Hardwareaspekte in Geo-Informationssystemen - Prof. Dr.-Ing. Ralf Bill Agrar- und Umweltwissenschaftliche Fakultät Professur für Geodäsie und ...
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Hardwareaspekte in
Geo-Informationssystemen
Prof. Dr.-Ing. Ralf Bill
Agrar- und Umweltwissenschaftliche Fakultät
Professur für Geodäsie und Geoinformatik
Universität Rostock
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik
Anliegen Kennenlernen ausgewählter wichtiger Hardware (Geräte) im Kontext der Geo- Informationssysteme Aufzeigen von charakteristischen Kennzahlen dieser Hardware Aktuelle Trends bei Hardwareaspekten GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 2
Themen
Hardware
zur Datenerfassung (E)
zur Datenverarbeitung: Datenverwaltung (V) und –analyse (A)
zur Datenpräsentation (P)
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 3
Hardware GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 4
Hardware
Hardware subsumiert alle physischen Bestandteile einer Datenverarbeitungsanlage, also die
Geräte. Hardware wird erst gemeinsam mit der Software zur funktionsfähigen Einheit.
Neben dem eigentlichen Rechner zählen zur Hardware auch die zahlreichen Peripheriegeräte,
die in der Geoinformatik noch über das hinausgehen, was von der Informatikseite unter
Hardware verstanden wird.
Digitalisier- Analytischer Scanner/ Vermessungs-
GIS-spezifische Peripherie tisch Plotter Bildsensoren geräte
Bussystem
Rechner
Bildschirm
Tastatur
Maus
Bussystem
Festplatte DVD/CD Drucker Plotter
Standard-Rechnerperipherie
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 5
Hardware zur Erfassung raumbezogener Daten GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 6

Hardware zur Erfassung
raumbezogener Daten
Vermessung
Tachymetrie
Global Navigation Satellite System
Multisensorsysteme
Laserscanner
Satellitenfernerkundungssensoren
Luftbild- und UAV-Photogrammetrie
Digitalisiertisch
Scanner
Sachdatenerfassung
Belegleser
Feldcomputer
Andere
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 7
Digitalisiertisch
Wandlung existierender Karten und Pläne Bildschirm
manuell von der analogen in die digitale
Form als Vektordaten Karte
Aufnahmemodi Tastatur
Digitalisier-
Einzelpunkt- oder Inkrementalmodus
menu
Auflösung:
1000 Linien/Inch (0.0254mm) Maus
Erfassungsgenauigkeit: Rechner
etwa 0,15 – 0,25mm
Ergebnis
Vektordaten
Preis
0.1T€ - 5T€
Trends
Abnehmende Bedeutung
Alternative: Heads-up-digitizing gescannter
Vorlagen am Bildschirm
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 8
Scanner
Digitales Sekundäraufzeichnungssystem, Flachbettscanner
mit dem Belege, Zeichnungen oder Bilder
abgetastet und analoge Vorlagen in Abtasteinheit Abtastvorlage
(Karte)
digitale Daten gewandelt werden. X Flachbett
Bauart
Trommel-, Flachbett-, Durchlaufscanner
Aufnahmemodus = Abtastung
Binär (1Bit/Pixel), Grauwerte (8Bit/Pixel), Y
Farbe (3*8Bit/Pixel)
Scankopf
Abtastprinzip
Punkt- und Zeilenabtastung
Auflösung
besser als 0.01mm (gemessen in dpi-
dots per inch)
400dpi = 0.064mm Pixel
400dpi = 24400 Pixel/mm
400dpi = 10 Linienpaare/mm ACER's ScanPremio 1220ST
Quelle: www.geoinformatik.uni-rostock.de – Geoinformatik-Lexikon http://www.scanneroutlet.com/
