Adept-Handbediengerät T2 - Betriebsanleitung
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Adept-Handbediengerät T2
Betriebsanleitung
Teilenummer: 09017-001, Rev C
Juli 2009
5960 Inglewood Drive • Pleasanton, CA 94588 • USA • Phone 925.245.3400 • Fax 925.960.0452
Otto-Hahn-Strasse 23 • 44227 Dortmund • Germany • Phone +49.231.75.89.40 • Fax +49.231.75.89.450
Block 5000 Ang Mo Kio Avnue 5 • #05-12 Techplace II • Singapore 569870 • Phone +65.6755.2258 • Fax +65.6755.0598
Alle hier erwähnten Informationen sind Eigentum der Adept Technology, Inc. und dürfen ohne vorherige schriftliche Gene-
hmigung durch die Adept Technology, Inc. weder ganz noch teilweise vervielfältigt werden. Die vorliegenden Informa-
tionen können sich ohne Vorankündigung ändern und können deshalb nicht als verbindlich ausgelegt werden. Dieses
Handbuch wird regelmäßig geprüft under überarbeitet.
Adept Technology, Inc., übernimmt für etwaige Fehler oder Auslassungen in diesem Dokument keinerlei Verantwortung.
Bemerkungen und Hinweise zu diesem Handbuch können Sie an uns richten. Ihre Kommentare helfen uns bei der Vorbere-
itung zukünftiger Dokumentationsmaterialien. Bitte schicken Sie uns Ihre Kommentare per Email an: techpubs@adept.com.
Copyright 2005 - 2009 by Adept Technology, Inc. All rights reserved.
Adept, das Adept Logo, das Adept Technology Logo, AdeptVision, AIM, Blox, Bloxview, FireBlox, FireView, HexSight,
Meta Controls, MetaControls, Metawire, Soft Machines und Visual Machines sind eingetragene Marken der Adept
Technology Inc. Brain on Board ist eine eingetragene Marke der Adept Technology Inc. in Deutschland.
ACE, Adept 1060 / 1060+, Adept 1850 / 1850 XP, Adept 540 Adept 560, Adept AnyFeeder,
Adept Award, Adept C40, Adept C60, Adept CC, Adept Cobra 350, Adept Cobra 350 CR/ESD,
Adept Cobra 550, Adept 550 CleanRoom, Adept Cobra 600, Adept Cobra 800, Adept Cobra i600,
Adept Cobra i800, Adept Cobra PLC server, Adept Cobra PLC800, Adept Cobra s600, Adept Cobra s800, Adept
Cobra s800 Inverted, Adept Cobra Smart600, Adept Cobra Smart800, Adept DeskTop, Adept FFE,
Adept FlexFeeder 250, Adept IC, Adept iSight, Adept Impulse Feeder, Adept LineVision, Adept MB-10 ServoKit, Adept
MC, Adept MotionBlox-10, Adept MotionBlox-40L, Adept MotionBlox-40R, Adept MV Adept MV-10, Adept MV-19,
Adept MV4, Adept MV-5, Adept MV-8, Adept OC, Adept Python, Adept Quattro s650,
Adept Quattro s650H, Adept sDIO, Adept SmartAmp, Adept SmartAxis, Adept SmartController CS,
Adept SmartController CX, Adept SmartModule, Adept SmartMotion, Adept SmartServo, Adept sMI6,
Adept sSight, Adept Viper s650, Adept Viper s850, Adept Viper s1300, Adept Viper s1700, Adept Viper s2000,
AdeptCartesian, AdeptCast, AdeptForce, AdeptFTP, AdeptGEM, AdeptModules, AdeptMotion,
AdeptMotion Servo, AdeptMotion VME, AdeptNet, AdeptNFS, AdeptOne, AdeptOne-MV, AdeptOne-XL, AdeptRAPID,
AdeptSight, AdeptSix, AdeptSix 300, AdeptSix 300 CL, AdeptSix 300 CR, AdeptSix 600, AdeptTCP/IP, AdeptThree,
AdeptThree-MV, AdeptThree-XL, AdeptTwo, AdeptVision, AVI AdeptVision,
AGS AdeptVision GV, AdeptVision I, AdeptVision II, AdeptVision VME, AdeptVision VXL, AdeptVision XGS, AdeptVision
XGS II, AdeptWindows, AdeptWindows Controller, AdeptWindows DDE, AdeptWindows Offline Editor, AdeptWindows
PC, AIM Command Server, AIM Dispense, AIM PCB, AIM VisionWare, A-Series, FlexFeedWare, HyperDrive, IO Blox,
MicroV+, MotionBlox, MotionWare, ObjectFinder, ObjectFinder 2000, PackOne, PalletWare, sAVI, S-Series, UltraOne,
V, V+ und VisionTeach sind Marken
der Adept Technology, Inc.
Alle Marken anderer Unternehmen, die in diesem Dokument erwähnt werden,
sind Eigentum der jeweiligen Unternehmen.
Gedruckt in Deutschland
Inhaltsverzeichnis
1 Einführung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.1 Produktbeschreibung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
1.2 Systemkompatibilität . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.3 Hardwarespezifikationen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 6
1.4 Abmessungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.5 Sicherheit . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
Gefahren, Warnungen und Hinweise in der Betriebsanleitung . . . . . . . . . . . 7
Not-Aus-Schalter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
1.6 Der richtige Umgang mit dem Handbediengerät T2 . . . . . . . . . . . . . . . . . 9
1.7 Wenn Sie Fragen haben . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Zugehörige Handbücher . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 10
Adept Document Library . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
1.8 Programmieren des Handbediengerätes T2 . . . . . . . . . . . . . . . . . . . . . . 11
2 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
2.1 Installation in SmartController Systeme . . . . . . . . . . . . . . . . . . . . . . . . . . 13
Überbrückungsstecker . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
2.2 Installation in Robotersysteme der i-Serie . . . . . . . . . . . . . . . . . . . . . . . . 15
2.3 Anbringen der optionalen Wandhalterung . . . . . . . . . . . . . . . . . . . . . . . 16
3 Kennzeichnung von Bedienelementen und Anzeigen . . . . . . . . . . . 17
3.1 Bedienelemente und Anzeigen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
3.2 Zustimmschalter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
4 Betrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.1 Hauptmenü - Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
4.2 Ein- und Ausschalten der Antriebsleistung . . . . . . . . . . . . . . . . . . . . . . . . 23
Einschalten der Antriebsleistung mit dem Handbediengerät T2 . . . . . . . . . 23
Im Automatikbetrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Im Handbetrieb . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
Ausschalten der Antriebsleistung mit dem Handbediengerät T2 . . . . . . . . . 24
Einschalten der Antriebsleistung nach einem Not-Aus . . . . . . . . . . . . . . . . . 24
Einschalten der Antriebsleistung nach dem Loslassen des Zustimmschalters 24
Adept T2 Handbediengerät Betriebsanleitung, Rev C 3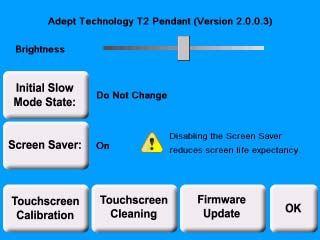
Inhaltsverzeichnis
4.3 Kalibrierung mit dem Handbediengerät T2 . . . . . . . . . . . . . . . . . . . . . . . 25
Typische Kalibrierung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
Kalibrierung im Sonderfall . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
4.4 Funktionsbeschreibungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Vordefinierte Funktionstasten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Programmierbare Funktionstasten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Multifunktionstasten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
4.5 Im Computermodus (COMP) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
Betriebsmodus „Off“ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
Hintergrundzustand . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
4.6 Steuermodi des Handbediengerätes . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
WORLD-Modus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 27
TOOL-Modus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
JOINT-Modus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
FREE-Modus . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.7 Bearbeitungsfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
4.8 Anzeigefunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
4.9 Funktionen zum Löschen von Fehlermeldungen . . . . . . . . . . . . . . . . . . . 34
4.10 CMD-Funktionstaste . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.11 RUN/HOLD-Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
4.12 PROG SET-Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.13 STEP-Funktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
MCP.NO.POT Systemschalter . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.14 Greiferfunktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
4.15 Steuerung von mehr als einem Roboter . . . . . . . . . . . . . . . . . . . . . . . . . 39
4.16 Systemmenü . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
Anpassen von Kontrast und Helligkeit des LCD-Bildschirms (Brightness) . . . 40
Einstellen der Startgeschwindigkeit (Initial Slow Mode State) . . . . . . . . . . . 40
Einstellen des Bildschirmschoners (Screen Saver) . . . . . . . . . . . . . . . . . . . . . 40
5 Wartung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.1 Firmware-Update (Firmware Update) . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5.2 Kalibrieren des Touchscreen (Touchscreen Calibration) . . . . . . . . . . . . . 45
5.3 Reinigen des Touchscreen (Touchscreen Cleaning) . . . . . . . . . . . . . . . . . 45
5.4 Fehlerbehebung . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
Stichwortverzeichnis . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
4 Adept T2 Handbediengerät Betriebsanleitung, Rev C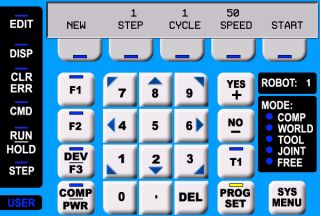
Einführung 1
1.1 Produktbeschreibung
Das Adept-Handbediengerät T2 bietet die Funktionen einer Benutzeroberfläche und ermöglicht das
Teachen der Positionen der an das System angeschlossenen Roboter. Es ist ergonomisch geformt und
widerstandsfähig konstruiert und für den Gebrauch von Rechts- wie Linkshändern konzipiert. Alle
Greif- und Haltepositionen erlauben eine komfortable und ermüdungsfreie Bedienung des Gerätes.
