Akustische 3D-Unterwasserinspektion bei Kraftwerks-anlagen
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
1 Akustische 3D-Unterwasserinspektion bei Kraftwerks- anlagen Erwin HEINE1 und Christian STÄUBLE2 1 Universität für Bodenkultur Wien · erwin.heine@boku.ac.at 2 Verbund Hydro Power GmbH · christian.staeuble@verbund.at Zusammenfassung Verbund setzt seit etwa 1960, beginnend mit Single Beam Echoloten und um 2005 ergänzt durch Multibeam-Vermessungslote, akustische Verfahren zur Erfassung von Gewässer- sohlenhöhen und Unterwasserinspektion bei Kraftwerksanlagen ein. In Anbetracht von „Digitalisierung - Industrie 4.0“ hat sich VERBUND Hydro Power nun im Rahmen des Ini- tialprojektes „Digitales Kraftwerk“ entschlossen, neue Messsystem und Verfahren hinsicht- lich Praxistauglichkeit zu testen, und einzusetzen. Beginnend mit der Erhebung der umfangreichen Anforderungen und Prozesse des Kraft- werkbetriebes werden die aktuell neuesten, an Kraftwerksanlagen einsetzbaren Sonarsys- teme, der Auswahlprozess, sowie die Ergebnisse der bis dato durchgeführten Praxistests vorgestellt. Den Schwerpunkt stellt dabei das Echtzeit-3D-sonar „Echoscope“ dar, welches insbesondere in der Inspektion der Unterwasseranlagenteile eine herausragende Stellung einnimmt. 1 Motivation und Aufgabenstellung VERBUND als großer Wasserkraftwerkbetreiber hat sich zum Ziel gesetzt das mögliche Potential das in der Digitalisierung liegt zu nutzen. Aus diesem Grund heraus - hat die VERBUND Hydro Power (VHP) im Sinne der „Digitalisierung - Industrie 4.0“ 2017 zwei zukunftsweisende Innovationsprojekte gestartet. Eines beschäftigt sich überwiegend mit der Neugestaltung der internen Verwaltungsprozesse selbst. Das andere, das Projekt „Digitales Kraftwerk“, hat sich zur Aufgabe gemacht alle Technikprozesse hinsichtlich weiter Digita- lisierbarkeit kritisch zu untersuchen. Es sind neuartige innovative Technik-Tools und Ana- lyseansätze zu finden und für die einen optimierten Kraftwerksbetrieb nutzbar machen. Zu betrachten sind dabei neben der Technologie der Energieproduktion selbst insbesondere auch die dazu erforderliche Inspektions- und Instandhaltungsmaßnahmen. Als Muster- kraftwerk, an dem die neuartigen Technologien primär zu installieren, auszutesten und zu demonstrieren sind, wurde das etwa 30 km nördlich von Graz von der VHP an der Mur be- triebene 14 MW Flusskraftwerk Rabenstein gewählt. Mit der Vision der „automatischen Stauraumerfassung und -analyse“, unter Nutzung von automatischen Drohnen, Schiffen und Tauchrobotern als Triebfeder, wurde Ende 2017 schließlich ein konkretes Teilprojekt definiert. Hanke K. & Weinold T. (Hrsg.) (2019): 20. Internationale Geodätische Woche Obergurgl 2019. ©Herbert Wichmann Verlag. VDE VERLAG GmbH. Berlin/Offenbach. ISBN 978-3-87907-624-6
2 E. Heine und C. Stäuble
Dieses hat sich, fachlich extern unterstützt, in einem Zwei-Jahresprojekt zum Ziel gesetzt,
durch Nutzung neuerster innovativer Methoden und Messsystem die gesamten Sohlerfas-
sungs- und Unterwasserinspektionsprozesse bei den Kraftwerksanlagen und in den Stau-
räumen „so gut es geht“ automatisiert, eventuell sogar autonom, zu ermöglichen. Die Me-
thode, von Erfassung, über Auswertung, Datenhaltung bis hin zur Analyse – muss im Sinne
der digitalen Abwicklung zukunftsweisend sein.
2 Analyse der Anforderungen und Systemauswahl
Unmittelbar nachdem die VHP den Mitautor als fachliche und organisatorische Unterstüt-
zung von universitärer Seite gewinnen konnte, startete das Projekt im Jänner mit zwei Akti-
onen - mit einer Demovorführung des SONOBOT-Systems der Fa. Evologics beim Demo-
kraftwerk Rabenstein, sowie mit der Erstellung einer genaueren Anforderungsaufstellung.
Zweck der Anforderungsliste war, auf Basis der im Kraftwerksbetrieb anfallenden spezifi-
schen Fragestellungen, mit den sich bietenden neuen innovativen Lösungsmöglichkeiten,
rasch eine Empfehlung über die weitere Vorgangsweise abgeben zu können.
