ABC Pre-Scan im F700 Das vorausschauende aktive Fahrwerk von Mercedes Benz
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

T I T E lT h E M A Fahrwerk ABC Pre-Scan im F700 Das vorausschauende aktive Fahrwerk von MercedesBenz Es ist gut zu wissen was kommt. Dies entspricht dem, was wir im täglichen Leben erfahren: wissen, was auf uns zukommt, hilft besser planen und Ressourcen intelligenter einsetzen. Das gilt auch für die Technik: Im Fahrwerkbereich ist es nützlich, das vorausliegende Straßenprofil zu kennen. Im Folgenden wird dargelegt, wie das mit Pre-Scan bezeichnete und auf der IAA 2007 von Mercedes-Benz erstmalig im F700 gezeigte aktive Fahrwerk mit Vorausschau eine Straßenerkennung auf Basis von Laserabtastung realisiert und durch einen integralen Entwurf von Fahrwerk-Regelung und Pre-Scan-Steuerung eine Komfortverbesserung erzielt. 388 ATZ 05I2008 Jahrgang 110

1 Einleitung Distanzwerte verändert werden, erfor- Der Autor
dert der Rekonstruktionsalgorithmus ei-
Mit einer geeigneten Vorausschaustrate- ne exakte Bestimmung der Aufbauposi
gie kann ein aktives Fahrwerk vorkondi- tion gegenüber der Fahrbahn, um eine Dr.-Ing.
tioniert werden. Eine derartige, voraus- Kompensation dieses Messfehlers zu er- Ralph Streiter
schauende Fahrwerkbeeinflussung er- möglichen. ist wissenschaftlicher
möglicht es, nicht nur zu reagieren, Die Orientierung des Sensors in Rela- Mitarbeiter bei Active
nachdem eine Fahrbahnunebenheit auf tion zur Fahrbahn wird mit dem vertika- Suspensions, Group
das Fahrzeug eingewirkt hat, sondern len Abstand zAF und dem Nickwinkel nAF Research and Advanced
zeitgleich oder sogar proaktiv zu han- angegeben. Aus einem polaren Entfer- Engineering, bei der
deln. Dies kommt dem Fahrkomfort zu- nungswert Di und dem zugehörigen Win- Daimler AG in Sindel
gute und lässt die Insassen ein völlig kel ni + nAF kann der kartesische Entfer- fingen.
neues Fahrgefühl erleben. Die Voraus- nungswert xi und Höhenwert zi für den
setzungen für die Umsetzung einer Spot i berechnet werden, Gl. (1), Gl. (2),
Fahrwerkregelung mit Vorausschau Tabelle:
(Pre-Scan) sind günstig. Mit Active-Body-
Control (ABC) [1], dem ersten aktiven xi = (Di + DOff) · cos (ni + nAF) + xKorr (vx , ΔT)Gl. (1)
Fahrwerk in einem Serienfahrzeug, ist
es seit 1999 möglich, Aufbaubewe- zi = (Di + DOff) · sin (ni + nAF) + zAF Gl. (2)
gungen durch vier Hydraulikzylinder
zu regeln. Gleichzeitig nimmt die Quali-
tät der sensorischen Erfassung der Fahr-
zeugumgebung zu. Treibender Faktor
der Tendenz zur perfekten Umfelder-
kennung ist die Vision vom unfallfreien
Fahren [2].
Zunächst wird dargelegt, wie das als
Pre-Scan bezeichnete, und auf der Inter-
nationalen Automobil-Ausstellung (IAA)
2007 in Frankfurt erstmalig in dem For-
schungsfahrzeug F700 gezeigte aktive
Fahrwerk mit Vorausschau eine Straßen
erkennung auf Basis von Laserabtastung Bild 1: Die Lasersensoren tasten das Fahrbahnhöhenprofil ab, wobei jedem Spot eine
realisiert und durch einen integralen individuelle Verteilungsfunktion zugeordnet wird
Entwurf von ABC-Regelung und Pre-Scan-
Steuerung gesteigerten Komfort erzielt.
Am Schluss werden Ergebnisse vorge- Tabelle: Variablendeklaration
stellt, die mit einem Prototyp gewonnen
worden sind. xKorr (vx , Δt) Ortskorrekturterm
DOff Messfehleroffset durch Remissionsänderungen auf unterschiedlich
reflektierenden Oberflächen
2 Die Höhenprofilschätzung ΘA Massenmatrix
KD Dämpfungsmatrix
Die Ermittlung der Fahrbahnhöhenpro-
KF Federmatrix
file vor den Vorderrädern ist eine Voraus-
setzung für das Pre-Scan-Konzept. Zu die- z Aufbauposition
sem Zweck sind zwei Lasersensoren in n Nickwinkel
die Frontscheinwerfer des Fahrzeugs ein- w Wankwinkel
gebaut, die Strahlen (Spots) mit einem
()
z
Abtastwinkel von 0,5° aussenden, Bild 1. n modale Koordinaten einer Fahrbahnoberfläche
Durch die unterschiedlichen Auftreff- w Straße
winkel weiten sich die Spots auf der Stra- uABC Reglerausgangsgröße
z rel
ße unterschiedlich stark aus. Die Laser-
sensorik liefert für jeden einzelnen Spot ( )
n rel
w rel
gemessene modale Relativkoordinaten des Aufbaus gegenüber einer
Fahrbahnausgleichsfläche durch die vier Radaufstandspunkte
()
i einen polaren Distanzwert Di. Da durch ..