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 9
Scanner
Datenmengen: Trommelscanner
Katasterkarte (70*90cm, einfarbig,
AbtastwalzeAbtastkopf
10LP/mm) ~ 31.5MByte (rotierend)
Detektor
Topograph. Karte (48*70cm,
mehrfarbig, 20LP/mm) ~ 67.5MByte X
Laser
Farbiges Luftbild (23*23cm, 40LP/mm)
~ 127MByte
Y
Vorlagen
Abtastvor-
Texte, Bilder, Zeichnungen lage (Karte)
Rotierende
Trommel
Ergebnis
Rasterdaten
Anwendungen
DTP, Texterkennung
CAD, Kartographie, Bildverarbeitung
Trends
Zunehmende Bedeutung in der digitalen
Gesellschaft
Quelle: www.geoinformatik.uni-rostock.de – Geoinformatik-Lexikon
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 10Tachymeter
kombinierte Lage- und Höhenmessung
(3D) mittels Theodolit zur Winkelmessung
und elektronischem Distanzmesser zur
Streckenmessung Projekt: Rostock - [Digitale Karte]
Aufnahmemodi
Einzelpunktaufnahme
N X Y P
212 132.45 243.01 KD
213 138.97 231.33 Sch
34.4 Whs. 9
Genauigkeitsstufen Sch
Winkelmessgenauigkeit(0,1 bis 3 mgon)
Streckenmessgenauigkeit (0,5 mm + 1
ppm bis zu 5 mm + 3 ppm)
Ergebnis
Objektkodierte 3D-Vektordaten
Preis
5T€ - 15T€
Trends
Motorisierung
Integration einer Kamera Leica Total Station MS50
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 11Terrestrisches
Laserscanning (TLS)
dreidimensionale, schnelle und direkte Kamera-Scanner
Erfassung von Objektoberflächen in
hoher räumlicher Auflösung
Bauarten Hybrid-Scanner
Kamera-Scanner
Panorama-Scanner
Hybrid-Scanner
Streckenmessung
Impuls-Laufzeitmessung Panorama-Scanner
Phasendifferenzmessung
Triangulationsverfahren
Messung
~ 1 Million Punkte/Sekunde
Ergebnis
3D-Punktwolke + evtl. Intensität des
reflektierten Signals
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 12Terrestrisches
Laserscanning (TLS)
Anbieter
Leica (HDS-Produktfamilie und
ScanStation-Serie)
FARO Technologies (Photon und
Focus)
Cyra Technologies
MDL Laser Systems (Quarryman)
Riegl (LMS und VZ) Leica P15 Faro Laserscanner LS
Topcon
Trimble Navigation
Zoller & Fröhlich (Z+F Profiler und
Imager)
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 13Global Navigation Satellite
System (GNSS)
Satellitenbasierte 3D- Mehrere weltweite Systeme
Punktbestimmung Global Positioning System (GPS,
Mind. 4 Satelliten zur USA, eigentlich NAVigation Satellite
Punktbestimmung Timing And Ranging-Global
Passives System aus Nutzersicht Positioning System NAVSTAR-GPS)
Satelliten auf mehreren Bahnen im GLONASS (GLObal NAvigation
Orbit Satellite System, Russland)
Nutzer mit Empfänger auf der Erde GALILEO (Europa)
Verschiedene Messprinzipien Beidou/Compass (China)
Absolut- versus Differenziell
Code- versus Phasenmessung Raumsegment
Echtzeit versus Postprocessing
Ergebnis
Kontrollsegment
Objektkodierte 3D-Vektordaten Nutzersegment
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 14Global Navigation Satellite
System (GNSS)
Satellitengestützte SAPOS
Erweiterungssysteme
EGNOS, WAAS, MSAS, GAGA
Referenzdatenanbieter
ALF, VRSNow, Smart Net Europe, Axio-
Net, starfire, IGS-RTS, Omnistar,
SAPOS
Preis
~0,,1 T€ bis zu mehreren 1=T€
Empfänger
Garmin, Leica, Magellan, Sokkia,
Trimble u.v.a.
