 3 Fertigung 12 3.1 Übungen 12 3.2 Achsenkreuz 12 3.3 SMD Platine bestücken 13 3.4 Wii-Lagesensoren extrahieren 14 3.5 Akku Löten und laden 16 3.6 Summensignalgeber (QuadroPPM12) mit Empfänger 18 3.7 Motoren einbauen 19 3.8 Motorregler öffnen/anschließen 20 3.9 Kamera installieren 23
~2~ 3.10 LED Stripes 23 3.11 Fernsteuerung „binden“ 24 4 Schwierigkeiten + Lösungen 24 4.1 Fehlende Lieferung 25 4.2 Programmierung Motorregler 26 4.3 Spannungsregler zu heiß 27 4.4 Beschaffung Spezialelektronik 27 4.5 Motoraufnahme zu groß ( 5 mm statt 3) 28 4.6 Motorschrauben zu tief 29 4.7 Motoren falschherum 30 4.8 Funk-Empfänger defekt 30 4.9 Akku ausgebeult 30 4.10 Akku Einzug durch Zoll 31 4.11 Kamera stört Fernbedienung 32 4.12 Steuersoftware stürzt ständig ab 32 4.13 Quadrocopter Kreiselt in der Luft 32 5 Erster Flug 33 6 Tests und Verbesserungen 34 6.1 Kostensparen 34 6.2 Form 35 7 Zukunftsausblick 35 8 Resümee 36
~3~ 9 Eidesstattliche Erklärung 37 10 Tabellarisches Literaturverzeichnis 38
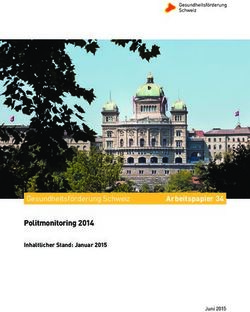
~4~ 1 Einleitung Ein Quadrocopter „ist eine Art Hubschrauber oder Senkrechtstarter mit vier über Kreuz angeordneten Propellern, die nach oben zeigen“ 1 . Unter Elektronikern gilt er als das Vorzeigeprojekt schlechthin und ist von der Komplexität etwa auf der Höhe von Hexapots2 und Teslaspulen 3 . Der große Vorteil dabei ist, dass es keine komplexe mechanische Rotorsteuerung braucht. Hauptsächlich durch die einfache Bauweise ist er im Modellbau als Sportgerät, im Militär als Aufklärungsdrohne, sowie bei bildgebenden Verfahren (Kartographie/Fotographie) im Einsatz. In dieser Seminararbeit erläutere ich den grundlegenden Aufbau, die Funktionsweise und die Fertigung eines hauseigenen Quadrocopters unter Nutzung möglichst einfacher und preiswerter Materialien. Eine gewisse Grundkenntnis im Bereich Mikroelektronik ist Voraussetzung. Für den Nachbau kommt man auch an AVR Erfahrung und Lötkenntnissen nicht vorbei. Ein Jahr Erfahrung in diesem Gebiet ist jedoch oft ausreichend. 1.1 Funktionsprinzip Je nach Drehzahl der einzelnen Luftschrauben (vgl. die Kreise in Abb. 1) ändert sich das Drehmoment. Da A und B in die gleiche Richtung drehen, müssen D und B in die andere Richtung „gegensteuern“. Ist die Summe der rechtsdrehenden Momente (D-B) z.B. größer als die Summe der linksdrehenden Momente (A-C), so dreht sich die Maschine an der senkrechten Achse nach links, um im gesamt Drehmoment wieder auf null zu kommen. Alle vier Rotoren wirken senkrecht nach unten (nicht-drehbar). Die Steuerung erfolgt durch Änderung der Drehzahlen oder, theoretisch auch möglich, die Änderung der Anstellwinkel der einzelnen Rotorblätter. Das Kippen nach vorne (Nick) erfolgt durch Änderung der Drehzahl zwischen A und C (A dreht schneller, C gleichsam langsamer) Kippen zur Seite (Roll): Drehzahlverhältnis von D und B ändert sich. 1 Sander, Klaus: „Vier gewinnt! oder Was ist ein Quadrocopter“, http://www.rc-modellbau.de/vier-gewinnt-oder-was-ist-ein-quadrocopter.html, 03.10.2011 2 Ein sechsbeiniger Spinnenroboter 3 Eine große Spule, die Blitze erzeugt
~5~ Abb. 1: Prinzip Quadrocopter Drehen um die Höhenachse (Gier oder Yaw): B-D drehen gleichmäßig schneller/langsamer als A-C Sinken bzw. Steigen: Alle vier Rotoren ändern ihre Drehzahl. 1.2 Lagestabilisation Ein derartiges System alleine ist sehr stark störanfällig und kaum zu fliegen. Aus diesem Grund kommen verschiedene elektronische Hilfsgeräte zum Einsatz, die automatisch Kursabweichungen und Schräglagen ausgleichen. 1.2.1 Gyrosensoren (Wii Motion Plus) Gyrosensoren oder auch Gyroskope messen die Drehänderung von Objekten. Dadurch kann durch einen Mikroprozessor gegengesteuert werden, wenn der Quadrocopter sich zur Seite dreht (durch einen Windstoß z.B.). Von der Funktion her ist das also das Lagesinnesorgan des Hubschraubers.

~6~
Leider sind solche Geräte für Heimanwender kaum erschwinglich. Man kann sie aber recht
leicht aus der Wii Motion Plus ausbauen, die sich durch den geringen Preis von rund 13€4
hervorragend als Bauteilquelle anbietet. Prinzipiell ist ein Gyrosensor ein sich um eine
Achse drehender Kreisel. Wenn ein Drehmoment entgegen der Drehachse wirkt, ändert
sich die Zahl der Umdrehungen des Kreisels geringfügig, was sich z.B. durch einen Laser in
einem (mechanischen) Mikrosystem (sog. MEMS=Mechanical Embdedded Micro System)
messen lässt. Ein derartiges System ist nur einige Mikrometer groß, wodurch es mit dem
bloßen Auge kaum zu erkennen ist.5
Abb. 2: Milbe vor einem MEMS-System
6
In der Motion Plus ist ein IDG-600 Sensor der Firma InvenSense eingebaut7 um X- (Pitch)
und Y-Rotationen (Roll) zu erfassen, sowie ein EPSON X3500W8, der die Z-Drehung(Yaw,
oder auch Gier) misst.
4
Quelle: Nintendo: „Wii-Motion Plus“, http://tinyurl.com/5tdg9le, 12.09.2011
5
Quelle: Ralf Erlebach: „Physikalisches Grundpraktikum Versiuch 115 Kreiselgesetze“,
http://www.personal.uni-jena.de/~p1erra/physik/protokolle/seite%20157-%20versuch%20115.pdf,
12.09.2011
6
Bildquelle: Sandia National Laboratories: „A spider mite next to a MEMS gear train”,
http://mems.sandia.gov/gallery/images_bugs_on_mems.html, 12.09.2011
7
Quelle: „Inside The New Wii Motion PlusTM Accessory”,
http://invensense.com/mems/gaming.html, 12.09.2011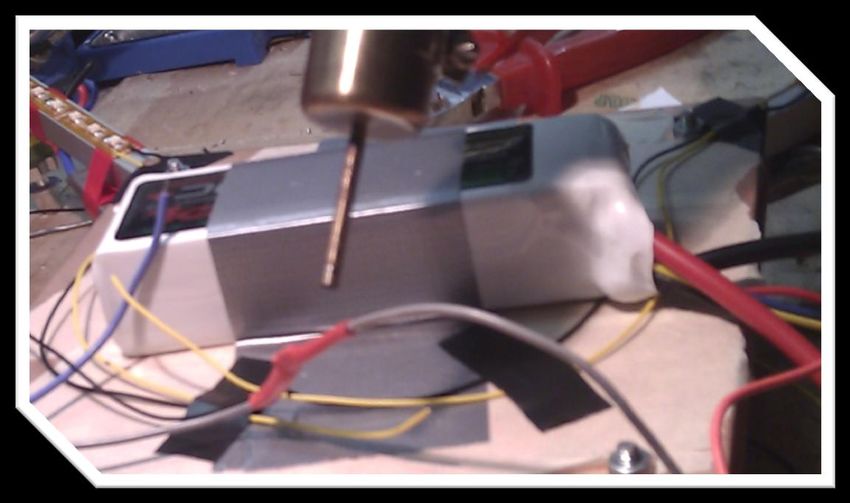
~7~
1.2.2 Luftdruck-Höhenmessung
Um eine konstante Höhe zu messen und im Extremfall einen Sturz abzufangen kann man
einen Höhenmesssensor verbauen. Ein ambitionierter Entwickler verwendet dazu den
9
MPX4115-Sensor. Mein Quadrocopter fliegt jedoch ohne diese aufwändige
Zusatzfunktion.
