Bedienungsanleitung Sicherheitsinformationen für Notfälle - Sicherheitsinformationen für Notfälle
←
→
Transkription von Seiteninhalten
Wenn Ihr Browser die Seite nicht korrekt rendert, bitte, lesen Sie den Inhalt der Seite unten
ROBOTICS Bedienungsanleitung Sicherheitsinformationen für Notfälle
Trace back information: Workspace 21A version a10 Checked in 2021-03-16 Skribenta version 5.4.005
Bedienungsanleitung
Sicherheitsinformationen für Notfälle
Dokumentnr: 3HAC027098-003
Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.
Spezifikationen können ohne vorherige Ankündigung geändert werden.Die Informationen in diesem Handbuch können ohne vorherige Ankündigung geändert
werden und stellen keine Verpflichtung von ABB dar. ABB übernimmt keinerlei
Verantwortung für etwaige Fehler, die dieses Handbuch enthalten kann.
Wenn nicht ausdrücklich in vorliegendem Handbuch angegeben, gibt ABB für keine
hierin enthaltenen Informationen Sachmängelhaftung oder Gewährleistung für
Verluste, Personen- oder Sachschäden, Verwendbarkeit für einen bestimmten Zweck
oder Ähnliches.
In keinem Fall kann ABB haftbar gemacht werden für Schäden oder Folgeschäden,
die sich aus der Anwendung dieses Dokuments oder der darin beschriebenen
Produkte ergeben.
Dieses Handbuch darf weder ganz noch teilweise ohne vorherige schriftliche
Genehmigung von ABB vervielfältigt oder kopiert werden.
Zur späteren Verwendung aufbewahren.
Zusätzliche Kopien dieses Handbuchs können von ABB bezogen werden.
Übersetzung der Originalbetriebsanleitung.
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.
Spezifikationen können ohne vorherige Ankündigung geändert werden.Inhaltsverzeichnis
Inhaltsverzeichnis
Überblick über dieses Handbuch ..................................................................................................... 7
1 Sicherheitsinformationen für Notfälle 9
1.1 Stoppen des Roboters und Abschalten der Stromversorgung .................................... 9
1.2 Manuelles Lösen der Bremsen ............................................................................. 10
1.3 Brandbekämpfung ............................................................................................. 14
Index 15
Bedienungsanleitung - Sicherheitsinformationen für Notfälle 5
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.Diese Seite wurde absichtlich leer gelassen
Überblick über dieses Handbuch
Überblick über dieses Handbuch
Über dieses Handbuch
Dieses Handbuch enthält Informationen für Notsituationen im Zusammenhang mit
dem Roboter.
Hinweis
Vor dem Beginn von Arbeiten an oder mit dem Roboter müssen die
Sicherheitshinweise im Produkthandbuch für Steuerung und Manipulator gelesen
werden.
Hinweis
Dieses Handbuch muss immer zusammen mit dem Roboter aufbewahrt werden.
Dieses Handbuch muss für den Bediener, Servicetechniker oder jede Person,
die den Roboter nutzt oder damit arbeitet, zu allen Zeiten leicht zugänglich sein.
Hinweis
Es liegt in der Verantwortung des Integrators die Sicherheits- und
Benutzerhandbücher für das Robotersystem bereitzustellen.
Voraussetzungen
Instandhaltungs-/Reparatur-/Installationspersonal, das an einem ABB-Roboter
arbeitet, muss:
• von ABB geschult sein und die erforderlichen Kenntnisse über mechanische
und elektrische Installations-/Reparatur-/Wartungsarbeiten besitzen.
• Lesen Sie vor dem Beginn jeglicher Installations- oder Wartungsarbeiten am
Roboter die Anwenderdokumentation.
Referenzen
Die im Folgenden aufgeführten Dokumente beschreiben den Roboter im Detail
und enthalten Wartungs- sowie Sicherheitsanweisungen. Alle Dokumente stehen
im myABB-Unternehmensportal zur Verfügung: www.myportal.abb.com.
Referenz Dokumentnummer
Sicherheitshandbuch für den Roboter - Manipulator und IRC5 3HAC031045-003
oder OmniCore-Steuerung i
Produkthandbuch für den Manipulator
Produkthandbuch für den Controller
i Dieses Handbuch enthält alle Sicherheitsanweisungen aus den Produkthandbüchern für die
Manipulatoren und Steuerungen.
Fortsetzung auf nächster Seite
Bedienungsanleitung - Sicherheitsinformationen für Notfälle 7
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.Überblick über dieses Handbuch
Fortsetzung
Revisionen
Revision Beschreibung
- Erste Revision
A Polnische Übersetzung hinzugefügt.