Trends
Real-time-kinematic
Vom low-cost- bis zum high-end-
Empfänger
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 15Global Navigation Satellite
System (GNSS)
Vielfältige GNSS-Empfänger unterschiedlicher Leistungsklassen
Leica GG03
GNSS-Steckkarte
GNSS-Maus
Leica Zeno 5
Leica Zeno 10 Leica MS50 plus GNSS
Leica GG03_CS25
TomTom Go30Traffic
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 16Multisensorsystem
Ein Multisensorsystem ist charakterisiert als kinematisches Messsystem, das eine
vollständige Kartierungslösung durch die Integration verschiedenster Sensoren
auf einer gemeinsamen zeitlich synchronisierten Plattform bietet.
Im Prinzip werden keine weitere externe Informationen, also auch keine
Passpunkte, benötigt. Derartige Informationen können aber in die Auswertung als
redundante Informationen miteinbezogen werden (nach K. P. Schwarz (1998b)).
Beispiele:
Multisensorkonzepte im Bildflugzeug
Klassischer Luftbildflug
Unmanned Aircraft Systems (UAV)
Multisensorkonzepte im Fahrzeug
- Mobiles Laserscanning (MLS)
- Mobile Mapping-Systeme (MMS)
Trends
An Bedeutung zunehmend
Hoher Automationsgrad
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 17Mobiler Mapping-Systeme
(MMS)
Fusion unterschiedlichster Sensoren, zumeist Leica Pegasus:Two
Laserscanner und Kameras, deren Position
und Orientierung durch integriertes DGNSS
und INS (Inertial Navigation System) bestimmt
werden.
Sind nur Laserscanner an Bord, so spricht
man von Mobiles Laserscanning (MLS).
Trägerplattformen
Autos, Quads, Schienenfahrzeuge, Schiffe,
Schneefahrzeuge, Fahrräder, Personen
Anbieter
Leica, Topcon (IP-S2), Eagle Eye
Technologies.
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 18Mobiler Mapping-Systeme
(MMS)
Komponenten Positionierungseinheit
GNSS = 3D-Position
Positionierungs-/ Integrations- Erfassungseinheit INS = 3D-Geschwindigkeiten
Navigationseinheit einheit bzw. 3D-Beschleunigungen
DGNSS Synchronisation CCD-Kamera Odometer resp. Radabgriff =
Panorama-
Geschwindigkeit und
INS Aufzeichnung
kamera Lauflänge in Fahrtrichtung
Odometer Speicherung Laserscanner Barometer =
Barometer 3G/GSM/
Höhenunterschied
Wi-Fi-Antennen Kompass und Inklinometer =
Kompass Azimute und Neigungen
Erfassungseinheit
CCD-Kameras = Bilddaten
Postprocessing mittels Kalmanfilter
Laserscanner = Punktwolken
Kartierung mittels Bildverarbeitung Farbvideokamera =
Verarbeitungseinheit Bildsequenzen
Sracheingabe = Texte
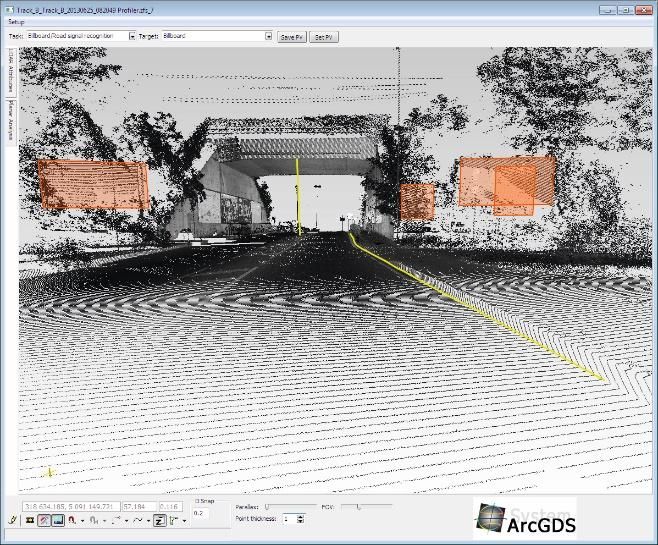
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 19Beispiele Mobile
Mapping Systeme
Gispro Based Mobile Mapping System LYNX Mobile Mapper
(MMS/MLS).