Abbildung 1.1: Adept-Handbediengerät T2
Die Sicherheitsmerkmale umfassen:
• Not-Aus-Schalter (Schaltkreis mit zwei Kanälen).
• Zwei 3-stufige Zustimmschalter (Schaltkreis mit zwei Kanälen)
Die Softwaremerkmale umfassen:
• Steuern des Roboters durch Aktivieren und Deaktivieren der Antriebsleistung und des
schrittweisen Vorrückens (Jogging) des Roboters
• Teachen von Positionen
• Anzeigen von: Roboterpositionen, digitalen Ein- und Ausgängen, Systemstatus,
Systemidentifikation und Fehlermeldungen
• Starten und Beenden von Anwendungsprogrammen
• Anzeigen und Bearbeiten von globalen Programmvariablen
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 5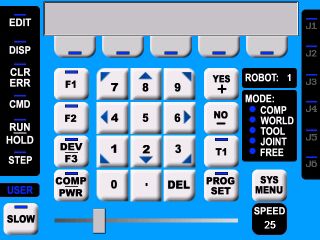
Kapitel 1 - Einführung
1.2 Systemkompatibilität
Das Handbediengerät T2 ist so angelegt, dass es mit Adept SmartController basierten Systemen,
kompatibel ist, wie zum Beispiel:
• Adept Quattro Roboter
• Adept Cobra Roboter der s-Serie
• Adept SmartModule-Systeme und Python Modulsysteme
• AdeptViper Roboter
• Adept SmartMotion-Systeme mit sMI6
• AdeptOne Roboter mit SmartController
Das Handbediengerät T2 ist auch mit Robotern kompatibel, die den SmartController nicht verwenden,
wie zum Beispiel:
• Adept Cobra i600/i800 Roboter
1.3 Hardwarespezifikationen
Tabelle 1.1: Hardwarespezifikationen für das Handbediengerät T2
Durchmesser 252 mm
Höhe (einschließlich Griff) 114 mm
Gewicht 1,25 kg
Kabellänge des Handbediengerätes Standard: 10 m, Optional: 3 m
Länge des Adapterkabels 2m
Display-Typ Flüssigkristallanzeige (LCD)
Display-Größe 132 mm x 98 mm
Display-Auflösung 640 x 480 pixel
Display-Farben 65.536
Display-Beleuchtung Ja
Sicherheitskontrollen 1 Not-Aus-Schalter
2 Zustimmschalter (3-stufig)
Betriebstemperatur 0 - 50° C
Relative Feuchtigkeit 5 - 95 %
Stoßfestigkeit 25g/11ms (IEC 60068-2-27)
Schutz gegen das Eindringen von Schmutz IP65
oder Flüssigkeiten
6 Adept-Handbediengerät T2 Betriebsanleitung, Rev CAbmessungen
1.4 Abmessungen
Abbildung 1.2: Abmessungen des Handbediengerätes T2
1.5 Sicherheit
Das Gerät wurde unter Einhaltung der maßgeblichen Sicherheitsnormen entwickelt, hergestellt, geprüft
und dokumentiert. Wenn Sie die in diesem Handbuch beschriebenen Anweisungen hinsichtlich
Sicherheit und Verwendung befolgen, verursacht das Handgerät keine Verletzungen oder Schäden an
Maschinen oder Ausrüstung.
Die indiesem Handbuch beschriebenen Anweisungen müssen unter allen Umständen genau befolgt
werden. Anderenfalls könnten potentielle Gefahrenquellen entstehen oder die im Handbediengerät
integrierten Sicherheitsfunktionen wirkungslos werden.
Gefahren, Warnungen und Hinweise in der Betriebsanleitung
Im vorliegenden Handbuch gibt es sechs verschiedene Warnhinweise.
Geordnet nach abnehmender Wichtigkeit sind dies folgende:
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 7Kapitel 1 - Einführung
LEBENSGEFAHR: Dieses Pikto zeigt eine unmittelbare Gefahr
durch elektrischen Strom an, die bei Missachtung zum Tod
oder zu schweren Verletzungen führen kann.
LEBENSGEFAHR: Dieses Pikto zeigt eine unmittelbare Gefahr an,
die bei Missachtung zum Tod oder zu schweren Verletzungen
führen kann.
WARNUNG: Dieses Pikto zeigt eine potenzielle Gefahr durch
elektrischen Strom an, die bei Missachtung zu schweren
Verletzungen oder ernsthaften Schäden an der Ausrüstung führen
kann.
WARNUNG: Dieses Pikto zeigt eine potenzielle Gefahr an, die
bei Missachtung zu Verletzungen oder ernsthaften Schäden an der
Ausrüstung führen kann.
VORSICHT: Dieses Pikto weist auf eine Situation hin, die bei
Missachtung zu Schäden an der Ausrüstung führen kann.
HINWEIS: Hier finden Sie zusätzliche Informationen und Hinweise auf bestimmte
Aspekte oder Vorgehensweisen bzw. Tipps für die Handhabung.
Not-Aus-Schalter
Der Not-Aus-Schalter des Handbediengerätes T2 entspricht den Anforderungen der Norm EN ISO
13850:2006 (vormals EN 418:1992). Er muss als Not-Aus-Vorrichtung der Klasse 0 oder 1
(siehe EN 60204-1, Kapitel 9.2.5.4.2) auf Basis der Risikobeurteilung für das Gerät konzipiert sein.
Der Anschluss der zwangsöffnenden Unterbrechungskontakte an ein entsprechendes
Überwachungssystem muss mit der durch die Risikobeurteilung (nach EN 954-1) definierten
Gerätesicherheitsklasse übereinstimmen.
8 Adept-Handbediengerät T2 Betriebsanleitung, Rev CDer richtige Umgang mit dem Handbediengerät T2
LEBENSGEFAHR: Solange das Handbediengerät nicht an die
Maschine angeschlossen ist, sollten Sie es an einem dem
Bedienpersonal nicht zugänglichen Ort aufbewahren.
Bedenken Sie, dass das Bedienpersonal im Fall von Gefahr
automatisch den nächstgelegenen Not-Aus-Schalter betätigen
würde. Dies könnte fatale Folgen haben, da der Not-Aus am
Handbediengerät nicht funktionieren wird, wenn das Gerät nicht
an die Maschine angeschlossen ist.
1.6 Der richtige Umgang mit dem Handbediengerät T2
Sie haben sich für ein hochwertiges Gerät entschieden, das mit sehr empfindlicher und moderner
Elektronik ausgestattet ist. Um Funktionsstörungen oder Schäden durch unsachgemäße Handhabung
zu vermeiden, die einen Garantieverlust zur Folge haben könnten, folgen Sie während der Bedienung
bitte diesen Anweisungen.