Hauptauslöser für die im Kraftwerksbetrieb anfallende Lotungsarbeiten:
Abflussuntersuchung/Hydraulische Untersuchungen
Ermittlung von Sedimentmengen und Eintiefungsverhalten
Speicherinhalts- bzw. Totraumbestimmungen
Aufnahme für Abrechnungszwecke (z.B. Baggerungen)
Energiewirtschaftliche Optimierung
Flussmorphologie/Ökologie (Organismenwanderhilfen)
Untiefen- und Mindesttiefenkontrolle (Baggerbedarfsanalyse und Erfolgskontrolle)
Geologische & Stabilitätskontrollen (Kolke, Sohldurchbrüche)
Funktionsnachweise und Zustandsbewertungen (Grundablässe, Pegel)
Bedarfsabschätzung für Tauchereinsätze
In einer Matrixtabelle wurden für die einzelnen Beweggründe der Sohlerfassungen bzw. In-
spektionen, unterschieden nach Erfassungsgebieten, Bewertungen vergeben. Klassifiziert
wurde etwa nach Häufigkeit der Messanforderung, einzuhaltende Genauigkeiten, Anforde-
rungen an die Punktdichte, wie schnell die Ergebnisse vorliegen müssen, ob nicht visuelle
Kontrollen vor Ort ausreichend sind, bzw. wieweit schon aktuell eine autonome Befahrung
möglich erscheint.
Auf Basis dieser Liste und „best practice“ Beispielen in diesem Bereich (SHEN et al. 2018),
wurde schließlich beschlossen in 3 Richtungen die Sohlerfassung methodisch zu erneuern.
Mit einem unbemannten Boot (USV) sollen die absehbaren Möglichkeiten der Auto-
matisierung auch für die flächenhaften Aufnahmen nutzbar gemacht werden.
Ein Echtzeit-3D-Inspektionssystem soll rasche Funktionskontrollen und Begut-
achtungen erlauben.
Mit einem hochmobilen und doch ausreichend genauen modernen Multibeam-System
mit 180° Vertikalabdeckung ist zukünftig auch an kleinen Gewässern eine flächenhafte
Sohlerfassung möglich.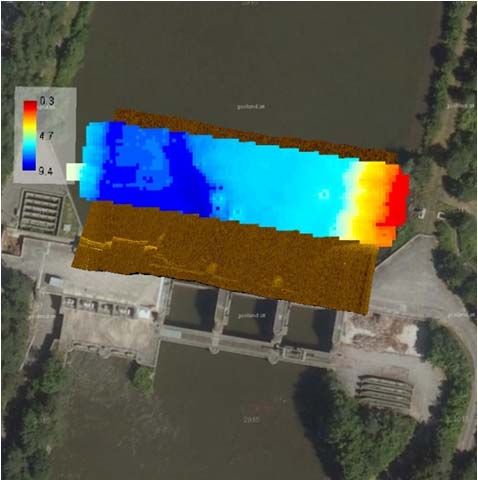
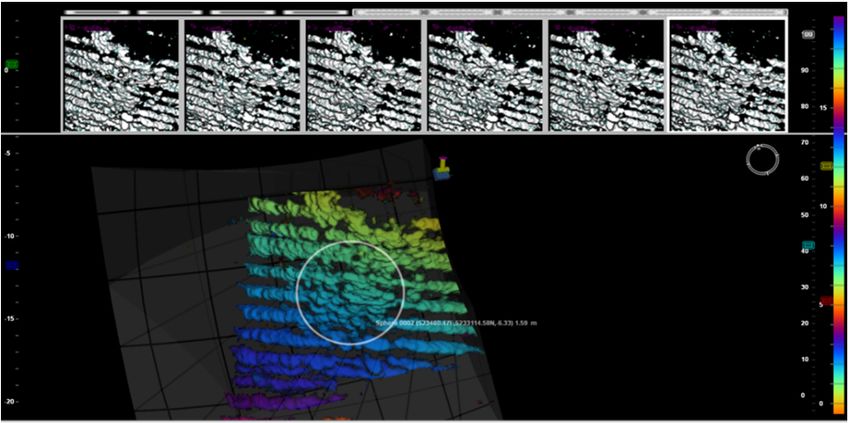
Akustische 3D-Unterwasserinspektion bei Kraftwerksanlagen 3 Nach etwa einem Jahr – also in etwa zur Mitte des Projekts - wird nun in weiterer Folge auf einige bereits vorliegenden interessanten Ergebnisse und Erkenntnisse näher eingegangen. Weitere Tests und die konkrete Umsetzung der Maßnahmen werden bis etwa 2020 dauern. 3 Unbemannte autonome Messboote 3.1 Sonobot Am 15.1.2018, unmittelbar nach Projektstart, wurde am Kraftwerk Rabenstein eine impuls- gebende Demovorführung organisiert (vgl. Abb. 1). Bei dem getesteten SONOBOT handelt es sich um ein in Form eines Katamarans ausgeführtes, etwa 1.5 m langes vorprogrammiert fahrendes kostengünstiges ASV (Autonomous Surface Vehicle) der Firma EvoLogics. Das kleine Messboot ist durch die Integration eines kompakten, preislich günstigen Multibeam- Echolotungssystems (MBES) für - dem Messsystem entsprechende - einfache Sohlgrund- aufnahmen einsetzbar (vgl. Abb. 2). Mit dem Test konnten insbesondere die ursprünglichen Projektinitiatoren erste praktische Eindrücke von der Thematik der Sohlgrunderfassung in unmittelbarer Nähe der laufenden Kraftwerksanlagen, gewinnen. Zum einen von den faszi- nierenden neuen Automatisierungsmöglichkeiten, andererseits aber auch von den noch existierenden Einschränkungen, die die autonom fahrenden Messschiffen samt Messaus- rüstung heut noch haben. Abb. 1: ASV-Sonobot am Kraftwerk Abb. 2: Seitensichtsonar-Ansicht überlagert Rabenstein an der Mur mit bathymetrischen