Führung eines Schneeräumfahrzeuges mittels GPS-RTK - Markus Konopiski, Elke Umnig, Robert Weber
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Führung eines Schneeräumfahrzeuges mittels GPS-RTK
Markus Konopiski, Elke Umnig, Robert Weber
Ahorn, Davos 2012
29. November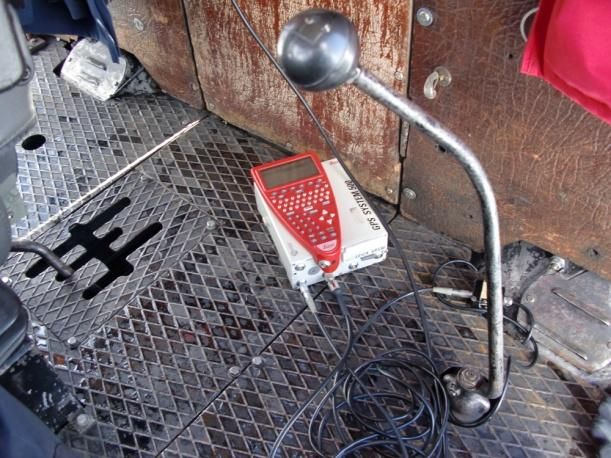
Inhalt
◦ GNSS-Überblick
◦ Projekt: Navigationshilfe für die Schneeräumung
◦ Das Messgebiet: Die Großglockner Hochalpenstraße
◦ Testfahrt
◦ Aspekte bei der praktischen Umsetzung der Echtzeitnavigation
2
Ahorn 2012
Global Navigation Satellite System
Operative/im Aufbau befindliche GNSS:
USA:
◦ NAVSTAR-GPS (NAVigation System with Time And Ranging-Global Positioning System)
Russland:
◦ GLONASS (GLObalnaya NAvigatsionnaya Sputnikovaya Systema)
Europa:
◦ GALILEO
China:
◦ COMPASS GPS
◦ Others:
SBAS (Space-Based Augmentation GLONASS
System)
GALILEO
3
Ahorn 2012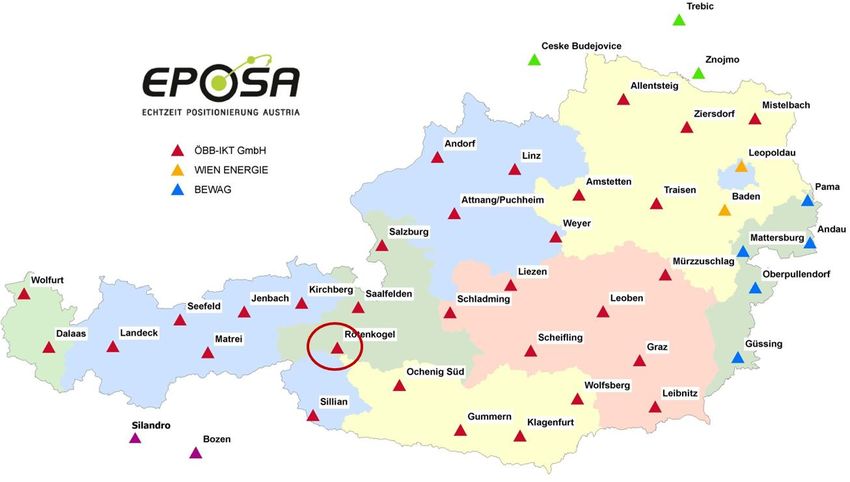
Positionsbestimmung
Absolute Positionierung
Fehlereinflüsse
Signalausbreitungsfehler
Satellitenfehler Empfängerfehler
Relative Positionierung
4
Ahorn 2012
Projektanwendung
◦ Kooperation: Großglockner Hochalpenstraßen AG und TU Wien
◦ Evaluierung eines GPS-gestützten Leitsystems
◦ Testmessungen im April 2012/Datenerstaufnahme
◦ Kooperation zwischen TU Wien und dem österreichischen
Echtzeitpositionierungsdienst EPOSA
5
Ahorn 2012
Schneeräumung auf der Großglockner Hochalpenstraße
Die Großglockner Hochalpenstraße:
◦ Historischer Alpenübergang und
Verkehrsweg
◦ 19. Jahrhundert: Erste touristische Erschließung der Hohen Tauern
◦ Erbauung der Straße: Konjunkturmaßnahme in den 1930er Jahren
◦ Touristische Nutzung: Motorsportveranstaltungen
◦ Heute: 900 000 Besucher pro Jahr
◦ Länge der Straße: 48 km, 36 Kehren, Hochtor: 2504 m
6
Ahorn 2012
Schneeräumung auf der Großglockner Hochalpenstraße
Händische Schneeräumung Schneeräumung unter Einsatz von
in den ersten beiden Jahrzehnten Maschinenfahrzeugen seit 1953
7
Ahorn 2012
Schneeräumung auf der Großglockner Hochalpenstraße
Sicherung und Markierung der Route in unmittelbarem Zusammenwirken mit dem
Schneeräumfahrzeug
8
Ahorn 2012
Ziel: Navigationshilfe mittels GPS-RTK
Rötenkogel
9
Ahorn 2012
Anbindung an Referenzstationen
10
Ahorn 2012Ziel: Navigationshilfe mittels GPS-RTK
GPS-Antenne/Empfänger
Testfahrt und GPS-Aufnahme der Straßenlage:
◦ Postprozessierung
◦ Anbindung an permanente Referenzstation:
- Rötenkogel + stationäre Station
◦ Phasen- und Codebeobachtungen
◦ Zweifrequenzmessung -> Linearkomb.