• Zur Bedienung des Touchscreens verwenden Sie bitte Ihren Finger oder den mitgelieferten
Bedienstift für Touchpanels. Verwenden Sie niemals spitze Gegenstände (wie z. B. einen
Schraubendreher), um den Touchscreen zu bedienen.
Abbildung 1.3: Bedienstift für die Touchscreen-Bedienung
• Klemmen oder quetschen Sie das Kabel nicht ein.
• Legen Sie das Kabel nicht über spitze Kanten, um Schäden am Kabemantel zu vermeiden.
• Wenn Sie das Handbediengerät T2 nicht verwenden, hängen Sie es zur Aufbewahrung
an die optionale Wandhalterung.
• Legen Sie das Handbediengerät T2 niemals auf die Bedienerseite um Schäden am Display
oder an den Tasten zu vermeiden.
• Legen Sie das Handbediengerät T2 niemals auf eine instabile Oberfläche.
Es könnte hinfallen und beschädigt werden.
• Platzieren Sie das Handbediengerät T2 niemals in der Nähe von Wärmequellen
und setzen Sie es niemals direktem Sonnenlicht aus.
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 9Kapitel 1 - Einführung
• Vermeiden Sie es, das Handbediengerät T2 mechanischen Vibrationen, übermäßigem Staub,
Feuchtigkeit oder starken Magnetfeldern auszusetzen.
• Reinigen Sie den Touchscreen oder andere Oberflächen des Handbediengerätes T2 niemals
mit Lösungsmitteln, Scheuermitteln oder -bürsten. Verwenden Sie für die Reinigung des
Handbediengerätes T2 ein weiches Tuch und etwas Wasser oder ein mildes Reinigungsmittel.
• Vergewissern Sie sich, das keine fremden Gegenstände oder Flüssigkeiten in das
Handbediengerät T2 eindringen können. Überprüfen Sie regelmäßig die Schutzabdeckungen
des Gerätes um sicherzustellen, dass alle Gehäuseschrauben fest angezogen sind.
Vergewissern Sie sich auch, dass im Bereich des Kabeleingangs, am Verschlussstopfen oder
der Zugentlastung keine Schäden vorliegen.
WARNUNG: Wenn die Abdeckung des Kabeleingangs entfernt
wurde, kann das Handbediengerät T2 empfindlich auf
elektrostatische Entladung reagieren.
1.7 Wenn Sie Fragen haben
Informationen zum Kundendienst für Adept-Hardware und -Software finden Sie auf der Adept Website:
• Kontaktinformationen: http://www.adept.de/kontakt-center
• Supportinformationen: http://www.adept.de/support
Weitere Informationen über Adept Technology: http://www.adept.de
Zugehörige Handbücher
Im vorliegenden Handbuch werden Installation und Betrieb des Adept-Handbediengerätes T2
beschrieben. Außerdem sind weitere Handbücher zum Programmieren des Systems, erneuten
Konfigurieren installierter Komponenten und Hinzufügen anderer optionaler Komponenten vorhanden
(siehe Tabelle 1.2)..
Tabelle 1.2: Zugehörige Handbücher
Handbuchtitel Beschreibung
Adept SmartController Enthält ausführliche Informationen zur Installation und zum Betrieb des
Betriebsanleitung Adept SmartController und des optional erhältlichen sDIO-Produktes.
Adept ACE Online Help Beschreibt die Adept ACE Umgebung und Verwendung mit einem Adept
Steuerungssystem.
Adept Windows Online Help Beschreibt die Adept Windows Umgebung und Verwendung mit einem
Adept Steuerungssystem.
10 Adept-Handbediengerät T2 Betriebsanleitung, Rev CProgrammieren des Handbediengerätes T2
Tabelle 1.2: Zugehörige Handbücher
Handbuchtitel Beschreibung
Adept DeskTop Online Help Beschreibt die Adept DeskTop Umgebung und Verwendung mit einem
Adept Steuerungssystem.
Instructions for Adept Utility Beschreibt die Dienstprogramme für erweiterte Systemkonfigurationen,
Programs für System-Upgrades, zum Kopieren von Dateien und andere
Systemkonfigurationsvorgänge.
V+ Operating System User’s Beschreibt das Betriebssystem V+, einschließlich Dateiverwaltung,
Guide Monitorbefehlen und Monitorbefehlsprogrammen.
V+ Language User’s Guide Beschreibt die Programmiersprache V+ und die Programmierung eines
Adept-Steuerungssystems.
Adept Document Library
Die Adept Document Library (ADL) enthält Dokumentationsmaterial über Adept-Produkte.
Sie können auf diese ADL wie folgt zugreifen:
• Wählen Sie Support > Document Library aus der Menüleiste der Adept Homepage.
• Geben Sie in Ihrem Browser die folgende URL ein:
http://www.adept.com/Main/KE/DATA/adept_search.htm
Um Informationen zu einem bestimmten Thema zu erhalten, verwenden Sie die Document
Library-Suchmaschine auf der ADL-Hauptseite.
1.8 Programmieren des Handbediengerätes T2
Viele der Funktionen des Handbediengerätes sind für V+-Programme zugänglich. Beispielsweise
können über ein solches Programm Eingaben über Tastendruck empfangen, die Einstellung des
Geschwindigkeitsbalkens gelesen, LEDs ein- und ausgeschaltet und Text im Anzeigefenster des
Handbediengerätes angezeigt werden (siehe Abbildung 4.1 auf Seite 21). Eine umfassende
Übersicht über diese Funktionen erhalten Sie im V+ Language User’s Guide.
VORSICHT: Das nachfolgend beschriebene Verhalten erklärt die
Unterschiede in der Programmierung des Handbediengerätes T2
im Vergleich zum Handbediengerät MCP4.
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 11Kapitel 1 - Einführung
Das Handbediengerät T2 überträgt die Einstellungen des Geschwindigkeitsbalkens, wenn eine der
folgenden Tasten gedrückt wird: YES/+, NO/-, oder eine der +/- Tasten für die Achsen auf der rechten
Seite des Gerätes. (Das MCP4 überträgt die Geschwindigkeit immer dann, wenn der
Geschwindigkeitsregler gedrückt wird.) Darüberhinaus überträgt das T2 die Einstellung des
Geschwindigkeitsbalkens, wenn dieser gleichzeitig mit der STEP-Taste gedrückt wird.
In diesem Fall überträgt das T2 den Wert des Geschwindigkeitsbalkens bis zum Loslassen des
Geschwindigkeitsbalkens, auch wenn die STEP-Taste zuvor bereits losgelassen wurde.
Sie sollten dieses Verhalten beim Schreiben von V+-Programmen, bei denen diese Tasten gedrückt
werden müssen, berücksichtigen, da die Geschwindigkeitseingabe zu unerwarteten
Roboterbewegungen führen kann.
Als allgemeine Richtlinie sollten V+-Programmierer vorsichtig sein, wenn sie Programme schreiben,
bei denen zugleich folgende Vorgänge durchgeführt werden sollen:
• Drücken der Taste YES/+ oder NO/- und eine Eingabe mithilfe des Geschwindigkeitsbalken
• Drücken einer der sechs Tasten für die Gelenk-/Achsensteuerung (J1/X-J6/RZ)
und eine Eingabe mithilfe des Geschwindigkeitsbalkens
• Drücken der STEP-Taste und eine Eingabe mithilfe des Geschwindigkeitsbalkens
12 Adept-Handbediengerät T2 Betriebsanleitung, Rev CInstallation 2
2.1 Installation in SmartController Systeme
Schließen Sie den Stecker des Handbediengerätes an den entsprechenden Anschluss des
Adapterkabels an, siehe Abbildung 2.1 auf Seite 13.
HINWEIS: Das Handbediengerät T 2 verwendet Steckverbindungen mit
Bajonett-Verriegelung. Richten Sie beim Anbringen der Stecker die roten Punkte
aufeinander aus. Ziehen Sie die Außenhülse zurück, um den Stecker zu entfernen.
1. Wenn Sie einen Geräteschrank verwenden, kann der Adapterkabelstecker über eine
Bulkhead-Steckverbindung in die Wand montiert werden. Die Abmessungen der dafür
erforderlichen Bohrungen finden Sie in Abbildung 2.2 auf Seite 14.