Messdaten des Sonobot Bei den weiterführenden Recherchen nach, für den Kraftwerksbetrieb tauglichen, autono- men Messbooten hat sich gezeigt, dass das Angebot für Europa, speziell unter dem Ge- sichtspunkt eines gesicherten raschen Service, noch sehr beschränkt ist. Da für einen gesi- cherten und raschen Einsatz das Zusammenspiel zwischen dem ASV/USV und den darauf installierten Bathymetriesystemen entscheidend für den Messerfolg ist, wurde beschlossen, die Suche vorwiegend über die Hersteller entsprechender Bathymetriesysteme fortzusetzen.

4 E. Heine und C. Stäuble 3.2 Echoboat – Apache 5 – OTTER Im Herbst 2018 wurden dann diesbezüglich erste Testmessungen mit der Firma Nautilus (R2Sonic Echolotsysteme) mit dem von Ihnen adaptierten USV „Echoboat“ des Herstellers Seafloorsystems begonnen, welche nun im Dezember 2018 in Hinblick auf einen stabilen Datenfluss zwischen Fernsteuereinheit und Bootrechner sowie der Einbindung des Fächer- echolotes R2Sonic 2020 ausgeweitet werden. Direkt anschließend erfolgen Tests mit den beiden USVs „Apache 5“ des Herstellers CHCNav sowie „Otter“ von Maritime Robotics, welche beide für den Einsatz des Fächerecholotes Subsea iWBMS des Herstellers NORBIT konfiguriert sind. 4 Echtzeit-3D-Sonar „Echoscope Surface“ 4.1 Technologie Für die Inspektion von Unterwasser-Bauwerksanlagen haben die heutzutage als Industrie- standard-Technologie eingesetzten Multibeam-Echolotsystem die Einschränkungen, dass einerseits die aufgenommenen Daten erst einen Nachbearbeitungsprozess unterzogen wer- den müssen, um brauchbare 3D-Bilder des inspizierten Bereiches zu erhalten. Zudem können bewegte Objekte nicht abgebildet werden. Das Echtzeit-3D-Sonar Echoscope Surface von Coda Octopus (Edinburgh, UK) ermöglicht es dem Benutzer, ein Echtzeit-3D-Bild der Unterwasserumgebung zu erstellen, unabhängig davon, ob die Sichtbedingungen niedrig oder null sind. Bis zu 20-mal pro Sekunde wird ein großer volumetrischer Puls mit Schallenergie ausge- sendet und empfangen. Dieser volumetrische Impuls, der typischerweise einen Bereich von 50°x50° (bei einer Messfrequenz von 315 kHz beschallt, wird anschließend durch das Em- pfangsarray von (128x128 Zellen) detektiert und in über 16.000 Sondierungen für jeden Ping segmentiert. Diese außergewöhnlich hohe Datendichte ermöglicht eine effiziente automatische Filterung (Bereinigung von Rauschen) der empfangenen Signale, und ermöglicht es der Bediener- Software USE, sofort ein von Signalrauschen befreites 3D-Darstellung auf dem PC oder Laptop zu rendern. Zusätzlich zur Echtzeit-3D-Visualisierung von statischen Objekten erzeugt der volumetri- sche Puls ein großes Sichtfeld (FoV), welches jedes sich bewegende Objekt innerhalb des FoV ständig sichtbar macht. Eine motorbetrieben 2-Achs-Rotations- und Neigungseinheit ermöglicht eine über die USE-Software steuerbare, dynamische Ausrichtung des Schallkopfes. Somit können ausge- hend von einem Standpunkt größerer Bauwerkseinheiten stufenlos mit höherer Auflösung aufgenommen werden. Die F185+ GNSS-IMU-Einheit liefert Positions- und Bewegungsdaten und ermöglicht durch sein Doppelantennen-GNSS-System eine laufende Bestimmung der Ausrichtung des Messsystems. Damit kann die USE-Software aus den bis zu 20mal in der Sekunde erstellten Punktwolken laufend das georeferenzierte 3D-Modell erweitern. Bei Aufnahmen mit einer