Eigenbewegungen des Fahrzeugaufbaus ..z
..n gemessene modale Beschleunigungen des Aufbaus
Änderungen der Auftreffwinkel der w

Spots entstehen und somit die polaren
ATZ 05I2008 Jahrgang 110 389
Tite lt h ema Fahrwerk xKorr(vx, ∆T) berücksichtigt eine Ortskor- Daten zu dem bisherigen Straßenprofil umgekehrt werden. Daher ist die Kennt- rektur der Spots in Längsrichtung in Ab- statistisch hinzugefügt und wieder Posi nis der korrekten Geschwindigkeit des hängigkeit von der Fahrgeschwindigkeit tionsänderungen des Fahrzeugs durch Fahrzeugs wesentlich für die Effektivität und Zyklus- sowie Latenzzeiten der Mess- Eigenbewegung ermittelt und kompen- einer Pre-Scan-Strategie. Geschwindig- datenerfassung. Die Gl. (1) und Gl. (2) siert. Mit Voranschreiten des Iterations- keitsmessungen mit herkömmlichen Sys- transformieren somit die polaren Dis- vorganges steigt die Genauigkeit der temen wie dem Antiblockiersystem (ABS) tanzwerte in ein kartesisches Profil. Da Fahrbahnprofilschätzung. Im Ergebnis haben allerdings nur eine eingeschränkte die notwendige Messgenauigkeit und -si- liefert das Verfahren eine Höhenprofil- Genauigkeit und können Justagefehler cherheit nur durch statistische Berech- schätzung mit örtlich verteilten Feh- nicht korrigieren. Basierend auf der Über- nung erreicht werden können, wird in lerangaben, die zur Beurteilung der Da- legung, dass sich in aufeinanderfol- [4] ein Verfahren vorgeschlagen, das tenzuverlässigkeit genutzt werden. genden Lasersensordatensätzen das glei- durch gewichtete Mittelung und itera- che Fahrbahnprofil abbildet und eine x- tive Rekursionsrekonstruktion das Fahr- Verschiebung der rekonstruierten Fahr- bahnprofil berechnet. Dazu werden die 3 Geschwindigkeitsadaption bahnprofile von der Fahrgeschwindigkeit nicht äquidistanten Entfernungs- und durch Korrelationsanalyse abhängen muss, wird eine autonome Ge- Höhenwerte xi und zi auf ein äquidistan- schwindigkeitsadaption in das Rekons- tes Wegraster verteilt und somit örtlich Die Fahrgeschwindigkeit bestimmt das truktionskonzept integriert. Dazu wird gerastert. Dem Spot i wird entsprechend Timing des Pre-Scan-Eingriffs. Ist dieses die Korrelation zwischen zwei aufeinan- seiner zugehörigen x-Koordinate xi eine Timing fehlerhaft, kann ein möglicher derfolgend geschätzten Profilen bei rech- entfernungsabhängige und wegäquidis- Vorteil durch Pre-Scan in einen Nachteil nerischer Längsverschiebung untersucht tante Verteilungsfunktion zugeordnet, Bild 1 unten. Durch gewichtete Mitte- lung aneinandergrenzender und über- lappender Spots entsteht eine erste Schätzung für das Höhenprofil. Aus die- ser Schätzung kann durch Regression mit dem bisher (aus dem vorherge- henden Schritt) beobachteten Höhenpro- fil eine Höhen- und Nickwinkelkorrektur berechnet werden. Somit kann eine Itera- tionsvorschrift für zAF und nAF definiert werden. Mit den Korrekturwerten für zAF und nAF wird eine verbesserte Schätzung des aktuellen Profils durchgeführt, die zusammen mit dem bisher rekonstruier- ten Höhenprofil unter Berücksichtigung Bild 2: Die Geschwindigkeitsadaption stellt das korrekte Timing der Ableitungsberechnung der damit verknüpften Gewichtungen sicher eine neue Profilschätzung ermöglicht. Hier sind nun die Scandaten aus dem vorhergehenden Messzyklus mit den ak- tuellen Daten verknüpft. Im nächsten Schritt wird das berechnete Profil ent- sprechend dem zurückgelegten Weg rechnerisch entgegen der Bewegungs- richtung unter dem Auto durchgescho- ben. Ist soviel Weg zurückgelegt worden, dass das Fahrzeug über ein Fahrbahnpro- fil fährt, das bereits von den Lasersen- soren mit ausreichender Genauigkeit er- fasst wurde, wird die räumliche Orientie- rung des berechneten Fahrbahnprofils an die Fahrzeuglage angepasst. Auf diese Weise kann zwischen Fahrbahn- und Fahrzeugneigung unterschieden werden. Nach Beendigung eines Berechnungszyk- lus’ beginnt die Datenakquisition der Lasersensoren von vorne. Im nachfol- genden Iterationszyklus werden neue Bild 3: Gegenüberstellung von drei Messungen bei der Überfahrt des gleichen Fahrbahnprofils 390 ATZ 05I2008 Jahrgang 110
der Fahrgeschwindigkeit ist dabei nicht
nur für das Timing des Pre-Scan-Eingriffs
entscheidend, sondern hat auch für die
Berechnung der Fahrbahnkrümmung ei-
ne außerordentliche Bedeutung, da die
Fahrgeschwindigkeit vx quadratisch in
die Berechnung der Krümmung aus dem
Fahrbahnprofil z = z(x(t)) eingeht.