B IRB 360, IRB 6640 und IRB 6660 hinzugefügt.
Russische Übersetzung hinzugefügt
C IRB 4600 wurde hinzugefügt.
D IRB 120, IRB 2600, IRB 6620LX und IRC5 Compact hinzugefügt.
Ungarische Übersetzung hinzugefügt.
E Sicherheitssignalabbildungen für die Stufen Gefahr und Warnung aktua-
lisiert.
F IRB 460 und IRB 760 hinzugefügt.
Warnung zum Abschnitt Hauptschalter auf Seite 9 hinzugefügt.
G IRB 1620ID wurde hinzugefügt.
Gelöschter Abschnitt „Externe Stromversorgung für Bremslöseeinheit“.
Der Anschluss einer externen Stromversorgung für die Bremslösetasten
wird in den jeweiligen Manipulatorhandbüchern erklärt.
H IRB 1620ID entfernt.
IRB 1520ID wurde hinzugefügt.
J IRB 6700 wurde hinzugefügt.
K IRB 1200 wurde hinzugefügt.
L IRB 14000 wurde hinzugefügt.
IRB 8700 wurde hinzugefügt.
M IRB 910SC hinzugefügt.
IRB 1660ID hinzugefügt.
N IRB 6790 hinzugefügt.
P OmniCore hinzugefügt.
IRB 910INV hinzugefügt.
IRB 1100 hinzugefügt.
IRB 14050 hinzugefügt.
Q IRB 1300 hinzugefügt.
R IRB 390 hinzugefügt.
S Neu strukturierter Abschnitt Manuelles Lösen der Bremsen auf Seite 10.
Produktnamen mit generischen Informationen entfernt.
8 Bedienungsanleitung - Sicherheitsinformationen für Notfälle
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.1 Sicherheitsinformationen für Notfälle
1.1 Stoppen des Roboters und Abschalten der Stromversorgung
1 Sicherheitsinformationen für Notfälle
1.1 Stoppen des Roboters und Abschalten der Stromversorgung
Not-Aus-Tasten
Drücken Sie sofort eine der Not-Aus-Tasten, wenn eine Person im Arbeitsbereich
des Roboters gefährdet ist oder wenn der Roboter Schäden an der Ausrüstung
verursacht.
Je nach Zellenbauart kann es mehr als eine Not-Aus-Taste geben.
Hauptschalter
Die Steuerung verfügt über einen Hauptnetzschalter, der sich gewöhnlich an der
Vorderseite befindet.
Hinweis
Möglicherweise verfügt Ihre Anlage oder Zelle über zusätzliche Ausrüstung, die
ebenfalls ausgeschaltet werden muss. Konsultieren Sie die Unterlagen zu Ihrer
Anlage oder Zelle, um zu erfahren, wo sich diese Schalter befinden.
An jedem angeschlossenen Antriebsmodul oder anderen angeschlossenen
Modulen, z. B. einem Punktschweißschrank, befindet sich ein eigener
Hauptnetzschalter. Bei anderen Schranktypen befindet sich der Netzschalter häufig
links oben an der Vorderseite des Schranks.
WARNUNG
Nur der Hauptschalter am Antriebsmodul schaltet die Stromversorgung des
Gesamtsystems in einem MultiMove-System (Steuer- und Antriebsmodul) ab,
wenn die Stromversorgung des Control Modules vom Antriebsmodul ausgeht.
Zurücksetzen nach einem Not-Halt
Stellen Sie sicher, dass die gefährliche Situation, die den Not-Halt verursacht hat,
nicht mehr besteht, bevor Sie die Not-Halt-Taste zurücksetzen.
Alle Not-Aus-Tasten mit Drucktasten haben einen Sperrmechanismus, der gelöst
werden muss, damit der Not-Aus-Zustand entfernt werden kann.
Alle automatischen Not-Aus-Vorrichtungen verfügen ebenfalls über eine Sperre,
die gelöst werden muss. Konsultieren Sie dazu die Unterlagen zu Ihrer Anlage
oder Zelle.
Bedienungsanleitung - Sicherheitsinformationen für Notfälle 9
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.1 Sicherheitsinformationen für Notfälle
1.2 Manuelles Lösen der Bremsen
1.2 Manuelles Lösen der Bremsen
Überblick
Stellen Sie sicher, dass jeglicher Versuch eine vom Roboterarm eingeklemmte
Person zu befreien, kein weiteres Verletzungsrisiko birgt.