Akustische 3D-Unterwasserinspektion bei Kraftwerksanlagen 5 dynamischen Messplattform (Messboot, Unterwasser-ROV, Kran, o.ä,) ergeben sich einer- seits die Möglichkeit der Dokumentation großer Anlagenteile, andererseits, durch den gro- ßen Öffnungswinkel des Systems, viele unterschiedlichste Blickwinkel auf das Objekt, so- dass auch Bereiche, die z.B. bei MBES-Messungen nicht einsehbar sind, erfasst werden können. 4.2 Testmessung Kraftwerk Rabenstein/Mur – Messplattform Kran Im Rahmen der Testmessungen im Stauraum des Kraftwerkes Rabenstein an der Mur wur- den die Bereich des Turbineneinlässe und der anschließenden Wehrfelder inspiziert. Als Messgeräteträger wurde hier ein Kran eingesetzt. Der Vorteil ist, dass Kräne bei vielen Kraftwerksanlagen als Teil der Staumauerinfrastruktur (wie Rechenreinigungsanlage oder Portalkran) oder über den betriebseigenen LKW mit entsprechendem Kranaufbau vorhan- den sind. Diese können auch im Hochwasserfall, wenn ein Befahren des Stauraums wegen der geöffneten Wehrüberläufe nicht mehr möglich ist, zum Einsatz kommen (vgl. Abb. 3). Gerade in dieser Situation, wenn Treibgüter in den Stauraum geschwemmt werden und den Turbineneinlass verlegen können, ist erstmals eine sichere und aussagekräftige Inspektion des Einlaufes und der Sohle unmittelbar vor dem Einlauf möglich. Abb. 3: Einsatz des Echtzeit-3D-Sonars am Kran des Abb. 4: Echoscope Surface mit Kraftwerkes Rabenstein Rotations- und Neigungseinheit Zu diesem Zweck wurde extra ein spezieller Sensorträger angefertigt, welcher am Mehr- schalengreifer des Kranes eingehängt und über die Greifbacken fixiert wird. Knapp unter- halb des Greifers ist exzentrisch von der Sensorstange auf einem horizontalen Ausleger von zwei Meter Länge die F185+ GNSS-IMU-Einheit mit den beiden richtungsgebenden GNSS-Antennen montiert. Abhängig von der Lage des Untersuchungsbereiches kann die vertikale Trägerstange mit Zwischenelementen, je nach der erforderlichen Eintauchtiefe des Sensors, verlängert werden. Am unteren Ende des vertikalen Trägerelementes ist die Echoscope Rotations- und Neigungseinheit mit der eingebauten Transducer-Einheit an- geschraubt (vgl. Abb. 4). Die Bedienung des Echoscope-Sonarmoduls, des GNSS-IMU-Systems, sowie der Rota- tions-Neigungseinheit erfolgt zentral über die USE-Software auf einem leistungsstarken Notebook, welches im Fall der Testmessung im Kranführerstand Platz fand. Die Messungen der Turbineneinlassbereiche (Metallstabgitter = „Rechen“) sowie der Wehrfelder (max. Wassertiefe etwa 10m) wurden in mehreren Durchgängen mit unter-
6 E. Heine und C. Stäuble
schiedlichen Bewegungsmustern und Methoden durchgeführt. Damit konnten die für die
jeweilige Aufgabenstellung geeigneten Messverfahren und die dabei erzielbare Daten-
qualität ermittelt werden.
Statische Aufnahmeposition:
Die Sensor-Einheit wird mittels Messplattform auf eine fixe Position
gebracht und verharrt an der derselben Aufnahmeposition
Dynamische Aufnahmen:
Die Sensoreinheit wird entlang eines Weges bewegt (z.B.: Kranfahrt parallel
zur Mauerkrone entlang der Wehrfelder).
