Alles Messen White Paper - Vector
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten

Alles Messen White Paper
Alles Messen
Inhaltsverzeichnis
1 Wirklich alles messen ................................................................................................................................................................ 3
1.1 Überblick über die Werkzeuge.................................................................................................................................................. 3
1.2 Grundlegendes Messkonzept ................................................................................................................................................... 5
1.3 Messdatenformate ................................................................................................................................................................... 6
1.3.1 MDF ............................................................................................................................................................................................ 6
1.3.2 BLF.............................................................................................................................................................................................. 6
1.4 Zeitsynchronisierung................................................................................................................................................................. 6
1.5 Hardware und Betriebssystem ................................................................................................................................................ 6
1.5.1 CANape log und vMeasure log Hardware ............................................................................................................................... 6
2 Zugriff auf interne Steuergerätedaten ................................................................................................................................... 7
2.1 Beispiel: Motorsteuergerät ...................................................................................................................................................... 9
2.2 Beispiel: Getriebesteuergerät .................................................................................................................................................. 9
3 ADAS ........................................................................................................................................................................................ 10
3.1.1 Radar-Sensor ........................................................................................................................................................................... 10
3.1.2 Kamera-Sensor........................................................................................................................................................................ 10
3.1.3 LIDAR ....................................................................................................................................................................................... 12
3.2 ADAS Fusions-Steuergerät.................................................................................................................................................... 12
3.3 Fahrsituationen über Kontext-Kameras erfassen ............................................................................................................... 13
3.4 Fahrdaten über Inertial Systeme erfassen ........................................................................................................................... 13
3.4.1 Fahrdaten mehrerer Fahrzeuge gleichzeitig erfassen ......................................................................................................... 13
3.5 Positionsdaten über GNSS-Dienste erfassen ...................................................................................................................... 14
4 Bus-Zugang .............................................................................................................................................................................. 15
5 Messen Physikalischer Größen ............................................................................................................................................... 15
5.1 Einbindung über CAN und XCP on Ethernet ......................................................................................................................... 15
5.2 Einbindung über Treiber-Schnittstelle .................................................................................................................................. 16
5.2.1 Vector DAIO-Schnittstelle ..................................................................................................................................................... 16
5.2.2 XCP-Schnittstelle.................................................................................................................................................................... 16
5.2.3 Firmenspezifische Treiber ...................................................................................................................................................... 16
5.3 Hochvolt-Messungen nach DIN EN 61010 ............................................................................................................................ 16
5.4 Messungen am Verbrennungsmotor ..................................................................................................................................... 17
5.5 Messung von Kühlmittelkreisläufen ...................................................................................................................................... 18
6 Nicht Messbare Größen errechnen ........................................................................................................................................ 18
6.1 eMobilityAnalyzer für Elektrofahrzeuge ............................................................................................................................... 18
7 Diagnosedaten ........................................................................................................................................................................ 19
7.1 Security Mechanismen ............................................................................................................................................................ 19
8 Messdaten aus Virtuellen Steuergeräten erfassen ............................................................................................................. 19
8.1 Virtuelles Steuergerät in Simulink ......................................................................................................................................... 20
8.2 Product Information
Virtuelles Steuergerät in CANape ......................................................................................................................................... 20
8.3 Virtuelles Steuergerät in CANoe ........................................................................................................................................... 21
9 Engineering-Dienstleistungen ................................................................................................................................................ 22
V2.0 2022-01
2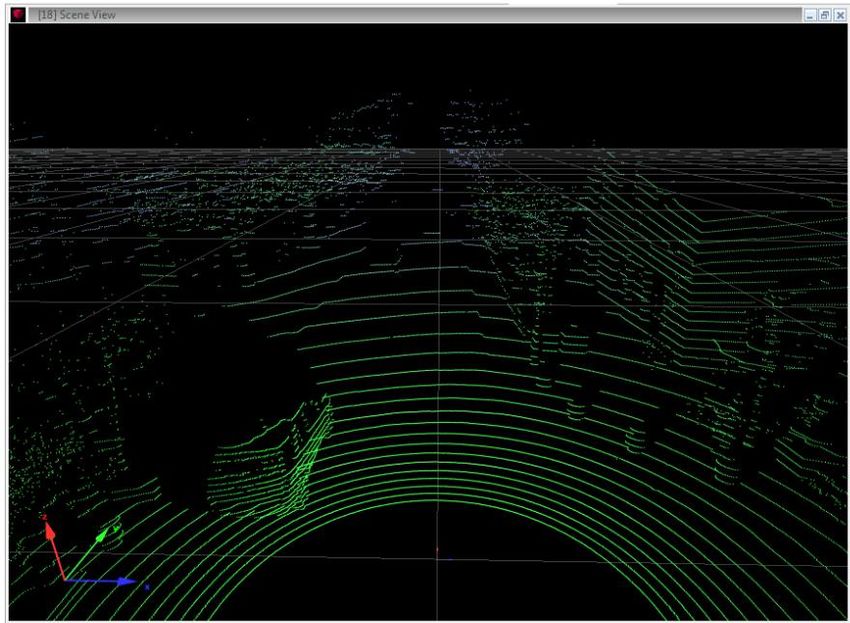
Alles Messen
1 Wirklich alles messen
Mit diesem Dokument gewinnen Sie einen Überblick, was Sie mit den Werkzeugen CANape, CANape log, vMeasure exp und
vMeasure log alles messen können.
Um die Funktionalität eines einzelnen Algorithmus oder eines ganzen Systems bewerten zu können, müssen die relevanten
Eigenschaften erfasst und gespeichert werden. Dies erfolgt durch den Einsatz von Messwerkzeugen, wie CANape und
vMeasure exp. Im Labor, an Prüfständen oder während der Fahrerprobung.
Im Automotive-Umfeld gibt es sehr viele unterschiedliche Quellen:
> Steuergeräteinterne Größen
> ADAS-Sensoren (Radar, LIDAR, Kamera, Ultraschall, …) zur Wahrnehmung des Fahrzeugumfelds mit allen relevanten
Objekten.
> Fahrzeug-Netzwerke: CAN, CAN FD, FlexRay, Automotive Ethernet, LIN.
> Analoge/digitale Messgrößen wie Temperaturen oder Spannungsverläufe im Nieder- und Hochvolt-Bereich. Bei der
Beobachtung von Inverter-Spannungsverläufen sind oft sehr hohe Abtastraten (bis in den Megahertz-Bereich) zum
Erkennen von Oberwellen notwendig.
> Kontext-Kameras zur Aufzeichnung der Fahrsituation oder zur Beobachtung des Fahrers. Die Datenrate einer Kamera
hängt dabei stark von der Auflösung, der Anzahl Bilder pro Sekunde und eventueller Komprimierungen ab.
> Positionsdaten, z.B. über GNSS, um den Zusammenhang zwischen den Messdaten und der Fahrzeugposition zu erhalten.
Je präziser die Ortsbestimmung des GNSS-Receivers (z.B. aus einem Inertial-System) ist, umso höher ist auch die
Datenrate.
> Diagnoseinformationen aus dem Fahrzeug, die z.B. über die OBD-Schnittstelle abgegriffen werden.
Zusätzlich gibt es Größen, die sich nicht einfach direkt messen lassen. Sie müssen aus Messgrößen errechnet werden. Sollen
diese Werte schon während der Messung zur Verfügung stehen, muss das Messsystem in der Lage sein, die Berechnungen
während der Messung durchzuführen.
Je nach Kombination und Anzahl der Quellen, sind oft mehr als 100.000 Signale zu erfassen. Die Messdaten werden
zeitsynchronisiert aufgezeichnet. Die Aufzeichnung werden über „Rekorder“ organisiert. Sie zeichnen kontinuierlich oder
getriggert auf.