1.2.3 GPS System
Mit einem GPS System ist es möglich, einen RC10-Copter als Drohne von einem Punkt auf
der Landkarte zu einem anderen zu schicken, oder einfach in der Luft auf einer Position zu
„parken“. Dazu wird ein GPS-Modul benötigt, das man z.B. aus defekten
11
Navigationssystemen ausbauen kann . Außerdem muss ein 3-Achs-Kompass
implementiert werden, damit die Maschine weiß in welcher Richtung Norden liegt und so der
Landkarte bzw. dem eingegebenen Ziel folgen kann. Zusätzlich empfiehlt sich ein
Luftdruck-Höhensensor, da das System sonst mit der Zeit absinken und abstürzen könnte.
Somit ist auch ein Fliegen per Laptop und Maus möglich. Aufgrund der dafür zu knappen
Zeit ist dieses Feature nicht in meinem Projekt eingebaut. Gesetzlich ist das autonome nicht
direkt verboten, dafür jedoch indirekt in der Luftverkehrs-Ordnung §12 (Vermeidung von
Zusammenstößen) und §13 (Ausweichregeln). So heißt es da: „Der Luftfahrzeugführer hat
… zu Luftfahrzeugen … Abstand einzuhalten.“ 12 Wobei der Abstand 150 Meter beträgt.
1.2.4 Heading Hold-Modus
Im Heading Hold Modus versucht der Mikrochip des kleinen Hubschraubers jede
eingegebene Drehung und Bewegung beizubehalten, bis gegengesteuert wird. Außerdem
versucht er sich nicht von Wind und äußeren Einflüssen von der Flugbahn abbringen zu
lassen. Dreht man den Quadrocopter um 90° (egal um welche Achse), so wird er
8
Quelle: Fraux, Romain: „Reverse Costing analysis - Epson Toyocom X3500W 1-Axis QMEMS
Gyroscope”,
http://www.i-micronews.com/upload/Rapports/Sample_Epson_Toyocom_X3500W_QMEMS_Gyro.p
df, 14.09.2011
9
Quelle: Pfeifer, Thomas: „Eigenbau-Quadrocopter”,
http://thomaspfeifer.net/quadrocopter_selbstbau_avr.htm, 14.09.2011
10
Remote Control, Fernsteuerung
11
Pfeifer, Thomas: „GPS-Tracker“, http://thomaspfeifer.net/gps_tracker.htm, 14.09.2011
12
„Luftverkehrs-Ordnung (LuftVO)“, http://www.gesetze-im-internet.de/luftvo/BJNR006520963.html,
14.09.2011
~8~
irgendwann auf dem Boden aufschlagen, da er sich nicht automatisch in die Ruhelage
zurückdreht.13 Der gewonnenen Flugfreiheit steht somit eine Palette vom Komfortverlust bis
hin zum Sicherheitsrisiko gegenüber. In der Luftfahrt spricht man auch oft von einem
„HDG“-Modus.
1.2.5 ACC-Modus
Im Gegensatz zum Heading-Hold steuert das Fluggerät automatisch nach jeder Bewegung
in seinen Ursprungszustand zurück, schwebt also wieder auf der aktuellen Position, bis man
wieder eine Eingabe macht. Das vermeidet große Unfälle, da im Notfall einfach alle Hebel
der Fernbedienung losgelassen werden müssen, und der Copter bremst sich von bis zu 90
km/h in den Schwebemodus.
1.3 First Person View (FPV)
Bei einem FPV System steuert man das Flugzeug über eine Video Brille oder ein Display,
die bzw. das über Funk mit einer Onboard-Kamera verbunden ist. Die Kamera muss dabei
unbedingt eine andere Frequenz als die Fernbedienung haben. Es gibt aktives und passives
FPV, wobei man beim passiven das System keine Funk-Kamera besitzt, sondern nur ein
Video aufnimmt, das man im Nachhinein anschauen kann. Beim aktiven fliegt man aus Sicht
des Flugzeuges.
2 Materialien
Die Materialien eines Quadrocopters müssen möglichst leicht sein. Meist nimmt man für den
Grundrahmen ein Alu-Vierkant-Rohr auf das man eine Kunststoffplatte schraubt, die den
elektronischen und mechanischen Bauteilen als Träger dient.
Bei einigen Schwebeplattformen werden auch Karbon Außenhüllen verwendet. Diese sind
jedoch aufwändig zu formen und sehr teuer. (bei Ebay.com für Ca. 95,00€)14 Stellenweise
wird sogar auf Styropor und Sperrholz-Steckverbindugen zurückgegriffen15. Das kann u.U.
bei Abstürzen jedoch zu starken Elektronikschäden führen.
13
MartinR: „HeadingHold”,
http://www.mikrokopter.de/ucwiki/HeadingHold#Fliegen_im_Heading_Hold-Modus, 14.09.2011
14
Seangyf520: „Multi Rotor Helis Quadrocopter Carbon Fiber Airframe”, http://tinyurl.com/5uzt23k,
11.09.2011
15
Vögtli, Christian: „Quadrocopter, Mechatroniklabor-Projektarbeit“,
http://www.cvengineering.ch/index-Dateien/quadrocopter.htm, 11.09.2011
~9~ 2.1 Luftschrauben Die Luftschrauben müssen die meiste Kraft aushalten. Aus diesem Grund sind sie aus harten Kohlenstoffasern oder gummiähnlichen Stoffen, die bei Stoßkontakt federn. Erstere haben den Nachteil, dass ab einer spezifischen Belastungsgrenze der Propeller in Kleinteile zerlegt wird. Bei diesem Projekt benötigt man zwei linksdrehende und zwei rechtsdrehende Rotorblattsysteme. Luftschrauben sind starke Verschleißteile. Es empfiehlt sich drei Sätze zu lagern, um im Falle eines Absturzes sofort neue einsetzen zu können. Sie werden mit dem Motor verschraubt und drehen sich im Flug durch die Rotation selbst weiter fest. Abb. 3: Links- und rechtsdrehende Luftschrauben 2.2 Trägersystem Als Trägersystem wird bei diesem Quadrocopter wie oben angesprochen ein Alu-Vierkant (10*10mm) verwendet. Zur Stabilisation wird oben und unten jeweils eine Kupferplatte montiert, oft nimmt man jedoch PVC, GFK, CFK oder ähnliche Kunststoffe. Hauptsache ist ein stabiler Rahmen, der den hohen Kraftaufkommen gewachsen ist. Der Vorteil der Kupferplatine ist die Zähigkeit verbunden mit dem geringen Preis, den größten Nachteil, die Leitfähigkeit, macht man mit genügend Isoliermaterial wieder wett.
~ 10 ~
Abb. 4: Trägersystem
(Trägersystem
2.3 Motoren aus Alu-Vierkant und Kupferplatten)
Für den Antrieb eignet sich ein Blick ins Ausland, vor allem Hobbyking hat ein großes
Sortiment an Brushless Außenläufermotoren. Grundsätzlich kann man auch
Bürstenmotoren verwenden, die haben den Nachteil dass sie um einiges schwächer sind,
dafür aber schneller drehen können. Brushlessmotoren werden mit einer Steuerplatine,
dem sog. Motorregler angesprochen, der sie mit Strom versorgt und die Drehzahl 50 Mal pro
Sekunde ändern kann. Da das für unsere Zwecke zu langsam ist (wie man im Versuch
feststellt beginnt die Maschine zu trudeln), muss der Abtastwert durch eine Experimentelle
Software aus dem Netz auf 500 Hz erhöht werden. 16 Es kommt dabei zu einem
Garantieverlust (mehr dazu im Kapitel 3.7 „Motorregler öffnen/anschließen“).
Ich verwende Robbe-Roxxy 2824-34 Motoren mit einer Spitzendrehzahl von ca. 1100
U/min. Dringend zu beachten ist, dass die Motorwelle mit der Luftschraube kompatibel ist,
andernfalls muss man mit einem Akkuschrauber nachbohren. In diesem Fall sollten beide 5
mm Durchmesser haben. Die Preisspanne geht hier von 27€ bis unter 10€17.
16
„Brushless-Regler“
http://www.qc-copter.de/wiki/index.php?title=Brushless-Regler#Normale_BL-Regler_umflashen,
19.09.2011
17
„Brushless Motoren“,http://www.qc-copter.de/wiki/index.php?title=Brushless-Motoren, 19.09.2011~ 11 ~
Abb.5: Außenläufer Elektromotor
2.4 Platinen Bausätze
Für die Steuerungsplatine gibt es einige fertige Bausätze, oder man baut sie sich selbst
zusammen. Preislich ist jedoch eine Eigenkreation teurer und schwerer, da man nur schwer
SMD Bauteile verwenden kann, bzw. nicht das nötige Ätzsystem besitzt. Um einen
möglichst großen Freiraum zu lassen, was Erweiterungen angeht, verwende ich die
Quadrocontrol III, die noch zusammengelötet und bestückt werden muss, dafür
umprogrammierbar und multifunktional ist. Ein Bauteilschutz lässt sich kaum mit
Sicherungen realisieren, deswegen muss immer auf die richtige Montage vor allem der
eigenen Geräte geachtet werden (richtige Polung beachten!) Eine Bauteilliste und
Beschreibung der QC III findet man im Internet.18
Grundsätzlich hat die Platine die Aufgabe, die Drehzahlen der Motoren über die Regler zu
ändern um zu fliegen, die Gyroskope abzufragen um die Drehung richtig einzustellen,
Kamera und Funksystem abzufragen und optische Instrumente mit Strom zu versorgen. Sie
besitzt einen Anschluss an den Computer (RS232, „COM-Schnittstelle“) über den man die
Einstellungen an der Software mit Hyperterminal tätigen kann.