Mittels der Rotations- und Neigungseinheit kann die Sensoreinheit kontinuier-
lich horizontal gedreht und vertikal geschwenkt werden
Unterschiedliche Eintauchtiefen liefern veränderte Aufnahmewinkel
Unterschiedliche Fahrtgeschwindigkeiten
Unterschiedliche Strömungsgeschwindigkeiten im Einlassgitterbereich (Turbine
eingeschaltet oder abgeschaltet) bewirken veränderte Verwirbelungen im Bereich
der Gitterstäbe
Die unter Einbeziehung der für den Inspektionsbetrieb zuständigen Personen in die Echt-
zeit-Interpretation der Messergebnisse haben gezeigt, dass:
der Kran eine ideale Messplattform für diese Inspektionsaufgabe darstellt
die Wehrfeldelemente im dynamischen Messmodus lückenlos und detailliert er-
fasst werden können,
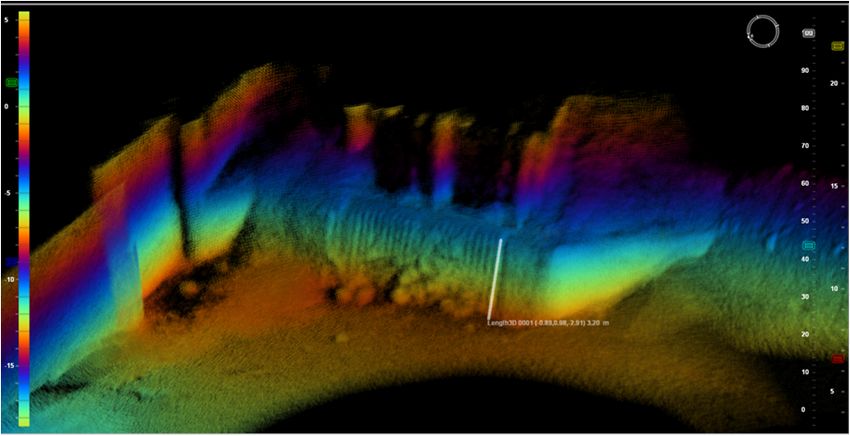
bereits geringe Verschmutzungen der Rechenelemente des Turbineneinlasses trotz
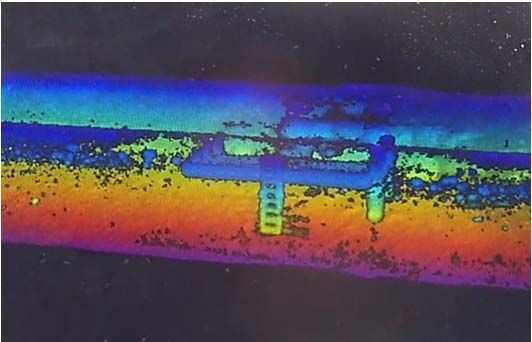
vollem Kraftwerksbetrieb visuell erkannt werden (vgl. Abb. 5)
eine Aussage über die einzelnen Gitterelemente (Stabstärke und Abstände) jedoch
nicht eindeutig getroffen werden kann; auch nicht bei abgeschalteter Turbine.
Abb. 5: Echtzeit-3D-Modell des Turbineneinlassbereiches; teilweise verlegt durch Treibgut
Akustische 3D-Unterwasserinspektion bei Kraftwerksanlagen 7 4.3 Testmessung Tieber See – Messplattformen Boot und ROV Da zum Zeitpunkt der anberaumten Testmessungen die Mur Hochwasser führte und die Wehrfelder des Kraftwerkes Rabenstein überströmt waren, war ein Befahren des Stauraum- bereiches mit einem Messboot nicht möglich. Aus diesem Grund wurde kurzerhand das Testgebiet auf den in der Nähe liegenden Tieber See verlagert. Echoscope-Einsatz auf Messzille Der Umbau der Echoscope-Messeinheit vom Kran auf das Messboot Roman konnte auf- grund des modularen Sensorträgersystems (idente Trägerelemente und Anschlüsse an Boot und Kran) in sehr kurzer Zeit durchgeführt werden, und bewies somit den hohen Mobili- tätsgrad dieses Messsystems. Bei den Messfahrten in diesem extrem flachen Schotterteich, von dem keinerlei Informati- onen über die Tiefensituation oder etwaiger Untiefen (Steinblöcke, etc.) vorlagen, zeigte sich der Vorteil des großen Gesichtsfeldes und des großen Datenvolumens dieses Sensors. Durch die im Echtzeit-3D-Modell enthaltene Darstellung der vorausliegenden Unterwasser- situation konnten die Messfahrten zur Erfassung der Uferbefestigung und der ufernahen Bauten jeweils in optimalem Messabstand zu den Vermessungsobjekten sicher durch- geführt werden (vgl. Abb. 6). Echoscope-Einsatz auf Tauchroboter (ROV) Eine weitere Teststellung betraf den Einsatz des Echoscopes auf dem Verbund-eigenen neuen Tauchroboter RB mini 600 der Firma Rovbuilder. Die Echoscope-Transducereinheit wurde dabei seitlich auf diesem kabelgeführten Unterwasserfahrzeug montiert. Mit zu- sätzlich angebrachten Auftriebskörpern wurde das ROV austariert (vgl. Abb. 7). Die durchgeführten Tauchfahrten zeigten, dass das Echtzeit-3D-Sonar grundsätzlich auf diesem Mini-Rov eingesetzt werden kann. Abb. 6: 3D-Echtzeitvisualisierung einer ufernahen Abb. 7: ROV RB600 als Messplatt- Badeleiter form für das Echoscope Surface Jedoch bringen Gewicht und der Strömungswiderstand des Echoscopes den ROV RB mini 600 an die Leistungsgrenze seiner Antriebseinheit, sodass ein derartiger Einsatz nur in ab- solut ruhenden Gewässern möglich ist. Zudem beschränkt die geringe zulässige Tauchtiefe des Echoscope Surface von 20 Metern derartige, an der Leistungsgrenze angesiedelte Ein- sätze. Bereits der Ausfall einer oder mehrerer Antriebseinheiten des ROV bei einem Tauch-