4 Genauigkeit der Höhenprofilschätzung
Für die resultierende Performance eines
Pre-Scan-Eingriffs ist auf der einen Seite
eine robuste Fahrwerkregelung und eine
effektive Pre-Scan-Strategie wichtig. Ei-
nen ebenso starken Einfluss hat aber auf
der anderen Seite die Qualität der Fahr-
bahnhöhenprofilschätzung. Um die Ge-
nauigkeit des beobachteten Straßenpro-
fils abschätzen zu können, wird mit
Bild 4: Das Erwartungsintervall bildet einen Fehlerschlauch um das Profil – die Häufigkeits einem Versuchsträger in mehreren Ver-
verteilung zeigt, dass die meisten Fehler unterhalb 1 mm liegen suchen das gleiche Fahrbahnprofil be-
fahren. Bild 3 zeigt die Gegenüberstellung
von drei resultierenden Höhenprofil-
schätzungen. Aus mehreren Messungen
und bei einer eindeutigen Richtungsten- schwindigkeit ist jeweils mit einem Feh- wird das Erwartungsintervall für jeden
denz als Geschwindigkeitskorrekturfak- lerfaktor beaufschlagt, Bild 2 Mitte. Mit Zeitpunkt gebildet, Bild 4 oben. Exempla-
tor für einen Iterationsprozess verwen- Beginn der Adaption konvergieren beide risch ergibt sich dabei ein Erwartungsin-
det. Dabei müssen neben der ermittelten Geschwindigkeiten auf den gleichen kor- tervall von +/- 1 cm. Die Häufigkeitsver-
Verschiebungsrichtung die Zyklus- und rekten Geschwindigkeitsverlauf, Bild 2 teilung, Bild 4 unten, zeigt, dass die
Latenzzeiten der Messdatenerfassung be- unten. Auf diese Weise wird sicherge- meisten Fehler kleiner als 1 mm sind.
rücksichtigt werden. Bild 2 zeigt exempla- stellt, dass die erste Ableitung des Fahr- Bild 5 zeigt einen ermittelten Fahrbahn-
risch an zwei Versuchsszenarien den Ite- bahnprofils tatsächlich zeitlich synchron höhenverlauf, der durch das beschrie-
rationsprozess. Die gemessene Fahrge- berechnet wird, Bild 2 oben. Die Kenntnis bene Verfahren ermittelt worden ist.
VieLFÄLtig Wie dAs Leben!
seissenschmidt Ag
Daimlerstraße 11
58840 Plettenberg
Die Natur mit ihrer Fähigkeit, die unterschiedlichsten Lebensformen
Telefon 02391 915 0
zu erzeugen, dient uns als ständig mahnendes Vorbild in unserem Fax 02391 915 196
Bestreben, die Vielfalt unseres Produktionsspektrums zu erhöhen, info@seissenschmidt.de
um unseren Kunden die Perfektion Ihrer Produkte zu ermöglichen. www.seissenschmidt.de
Und wir sind schon verdammt nah dran am Original.
Wir geben dem Fortschritt Antrieb.