3 Laserscanner
6 digitale Videokameras
Radar (Detektion unterirdischer Kabel)
2 GNSS-Empfänger mit IMU (Inertial
Measurement Unit)
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 20Unmanned Aircaft System
(UAV)
UAV/UAS (engl. Unmanned Anbieter
Aerial/Aircraft/Airborne/Assisted Micodrones
Vehicles/Systems) oder RPAS
Aibotix
(engl. RemotelyPiloted Aircraft
Systems) Ascending Technologies
MD4-1000 Falcon 8
Gesamtsystem bestehend aus
fliegender Trägerplattform mit der
On-board-Sensorik, der Nutzlast
und der Bodenstation zur Führung
und Überwachung des Flugs
Einsatz im GIS-Kontext
Mikro- und Mini-UAV mit einer
Nutzlast kleiner als 5 kg
Ergebnis
3D-Punktwolken
Digitale Oberflächenmodelle
Digitale Orthophotos
Aibotix X6
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 21Unmanned Aircaft System
(UAV)
Trägerplattformen
Modellflugzeuge
Modellhelikopter
Multicopter (Quadro- mit vier,
Hexa- mit sechs und Octocopter
mit acht Rotoren) Multicopter Starrflügler
Flächenflügler
Ballons/Blimps
Transitions-Fluggeräte (TFG)
On-board-Sensorik zu Transitions-Fluggerät (TFG)
Positionierung und Orientierung
GNSS
INS
Kompass
Helicopter Blimp
Barometer
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 22Unmanned Aircaft System
(UAV)
Nutzlast = Erfassungssensorik
Still-Videokamera = Bildsequenz
Digitalkamera = Bild
Multispektralkamera, Spektrometer,
Hyperspektralsensoren =
Multispektrale Bilder
Laserscanner = 3D-Punktwolke
Bodenstation
Computer
Kommunikationskanal
Steuermodul
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 23Luftbildphotogrammetrie
- Reihenmesskammer
Unterscheidung
Analoge oder digitale
Reihenmesskammer
Analogkamera:
Messprinzip Leica RC 30
Multisensorsystem (GNSS, INS) zur
Positionierung und Orientierung der
Reihenmesskammer
Kamera zur Bilderfassung
Digitalkamera:
Ergebnis Leica ADS 100
Bilddaten
Orientierungsdaten
Anbieter
Digitalkamera:
Z/I Imaging
UltraCAM Eagle
Leica Geosystems
Integrated Geospatial Innovation (IGI)
Microsoft Ultracam Business
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 24Luftbildphotogrammetrie
- Multisensorsystem
Multisensorsystem
Kopplung verschiedener Sensoren DGPS INS
Messprinzip
GNSS, INS zur Positionierung und Laser Profiler
MSS
Luftbildkamera
Orientierung der Reihenmesskammer
Kamera = Bilddaten
Airborne Laserscanning = 3D-
Punktwolke Luftbild
Ergebnis
Bilddaten
Orientierungsdaten Testflug Hannover (Dornier)
3D-Punktwolke
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 25Luftbildphotogrammetrie
- Dreizeilenkamera
High Resolution Stereo Camera - Airborne Extended
Dreizeilenkamera-Prinzip der HRSC-Familie
Pushbroom-Scanner
GPS/INS Orientierung
5 Stereokanäle
4 multispektrale Kanäle
HRSC-AX: dlr.de
Quelle: DLR, 1998
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 26Hyperspektralsensor
System, das Bilder von sehr vielen, eng Beispiele:
beieinanderliegenden Wellenlängen AVIRIS (Airborne Visible InfraRed
aufzeichnet Imaging Spectrometer) mit 224
Plattform Spektralkanälen im sichtbaren und
infraroten Bereich
kopter-, flugzeug- oder satellitengestützt
HyMAP (Hyperspectral Mapper)
Messprinzip besitzt 128 Spektralkanäle im
für jeden Spektralkanal entsteht ein Bild sichtbaren und infraroten Bereich und
zwei Kanäle im thermalen Bereich
AISA (Airborne Imaging Spectrometer
Application)
HyMAP: gis.wiki.fau.de AISA Fenix: specim.fi/products/aisafenix/
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 27Airborne Laserscanning
(ALS)
Aktives Fernerkundungssystem Messmodus
LIDAR ( Light Detection and Ranging) Footprint, First-/Last Pulse resp.