Durch das Lösen der Roboterhaltebremsen kann der Roboter manuell bewegt
werden, jedoch sind nur kleine Roboter leicht genug, um ohne mechanische
Hilfsmittel bewegt zu werden. Zum Bewegen von größeren Robotern ist
möglicherweise ein Traversenkran o. ä. erforderlich. Stellen Sie sicher, dass die
richtige Ausrüstung zur Verfügung steht, bevor Sie die Bremsen lösen.
WARNUNG
Stellen Sie vor dem Lösen der Bremsen sicher, dass das Gewicht der
Roboterarme nicht den Druck auf die eingeklemmte Person verstärkt und so
mögliche Verletzungen noch verschlimmert.
WARNUNG
Um die Bremslöseeinheit oder das Bremslösewerkzeug verwenden zu können,
müssen die Bremsen von der Steuerung oder über die externe Stromversorgung
mit Strom versorgt werden.
Befreien einer vom Roboterarm eingeklemmten Person
Gehen Sie wie folgt vor, um eine vom Roboterarm eingeklemmte Person zu befreien.
Aktion Info/Illustration
1 Drücken Sie eine beliebige Not-Aus-Taste.
2
GEFAHR
Beim Lösen der Haltebremsen bewegen
sich die Roboterachsen sehr schnell und
unter Umständen auf nicht vorhersehbare
Weise.
Stellen Sie sicher, dass das Gewicht des
Roboterarms nicht den Druck auf die ein-
geklemmte Person verstärkt und so mögli-
che Verletzungen noch verschlimmert.
3 Finden Sie die Bremslöseeinheit. Die Bremslöseeinheit ist im Roboterrahmen
Einige Roboter verfügen über ein Bremslö- oder -sockel oder an der Robotersteuerung
sewerkzeug. Dieses sollte in der Nähe des angebracht. Je nach Robotermodell kann
Roboters aufbewahrt werden. die Position etwas variieren. Die Bremslö-
seeinheit ist mit einer Platte oder Klemme
geschützt.
Fortsetzung auf nächster Seite
10 Bedienungsanleitung - Sicherheitsinformationen für Notfälle
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.1 Sicherheitsinformationen für Notfälle
1.2 Manuelles Lösen der Bremsen
Fortsetzung
Aktion Info/Illustration
4 Lösen Sie die Haltebremse einer bestimm- Sobald die Taste oder das Bremslösewerk-
ten Roboterachse, indem Sie die jeweilige zeug gelöst wird, funktioniert die Bremse
Taste an der internen Bremslöseeinheit wieder.
gedrückt halten.
Für Roboter mit einem Bremslösewerk-
zeug. Halten Sie das Werkzeug an die
Achse.
5 Bewegen Sie den Roboter in eine Position,
die das Befreien der eingeklemmten Per-
son ermöglicht.
6 Helfen Sie der eingeklemmten Person und
stellen Sie sicher, dass sie medizinisch
versorgt wird.
7 Stellen Sie sicher, dass die Roboterzelle
abgesperrt ist, so dass keine andere Per-
son verletzt werden kann.
Bremslöseeinheit, Achse für Achse
An vielen Roboter gibt eine Taste für jede Achse.
Die Grafik unten zeigt eine Bremslöseeinheit für einen Roboter mit sechs Achsen.
Bei vierachsigen Robotern werden die Tasten 4 und 5 nicht verwendet.
1 2 3 4 5 6
xx1100000620
Bei großen Robotern befindet sich die Bremslöseeinheit auf dem Roboterrahmen,
üblicherweise neben dem Achse-2-Motor.
Bei den Robotermodellen mittlerer Größe befindet sich die Bremslöseeinheit am
Robotersockel.
Bremslöseeinheit, Roboter mit einer Bremslösetaste
Bei kleinen Robotermodellen gibt es eine Taste, die alle Achsen freigibt. Die
Bremslöseeinheit befindet sich am Robotersockel.
Der IRB 120-Roboter besitzt keine Bremslösetaste. Verwenden Sie stattdessen
die Bremslösetaste an der IRC5-Compact-Steuerung. Bei anderen
Steuerungsvarianten hängt die Position von der Bauart der Zelle ab.
xx0900000379
Fortsetzung auf nächster Seite
Bedienungsanleitung - Sicherheitsinformationen für Notfälle 11
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.1 Sicherheitsinformationen für Notfälle
1.2 Manuelles Lösen der Bremsen
Fortsetzung
A Taste zum Lösen der Bremsen, IRC5 Compact-Steuerung
An Delta-Robotern befindet sich die Bremsenlösetaste am Sockel des Roboters,
nahe der Mitte. Bei begrenzter Zugänglichkeit zum Sockel kann es auch eine
externe Einheit geben.
xx0700000435
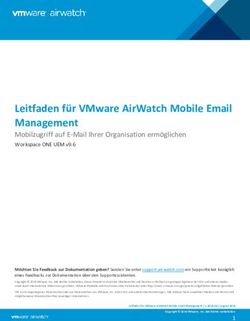
Bei tischmontierten SCARA-Robotern befindet sich die Bremslösetaste am Oberarm.
