Tc-robotics Roboter-Hersteller Unterschiede 2 - Software zur Simulation - TCR-BOX
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
tc-robotics
Roboter-Hersteller Unterschiede 2
Software zur Simulation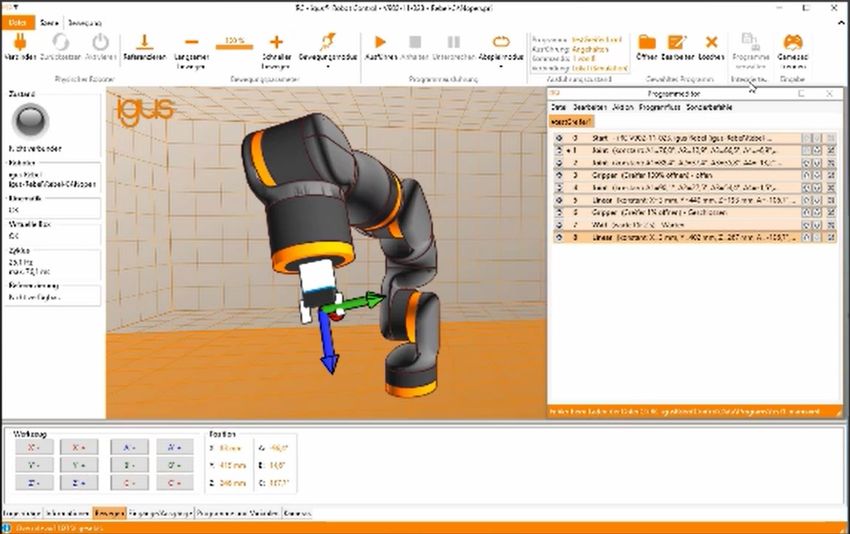
Verfasser: tc-robotics Version: V01.02 Tel: + 49 (0)173 444 0771 www.tc-robotics.de
Arbeitsablauf
Der Arbeitsablauf ist die zeitliche Abfolge verschiedener Tätigkeiten, um eine bestimmte
Aufgabe zu erfüllen. Die einzelnen Arbeitsschritte werden in eine sinnvolle Reihenfolge
eingeteilt, damit eine Arbeit schnell und rationell ausgeführt werden kann.
CAD-Konstruktion, 3D-Simulation, OLP Programmierung und SPS-Programmierung sind
Prozessschritte im Engineering, die sich interdisziplinär miteinander verknüpfen lassen.
CAD-Konstruktion
3D-Simulation
OLP Programmierung
Steuerungstechnik
Damit wird das kollaborative Engineering möglich, da vom CAD-Modell bis zur getesteten
Anlage mit der Simulation als Bindeglied ganzheitliche Analysen vom Steuerungsentwurf
bis zur HIL-Einbindung und Programmierung von realen Steuerungen realisierbar sind.
Daten birgt noch weitere Vorteile. Zunächst bleiben Konstruktion und Simulation direkt und
ohne Zusatzaufwand miteinander verknüpft, damit man stets den aktuellen
Entwicklungsstand der Anlagen simuliert.
3D-Simulation
- Erstellen eines neuen Robotersystems
- Erstellen eines neuen Robotersystems aus einem
Backup
- Ändern eines bestehendes Robotersystems
- CAD Daten
- Kinimatisierung
- Anlagenplanung
- Erreichbarkeitsuntersuchung
- Kollisionsuntersuchung
- Ablaufplanung
- Erzeugen von Layout
o Kinimatisierung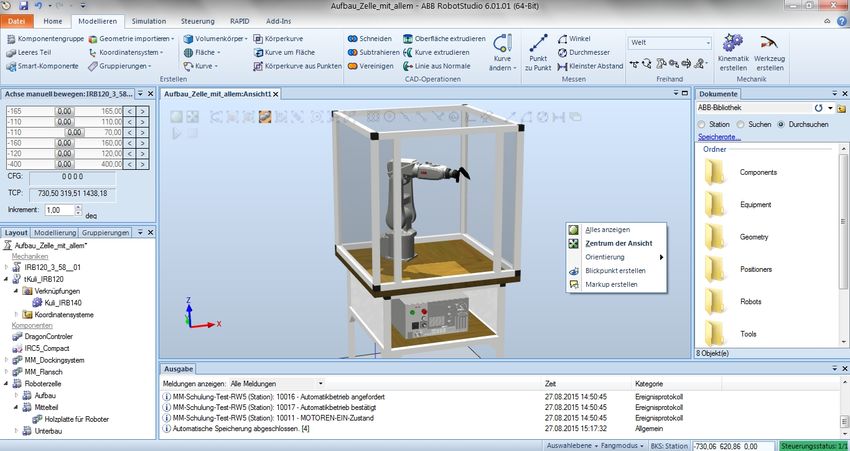
Software Information
Bibliotheken, Geometrien und CAD-Dateien:
Bei den Objekten, die Sie in eine Station importieren, kann es sich um Geometrien oder
Bibliotheken handeln.