8 E. Heine und C. Stäuble einsatz in z.B. 15 m Wassertiefe könnte diesen aufgrund der asymmetrischen Ge- wichtsverteilung der Messplattform in Manövrierschwierigkeiten bringen und unter die zu- lässige Wassertiefe des Echoscope-Sonars (20 m) sinken lassen. 4.4 Testmessung Sperre Langmann – Messplattform Boot Die konkrete Fragestellung nach dem Grad der Verlandung des Einlasses zum Druckstollen des Kraftwerks Arnstein unmittelbar an der Talsperre Langmann (Packalpe/Koralpe) führte zur Durchführung der Echoscope-Testmessung an dieser Anlage. Als Messplattform diente hier wiederum die schon am Tieber See eingesetzte Messzille Ro- man. Im Gegensatz zu den Messungen am See benötigte die F185+ GNSS-IMU-Einheit diesmal mehr als 20 Minuten für den Initialisierungsprozess im hinteren, offeneren Stau- raumbereich (kinematisches Alignment), was u.a. ein Hinweis auf eine starke GNSS-Sig- nalabschattung in dem engen Talraum ist (Längauer 2010). Dieses Verhalten sowie der Verlust des GNSS-RTK-Fixes konnte auch im späteren Messbetrieb direkt vor der Stau- mauer immer wieder beobachtet werden. Die zeitraubenden Unterbrechungen zeigten die beschränkte Tauglichkeit dieser GNSS-IMU-Einheit für Einsätze mit GNSS-Abschattungs- problemen. Aufgrund der kaum oder nur sehr kurz verfügbaren hochgenauen GNSS-Positionen wurde bei der Echoscope-Messung die Modellbildung primär auf Basis der IMU-Daten und Ver- knüpfungspunkten durchgeführt. Die erzielten Ergebnisse zeigen deutlich die stark fort- geschrittene Verlandung des unteren Bereiches des Einlaufgitters (vgl. Abb. 8). Abb. 8: Sperre Langmann - Verlandung des Einlaufgitters zum Druckstollen 4.5 Erkenntnisse für die Systemanschaffung Ungeachtet der beeindruckenden Ergebnisse des Echoscope Surface mit der Standardfre- quenz 315 kHz hat es sich beim Test jedoch gezeigt, dass besonders für die Inspektion der engmaschigen Einlassgitter, aber auch von stark strukturieren Betonbauwerksteilen, eine höhere Auflösung wünschenswert wäre. Diese höhere Auflösung ermöglicht, insbesondere
Akustische 3D-Unterwasserinspektion bei Kraftwerksanlagen 9
beim Bootseinsätzen, zusätzlich noch die Einhaltung eines größeren (Sicherheits-) Abstan-
des bei der Untersuchung im Turbineneinlassbereich oder im Bereich der Staumauerkrone.
Aus den oben genannten Gründen fiel, nach Abwägung aller Aspekte, insbesondere auch
der Kosten, die Entscheidung für den Ankauf eines Zweifrequenz-Instruments Echosco-
pe4G Surface (315/630 kHz; Öffnungswinkel 50˚x50˚ bzw. 24˚x24˚). Eine weitere Verbes-
serung sollte sich durch den Ersatz der F185+ GNSS-IMU-Einheit durch eine tightly
coupled GNSS/INS-Einheit ergeben.