1.1 Überblick über die Werkzeuge
CANape ist die Lösung für alle Messaufgaben. vMeasure exp ist aus CANape abgeleitet und hat als Schwerpunkt die Analog-
Messtechnik. Die Anwendung der beiden Werkzeuge erfolgt nutzergetrieben über die Benutzeroberflächen.
CANape log und vMeasure log haben keine Benutzeroberfläche. Sie dienen als Ablaufumgebung für CANape bzw. vMeasure
exp Konfigurationen. Es sind kombinierte Soft- und Hardware-Logger, die Sie in Fahrzeugen einbauen und verkabeln. Sie bieten
zwei Betriebsmodi an:
Standalone Mode: Der Logger arbeitet vollständig autark. Über ein Web-Interface haben Sie Zugriff auf Statusinformationen
des Loggers und können das Aufzeichnen der Daten manuell starten und stoppen.
Interaktiver Mode: Sie verbinden Ihren Laptop mit CANape oder vMeasure exp über Ethernet mit dem jeweiligen Logger. Über
die Benutzeroberfläche auf dem Laptop arbeiten Sie wie gewohnt. Sie haben Zugriff auf alle Daten, können die Konfiguration
ändern, Messdaten abrufen usw. Ohne dazu an der Verkabelung im Fahrzeug irgendetwas zu ändern.
Die unterschiedlichen Messlösungen im Überblick:
ADAS-Sensor-Messtechnik (CANape) : Unterschiedliche Sensoren, basierend auf Radar-, Kamera- oder LIDAR-Technik, können
mit CANape erfasst und die Daten abgespeichert werden. Es gibt bis zu drei unterschiedliche Datenarten: Die Sensor-Rohdaten
(z.B. einen Videodatenstrom), Objektlisten (detektierte Objekte im Umfeld des Fahrzeugs) sowie Daten, die in den Sensoren
verarbeitet und typischerweise mit XCP gemessen werden. Die Rohdaten der Sensoren werden nicht über standardisierte
Protokolle übertragen, sodass der Zugriff auf die Sensordaten über angepasste Aufzeichnungs-Rekorder erfolgt.
3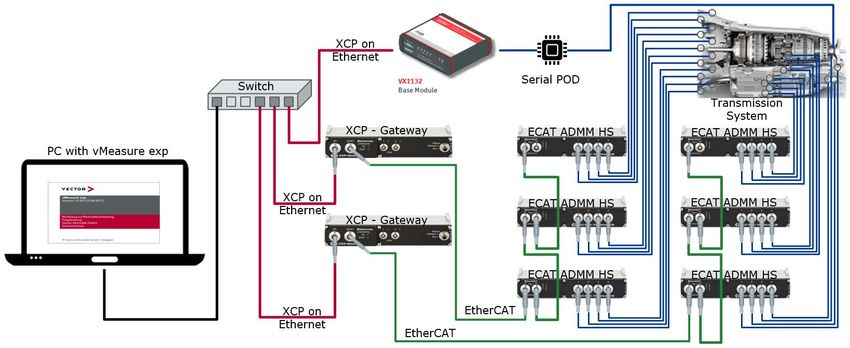
Alles Messen
Bus-Messtechnik (CANape, vMeasure exp): Die typischen Fahrzeug-Busse CAN, CAN FD, Automotive Ethernet, FlexRay und
LIN werden über die Vector Interfaces mit dem Messwerkzeug verbunden. CANape greift sowohl auf die übertragenen Signale
als auch auf die kompletten Botschaften zu. vMeasure greift auf die Signale zu.
Steuergeräte-Messtechnik (CANape, vMeasure exp): Das Standard-Protokoll XCP erlaubt den flexiblen Zugriff auf
Speicherinhalte des Steuergerätes. Dabei spielt es keine Rolle, ob ein XCP-Treiber im Steuergerät die Daten prozessiert oder
ob der Zugriff über die VX1000 Mess- und Kalibrierhardware erfolgt.
Analog-Messtechnik (CANape, vMeasure exp): Das Erfassen analoger Größen kann über verschiedene Schnittstellen erfolgen.
Da die Anforderungen an die Abtastraten und somit an die Datenmenge sehr unterschiedlich sind, nutzen die Lösungen
verschiedene Interfaces wie CAN, USB und Ethernet.
Hoch-Volt-Messtechnik (CANape, vMeasure exp): In Fahrzeugen mit elektrischen Antrieben gibt es eine Fülle an Mess- und
Berechnungsaufgaben. Nicht alle Größen können direkt gemessen werden. Zum Berechnen der elektrischen Kenngrößen einer
E-Maschine werden die drei Phasenströme und die Leiter-zu-Leiter-Spannungen erfasst. Um auch die Oberwellen mit zu
berücksichtigen, erfolgt die Abtastung im Megahertz-Bereich. Die Berechnung der Leistungsgrößen erfolgt während der
Messung.
Diagnose-Messtechnik (CANape, vMeasure exp): Über OBD haben beide Werkzeuge Zugriff auf fahrzeugspezifische Diagnose-
Daten. In CANape steht zusätzlich der Zugriff auf die Diagnosedaten von Steuergeräten über KWP2000 oder UDS zur
Verfügung.
Positionsdaten (CANape, vMeasure exp): Während der Fahrversuche ist es oftmals wichtig, den Zusammenhang zwischen
Fahrzeugposition und Messwerten genau nachvollziehen zu können. Die Interpretation der aufgezeichneten Messdaten wird
dadurch erheblich erleichtert, da die geografischen Gegebenheiten bei der Auswertung berücksichtigt werden. Dazu werden
die Positionsdaten aufgezeichnet. Die Informationen stammen aus Fahrzeugdaten, die bereits auf dem CAN-Bus zur
Verfügung stehen oder über einen separaten GNSS-Receiver erfasst werden.
Kontext-Kameras (CANape): Als Kontext-Kameras kommen Videokameras zum Einsatz, die über USB oder Ethernet
angeschlossen werden und die Fahrsituation aufzeichnen. Im Gegensatz zu kamerabasierten Sensoren, die auch eine
Datenverarbeitung durchführen, liefern die Kontext-Kameras nur Videodaten. CANape erfasst die Daten und speichert sie in
einem Videoformat (AVI) zeitsynchron zu anderen Messdateien auf.
Offene Schnittstellen (CANape, vMeasure exp): Zur Integration beliebiger Messsysteme stehen offene Schnittstellen zur
Verfügung.