ATZ 05I2008 Jahrgang 110 391
Tite lt h ema Fahrwerk
5 Die Regelung des aktiven Fahrwerks
Der Regelung kommt in zweierlei Hin-
sicht eine besondere Bedeutung zu: Zum
einen bildet die Fahrwerkregelung die
Rückfallebene für Pre-Scan, falls das Fahr-
bahnhöhenprofil mit zu geringer Genau-
igkeit erfasst wird. Zum anderen muss die Bild 5: Die Fahrbahnhöhenrekonstruktion kann auch Hindernisse mit geringer Höhe erfassen –
Regelung eine Struktur im geschlossenen die Pre-Scan-Schwelle (Bild 8) ist bei 40 m zu erkennen
Regelkreis realisieren, die für den Entwurf
der Pre-Scan-Strategie einen günstigen Zu-
gang bietet und ein sinnvolles Zusam-
menwirken zwischen ABC und Pre-Scan Der Nenner gibt das Stabilitätsverhalten lerdiagonalisierung wird nur tendenziell
ermöglicht. Dazu muss die Fahrwerkrege- wieder. Für dieses Matrixpolynom kann erreicht.
lung so entwickelt werden, dass eine Fre- nun ein Wunschpolynom der Form Gl. (6)
quenzreduktion und modale Betrach-
tungsweise des geschlossenen Regel- μ 7 s 7 + μ 6s 6 + μ 5s 5 + μ 4s 4 + μ 3s 3 + μ 2s 2 + μ 1s + I 6 Die Pre-Scan-Steuerung (PSS)
kreises möglich ist. Der Regler soll Filter- Gl. (6)
verhalten aufweisen, stationäre Konver- Die Frage nach dem Konzept von Pre-
genz hinsichtlich Sprung-, Rampen- und vorgegeben werden. Dieses Wunschpoly- Scan ist der zentrale Punkt für die Reali-
Steilwandkurvenfahrt erreichen sowie ei- nom sollte eine Diagonalstruktur aufwei- sierbarkeit des Fahrwerks mit Voraus-
ne vollständige Festlegung des resultie- sen und sich gleichzeitig am dynami schau. Nahe liegend sind Ansätze, die ei-
renden Stabilitätsverhaltens ermöglichen. schen Verhalten des ungeregelten Systems ne direkte Inversion der Raddynamik be-
Aus [3] ist bekannt, dass für ein Fahrzeug orientieren, um ein Zusammenwirken inhalten und so eine Total- oder Teilkom-
mit ABC-Federbeinen das folgende fre- von Regelung und Strecke zu ermögli- pensation der Straßenunebenheit am
quenzreduzierte Modell gefunden werden chen [3]. Für den geschlossenen Regelkreis Rad bewirken wollen. Diese Ansätze sind
kann, Gl. (3), Tabelle : ergibt sich daraus das Wunschverhalten aber aus mehreren Gründen problema-
der Form: tisch. Zum einen ist eine solche Kompen-
()
z
(ΘA ∙ s2 + KD ∙ s + KF) n = sation parameterempfindlich. Algeb-
w Gl. (3) (μ7 s7 + μ6s6 + μ5s5 + μ4s4 + μ3s3 + μ2s2 + μ1s + I) · raische Ansätze dieser Art können entge-
()
1
_
z
s ∙ uABC + (KD ∙ s + KF) ∙ n gen der beabsichtigten Wirkung das Ver-
()
w Straße z
n = – K –1
I_R
[(T4s4 + T3s3 + T2s2 + T1s + I) halten bis hin zur Instabilität verschlech-
Unter Berücksichtigung der oben ge- w tern. Des Weiteren ist eine sinnvolle Koo-
()
z
nannten Konvergenzüberlegungen für (KD · s2 + KF · s) – KI_R] · n Gl. (7) peration mit einem modalen Regelkon-
den geschlossenen Regelkreis kann die w Straße zept wie der ABC-Regelung nur schwer
folgende vereinfachte Matrix-Reglerstruk Durch Matrixkoeffizientenvergleich kön- zu organisieren. Es besteht die Gefahr,
tur gewählt werden, Gl. (4) (weitere Reg- nen die Reglerkoeffizientenmatrizen be- dass Fahrwerkregelung und Pre-Scan ge-
lerkoeffizientenmatrizen können Frei- stimmt werden, Gl. (8): geneinander arbeiten. Ein weiterer
heitsgrade eröffnen und die Realisierbar- Grund liegt darin, dass eine radbezogene
()
keit des Reglers unterstützen) Kompensation mehr agiert als nötig, da
T4 T
der Fahrzeugaufbau drei Freiheitsgrade
T3
uABC = [T4s4 + T3s3 + T2s2 + T1s + I] –1 · aufweist, aber durch vier Räder getragen