Diese Kombination aus Frequenzen und Öffnungswinkeln verleiht dem Echoscope4G
Surface die gewünschten Funktionen für den Einsatz in einer Vielzahl der betrieblichen
Operationen und Aufgaben.
5 Multibeam-Systeme (MBES)
5.1 R2Sonic - Sonic 2020 / Sonic 2024
Anfang Oktober 2018 demonstrierte die Firma Nautilus zwei Systeme des Multibeam Her-
stellers R2Sonic (vgl. Tab.1).
Tabelle 1: technische Daten der Fächerecholote von R2Sonic
MBES max. Tiefe Scanweite Strahlenbreiten
@200 kHz @400 KHz @700 kHz
Sonic 2022 400 m 10-160° 2°x2° 1°x1° 0.6°x0.6°
Sonic 2020 75 m 10-130° 4°x4° 2°x2°
Für die VHP speziell von Interesse war der Test als „Doppelschwingersystem“ bei dem
erstmals zwei unterschiedliche Schwinger kombiniert wurden. Das high-end Sonic 2022
und das durch seine Kompaktheit speziell für ASVs interessante Sonic 2020, welches trotz
der geringen Baugröße eine für die hier vorgesehene Flachwasservermessung ausgezeich-
nete Performance aufweist (vgl. Abb. 9). Mit dieser in der Praxis noch nie getesteten Gerä-
tekombination konnten erfolgreich zwei typische im Kraftwerksbetrieb anfallende Muster-
aufgaben durchgeführt werden. Die Aufnahme der Einlaufbereiches des Kraftwerks Raben-
stein bei vollem Betrieb, sowie das Inspizieren der Auslassöffnung der Eigenbedarfsma-
schine des Kraftwerkes Ybbs-Persenbeug an der Donau (vgl. Abb. 10 & 11). Die Kombi-
nation als „Doppelschwinger“ ist interessant, weil damit 3 wesentliche Überlegungen erfüllt
wären:
• Als bootsgestütztes „Doppelschwingersystem“ mit 180° Vertikalabdeckung.
• Die autonome Verwendbarkeit des Sonic 2020 in einem ASV.
• Das Sonic 2022 könnte in der Folge das von VHP speziell bei hohen Genauigkeitsan-
forderungen eingesetzte 11 Jahre alte Multibeam-System Kongsberg EM 3002 ersetzen.
10 E. Heine und C. Stäuble
Abb. 9:
Dualschwingerkombination mit Sonic 2022 und
Sonic 2020
Abb. 10: Messboot Roman in der Abb. 11: R2Sonic MBES-Messung mit kombinier-
Schleuse Ybbs-Persenbeug tem Schwingersystem anlässlich der Durchfahrt
5.2 Kongsberg – EM 3002
Nicht direkt für das Digitalisierungsprojekt gedacht, aber möglicherweise den weiteren
MBES-Auswahlprozess stark beeinflussend, sind die Erfahrungen und etlicher 2018 durch-
geführte Tests mit dem mittlerweile schon seit 10 Jahren, üblicherweise am 10m-Mess-
schiff Michael, an der Donau eingesetzten VHP-eigenen MBES System EM 3002 (vgl.
Tab.2).
Tabelle 2: Technische Daten des Fächerecholots von Kongsberg
MBES max. Tiefe max. Strahlenbreiten
Scanweite @300 kHz
EM 3002 ~300 m 130° 1.5°x1.5°
Das ursprünglich vorwiegend für flächenhafte Aufnahmen direkt bei den Kraftwerks- und
in den Schleusenbereichen der Donaukraftwerke eingesetzte Einschwingersystem wird seit
drei Jahren auch für das Monitoring der „Geschiebezugabe KW Freundenau“ an der Donau
bei Wien eingesetzt. Schon seit 20 Jahren ist ein direkt unterhalb des Kraftwerkes gelegener
etwa 10 km langer Abschnitt der Donau jährlich betreffend der Sohleintiefungstendenz,
welche leider trotz der Schotterzugabe noch vorliegt, so exakt als möglich zu messen. Diese
Strecke ist mit hoher Wahrscheinlichkeit mittlerweile einer der am häufigsten und hinsicht-
lich der systematischen Fehler am exaktesten eingemessene Sohlabschnitte weltweit. Ur-
sprünglich mit Singlebeam-Systemen (SBES) in 100m Profilen gemessen lag die Bestim-
mungsgenauigkeit der bestimmten mittleren Sohleintiefung bei etwa 2 cm. Als Höhen-Akustische 3D-Unterwasserinspektion bei Kraftwerksanlagen 11
referenz dienten die von ViaDonau uferseitig stabilisierten und betreuten Hektometer und
Donau-Trigsteine.