vMeasure exp / CANape /
vMeasure log CANape log
Unterstützung von ADAS-Sensoren Nein Radar, LIDAR, Kamera
Spezifische Protokolle und Sensoren Nein Ja
Automotive Netzwerke CAN, CAN FD, LIN, FlexRay, Automotive Ethernet
Protokolle und Netzwerk-Interfaces CAN, CAN FD, FlexRay, Automotive Ethernet, LIN, XCP, SOME/IP,
DLT, VX1000, Kamera, GNSS, Analoge Messtechnik, …
Unterstützte Beschreibungsdateien A2L, AUTOSAR arxml, DBC, Fibex, LDF, XML
Signalbasiertes Aufzeichnen Ja
Botschaftsbasiertes Aufzeichnen Nein Ja
Roh-/Debugdaten Aufzeichnen Nein Ja
Zeitsynchronisation Software, Vector Hardware Sync Line,
IEEE1588 (PTP)
Online-Berechnungen Ja
eMobility Analyzer enthalten Ja
Messdatenformat MDF 3.2, 4.0 und 4.1
Mobile UI Ja
4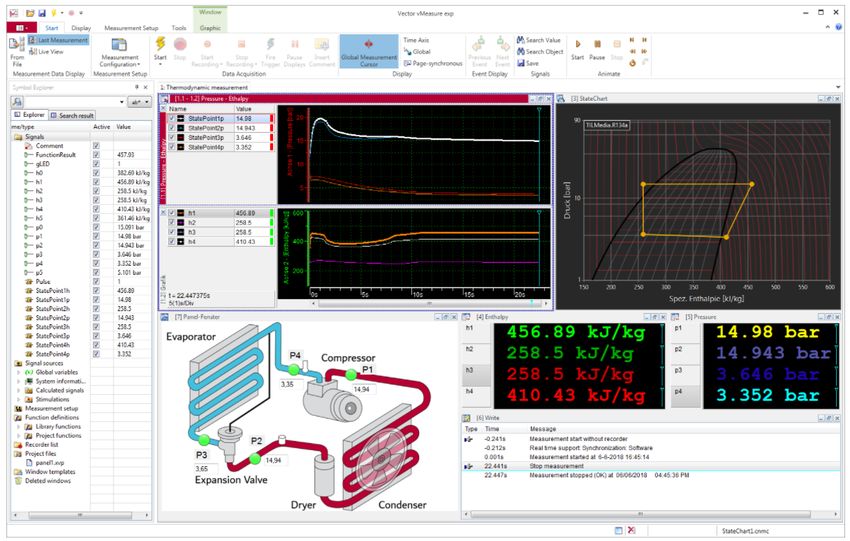
Alles Messen
1.2 Grundlegendes Messkonzept
Die unterschiedlichen Datenquellen werden über Beschreibungsdateien (z.B. A2L, ARXML) definiert und als „Geräte“ in der
Messsoftware angelegt. Durch die manuelle Auswahl aus der Beschreibungsdatei wird festgelegt, ob ein Objekt gemessen
werden soll. Durch die Art der Auswahl wird entschieden, ob die Werte des Objektes während der Messung visualisiert werden
sollen.
Rekorder legen die Messwerte in Messdateien ab. Jeder Rekorder schreibt eigene Messdateien. Es können parallel mehrere
Rekorder gleichzeitig genutzt werden. Die Aufzeichnung eines Rekorders erfolgt entweder kontinuierlich ab dem Messungsstart
oder die Aufzeichnung beginnt und endet mit individuellen Trigger-Ereignissen. Die Signalquellen/Geräte werden den Rekordern
zugeordnet.
Speziell ADAS-Sensoren liefern Rohdaten über herstellerspezifische Protokolle. Diese Daten werden von sogenannten
„Distributed High Performance Recordern“ (DHPR) erfasst. Ein DHPR läuft als eigene Messinstanz. Sie kann auf dem gleichen
Computer wie CANape laufen oder aber auf einem zusätzlichen Computer, der über Ethernet mit dem CANape Computer
verbunden ist. Somit können nahezu beliebige Datenmengen über das skalierbare Computer-Cluster erfasst werden. Die
DHPR-Architektur erlaubt es, zu jeder Zeit einen weiteren Sensortyp in CANape zu unterstützen. Bitte kommen Sie auf uns zu.
Alle Instanzen werden von CANape aus verwaltet und gesteuert. Die Datenerfassung zwischen allen Rekordern und DHPRs ist
zeitsynchronisiert.
Bild 1 Skalierbare Lösung durch die Rekorder Architektur
Vorteile im Überblick:
> Die Rekorder erlauben es die gesamte Messaufgabe aufzuteilen: Beispielsweise kann ein Rekorder dazu genutzt werden,
alle Signale, die zum Schaltvorgang 1–2 im Getriebe gehören, in eine Messdatei zu schreiben. Mit x Sekunden Vorlauf vor
dem Schaltvorgang und y Sekunden Nachlauf.
> Die High Performance Recorder bieten die individuelle Schnittstelle für die Sensortechnik und für XCP-on-Ethernet-
Geräte. Sie nutzen die Computer-Ressourcen optimal aus und stehen auch für das verteilte Aufzeichnen über mehrere
Computer hinweg zur Verfügung.
> Sie benötigen in einem Computer-Cluster nur eine CANape Lizenz, unabhängig von der Anzahl der verwendeten
Computer.
> Die zeitliche Synchronisierung der Messdaten und das Auslösen von Trigger-Ereignissen geschieht präzise mit CANape
bzw. vMeasure exp.
> Jeder Rekorder schreibt seine Daten in eine eigene Messdatei. Damit sind die einzelnen Dateien kleiner und leichter zu
verarbeiten. Sollten z. B. Daten eines Sensors an den Hersteller oder Entwicklungspartner weitergeleitet werden, so
entfällt das Separieren der Signale und das Abspeichern in einer zusätzlichen Datei.
5
Alles Messen
1.3 Messdatenformate
Während einer Messung können viele Messdateien aufgezeichnet werden. Zum einen, weil Messdateien parallel geschrieben
und zum anderen, weil sie bewusst in der Größe oder zeitlichen Länge begrenzt werden. Beispielsweise werden Messdateien
von bestimmten ADAS-Sensoren auf eine Länge von 90 Sekunden begrenzt, weil die Re-Simulationskette darauf optimiert ist.
Mit unseren Aufzeichnungsmöglichkeiten haben Sie alle Freiheitsgrade, die Messdateien ihren Anforderungen anzupassen.
1.3.1 MDF
MDF ist das Standardformat der hier beschriebenen Werkzeuge. Es ist ein Binärformat und seit der Version 4.0 ein ASAM
Standard. ASAM MDF konzentriert sich auf die persistente Speicherung von aufgezeichneten oder berechneten Messdaten für
die Nachbearbeitung von Messungen, die Offline-Auswertung und die langfristige Speicherung. Als standardisiertes Format
dient es auch dem Datenaustausch zwischen verschiedenen Werkzeugen. Die Datenablage in einer MDF Datei ist indiziert. Das
ermöglicht beim Betrachten oder Auswerten den direkten Sprung an beliebige Stellen einer Aufzeichnung, ohne die gesamte
Datei einlesen zu müssen.
Anwendungsgebiete und Eigenschaften des ASAM MDF:
> Keine echte Größenbeschränkung (maximale Größe 2^64 Bytes)
> Speicherung von Signalwerten
> Speicherung des Busverkehrs für gängige Bussysteme
> Aufzeichnung von synchronisierten Videodaten und Radarinformationen
> Komprimierung von Messdaten
> Speichereffiziente Datenablage für Kanäle mit konstantem Wert oder variabler Datenlänge
> Speicherung von Klassifizierungsergebnissen
> Speicherung von zusätzlichen Informationen über die Messumgebung
1.3.2 BLF
BLF ist die Abkürzung für Binary Logging Format. Es dient der Aufzeichnung des Busverkehrs. Dateien in diesem Format
werden gerne genutzt, um den aufgezeichneten Busverkehr zu einem späteren Zeitpunkt wieder auf einen Bus zu senden.
1.4 Zeitsynchronisierung
Die Tools unterstützen drei verschieden Arten der Zeitsynchronisation:
Software-Synchronisation: Die Software Zeitsynchronisation ist treiberbasiert. Messdaten liefern entweder einen Zeitstempel
mit (z.B. bei XCP-Messungen) oder es wird die Interfacezeit des Empfangszeitpunkts (z.B. ein CAN-Frame kommt im CAN-
Interface an) verwendet. Die Zeitstempel werden auf die Systemzeit referenziert und miteinander verrechnet.
Vector Hardware Sync Line: Eine präzisere Zeitsynchronisation von mehreren Vector Geräten ist durch die Hardware-
Synchronisation möglich. Die Vector Netzwerk-Interfaces werden dazu über Synchronisationskabel miteinander verbunden.