2. Bringen Sie den D-Sub-Stecker des Adapters am XMCP-Anschluss des SmartController an.
SmartController
Steuerschrank
R
Sm ar t Co n t r o l l er CS
Sma rt Servo
Device Net Eth 10/100
OK HPE LAN 1.1 1.2 RS-232 RS-422/485
SF ES HD SW1
(vom Benutzer) 1 2 3
XDIO XUSR XSYS XFP XMCP XDC1 XDC2
24V
-+ -+
5A
D-Sub
Überbrückungsstecker
(im Lieferumfang des Controllers)
Hand-
bediengerät T2
T2 Adapter Kabel
(im Lieferumfang des
Handbediengerätes)
Überbrückungsstecker
(im Lieferumfang
des Handbediengerätes)
Wand oder Tür
des Steuerschrankes
Zum Controller
Vom Handbediengerät T2
Steckverbindung mit Bajonett-Verriegelung:
Ziehen Sie die Außenhülse zurück, um den Stecker zu entfernen.
Abbildung 2.1: Installation des Handbediengeräts im Geräteschrank
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 13Kapitel 2 - Installation
Rote Markierung
Ø 24,1
Breite 22,6
Abbildung 2.2: Abmessungen der Bohrung in der Schrankseitenwand
Überbrückungsstecker
Es gibt zwei Überbrückungs- oder auch Jumper-Stecker für Systeme mit dem Handbediengerät T2:
Einen D-Sub-Stecker für den XMCP-Anschluss am SmartController und einen Stecker mit
Bajonett-Verriegelung für das Adapterkabel des Handbediengerätes.
Der Not-Aus-Schalter des Handbediengerätes und die Zustimmschalter sind mit dem
Not-Aus-Schaltkreis verbunden. Aus diesem Grund muss für den Fall, dass das Kabel des
Handbediengerätes oder das Adapterkabel ausgesteckt wird, der entsprechende
Überbrückungsstecker angebracht sein. Wenn weder das Handbediengerät noch
Überbrückungsstecker angeschlossen sind, können Sie die Antriebsleistung nicht einschalten.
Wenn der Not-Aus-Schaltkreis durch Entfernen eines der Kabel oder des Überbrückungssteckers
geöffnet wird, wird die Antriebsleistung ausgeschaltet.
VORSICHT: Modifizieren oder verlängern Sie das Kabel des
Handbediengerätes nicht, da ansonsten die Garantie für das
Gerät erlischt.
WARNUNG: Der Manuell/Auto-Schlüsselschalter auf der Adept
Bedienkonsole muss auf Handbetrieb gestellt werden, wenn das T2
innerhalb der Arbeitszelle des Roboters verwendet werden soll.
Dadurch werden wichtige Sicherheitsfunktionen zum Schutz des
Bedienpersonals aktiviert, indem die Geschwindigkeit des Roboters
beschränkt wird.
14 Adept-Handbediengerät T2 Betriebsanleitung, Rev CInstallation in Robotersysteme der i-Serie
2.2 Installation in Robotersysteme der i-Serie
1. Schließen Sie den Stecker des Handbediengerätes an den entsprechenden Anschluss des
Adapterkabels an, siehe Abbildung 2.3.
HINWEIS: Das Handbediengerät T2 verwendet Steckverbindungen mit
Bajonett-Verriegelung. Richten Sie die roten Punkte beim Anbringen der Stecker
aufeinander aus. Ziehen Sie die Außenhülse zurück, um einen Stecker zu entfernen.
2. Bringen Sie den D-Sub-Stecker des Adapters am XMCP-Anschluss des XPANEL-Kabels an.
XUSR XPANEL-Kabel
(im Lieferumfang von
Robotern der i-Serie)
Schnittstellenfeld
eines Roboters der i-Serie
XFP
1
T2 Adapterkabel GND XSLV 2
(im Lieferumfang des Handbediengerätes) SmartServo
Handbedien-
gerät T2 +24V
DC INPUT
(24 VDC)
AC INPUT
(200-240 VAC 1F ) XIO XPANEL RS-232
XMCP
Jumper-Stecker
(im Lieferumfang von
Überbrückungsstecker Robotern der i-Serie)
(im Lieferumfang des
Handbediengerätes)
Abbildung 2.3: Installation des Handbediengerätes in einem Cobra-System der i-Serie
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 15Kapitel 2 - Installation
2.3 Anbringen der optionalen Wandhalterung
Die optionale Wandhalterung kann für den stationären Betrieb oder zur Aufbewahrung des
Handbediengerätes T2 verwendet werden. Weitere Informationen zu den Abmessungen der
Halterung finden Sie in Abbildung 2.4.
201,4
100
56,.2
6
J
31,4
6
Detailansicht J:
100
6
226
6
K Detailansicht K:
Wandhalterung, Vorderansicht
118
39,6
392,9
Alle Maße in mm
Kabel-
Wandhalterung, Rück- und Seitenansicht aufhängung
Abbildung 2.4: Abmessungen der Wandhalterung
16 Adept-Handbediengerät T2 Betriebsanleitung, Rev CKennzeichnung von
Bedienelementen und
Anzeigen 3
3.1 Bedienelemente und Anzeigen
USB Anschluss
(befindet sich unter einer Funktionsauswahltasten (6) Not-Aus-Schalter
Schutzabdeckung)
Taste zum
LED für die
Einschalten der
Steuerung über
Antriebsleistung
das Handgerät
Taste zum
Ausschalten der
Antriebsleistung Tasten zur
LED für die Steuerung der
Roboterantriebs- Gelenke/Achsen(6)
leistung
MODE-Taste
REC/DONE-
Taste
Abbildung 3.1: Adept-Handbediengerät T2
Tabelle 3.1: Steuerfunktionen des Handbediengerätes T2
Not-Aus-Schalter Das Drücken dieses Schalters stoppt das aktuell ausgeführte
Roboterprogramm und schaltet die Antriebsleistung sofort aus.
Wenn der Roboter mit Bremsen ausgestattet ist, werden diese aktiviert.
Funktionsauswahl- Durch Drücken eines Pfeils wird die Funktion rechts von dieser Taste
tasten ausgewählt.
Tasten zur Steuerung Durch Drücken einer „+“-Taste wird eine Achse (1 - 6) oder Richtung
der Gelenke/Achsen ausgewählt und in die positive Richtung bewegt.
Durch Drücken einer „-“-Taste wird eine Achse (1 - 6) oder Richtung
ausgewählt und in die negative Richtung bewegt.
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 17Kapitel 3 - Kennzeichnung von Bedienelementen und Anzeigen
Tabelle 3.1: Steuerfunktionen des Handbediengerätes T2
MODE-Taste Durch Drücken dieser Taste wählen Sie den WORLD-, TOOL-, JOINT-
oder FREE-Modus aus und kehren dann zum COMP-Modus zurück.
Die Anzeige erfolgt in der Betriebsmodusanzeige rechts.
Hinweis: Wenn das System durch Drücken von COMP/PWR auf dem
Touchscreen oder der Taste zum Einschalten der Antriebsleistung in den
COMP-Modus versetzt wird, führt nachfolgendes Drücken der
MODE-Taste dazu, dass das Handbediengerät in den zuletzt durch das
Bedienpersonal verwendeten Handbetriebsmodus springt.
LED für die Steuerung Diese LED zeigt an, dass der Roboter über das Handbediengerät
über das Handbedien- gesteuert wird.
gerät
Taste zum Ausschalten Mit dieser Taste wird die Antriebsleistung zum Roboter ausgeschaltet.
der Antriebsleistung Im Gegensatz zum Not-Aus-Schalter wird mit der Taste zum Ausschalten
der Antriebsleistung ein kontrollierter Stopp herbeigeführt, wobei der
Roboter softwaregesteuert heruntergebremst wird. Wenn der Roboter
vollständig angehalten ist, wird die Stromzufuhr abgschaltet.
Taste zum Einschalten Mit dieser Taste wird die Antriebsleistung zum Roboter eingeschaltet,
der Antriebsleistung indem die Sequenz zum Einschalten der Stromzufuhr gestartet wird,
welche das Drücken der Taste für die Antriebsleistung an der
Bedienkonsole einschließt (siehe Abschnitt 4.2 auf Seite 23).
REC/DONE-Taste Diese Taste verhält sich wie die Eingabetaste auf einer Standardtastatur.