T2
( () ( )
z· · zrel Gl. (4) wird. Der daraus resultierende vierte
T1 =
[K2 B_R · s2 + KB_R · s] · n· · + KI_R nrel Freiheitsgrad wird als Verspannung [3]
w·· K2B_R
wrel bezeichnet und ist für den Aufbaukom-
KB_R
fort ohne Belang. Ein Straßenprofil, das
KI_R
mit den Eingangsmessgrößen, Tabelle.  derartige Verspannungsanregungen ent-
( )( )
Dies führt zu der folgenden Matrix- hält, wird bei einer radbezogenen Kom-
0 ΘA KA KF 0 0 0 0
gleichung für den geschlossenen Regel- = = = = = pensation im Vergleich zu einer aufbau-
0 0 ΘA KD KF 0 0 0
kreis, Gl. (5): = = = = = bezogenen Pre-Scan-Strategie mehr Akti-
0 0 0 ΘA KD KF 0 0
= = = = = vitäten zeigen, ohne einen Komfortge-
0 0 0 0 ΘA KD KF 0
– K –1
I_R
[(T4s4 + T3s3 + T2s2 + T1s + I)(ΘA · s3 + KD · = = =
= = winn zu erzielen. Die modale aufbau-
– ΘA 0 0 0 – I 0 0 0
= =
= = = = bezogene Herangehensweise wird daher,
()
z – KD 0 0 0 0 – I 0 0
s2 + KF · s) – K2B_R · s4 – KB_R · s3 – KI_R] · n = =
= = = = aus Gründen der Energieeffizienz und
w – KE μ7 μ6 μ5 μ4 μ3 μ2 μ1
Gl. (8) Robustheit, den Vorzug gegenüber ande-
= – K –1
I_R
[(T4s4 + T3s3 + T2s2 + T1s + I) · ren Ansätzen haben. Aus den genannten
Der so berechnete Regler erzielt eine Ent- Gründen wird eine modale PSS entwor-
()
z
(KD · s2 + KF · s) – KI_R] · n Gl. (5) kopplung der Eigendynamik. Eine Zäh- fen. Dazu wird die Gleichung des ge-
w Straße
392 ATZ 05I2008 Jahrgang 110
schlossenen Regelkreises als Grundlage
für den Steuerungsentwurf verwendet.
Durch diesen Ansatz ist das harmonische
Zusammenwirken von PSS und ABC-Re-
gelung gewährleistet. Wird in Gl. (9) für
das frequenzreduzierte Modell
uABC : = uABC + uPR ev Gl. (9)
gesetzt, ergibt sich für den geschlossenen
Regelkreis die Gl. (10):
(μ7 s7 + μ6s6 + μ5s5 + μ4s4 + μ3s3 + μ2s2 + μ1s + I) ·
()
z
n = – K –1
I_R
[(T4s4 + T3s3 + T2s2 + T1s + I)·
w
()
z
(KD · s2 + KF · s) – KI_R] · n Gl. (10)
w Straße
– K –1
I_R
[(T4s4 + T3s3 + T2s2 + T1s + I) · uPreview
Um direkten Zugang zu den Eingangs-
()
z
größen n zu erlangen, wird die Filter-
w Straße
wirkung des Reglers kompensiert, Gl. (11):
uPreview = (T4s4 + T3s3 + T2s2 + T1s + I)-1 · K I_R · u*Preview
Gl. (11)
Diese Kompensation ist unkritisch, da
alle Koeffizienten aus dem Reglerent-
wurf exakt bekannt sind. Dieser Kompen-
sationsanteil bildet den Nenner der PSS.
Gl. (10) vereinfacht sich zu:
(μ7 s7 + μ6s6 + μ5s5 + μ4s4 + μ3s3 + μ2s2 + μ1s + I) ·
()
z
n = – K –1
I_R
[(T4s4 + T3s3 + T2s2 + T1s + I)
w
()
z
(KD · s2 + KF · s) – KI_R] · n – u*Preview Gl. (12)
w Straße
Diese Matrixgleichung wird als entkoppel-
bar betrachtet. Durch die Diagonalstruk-
turvorgabe für das Wunschpolynom ist di-
es für den Nenner des Systems richtig. Für
den Zähler trifft dies nur näherungsweise
zu. Fehler, die hier durch die Forderung
nach Entkoppelbarkeit entstehen, beein-
trächtigen aber die Stabilität des Systems
nicht, da keine Rückwirkung auf den Nen-
ner besteht. Somit kann für Modus ϑj fol-
gende skalare Gl. (13) angegeben werden:
Nj_Wunsch · ϑj = Zj_Straße · ϑj_Straße – u*Preview_Modus_ϑ
j
Gl. (13)
Anhand der entkoppelten Gleichungen
für das geregelte Fahrzeug kann nun für
Tite lt h ema Fahrwerk
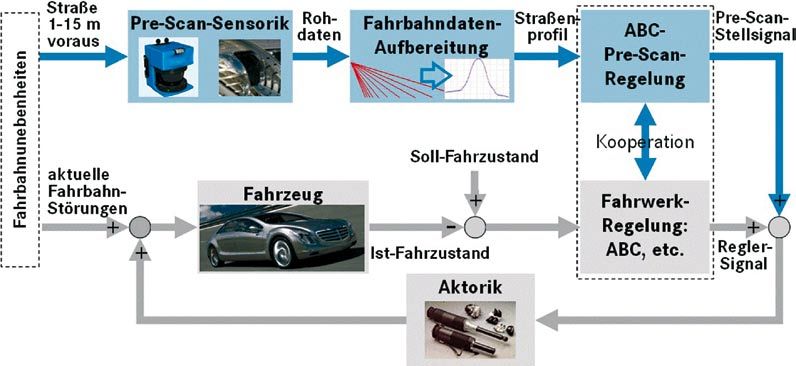
Bild 6: Gesamtkonzept der
Pre-Scan-Fahrwerkregelung
jeden Modus einzeln eine Pol-Nullstellen- da es sich bei den gekürzten Polen aus- (Nj_g · N’j_Wunsch) · ϑj =
kürzung vorgenommen werden. Dieser schließlich um stabile Pole handelt, und
!