IEEE1588 (PTP): Beim Precision Time Protocol (PTP) Verfahren werden Uhren über ein Ethernet Netzwerk miteinander
synchronisiert. In einem lokalen Netzwerk werden Genauigkeiten im Nanosekunden-Bereich realisiert. Als Zeitstempelformat
kommt UTC (Coordinated Universal Time) zum Einsatz. Die genauste Uhr im Netzwerk definiert die Uhrzeit, auf die sich alle
anderen Uhren im Netzwerk synchronisieren. In Verbindung mit GNSS-Diensten kann auch die Satellitenzeit als Zeitquelle
verwendet werden.
1.5 Hardware und Betriebssystem
CANape und vMeasure exp können generell auf jeder geeigneten Computer-Plattform mit Windows Betriebssystem genutzt
werden.
1.5.1 CANape log und vMeasure log Hardware
Zur Optimierung der Loggerlösung wurden die Computer-Hardware und die Messsoftware unter anderem in den Punkten
Energiemanagement, Festplatten-Handhabung und Messperformance aufeinander abgestimmt. Dadurch entstand eine
Gesamtlösung mit mehreren Hardware-Plattformen.
6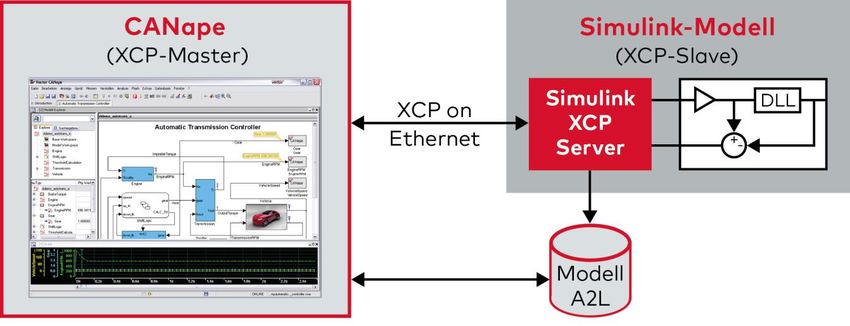
Alles Messen
Vorteile im Überblick:
> CANape log und vMeasure log sind Logger. Der Zugriff erfolgt immer nur über CANape bzw. vMeasure exp. Es gibt keine
IT-Administration, Firewall oder ähnliches.
> Keine Übertragungsfehler bei der Konfiguration der Logger. Im Interaktiven Modus erstellen und testen Sie ihre
Konfiguration. Ist alles in Ordnung, speichern Sie die Konfiguration auf dem Logger ab. Ab jetzt läuft der Logger autark.
> Für die unterschiedlichen Ansprüche stehen unterschiedliche Hardware-Plattformen zur Verfügung.
> Speichermedien sind einfach zugänglich und der Austausch ist mit wenigen Handgriffen durchgeführt. Alternativ können
Sie die Daten über Ethernet-, bzw. USB-Schnittstellen kopieren. Oder Sie nutzen eine separate Auslesestation für die
Speichermedien, um die Messdaten schnell herunterzuladen.
> Sie verwalten die Logger am einfachsten über die Vector Logger-Cloud.
> Einfache Montage des Gesamtsystems.
> Geringer Verkabelungsaufwand.
Relevante Vector Produkte sind:
Produktname Funktion
CANape Universales Mess- und Kalibrier-Tool.
CANape log CANape log ist auf dem Computer vorinstalliert und das Gesamtsystem für die
Nutzung als Datenlogger optimiert.
vMeasure exp Für den Anwendungsfall der analogen Messtechnik zugeschnitten.
vMeasure log vMeasure log ist auf dem Computer vorinstalliert und das Gesamtsystem für die
Nutzung als Datenlogger optimiert.
vLoggerCloud Vector Logger Cloud für das Management der Vector Logger Familien.
VX1000 Physikalische Schnittstelle für die Anbindung an Embedded Systeme: Debugging- und
Trace-Schnittstellen, PCIe, ..
Smart Logger Finden Sie die passende Logger-Hardware für Ihren Anwendungsfall.
Hardware
2 Zugriff auf interne Steuergerätedaten
In diesem Kapitel geht es um den Zugriff auf Steuergerätedaten ohne Diagnoseprotokolle. Der Zugriff über Diagnose wird
separat behandelt.
Um direkt auf interne Daten eines Steuergeräts zugreifen zu können, stehen drei Wege zur Verfügung:
> Das XCP-Protokoll ist als Treiber im Steuergerät implementiert. Die Kommunikation erfolgt über eine Bus-Schnittstelle
wie CAN, CAN FD, Automotive Ethernet oder FlexRay.
> Über Mikrocontroller-spezifische Schnittstellen wie z.B. DAP, Aurora oder JTAG lässt sich ebenfalls ein Datenzugang
realisieren. Dies geschieht über die VX1000 Mess- und Kalibrierhardware, die aus einem POD (Plug-On Device) und einem
Basismodul besteht. Der POD befindet sich in unmittelbarer Nähe des Steuergeräts und überträgt den
schnittstellenspezifischen Datenstrom an das Basismodul. Das Basismodul setzt den Datenstrom des PODs in XCP on
Ethernet um.
> Der XPOD (XCP-POD) liefert selbst direkt XCP-on-Automotive-Ethernet-Daten. Es ist kein Basismodul, sondern nur ein
Umsetzer von Automotive Ethernet in USB/Ethernet notwendig.
7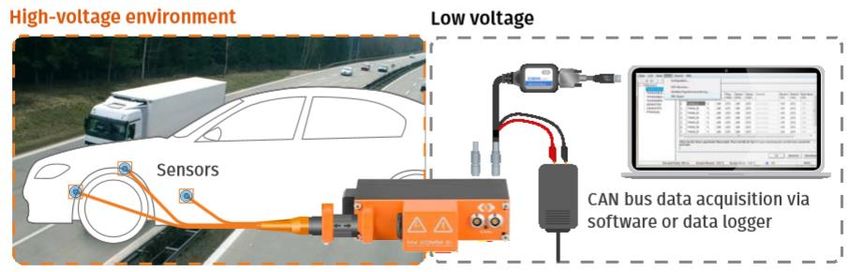
Alles Messen
Bild 2 Unterschiedliche Verbindungen zwischen Computer und Steuergeräten
Der Zugang über XCP und eine Busschnittstelle hat den Vorteil, dass auch in Serienfahrzeugen der Zugriff auf
Steuergerätedaten prinzipiell möglich ist. Allerdings ist der Messdatendurchsatz durch das Bussystem beschränkt – sowohl
was die minimale Abtastrate als auch die maximale Datenmenge angeht: Sie liegt bei CAN bei ca. 50 kBps und einer minimalen
Abtastzeit von 1 ms. Vorausgesetzt der CAN-Bus wird nicht für andere Buskommunikation genutzt. Des Weiteren werden
Systemressourcen wie CPU-Zeit und Speicher im Steuergerät benötigt.
Mit der VX1000 Lösung stehen wesentlich höhere Abtastraten und größere Datenmengen zur Verfügung. Entscheidend für die
Performance ist dabei die Controller-spezifische Schnittstelle. Diese wird mit dem POD verbunden. Der POD befindet sich im
oder in unmittelbarer Nähe des Steuergeräts. Es gibt drei unterschiedliche POD-Arten: HSSL, XPOD und Seriell.
Bild 3 Beispiel HSSL POD VX145x (40x35x9mm)
Die Namen leiten sich von der Anschlusstechnik des PODs ab.
Die HSSL-PODs setzen auf Daten-Trace-Schnittstellen wie z. B. Aurora, Nexus-Klasse 3 oder RTP der Controller auf. Die
maximale Datenrate ist – abhängig von der Schnittstelle – einige 10 Megabyte/s. Die Daten werden ohne Controller-Belastung
übertragen.
Serielle PODs werden über serielle Schnittstellen, wie z.B. JTAG oder DAP mit dem Controller verbunden. Zum Transport der
Messdaten entsteht auf dem Controller eine gewisse CPU-Belastung. Die maximale Datenrate liegt im einstelligen
Megabyte/s-Bereich.