- Geometrien sind CAD-Dateien, die beim Import in die Simulationstool-Station kopiert
werden
- Bibliotheken sind Objekte, die von Simulationstool als externe Dateien gespeichert
wurden
Simulationstool ist eine PC-Anwendung für die Modellierung, Offline-Programmierung und
Simulation von Roboterzellen.
Das ursprüngliche 3D-CAD-Format von Simulationstool ist SAT.
Simulationstool unterstützt auch andere Formate, für die jedoch eine Option benötigt wird:
- .3ds
- .sat, .sab, .asat, .asab
- .model, .exp, .session
- .CATPart, .CATProduct, .CGR, .3DXML
- .dae
- .dxf, .dwg
- .igs, .iges
- .ipt, .iam
- .obj
- .prt, .prt.*, .asm, .asm.*
- .par, .asm, .psm
- .sldprt, .sldasm
- stp, step, p21
- stl
- wrl, vrml, vrml2
- vda, vdafs
- .x_t, .xmt_txt, .x_b, .xmt_bin
- .ldr, .ldraw, .mpd
- .jt
- .ipt, .iam
- .x
- .fbx
Welche Daten werden von Kunden benötigt und in welcher Qualität müssen die Daten
vorliegen:
- CAD Daten von Kunden werden benötigt (Gesamte Anlage, Werkzeuge, Technische
Zeichnungen, Abmessungen, Gewicht, Massenschwerpunkt, Aufnahmen von realer
Anlage, Abhängigkeit von Achsen, )
- Step Format für CAD Daten werden im allg. bevorzugt.
- Bei anderen Formaten muss man Test-Import in Simulationstool durchführen.
Konstruktion Der Anfang einer Konstruktion ist oft eine Skizze auf Papier und endet heutzutage meist in einem detaillierten CAD-Modell, welches anschließend auf einer Technischen Zeichnung abgebildet und mit allen Informationen für die Fertigung versehen wird. Während diesem Vorgang ist permanent darauf zu achten: - Richtiges Fertigungsverfahren - Passende Werkstoffauswahl - Maßtoleranzen und Passungen - Form- und Lagetoleranzen - Oberflächengüten Für eine Simulation (bzw. spätere VIBN) sind jedoch nicht immer alle Detailierungsgrade der einzelnen Bauteile erforderlich, wie z. B. für eine Technische Zeichnung. Geometrien, welche nichts mit dem relevanten Arbeitsprozess zu tun haben, können oder müssen z. T. reduziert (Entfernung oder Vereinfachung der Geometrie) werden, um das PC-System nicht aus- oder überlasten. Beispiele hierfür sind: - Bohrungen - Schrauben, Muttern - Fasen - Rundungen - Körper innerhalb einer Geometrie (z. B. Kabel) - Komplexe Geometrien (z. B. Lüftungsgitter) Somit müssen die CAD-Daten unmittelbar nach dem Dateneingang geprüft werden auf: - Dateiformat - Datenvolumen - Detailliertheit - Abmessungen (z. B. falscher Maßstab)
Falls die Daten selbstständig reduziert werden müssen, werden die nicht nötigen Geometrien
entfernt oder die Baugruppen zu einem einzelnen Element konvertiert. Wichtig hierbei ist,
dass nur ein Koodinatenursprung existiert!
Anschließend erfolgt ein Export der CAD-Daten das entsprechendes CAD-Dateiformat für die
Simulation.