18
„Hauptseite“, http://www.qc-copter.de/wiki/index.php?title=Hauptseite, 19.09.11~ 12 ~
3 Fertigung
Für den Bau der Drohne braucht man eine kleine Elektronikwerkstatt, wie man sie oft in
örtlichen Firmen oder bei Bekannten findet. Ich danke hierbei vor allem Florian Eberl und der
Cartesy GmbH für die Bereitstellung der Maschinen. Benötigt wird: ein Akkuschrauber,
Lötstation, Heißluft (optional), Multimeter, Schraubstock, Labornetzteil, eventuell eine Fräße
etc. Grundsätzlich gilt: Erst alle Einzelsysteme testen, dann an das Gesamtprojekt
anschließen. Außerdem immer auf Verpolung testen (ob Plus/Minus vertauscht ist).
3.1 Übungen
Zur Übung habe ich ein BTM-222, über das ich die Programmierung später umleiten wollte
zusammengelötet (drahtlose Entwicklung). Leider ist mir wegen eines Fehlers im Datenblatt
die Antenne verschmort.
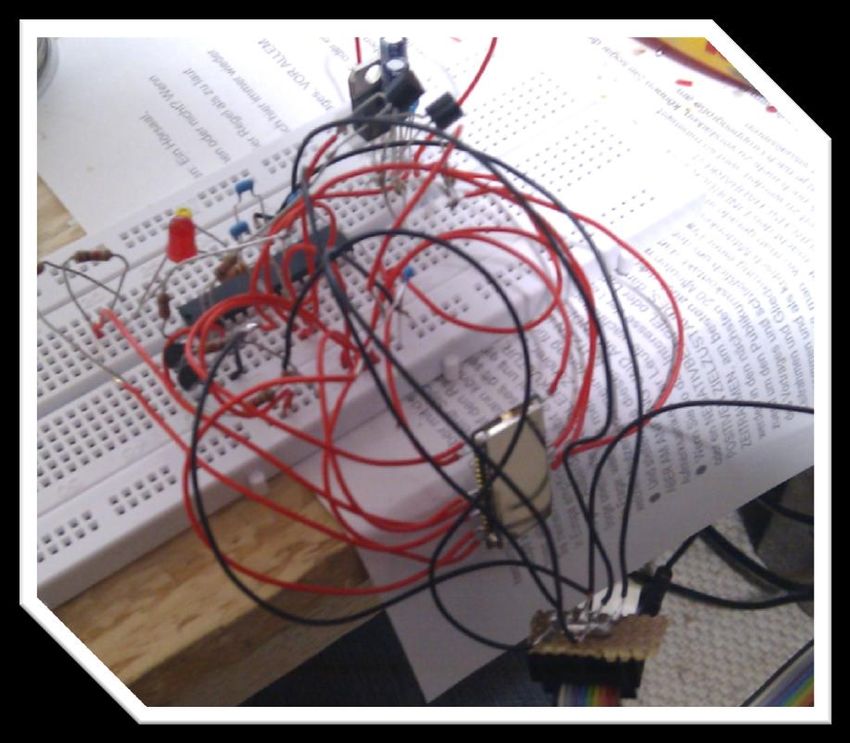
Abb. 6: Idee und Schaltung zur Bluetooth Steuerung
5V Spannungsregler
Transistoren
Atmega-8 (Prozessor)
BTM-222
ISP Programmierstecker
(In-System-Programmer)
Unbedingt ist das SMD Löten vorher zu trainieren.
3.2 Achsenkreuz
Das Achsenkreuz wird in den Schraubstock eingespannt und in der Mitte jeweils ein
10x5mm großes Stück herausgefeilt, sodass man die Vierkante ineinander verkeilen kann.~ 13 ~ Danach werden zwei Kupferplatinen oben und unten mit insgesamt vier Schrauben befestigt, die gleichzeitig durch die Vierkante gehen. Dadurch ist eine große Stabilität gewährleistet. Zur Isolation des Platinenmetalls kann man Schaumstoffplatten nehmen. 3.3 SMD Platine bestücken SMD bedeutet „surface-mounted device“ und beschreibt eine Bauteilart, die nicht an Drähten, sondern direkt an der Oberfläche einer Platine angeschlossen wird. Diesen Vorgang nennt man Oberflächenmontage („surface-mounting technology“, SMT). Man kann ein Lötpulver auf die Lötpads auftragen und dieses mit einem Heißluftlötkolben erhitzen, sodass sich das Bauteil mit den Lötpunkten auf der Leiterplatte verbindet, oder man verwendet einen konventionellen Lötkolben mit feiner SMD-Spitze. Ersteres muss vor allem bei dem Mikrocontroller der QuadroPPM12 getan werden, da sich der Mikrochip mit über 20 Pins nicht sicher Stück für Stück anlöten lässt. Der Rest wurde hier mit einem SMD-Lötkolben gefertigt. Da die Bauteile wenige Millimeter groß sind braucht man eine Pinzette und unter Umständen auch eine Lupe. Zuerst wird etwas Zinn auf den Lötkolben gegeben um seine Hitzeleitfähigkeit zu erhöhen, dann gibt man einen kleinen Zinntropfen auf das Lötpad der Platine. Jetzt wird das Bauteil mit der Pinzette so ausgerichtet, dass es den Zinntropfen berührt. Mit einem kurzen Antippen vonseiten des Lötkolbens verbindet sich das Bauteil mit der Platine. Das Gleiche Verfahren wird an den anderen Pins wiederholt.
~ 14 ~
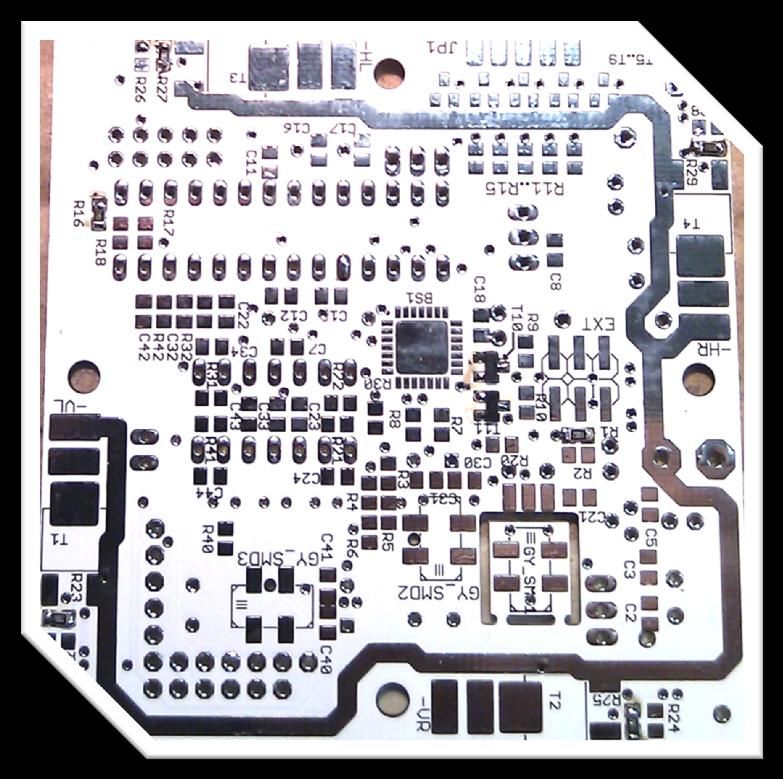
Abb. 7: SMD Platine, unbestückt
3.4 Wii-Lagesensoren extrahieren
Um den Gyrosensor der Wii Motion Plus aus seiner Hülle zu bekommen benötigt man einen
Lötkolben, einen feinen Kreuzschraubendreher und Handschuhe.
Abb. 8: Wii Motion Plus, unverändert
19
19
Tido: „Öffnen des Gehäuses der Wii MotionPlus”,
http://www.qc-copter.de/wiki/index.php?title=Einbau_Wii_MotionPlus, 03.10.2011~ 15 ~
Zuerst müssen die Schrauben der Abdeckung entfernt werden.
Abb. 9: Öffnen der Wii Motion Plus
20
.
Im Folgenden wird die Platine mitsamt Anschlussstecker mit etwas Druck auf die beiden
seitlichen Plastikhalter aus ihrer Hülle entfernt.