Maßnahme kommt eine große Bedeu- das resultierende System vom Fahrer als (Nj_g · Z’j_Straße) · ϑj_Straße – u*Preview_Modus_ϑ =
j
tung zu, da sie verhindert, dass Pre-Scan angenehmer empfunden wird, da er eine
einer durch die Regelung häufig er- geringere Bewegungskomplexität wahr- (Nj_g · Z j_Straße ) · ϑj_Straße Gl. (15)
Wunsch
zielten Pol-Nullstellenkürzung entgegen- nimmt. Dabei behält die Gesamtstruktur
wirkt, indem Ableitungsterme des Fahr- die vorgesehenen System- und Robust- Es folgt, Gl. (16):
bahnprofils Verwendung finden, die für heitseigenschaften. Es erfolgt zunächst
eine Pol-Nullstellenkürzung notwendig ein Ausklammern des gemeinsamen Po- u*Preview_Modus_ϑ =
j
sind. Ohne Pol-Nullstellenkürzung wür- lynoms Nj_g, Gl. (14):
de ein Pre-Scan-Eingriff zu einer Ver- Nj_g · [Z’j_Straße – Z Wunsch
j_Straße
] · ϑj_Straße Gl. (16)
schlechterung des Gesamtverhaltens (Nj_g · N’j_Wunsch) · ϑj =
führen, da bereits eliminierte Bewe- Im nächsten Schritt wird eine Frequenz-
gungsanteile wieder zum Vorschein kä- (Nj_g · Z’j_Straße) · ϑj_Straße – u*Preview_Modus_ϑ Gl. (14) reduktion durchgeführt, die unerwün
j
men. Obwohl eine Pol-Nullstellenkür- schte Pre-Scan-Aktivitäten durch hoch-
zung in der Regelungstechnik aus Grün- Die PSS wird durch Vorgabe eines ska- frequente Störanteile in ϑj_Straße vermei-
den der Robustheit kritisch gesehen laren Wunschpolynoms Z Wunschj_Straße
für den det. Die obige Gl. (16) geht somit über in,
wird, ist dies hier ein günstiger Umstand, Zählerterm Z’j_Straße bestimmt, Gl. (15): Gl. (17):
u*Preview_Modus_ϑ =
j
Nred
j_g
· [Z’j_Straße – Z Wunsch
j_Straße
]red · ϑj_Straße Gl. (17)
Werden die Kompensationsentwürfe für
alle Freiheitsgrade zusammengefasst,
kann die Pre-Scan-Designgleichung in
die Ursprungsgleichung eingesetzt wer-
den, Gl. (18):
uPreview = (T4s4 + T3s3 + T2s2 + T1s + I)–1 ·
()
z
KI_R · Nred
j_g
· [Z’Straße – Z Wunsch
Straße
] red · n Gl. (18)
w Straße
7 Realisierung
Es stellt sich die Frage, wie das Wunsch-
zählerpolynom Z Wunsch
j_Straße
sinnvoll definiert
werden kann. Randbedingungen bilden
Konvergenzforderungen für das Gesamt-
system. Durch die gewählte Reglerstruk-
Bild 7: Überfahrt der Pre-Scan-Schwelle tur beinhaltet der geschlossene Regelkreis
394 ATZ 05I2008 Jahrgang 110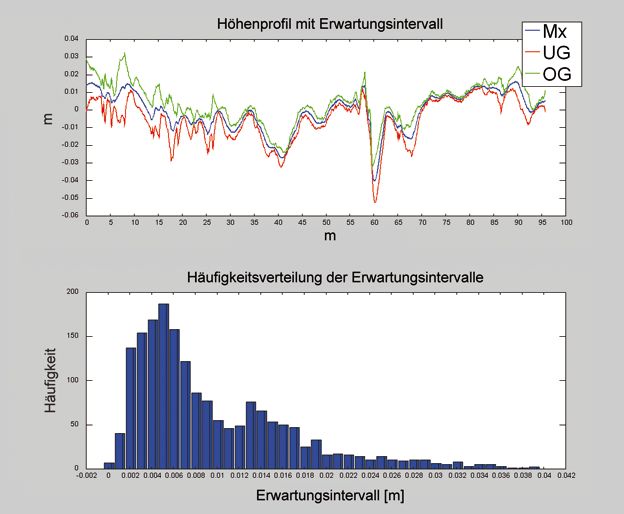
müssen. Dies führt für die PSS auf ein
Zählerpolynom, das erst ab der zweiten
oder dritten Ableitung Signale des Stra-
ßenprofils verwendet. Da häufig die Ord-
nung des Terms Nred j_g
· [Z’j_Straße – Z Wunsch
j_Straße
]red
größer ist als die Ordnung des Nenners