Nach erfolgter Dateneingabe wird die Eingabe durch Drücken von
REC/DONE an den Controller gesendet. Häufig werden Benutzer von
Anwendungs- programmen dazu aufgefordert, die REC/DONE-Taste
zu drücken, um dem Programm zurückzumelden, dass sie eine Aufgabe
abgeschlossen haben.
LED für die Roboter- Diese LED zeigt an, dass die Antriebsleistung zum Roboter eingeschaltet
antriebsleistung ist. Die LED blinkt am Anfang für drei bis vier Sekunden und leuchtet
dann permanent, wenn die Antriebsleistung aktiviert ist.
USB Anschluss Verbindung für einen USB Memory Stick zur Übertragung
von Software-Updates auf das Handbediengerät T2.
18 Adept-Handbediengerät T2 Betriebsanleitung, Rev CZustimmschalter
3.2 Zustimmschalter
Das Handbediengerät T2 ist mit zwei 3-stufigen Zustimmschaltern ausgestattet, einem auf der linken
und einem auf der rechten Seite des Geräts. Dadurch ist die Bedienung des Schalters sowohl mit der
linken als auch mit der rechten Hand möglich. Die beiden Zustimmschalter haben dieselbe Funktion und
sind parallel geschaltet. D.h., für den Betrieb reicht die Aktivierung eines der beiden Zustimmschalter
aus.
3-stufiger Zustimmschalter
(1 von 2, auf beiden Seiten des Gerätes)
Das Bedienelement besteht aus zwei symmetrisch angeordneten Schiebern. Die Position dieser
Schieber wird über elektrische Schalter erfasst und an die Auswerteelektronik übertragen.
Tabelle 3.2: Positionen des Zustimmschalters
Position Funktion Zustimm- Kontakte
schalter
1 Grundstellung Schalter ist nicht gedrückt Kontakte sind offen
2 Aktivierung Schalter ist gedrückt Kontakte sind geschlossen
3 Panik Schalter ist fest gedrückt Kontakte sind offen
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 19Betrieb 4
4.1 Hauptmenü - Übersicht
Das Hauptmenü wird beim Einschalten des Handbediengerätes T2 angezeigt.
Um eine der Funktionen auszuwählen, drücken Sie:
• eine der Funktionsauswahltasten, die sich auf der linken Seite des Touchscreens befinden.
-- oder --
• eine der Menü-Tasten, wie z. B. COMP/PWR oder PROG SET.
Displayfenster des
HINWEIS: Die Handbediengerätes
hellgrauen Tasten
Multifunktionstasten
des Hauptmenüs
sind berührungs-
empfindlich.. Betriebsmodus-
anzeige
USER
Anzeige Geschwindigkeits-
balken
Abbildung 4.1: Hauptmenü des Handbediengerätes T2
Tabelle 4.1: Übersicht über die Funktionen des Hauptmenüs
EDIT Mit dieser Taste können Positionsvariablen und globale REAL-Variablen, die von
V+-Programmen verwendet werden, bearbeitet werden.
Weitere Informationen erhalten Sie in Abschnitt 4.7 auf Seite 31.
DISP Zeigt JOINT, WORLD, STATUS, I/O oder den letzten Fehler auf dem Display des
Handbediengerätes an. Weitere Informationen erhalten Sie in Abschnitt 4.8 auf Seite 33.
CLR ERR Löscht angezeigte Fehlermeldungen.
Weitere Informationen erhalten Sie in Abschnitt 4.9 auf Seite 34.
CMD Diese Funktion zeigt AUTO START, CALIBRATE, STORE ALL, CMD1und CMD 2 an.
Weitere Informationen erhalten Sie in Abschnitt 4.10 auf Seite 35.
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 21Kapitel 4 - Betrieb
Tabelle 4.1: Übersicht über die Funktionen des Hauptmenüs
RUN/HOLD Startet und beendet ein Programm.
Weitere Informationen erhalten Sie in Abschnitt 4.11 auf Seite 36.
STEP Drücken Sie die STEP-Taste im Handbetrieb, um in einem Programm Bewegung zu initiieren.
Weitere Informationen erhalten Sie in Abschnitt 4.13 auf Seite 38.
SLOW Wählt zwischen den zwei verschiedenen Geschwindigkeitsbereichen des
Geschwindigkeitsbalkens. Wenn die LED der SLOW-Taste leuchtet, ist der langsame
Geschwindigkeitsbereich ausgewählt. Dieser Bereich umfasst 0 - 25 % der normalen,
auf dem Handbediengerät einstellbaren Geschwindigkeit. Drücken Sie die SLOW-Taste
erneut, um zur normalen Geschwindigkeit zurückzukehren.
F1, F2, Dev/F3 Programmierbare Funktionstasten, die in Benutzeranwendungen verwendet werden.
Umfasst das System mehr als einen Roboter, wird mit der Dev/F3-Taste ausgewählt,
welcher Roboter aktiv ist.
COMP Wenn die Antriebsleistung eingeschaltet ist und sich das System im Handbetrieb befindet,
PWR wird mit dieser Taste der Computermodus ausgewählt. Wenn sich das System im
AUTO-Modus befindet und die Antriebsleistung ausgeschaltet ist, wird mit dieser Taste die
Antriebsleistung eingeschaltet und der Computermodus ausgewählt.
Weitere Informationen erhalten Sie in Abschnitt 4.5 auf Seite 26.
Ziffern- Diese Tasten dienen zur Eingabe von Daten und ähneln denen des Nummernblocks auf einer
tasten 0-9 Standardtastatur.
DEL Diese Taste verhält sich wie die Rücktaste auf einer Standardtastatur. Wenn Daten
eingegeben werden, erscheinen diese auf dem Display des Handbediengerätes.
DEL löscht alle Zeichen, die auf der Anzeige des Handbediengerätes erscheinen,
deren Eingabe jedoch nicht mit der REC/DONE- Taste bestätigt wurde.
Anwendungsprogramme können auch der DEL-Taste spezielle Funktionen zuweisen.
YES+/NO- Wenn die T1-Taste ausgewählt ist, drücken Sie auf YES/+, um den Greifer zu öffnen, bzw.
auf NO/-, um ihn zu schließen. Diese Taste wird auch zum Beantworten von Rückfragen
eines Programms verwendet. Die verwendeten Greifersignale müssen in den
Roboterspezifikationen konfiguriert sein.
T1 Durch Drücken dieser Taste wird die Funktion zum Öffnen und Schließen des Greifers aktiviert,
sofern Ventile installiert sind (siehe oben in den Angaben zur YES/NO-Taste).
Weitere Informationen erhalten Sie in Abschnitt 4.14 auf Seite 38.
PROG SET Zum Auswählen eines neuen Programms und Festlegen von Parametern.
Weitere Informationen erhalten Sie in Abschnitt 4.12 auf Seite 37.
Robot: Zeigt an, welcher Roboter mit dem Handbediengerät gesteuert wird.
Betriebs- Die Betriebsmodusanzeige zeigt den aktiven Betriebsmodus an:
modus- COMP, WORLD, TOOL, JOINT, oder FREE.
anzeige Wird kein Betriebsmodus als aktiv angezeigt, ist der Betriebsmodus „Off“ aktiv.
22 Adept-Handbediengerät T2 Betriebsanleitung, Rev CEin- und Ausschalten der Antriebsleistung
Tabelle 4.1: Übersicht über die Funktionen des Hauptmenüs
Geschwindig- Legt die Geschwindigkeit des Roboters als Prozentwert der Maximal- geschwindigkeit fest.
keitsbalken Der Wert für die Geschwindigkeit wird rechts vom Geschwindigkeitsbalken angezeigt.
Drücken Sie auf den Schieberegler und ziehen Sie ihn auf die gewünschte Geschwindigkeit
oder drücken Sie auf die entsprechende Stelle des Balkens.
System Menu Öffnet das Dialogfeld „System Menu“. Hier können Sie Kontrast und Helligkeit des Bildschirms
einstellen, den Touchscreen kalibrieren, den Bildschirm reinigen und die Firmware aktualisieren
und den Bildschirmschoner ein- und ausschalten.
Weitere Informationen erhalten Sie in Abschnitt 4.16 auf Seite 39.