Abb. 10: Die Platine
21
20
Tido: „Lösen der Platine aus dem Gehäuse“,
http://www.qc-copter.de/wiki/index.php?title=Einbau_Wii_MotionPlus, 11.09.2011~ 16 ~
So sollten die einzelnen Bauteile aussehen. Benötigt wird nur die Platine in der Mitte.
Abb. 11: Entlöten der Stecker
22
Mit einem Lötkolben erhitzt man die Kontakte auf ca. 380°C und zieht das Kabel hinaus. In
der Praxis haben sich Arbeitshandschuhe als Hitzeschutz (nach zahllosen Verbrennungen)
etabliert. Gleiches gilt für die schwerer zu erreichenden Kabelanschlüsse in der Platinen
Mitte. Wichtig ist, dass alle Kontakte gleichzeitig flüssig werden, damit der Stecker rasch
herausgezogen werden kann. Den Lötkolben sollte man derweil quer halten, es darf auch
ruhig recht straff gezogen werden. Vorsicht! Durch den Kraftaufwand kommt man leicht mit
heißen Teilen oder dem Lötkolben in Berührung (Handschuhe tragen).
3.5 Akku Löten und laden
Die speziellen Lipo (Lithium Polymer) Akkus von SLS (Stephans Lipo Shop) und Hobbyking
Hongkong liefern eine Spannung von 12V und besitzen 3600 mAh an Kapazität. Lipo
Akkumulatoren sind sehr leicht im Vergleich zu herkömmlichen Stromversorgern, sie haben
eine so hohe Entladestromrate, dass man damit schweißen kann und sie werden nicht
durch den sog. Memory-Effekt mit der Zeit schwächer; bleiben also praktisch verschleißfrei.
21
Tido: „Entfernen der Kabel / Flachbandkabel”,
http://www.qc-copter.de/wiki/index.php?title=Einbau_Wii_MotionPlus, 11.09.2011
22
Tido: „Das Flachbandkabel”,
http://www.qc-copter.de/wiki/index.php?title=Einbau_Wii_MotionPlus, 11.09.2011~ 17 ~ Diese vielen Vorteile haben mich bewogen, dieses System zu nutzen und nicht etwa andere Techniken, wie Blei Akkus (Autobatterie) oder Lithium-Ionen-Akkumulatoren. Einige Nachteile sind jedoch ebenfalls vorhanden. So ist der Lipo sehr anfällig für Tiefenentladung. Einmal leer kann er starke Schäden davontragen, gleiches gilt für Überladung. Auch Temperaturen von über 60°C oder unter 0°C sind laut Hersteller zu vermeiden. Zum Aufladen sind spezielle Ladegeräte vorgesehen, die mit dem sog. CCCV- Modus („constant-curent, constant voltage“)23 laden, einem speziellen Verfahren, bei dem durch Konstantstrom und Konstantspannung der Akku schonend auf bis zu 80% Leistung aufgeladen wird. Es ist dann nur noch der breite „Balancer“ Stecker und die Kontakte Plus und Minus anzuschließen. Zur Montage des Akkus kann man Klebeband benutzen, dadurch muss das Bauteil aber nach jedem Laden neu montiert werden. Abb.12: Befestigung des Akkus Besser ist ein stabiler Klettverschluss mit Akku-halte-rahmen (aus Holz oder Kunststoff) zur sicheren Halterung, damit man den Akku zum Laden wieder sauber entfernen kann. Für den Anschluss an die Stromleitungen der Platine ist ein spezieller Stecker notwendig, den man beim Akkustecker anschließen kann. Dieser muss aufgrund der hohen Ströme aus 23 „CCCV (constant current constant voltage)“, http://www.itwissen.info/definition/lexikon/CCCV-constant-current-constant-voltage-IU-Verfahren.ht ml, 20.09.2011
~ 18 ~ Goldkontakten mit einem genügend hohen Durchmesser bestehen. Oft werden schon passende Kontakte mitgeliefert, die dann nur noch anzulöten sind. Platzt ein Lipo Akku auf durch Verformung oder Überhitzung, kann es zu einer Explosion oder raschen Verbrennung kommen, die durch Hinzuführen von Wasser noch verstärkt wird. Der dabei entstehende Rauch ist giftig. Es gibt spezielle Schutztaschen, die auch den giftigen Ruß zumindest teilweise auffangen und somit neutralisieren.24 3.6 Summensignalgeber (QuadroPPM12) mit Empfänger Empfänger von RC-Funk-Systemen haben verschiedene Anschlüsse für bestimmte Kanäle der Fernbedienung. Drückt man den Steuerungshebel nach links, so wird auch eine Verbindung für „nach links“ beim Empfänger aktiviert. Damit man nicht für jedes Steuersignal (links, rechts, steigen, sinken, drehen etc.) einen extra Schaltkreis einbauen muss, wird ein sogenanntes Summensignal erzeugt. Das ist ein einziger Schaltkreis, über den alle Daten gebündelt und digital an die Steuereinheit geschickt werden. Der notwendige Summensignalgeber (QuadroPPM12) ist direkt mit den einzelnen Leitungen de Funk-Empfängers verbunden und kann bis zu 12 Kanäle zu einem zusammenfassen. Theoretisch sind für das Anschließen Steckverbindungen vorgesehen, die Drähte lassen sich aber auch vorsichtig direkt anlöten. Abb. 13: Summensignalgeberplatine auf Funkempfänger 24 Beispiel: Rakkus: „LiPo explosion with / without LP-Guard bag“, http://www.youtube.com/watch?v=d4lNx2Wn6Oc, 20.09.2011
~ 19 ~
Verwechselt man aus Versehen Plus und Minus, so ist das 60€ teure Bauteil sofort
durchgebrannt und der Garantieschutz verfällt! Es gibt keine Garantie bei Verpolung oder
Kurzschluss.
Nach eigener Erfahrung ist die Pinreihe, die am nächsten dem Etikett ist (ganz oben) die
Signalreihe, die Mitte ist Plus (VCC=“Voltage at the Common Collector“) und die unterste
Reihe Minus (GND=“Ground“). Diese Belegung sollte aber vor dem Testen noch einmal
anhand des jeweiligen spezifischen Datenblatt des verwendeten Empfängers überprüft
werden. Der Atmega Mikrochip der QuadroPPM12 hat so viele Kontakte, dass er sich am
besten mit einem SMD-Heißluft Lötsystem einbauen lässt. Gleiches gilt für die anderen
25
SMD Bauteile der QuadroPPM12. Bei erfolgreicher Inbetriebnahme blinkt die SMD-LED
jede Sekunde lang auf. Sobald eine Verbindung mit der Fernbedienung hergestellt wurde,
blinkt die LED sekündlich nur noch sehr kurz und der Empfänger leuchtet kontinuierlich rot.
3.7 Motoren einbauen
Die Antriebsbauteile schlechthin, die Brushless Motoren von Robbe Roxxy werden über
mitgelieferte Schrauben am Alu-Vierkant festgeschraubt. Dafür müssen zwei Löcher für die
Industrieschrauben gebohrt werden, und eine große Aussparung für die Motorwelle. Die
Motorwelle muss sich frei drehen können sonst läuft das System heiß. Da man durch die
erste Schicht und den Boden des Vierkants bohren muss sind die Löcher praktisch nie
übereinander. Ein schwungvolles herumrühren des Akkubohrers verbunden mit drei Lagen
Beilagscheiben lösen das Problem. Bei Robbe ist sogar ein 90° Winkel dabei, der zum einen
als zusätzliche Beilagscheibe fungiert, an dem man aber auch weitere Standfüße
anschrauben kann.