(T4s4 + T3s3 + T2s2 + T1s + I) und somit die
Realisierbarkeit gefährdet ist, kann das
Fehlen der Koeffizienten nullter und
erster Ordnung günstig ausgenutzt wer-
den. Durch eine phasenfreie Vorwärts-
Rückwärtsfilterung des ermittelten
Straßenprofils wird die erste und zweite
Ableitung an den vier Radaufstands-
punkten direkt berechnet. Der Zähler-
grad der PSS kann daher formal zwei
Bild 8: Die Pre-Scan-Schwelle ist eine 5 cm hohe und 1 m lange sinusähnliche Bodenwelle Ordnungen größer sein als der Nenner-
grad.
diese Forderungen bereits. Somit müssen können nur bei sehr kleinen Geschwin- 8 Ergebnis
die Zählerkoeffizienten von Z’j_Straße, die digkeiten reduziert werden. Im allgemei-
mit Ableitungspotenzen der nullten, ers- nen Fall werden daher die Koeffizienten Um das Potenzial von ABC Pre-Scan un-
ten und zweiten Ordnung verknüpft von Z Wunsch
j_Straße
bis zur zweiten oder dritten tersuchen zu können, wurde das Gesamt-
sind, belassen werden, beziehungsweise Ordnung denen von Z’j_Straße entsprechen konzept, Bild 6, zunächst in einem Proto-
Alcoa Forged Alloy Wheels. Driving the industry.
Very light, very strong high performance car wheels.
For further information contact:
David Yates
Tel: +44 (0)7989 973 723
Stuttgart: +49 (0)7022 940 404
2007 PACE Award Winner
for Dura-Bright® Technology david.yates2@alcoa.com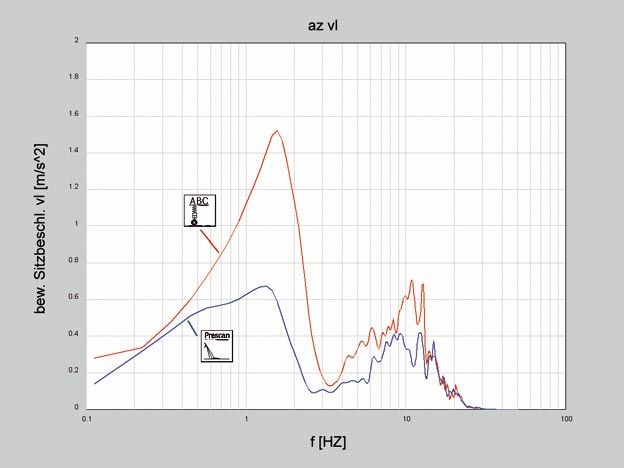
Tite lt h ema Fahrwerk
typ dargestellt, Bild 7. Bei Messfahrten
über die sogenannte Pre-Scan-Schwelle
kann das Potenzial voll ausschöpfen wer-
den, Bild 8.
Der Vergleich zwischen den nach [5]
bewerteten Frequenzspektren der Fah-
rersitzbeschleunigung zeigt die Kom-
fortverbesserung durch Pre-Scan, Bild 9.
In Bild 10 ist die normierte Stößigkeit
(Maximalwert der Vertikalbeschleuni-
gung) bei verschiedenen Geschwindig-
keiten am Fahrersitz dargestellt. Die Kur-
ven zeigen, dass Pre-Scan bei der Schwel-
lenüberfahrt mit 30 km/h immer noch
eine geringere Stößigkeit aufweist als
ABC mit 10 km/h.
Auch auf normalen Fahrbahnen kann
Pre-Scan überzeugen. Bild 11 zeigt das Fre-
Bild 9: ABC Pre-Scan reduziert bei Überfahrt der Pre-Scan-Schwellen die Beschleunigungen quenzspektrum der Fahrersitzbeschleuni-
am Fahrersitz gung bei einer Autobahnfahrt mit
100 km/h. Pre-Scan erzielt gegenüber ABC
einen Komfortvorteil. Einen ebenso gro
ßen Vorteil kann Pre-Scan auf dem so ge-
nannten Freeway-Hop, einer Autobahn
mit zyklisch wiederkehrenden Betonplat-
tenschlägen, erzielen. Bild 12 zeigt die Ge-
genüberstellung der bewerteten Nickbe-
schleunigungen an der Fahrerposition.