User Feld in der oberen linken Ecke, das bei Nichtaktivität dunkel ist. Die USER-Anzeige leuchtet
um anzuzeigen, dass ein Anwendungsprogramm das Handbediengerät verwendet.
Blinkt diese Anzeige, bedeutet dies, dass ein Anwendungs- programm ausgesetzt wird.
Drücken Sie die REC/DONE-Taste, um dieses Programm fortzusetzen.
4.2 Ein- und Ausschalten der Antriebsleistung
Einschalten der Antriebsleistung mit dem Handbediengerät T2
Im Automatikbetrieb
1. Stellen Sie sicher, dass der Schlüsselschalter auf der Bedienkonsole auf „Auto“
(Automatikbetrieb) gestellt ist.
2. Drücken Sie auf dem Handbediengerät die Taste zum Einschalten der Antriebsleistung
bzw. die Taste COMP/PWR.
3. Drücken Sie den blinkenden Schalter für die Antriebsleistung auf der Bedienkonsole.
4. Nach drei bis vier Sekunden wird die Antriebsleistung für den Roboter eingeschaltet
und die Robot Power-LED auf dem Handbediengerät leuchtet.
5. Der nächste Schritt eines typischen Systemstarts ist die Kalibrierung des Roboters.
Weitere Informationen erhalten Sie in Abschnitt 4.3 auf Seite 25.
Wurde der Roboter bereits kalibriert, ist dieser Schritt nicht notwendig.
HINWEIS: Das Handbediengerät T2 wurde für die Verwendung mit
CAT-3-SmartControllern entwickelt. Wird das T2 in einem System verwendet, das
keinen CAT-3-SmartController enthält, muss der Zustimmschalter sowohl im
Automatik- als auch im Handbetrieb gedrückt werden.
Weitere Informationen finden Sie im Adept SmartController User’s Guide.
Im Handbetrieb
1. Stellen Sie sicher, dass der Schlüsselschalter auf der Bedienkonsole auf „Manual“
(Handbetrieb) gestellt ist.
2. Falls ein Fehler aufgetreten ist, leuchtet die LED auf der CLR ERR-Taste.
Drücken Sie die CLR ERR-Taste immer wieder, bis alle Fehlermeldungen gelöscht sind.
3. Drücken Sie die Taste zum Einschalten der Antriebsleistung auf dem Handbediengerät.
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 23Kapitel 4 - Betrieb
4. Drücken Sie den Zustimmschalter des Handbediengerätes in die mittlere Position.
Lassen Sie den Schalter los, drücken ihn erneut und halten ihn gedrückt.
5. Drücken Sie den blinkenden Schalter für die Antriebsleistung auf der Bedienkonsole.
6. Nach drei bis vier Sekunden wird die Antriebsleistung für den Roboter eingeschaltet
und die Robot Power-LED auf dem Handbediengerät leuchtet.
Ausschalten der Antriebsleistung mit dem Handbediengerät T2
Es gibt vier Möglichkeiten, die Antriebsleistung über das Handbediengerät auszuschalten:
• Drücken der Taste zum Ausschalten der Antriebsleistung
• Drücken des Not-Aus-Schalters
• Loslassen des Zustimmschalters (diese Option ist verfügbar, wenn der Schlüsselschalter auf der
Bedienkonsole auf Handbetrieb eingestellt ist)
• Trennen des Handbediengerätes vom Anschluss
Einschalten der Antriebsleistung nach einem Not-Aus
Um die Antriebsleistung nach Drücken des Not-Aus-Schalters auf dem Handbediengerät wieder
einzuschalten, gehen Sie wie folgt vor:
1. Drehen Sie den Not-Aus-Schalter nach rechts (im Uhrzeigersinn).
Der Schalter ist gefedert und kehrt in die Ausgangsposition zurück.
2. Falls sich das System im Handbetrieb befindet und ein Fehler aufgetreten ist,
leuchtet die LED auf der CLR ERR-Taste.
Drücken Sie die CLR ERR-Taste immer wieder, bis alle Fehlermeldungen gelöscht sind.
3. Falls sich die Bedienkonsole im Handbetrieb befindet, drücken Sie den Zustimmschalter.
Dieser Schritt ist im Automatikbetrieb nicht erforderlich. Die Antriebsleistung kann nun durch
Drücken der COMP/PWR-Taste bzw. der Taste zum Einschalten der Antriebsleistung
eingeschaltet werden.
4. Drücken Sie den blinkenden Schalter für die Antriebsleistung auf der Bedienkonsole.
Die Antriebsleistung wird eingeschaltet.
Einschalten der Antriebsleistung nach dem Loslassen des
Zustimmschalters
Wenn sich die Bedienkonsole im Handbetrieb befindet und Sie den Zustimmschalter loslassen (bzw.
auf Position 3 schalten), schaltet sich das System kontrolliert aus. Dadurch wird das System in einen
anderen Zustand versetzt als durch das Drücken des Not-Aus-Schalters. Zum Einschalten der
Antriebsleistung gehen Sie wie folgt vor:
1. Drücken Sie den Zustimmschalter.
2. Falls sich das System im Handbetrieb befindet und ein Fehler aufgetreten ist,
leuchtet die LED auf der CLR ERR-Taste.
Drücken Sie die CLR ERR-Taste immer wieder, bis alle Fehlermeldungen gelöscht sind.
24 Adept-Handbediengerät T2 Betriebsanleitung, Rev CKalibrierung mit dem Handbediengerät T2
3. Die Antriebsleistung kann nun durch Drücken der COMP/PWR-Taste bzw.
der Taste zum Einschalten der Antriebsleistung eingeschaltet werden.
HINWEIS: Die Ausnahme ist, wenn der SmartController in einem
SmartModules-System mit einer PDU2-Einheit verwendet wird.
In diesem Fall müssen Sie den blinkenden Schalter für die Antriebsleistung
auf der Bedienkonsole drücken.
4.3 Kalibrierung mit dem Handbediengerät T2
Nach dem Einschalten der Antriebsleistung muss ein Roboter kalibriert werden.
Dieser Vorgang kann sich je nach verwendetem Roboter unterscheiden.
Hinweise zur Kalibrierung des verwendeten Roboters finden Sie in der entsprechenden
Dokumentation. Im Folgenden werden zwei Beispiele für typische und spezielle Vorgänge erläutert.
Typische Kalibrierung
1. Stellen Sie sicher, dass die folgenden Bedingungen erfüllt sind:
• Schlüsselschalter auf der Bedienkonsole ist auf Automatikbetrieb gestellt
• Antriebsleistung für den Roboter ist eingeschaltet (Robot Power-LED leuchtet)
• Handbediengerät befindet sich im COMP-Modus
2. Drücken Sie die CMD-Taste und anschließend die Multifunktionstaste CALIB.
3. Die Kalibrierung wird durchgeführt und die RUN/HOLD-LED leuchtet
ein bis zwei Sekunden lang. Die LED geht aus, wenn die Kalibrierung abgeschlossen ist.
Kalibrierung im Sonderfall
Diesen Vorgang können Sie anwenden, wenn Sie vor der Kalibrierung eines Roboters die Position
des Armes verändern müssen. Dies könnte beispielsweise erforderlich sein, wenn ein Hindernis in
der Arbeitszelle ist, das sich auf die Kalibrierung auswirkt oder wenn der Roboter in einer Position
ausgeschaltet wurde, in der das Gelenk nicht im üblichen Bereich war.
1. Stellen Sie sicher, dass die Antriebsleistung für den Roboter eingeschaltet ist.
2. Drücken Sie die MODE-Taste, um den Gelenkmodus (JOINT) des Handbediengerätes
aufzurufen. Es sind keine anderen Steuer-Modi verfügbar.
3. Bewegen Sie den Roboter mit einer der Gelenk-Steuertasten in die erforderliche Position.
4. Drücken Sie die COMP/PWR-Taste oder die Taste zum Einschalten der Antriebsleistung
(nicht die MODE-Taste), um in den COMP-Modus zurückzuwechseln.
5. Sie können nun die Kalibrierung durchführen, indem Sie die obigen Anweisungen
für eine typische Kalibrierung befolgen.
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 25Kapitel 4 - Betrieb
4.4 Funktionsbeschreibungen
Vordefinierte Funktionstasten
Die vordefinierten Funktionstasten umfassen, EDIT, DISP, CLR ERR, CMD und PROG SET.