25
Light Emitting Diode= Leuchtdiode~ 20 ~ Abb. 14: Halterung der Motoren Auf die Abstandsscheibchen sollte man nie gänzlich verzichten. Die Befestigungsschrauben dürfen nur um die 1-2 mm in den Motor ragen. Wenn eine Schraube die ungeschützte Spule berührt riskiert man einen Kurzschluss. Die Motorspule kann durch diesen Schaden unter hohem Stromfluss durchbrennen. Bisher sind drei Motoren auf diese Weise verendet, gleichzeitig wurde durch den Kurzschluss die halbe Platine kurz vor der Präsentation in Mitleidenschaft gezogen. Aus diesem Grund sollten bei den Motorreglern die Plus- Leitung gekappt werden. 3.8 Motorregler öffnen/anschließen Der Motorregler steuert die Drehzahl der Motoren und versorgt sie mit Strom. Ein normaler Mikroprozessor kann die erforderlichen Ströme von bis zu 30A allein von seiner Drahtstärke nicht schalten. Aus diesem Grund werden über ein Steuerkabel (3-Adrig) die Drehzahlen an den Regler gesendet, der direkt zwischen Akku und Motor sitzt. Er kann standardmäßig bis zu 50-mal pro Sekunde die Drehzahl ändern. Für ein so zeitkritisches System wie den Quadrocopter ist das zu wenig; er fängt bei Tests an zu trudeln, weil die Steuerung nicht schnell genug gegensteuern kann. Aus diesem Grund muss die Schaltfrequenz auf 500 Hz angehoben werden. Das geht nur durch einen direkten Eingriff in die Software des Reglers; er muss geöffnet und umprogrammiert werden. Es ist ein
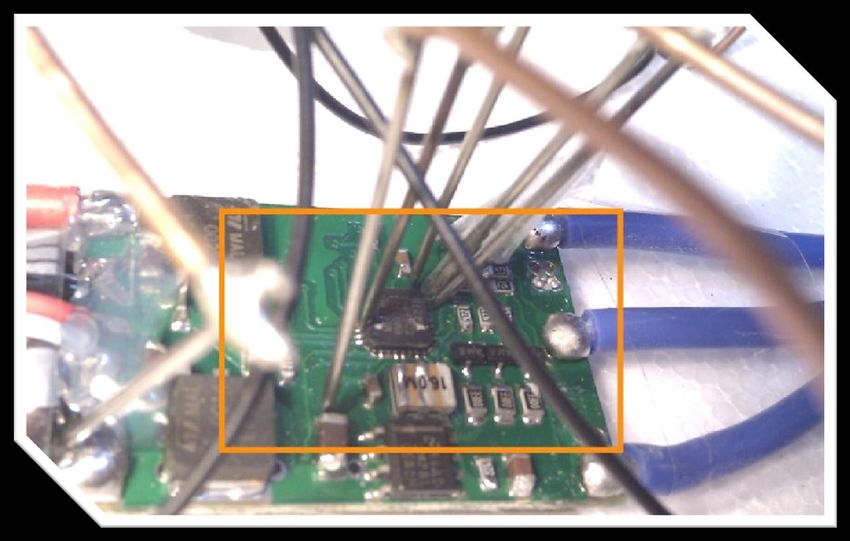
~ 21 ~ Programmiergerät (AVR ISP=In-System-Programmer) sowie ein SMD Lötkolben von Nöten. Eine Beta-Software gibt es für ziemlich jeden Regler im Internet. Dabei verfällt natürlich sämtlicher Garantieanspruch. Theoretisch existieren zwei Möglichkeiten, den Regler umzuprogrammieren. Einerseits die Nadelbrettprogrammierung und andererseits eine direkte Verlötung der Programmierkabel am Mikroprozessor des Motorreglers. Bei SMD Bauteilen fällt die Nadelbrettvariante leider weg, da herkömmliche feine Nadeln (1 cm lang) zu dick sind und immer zwei Pins oder andere Nadeln berühren. Abb. 15: Nadelprogrammierung der Motorregler Nach über fünf Stunden erfolglosen Versuchens empfehle ich die Lötmethode. Vorher muss das Bauteil mit einer Zange von seinem Schrumpfschlauch entfernt werden, damit unter dem wegzubrechenden Kühlkörper (ist nur geklebt) der Mikrochip zum Vorschein kommt. Es müssen die Verbindungen des Programmiergeräts (Ich verwende den AVR USB ISP von Ulrich Radig 26) mit den entsprechenden Kontakten des Prozessors verbunden werden (Eine Anleitung hat „PIEPER“ dazu verfasst27). Die spezielle Firmware 26 Radig, Ulrich: „USB Atmel ISP Programmer“, http://www.ulrichradig.de/home/index.php/avr/usb-avr-prog, 22.09.2011 27 Pieper: „Anleitung für eine Programmmierschnittstelle der Mystery 30 A Brushless-Regler“, http://www.qc-copter.de/wiki/index.php?title=Brushless-Regler, 22.09.2011
~ 22 ~ ist ebenfalls im Internet zu finden28. Nach dem Programmieren wird der Kühlkörper wieder auf den Mystery Regler montiert und das Ganze per Klebeband oder Schrumpfschlauch zusammengebaut, auf dem Quadrocopter aufgeklebt und mit dem Motor verbunden. Für die Platine ist eine eigene Steckverbindung vorgesehen (Polung beachten). Gleichzeitig muss der Stromanschluss mit zwei dicken Kabeln gewährleistet werden. Abb. 16: Wiederverschlossener Motorregler (Isoliert) Falls ein Motor durchbrennt kann durch das 5-Volt Kabel beim Platinenanschluss ein sehr hoher Strom die Platinenbauteile beschädigen. Deswegen sollte man dieses Plus- Kabel vorsichtig abtrennen. Der Regler kann sich seinen Strom auch über die für den Motor vorgesehene 12-Volt Litze beziehen, darum ist diese Sicherheitsmaßnahme kein Problem. 28 „Downloads >> Brushless-Regler“, http://www.qc-copter.de/wiki/index.php?title=Downloads#Brushless-Regler, 22.09.2011
~ 23 ~ 3.9 Kamera installieren Das Auge für spätere FPV Flüge ist eine Farb-Funk Kamera mit TV-Anschluss. Abb. 17: FPV-Kamera Per Adapter lässt sich das Bild am PC anzeigen, dabei nimmt man eine Verzögerung von bis zu 2 Sekunden in Kauf was ein direktes Fliegen nicht möglich macht. Besser ist ein System mit HMD (Head Mounted Display, eine Videobrille), das mit integriertem Empfänger schneller läuft. Mit einer Bohrung durch die Platine ist das Videogerät schnell platziert. Später ist vorgesehen, eine servogesteuerte Schwenkachse unter dem Hubschrauber zu befestigen, um auch nach unten blicken zu können. Wichtig ist, dass die Kamera nicht die gleiche Frequenz wie die Fernbedienung (2,4 GHz) hat, da sie sonst das Signal überdeckt. Selbst W-Lan wird dem Dauersender „Kamera“ nicht Herr. 3.10 LED Stripes Für Nachtflüge werden LED Stripes unten am Alu-Vierkant festgeklebt. Sie brauchen eine Spannung von 12V und können somit gefahrlos direkt an der Akku-Leitung festgelötet werden.
~ 24 ~ Abb. 18: LED Stripes Um die Vorderseite von den anderen Trägerseiten unterscheiden zu können sollte man diese Achse mit blauen LEDs versehen und die Anderen mit Roten. Die Leuchtstreifen müssen parallel geschaltet werden, damit die Spannung gleich bleibt (auf den gebrauchten 12V). 3.11 Fernsteuerung „binden“ „Binden“ bedeutet im Fachjargon, dass die Fernbedienung die ID des richtigen Empfängers erkennt und nur noch mit diesem kommuniziert (bis sie mit einem Anderen verbunden wird). Dafür muss der „Binden“-Stecker und eine Stromversorgung in den Empfänger eingesteckt werden (einfach an einen freien Platz, egal welcher). Nun nimmt man die ausgeschaltete DX6i (die Fernbedienung) zur Hand und hält den „Trainer“ Stecker nach unten gezogen. Beim Einschalten sollte jetzt auf dem Display „Binding“ stehen. Der Vorgang ist abgeschlossen, sobald auf dem Empfänger eine rote LED dauerhaft leuchtet. Im Folgenden zieht man den Binden-Stecker wieder heraus, startet beide Geräte neu und prüft das System auf Funktionalität. Es muss immer zuerst die Fernbedienung gestartet werden und dann der Quadrocopter. Sonst ist man im Config-Modus, der nur dann funktioniert wenn der Computer angeschlossen ist, um Einstellungen vorzunehmen. Ein einfaches Aus-und Einschalten des Fliegers bei gleichzeitigem Anlassen der Fernbedienung löst das Problem. 4 Schwierigkeiten + Lösungen Bei diesem Projekt erlitt jedes Bauteil mindestens einen Totalausfall. Vom Akku, über sämtliche Luftschrauben, 3 Motoren, die Standfüße sowie auch die Hauptplatine . Mehrere Firmen haben sich quer gestellt und einige sehr unangenehme Lern-„Erfolge“ wurden