Anlässlich der Neuregelung der Schotterzugabe - weg von der jährlichen Bemessung der
Zugabemenge auf Basis des im Vorjahr ermittelten mittleren Eintiefungsverhaltens hin zu
längerfristigen Zeiträumen - wird nun auch das Monitoring umgestellt. Zukünftig soll die
Sohlerfassung flächenhaft, auf Basis von MBES-Systemen erfolgen. Gleichzeitig werden
die Höhen über Adria nur noch direkt aus RTK-GNSS abgeleitet. Ziel der jetzigen Um-
stellung auf die flächenhafte Erfassung mit MBES-Systemen ist es - unter besonderer Be-
rücksichtigung des höheren Fehlerpotentials im Einzelprofilvergleich von MBES im Ver-
gleich zu SBES - zukünftig eine methodisch gut abgesicherte, praktisch fast gleich genaue
Aussage über das mittlere Eintiefungsverhalten zu erhalten.
Neben der methodischen Festlegung und den Abstimmungen zwischen der VHP und der an
der Donau quasi als Kontrollinstanz arbeitenden ViaDonau waren etliche, letztlich sehr
lehrreiche Testmessungen durchzuführen. Wesentliche Erkenntnisse daraus sind:
Es gibt nur wenige Untersuchungen über die real erreichbaren Genauigkeiten der
MBES-Geräte für derartige Aufgabenstellungen. Insbesondere nicht für Genauig-
keitsansprüche von unter 7 cm.
Bei einem Einsatz von Vermessungs-MBES (in diesem Fall: EM 3002 und EM
2040 von Kongsberg), von high-end Inertialsystemen (INS) gestützten GNNS-
RTK Geräten, von eigenen RTK-Referenzstationen im Nahbereich des arbeiten-
den Messbootes, sowie bei peniblem Einhalten von Verfahrens- und Kontroll-
methoden, kann man - in betreffend Temperatur konstanten und nicht tempera-
turgeschichteten Binnengewässern – für Bereiche mit Tiefen bis etwa 5 Metern,
eine Aussage über eine mittlere Sohltiefenänderung in der Größenordnung von
etwa 3-4 cm machen.
Jeglicher Komponentenaustausch sowie Änderungen vor allem der Sende-, Em-
pfangs- und Filterparameter, und sogar der Systemsoftware, insbesondere natür-
lich der Messfrequenz können eine Vergleichbarkeit unmöglich machen!
Das 10 Jahre alte VHP eigene Kongsberg EM 3002 zeigt gegenüber Geräten der
neuesten Generation (etwa EM 2040) ein etwa doppelt so hohes Rauschverhal-
ten., bei etwa annähernd gleicher Stabilität (hinsichtlich systematischer Fehler).
Anfängliche Offsetunterschiede (nur diese wurden letztlich betrachtet) zwischen
den von VHP- und Via-Donau eingesetzten hochpreisigen und schweren MBES
und SBES Geräten konnten letztlich auf etwa unter 2cm gedrückt werden.
Für Einzel-Höhenkotenbetrachtungen auf größeren horizontalen Flächen ist unter
Betrachtung der Fehlerbilanz, ein cm-genaues SBES nach wie vor eine mögliche
Alternative.
Für die Durchführung der behördlich vorgeschrieben Auflagen für die VHP, insbesondere
an der Donau ist somit sicherzustellen, dass ein derartiges hinsichtlich systematischen Feh-
lerverhaltens gut geprüftes Gerät weiterhin vorhanden ist.12 E. Heine und C. Stäuble 6 Erkenntnisse und Ausblick Die Suche nach einen wirklich einsetzbaren geeignet ASV/USV gestaltet sich schwieriger als erwartet. Die Such wird aktuell intensiv fortgesetzt. Mit der Auswahl und letztlich dem Kauf des Echtzeit-3D-Sonar „Echoscope Surface“ liegt eine ideale metrisch verwendbare akustisch arbeitende Inspektionseinrichtung vor, welche auch bei widrigen Messbedingungen arbeitet und Instant Begutachtungen möglich macht. Die Suche auf der idealen mobilen und noch vernünftig exakten Multibeam Echolotungsge- rätschaft, mit Einsetzbarkeit auf autonom fahrenden Messbooten wird intensiv fortgesetzt. Bis dato gilt in der Bathymetrie leider immer noch - “What you pay is what you get”. Literatur SHEN, J., FORSYTH, R. & KILGORE R. (2018): Underwater Inspection of Bridge Sub- structures Using Imaging Technology. LÄNGAUER, K. (2010): Trajektorienbestimmung mittels Integration von GNSS und IMS. Masterarbeit an der Technischen Universität Graz.
Sie können auch lesen