Diese Tasten haben jeweils eine ihnen zugewiesene spezifische, für das ganze System
geltende Funktion. Drücken Sie die Funktionsauswahltaste links von einer Funktion, um
diese auszuwählen.
HINWEIS: Die PROG SET-Taste ist eine Touchscreen-Taste.
Programmierbare Funktionstasten
F1, F2 und DEV/F3 sind programmierbare Funktionstasten. Sie werden in benutzerabhängigen
Anwendungsprogrammen verwendet. Ihre Funktion variiert abhängig vom ausgeführten Programm.
Weitere Informationen zu diesen Funktionstasten finden Sie in der Dokumentation Ihrer
Anwendungsprogramme..
Umfasst das System mehr als einen Roboter, wird mit der DEV/F3-Taste ausgewählt,
welcher Roboter aktiv ist. Weitere Details finden Sie unter Abschnitt 4.15 auf Seite 39.
Multifunktionstasten
Je nach ausgeführtem Anwendungsprogramm oder für die vordefinierten Funktionstasten getroffener
Auswahl haben die Multifunktionstasten unterschiedliche Funktionen. Immer wenn eine
Multifunktionstaste aktiv ist, wird ihre Funktion in der unteren Zeile der LCD-Anzeige auf dem
Handgerät angezeigt. Da diese Tasten keine feststehenden Bezeichnungen haben (diese werden durch
das jeweils verwendete Programm definiert), werden sie als „Multifunktionstasten“ bezeichnet.
4.5 Im Computermodus (COMP)
Den Computermodus (COMP) können Sie durch Drücken der COMP/PWR-Taste bzw. durch
mehrmaliges Drücken der MODE-Taste auswählen. Der COMP-Modus ist aktiv, wenn die LED
der COMP/PWR-Taste leuchtet und in der Betriebsmodusanzeige die LED neben COMP leuchtet.
Im Computermodus wird der Roboter von einem ausgeführten Programm oder einem Systemterminal
gesteuert.
Wenn die Antriebsleistung eingeschaltet ist und sich das System nicht im COMP-Modus befindet,
wird mit der COMP/PWR-Taste der Computermodus ausgewählt. Wenn sich das System im
Automatikbetrieb befindet und die Antriebsleistung ausgeschaltet ist, wird mit der COMP/PWR-Taste
die Antriebsleistung eingeschaltet und der Computermodus ausgewählt.
26 Adept-Handbediengerät T2 Betriebsanleitung, Rev CSteuermodi des Handbediengerätes
Betriebsmodus „Off“
Der Betriebsmodus „Off“ erscheint, wenn sich das Handgerät nicht im COMP- oder einem anderen
Steuermodus befindet. Es handelt sich hierbei um eine Schutzmaßnahme. Wenn der Schlüsselschalter
auf der Bedienkonsole von Auto- auf Handbetrieb umgestellt wird, wird die Antriebsleistung
ausgeschaltet und das Handbediengerät wechselt in den Betriebsmodus „Off“.
Der „Off“-Modus ist aktiv, wenn keiner der anderen Betriebsmodi in der entsprechenden Anzeige
aufleuchtet, siehe Abbildung 4.2. Ein Betriebsmodus ist aktiv, wenn die entsprechende Anzeige
leuchtet. Leuchtet diese nicht, ist der entsprechende Betriebsmodus inaktiv.
Abbildung 4.2: Betriebsmodusanzeige bei aktivem Betriebsmodus „Off“
Hintergrundzustand
Das Handbediengerät läuft im Hintergrundzustand, wenn es sich im COMP-Modus befindet und keine
vordefinierten Funktionen ausgewählt sind. Sie müssen die Taste REC/DONE einmal oder mehrmals
drücken, um vordefinierte Funktionen zu löschen. Wenn der Hintergrundzustand aktiviert ist, kann ein
V+ Programm angefügt werden. Wenn dies erfolgt, übernimmt das V+ Programm die Steuerung und
die USER-LED leuchtet.
4.6 Steuermodi des Handbediengerätes
Die Steuermodi des Handbediengerätes umfassen WORLD, TOOL, JOINT und FREE.
Ist die Antriebsleistung eingeschaltet und der Roboter kalibriert, kann durch Drücken der MODE-Taste
auf dem Handbediengerät durch diese vier Modi gewechselt werden. Der ausgewählte Modus wird in
der Betriebsanzeige durch eine leuchtende LED neben dem jeweiligen Namen angezeigt. Ist einer der
Betriebsmodi aktiv, leuchtet die Pendant Control-LED.
HINWEIS: Wenn das System durch Drücken der COMP/PWR-Taste auf dem
Touchscreen oder durch Drücken der Taste für das Einschalten der Antriebsleistung
in den COMP-Modus versetzt wird, führt ein nachfolgendes Drücken der
MODE-Taste dazu, dass das Handbediengerät in den zuletzt durch das
Bedienpersonal verwendeten Handbetriebmodus springt.
WORLD-Modus
Ist der WORLD-Modus ausgewählt, verläuft die Bewegung in X-, Y- oder Z-Richtung parallel zu einer
der Achsen eines Weltkoordinatensystems.
Wählen Sie mithilfe der Gelenksteuertasten eine Bewegungsachse (siehe Abbildung 4.3).
Durch Drücken der Taste „+“ bewegen Sie den Roboter-Werkzeugflansch in die positive Richtung.
Durch Drücken der Taste „-“ bewegen Sie den Werkzeugflansch in die negative Richtung.
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 27Kapitel 4 - Betrieb
+Z
T2 Richtungssteuertasten
X X-Richtung
Y Y-Richtung
Z Z-Richtung
+Y
RX RX-Drehung
(nicht bei SCARA Robotern)
RY RY-Drehung
(nicht bei SCARA Robotern)
RZ RZ-Drehung
+RZ (CCW)
+X
Abbildung 4.3: WORLD-Modus (SCARA-Roboter mit vier Achsen)
28 Adept-Handbediengerät T2 Betriebsanleitung, Rev CSteuermodi des Handbediengerätes
TOOL-Modus
Ist der TOOL-Modus ausgewählt, verläuft die Bewegung in X-, Y- oder Z-Richtung entlang einer der
Achsen des Werkzeugkoordinatensystems. Das Werkzeugkoordinatensystem hat seinen Nullpunkt in
der Mitter des Roboter-Werkzeugflansches, wobei die Z-Achse vom Flansch wegzeigt. Bei den meisten
Robotern verläuft die positive X-Achse entlang der Mitte der Keilnut des Werkzeugflansches.
Wählen Sie mithilfe der Gelenksteuertasten eine Bewegungsachse (siehe Abbildung 4.4).
Durch Drücken der Taste „+“ bewegen Sie den Roboter-Werkzeugflansch in die positive Richtung.
Durch Drücken der Taste „-“ bewegen Sie den Werkzeugflansch in die negative Richtung.
Bei einem Roboter mit vier Achsen erfolgt die positive Rotation des Greifers (RZ) von oben betrachtet
im Uhrzeigersinn.
HINWEIS: In Abbildung 4.4 wird davon ausgegangen, dass die
TOOL-Transformation auf NULL gesetzt ist. (Alle Werte sind gleich 0.) Wenn eine
TOOL-Transformtion angewendet wird, ist das Werkzeugkoordinatensystem um den
Wert der TOOL-Transformation verschoben und gedreht. Jede Bewegung im
TOOL-Modus wird nun relativ zum verschobenen Koordinatensystem und nicht mehr
zur Mitte des Werkzeugflansches vorgenommen. . Weitere Informationen zu
TOOL-Transformationen finden Sie im V+ Language Reference Guide .
T2 Richtungssteuertasten
X X-Richtung
Y Y-Richtung
Z Z-Richtung
RX RX-Drehung
(nicht bei SCARA-Robotern)
RY RY-Drehung
(nicht bei SCARA-Robotern)
+Y Drehung um die
RZ
Z-Achse des Werkzeuges
+X +RZ
+Z
Abbildung 4.4: TOOL-Modus (SCARA-Roboter mit vier Achsen)
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 29Kapitel 4 - Betrieb
JOINT-Modus
Ist der JOINT-Modus ausgewählt, werden Bewegungen um die Achse des angegebenen Gelenks
ausgeführt. Abbildung 4.5 zeigt einen SCARA-Roboter von Adept mit drei Rotationsgelenken
(Gelenke 1, 2 und 4) und einem Translationsgelenk (Gelenk 3). Die positive Rotation der Gelenke
1 und 2 erfolgt von oben gesehen gegen den Uhrzeigersinn. Die positive Rotation des Gelenkes 4
erfolgt von oben gesehen im Uhrzeigersinn. Die positive Bewegung des Gelenkes 3 erfolgt abwärts.