Entfernung vom Flugkörper zum Boden Auflösung der Welle
wird mittels Laser gemessen Sensorpositionierung/-orientierung
einzelner Laserstrahl wird über mittels GNSS und INS
kippenden/rotierenden Spiegel zur Anbieter
Erdoberfläche abgelenkt Leica Geosystems (ALS80),
mehrere Laser zeilenartig angeordnet DragonEye, Trimble (AX60/AX80)
Messprinzip
Gepulstes System
Continuous Wave Laserscanning
viele Punkte pro m²
Ergebnis
3D-Punktwolke
Digitales Geländemodell (DGM)
Digitales Oberflächenmodell (DOM)
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 28Charakteristik aktueller
Luftbildsensoren
System Bodenauf- Empf. Spektrale Breite
lösung Maßstabs- Auflösung Aufnahmepfad
bereich (Bänder) = f(Flughöhe)
Schwarz-Weiß-Luftbilder 0,2 – 5 m ab 1 : 2000 1 ca. 2-5 km
Panchromatische Bilder
Colorinfrarot (CIR)-Luftbilder 0,2 – 5 m ab 1 : 2000 3 ca. 2 – 5 km
Near Infrared (NIR)-Luftbilder
Flugzeugscanner (multispektral, 0,1 – 0,4 m 1 : 2000 4 ca. 2 – 5 km
z. B. HRSC – AX)
Flugzeugscanner 5m 1 : 10.000 128 ca. 3 km, abh. von
(Hyperspektral, z. B. HyMap) Flughöhe (2500m)
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 29Photogrammetrische
Plotter/Auswertegeräte
Analog => Analytisch => Digital
Auswertung
Photogrammetrie
Ergebnis
Objektcodierte Vektordaten
Preis
Analytischer Plotter
bis zu einigen 100T€ LH Systems AM 2000
LH Systems SD 2000/3000
http://www.gis.leica-geosystems.com/
Digitaler Plotter
ZI Imaging - Image Station 2002
http://www.ziimaging.de
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 30Satellitensensoren
- Einteilung
Unterscheidung
Analog oder digital
Aktiv (Radar, Lidar, TIR)
Passiv (Optisch, NIR, Multispektral,
Hyperspektral)
Auflösung (räumlich, zeitlich, spektral)
Ergebnis
Bilddaten
Mehrkanalige Bilddaten
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 31Passive Satellitensensoren
- Optische Fernerkundung
Optisch-elektronische Scanner Optisch-mechanische Scanner
(CCD Linear Array Scanner, Push- (Whiskbroom-Scanner, Across-
broom Scanner) Track-Scanner)
SPOT-Familie Landsat-Familie
Rotierendes Prisma
Dx
Motor Flugrichtung
CCD-Sensor
T
Dy
f
Flugrichtung
Objektiv a
h y
h
Dy
x x
Panorama-
Verzerrung
Dx
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 32Aktive Satellitensensoren
- Mikrowellen-Fernerkundung
Radar (Radio Detection and Ranging)
Sensor besteht aus Sender und Flug-
Empfänger Antenne richtung
Sender schickt Mikrowellen aus Wellenfront
Empfänger zeichnet deren Rückstrahlung auf Sender und
Empfänger
Aktuelle Technologie
S
Synthetic Aperture Radar (SAR) Dy
t
SAR-Interferometrie (InSAR)
Beobachtete Fläche
Bildzeile
Verfügbare Systeme
ERS 1 (1991)
TanDEM-X: dlr.de
TerraSAR-X (2008)
TanDEM-X (2010)
TerraSAR-X: dlr.de
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 33Charakteristik aktueller
Satellitensensoren
System Boden- Empfohlener Maß- Spektrale Breite
auflösung stabsbereich Auflösung Aufnahmepfad
(Bänder)
IKONOS-PAN 1m 1 : 5000 1 11 km
SPOT-5 PAN 2,5 m 1 : 10.000 1 60 km