◦ Aufzeichnungsrate während der Messung: 1 sec
◦ IGS Final Orbits (http://igscb.jpl.nasa.gov/)
◦ Kommerzielle Auswertesoftware
- Phasenzentrumsexzentrizität
LEICA Geo Office - Instrumentenhöhe
Parametereinstellung:
Frequenz: Automatisch
Troposphärenmodellierung
11
Ahorn 2012Satellitensichtbarkeit
Anzahl der sichtbaren Satelliten während der Testfahrt:
GDOPs (min - max): 2.3 – 19.1
12
Ahorn 2012GPS-Trajektorie
- originäres Ergebnis: ITRF2000 (1997.0)
- Transformation ins Landeskoordinatensystem
(mittlerer Transformationsparametersatz)
- Keine digitale Information im Kontext zur
topographischen Umgebung
13
Ahorn 2012Diskussion: Koordinatenrahmen
◦ Koordinaten der Referenzstationen (je nach Betreiber):
- Realisierungen des ITRS/ETRS -> ITRF/ETRF
◦ Status des Datenbestandes entlang der Großglockner Hochalpenstraße muss geklärt
werden (existiert eine ausreichende digitale Koordinateninformation von der Straßenlage ?)
◦ Entscheidung seitens des Straßenbetreibers:
- Fahrzeugnavigation(im ITRF möglich)
- Dokumentation mittels GIS (z.B. Landeskoordinatensystem)
- Genauigkeitsanforderung: Dezimeterbereich
- Frage: (1) Erstellung von Transformationsparametern
(2) Möglichkeiten für den Echtzeitbetrieb
14
Ahorn 2012Referenzstationsnetze
Systemaufbau:
Rechenzentrum mit Software
Signallaufzeit 1 – 1.5 Sekunden
Referenzstationen
Referenzstationen mit GNSS- GPS/GLONASS-
Antenne (GPS+GLONASS)
Zweifrequenzempfängern Antenne
+ Empfänger
Empfänger
GSM/GPRS DGNSS-Signal
Internet per GSM
Kommunikationsverbindung
NTRIP-Server
Zentrale: Berechnung
DGNSS-Signal
GSM-Router
Korrekturdaten
NTRIP = Networked Transport of RTCM via Internet Protocol
RTCM = Radio Technical Commission for Maritime Services
15
Ahorn 2012Globale Koordinatenrahmen und
nationale Bezugssysteme
Beziehung zwischen aus GNSS-Messungen abgeleiteten 3-D Koordinaten
(ITRF/ETRF) und dem nationalen Bezugssystem:
◦ Nationale Bezugssysteme weisen aus historischen Gründen Verzerrungen
auf
◦ Regional angepasste Parametersätze
◦ Berechnung eines Residuenrasters mittels Passpunktmessungen
- EPOSA (1800 KTs)
Prinzip:
Gebrauchskoordinaten (ebene
ITRF (X,Y,Z) Koordinaten, GK-Österreich)
Mittlerer
7-Parametertransformation Inverse Gauß–Krüger Projektion
Transformationsparametersatz
Ellip. Koordinaten (Breite, Länge, Ellip. Koordinaten (Breite, Länge,
ellip. Höhe -> Besselellip.) ortho. Höhe -> Besselellip.)
Residuen: ΔBreite, ΔLänge, ΔHöhe 16
Ahorn 2012Residuenraster
Rasterlösung für Österreich:
◦ Auswertung der Messdaten an der TU Wien
◦ Residuen in Breite, Länge und Höhe
◦ Rasterinterpolation:
- Bikubische Spline Interpolation
◦ Raster an den Randgebieten:
- Extrapolation auf „virtuelle Festpunkte″ außerhalb Österreichs
◦ Ergebniskoordinaten: Ans Landessystem angepasste Koordinaten (Inhomogenitäten !)
17
Ahorn 2012Projektrealisierung
◦ Finanzierung seitens der Straßenbetreiber
◦ Erhebung des vorhandenen Datenbestandes
◦ (Neu)aufnahme der Straße und weitere Testfahrten
- mittels GNSS
◦ Echtzeitnavigation (z.B. ITRF/ETRF) und Dokumentation (GIS mit Landeskoordinaten)
◦ Ausrüstung am Schneeräumfahrzeug: Hard- und Software
◦ Überprüfen der Notwendigkeit einer eigenen Referenzstation/Reichweite der
Datenübertragung
◦ GNSS-Netzwerkbetreiber: GPRS-Verfügbarkeit im Projektgebiet ?
18
Ahorn 2012Besten Dank für die
Aufmerksamkeit !
Ahorn 2012Sie können auch lesen