Wählen Sie mithilfe der Gelenksteuertasten ein Bewegungsgelenk (siehe Abbildung 4.5).
Durch Drücken der Taste „+“ bewegen Sie das Robotergelenk in die positive Richtung.
Durch Drücken der Taste „-“ bewegen Sie das Robotergelenk in die negative Richtung.
Bei verschiedenen Robotern oder Steuerungsgeräten werden den Gelenken unterschiedliche Nummern
zugewiesen. Wenn Sie zum ersten Mal einen Ihnen nicht vertrauten Roboter im JOINT-Modus
bewegen, setzen Sie die Monitorgeschwindigkeit auf höchstens 10. Stellen Sie den Roboter in einem
sicheren Bereich auf und gehen Sie bei der Bewegung des Roboters möglichst vorsichtig vor.
Verwenden Sie dabei die verschiedenen Gelenknummern, um zu überprüfen, wie die Bewegungen
über das Handgerät gesteuert werden. Weitere Informationen über die Zuweisungen für Gelenke
finden Sie in der Dokumentaiton der von Ihnen verwendeten Bewegungsgeräte.
T2 Gelenksteuertasten
Gelenk 2
J1 Gelenk 1
J2 Gelenk 2
Gelenk 1
J3 Gelenk 3
J4 Gelenk 4
J5 Gelenk 5
(nicht bei SCARA-Robotern)
Gelenk 3
J6 Gelenk 6
Gelenk 4
(nicht bei SCARA-Robotern)
Abbildung 4.5: JOINT-Modus (SCARA-Roboter mit vier Achsen)
30 Adept-Handbediengerät T2 Betriebsanleitung, Rev CBearbeitungsfunktion
FREE-Modus
Ist der FREE-Modus ausgewählt, sind bestimmte Gelenke von der Servosteuerung „freigegeben“ und
die Roboterbremsen werden (falls vorhanden) gelöst. Im Gegensatz zu anderen Modi haben Sie im
FREE-Modus verschiedene Auswahlmöglichkeiten, um mithilfe der Gelenksteuertasten so viele Gelenke
wie erforderlich aus der Servosteuerung zu nehmen. In manchen Fällen, wie beispielsweise bei den
Gelenken 1 und 2 auf einem AdeptOne Roboter, können mehrere Gelenke mit nur einer einzigen Taste
freigeschaltet werden.
HINWEIS: Bei manchen Robotern kann der FREE-Modus für einzelne oder alle
Gelenke vom Hersteller deaktiviert worden sein.
Sobald Sie die COMP/PWR-Taste drücken oder einen anderen Modus auswählen,
sind alle Gelenke wieder servogesteuert und können nicht frei bewegt werden.
Die Gelenkzuweisungen im FREE-Modus sind dieselben wie die im JOINT-Modus.
Weitere Informationen erhalten Sie in Abbildung 4.5 auf Seite 30.
WARNUNG: Sobald mithilfe der Gelenksteuertasten ein Gelenk
ausgewählt wird, hat das betreffende Gelenk Bewegungsfreiheit
(in manchen Fällen können mehrere Gelenke gleichzeitig
freigeschaltet werden). Oft reicht das Gewicht, das auf einem
Gelenk lastet, aus, um das Gelenk zu bewegen und Schaden
anzurichten oder Verletzungen hervorzurufen.
Wenn beispielsweise Gelenk 3 auf einem SCARA- oder einem
kartesischen Roboter freigeschaltet wird, kann das Gelenk bis ans
Ende seiner Wegstrecke abgleiten. In Robotern mit Gliedern,
können aufgrund eines Gelenkes, das freigeschaltet wird, mehrere
Glieder des Roboters abgleiten. Seien Sie bei der Auswahl eines
Gelenkes im FREE-Modus besonders vorsichtig.
4.7 Bearbeitungsfunktion
Mit der Funktionstaste EDIT können Positionsvariablen und globale REAL-Variablen, die von
V+-Programmen verwendet werden, bearbeitet werden.
Abbildung 4.6: EDIT-Funktionstaste
REAL Drücken Sie die Multifunktionstaste REAL und das Handbediengerät zeigt Folgendes an:
SELECT REAL VARIABLE TO EDIT
var1 var2 var3 var4
Adept-Handbediengerät T2 Betriebsanleitung, Rev C 31Kapitel 4 - Betrieb
var1, var2, usw. sind Namen für globale Variablen. Drücken Sie die Multifunktionstaste unter dem
Variablennamen, um diese Variable zu bearbeiten. Die Multifunktionstaste mit der Bezeichnung
wird nur dann angezeigt, wenn sich im Systemspeicher mehr als fünf globale REAL-Variablen
befinden. Nach Auswahl einer Variablen zeigt das Handbediengerät Folgendes an:
var.name = xxx
CHANGE TRUE FALSE
(Wenn die bearbeitete Variable aus einem Array kommt, wird eine zusätzliche Multifunktionstaste
angezeigt, mit der Sie den Index der zu bearbeitenden Variable angeben können.)
Drücken Sie die Multifunktionstaste TRUE, um der Variablen den booleschen Wert für „wahr“ (-1)
zuzuweisen. Drücken sie FALSE, um der Variablen den Wert „falsch“ (0) zuzuweisen.
Um den Wert der Variablen zu ändern, drücken Sie die mit CHANGE bezeichnete Multifunktionstaste.
Das Handbediengerät zeigt Folgendes an:
var.name = _
CHANGE TRUE FALSE
Der Variablenwert wird durch die Eingabemarke (Unterstrich) ersetzt. Geben Sie mithilfe der Tasten
für die Dateneingabe einen neuen Wert ein und schließen Sie Ihre Eingabe ab, indem Sie die Taste
REC/DONE drücken.
LOC Drücken Sie die Multifunktionstaste LOC. Das Handbediengerät zeigt Folgendes an:
SELECT LOCATION VARIABLE TO EDIT
loc1 loc2 loc3 loc4
Drücken Sie die Multifunktionstaste unter dem Variablennamen, um diese Variable zu bearbeiten.
Die Multifunktionstaste mit der Bezeichnung wird nur dann angezeigt, wenn sich im
Systemspeicher mehr als fünf globale Positionsvariablen befinden.
Nach Auswahl einer Variablen zeigt das Handbediengerät Folgendes an:
loc.name: X = 500
CHANGE NEXT HERE
(Wenn die bearbeitete Variable aus einem Array kommt, wird eine zusätzliche Multifunktionstaste
angezeigt, mit der Sie den Index der zu bearbeitenden Variable angeben können.)
Nach Auswahl eines Präzisionspunktes zeigt das Handbediengerät Folgendes an:
#loc.name: JT2 pendant = -210
CHANGE NEXT HERE
Drücken Sie die Multifunktionstaste CHANGE, um die angezeigte Komponente der Positionsvariablen
zu ändern. Der bisherige Wert verschwindet aus der Anzeige und wird durch die Eingabemarke
ersetzt. Geben Sie mithilfe der Tasten für die Dateneingabe einen neuen Wert ein und schließen Sie
Ihre Eingabe ab, indem Sie die Taste REC/DONE drücken.
Drücken Sie die Multifunktionstaste NEXT, um die nächste Komponente der Positionsvariablen
anzuzeigen. Der X-, Y-, Z-, y(aw)-, p(itch)-, und r(oll)-Wert werden hintereinander angezeigt. Der X-, Y-,
und Z-Wert werden in Millimetern, der y(aw)-, p(itch)- und r(oll)-Wert in Grand angegeben. Wenn ein
Präzisionspunkt bearbeitet wird, werden die Gelenkwerte für alle Gelenke des Roboters hintereinander
angezeigt.
32 Adept-Handbediengerät T2 Betriebsanleitung, Rev CSie können auch lesen

















