~ 25 ~ erzielt. Es gilt der Grundsatz: Alles doppelt kaufen und sich vorher über die Händler informieren. 4.1 Fehlende Lieferung Hauptproblem waren schon immer die Motoren. Nach einem Monat des Wartens hat die zuständige Firma, CNC-Modellsport, immer noch kein Zeichen des Lebens von sich gegeben. Zwei E-Mails sowie das offizielle Kontaktformular wurden weder beachtet noch beantwortet. Das eingetragene Telefon war nach Stunden der Warteschleife nach wie vor besetzt und Faxe kamen wieder zurück: „Keine Verbindung“. Die Firma ist dem Internet schon bekannt. Manchmal läuft alles gut, manchmal kommt keine Regung29. Schließlich habe ich den Kauf mit Geld-Zurück Forderung per E-Mail storniert. Daraufhin ließ CNC-Modellsport meine E-Mail international sperren. Jede Organisation, die einen speziellen Firmen Spamfilter hat konnte nicht mehr mit mir kommunizieren (auch nicht mein Arbeitgeber, die Cartesy GmbH). Als Kunde nichts Böses Ahnend ließ ich mir noch zwei Adressen sperren (indem ich eine Mahnung mit Zeitlimit schickte) bevor das Zeichen von meiner Seite aus verstanden wurde. Also habe ich per Telefonat mit der Bank den Bankeinzug zurückgezogen. Am selben Tag noch kamen zwei E-Mails von CNC-Modellsport. Die Erste enthielt die Meldung, „der Auftrag“ sei jetzt in Bearbeitung, die Zweite – und nur eine Sekunde später geschickte – Nachricht beschrieb schon eine Drohung, gerichtlich gegen mich vorzugehen, wenn ich das Geld nicht wieder überweisen würde. Bis heute habe ich nichts mehr davon gehört, abgesehen von der unauffälligen Löschung meines Benutzerkontos dieses Internetshops. Es zahlt sich also aus, seltsam günstige Angebote für Motoren mit Google vorher zu durchleuchten. Wer bei diese Suchmaschine nach „CNC-Modellsport“ sucht findet als zweiten Vorschlag schon die „Probleme mit CNC Modellsport“ – Seite. Außerdem sollten Internet-zahlungen immer mit Bankeinzug oder Paypal getätigt werden. Ersteres kann man nach bis zu 6 Wochen zurücknehmen und Paypal verfügt über einen guten Käuferschutz bei dem der Kaufpreis erstattet wird30. 29 the_fly: „Probleme mit CNC Modellsport“, http://www.rc-network.de/forum/showthread.php/138025-Probleme-mit-CNC-Modellsport, 22.09.2011 30 Paypal: “PAYPAL-Käuferschutz: Sicher Online Einkaufen”, https://www.paypal-deutschland.de/sicherheit/schutzprogramme/kaeuferschutz.html, 22.09.2011
~ 26 ~ 4.2 Programmierung Motorregler Die Motorregler auf die wie vorher schon erwähnten 500 Hz umzuprogrammieren stellte mich vor das Problem, dass die neue Version dieser Mystery Pentium 30A Regler einen sehr kleinen SMD-Prozessor hat. Ursprünglich wird im Internet geraten, eine sogenannte Nadelbrettprogrammierung durchzuführen. Man lötet feine Nadeln an starre Drähte, diese steckt man dann in einen Styropor Korpus, sodass sich die Nadeln durch Biegen der Drähte auf Bruchteile von Millimetern genau bewegen lassen. Danach lötet man an jede Nadel ein Programmierkabel des ISP Steckers. Nun muss man nur noch die Reglerplatine festkleben und die Nadeln auf die zugehörigen Pins biegen. Insgesamt ist also eine Verbindung zwischen ISP Stecker (Programmiergerät) und dem Mikrochip hergestellt. Soweit die Theorie. Nach einigen Versuchen stellte sich heraus, dass diese Methode veraltet ist. Für SMD Bauteile muss eine direkte Lötung der Programmierkabel an den Atmega erfolgen. Die genauen Anschlüsse finden sich im Datenblatt von Atmel31 (auf S.2 die „MLF Top View“). Dafür einen winzigen Tropfen Lötzinn auf die SMD Lötkolbenspitze geben, diesen mit einem kurzen Antippen auf den Pin-Anschluss des Controllers geben. Jetzt kann ein vorverzinnter feiner Kupferlackdraht durch einen kurzen Kontakt angelötet werden. Die Hitze sollte nicht über 350°C gehen. Langes Erhitzen des Prozessors führt zu dessen vorzeitigem Ableben. Sind alle Drähte verlötet, muss die Software „AVR8 Burn-O-Mat“32 gestartet werden. In dem Feld „AVR type“ muss der richtige Mikroprozessor „ATmega328P“ ausgewählt werden. Danach können die sog. „Fuses“ ausgelesen werden (Fuses sind die Grundeinstellungen des Chips. Z.B. kann man durch eine Fusebiteinstellung einen Mikroprozessor aus Datenschutzgründen unprogrammierbar machen oder auch die Taktfrequenz ändern. Falsche Einstellungen lassen sich u.U. gar nicht mehr rückgängig machen). Im Burn-O-Mat muss bei der Meldung: „Fuses successfully read“ jetzt die Beta-Software33 geladen werden, die dann per „Write“ in der Rubrik „Flash“ auf den Chip geladen wird. Wenn im Internet bei dieser Firmware oft die Rede von „Quadrocontrol II/XS“ die Rede ist muss einen das nicht verwirren; das Programm läuft auch auf der QC III, da es von der verwendeten Platine unabhängig ist. Es beschleunigt nur die Reaktionszeit des Reglers. Als letzter Schritt muss das System wieder mitsamt Kühlkörper und ohne die Programmierdrähte versiegelt werden. Dazu nimmt man entweder Klebeband oder einen 31 Atmel: „Datasheet“, http://www.atmel.com/dyn/resources/prod_documents/doc2486.pdf, 25.09.2011 32 Torsten Brischalle: „AVR8 Burn-O-Mat: eine grafische Oberfläche für avrdude“, http://avr8-burn-o-mat.aaabbb.de/, 25.09.2011 33 „Tido“ und „Quax“: „Mystery FM30A Regler mit PPM für QuadroControl II/XS“, http://www.qc-copter.de/forum/viewtopic.php?f=8&t=560, 25.09.2011
~ 27 ~
großen Schrumpfschlauch. Somit ist das Gerät bereit an Motor und Platine angeschlossen
zu werden.
4.3 Spannungsregler zu heiß
Ein eher unscheinbares Problem, das aber geradezu symbolisch für andere Bauteile steht
war der heiß laufende Spannungsregler. Der kleine Kühlkörper hat sich vor allem mit
Kamerabetrieb, Satellitenempfang und der Platine stark erhitzt.
Abb. 19/20: Kühlkörper des Spannungsreglers
Um seine Lebenszeit zu erhöhen wurde mit speziellem
Metallkleber ein großer Kühlkörper aus einer
Altbauteilsammlung montiert. Entsprechende Hardware gibt es auf jedem Wertstoffhof oder
Elektronikreste Laden. Auch Pollin bietet Sortimente34 in diese Richtung an.
4.4 Beschaffung Spezialelektronik
Häufig sind Einzelteile nicht, oder kaum erhältlich. So auch der LP 2950 ACZ3,0V
Spannungsregler. Dieses Schlüsselbauteil, das die Lagesensoren der Wii mit Strom
versorgen soll war über Monate nicht mehr verfügbar. Selbst ein alternativer 3,0V
Spannungsregler von Reichelt (LP 2950 CZ3,0V) war ausverkauft. In diesem Fall hilft nur
34
Pollin: “Kühlkörper”,
http://www.pollin.de/shop/dt/ODM5OTkxOTk-/Bauelemente_Bauteile/Sortimente/Mechanische_Bau
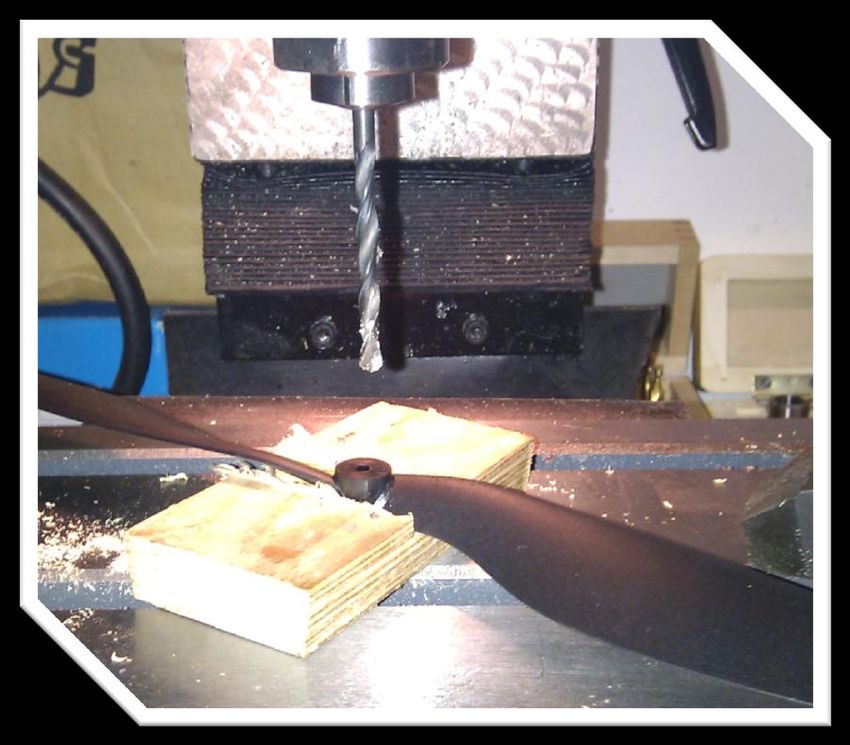
teile/Kuehlkoerper.html, 25.09.2011~ 28 ~ das Bestellen über eine Firma, die Zugriff auf Großhändler hat. Mein Dank gilt der Cartesy GmbH aus Mühldorf durch die der Einkauf möglich wurde. Allerdings ist bei einem Test der Spannungsregler durchgebrannt und es war auch kein weiterer mehr verfügbar. Dadurch wurde ich gezwungen eine Diode mit einem 3,3V Bauteil zu verbinden. An der Diode fallen ca. 0,2V ab. Ein Test der Lagesensoren bestätigte: auch diese provisorische Methode lässt sich perfekt anwenden. Allerdings läuft alles seltsamerweise auch ohne die Diode einwandfrei. 4.5 Motoraufnahme zu groß ( 5 mm statt 3) Als endlich Motoren und Luftschrauben auf dem Tisch lagen wurde nach einigem Probieren ein weiteres Problem sichtbar. Die Motoraufnahme war für die kleinen Haltelöcher der Propeller um 2 mm zu groß. Schuld daran war die fehlende Angabe beim Verkäufer (Conrad Onlineshop). Um die Komponenten doch noch irgendwie miteinander kompatibel zu machen, wurde erst eine Fräße eingesetzt. Die verwendete Heimfräße hatte aber keinen Zentrierer. Folglich war das neue Test Loch um einen Millimeter versetzt. Dadurch bekommt die Luftschraube Unwucht und zittert für unsere Zwecke zu stark für stabiles Fliegen. Was dann die erwarteten Resultate gebracht hat, war ein einfacher Akkubohrer. Durch die spitz zulaufenden Bohraufsätze zentriert sich der Bohrer selbst und das neue Loch sitzt perfekt mittig. Am besten versucht man gleich passende Motor-Luftschrauben Kombinationen zu finden.