HSSL und serielle PODs werden mit einem Basismodul verbunden. Das Basismodul setzt dann die Daten in einen XCP-on-
Ethernet-Datenstrom um, der von einem XCP-Master, wie CANape, CANoe oder Etas INCA, genutzt werden kann.
Es gibt mehrere Bauformen der Basismodule, die noch über CAN-, FlexRay- und Ethernet/Automotive-Ethernet-Schnittstellen
verfügen.
8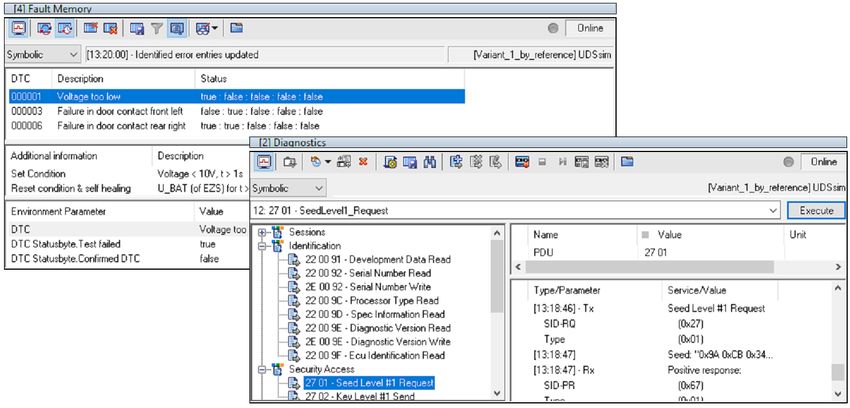
Alles Messen
Bild 4 VX1000 Basismodule und PODs
Der XPOD liefert direkt einen XCP-on-Automotive-Ethernet-Datenstrom. Ein VX1000 Basismodul für den Anschluss an den
Computer ist also nicht notwendig. Ein XPOD kann an jede Automotive-Ethernet-Schnittstelle der Vector Hardware
angeschlossen werden.
Weitere Informationen zur Mess- und Kalibrierhardware:
> Internetseite
> Übersichts-Poster mit allen Systemkomponenten
> Ethernet Interfaces
2.1 Beispiel: Motorsteuergerät
Die VX1000 Lösungen kommen sowohl im Verbrenner- als auch im Elektro-Motor zum Einsatz. Die Anforderungen an die
Messtechnik unterscheiden sich stark voneinander.
Ein Verbrennungsmotor ist durch Funktionen, wie z.B. Kaltstart und Abgasnachbehandlung technisch komplexer.
Beispielsweise ist es für das Messen des Kaltstartverhaltens notwendig, dass die Messtechnik schon für dem Starten des
Motors zur Verfügung steht. Allerdings ist die Abtastrate eher gering (gekoppelt an die Drehzahl des Motors sind es einige
wenige KHz) und die Datenmenge beläuft sich meist auf einige wenige Megabyte pro Sekunde.
Der Elektromotor ist technisch einfacher. Da aber hochfrequente Oberwellen eine große Rolle spielen, müssen die Signale mit
Abtastraten bis in den MHz-Bereich erfasst werden.
2.2 Beispiel: Getriebesteuergerät
Liegt das Getriebesteuergerät in der Ölwanne, so beschränkt sich der traditionelle Zugang auf XCP on CAN bzw. FlexRay.
Dadurch ist die Messbandbreite jedoch sehr stark begrenzt.
Um eine deutlich höhere Datenrate zu erreichen, steht eine auf VX1000 basierte Lösung zur Verfügung. In der Messölwanne
wird die Controller-Schnittstelle über eine Verlängerung bis zur Wand der Ölwanne geführt. Über eine Steckverbindung im
Gehäuse der Ölwanne ist der im Anschlusskabel integrierte POD angeschlossen.
9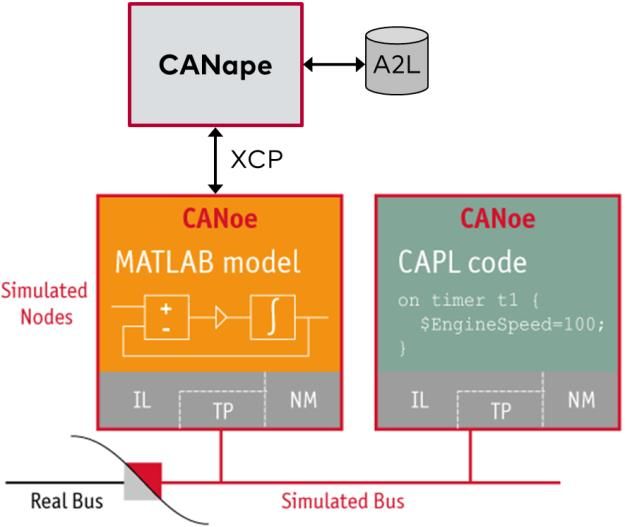
Alles Messen
3 ADAS
Für die Entwicklung von Fahrer-Assistenz-System bis hin zum autonomen Fahren, werden unterschiedliche Komponenten
benötigt.
ADAS-Sensoren erfassen die Umgebung um das Fahrzeug herum. Sie basieren auf unterschiedlichen Technologien, wie Radar,
Kamera und LIDAR. Die Sensoren detektieren Objekte, wie z.B. andere Verkehrsteilnehmer, Fahrspuren und Verkehrszeichen.
Jede Sensor-Technologie hat bestimmte messtechnische Vorteile. Durch die Fusion der unterschiedlichen Sensordaten, werden
weiterführende Informationen gewonnen. Der Messbereich wird vergrößert und die Zuverlässigkeit sowie die Genauigkeit der
Messungen erhöht. Die Fusion findet in Hochleistungs-Steuergeräten statt.
Um Fahrsituationen im Nachhinein betrachten zu können, werden Kontext-Kameras im Fahrzeug verbaut und die Videodaten
mit aufgezeichnet. So kann im Nachhinein die reale Fahrsituation nachvollzogen werden.
Inertial-Systeme liefern Informationen der Nick-, Wank- und Gierrate eines Fahrzeugs. Zusätzlich werden in aller Regel noch
die Beschleunigungen in allen Raumrichtungen erfasst. In Verbindung mit GNSS Daten liefert das System weitere Daten, wie
die genaue Position und Geschwindigkeit.
Weiterführende Informationen zur ADAS finden Sie hier.
3.1.1 Radar-Sensor
Bild 5 Radar Sensor liefert Roh-, XCP- und Objekt-Daten über VX1000 Hardware und CAN-Interface
Ein Radar-Sensor liefert bis zu drei unterschiedliche Datenarten: Die Rohdaten, Objektlisten (detektierte Objekte) sowie Daten,
die im Sensor verarbeitet und typischerweise mit XCP gemessen werden. Die Rohdaten werden mit herstellerspezifischen
Protokolle übertragen. Dazu wird ein angepasster DHPR benötigt.
3.1.2 Kamera-Sensor
ADAS-Sensoren auf optischer Basis liefern Videobilder. Die Übertragung von Videobildern vom Bildsensor zum Bild Signal
Prozessor erfolgt über Serializer / Deserializer. Die Daten aus dem Bildsensor werden parallel zum Serializer übertragen. Von
dort geht es über z.B. eine Koaxial-Leitung zum Deserializer. Der parallelisiert die Daten wieder für den Bild Signal Prozessor.
Bild 6 Skizzierte Datenübertragung vom Bildsensor zum Bild-Prozessor
10Alles Messen
Unterbricht man die Verbindung zwischen Serializer und Deserializer können die Bilddaten direkt im Messsystem erfasst
werden. In diesem Fall liefert der Sensor die Daten nur an das Messsystem.