Bei den hängend montierten SCARA-Robotern befindet sich die Bremslösetaste
im Robotersockel.
xx1500002173
Fortsetzung auf nächster Seite
12 Bedienungsanleitung - Sicherheitsinformationen für Notfälle
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.1 Sicherheitsinformationen für Notfälle
1.2 Manuelles Lösen der Bremsen
Fortsetzung
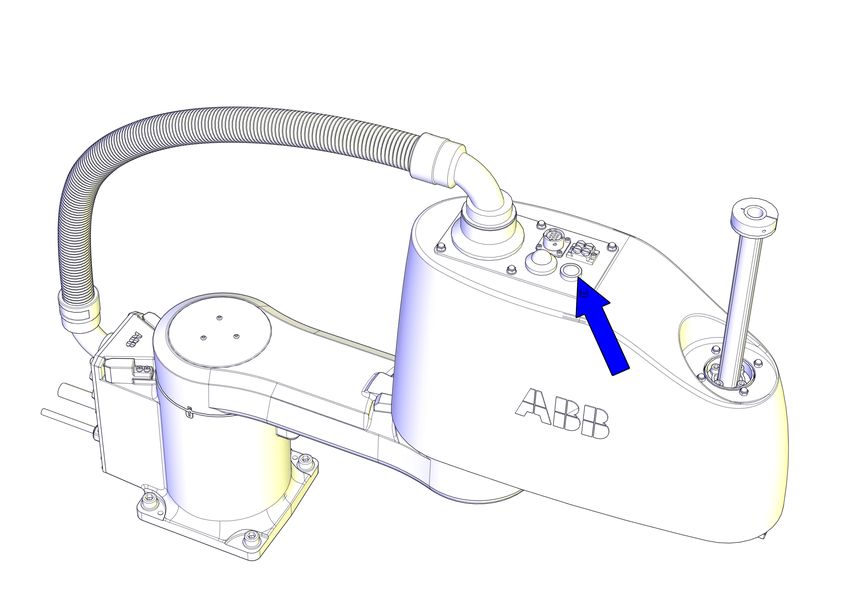
Auf dem IRB 14000 Roboter sind zwei Bremslösetasten an der Vorderseite
angebracht, eine für jeden Roboterarm.
xx1400002126
Bremslösewerkzeug
Für Roboter mit dem Bremslösewerkzeug befinden sich die Punkte für die Freigabe
der Bremse an jeder Achse.
Bedienungsanleitung - Sicherheitsinformationen für Notfälle 13
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.1 Sicherheitsinformationen für Notfälle
1.3 Brandbekämpfung
1.3 Brandbekämpfung
Hinweis
Verwenden Sie einen KOHLENDIOXID (CO2)-Feuerlöscher, falls ein Brand im
Roboter auftritt.
14 Bedienungsanleitung - Sicherheitsinformationen für Notfälle
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.Index
Index L
Lösen des Roboterarms, 10
B N
Brandbekämpfung, 14 Netzschalter, 9
Bremslöseeinheit Not-Aus-Taste, 9
kleine Roboter, 11
S
H Sicherheit
Haltebremsen, 10 Brandbekämpfung, 14
Hauptschalter, 9
Z
K Zurücksetzen nach einem Not-Halt, 9
Kohlendioxid-Feuerlöscher, 14
Bedienungsanleitung - Sicherheitsinformationen für Notfälle 15
3HAC027098-003 Revision: S
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.ABB AB
Robotics & Discrete Automation
S-721 68 VÄSTERÅS, Sweden
Telephone +46 (0) 21 344 400
ABB AS
Robotics & Discrete Automation
Nordlysvegen 7, N-4340 BRYNE, Norway
Box 265, N-4349 BRYNE, Norway
Telephone: +47 22 87 2000
ABB Engineering (Shanghai) Ltd.
Robotics & Discrete Automation
No. 4528 Kangxin Highway
PuDong District
SHANGHAI 201319, China
Telephone: +86 21 6105 6666
ABB Inc.
Robotics & Discrete Automation
1250 Brown Road
Auburn Hills, MI 48326
USA
Telephone: +1 248 391 9000
abb.com/robotics
3HAC027098-003, Rev S, de
© Copyright 2007-2021 ABB. Alle Rechte vorbehalten.
Spezifikationen können ohne vorherige Ankündigung geändert werden.Sie können auch lesen