Quickbird-MS 2,8 m 1 : 10.000 4 16,5 km
IKONOS-MS 4m 1 : 10.000 4 11 km
IRS-IC/D-PAN 5m 1 : 10.000 1 70 km
IRS-P6 / Resourcesat-1 LISS-4 5,8 m 1 : 10.000 4 23 km
SPOT-4 PAN 10 m 1 : 25.000 1 60 km
SPOT-5 XS 10 m 1 : 25.000 4 60 km
Radarsat-1 10 – 100 m > 1 : 25.000 1 50 – 500 km
Terra-ASTER 15 / 30 m 1 : 35.000 14 60 km
SPOT-4 XS 20 m 1 : 50.000 3 60 km
IRS-1C/D LISS-3 23 m 1 : 50.000 4 141 km
ENVISAT-ASAR 25 m 1 : 50.000 1 120 km
Landsat-7ETM 30 m 1 : 75.000 7 185 km
ENVISAT-Meris 300 – 1200 m 1 : 750.000 15 1150 km
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 34Geosensornetze
Satellit
Geräte
Low-cost-Sensoren
Internet
Kamera Gateway
GNSS
INS
Senke
drahtlose Kommunikation
Datentyp Sensornetzwerk
Beobachtungen
Qualität
Sensorabhängig Computing unit
Trend
Zunehmende Bedeutung im Kontext der
Communica-
Digital Earth tion unit
Sensors
Battery
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 35Weitere Erfassungsgeräte Klartext-, Klarschriftbelegleser und Strichcodeleser zur Analog-Digital- Wandlung von Felderhebungen, Umfrageergebnisse und Codierungen RFID-Systeme (Radio Frequency Identication) zum Auslesen von Objektdaten und zur Verortung der Objekte z.B. in der Logistik Leitungsortungsgeräte oder Kanalvideosysteme zum Auffinden von Leitungsinfrastruktur oder zur Prüfung der Funktionsfähigkeit der Kanalrohre GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 36
Hardware zur Verarbeitung raumbezogener Daten GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 37
GIS-Arbeitsplätze
Preisklasse
Server
5000 €
Server
Arbeitsplatzrechner Personal-
1000 € Mobile/stationäre Computer
Clients
Laptop
Notebook
Mobile personen- Subnotebook
bezogene IuK- Tablet PC
Geräte Ultramobile PC
Netbook
PDA
Smartphone
Mobiltelefon
100 € Leistungsklasse
z.B. interner Speicherplatz
Wenige MB 1 GB > 10 GB Interner Speicherplatz
100 MHz 1 GHz > 2 GHz Taktrate
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 38Hardware zur Verarbeitung
raumbezogener Information
Desktop-GIS-Arbeitsplatz (Rechner, Tastatur, Maus und Tablett)
Netzwerk - Server - Client
Mobile Endgeräte
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 39Rechnerkomponenten
Zentraleinheit
Graphikadapter
Prozessoren
Arbeitsspeicher
Speichermanager
Ein-/Ausgänge
Speichererweiterung
Internes Bussystem/Schnittstellen Bildschirm/Tastatur/Maus
Externer Bus-Adapter
CD/DVD Drucker Festplatte Weitere Geräte
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 40Netzwerk:
Server - Client
Hardwareseitiger Zusammen-
Externes Netz
schluss mehrerer Rechner zu einem
(Internet)
Verbund, in dem sie sich in be- Festplatte
stimmten Funktionen (Software) un- Bildschirm
terstützen, ergänzen oder absichern
können. Dies gilt sowohl für Rech- Server CD/DVD-
Laufwerke
Plotter
nerauslastung, Ressourcenverwal-
Lokales Netzwerk
tung hinsichtlich der Peripheriege- Disk
räte, Programm- und Datenverbund Laserdrucker
(Intranet)
und Kommunikation in allen mög- Digitizer DTP-Scanner
lichen Kombinationen.