Bild 7 Die Daten werden direkt vom Messsystem erfasst
Der häufige Fall ist, dass der Sensor die Daten zur Weiterverarbeitung weiterreichen muss. Dazu ist es auch notwendig, die
Verbindung zwischen Serializer und Deserializer aufzutrennen. Die Daten des Serializers werden dann über einen Port in das
Messsystem übergeben und über einen zweiten Port wieder ausgegeben.
Die Daten werden im VX1161 abgegriffen und an CANape zur Speicherung weitergeleitet.
Bild 8 Im TAP-Mode werden die Daten durch das Messsystem geführt.
11Alles Messen
3.1.3 LIDAR
LIDARE (LIDAR = Light detection and ranging) arbeiten mit Laserlicht nach dem Radar-Prinzip, um Abstände und
Geschwindigkeiten zu messen. Sie liefern ihre Messergebnisse über Ethernet. Das Übertragungsprotokoll ist nicht
standardisiert. Ein Ethernet Logger kann die Ethernet Pakete zwar einfach aufzeichnen, aber eine Visualisierung der Ergebnisse
setzt voraus, dass das Protokoll interpretiert werden kann. In CANape werden eine ganze Reihe von LIDARE der
unterschiedlichen Hersteller unterstützt. Die Erfassung der Daten erfolgt über herstellerspezifischen DHPRs.
Bild 9 LIDAR-Messdaten Darstellung als Punktewolke
3.2 ADAS Fusions-Steuergerät
Ein Fusions-Steuergerät verfügt in aller Regel über einen Prozessor und einen Mikro-Controller. Der Prozessor liefert die
notwendige Rechenleistung für die Berechnung der Fusionsalgorithmen. Während des Entwicklungsprozesses werden Daten
aus dem Prozessor und aus dem Controller benötigt.
Bild 10 Aus dem Fusions-Steuergerät werden die Daten über verschiedene Wege erfasst: PCIe, DLT, SOME/IP, ..
Neben den Daten, die z.B. über PCIe aus dem Steuergerät heraus übertragen werden, kommen noch weitere Ethernet
Protokolle, wie z.B. DLT (Diagnostic Log and Trace) und SOME/IP (Service Oriented Middleware over IP) zum Einsatz.
12Alles Messen
3.3 Fahrsituationen über Kontext-Kameras erfassen
Um Messdaten aus Fahrversuchen gut interpretieren zu können, helfen Videoaufzeichnungen aus Kontext-Kameras. Sie
werden im Fahrzeug verwendet, um z. B. die Aktivitäten des Fahrers oder die Fahrsituation nach vorne zu erfassen. Die
Videodaten werden dabei mit CANape zeitsynchron mit allen anderen Messdaten im AVI-Format aufgezeichnet.
Kontext-Kameras integrieren Sie über verschiedene Wege in die Messung:
> Verfügt der Kameratreiber über eine DirectShow-Schnittstelle kann im Tool direkt darauf zugegriffen werden.
> AVB (Audio Video Bridging)-Kameras können direkt als Gerät angelegt und verwendet werden.
> Modulare Kamerasysteme, bei denen die Sensoreinheit mit Objektiv von der Haupteinheit getrennt positioniert wird. Das
Videobild wird an die Haupteinheit übertragen und dort z.B. komprimiert und analysiert. .
> Über das SDK (Software Development Kit) der Kamera entwickelt Vector einen Treiber, um die Kamera einzubinden.
Zur Entwicklung von Fahrerassistenzsystemen bietet die Option „Driver Assistance“ die Möglichkeit, das Kamerabild mit
weiteren Informationen zu überlagern. Zusätzlich steht eine Darstellung aus der Vogelperspektive zur Verfügung, in der die
Objekte mit den Entfernungsangaben dargestellt werden.
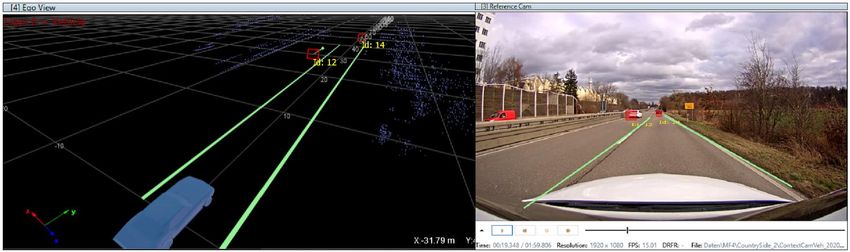
Bild 11 Darstellung aus der Vogelperspektive und im Videobild. Darstellung einer Kontext-Kamera in CANape mit überlagerten
Objekten, die durch Sensoren ermittelt werden.
3.4 Fahrdaten über Inertial Systeme erfassen
Inertial Systeme erfassen präzise Informationen über alle Bewegungszustände wie Beschleunigung, Geschwindigkeit, Position,
Drehgeschwindigkeit, Lage- und Schwimmwinkel eines Fahrzeugs. Sie dienen zum einen der Erzeugung von Ground Truth-
Daten für die ADAS-Entwicklung und zum anderen für alle möglichen Fahrdynamikuntersuchungen. Ihre Daten übertragen sie
über CAN oder ein herstellerspezifisches Protokoll über Ethernet.
Im Falle der Datenübertragung über CAN wird nur ein CAN-Interface und die passende Beschreibungsdatei benötigt, um die
Daten aufzuzeichnen bzw. zu visualisieren.
Für die Nutzung der Inertial Systeme über Ethernet, werden Protokoll-Dekoder zur Interpretation der spezifischen Protokolle
verwendet. Es werden bereits mehrere Hersteller unterstützt. Sollten Sie Bedarf an der Unterstützung weiterer Hersteller
haben, kommen Sie bitte auf uns zu.
3.4.1 Fahrdaten mehrerer Fahrzeuge gleichzeitig erfassen
Beispiel mit dem GNSS-gestützten Kreiselsystem ADMA von GeneSys:
Für die ADAS-Erprobung unterstützt CANape mit einem Protokoll-Dekoder auch das ADMA-Kreiselsystem von GeneSys.
Damit können Benutzer mittels Ethernet-Schnittstelle sämtliche ADMA-Messdaten mehrerer vernetzter Fahrzeuge erfassen
und miteinander verrechnen – vollsynchron und in Echtzeit.
13Alles Messen
Mit dem ADMA lassen sich alle Bewegungszustände wie Beschleunigung, Geschwindigkeit, Position, Drehgeschwindigkeit,
Lage- und Schwimmwinkel eines Fahrzeugs mit hoher Präzision unter Bewegung erfassen. Darüber hinaus ermöglicht die
ADMA DELTA-Funktion zentimetergenaue Messungen zwischen mehreren Fahrzeugen, wie z.B. Messung des Abstandes, der
Relativgeschwindigkeit und des Relativwinkels. Dies erfolgt in Echtzeit nur mittels WLAN-Verbindung zwischen zweier ADMAs,
eine zusätzliche Hardware ist nicht erforderlich. Die Berechnung erfolgt direkt im ADMA. Dadurch wird die Validierung und der
Test aller Arten von Abstandssensoren (z.B. Radar oder LIDAR) und Fahrerassistenzsystemen (z.B. Abstand)
Bild 12 Erfassung vollsynchroner ADMA-Messdaten
mit CANape mittels WLAN-Verbindung
mehrerer ADMAs
3.5 Positionsdaten über GNSS-Dienste erfassen
Positionsdaten können über GNSS-Dienste aufgezeichnet werden. Die Erfassung der Positionsdaten erfolgt entweder über
separate GNSS-Empfänger oder über Inertial-Systeme. Werden die Positionsdaten schon im Fahrzeug erfasst und z.B. über
einen CAN-Bus zur Verfügung gestellt, können die Daten auch über diesen Weg erfasst werden.