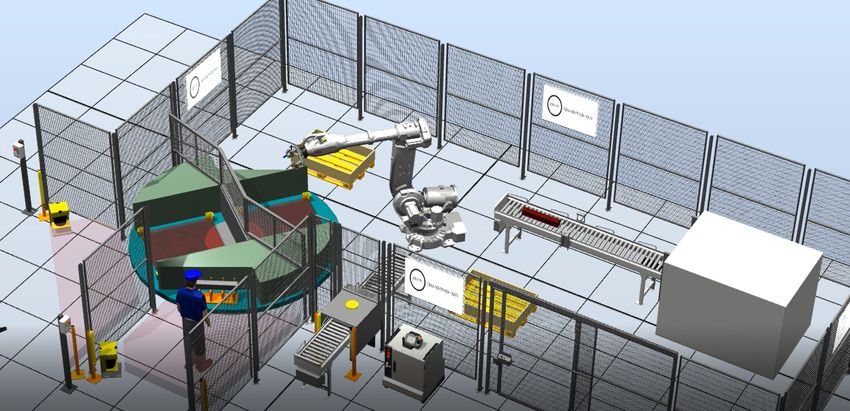
Simulation
Mit der CAD Simulation können wir alle statische CAD Konstruktionen beleben, sie
punktgenau steuern und z.B. nach möglichen Kollisionen und Freiräume prüfen.
Nach dem Import werden die CAD Geometrien vereinfacht und auf kleinere selbständige
Einheiten aufgeteilt. Die Drehachsen und lineare Tracks werden mit so genannten frei
steuerbaren Gelenken im Simulationsprogramm ausgestattet. Diese können dann nach
Wunsch z.B. nach einem Signaleingang vom Roboter aktiviert werden.
Robotersystem virtuell
- Erstellen eines Robotersystems:
Simulationstool mit integrierter Steuerungslogik
Robotersystems aus einem Backup ladbar
Bahnplanung und Verhalten wie realer Roboter
Programmiersprache und Syntax des Herstellers
Simulationswerkzeuge der Hersteller
Ziele der Simulation
Ziel einer Simulation ist es einige Szenarien im Voraus zu entdecken, zu lösen und das
komplette Projekt abschätzen zu können. Eine Simulation wird darin unterschieden, dass
hier kein Programm erzeugt wird, welches man später in den realen Roboter einspielen
kann. Im Gegensatz zu einem Offlineprogramm reden wir bei einer Simulation lediglich von
einer vorab Prüfung, mit beweglichen Bildern für das menschliche Auge. Die Simulation
basiert hauptsächlich nur auf Achsparametern und den gelieferten CAD-Daten.
Die Simulation prüft anhand der 3D Daten die Aufstellung der Anlagenkomponenten, stellt
die Zugänglichkeiten und Erreichbarkeiten von Roboterpositionen sicher, optimiert den
Anlagenaufbau in der 3D Welt und überprüft das Anlagen-Layout.
Datenausgang ist eine untersuchte und geprüfte für OffLineProgrammierung (OLP)
verwendbare Simulationszelle.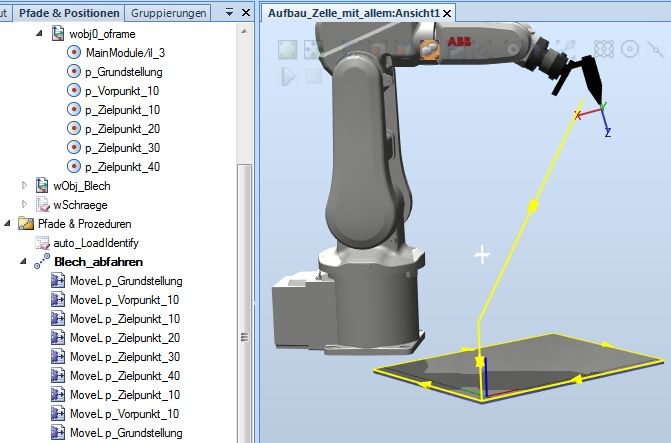
Die Simulation soll im Voraus folgende Punkte prüfen: • Machbarkeit • Erreichbarkeit • Kollisionsfreiheit • Taktzeitprüfung (+/- 20% zur Realität) • Singularität ausschließen Die Machbarkeit beinhaltet lediglich eine Prüfung für den Aufbau einer Zelle. Hier wird geprüft, ob der Aufbau der Zellen wie geplant überhaupt realisierbar ist. • Roboterhersteller/-modell • Werkzeuge • Konstruktion/Planung der Zelle • Schutzumhausung Bei der Erreichbarkeit wird, wie der Name bereits sagt, die Erreichbarkeit des Roboters an seine Positionen geprüft. Eine Freigabe der geplanten Zelle ist hiermit jedoch noch nicht erfolgt. Mit Durchführen der Erreichbarkeit wird auch zeitgleich eine Kollisionsfreiheit geprüft. Damit wird eine Prüfung vorgenommen, ob der Roboter frei beweglich ist oder ob in der Planung/Konstruktion etwas abgeändert werden muss.