Netzausdehnung
Client A Client B
LAN (Local Area Network)
WLAN (Wireless Local Area
Network) Client D Client C
WAN (Wide Area Network)
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 41Client-Server-
Architektur
Server ist der Teil des Client-Server-Modells, welcher verantwortlich
ist, Dienste bereitzustellen. Der Server, auch back-end-Computer
genannt, ist ein Programm (ein Rechner), das (der) im Netz
besondere Leistungen übernimmt und diese Dienste ständig im
Hintergrund anbietet. Überträgt man dies auf Rechner, so dient der
Server als:
Massenspeicher (Dateienserver, DB-Server, Dokumentenserver).
Kommunikationsrechner (Mailserver, Webserver, Chatserver, Faxserver).
Ressourcenverwalter (Securityserver, Nameserver, Applikationsserver).
Peripheriegerätebereitsteller (Systemserver für Drucker, Plotter usw.).
Der Client nutzt diese Dienste. Er ist die Seite einer Client-Server-
Architektur, die den Anwender mit einem Mittel bzw. einer Methode
versorgt, mit der er auf Informationen und Anwendungen Zugriff
erhält, die auf einem Server liegen. Ein Web-Browser ist ein Beispiel
eines Client. Der Ausdruck wird manchmal verwendet für den
Computer des Nutzers, aber allgemein bezieht er sich auf ein
spezielles Programm, das mit dem Server über das Netzwerk
kommuniziert.
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 42Hardware zur Präsentation raumbezogener Daten GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 43
Hardware zur Präsentation
raumbezogener Daten
Backupmedien
Drucker
Plotter
CAVE
Head-mounted Displays
…
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 44Speicher- und Backupmedien
Unterscheidung nach Medien
Magnetplatten
CD-ROM/CD-R/CD-RW (650-900MB,Drucker
Oberbegriff für verschiedene Peripheriegeräte eines Computers
zur Ausgabe von Texten, Daten und Bildern auf Papier, bei
denen, im Gegensatz zum Plotter, nicht Linienzüge, sondern
einzelne Symbole oder Punkte dargestellt werden und ein
Druckbild ergeben.
Unterscheidung
Format DIN A4 oder DIN A3
Farbe oder Graustufen
Drucktechnik
Laserdrucker (> 300 dpi, Postscript oder HP Laserjet, Berichts-
und Graphikdrucker)
Thermo- oder Thermotransferdrucker (360 dpi, Farb-
Hardcopygeräte)
Zeilendrucker (Ergebnisausdrucke von Berechnungen, HP Color LaserJet Pro MFP
Programmentwicklung)
Nadel- oder Matrixdrucker (9,18,24-Nadeln, 240-360dpi)
Tintenstrahldrucker (200-300 dpi)
Quelle: www.geoinformatik.uni-rostock.de – Geoinformatik-Lexikon
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 46Plotter
Computergesteuerte Geräte zur exakten Ausgabe von
Zeichnungen und Bildern
Unterscheidung:
Format DIN A1, DIN A0 bzw. „endlos“
Stift-/Vektorplotter und Rasterplotter.