Die Visualisierung der Position und Strecke erfolgt im Karten-Fenster. Unabhängig davon, ob es während der Messung oder
auf der Basis von Messdaten erfolgt. Als Kartenmaterial steht unter anderem OpenStreetMap, HERE und beliebige Bilddaten
(z.B. zur Darstellung von Teststrecken) zur Verfügung.
Neben der Visualisierung im Kartenfenster, können die Signale in Funktionen und Skripten verwendet und in Anzeigefenstern
dargestellt werden.
Bild 13 Fahrstrecken- und Positionsdarstellung im Kartenfenster
14Alles Messen
4 Bus-Zugang
Vector bietet für alle Automotive-typischen Datenbusse eine passende physikalische Schnittstelle an: CAN, CAN FD, FlexRay,
Automotive Ethernet und LIN.
Sie können durch das Einbinden der jeweiligen Hardware und der Beschreibungsdateien auf die Busdaten zugreifen.
Bild 14 CAN-Bus-Darstellung im Trace-Fenster von CANape
Weitere Informationen zu den Vector Netzwerk-Interfaces finden Sie im Internet.
5 Messen Physikalischer Größen
5.1 Einbindung über CAN und XCP on Ethernet
Physikalischen Größen, wie z.B. Spannungen und Temperaturen, werden analog über Sensoren erfasst und über Messmodule
digitalisiert. Die Übertragung an das Messsystem erfolgt meist über CAN oder XCP on Ethernet. Alle Hersteller, die diesen
Übertragungsweg nutzen, werden unterstützt. Z.B. CSM, ETAS, HBM und Ipetronik.
Bild 15 Messaufbau für das Erfassen vieler Spannungen und Steuergeräte internen Größen an einem Getriebe.
In der Abbildung ist zu sehen, dass die Spannungen über Sensoren erfasst und in den ADMM Messmodulen digitalisiert werden.
Letztendlich laufen die Daten in XCP-Gateways zusammen. Von dort werden sie als XCP on Ethernet Datenstrom an das
Messsystem weitergeleitet. Über die Vector VX1000 Hardware werden Daten aus dem Steuergerät erfasst und ebenfalls über
XCP on Ethernet an das Messsystem übertragen. Hersteller der ADMM Module und XCP Gateways ist die Firma CSM.
15Alles Messen
5.2 Einbindung über Treiber-Schnittstelle
5.2.1 Vector DAIO-Schnittstelle
Die DAIO-Schnittstelle („digitaler/analoger Input/Output“) ist eine universelle offene Schnittstelle zur Integration beliebiger
Messtechnik. Den dazu notwendigen Treiber können Sie selbst entwickeln oder von Vector entwickeln lassen. Sprechen Sie mit
uns, wenn Sie Messdaten beliebiger Systeme benötigen.
5.2.2 XCP-Schnittstelle
XCP ist als Protokoll universell einsetzbar. Möchten Sie aus einer eigenen Messlösung oder System Messdaten erfassen, so
stehen Ihnen unsere kostenlosen XCP-Treiber zur Verfügung. Integrieren Sie den Treiber und Sie haben direkt Zugriff auf die
internen Größen Ihres Systems.
5.2.3 Firmenspezifische Treiber
National Instruments bietet über den DAQmx-Treiber Zugriff auf ihre DAQ-Messmodule. Dazu muss der DAQmx-Treiber auf
dem gleichen Computer installiert werden, wie CANape oder vMeasure exp.
5.3 Hochvolt-Messungen nach DIN EN 61010
Messen direkt im Hochvoltbordnetz, etwa in den Batterie-Packs (Hochvolt-Batterien, Hochvolt-Akkus) oder in der
Leistungselektronik, erfordert spezielle Sicherheitsmaßnahmen. Dazu gehört eine HV-sichere Messkette vom Sensor bis zur
Datenerfassung. Die HV-Messtechnik von CSM bietet deshalb ein mehrstufiges Sicherheitskonzept nach DIN EN 61010, das
Messmodule, Kabel und Steckverbinder umfasst.
Durch die nahtlose Integration der Messmodule der CSM GmbH in die Vector Messsoftware stehen Ihnen zuverlässige
Lösungen zur Temperatur- und Spannungsmessung zur Verfügung.
Bild 16 Beispiel eines Messaufbaus im HV-Umfeld mit CSM-Messsystem
Weitere Informationen zu Messmodulen finden Sie hier.
Gerade im Bereich der E-Mobility gibt es viele Größen, die nicht direkt gemessen, sondern errechnet werden. Mehr dazu finden
Sie in Kapitel 6.1.
16Alles Messen
5.4 Messungen am Verbrennungsmotor
Neben der weitverbreiteten Messtechnik für Spannungen und Temperaturen gibt es auch spezifische Messtechnik (NOx,
Lambda, …) für Abgassysteme.
Die CSM-OEM-Variante LambdaCANc liefert die Lambda-Messwerte über den CAN Bus. Als Sonden können die
Standardseriensonden (LSU 4.2, 4.9, ADV …) verwendet werden.
Bild 17 Lambda-Messsystem
Weitere Informationen finden Sie auf der Internetseite von CSM.
17Alles Messen
5.5 Messung von Kühlmittelkreisläufen
Hier werden Temperaturen und Drücke erfasst. Neben der Darstellung der einzelnen Werte als Graph oder Zahl steht noch die
Darstellung des thermodynamischen Zustandsdiagramms zur Verfügung (Option Thermodynamik erforderlich).
Bild 18 Beispiel für die Visualisierung von Kühlmittelkreisläufen mit thermodynamischen Zustandsdiagramm.
6 Nicht Messbare Größen errechnen
Manche physikalischen Werte lassen sich nicht oder nur mit hohem Aufwand direkt messen. Sie werden aus anderen Größen
errechnet. Dafür stehen mathematische Funktionen in den Werkzeugen zur Verfügung. Es stehen verschiedene Möglichkeiten
zur Verfügung, die Berechnungen durchzuführen.
Die interne Funktions- und Skriptsprache „CASL“ ist C-ähnlich und auf den Umgang mit Messgrößen optimiert. Liegen
Berechnungen und Funktionen schon in Form von Simulink Modellen oder C/C++ Code vor, können diese so kompiliert werden,
dass sie direkt in CANape und den daraus abgeleiteten Werkzeuge integriert werden können. Sie können somit die mit
ausgelieferten Funktionsbibliotheken erweitern.
6.1 eMobilityAnalyzer für Elektrofahrzeuge
Beispielsweise werden elektrische Leistungen aus der Multiplikation von Spannung und Strom berechnet. Die Herausforderung
ist dabei, die hochfrequente Abtastung der Werte zu erfassen und online zu verrechnen.
Für die Leistungsberechnung in Elektrofahrzeugen steht dafür der „eMobilityAnalyzer“ zur Verfügung. Es handelt sich um eine
Funktionsbibliothek, die in CANape, CANape log, vMeasure exp, vMeasure log und vSignalyzer zur Verfügung steht. Auf der
Grundlage der hochfrequent abgetasteten Werte der Netzströme und Netzspannungen werden verschiedene Ergebnisse
errechnet. Beispielsweise alle elektrischen Parameter einer E-Maschine, die Effizienz eines Drei-Phasen-Inverters oder der
Wirkungsgrad eines Bordladegeräts.
18Alles Messen
7 Diagnosedaten
CANape bietet den symbolischen Zugriff auf Diagnosedaten im Steuergerät bzw. Fahrzeug. Die Diagnosedaten und -services
sind in Beschreibungsdateien definiert. CANape unterstützt unterschiedliche Beschreibungsformate wie z. B. CDD und ODX.
Als Diagnoseprotokolle stehen UDS (CAN, FlexRay, Ethernet) und KWP2000 (CAN, K-Line) zur Verfügung.