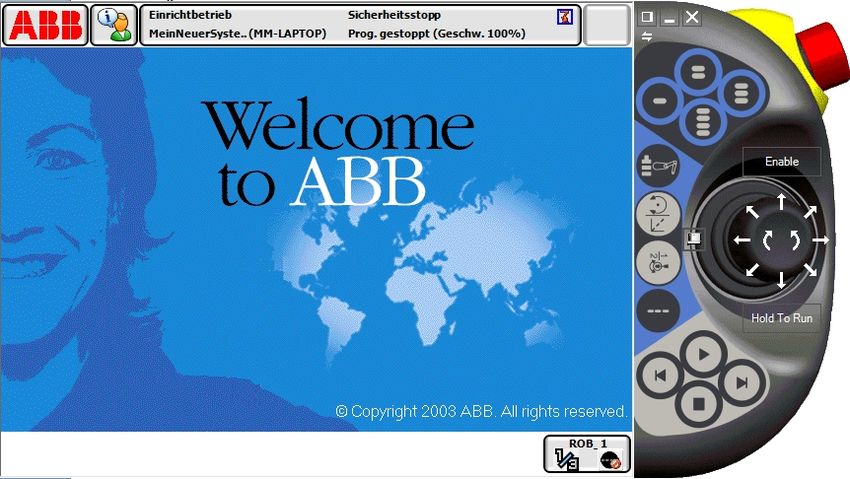
Die Simulation ist somit ausreichend für eine grobe Vorhersage, jedoch keine verbindliche Aussage über Taktzeit oder Ablauf. Zudem ist die Simulation die Grundlage für eine Offlineprogrammierung. Steht das Gerüst einer Simulation (die CAD-Welt), so kann hier die Offlineprogrammierung im Nachgang stattfinden, welche den Aufwand bei der späteren Inbetriebnahme ggf. kürzt. Der Ausgleich von der Simulationswelt zur Realität wird dann bei der Inbetriebnahme mit einer ordentlichen Vermessung der Vorrichtung ausgeglichen. Hierfür werden Kalibrierbohrungen benötigt. Um zu gewährleisten, dass Konstruktion, Simulation und Realität einstimmig und transparent sind. Geprüft wird das Ganze korrekter weise im Messlabor mit dementsprechenden Messprotokollen/-schildern. Simulationstool ABB - RobotStudio Fast jeder Roboterhersteller bietet eine virtuelle Umgebung für seine Roboter. Bei ABB heißt das, sehr umfangreiche Simulationsprogramm, Robot Studio. Mit Robot Studio kann eine offline Simulation basierend auf CAD-Daten erfolgen, sowie auch eine Onlineprogrammierung direkt am realen Roboter. ABB RobotStudio bietet verschiedene Möglichkeiten die virtuelle Welt aufzubauen. Der Aufbau von RobotStudio basiert auf Windows und ist daher recht einfach zu bedienen.
Habe ich eine Robotersteuerung in meiner virtuellen Welt hinzugefügt, so kann ich den virtuellen Roboter mit einem virtuellen FlexPendant, wie in der Realität steuern. Simulationstool Fanuc - Roboguide Das Simulationstool von Fanuc heißt RoboGuide. Auch hier kann eine offline Simulation basierend auf CAD-Daten erstellt werden. RoboGuide bietet verschiedene Module an um beispielsweise Handling-, Schweiß- oder Lackieraufgaben zu simulieren. Zusätzlich können Signale und Variablen benannt werden und Maschinencode in lesbaren Code umgewandelt werden.