~ 29 ~ Abb. 21: Bohrversuche mit der Fräße 4.6 Motorschrauben zu tief Der teuerste Fehler mit den größten Nachwirkungen passierte beim Montieren der Motoren. Robbe hat seinen Außenläufern ein Befestigungsset mitgegeben. Die beiliegenden Maschinenschrauben kommen direkt an und in das Gehäuse der Elektromotoren und können u.U. auch die Spulen von unten her berühren. Sind die Befestigungen zu weit im Motor kann das auch eine Motorspule beschädigen. Bei großen Strömen wird durch die jetzt fehlende Isolationsschicht des Spulendrahtes ein Kurzschluss verursacht. Hoher Strom entsteht, der über die Reglerplatine eine Art Rückkopplung auf die QuadroControl III Steuerung auslösen kann. Folglich brennen einige Bauteile durch (wie hier z.B. der ACZ 3,3V Spannungsregler) und der Motor verliert einige Spulen; er wird langsamer. Wenn der Kurzschluss anhält, kann das zu einer starken Erhitzung und u.U. dem beschädigen oder Explodieren des Akkus führen. Es gilt also unbedingt zu beachten, dass die Spulen nicht berührt werden, auch wenn der Hersteller derartige Halterungen entworfen hat. Ein Paar Unterlegscheiben haben das Problem vorerst gelöst, Zwei Motoren sind jedoch durchgebrannt und werden eingeschickt, dennoch ist Insgesamt ein Schaden von über fast 50€ entstanden.
~ 30 ~ 4.7 Motoren falschherum Beim ersten Test – es drehte sich ein Motor nach oben genanntem Defekt nur noch langsam - lief eine Achse stabil, die Andere versuchte anstatt gegenzusteuern eher das Umkippen sogar noch zu verstärken. Das passiert dann, wenn ein Regler verkehrt herum angeschlossen ist. Man kann an der Platine die für den Motor bestimmten Plus- und Minusdrähte direkt vertauschen und dadurch die Drehrichtung des Elektromotors ändern. Einen solchen Defekt merkt man, indem man einen der Trägeräste in Richtung Boden beschleunigt (den Hubschrauber dabei mit leichtem Standgas über dem Kopf halten). Jetzt sollte der Motor, der nach unten bewegt wird, schneller drehen und der gegenüberliegende langsamer. Außerdem müssen auf allen linksdrehenden Motoren auch links-hebende Luftschrauben angebracht sein. Man beachte dazu noch einmal das Bild auf Seite Eins. A und C sind linksdrehend, während B und D rechtsdrehend sind. Ein rechtsdrehendes Rotorblatt erkennt man daran, dass die vordere Kante (des Propellers) oben sein muss, wenn man den Motor in seine angestammte Richtung dreht. 4.8 Funk-Empfänger defekt Durch sog. Verpolen kommt es häufig zu einem Defekt beim Funk-Empfänger. Ich empfehle grundsätzlich die Fernbedienung aus Deutschland und den Empfänger aus Hongkong von Hobbyking35 zu kaufen (für 10€ statt 54€36). Dadurch, dass man die Kontakte selbst anlöten oder einzeln anstecken muss, verwechselt man schnell Plus und Minus und der Empfänger ist zerstört. Die Garantie greift hier nicht. Ein kaputtes Gerät erkennt man daran, dass es weder grün, noch rot blinkt, also bei Stromanschluss keinerlei LEDs mehr leuchten. Es kann vorkommen, dass die Leuchtdioden noch an sind, obwohl das Bauteil schon verpolt wurde. Nach einmaligem An- und Ausschalten ist auch dieses letzte Lebenszeichen erloschen. 4.9 Akku ausgebeult Wenn der Akku zu stark belastet wird, wie bei dem Problem mit den Motoren („4.6 Motorschrauben zu tief“) kann der Lithium-Polymer Akku anfangen sich aufzublähen während er rapide an Leistung verliert. In dem Fall muss er sofort entfernt und eingeschickt werden. (Vorher den Service kontaktieren). 35 „OrangeRx R410 Spektrum DSM2 Compatible 4Ch 2.4Ghz Receiver”, http://www.hobbyking.com/hobbyking/store/uh_viewItem.asp?idProduct=11972, 26.09.2011 36 „Spektrum AR600 DSM2 DSMX 6 Kanal Micro Empfänger“, http://www.amazon.de/Spektrum-AR600-Kanal-Micro-Empfänger/dp/B00476AUEO/ref=sr_1_1?ie= UTF8&qid=1317055660&sr=8-1, 26.09.2011
~ 31 ~ Abb. 22: Ausgebeulter Lipo Lipos können sehr rasch verbrennen, wenn sie z.B. erst überladen und dann kurzgeschlossen werden. Der Diplom Informatiker Thomas Pfeifer meint dazu bezeichnend: „Selbst 10 Minuten nach der Explosion hat der Akku immer noch eine Außentemperatur von 137.7°C“ 37 . Es gibt spezielle Schutztaschen zum Aufbewahren der Akkumulatoren 38 . Diese halten nicht nur das Feuer und die Temperatur, sondern auch den hochgiftigen Rauch zurück. So treten „Giftige Gase“39 aus die sich in den Wohnungswänden festsetzen können. 4.10 Akku Einzug durch Zoll Durch die Einkäufe im Ausland gibt es Probleme mit der deutschen Zollbehörde. Je nach Ware fallen beim Einzug des Zolls verschiedene Gebühren an, sobald der Bestellwert über 22€ liegt. Für Privatgeschenke liegt die Zollgrenze bei 45€. Innerhalb der EU ist generell bei Elektronikteilen kein Zoll fällig (anders als bei Zigaretten oder Alkohol40). Meist liegen die Kosten im Bereich von ca. 10 Prozent. Zusätzlich kommt außerhalb der EU die Mehrwertsteuer dazu (19 Prozent). Hat der Verkäufer den Kaufpreis auf unter 22€ datiert bekommt man einen Brief, der besagt, dass die Ware im Zollamt abzuholen sei, in welchem man sich für das Vergehen „rechtfertigen“ muss (eine Unterschrift tätigen). Diese kann überall in Deutschland liegen - eine Anreise wird oft teuer. Handelt es sich um ein gefälschtes Produkt, so kann der Markeninhaber klagen. Oft einigt man sich aus Kostengründen, das Packet zu vernichten, dann ist theoretisch eine Schadensersatzforderung an den Verkäufer möglich. Außerdem gibt es eine Art schwarze Liste von Produkten, die nur von bestimmten Firmen in Deutschland vertrieben werden 37 Pfeifer, Thomas: „Lithium-Polymer Akku Explosion“, 26.09.2011 38 „Lipo-Bag Lipo-Safe groß“, http://shop.lipopower.de/Lipo-Bag-Lipo-Safe-gross, 26.09.2011 39 Pfeifer, Thomas: „Lithium-Polymer Akku Explosion“, 26.09.2011 40 Steuern und Zollu7nion: „Verbrauchsteuern auf Alkohol, Tabak & Energie“, http://ec.europa.eu/taxation_customs/taxation/excise_duties/index_de.htm, 26.09.2011