Für die Nutzung von OBD liefert CANape die Beschreibungsdatei intern mit, sodass es genügt in der Gerätekonfiguration ein
OBD-Gerät anzulegen, um Zugriff auf OBD-Daten zu erhalten.
Lesender und schreibender Zugriff auf Diagnosedaten erfolgt für den Benutzer transparent. CANape verwaltet im Hintergrund
die notwendigen Services, um Daten zu erfassen und zu ändern.
Neben den Standardfenstern für die Anzeige und Nutzung von Signalen und Parametern stehen weitere diagnosespezifische
Fenster zur Verfügung: Diagnose-Fenster, Fehlerspeicher-Fenster und OBD-Fenster.
Bild 19 Spezielle Diagnose-Fenster für Zugriff auf Daten, Services und Fehlerspeicher
Weitere Informationen finden Sie auf der Internetseite.
7.1 Security Mechanismen
Security-Mechanismen im Steuergerät sichern das Fahrzeug und seine Funktionen gegen Manipulationen und unberechtigte
Zugriffe ab. Für Mess-, Kalibrier- und Diagnosezwecke muss es autorisierten Personen jedoch möglich sein während der
Entwicklung und im späteren Betrieb an der Fahrzeugkommunikation teilzunehmen.
Hierfür bietet Vector mit dem Security Manager eine einheitliche Lösung, die identisch in vielen Vector Werkzeugen verwendet
wird. Neben CANape verwenden auch CANalyzer, CANoe, vFlash, Indigo und CANoe.DiVa den Security Manager.
Anwendungsfälle: Authentifizierung und Varianten-Codierung
Weitere Informationen finden Sie auf der Internetseite.
8 Messdaten aus Virtuellen Steuergeräten erfassen
Neben den typischen Datenquellen wie Steuergeräten und Bussystemen können auch Daten aus Computer-basierten
Ablaufumgebungen gemessen werden.
Während reale Steuergeräte in Echtzeit arbeiten, können Computer-basierte Umgebungen wesentlich schneller oder auch
langsamer als in Echtzeit arbeiten. CANape kann sich vollständig dem zeitlichen Verhalten des virtuellen Steuergeräts
19Alles Messen
anpassen, indem die Zeitstempel des virtuellen Steuergeräts per XCP übertragen und als Zeitbasis von CANape verwendet
werden.
8.1 Virtuelles Steuergerät in Simulink
Zum Testen eines Algorithmus in Simulink, müssen
> Eingangsgrößen als Stimulation des Algorithmus vorhanden sein,
> Signalverläufe erfasst und dargestellt werden,
> Parameterwerte optimiert werden.
Fügt man den Simulink XCP-Server zum Simulink-Modell hinzu (siehe Downloadbereich Vector MATLAB/Simulink MC Add-on),
steht ein direkter XCP-Zugang zum Modell zur Verfügung. Der Server generiert auch direkt eine A2L-Datei der im Modell
enthaltenen Objekte und ein CANape Projekt, so dass in CANape alles zur Verfügung steht, um direkt Signalverläufe zu messen
und Parameter zu verstellen.
Bild 20 Simulink XCP-Server wird in Simulink-Modell integriert und stellt die XCP-Verbindung zur Verfügung
Ihre Vorteile:
> Sie können damit alle Messgrößen des Modells erfassen.
> Die XCP-on-Ethernet-Schnittstelle erlaubt es, dass CANape und Simulink auf zwei unterschiedlichen PCs laufen.
> Die Parameter (beispielsweise Kennfelder) können komfortabel in CANape geändert und in das Modell geschrieben
werden.
> Existierende Parametersätze laden Sie einfach in das Modell (MATLAB Workspace).
> Über die Schnittstelle können auch direkt Daten aus CANape in das Modell übergeben werden. So verknüpfen Sie den
Eingangsvektor direkt aus einer Messdatei mit den Eingängen des Modells, ohne sich mit der Einbindung von
Messdateien in das Modell zu beschäftigen.
> Zusätzlich zur Modellvisualisierung in Simulink können Sie das Modell auch in CANape anzeigen.
Weitere Informationen finden Sie hier.
8.2 Virtuelles Steuergerät in CANape
CANape unterstützt die Möglichkeit, DLLs zu integrieren. Beispielsweise kann aus Simulink-Modellen Code für die Zielplattform
CANape generiert werden, um einen Netzwerk-Knoten abzubilden. Das Gleiche funktioniert auch ohne den modellbasierten
Ansatz, indem der Code direkt für CANape geschrieben wird.
Die DLL wird als Gerät in CANape eingebunden und per A2L beschrieben. CANape verfügt über einen direkten XCP-Zugang
zur DLL. Der Benutzer kann die Eingänge des Modells direkt mit Signalen aus CANape verbinden, sodass der Algorithmus in
der DLL die notwendigen Daten für die Berechnung erhält. Über die XCP-Verbindung setzt der Benutzer dann die Parameter
auf die gewünschten Werte bzw. misst alle gewünschten Größen direkt aus der DLL.
20Alles Messen
Bild 21 Über das Funktionsfenster können die DLLs mit Eingangssignalen versorgt und miteinander verknüpft werden
Während einer Messung läuft die DLL mit und der Benutzer kann z. B. die Ergebnisse der DLL parallel zu den Ergebnissen des
Steuergeräts anzeigen und vergleichen, um zu sehen, ob der neue Algorithmus in der DLL besser ist als der im Steuergerät.
Damit das Ablaufverhalten der DLL nicht vom zeitlichen Verhalten des PCs abhängig ist, bietet sich die Echtzeit-Plattform
VN8900 an. Ist ein VN8900 an CANape angeschlossen, kann der Benutzer einfach die auszuführende DLL in das VN8900
verlagern und die Berechnung des Algorithmus erfolgt auf dem VN8900-internen Echtzeitkern.
8.3 Virtuelles Steuergerät in CANoe
Ähnlich wie CANape unterstützt auch CANoe die Möglichkeit, DLLs zu integrieren. Beispielsweise kann aus Simulink-Modellen
Code für die Zielplattform CANoe generiert werden, um einen Netzwerkknoten abzubilden. In diesem Fall ist der
Netzwerkknoten ein virtuelles Steuergerät, das im Verbund mit anderen realen oder virtuellen Steuergeräten arbeitet.
Nach der Code-Generierung und dem Compiler-Lauf steht eine DLL zur Verfügung, die nahtlos in CANoe eingebettet werden
kann. Im Code-Generierungs-Prozess wird dafür gesorgt, dass die DLL über eine XCP-Schnittstelle verfügt, mit der CANape
zur Laufzeit in CANoe eine Mess- und Kalibrierverbindung zur DLL aufbauen kann.
Bild 22 Modell läuft in CANoe und hat eine direkte XCP-Kopplung zu CANape
21Alles Messen
9 Engineering-Dienstleistungen
Damit Sie sich voll auf die Steuergerätekalibrierung konzentrieren können, unterstützt Vector Sie sowohl mit Know-how als
auch mit maßgeschneiderten Komplettlösungen für Ihre Aufgabenstellungen.
Das Dienstleistungsangebot umfasst unter anderem:
> Integration Ihrer Hardware durch protokollspezifische Treiber (z.B. für ADAS-Sensoren)
> Automatisierung von Messdaten-Auswertungen
> Unterstützung bei der Integration in die modellbasierte Entwicklung mit MATLAB/Simulink
> Erstellung und Pflege komplexer Konfigurationen
> Aufsetzen eines A2L-Generierungs-Prozesses
Weiterführende Informationen finden Sie im Internet.
22Mehr Informationen Besuchen Sie unsere Website für: > News > Produkte > Demo-Software > Support > Seminare und Workshops > Kontaktadressen www.vector.com
Sie können auch lesen