Auch in RoboGuide kann die virtuelle Welt aufgebaut werden. Optisch und von der Bedienung ist es anders aufgebaut wie RobotStudio. In RoboGuide kann der Roboter über das iPendant wie in der Realität bewegt werden.
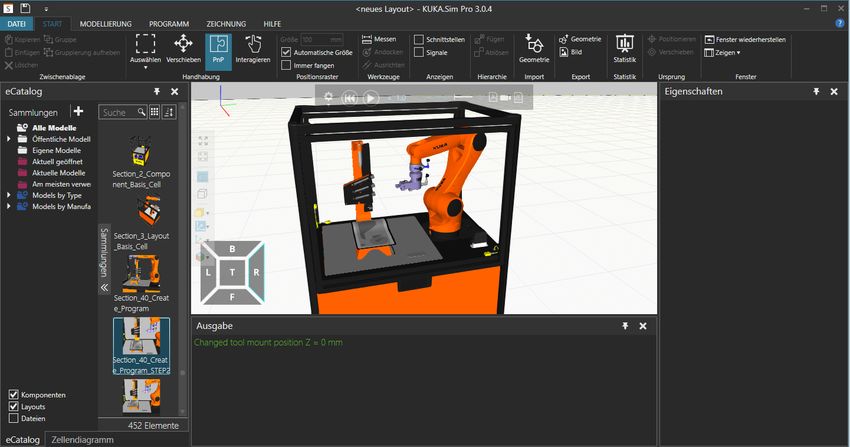
Simulationstool Kuka – KukaSim Das Simulationstool von Kuka heißt KukaSim. Auch hier kann eine offline Simulation basierend auf CAD-Daten erstellt werden. Auch in KukaSim kann die virtuelle Welt aufgebaut werden. Für die Einbindung der Robotersteuerung wird zusätzlich Office Lite benötigt.
Bei Kuka ist das virtuelle Handbediengerät eine eigene Software. Diese heißt Kuka Office Lite, diese ist aber bei Kuka Sim Pro enthalten.
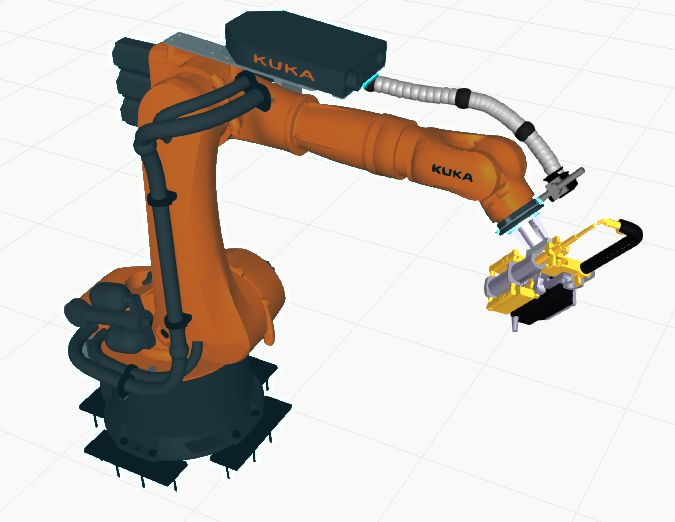
Simulationstool igus – Robot Control Das Simulationstool von igus heißt Robot Control. Auch hier kann eine offline Simulation basierend auf den CAD-Daten und dem Kinematischen Modell des Roboters erstellt werden. Die Software ist zum Free Download von igus zur Verfügung gestellt und kann auf der Homepage der Firma igus oder hier kostenlos zum üben heruntergeladen werden. Leider können derzeit keine zusätzlichen CAD Daten geladen werden, sondern nur die von igus bereitgestellten. Wir benutzen den aktuellen Roboter der igus Namens Rebell, dieser soll ab Ende 2021 für ca. 2500,00€ käuflich zur Verfügung stehen.
Fragen: Gibt es weitere Software zur Simulation anderer Hersteller? Aufgaben: Nennen Sie 3 weitere Hersteller und deren Simulationstools zur OLP-Programmierung von Roboter.
Sie können auch lesen