~ 32 ~ dürfen (die sich die Rechte am Verkauf gesichert haben). Bestellt man eigenmächtig direkt vom Hersteller, wird die Ware beschlagnahmt. Das Geld sieht man nicht wieder. Oft steht auf diesen Artikeln im Onlineshop jedoch schon vermerkt: „for sale and use only in USA“. Mehr dazu und Tipps für den Auslandseinkauf gibt es auf der Homepage der Stiftung Warentest41. 4.11 Kamera stört Fernbedienung Sobald die Kamera den Videoempfänger erreicht hat ist der Netzwerkverkehr so groß, dass sämtliche W-Lans, Handys und auch die Funk-Fernbedienung von Spektrum restlos die Verbindung verlieren. Der Fehler liegt in der Frequenz von 2,4 GHz. Will man ein FPV System realisieren braucht man unterschiedliche Frequenzen. Am besten 5,8 GHz für die Kamera, denn je höher der Takt, desto weiter die Reichweite (weil die natürlichen - störenden - Wellen sehr niedrige Frequenzen im Megahertz Bereich haben). Leider wird mit zunehmender Frequenz die elektromagnetische Strahlung zunehmend dem sichtbaren Bereich des Lichtes ähnlicher. Schon kleine Hindernisse können die Signale abschirmen. Professionelle FPV Flieger raten oft dazu, für die Fernbedienung die alten Frequenzen von 35/40 MHz zu verwenden um eine Funk-Kamera einzusetzen, es gibt aber auch spezielle Verfahren für den höherfrequenten Bereich42. 4.12 Steuersoftware stürzt ständig ab Nach einiger Malträtierung des Bords begann die ganze Maschine bei jeder Erschütterung neu zustarten. Ein Wackelkontakt des stark malträtierten Haupt-Spannungsreglers (5V) ließ die Stromzufuhr bei Erschütterungen versiegen. Es genügte da bereits der Ruck des abhebenden Geräts, um die Motoren ausfallen zu lassen. Im Detail war direkt ein Leiterkontakt auf der Platine beschädigt. Lösung bringt da nur großzügig aufgetragenes Lötzinn für eine direkte Kontaktwiederherstellung von der Oberseite der Platine hin zur verdeckten Unterseite. 4.13 Quadrocopter Kreiselt in der Luft Dreht sich der Hubschrauber um seine Y-Achse („Gier“-Achse), so stimmt etwas mit dem Gyrosensor nicht. Einer Kreiselbewegung muss sofort gegengesteuert werden. Es kann 41 „Wann der Zoll zuschlägt“, http://www.test.de/themen/steuern-recht/meldung/Online-einkaufen-Wann-der-Zoll-zuschlaegt-1504 289-2504289/, 26.09.2011 42 „2,4 GHz RC-Anlagen und Betrieb mit FPV“, http://fpv-community.de/wiki/index.php?title=2%2C4GHz_RC-Anlagen_und_Betrieb_mit_FPV, 26.09.2011
~ 33 ~ aber passieren, dass das Steuerungsprogramm anstatt sich zu stabilisieren, eine Kreiselbewegung noch verstärkt. In diesem Fall wird die Drehung gespiegelt aufgenommen. Eine einfache Einstellung in der Software unter „Gyrosensors“ -> „invert gier“ behebt dieses Problem. 5 Erster Flug Der Erste Flug war noch kurz vor Abgabe dieser Seminararbeit. Es ist ja ziemlich jedes erdenkliche Bauteil mindestens einmal ausgefallen auf dem langen Weg zum Hauseigenen RC-Hubschrauber, was den Zeitplan stark durcheinander gebracht hat. Einen Hubschrauber absturzfrei in den Himmel zu bekommen (und heil wieder auf die Erde) erfordert ein erhebliches Maß an Fingerspitzengefühl. Als erste Disziplin gilt es, das Luftgefährt auf einer Stelle schweben zu lassen. Das ist auch die Grundvoraussetzung für eine sichere Landung. Mit Bewegung des Gas-hebels nach rechts-unten kalibrieren sich die Sensoren. Bewegt man nun den Hebel nach rechts-unten, so starten die Motoren langsam. Ein nach oben bewegen erhöht den Schub, bis die Schwerkraft schließlich überwunden wird. Nach einigen Tests ist das Flugzeug leider mit seinen letzten Rotorblättern in eine Hauswand geflogen, wodurch ein Landefuß und eine Luftschraube abgebrochen sind. Nicht ohne Grund gibt es professionelle Fluglehrer für diese Geräte43. 43 Lutz, Markus: “RC-Video-Tutorial”, http://www.rc-video-tutorial.com/verschiedenes/quadrokopter-flugschule/, 02.10.2011
~ 34 ~ Abb. 23: Schäden durch Flugunfälle 6 Tests und Verbesserungen Ein derartiges Projekt ist natürlich niemals fertig. Es soll weitere Sensoren bekommen und auch über GPS an einer bestimmten Position warten können. Ein abkoppelbares Landfahrzeug, das eine Steckdose zum Aufladen findet, sowie Lautsprecher und W-Lan-Erkennung für Internet und Programmierung über Bluetooth (das BTM-222-Modul) waren weitere Ideen, die auf die Schnelle nicht umsetzbar waren. Dennoch gibt es auch im bestehenden Objekt noch ein paar Verbesserungen. Diese sind hier kurz überrissen. 6.1 Kostensparen Wesentlich verbessert werden muss das Preis/Leistungsverhältnis. Man hätte das Meiste aus dem Ausland für unter die Hälfte des Preises bekommen und einige Module, wie die Robbe-Roxxy 2824 34 Motoren sind in Deutschland einfach überteuert. Da ich im Nachhinein einige schöne und günstige Online-Shops gefunden habe wird das nächste Projekt wohl günstiger ausfallen.
~ 35 ~
6.2 Form
Die verwendete Karosserie bzw. das Trägersystem ist zwar weit verbreitet, da sie so robust
ist, das nächste Modell bekommt jedoch eine optische Aufwertung. Viele Bekannte
verwechseln das Modell gerne mit einem Außerirdischen Raumschiff, wenn es blinkend am
Himmel fliegt. Also soll es auch am Boden futuristisch und zukunftsweisend aussehen. Mit
Karbonfasern und Fieberglas, aber auch Styropormäntel lässt sich mit einigem Aufwand ein
individuell hochwertiges Fluggefährt herstellen, dass zusätzlich besser Regen- und
Stoßgeschützt sein soll
7 Zukunftsausblick
In Zukunft sind fliegende Autos wie das serienreife Skycar von Moller44 basierend auf dem
Quadrocopter-Prinzip denkbar. Allerdings sind aktuelle Ansätze noch zu laut und unsicher
in einem fließenden Verkehr.
Abb. 24: Möller Skycar
45
Außerdem schätzt die „Daily Mail Online“ die Kosten für ein solches Gefährt auf ca eine
halbe Million Dollar ($500.000)46.
44
“WELCOME TO MOLLER”, http://www.moller.com/, 01.10.2011
45
“Moller Skycar”, http://www.technovelgy.com/ct/Science-Fiction-News.asp?NewsNum=2015,
03.10.2011~ 36 ~ 8 Resümee Zusammenfassend kann ich den Bau eines Quadrocopters oder einer anderen RC Drohne („Remote Control“ = Ferngesteuert) stark empfehlen. Man baut Kontakt zu Firmen wie der Cartesy GmbH oder der Sherpa GmbH aus Mühldorf auf und lernt einmal was es heißt, etwas Theoretisches praktisch umzusetzen, lernt, dass es eben nicht einfach konstruierbar ist, sondern Wochen und Monate dauert (...oder Jahre), jedes Detail auszuarbeiten, auf das Gewicht zu achten, sich in die Funktechnik einzuarbeiten und über Löt- und Mikroprozessortechnik schließlich ein Leistungsfähiges Fluggerät zu bauen, bis das Gerät endlich kurz abhebt. Selbst auf internationales bzw. lokales Recht, korrupte Versandhäuser und fehlerhafte Datenblatt Angaben mit fatalen (teuren) Folgen muss geachtet werden. Wer einmal ein derartiges Projekt vollbracht hat, braucht bei kaputten Haushaltsgeräten keinen Handwerker mehr. Großen Dank spreche ich auch dem Mitarbeitet der Cartesy GmbH Florian Eberl aus, der mich seine sehr umfangreiche, mit High-Tech Fräße, Heißluft Lötstation und viel Panzerband ausgebauten Werkstatträume nutzen ließ, Danke. Abb. 25: Fertiger Quadrocopter mit Schutzdose 46 Bates, Claire: “What a way to fly! Avoid the traffic with a Skycar”, http://www.dailymail.co.uk/sciencetech/article-1088843/What-way-fly-Avoid-traffic-Skycar.html, 01.10.2011
~ 37 ~ 9 Eidesstattliche Erklärung Ich versichere, dass ich die vorliegende Seminararbeit selbstständig verfasst und keine anderen als die angegebenen Hilfsmittel benutzt habe. Alle Stellen, die dem Wortlaut oder dem Sinn nach anderen Texten entnommen sind, wurden unter Angabe der Quellen nachgewiesen. Dies gilt auch für Zeichnungen, bildlichen Darstellungen, Tabellen und dergleichen. Altötting, den Unterschrift
Sie können auch lesen