Vektorplotter (DIN A 3 - DIN A 0, < +- 0.1mm,
Karten mit Strichgraphiken, hochgenaue Ausgabe)
Rasterplotter oder elektrostatischer Plotter ((DIN A 3 - DIN A
0, +- 0.1mm, Rastergraphikausgabe)
Filmplotter ( +- 10 Mikrometer, > 2000 dpi)
Bildaufzeichnungsgeräte (25 - 200 Mikrometer Auflösung,
< 1*1m Ausgabeformat, für digitale Kartographie, digitale
Bildverarbeitung, Reproduktionstechnik)
Quelle: www.geoinformatik.uni-rostock.de – Geoinformatik-Lexikon
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 47Plotter
Vektorplotter
y
RotierendeZeichen-
Trommel werkzeug
x
Papier HP Designjet 500 A1
http://www.hardware-guide.de/
Rasterplotter/Elektrostatischer Plotter
Papierrolle Ebener Fertige
Papierweg Zeichnung
Durchlaufrichtung
Epson Stylus Pro 7600
http://www.hardware-
Zyan (C) Magenta (M) Gelb (Y) Schwarz (K) guide.de/
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 48Weitere Ausgabegeräte
Cave Automatic Virtual Environment
(CAVE) slideshare.net
In der mittels Stereoprojektion auf
die umgebenden Wände eines
Würfels projizierten Welt kann
mittels Datenhandschuh interagiert
und so ein multimodales Gefühl für
die räumlichen umgebenden Eigen-
schaften erzeugt werden
Head-Mounted-Display
auf dem Kopf getragenes visuelles
Ausgabegerät.
präsentiert Bilder entweder auf
einem augennahen Bildschirm oder
projiziert sie direkt auf die Netzhaut
z.B. Apple iGlass, Microsoft
HoloLens, Google Glass
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 49Mobile Felddatenerfassung
der Zukunft
Spracheingabe für Anweisungen und Attribute
Head up Display zur Visualisierung
Touchpad und Pencomputer am Gürtel oder
Handgelenk
Sensorik zur Messung
Freihanddistanzmesser
Elektronischer Kompass
Neigungsmesser
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 50Trends
Engere Kopplung der Hardware zur Erfassung von Daten an die Analyse
Always online: Trennlinie zwischen Erfassung im Felde und Verarbeitung im Büro
verschwindet.
Hardwareentwicklung profitiert von der allgemeinen IT-Entwicklung
Sensorik allgegenwärtig:
Neben den klassischen Gerätekomponenten ermöglicht die Sensoreinbettung in das
tägliche Leben neue Erfassungsverfahren.
Smartphones als Erfassungsgeräte.
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 51Selbststudium GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 52
Literatur-
hinweis
Bill (2016): Kapitel 2.1 und 2.2
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 53Videomaterial auf youtube
Tachymetrie
Stadt Duisburg - Vermessung | Tiger & Turtle
LENFERS Vermessungstechnik - Produktvideo Topcon IS
Leica Geosystems AG - Leica TPS700
Terrestrisches Laserscanning (TLS)
FARO Laser Scanner Focus3D - Eine Revolution im 3D Laser Scanning
Darling Geomatics - 3D Laser Scanning - Underground Mine Mapping
IngenieurTeam2 - AV Mariendom in Neviges
National Geograpic - Laser Scanning Reveals Cathedral’s Mysteries
GNSS
Adrian Jagusch - Wie funktioniert das GPS-System?
spacelivecast - Funktionsweise Galileo Satellitennavigation
RedaktionErde - Außerirdischer Wegweiser: Wie funktioniert GPS-Technik?
mobileGIS.at - Zeno Field - GIS-Datenerfassung mittels GPS
ATLOG INTERNATIONAL- TOPOGRAPHY and SURVEYING WITH GNSS
GI-Hardware UNIVERSITÄT ROSTOCK, Professur für Geodäsie und Geoinformatik 54Sie können auch lesen