ABC reduziert deutlich die Schwingungen
gegenüber dem ungeregelten Fahrzeug.
Pre-Scan kann die Beschleunigungen
noch einmal deutlich verringern.
Bild 10: Vergleich der normierten Stößigkeit am Fahrersitz bei Schwellenüberfahrt – 9 Zusammenfassung
bei drei verschiedenen Geschwindigkeiten zeigt Pre-Scan sein Potenzial
Pre-Scan fasst die Möglichkeiten eines ak-
tiven Fahrwerks mit der lasergestützten
Fahrbahnhöhenprofilerkennung durch
ein integrales Regel- und Steuerkonzept
zu einer Funktion zusammen. Die Fahr-
bahnhöhenprofilerkennung basiert auf
einem statistischen Verfahren, das durch
Scan-Matching die notwendige Beobach-
tungsgenauigkeit und Robustheit für die
Regelung erreicht und die autonome
vertikale Fahrzeugbewegung, die Ge-
schwindigkeit des Fahrzeugs sowie ver-
schiedene weitere Sensorkorrekturen re-
kursiv schätzt.
Der Entwurf der Pre-Scan-Steuerung
basiert auf einer modalen Betrachtung
des geschlossenen Regelkreises und ar-
beitet nach dem Kompensationsprinzip
harmonisch mit der ABC-Regelung zu-
sammen. Das Ergebnis dieser Synthese
ist ein deutlich verbesserter Fahrkom-
Bild 11: Vergleich der bewerteten Frequenzspektren bei einer Autobahnfahrt mit 100 km/h fort. Der Ansatz wurde erstmals in einem
396 ATZ 05I2008 Jahrgang 110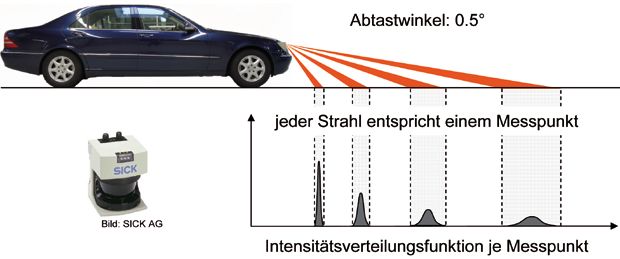
Literaturhinweise
[1] Wolfsried, S.; Schiffer, W.: ActiveBodyControl. Das
neue aktive Federungs- und Dämpfungssystem des
CL-Coupé von Mercedes-Benz, VDI-Fachtagung
Reifen/Fahrwerk/Fahrbahn, Hannover, 1999
[2] Daimler Chrysler AG: Die Vision vom unfallfreien
Fahren, Hightech Report 2001
[3] Streiter, R.: Entwicklung und Realisierung eines
analytischen Regelkonzeptes für eine aktive
Federung, Dissertation, TU Berlin, 1996
[4] Schindler, A.; Streiter, R.; Bretthauer, G.: Integraler
Ansatz für eine Fahrzeugregelung mit Preview,
chassis.tech München, 2007
[5] Frank, P.: Bewertungsverfahren Schwingempfinden,
Daimler Benz AG, Forschungsinstitut F1M, 1994
(94-004), Technischer Bericht
Bild 12: Vergleich der bewerteten Frequenzspektren der Nickbeschleunigung auf dem
Freeway-Hop bei 40 km/h
Download des Beitrags unter
www.ATZonline.de
Fahrzeug umgesetzt. Messungen auf ver- wurde anlässlich der IAA 2007 im For- Read the English e-magazine.
schiedenen Fahrbahnen untermauern schungsfahrzeug F700 unter dem Namen Order your test issue now:
viewegteubner@abo-service.info
das Potenzial von Pre-Scan. Das Konzept Pre-Scan-Fahrwerk präsentiert.
CO2 Air Condition – VOSS is ready for take-off
VOSS Blockverschraubung und Steckverbindung
mit Weichdichtung – die starke Verbindung für Ihre
CO2-Klimaanlage:
Dichtheitsanforderung:
Niederdruck und Hochdruck < 0,5 g /a
Heißgas < 1,0 g /a
Berstdruck > 510 bar
Temperaturbeständigkeit -40° C bis +165° C
„ExplosiveDekompression“
Sicheres Öffnen auch unter Druck
Weitere Infos unter www.voss.de
oder automotive@voss.de
Erfahrung plus Ideen
ATZ 05I2008 Jahrgang 110 397Sie können auch lesen